Mạch xung - Hướng dẫn nhanh
A Signalkhông chỉ mang thông tin mà nó còn đại diện cho tình trạng của mạch. Hoạt động của bất kỳ mạch nào có thể được nghiên cứu bởi tín hiệu mà nó tạo ra. Do đó, chúng tôi sẽ bắt đầu hướng dẫn này với phần giới thiệu ngắn gọn về các tín hiệu.
Tín hiệu điện tử
Một tín hiệu điện tử tương tự như một tín hiệu bình thường mà chúng ta bắt gặp, nó chỉ ra điều gì đó hoặc thông báo về điều gì đó. Biểu diễn đồ họa của tín hiệu điện tử cung cấp thông tin liên quan đến sự thay đổi định kỳ của các tham số như biên độ hoặc pha của tín hiệu. Nó cũng cung cấp thông tin liên quan đến điện áp, tần số, khoảng thời gian, v.v.
Biểu diễn này mang lại một số hình dạng cho thông tin được truyền tải hoặc cho tín hiệu nhận được. Hình dạng tín hiệu như vậy khi được hình thành theo một biến thể nhất định, có thể được đặt các tên khác nhau, chẳng hạn như tín hiệu hình sin, tín hiệu tam giác, tín hiệu răng cưa và tín hiệu sóng vuông v.v.
Những tín hiệu này chủ yếu có hai loại được gọi là tín hiệu một chiều và hai chiều.
Unidirectional Signal - Tín hiệu khi chỉ truyền theo một hướng dương hoặc âm, tín hiệu đó được gọi là tín hiệu một chiều.
Example - Tín hiệu xung.
Bidirectional Signal - Tín hiệu khi thay đổi theo cả hai chiều tích cực và tiêu cực đi qua điểm 0, tín hiệu đó được gọi là tín hiệu hai chiều.
Example - Tín hiệu hình sin.
Trong chương này, chúng ta sẽ thảo luận về các tín hiệu xung và các tính năng đặc trưng của chúng.
Tín hiệu xung
Hình dạng xung được hình thành do sự thay đổi nhanh chóng hoặc đột ngột nhất thời từ giá trị cơ sở sang giá trị cấp cao hơn hoặc thấp hơn, giá trị này sẽ trở về cùng giá trị cơ sở sau một khoảng thời gian nhất định. Một tín hiệu như vậy có thể được gọi là Tín hiệu xung.
Hình minh họa sau đây cho thấy một chuỗi các xung.

Tín hiệu xung là tín hiệu một chiều, không phải hình sin, tương tự như tín hiệu vuông nhưng nó không đối xứng như sóng vuông. Một chuỗi các tín hiệu xung liên tục được gọi đơn giản là một chuỗi xung. Một chuỗi các xung biểu thị mức cao đột ngột và mức thấp đột ngột chuyển đổi từ mức cơ bản có thể được hiểu là BẬT / TẮT tương ứng.
Do đó một tín hiệu xung cho biết BẬT & TẮT của tín hiệu. Nếu một công tắc điện được cấp một đầu vào xung, nó sẽ BẬT / TẮT theo tín hiệu xung đã cho. Các công tắc này tạo ra tín hiệu xung có thể được thảo luận sau.
Điều khoản liên quan đến tín hiệu xung
Có một số thuật ngữ liên quan đến tín hiệu xung mà người ta nên biết. Những điều này có thể được hiểu với sự trợ giúp của hình sau.

Từ hình trên,
Pulse width - Độ dài của xung
Period of a waveform - Phép đo từ bất kỳ điểm nào trên một chu kỳ đến cùng một điểm trong chu kỳ tiếp theo
Duty cycle - Tỷ lệ độ rộng xung với chu kỳ
Rise time - Thời gian cần để tăng từ 10% đến 90% biên độ tối đa của nó.
Fall time - Tín hiệu thời gian giảm từ 90% đến 10% biên độ tối đa của nó.
Overshoot - Được cho là xảy ra khi cạnh hàng đầu của dạng sóng vượt quá giá trị lớn nhất bình thường của nó.
Undershoot - Được cho là xảy ra khi cạnh sau của một dạng sóng vượt quá giá trị lớn nhất bình thường của nó.
Ringing - Cả thiếu hụt và vượt quá đều theo sau bởi các dao động tắt dần được gọi là chuông.
Dao động giảm âm là các biến thể tín hiệu cho biết biên độ và tần số giảm của tín hiệu không có ích và không mong muốn. Những dao động này là những nhiễu loạn đơn giản được gọi làringing.
Trong chương tiếp theo, chúng tôi sẽ giải thích khái niệm chuyển mạch trong điện tử được thực hiện bằng cách sử dụng BJT. Chúng ta đã thảo luận về việc chuyển đổi bằng điốt trong hướng dẫn MẠCH ĐIỆN TỬ. Xin vui lòng tham khảo.
Switch là một thiết bị makes hoặc là breaksmột mạch hoặc một tiếp điểm. Đồng thời, nó có thể chuyển đổi dữ liệu tương tự thành dữ liệu kỹ thuật số. Các yêu cầu chính của một công tắc để hoạt động hiệu quả là phải nhanh chóng và chuyển đổi mà không phát ra tia lửa. Các bộ phận thiết yếu là một công tắc và mạch điện liên quan của nó.
Có ba types of Switches. Họ là -
- Công tắc cơ học
- Công tắc hoặc rơ le điện cơ
- Công tắc điện tử
Công tắc cơ học
Công tắc cơ học là loại công tắc cũ hơn, chúng tôi đã sử dụng trước đây. Nhưng chúng đã được thay thế bằng công tắc cơ điện và sau đó là công tắc điện tử cũng trong một số ứng dụng, để khắc phục những nhược điểm của công tắc trước đây.
Những hạn chế của Công tắc cơ học như sau:
- Chúng có quán tính cao làm hạn chế tốc độ hoạt động.
- Chúng tạo ra tia lửa trong khi phá vỡ tiếp điểm.
- Tiếp điểm công tắc được làm nặng để mang dòng lớn hơn.
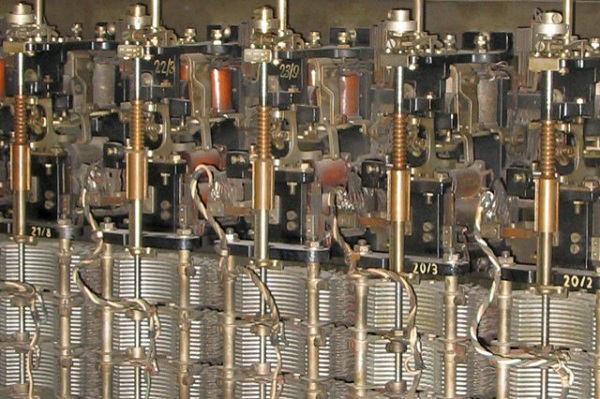
Các công tắc cơ học như trong hình bên dưới.
Các công tắc cơ học này được thay thế bằng công tắc cơ điện hoặc rơ le có tốc độ hoạt động tốt và giảm tia lửa điện.
Rơ le
Công tắc cơ điện còn được gọi là Relays. Các công tắc này là một phần cơ khí và một phần điện tử hoặc điện. Chúng có kích thước lớn hơn công tắc điện tử và nhỏ hơn công tắc cơ học.
Xây dựng Rơle
Rơle được tạo ra sao cho việc tạo tiếp điểm cung cấp năng lượng cho tải. Ở mạch bên ngoài, chúng ta có nguồn cấp cho tải và nguồn cấp cho cuộn dây để điều khiển hoạt động của rơ le. Bên trong, một đòn bẩy được nối với chạc sắt bằng một lò xo cứng để giữ đòn bẩy lên. Một Solenoid được kết nối với ách với một cuộn dây vận hành được quấn xung quanh nó. Cuộn dây này được kết nối với nguồn điện cuộn dây như đã đề cập.
Hình bên dưới giải thích cấu tạo và hoạt động của Rơle.

Làm việc của một rơ le
Khi đóng Công tắc, một đường dẫn điện được thiết lập để cung cấp năng lượng cho điện từ. Cần được kết nối bằng một lò xo nặng kéo cần lên và giữ. Điện từ khi được cung cấp năng lượng, kéo cần về phía nó, chống lại lực kéo của lò xo. Khi cần kéo được kéo, tiếp điểm di chuyển gặp tiếp điểm cố định để kết nối mạch điện. Do đó, kết nối mạch được BẬT hoặc được thiết lập và đèn phát sáng cho thấy điều này.
Khi công tắc được TẮT, điện từ không nhận được bất kỳ dòng điện nào và bị khử năng lượng. Điều này làm cho đòn bẩy không có bất kỳ lực hút nào đối với điện từ. Lò xo kéo cần gạt lên làm đứt tiếp điểm. Do đó kết nối mạch bị TẮT.
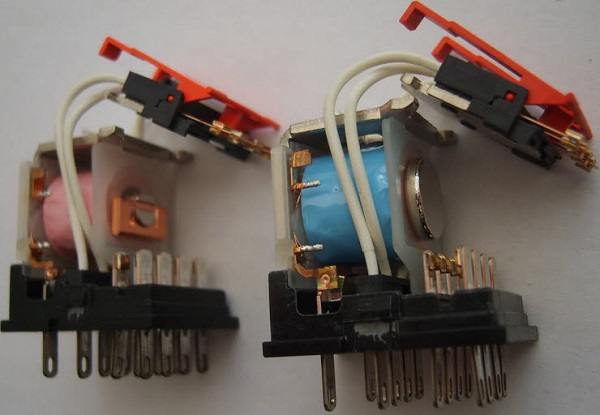
Hình dưới đây cho thấy một rơle thực tế trông như thế nào.
Bây giờ chúng ta hãy xem xét những ưu điểm và nhược điểm của một công tắc điện từ.
Ưu điểm
- Một rơ le tiêu thụ ít năng lượng hơn, thậm chí để xử lý một công suất lớn ở tải.
- Người vận hành có thể ở khoảng cách xa hơn, thậm chí để xử lý điện áp cao.
- Không phát tia lửa khi BẬT hoặc TẮT.
Nhược điểm
- Hoạt động chậm
- Các bộ phận dễ bị mòn và rách
Các loại chốt trong rơ le
Có nhiều loại rơ le tùy thuộc vào phương thức hoạt động của chúng như rơ le điện từ, rơ le trạng thái rắn, rơ le nhiệt, rơ le lai, rơ le sậy, v.v.
Rơ le thực hiện kết nối với sự trợ giúp của chốt, như thể hiện trong hình sau.

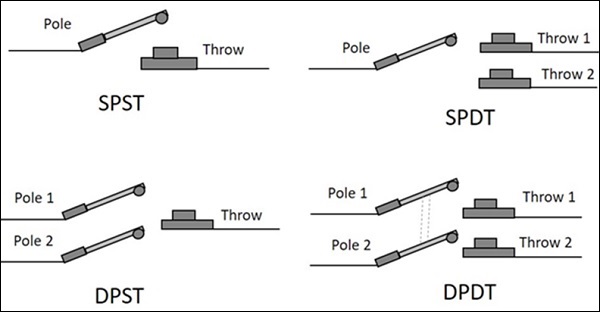
Có bốn loại kết nối chốt trong rơ le. Họ là -
Single Pole Single Throw (SPST) - Chốt này có một cực duy nhất và được ném vào một quả ném duy nhất để tạo kết nối.
Single Pole Double Throw (SPDT)- Chốt này có một cực đơn và đôi ném để tạo mối nối. Nó có một lựa chọn để tạo kết nối với hai mạch khác nhau mà hai quả ném đã được kết nối.
Double Pole Single Throw (DPST)- Chốt này có một cực đôi và một ném để tạo mối liên kết. Bất kỳ mạch nào trong hai mạch đều có thể chọn để tạo kết nối với mạch có sẵn trong một lần ném.
Double Pole Double Throw (DPDT) - Chốt này có một cực kép và được ném lên ném kép để tạo hai kết nối cùng một lúc.
Hình dưới đây cho thấy dạng sơ đồ của tất cả bốn loại kết nối chốt.
Công tắc điện tử
Loại công tắc tiếp theo được thảo luận là Công tắc điện tử. Như đã đề cập trước đó, bóng bán dẫn là công tắc điện tử được sử dụng nhiều nhất chohigh operating speed và absence of sparking.
Hình ảnh sau đây cho thấy một mạch điện tử thực tế được chế tạo để làm cho bóng bán dẫn hoạt động như một công tắc.

Transistor hoạt động như một công tắc ở điều kiện ON, khi nó hoạt động trong vùng bão hòa. Nó hoạt động như một công tắc ở điều kiện TẮT, khi nó được vận hành trong vùng cắt. Nó hoạt động như một bộ khuếch đại trong vùng tuyến tính, nằm giữa bóng bán dẫn và cắt. Để có ý tưởng về các khu vực hoạt động này, hãy tham khảo chương bóng bán dẫn từ hướng dẫn ĐIỆN TỬ CƠ BẢN.
Khi các điều kiện bên ngoài quá mạnh và nhiệt độ cao chiếm ưu thế, thì một bóng bán dẫn bình thường và đơn giản sẽ không làm được. Một thiết bị đặc biệt có tên làSilicon Control Rectifier, đơn giản SCRđược sử dụng cho các mục đích như vậy. Điều này sẽ được thảo luận chi tiết, trong phần hướng dẫn ĐIỆN TỬ CÔNG SUẤT.
Ưu điểm của công tắc điện tử
Công tắc điện tử có nhiều ưu điểm như
- Kích thước nhỏ hơn
- Trọng lượng nhẹ hơn
- Hoạt động lấp lánh
- Không có bộ phận chuyển động
- Ít bị hao mòn
- Hoạt động ít tiếng ồn hơn
- Hoạt động nhanh hơn
- Rẻ hơn các thiết bị chuyển mạch khác
- Bảo trì ít hơn
- Dịch vụ không gặp sự cố vì trạng thái rắn
A transistorlà một công tắc điện tử đơn giản nhưng có tốc độ hoạt động cao. Nó là một thiết bị trạng thái rắn và các địa chỉ liên lạc đều đơn giản và do đó tránh được tia lửa điện khi đang hoạt động. Chúng ta sẽ thảo luận về các giai đoạn của hoạt động chuyển mạch trong một bóng bán dẫn trong chương tiếp theo.
A transistor được sử dụng như một công tắc điện tử bằng cách điều khiển nó vào saturation hoặc trong cut off. Vùng giữa hai vùng này là vùng tuyến tính. Một bóng bán dẫn hoạt động như một bộ khuếch đại tuyến tính trong vùng này. Độ bão hòa và cắtoff các tiểu bang được xem xét quan trọng trong vấn đề này.
Trạng thái BẬT & TẮT của bóng bán dẫn
Có hai vùng chính trong hoạt động của bóng bán dẫn mà chúng ta có thể coi là ON và OFFNhững trạng thái. Chúng bão hòa và cắtoffNhững trạng thái. Chúng ta hãy xem xét hoạt động của một bóng bán dẫn ở hai trạng thái đó.
Hoạt động trong điều kiện Cut-off
Hình dưới đây cho thấy một bóng bán dẫn trong vùng cắt.
Khi cơ sở của bóng bán dẫn được cho âm, bóng bán dẫn chuyển sang trạng thái cắt. Không có bộ sưu tập hiện tại. Do đó I C = 0.
Điện áp V CC đặt tại bộ thu, xuất hiện trên điện trở R C của bộ thu . Vì thế,
V CE = V CC
Hoạt động trong vùng bão hòa
Hình dưới đây cho thấy một bóng bán dẫn trong vùng bão hòa.

Khi điện áp cơ bản là tích cực và transistor đi vào bão hòa, tôi C chảy qua R C .
Sau đó, V CC giảm trên R C . Đầu ra sẽ bằng không.
$$I_C = I_{C(sat)} \: = \: \frac{V_{CC}}{R_C} \: and \: V_{CE} = 0$$
Thực ra đây là điều kiện lý tưởng. Thực tế, một số dòng rò rỉ chảy. Do đó, chúng ta có thể hiểu rằng một bóng bán dẫn hoạt động như một công tắc khi được điều khiển vào vùng bão hòa và cắt vùng bằng cách áp dụng điện áp dương và âm cho đế.
Hình sau đây sẽ giải thích rõ hơn.
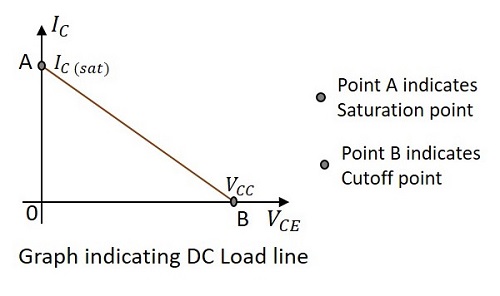
Quan sát dòng tải một chiều nối I C và V CC . Nếu bóng bán dẫn được đưa vào trạng thái bão hòa, I C chảy hoàn toàn và V CE = 0 được chỉ ra bởi điểmA.
Nếu bóng bán dẫn được dẫn vào cắt, I C sẽ bằng không và V CE = V CC được chỉ ra bởi điểm B. dòng nối điểm bão hòa A và cắt B được gọi làLoad line. Vì điện áp được áp dụng ở đây là một chiều, nó được gọi làDC Load line.
Cân nhắc thực tế
Mặc dù các điều kiện nêu trên đều thuyết phục, nhưng có một số hạn chế thực tế để những kết quả đó xảy ra.
Trong trạng thái Cut off
Một bóng bán dẫn lý tưởng có V CE = V CC và I C = 0.
Nhưng trong thực tế, một dòng điện rò rỉ nhỏ hơn chạy qua bộ thu.
Do đó I C sẽ là một vài μA.
Điều này được gọi là Collector Leakage Current đó là tất nhiên, không đáng kể.
Trong trạng thái bão hòa
Một bóng bán dẫn lý tưởng có V CE = 0 và I C = I C (sat) .
Nhưng trong thực tế, V CE giảm đến một giá trị nào đó được gọi làknee voltage.
Khi V CE giảm nhiều hơn điện áp đầu gối, β giảm mạnh.
Khi I C = βI B, điều này làm giảm dòng thu.
Do đó dòng điện tối đa I C duy trì V CE ở điện áp đầu gối, được gọi làSaturation Collector Current.
Bộ thu bão hòa hiện tại = $I_{C(sat)} \: = \: \frac{V_{CC} - V_{knee}}{R_C}$
Một bóng bán dẫn được chế tạo chỉ để làm cho nó hoạt động cho các mục đích chuyển mạch được gọi là Switching Transistor. Điều này hoạt động trong Saturation hoặc Cut off area. Trong khi ở trạng thái bão hòa,collector saturation current chảy qua tải và trong khi ở trạng thái cắt, collector leakage current chảy qua tải.
Hành động chuyển mạch của bóng bán dẫn
Một Transistor có ba vùng hoạt động. Để hiểu được hiệu quả của hoạt động, các thiệt hại thực tế phải được xem xét. Vì vậy, chúng ta hãy cố gắng tìm hiểu về cách một bóng bán dẫn hoạt động hiệu quả như một công tắc.
Trong trạng thái Cắt (TẮT)
Dòng cơ sở I B = 0
Bộ sưu tập hiện tại I C = I Giám đốc điều hành (bộ sưu tập lekeage hiện tại)
Mất điện = Điện áp đầu ra × Dòng điện đầu ra
$$= V_{CC} \times I_{CEO}$$
Vì tôi là CEO rất nhỏ và V CC cũng thấp nên khoản lỗ sẽ có giá trị rất thấp. Do đó, một bóng bán dẫn hoạt động như một công tắc hiệu quả ở trạng thái TẮT.
Trong trạng thái Bão hòa (BẬT)
Như đã thảo luận trước đó,
$$I_{C(sat)} = \frac{V_{CC} - V_{knee}}{R_C}$$
Điện áp đầu ra là Vknee.
Mất điện = Điện áp đầu ra × Dòng điện đầu ra
$$= \:V_{knee} \times I_{c(sat)}$$
Vì đầu gối V sẽ có giá trị nhỏ nên tổn thất thấp. Do đó, một bóng bán dẫn hoạt động như một công tắc hiệu quả ở trạng thái BẬT.
Trong khu vực hoạt động
Bóng bán dẫn nằm giữa trạng thái BẬT và TẮT. Bóng bán dẫn hoạt động như một bộ khuếch đại tuyến tính trong đó những thay đổi nhỏ trong dòng điện đầu vào gây ra những thay đổi lớn trong dòng điện đầu ra (ΔI C ).
Thời gian chuyển đổi
Transistor chuyển mạch có một xung làm đầu vào và một xung có ít biến thể sẽ là đầu ra. Có một số thuật ngữ mà bạn nên biết về thời gian của xung đầu ra chuyển mạch. Hãy để chúng tôi đi qua chúng.
Đặt thời lượng xung đầu vào = T
Khi xung đầu vào được áp dụng, dòng điện thu cần một khoảng thời gian để đạt đến giá trị trạng thái ổn định, do các điện dung lạc chỗ. Hình sau giải thích khái niệm này.

Từ hình trên,
Time delay(td) - Thời gian cần thiết để dòng điện thu từ giá trị ban đầu đến 10% giá trị cuối cùng được gọi là Time Delay.
Rise time(tr) - Thời gian cần thiết để dòng điện góp đạt từ 10% giá trị ban đầu đến 90% giá trị cuối cùng được gọi là Rise Time.
Turn-on time (TON)- Tổng thời gian trễ (t d ) và thời gian tăng (t r ) được gọi làTurn-on time.
T ON = t d + t r
Storage time (ts) - Khoảng thời gian giữa mép sau của xung đầu vào đến 90% giá trị lớn nhất của đầu ra, được gọi là Storage time.
Fall time (tf) - Thời gian cần thiết để dòng điện góp đạt từ 90% giá trị cực đại đến 10% giá trị ban đầu được gọi là Fall Time.
Turn-off time (TOFF)- Tổng thời gian lưu trữ (t s ) và thời gian rơi (t f ) được định nghĩa làTurn-off time.
T TẮT = t s + t f
Pulse Width(W) - Khoảng thời gian của xung đầu ra được đo giữa hai mức 50% của dạng sóng tăng và giảm được xác định là Pulse Width.
A multivibrator mạch không là gì ngoài một switching circuit. Nó tạo ra các sóng không hình sin như sóng Vuông, sóng chữ nhật và sóng răng cưa, v.v ... Bộ đa vi mạch được sử dụng như bộ tạo tần số, bộ phân tần và bộ tạo độ trễ thời gian và cũng như phần tử bộ nhớ trong máy tính, v.v.
Transistor về cơ bản hoạt động như một bộ khuếch đại trong vùng tuyến tính của nó. Nếu giai đoạn đầu ra của bộ khuếch đại bóng bán dẫn được kết hợp với tầng khuếch đại trước đó, kết nối như vậy được cho là được ghép nối. Nếu một điện trở được sử dụng trong việc ghép nối hai giai đoạn của một mạch khuếch đại như vậy, nó được gọi làResistance coupled amplifier. Để biết thêm chi tiết, hãy tham khảo hướng dẫn AMPLIFIERS.
Multivibrator là gì?
Theo định nghĩa, A Multivibrator là một bộ khuếch đại kết hợp điện trở hai giai đoạn với phản hồi tích cực từ đầu ra của một bộ khuếch đại đến đầu vào của bộ khuếch đại kia .
Hai bóng bán dẫn được kết nối trong phản hồi để một bóng bán dẫn điều khiển trạng thái của bóng bán dẫn kia. Do đó, các trạng thái BẬT và TẮT của toàn mạch và khoảng thời gian mà các bóng bán dẫn được dẫn đến trạng thái bão hòa hoặc cắt được điều khiển bởi các điều kiện của mạch.
Hình sau cho thấy sơ đồ khối của Multivibrator.

Các loại Multivibrator
Có hai trạng thái có thể có của Multivibrator. Trong giai đoạn đầu, bóng bán dẫn Q 1 BẬT trong khi bóng bán dẫn Q 2 TẮT. Trong giai đoạn thứ hai, bóng bán dẫn Q 1 TẮT trong khi bóng bán dẫn Q 2 BẬT. Hai trạng thái này được hoán đổi cho nhau trong những khoảng thời gian nhất định tùy thuộc vào điều kiện mạch.
Tùy thuộc vào cách thức mà hai trạng thái này được hoán đổi cho nhau, Multivibrator được phân loại thành ba loại. họ đang
Astable Multivibrator
Một Astable Multivibrator là một mạch mà nó automatically switchesgiữa hai trạng thái liên tục mà không cần áp dụng bất kỳ xung bên ngoài nào cho hoạt động của nó. Vì điều này tạo ra một đầu ra sóng vuông liên tục, nó được gọi làFree-running Multivibrator. Nguồn điện một chiều là một yêu cầu phổ biến.
Khoảng thời gian của các trạng thái này phụ thuộc vào hằng số thời gian của các thành phần được sử dụng. Khi Multivibrator tiếp tục chuyển đổi, các trạng thái này được gọi là trạng thái gần như ổn định hoặc nửa ổn định. Do đó cótwo quasi-stable states cho một Astable Multivibrator.
Multivibrator đơn nhất
Một Multivibrator Monostable có a stable state và a quasi-stable state. Điều này có một đầu vào kích hoạt cho một bóng bán dẫn. Vì vậy, một bóng bán dẫn thay đổi trạng thái của nó tự động, trong khi bóng bán dẫn kia cần một đầu vào kích hoạt để thay đổi trạng thái của nó.
Vì Multivibrator này tạo ra một đầu ra duy nhất cho mỗi xung kích hoạt, điều này được gọi là One-shot Multivibrator. Multivibrator này không thể ở trạng thái gần như ổn định trong thời gian dài hơn trong khi nó vẫn ở trạng thái ổn định cho đến khi nhận được xung kích hoạt.
Bistable Multivibrator
Một Bistable Multivibrator có cả hai two states stable. Nó yêu cầu hai xung kích hoạt được áp dụng để thay đổi trạng thái. Cho đến khi đầu vào kích hoạt được đưa ra, Multivibrator này không thể thay đổi trạng thái của nó. Nó còn được gọi làflip-flop multivibrator.
Khi xung kích hoạt đặt hoặc đặt lại đầu ra, và khi một số dữ liệu, tức là cao hoặc thấp được lưu trữ cho đến khi nó bị xáo trộn, Multivibrator này có thể được gọi là Flip-flop. Để biết thêm về dép xỏ ngón, hãy tham khảo hướng dẫn về MẠCH KỸ THUẬT SỐ của chúng tôi tại:https://www.tutorialspoint.com/digital_circuits/index.htm
Để có một ý tưởng rõ ràng về cuộc thảo luận trên, chúng ta hãy xem hình sau đây.

Tất cả ba Multivibrator này sẽ được thảo luận rõ ràng trong các chương tiếp theo.
Một multivibrator đáng kinh ngạc có no stable states. Khi Multivibrator được BẬT, nó chỉ tự thay đổi trạng thái sau một khoảng thời gian nhất định được xác định bởi hằng số thời gian R C. Nguồn điện một chiều hoặc V cc được cấp cho mạch để nó hoạt động.
Cấu tạo của Astable Multivibrator
Hai bóng bán dẫn có tên Q 1 và Q 2 được kết nối phản hồi với nhau. Bộ thu của bóng bán dẫn Q 1 được nối với cực của bóng bán dẫn Q 2 thông qua tụ điện C 1 và ngược lại. Các bộ phát của cả hai bóng bán dẫn được kết nối với mặt đất. Các điện trở tải cực thu R 1 và R 4 và các điện trở phân cực R 2 và R 3 có giá trị bằng nhau. Các tụ C 1 và C 2 có giá trị bằng nhau.
Hình dưới đây cho thấy sơ đồ mạch cho Astable Multivibrator.

Hoạt động của Astable Multivibrator
Khi V cc được áp dụng, dòng thu của bóng bán dẫn tăng lên. Vì dòng điện thu phụ thuộc vào dòng điện cơ bản,
$$I_c = \beta I_B$$
Vì không có đặc điểm bóng bán dẫn nào giống nhau, một trong hai bóng bán dẫn nói rằng Q 1 có sự gia tăng dòng điện góp của nó và do đó dẫn điện. Bộ thu của Q 1 được áp dụng cho cơ sở của Q 2 đến C 1 . Kết nối này cho phép điện áp âm tăng lên tại bộ thu của Q 1 được áp dụng ở chân của Q 2 và dòng điện của bộ thu của nó giảm. Hành động liên tục này làm cho dòng thu của Q 2 giảm thêm. Dòng điện này khi được đặt vào cơ sở của Q 1 làm cho nó trở nên âm hơn và với các hành động tích lũy Q 1 trở nên bão hòa và Q 2 bị cắt. Như vậy điện áp đầu ra của Q 1 sẽ là V CE (sat) và Q 2 sẽ bằng V CC .
Tụ C 1 tích điện qua R 1 và khi điện áp trên C 1 đạt 0,7v, điều này đủ để biến transistor Q 2 đến trạng thái bão hòa. Khi điện áp này được áp dụng cho cơ sở của Q 2 , nó sẽ bão hòa, làm giảm dòng điện thu của nó. Sự giảm điện áp này tại điểm B được áp dụng cho gốc của bóng bán dẫn Q 1 đến C 2 làm cho Q 1 phân cực ngược. Một loạt các hành động này biến bóng bán dẫn Q 1 cắt và bóng bán dẫn Q 2 thành bão hòa. Lúc này điểm A có thế V CC . Tụ C 2 tích điện qua R 2 . Điện áp trên tụ C 2 này khi đến 0,7v thì tranzito Q 1 bật đến bão hoà.
Do đó điện áp đầu ra và dạng sóng đầu ra được hình thành bởi sự chuyển đổi luân phiên của các bóng bán dẫn Q 1 và Q 2 . Khoảng thời gian của các trạng thái BẬT / TẮT này phụ thuộc vào giá trị của điện trở xu hướng và tụ điện được sử dụng, tức là vào giá trị R C được sử dụng. Khi cả hai bóng bán dẫn được vận hành luân phiên, đầu ra là dạng sóng vuông, với biên độ đỉnh là V CC .
Dạng sóng
Các dạng sóng đầu ra tại các bộ thu của Q 1 và Q 2 được thể hiện trong các hình sau.

Tần số dao động
Thời gian BẬT của bóng bán dẫn Q 1 hoặc thời gian TẮT của bóng bán dẫn Q 2 được cho bởi
t 1 = 0,69R 1 C 1
Tương tự, thời gian TẮT của bóng bán dẫn Q 1 hoặc thời gian BẬT của bóng bán dẫn Q 2 được cho bởi
t 2 = 0,69R 2 C 2
Do đó, tổng khoảng thời gian của sóng vuông
t = t 1 + t 2 = 0,69 (R 1 C 1 + R 2 C 2 )
Vì R 1 = R 2 = R và C 1 = C 2 = C, tần số của sóng vuông sẽ là
$$f = \frac{1}{t} = \frac{1}{1.38 R C} = \frac{0.7}{RC}$$
Ưu điểm
Những lợi thế của việc sử dụng một bộ điều khiển đa năng đáng kinh ngạc là như sau:
- Không cần kích hoạt bên ngoài.
- Mạch thiết kế đơn giản
- Inexpensive
- Có thể hoạt động liên tục
Nhược điểm
Những hạn chế của việc sử dụng một multivibrator đáng kinh ngạc như sau:
- Sự hấp thụ năng lượng nhiều hơn trong mạch.
- Tín hiệu đầu ra có năng lượng thấp.
- Không thể đạt được chu kỳ nhiệm vụ nhỏ hơn hoặc bằng 50%.
Các ứng dụng
Astable Multivibrator được sử dụng trong nhiều ứng dụng như thiết bị radio nghiệp dư, bộ tạo mã Morse, mạch hẹn giờ, mạch tương tự và hệ thống TV.
Một multivibrator đơn nhất, như tên của nó, chỉ có one stable state. Khi bóng bán dẫn dẫn điện, bóng bán dẫn kia vẫn ở trạng thái không dẫn điện. Trạng thái ổn định là trạng thái mà bóng bán dẫn vẫn duy trì mà không bị thay đổi, trừ khi bị nhiễu bởi một số xung kích hoạt bên ngoài. Vì Monostable hoạt động trên cùng một nguyên tắc, nó có một tên gọi khác làOne-shot Multivibrator.
Xây dựng Multivibrator Monostable
Hai bóng bán dẫn Q 1 và Q 2 được kết nối phản hồi với nhau. Bộ thu của bóng bán dẫn Q 1 được nối với đế của bóng bán dẫn Q 2 thông qua tụ điện C 1 . Đế Q 1 được nối với cực thu Q 2 thông qua điện trở R 2 và tụ điện C. Một nguồn cung cấp điện áp một chiều –V BB khác được cấp cho gốc của tranzito Q 1 thông qua điện trở R 3 . Xung kích hoạt được đưa đến cơ sở của Q 1 thông qua tụ điện C 2 để thay đổi trạng thái của nó. R L1 và R L2 là điện trở tải của Q 1 và Q 2 .
One of the transistors, when gets into a stable state, an external trigger pulse is given to change its state. After changing its state, the transistor remains in this quasi-stable state or Meta-stable state for a specific time period, which is determined by the values of RC time constants and gets back to the previous stable state.
The following figure shows the circuit diagram of a Monostable Multivibrator.

Operation of Monostable Multivibrator
Firstly, when the circuit is switched ON, transistor Q1 will be in OFF state and Q2 will be in ON state. This is the stable state. As Q1 is OFF, the collector voltage will be VCC at point A and hence C1 gets charged. A positive trigger pulse applied at the base of the transistor Q1 turns the transistor ON. This decreases the collector voltage, which turns OFF the transistor Q2. The capacitor C1 starts discharging at this point of time. As the positive voltage from the collector of transistor Q2 gets applied to transistor Q1, it remains in ON state. This is the quasi-stable state or Meta-stable state.
The transistor Q2 remains in OFF state, until the capacitor C1 discharges completely. After this, the transistor Q2 turns ON with the voltage applied through the capacitor discharge. This turn ON the transistor Q1, which is the previous stable state.
Output Waveforms
The output waveforms at the collectors of Q1 and Q2 along with the trigger input given at the base of Q1 are shown in the following figures.

The width of this output pulse depends upon the RC time constant. Hence it depends on the values of R1C1. The duration of pulse is given by
$$T = 0.69R_1 C_1$$
The trigger input given will be of very short duration, just to initiate the action. This triggers the circuit to change its state from Stable state to Quasi-stable or Meta-stable or Semi-stable state, in which the circuit remains for a short duration. There will be one output pulse for one trigger pulse.
Advantages
The advantages of Monostable Multivibrator are as follows −
- One trigger pulse is enough.
- Circuit design is simple
- Inexpensive
Disadvantages
The major drawback of using a monostable multivibrator is that the time between the applications of trigger pulse T has to be greater than the RC time constant of the circuit.
Applications
Monostable Multivibrators are used in applications such as television circuits and control system circuits.
A Bistable Multivibrator has two stable states. The circuit stays in any one of the two stable states. It continues in that state, unless an external trigger pulse is given. This Multivibrator is also known as Flip-flop. This circuit is simply called as Binary.
There are few types in Bistable Multivibrators. They are as shown in the following figure.

Construction of Bistable Multivibrator
Two similar transistors Q1 and Q2 with load resistors RL1 and RL2 are connected in feedback to one another. The base resistors R3 and R4 are joined to a common source –VBB. The feedback resistors R1 and R2 are shunted by capacitors C1 and C2 known as Commutating Capacitors. The transistor Q1 is given a trigger input at the base through the capacitor C3 and the transistor Q2 is given a trigger input at its base through the capacitor C4.
The capacitors C1 and C2 are also known as Speed-up Capacitors, as they reduce the transition time, which means the time taken for the transfer of conduction from one transistor to the other.
The following figure shows the circuit diagram of a self-biased Bistable Multivibrator.

Operation of Bistable Multivibrator
When the circuit is switched ON, due to some circuit imbalances as in Astable, one of the transistors, say Q1 gets switched ON, while the transistor Q2 gets switched OFF. This is a stable state of the Bistable Multivibrator.
By applying a negative trigger at the base of transistor Q1 or by applying a positive trigger pulse at the base of transistor Q2, this stable state is unaltered. So, let us understand this by considering a negative pulse at the base of transistor Q1. As a result, the collector voltage increases, which forward biases the transistor Q2. The collector current of Q2 as applied at the base of Q1, reverse biases Q1 and this cumulative action, makes the transistor Q1 OFF and transistor Q2 ON. This is another stable state of the Multivibrator.
Now, if this stable state has to be changed again, then either a negative trigger pulse at transistor Q2 or a positive trigger pulse at transistor Q1 is applied.
Output Waveforms
The output waveforms at the collectors of Q1 and Q2 along with the trigger inputs given at the bases of QW and Q2 are shown in the following figures.

Advantages
The advantages of using a Bistable Multivibrator are as follows −
- Stores the previous output unless disturbed.
- Circuit design is simple
Disadvantages
The drawbacks of a Bistable Multivibrator are as follows −
- Two kinds of trigger pulses are required.
- A bit costlier than other Multivibrators.
Applications
Bistable Multivibrators are used in applications such as pulse generation and digital operations like counting and storing of binary information.
Fixed-bias Binary
A fixed-bias binary circuit is similar to an Astable Multivibrator but with a simple SPDT switch. Two transistors are connected in feedback with two resistors, having one collector connected to the base of the other. The figure below shows the circuit diagram of a fixed-bias binary.

To understand the operation, let us consider the switch to be in position 1. Now the transistor Q1 will be OFF as the base is grounded. The collector voltage at the output terminal VO1 will be equal to VCC which turns the transistor Q2 ON. The output at the terminal VO2 goes LOW. This is a stable state which can be altered only by an external trigger. The change of switch to position 2, works as a trigger.
When the switch is altered, the base of transistor Q2 is grounded turning it to OFF state. The collector voltage at VO2 will be equal to VCC which is applied to transistor Q1 to turn it ON. This is the other stable state. The triggering is achieved in this circuit with the help of a SPDT Switch.
There are two main types of triggering given to the binary circuits. They are
- Symmetrical Triggering
- Asymmetrical Triggering
Schmitt Trigger
Another type of binary circuit which is ought to be discussed is the Emitter Coupled Binary Circuit. This circuit is also called as Schmitt Trigger circuit. This circuit is considered as a special type of its kind for its applications.
The main difference in the construction of this circuit is that the coupling from the output C2 of the second transistor to the base B1 of the first transistor is missing and that feedback is obtained now through the resistor Re. This circuit is called as the Regenerative circuit for this has a positive feedback and no Phase inversion. The circuit of Schmitt trigger using BJT is as shown below.

Initially we have Q1 OFF and Q2 ON. The voltage applied at the base of Q2 is VCC through RC1 and R1. So the output voltage will be
$$V_0 = V_{CC} - (I_{C2}R_{c2})$$
As Q2 is ON, there will be a voltage drop across RE, which will be (IC2 + IB2) RE. Now this voltage gets applied at the emitter of Q1. The input voltage is increased and until Q1 reaches cut-in voltage to turn ON, the output remains LOW. With Q1 ON, the output will increase as Q2 is also ON. As the input voltage continues to rise, the voltage at the points C1 and B2 continue to fall and E2 continues to rise. At certain value of the input voltage, Q2 turns OFF. The output voltage at this point will be VCC and remains constant though the input voltage is further increased.
As the input voltage rises, the output remains LOW until the input voltage reaches V1 where
$$V_1 = [V_{CC} - (I_{C2}R_{C2})]$$
The value where the input voltage equals V1, lets the transistor Q1 to enter into saturation, is called UTP (Upper Trigger Point). If the voltage is already greater than V1, then it remains there until the input voltage reaches V2, which is a low level transition. Hence the value for which input voltage will be V2 at which Q2 gets into ON condition, is termed as LTP (Lower Trigger Point).
Output Waveforms
The output waveforms are obtained as shown below.

The Schmitt trigger circuit works as a Comparator and hence compares the input voltage with two different voltage levels called as UTP (Upper Trigger Point) and LTP (Lower Trigger Point). If the input crosses this UTP, it is considered as a HIGH and if it gets below this LTP, it is taken as a LOW. The output will be a binary signal indicating 1 for HIGH and 0 for LOW. Hence an analog signal is converted into a digital signal. If the input is at intermediate value (between HIGH and LOW) then the previous value will be the output.
This concept depends upon the phenomenon called as Hysteresis. The transfer characteristics of electronic circuits exhibit a loop called as Hysteresis. It explains that the output values depends upon both the present and the past values of the input. This prevents unwanted frequency switching in Schmitt trigger circuits
Advantages
The advantages of Schmitt trigger circuit are
- Perfect logic levels are maintained.
- It helps avoiding Meta-stability.
- Preferred over normal comparators for its pulse conditioning.
Disadvantages
The main disadvantages of a Schmitt trigger are
- If the input is slow, the output will be slower.
- If the input is noisy, the output will be noisier.
Applications of Schmitt trigger
Schmitt trigger circuits are used as Amplitude Comparator and Squaring Circuit. They are also used in Pulse conditioning and sharpening circuits.
These are the Multivibrator circuits using transistors. The same Multivibrators are designed using operational amplifiers and also IC 555 timer circuits, which are discussed in further tutorials.
After having discussed the fundamentals of pulse circuits, let us now go through different circuits that generate and deal with Saw tooth waves. A Saw tooth wave increases linearly with time and has a sudden decrease. This is also called as a Time base signal. Actually, this is the ideal output of a time base generator.
What is a Time Base Generator?
An Electronic generator that generates the high frequency saw tooth waves can be termed as a Time Base Generator. It can also be understood as an electronic circuit which generates an output voltage or current waveform, a portion of which varies linearly with time. The horizontal velocity of a time base generator must be constant.
To display the variations of a signal with respect to time on an oscilloscope, a voltage that varies linearly with time, has to be applied to the deflection plates. This makes the signal to sweep the beam horizontally across the screen. Hence the voltage is called as Sweep Voltage. The Time Base Generators are called as Sweep Circuits.
Features of a Time Base Signal
To generate a time base waveform in a CRO or a picture tube, the deflecting voltage increases linearly with time. Generally, a time base generator is used where the beam deflects over the screen linearly and returns to its starting point. This occurs during the process of Scanning. A cathode ray tube and also a picture tube works on the same principle. The beam deflects over the screen from one side to the other (generally from left to right) and gets back to the same point.
This phenomenon is termed as Trace and Retrace. The deflection of beam over the screen from left to right is called as Trace, while the return of the beam from right to left is called as Retrace or Fly back. Usually this retrace is not visible. This process is done with the help of a saw tooth wave generator which sets the time period of the deflection with the help of RC components used.
Let us try to understand the parts of a saw-tooth wave.

In the above signal, the time during which the output increases linearly is called as Sweep Time (TS) and the time taken for the signal to get back to its initial value is called as Restoration Time or Fly back Time or Retrace Time (Tr). Both of these time periods together form the Time period of one cycle of the Time base signal.
Actually, this Sweep voltage waveform we get is the practical output of a sweep circuit whereas the ideal output has to be the saw tooth waveform shown in the above figure.
Types of Time base Generators
There are two types of Time base Generators. They are −
Voltage Time Base Generators − A time base generator that provides an output voltage waveform that varies linearly with time is called as a Voltage Time base Generator.
Current Time Base Generator − A time base generator that provides an output current waveform that varies linearly with time is called as a Current Time base Generator.
Applications
Time Base Generators are used in CROs, televisions, RADAR displays, precise time measurement systems, and time modulation.
Errors of Sweep Signals
After generating the sweep signals, it is time to transmit them. The transmitted signal may be subjected to deviation from linearity. To understand and correct the errors occurred, we must have some knowledge on the common errors that occur.
The deviation from linearity is expressed in three different ways. They are −
- The Slope or Sweep Speed Error
- The Displacement Error
- The Transmission Error
Let us discuss these in detail.
The Slope or Sweep Speed Error (es)
A Sweep voltage must increase linearly with time. The rate of change of sweep voltage with time must be constant. This deviation from linearity is defined as Slope Speed Error or Sweep Speed Error.
Slope or Sweep speed eror es = $\frac{difference \: in\: slope\: at \: the\: beginning\: and\: end\: of\: sweep}{initial \: value \:of \: slope}$
$$= \frac{\left (\frac{\mathrm{d} V_0}{\mathrm{d} t} \right )_{t = 0} - \left( \frac{\mathrm{d} V_0}{\mathrm{d} t} \right)_{t = T_s}}{\left( \frac{\mathrm{d} V_0}{\mathrm{d} t}\right )_{t = 0}}$$
The Displacement Error (ed)
An important criterion of linearity is the maximum difference between the actual sweep voltage and the linear sweep which passes through the beginning and end points of the actual sweep.
This can be understood from the following figure.
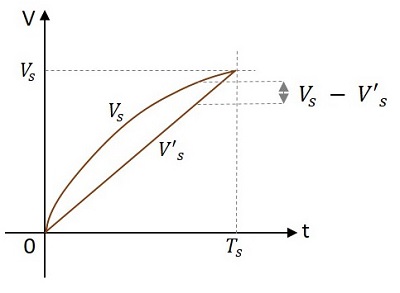
The displacement error ed is defined as
ed = $\frac{(actual\: speed)\thicksim (linear\: sweep \: that\: passes\: beginning \: and \: ending\: of\: actual\: sweep)}{amplitude\: of\: sweep\: at\: the \: end\: of\: sweep\: time}$
$$= \: \frac{(V_s - V′_s)_{max}}{V_s}$$
Where Vs is the actual sweep and V’s is the linear sweep.
The Transmission Error (et)
When a sweep signal passes through a high pass circuit, the output gets deviated from the input as shown below.
This deviation is expressed as transmission error.
Transmission Error = $\frac{(input)\: \thicksim \:(output)}{input\: at \: the\: end\: of\: the\: sweep}$
$$e_t = \frac{V′_s − V}{V′_s}$$
Where V’s is the input and Vs is the output at the end of the sweep i.e. at t = Ts.
If the deviation from linearity is very small and the sweep voltage may be approximated by the sum of linear and quadratic terms in t, then the above three errors are related as
$$e_d = \frac{e_s}{8} = \frac{e_t}{4}$$
$$e_s = 2e_t = 8e_d$$
The sweep speed error is more dominant than the displacement error.
As we have an idea that there are two types of time base generators, let us try to know about the basic circuits of those time base generator circuits.
Voltage Time base Generator
A time base generator that provides an output voltage waveform that varies linearly with time is called as a Voltage Time base Generator.
Let us try to understand the basic voltage time base generator.
A Simple Voltage Time base Generator
A basic simple RC time base generator or a Ramp generator or a sweep circuit consists of a capacitor C which charges through VCC via a series connected resistor R2. It contains a BJT whose base is connected through the resistor R1. The capacitor charges through the resistor and discharges through the transistor.
The following figure shows a simple RC sweep circuit.

By the application of a positive going voltage pulse, the transistor Q turns ON to saturation and the capacitor rapidly discharges through Q and R1 to VCE (sat). When the input pulse ends, Q switches OFF and the capacitor C starts charging and continues to charge until the next input pulse. This process repeats as shown in the waveform below.

When the transistor turns ON it provides a low resistance path for the capacitor to discharge quickly. When the transistor is in OFF condition, the capacitor will charge exponentially to the supply voltage VCC, according to the equation
$$V_0 = V_{CC}[1 - exp(-t/RC)]$$
Where
- VO = instantaneous voltage across the capacitor at time t
- VCC = supply voltage
- t = time taken
- R = value of series resistor
- C = value of the capacitor
Let us now try to know about different types of time base generators.
The circuit just we had discussed, is a voltage time base generator circuit as it offers the output in the form of voltage.
Current Time base Generator
A time base generator that provides an output current waveform that varies linearly with time is called as a Current Time base Generator.
Let us try to understand the basic current time base generator.
Một bộ tạo cơ sở thời gian hiện tại đơn giản
Máy phát điện cơ bản thời gian RC đơn giản cơ bản hoặc máy phát điện Ramp hoặc mạch quét bao gồm một bóng bán dẫn cấu hình cơ sở chung và hai điện trở, có một trong bộ phát và một trong bộ thu. V CC được cấp cho bộ thu của bóng bán dẫn. Sơ đồ mạch của một máy phát điện đường dốc cơ bản như được hiển thị dưới đây.
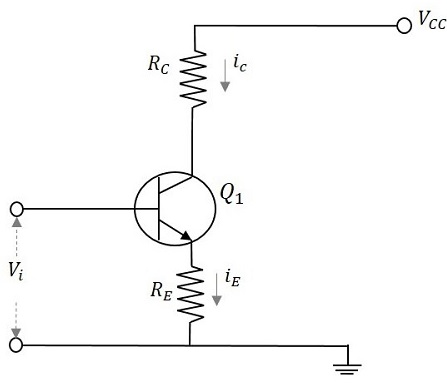
Một bóng bán dẫn được kết nối trong cấu hình cơ sở chung có dòng thu của nó thay đổi tuyến tính với dòng phát của nó. Khi dòng điện cực phát được giữ không đổi, dòng điện cực thu cũng sẽ gần giá trị không đổi, ngoại trừ các giá trị rất nhỏ của điện áp cơ bản bộ thu.
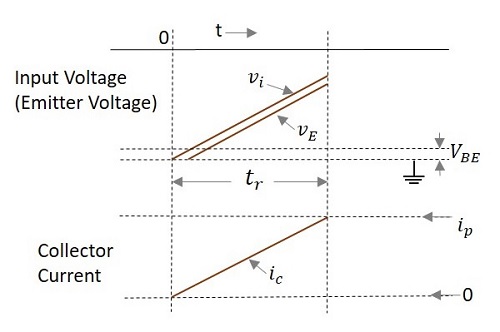
Khi điện áp đầu vào V i được đặt ở chân của bóng bán dẫn, nó xuất hiện ở bộ phát tạo ra dòng phát i E và điều này tăng tuyến tính khi V i tăng từ 0 đến giá trị đỉnh của nó. Các nhà sưu tập hiện tại tăng lên khi tăng phát thải hiện nay, bởi vì tôi C là tương đương với chặt chẽ với i E .
Giá trị tức thời của dòng tải là
$$i_L i_C \thickapprox (v_i - V_{BE})/R_E$$
Các dạng sóng đầu vào và đầu ra như hình dưới đây.
Bộ tạo quét bootstrap là một mạch tạo cơ sở thời gian có đầu ra được đưa trở lại đầu vào thông qua phản hồi. Điều này sẽ làm tăng hoặc giảm trở kháng đầu vào của mạch. Quá trình này củabootstrapping được sử dụng để đạt được dòng sạc không đổi.
Xây dựng Bộ tạo cơ sở thời gian Bootstrap
Mạch tạo cơ sở thời gian dây đeo khởi động bao gồm hai bóng bán dẫn, Q 1 hoạt động như một công tắc và Q 2 hoạt động như một bộ phát tín hiệu. Bóng bán dẫn Q 1 được kết nối bằng cách sử dụng một tụ điện đầu vào C B ở gốc của nó và một điện trở R B qua V CC . Bộ thu của bóng bán dẫn Q 1 được kết nối với đế của bóng bán dẫn Q 2 . Bộ thu của Q 2 được kết nối với V CC trong khi bộ phát của nó được cung cấp một điện trở R E để lấy đầu ra.
Một diode D được lấy có cực dương được nối với V CC trong khi cực âm được nối với tụ điện C 2 được nối với đầu ra. Cực âm của điốt D cũng được nối với điện trở R mắc lần lượt với tụ điện C 1 . C 1 và R này được kết nối thông qua cơ sở của Q 2 và bộ thu của Q 1 . Điện áp xuất hiện trên tụ C 1 cung cấp cho hiệu điện thế V o .
Hình sau giải thích cấu tạo của bộ tạo cơ sở thời gian của dây đeo khởi động.

Hoạt động của Trình tạo cơ sở thời gian Bootstrap
Trước khi áp dụng dạng sóng gating tại t = 0, khi bóng bán dẫn nhận đủ ổ đĩa cơ sở từ V CC đến R B , Q 1 là BẬT và Q 2 là TẮT. Tụ điện C 2 tích điện đến V CC qua điốt D. Sau đó, một xung kích hoạt âm từ dạng sóng gating của Bộ điều khiển đa năng đơn ổn được đặt tại chân Q 1 làm cho Q 1 TẮT. Tụ C 2 lúc này phóng điện và tụ C 1 tích điện qua điện trở R. Vì tụ C 2 có điện dung giá trị lớn nên các mức điện áp của nó (tích điện và phóng điện) biến thiên chậm hơn. Do đó, nó phóng điện chậm và duy trì một giá trị gần như không đổi trong quá trình tạo đoạn đường nối ở đầu ra Q 2 .
Trong thời gian dốc, diode D được phân cực ngược. Tụ C 2 cung cấp dòng điện nhỏ I C1 để tụ C 1 tích điện. Vì giá trị điện dung cao, mặc dù nó cung cấp dòng điện, nhưng nó không tạo ra sự khác biệt nhiều về điện tích. Khi Q 1 được BẬT vào cuối thời gian dốc, C 1 phóng điện nhanh chóng về giá trị ban đầu. Điện áp này xuất hiện trên V O . Do đó, điốt D lại được phân cực thuận và tụ điện C 2 nhận được một xung dòng điện để khôi phục điện tích nhỏ bị mất trong quá trình sạc C 1 . Bây giờ, mạch đã sẵn sàng để tạo ra một đầu ra dốc khác.
Tụ điện C2 giúp cung cấp một số dòng điện phản hồi cho tụ điện C1 hoạt động như một boot strapping capacitor cung cấp dòng điện không đổi.
Dạng sóng đầu ra
Các dạng sóng đầu ra thu được như trong hình sau.

Xung cho ở đầu vào và điện áp V C1 biểu thị sự nạp và xả của tụ điện C 1 đóng góp đầu ra được thể hiện trong hình trên.
Lợi thế
Ưu điểm chính của bộ tạo đường dốc dây đeo khởi động này là đường dốc điện áp đầu ra rất tuyến tính và biên độ đường nối đạt đến mức điện áp cung cấp.
Mạch tạo cơ sở thời gian của bóng bán dẫn Miller là mạch phổ biến Miller integratormạch tạo ra dạng sóng quét. Điều này hầu hết được sử dụng trong các mạch lệch ngang.
Chúng ta hãy thử tìm hiểu cấu tạo và hoạt động của mạch tạo cơ sở thời gian Miller.
Xây dựng máy phát điện Miller Sweep
Mạch tạo cơ sở thời gian Miller bao gồm một công tắc và một mạch định thời trong giai đoạn đầu, đầu vào của nó được lấy từ mạch tạo cổng Schmitt. Phần khuếch đại là phần sau có ba giai đoạn, đầu tiên là mộtemitter follower, thứ hai amplifier và cái thứ ba cũng là một emitter follower.
Một mạch theo dõi emitter thường hoạt động như một Buffer amplifier. Nó có mộtlow output impedance và một high input impedance. Trở kháng đầu ra thấp cho phép mạch truyền tải nặng. Trở kháng đầu vào cao giữ cho mạch không tải mạch trước của nó. Phần người theo dõi bộ phát cuối cùng sẽ không tải phần bộ khuếch đại trước đó. Bởi vì điều này, bộ khuếch đại đạt được sẽ cao.
Tụ C đặt giữa gốc Q 1 và cực phát Q 3 là tụ định thời. Giá trị R và C và sự biến thiên mức điện áp V BB làm thay đổi tốc độ quét. Hình dưới đây mô tả mạch của máy phát điện cơ bản thời gian Miller.
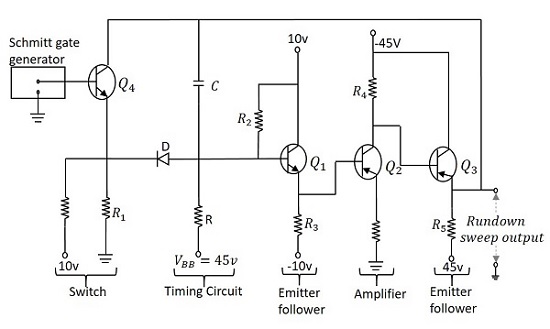
Hoạt động của Máy phát điện quét Miller
Khi đầu ra của bộ tạo kích hoạt Schmitt là một xung âm, bóng bán dẫn Q 4 BẬT và dòng điện phát chạy qua R 1 . Bộ phát ở điện thế âm và điện thế tương tự được đặt vào cực âm của diode D, làm cho nó phân cực thuận. Vì tụ điện C được bỏ qua ở đây nên nó không được sạc.
Việc áp dụng xung kích hoạt, làm cho đầu ra cổng Schmitt ở mức cao, do đó, bóng bán dẫn Q 4 TẮT. Bây giờ, một điện áp 10v được đặt vào bộ phát Q 4 làm cho dòng điện chạy qua R 1 cũng làm cho diode D bị phân cực ngược. Khi bóng bán dẫn Q 4 ở trạng thái cắt, tụ điện C được tích điện từ V BB thông qua R và cung cấp đầu ra quét dự phòng tại bộ phát Q 3 . Tụ C phóng điện qua D và bóng bán dẫn Q 4 ở cuối quá trình quét.
Xét ảnh hưởng của điện dung C 1 , tốc độ dốc hoặc sai số tốc độ quét được cho bởi
$$e_s = \frac{V_s}{V} \left( 1- A + \frac{R}{R_i} + \frac{C}{C_i} \right )$$
Các ứng dụng
Mạch quét Miller là mạch tích hợp được sử dụng phổ biến nhất trong nhiều thiết bị. Nó là một máy phát răng cưa được sử dụng rộng rãi.
Bán dẫn liên kết là một bóng bán dẫn có một điểm nối PN duy nhất, nhưng vẫn không phải là một diode. Bóng bán dẫn liên kết, hoặc đơn giảnUJTcó một cực phát và hai đế, không giống như một bóng bán dẫn bình thường. Thành phần này đặc biệt nổi tiếng với đặc tính kháng âm và cũng được ứng dụng như một bộ dao động thư giãn.
Xây dựng UJT
Một thanh silicon loại n có điện trở suất cao, được coi là hình thành cấu trúc cơ sở. Hai tiếp điểm Ohmic được vẽ ở cả hai đầu là cả hai cơ sở. Một cấu trúc giống như thanh nhôm được gắn vào nó sẽ trở thành bộ phát. Bộ phát này nằm gần cơ sở 2 và một chút xa so với cơ sở 1. Cả hai tham gia để tạo thành một điểm nối PN. Khi có đường giao nhau PN đơn, thành phần này được gọi làUnijunction transistor.
Một kháng nội bộ được gọi là intrinsic resistancehiện diện bên trong thanh có giá trị điện trở phụ thuộc vào nồng độ pha tạp của thanh. Cấu tạo và ký hiệu của UJT như hình dưới đây.

Trong biểu tượng, bộ phát được biểu thị bằng mũi tên nghiêng và hai đầu còn lại biểu thị các đế. Vì UJT được hiểu là sự kết hợp của diode và một số điện trở, cấu trúc bên trong của UJT có thể được chỉ ra bằng một sơ đồ tương đương để giải thích sự làm việc của UJT.
Hoạt động của UJT
Hoạt động của UJT có thể được hiểu bởi mạch tương đương của nó. Điện áp đặt tại bộ phát được biểu thị là V E và các điện trở bên trong được biểu thị là R B1 và R B2 tại các cơ sở 1 và 2 tương ứng. Cả hai điện trở hiện diện bên trong cùng nhau được gọi làintrinsic resistance, được chỉ định là R BB . Điện áp trên RB1 có thể được ký hiệu là V 1 . Điện áp một chiều đặt vào mạch hoạt động là V BB .
Mạch tương đương UJT như cho dưới đây.
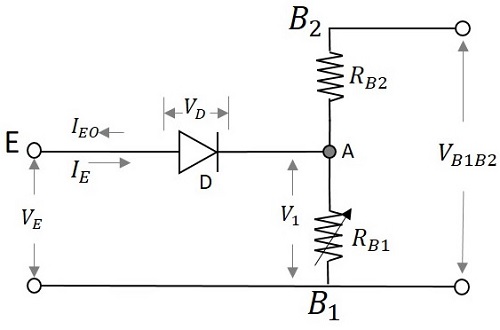
Ban đầu khi không có điện áp được đặt vào,
$$V_E = 0$$
Khi đó điện áp V BB đặt qua R B2 . Diode D sẽ phân cực ngược. Điện áp trên diode sẽ là VB, là điện áp rào cản của diode phát. Do việc áp dụng V BB , một số điện áp xuất hiện vào thời điểm A. Vì vậy, tổng điện áp sẽ là V Một + V B .
Bây giờ nếu tăng điện áp phát V E , dòng điện I E chạy qua diode D. Dòng điện này làm cho diode phân cực thuận. Các hạt tải điện bị cảm ứng và điện trở R B1 tiếp tục giảm. Do đó, điện thế trên R B1 có nghĩa là V B1 cũng giảm.
$$V_{B1} = \left( \frac{R_{B1}}{R_{B1} + R_{B2}} \right )V_{BB}$$
Khi V BB không đổi và R B1 giảm đến giá trị nhỏ nhất do nồng độ pha tạp của kênh, V B1 cũng giảm.
Trên thực tế, các điện trở hiện diện bên trong được gọi là intrinsic resistance, được chỉ định là R BB . Điện trở được đề cập ở trên có thể được chỉ ra là
$$R_{BB} = R_{B1} + R_{B2}$$
$$\left( \frac{R_{B1}}{R_{BB}} \right ) = \eta$$
Ký hiệu η được sử dụng để biểu thị tổng trở lực được áp dụng.
Do đó điện áp trên V B1 được biểu thị là
$$V_{B1} = \eta V_{BB}$$
Điện áp phát được cho là
$$V_E = V_D + V_{B1}$$
$$V_E = 0.7 + V_{B1}$$
Trong đó V D là điện áp trên diode.
Khi diode được phân cực thuận, điện áp trên nó sẽ là 0,7v. Vì vậy, điều này là không đổi và V B1 tiếp tục giảm. Do đó V E tiếp tục giảm. Nó giảm đến một giá trị nhỏ nhất có thể được ký hiệu là V V được gọi làValley voltage. Điện áp tại đó UJT được BẬT làPeak Voltageký hiệu là V P .
VI Đặc điểm của UJT
Khái niệm được thảo luận cho đến bây giờ được hiểu rõ ràng từ biểu đồ sau được hiển thị bên dưới.
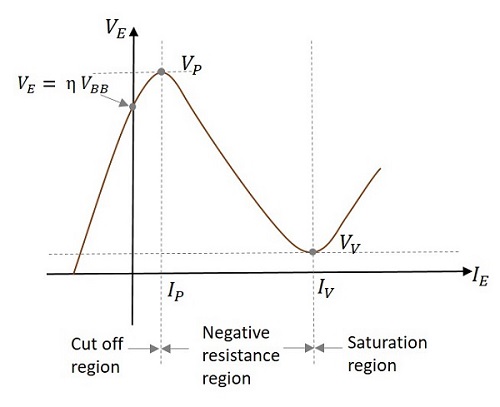
Ban đầu khi V E bằng 0, một số dòng điện ngược IE chạy cho đến khi, giá trị của VE đạt đến điểm mà tại đó
$$V_E = \eta V_{BB}$$
Đây là điểm mà đường cong tiếp xúc với trục Y.
Khi V E đạt đến hiệu điện thế ở đâu
$$V_E = \eta V_{BB} + V_D$$
Tại thời điểm này, diode được phân cực thuận.
Điện áp tại điểm này được gọi là V P (Peak Voltage) và dòng điện tại thời điểm này được gọi là I P (Peak Current). Phần trong biểu đồ cho đến bây giờ, được gọi làCut off region vì UJT ở trạng thái TẮT.
Bây giờ, khi tăng thêm V E thì điện trở R B1 và điện áp V 1 cũng giảm nhưng cường độ dòng điện qua nó tăng. Đây làNegative resistance property và do đó vùng này được gọi là Negative resistance region.
Bây giờ, điện áp V E đạt đến một điểm nhất định mà sự tăng thêm nữa dẫn đến sự gia tăng điện áp trên R B1 . Điện áp tại điểm này được gọi là V V (Valley Voltage) và dòng điện tại thời điểm này được gọi là I V (Valley Current). Khu vực sau này được gọi làSaturation region.
Các ứng dụng của UJT
UJT được sử dụng phổ biến nhất làm dao động thư giãn. Chúng cũng được sử dụng trong Mạch điều khiển pha. Ngoài ra, UJT được sử dụng rộng rãi để cung cấp xung nhịp cho các mạch kỹ thuật số, điều khiển thời gian cho các thiết bị khác nhau, kích hoạt điều khiển trong thyristor và đồng bộ xung cho các mạch lệch ngang trong CRO.
An oscillatorlà thiết bị tự tạo ra dạng sóng mà không cần bất kỳ đầu vào nào. Mặc dù một số điện áp một chiều được áp dụng để thiết bị hoạt động, nó sẽ không tạo ra bất kỳ dạng sóng nào làm đầu vào. Dao động thư giãn là một thiết bị tạo ranon-sinusoidal waveformcủa riêng nó. Dạng sóng này thường phụ thuộc vào hằng số thời gian sạc và xả của tụ điện trong mạch.
Xây dựng và làm việc
Bộ phát UJT được nối với một điện trở và tụ điện như hình vẽ. Hằng số thời gian RC xác định thời gian của dạng sóng đầu ra của bộ dao động thư giãn. Cả hai đế đều được kết nối với một điện trở. Nguồn cung cấp điện áp một chiều V BB đã cho.
Hình sau đây cho thấy cách sử dụng UJT như một dao động điều hòa.

Ban đầu, hiệu điện thế trên tụ bằng không.
$$V_c = 0$$
UJT ở trạng thái TẮT. Điện trởR cung cấp một đường dẫn cho tụ điện C để tích điện qua hiệu điện thế đặt vào.
Tụ điện tích điện theo hiệu điện thế
$$V = V_0(1 - e^{-t/RC})$$
Tụ điện thường bắt đầu sạc và tiếp tục sạc cho đến khi điện áp lớn nhất V BB . Nhưng trong mạch này, khi điện áp trên tụ điện đạt đến một giá trị cho phép UJT BẬT (điện áp đỉnh) thì tụ điện ngừng sạc và bắt đầu phóng điện qua UJT. Bây giờ, quá trình phóng điện này tiếp tục cho đến khi điện áp tối thiểu biến UJT TẮT (điện áp thung lũng). Quá trình này tiếp tục và điện áp trên tụ điện, khi được chỉ ra trên đồ thị, sẽ quan sát được dạng sóng sau đây.

Vì vậy, sự tích điện và phóng điện của tụ điện tạo ra dạng sóng quét như hình trên. Thời gian sạc tạo ra quét tăng và thời gian xả tạo ra quét giảm. Sự lặp lại của chu kỳ này, tạo thành một dạng sóng đầu ra quét liên tục.
Vì đầu ra là dạng sóng không hình sin, mạch này được cho là hoạt động như một bộ dao động thư giãn.
Các ứng dụng của Bộ dao động thư giãn
Bộ tạo dao động thư giãn được sử dụng rộng rãi trong máy phát chức năng, máy bíp điện tử, SMPS, bộ biến tần, bộ nhấp nháy và bộ tạo dao động điều khiển bằng điện áp.
Trong bất kỳ hệ thống nào, có các máy phát dạng sóng khác nhau, tất cả chúng đều được yêu cầu hoạt động đồng bộ. Đồng bộ hóa là quá trình làm cho hai hoặc nhiều bộ tạo dạng sóng đến một điểm tham chiếu nào đó trong chu kỳ chính xác cùng một lúc.
Các loại đồng bộ hóa
Đồng bộ hóa có thể thuộc hai loại sau:
Cơ sở một-một
Tất cả các máy phát điện đều hoạt động ở cùng một tần số.
Tất cả chúng đều đến một điểm chuẩn nào đó trong chu kỳ chính xác vào cùng một thời điểm.
Đồng bộ với phân chia tần số
Máy phát điện hoạt động ở tần số khác nhau là bội số của nhau.
Tất cả chúng đều đến một điểm chuẩn nào đó trong chu kỳ chính xác vào cùng một thời điểm.
Thiết bị thư giãn
Mạch thư giãn là mạch trong đó khoảng thời gian được thiết lập thông qua quá trình sạc dần của tụ điện, khoảng thời gian được kết thúc bằng sự phóng điện đột ngột (giãn) của tụ điện.
Examples - Multivibrator, mạch quét, bộ dao động chặn, v.v.
Chúng ta đã quan sát thấy trong mạch dao động thư giãn UJT rằng tụ điện ngừng nạp khi thiết bị có điện trở âm như UJT BẬT. Sau đó tụ điện phóng điện qua nó để đạt giá trị nhỏ nhất. Cả hai điểm này biểu thị điểm điện áp tối đa và tối thiểu của dạng sóng quét.
Đồng bộ hóa trong Thiết bị Thư giãn
Nếu điện áp cao hoặc điện áp đỉnh hoặc điện áp đánh thủng của dạng sóng quét phải được đưa xuống mức thấp hơn, thì tín hiệu bên ngoài có thể được áp dụng. Tín hiệu được áp dụng này là tín hiệu đồng bộ có tác dụng làm giảm điện áp đỉnh hoặc điện áp đánh thủng, trong suốt thời gian của xung. Một xung đồng bộ hóa thường được áp dụng tại bộ phát hoặc ở chân của thiết bị kháng âm. Một hệ thống xung có các xung cách đều nhau được áp dụng để đạt được sự đồng bộ hóa.
Mặc dù các tín hiệu đồng bộ hóa được áp dụng vài xung đầu tiên sẽ không có hiệu lực trên các máy phát điện quét như biên độ của tín hiệu quét ở sự xuất hiện của các xung, ngoài với biên độ của xung là ít hơn V P . Do đó máy phát quét chạy không đồng bộ. Thời điểm chính xác mà UJT BẬT được xác định bằng thời gian xuất hiện xung. Đây là điểm mà tín hiệu đồng bộ đạt được sự đồng bộ với tín hiệu quét. Điều này có thể được quan sát từ hình sau.

Ở đâu,
- T P là khoảng thời gian của tín hiệu xung
- T O là khoảng thời gian của tín hiệu quét
- V P là điện áp đỉnh hoặc điện áp đánh thủng
- V V là điện áp Thung lũng hoặc Duy trì
Để đạt được đồng bộ hóa, khoảng thời gian xung TP phải nhỏ hơn khoảng thời gian của máy phát quét TO, để nó kết thúc sớm chu kỳ quét. Không thể đạt được đồng bộ hóa nếu khoảng thời gian xungTPlớn hơn khoảng thời gian của máy phát điện quét T O và cũng như nếu biên độ của các xung không đủ lớn để thu hẹp khoảng cách giữa đánh thủng yên tĩnh và điện áp quét, mặc dù T P nhỏ hơnTO.
Phân chia tần số trong mạch quét
Trong chủ đề trước, chúng ta đã quan sát thấy rằng sự đồng bộ hóa đạt được khi các điều kiện sau được thỏa mãn. họ đang
Khi T P <T O
Khi biên độ của xung đủ để kết thúc sớm mỗi chu kỳ.
Thỏa mãn hai điều kiện này, mặc dù đã đạt được đồng bộ hóa, chúng ta thường có thể bắt gặp một mô hình thú vị nhất định trong quá trình quét liên quan đến thời gian đồng bộ hóa. Hình sau minh họa điểm này.

Chúng ta có thể quan sát rằng V biên độ' S của quét sau khi đồng bộ hóa là ít hơn so với biên độ không đồng bộ V S . Ngoài ra, khoảng thời gian T O của quá trình quét được điều chỉnh theo khoảng thời gian của xung nhưng để lại một chu kỳ ở giữa. Có nghĩa là, một chu kỳ quét được thực hiện bằng hai chu kỳ xung. Đồng bộ hóa đạt được cho mỗi chu kỳ thay thế, trong đó
$$T_o > 2T_P$$
Thời gian quét T O được giới hạn T S và biên độ của nó giảm xuống V' S .
Khi mỗi xung thứ hai được tạo ra đồng bộ với chu kỳ quét, tín hiệu này có thể được hiểu là một mạch biểu thị sự phân chia tần số theo hệ số 2. Do đó, mạch phân tần có được bằng cách đồng bộ hóa.
Một bộ dao động là một mạch cung cấp một alternating voltage hoặc là current by its own, mà không áp dụng bất kỳ đầu vào nào. Một Oscillator cần mộtamplifier và cũng là một feedbacktừ đầu ra. Phản hồi được cung cấp phải là phản hồi tái tạo cùng với phần của tín hiệu đầu ra, chứa một thành phần trong tín hiệu đầu ra, cùng pha với tín hiệu đầu vào. Một bộ tạo dao động sử dụng phản hồi tái tạo để tạo ra đầu ra không phải dạng lồi được gọi làRelaxation Oscillator.
Chúng ta đã thấy bộ dao động thư giãn UJT. Một loại dao động thư giãn khác là dao động chặn.
Bộ tạo dao động chặn
Bộ tạo dao động chặn là bộ tạo dạng sóng được sử dụng để tạo ra các xung hẹp hoặc xung kích hoạt. Trong khi có phản hồi từ tín hiệu đầu ra, nó sẽ chặn phản hồi, sau một chu kỳ, trong một thời gian xác định trước. Tính năng này củablocking the output trong khi được an oscillator, lấy bộ dao động chặn tên cho nó.
Trong cấu tạo của một bộ dao động chặn, bóng bán dẫn được sử dụng như một bộ khuếch đại và máy biến áp được sử dụng để phản hồi. Máy biến áp được sử dụng ở đây là mộtPulse transformer. Ký hiệu của máy biến áp xung như hình bên dưới.
Biến áp xung
Máy biến áp xung là một máy biến áp ghép một nguồn năng lượng điện hình chữ nhật với tải. Giữ nguyên hình dạng và các đặc tính khác của xung. Họ là máy biến áp dải rộng vớiminimum attenuation và không hoặc tối thiểu phase change.
Đầu ra của máy biến áp phụ thuộc vào điện tích và phóng điện của tụ điện được kết nối.
Phản hồi tái tạo được thực hiện dễ dàng bằng cách sử dụng biến áp xung. Đầu ra có thể được đưa trở lại đầu vào trong cùng một pha bằng cách chọn đúng các cực của cuộn dây của máy biến áp xung. Bộ tạo dao động chặn là một bộ dao động chạy tự do được tạo ra bằng cách sử dụng một tụ điện và một máy biến áp xung cùng với một bóng bán dẫn duy nhất bị cắt trong phần lớn chu kỳ làm việc tạo ra các xung tuần hoàn.
Sử dụng bộ dao động chặn, có thể thực hiện các hoạt động Astable và Monostable. Nhưng hoạt động Bistable là không thể. Hãy để chúng tôi đi qua chúng.
Bộ tạo dao động chặn đơn nhất
Nếu bộ dao động chặn cần một xung đơn, để thay đổi trạng thái của nó, nó được gọi là mạch dao động chặn đơn ổn. Các bộ dao động chặn Monostable này có thể có hai loại. họ đang
- Bộ dao động chặn đơn nhất với thời gian cơ sở
- Bộ dao động chặn đơn nhất với thời gian phát
Trong cả hai điều này, một điện trở định thời R điều khiển độ rộng cổng, khi được đặt trong đế của bóng bán dẫn trở thành mạch định thời cơ sở và khi được đặt trong bộ phát của bóng bán dẫn trở thành mạch định thời phát.
Để hiểu rõ hơn, chúng ta hãy thảo luận về hoạt động của Bộ đa vi mạch đơn nhất định thời gian cơ sở.
Transistor được kích hoạt Bộ dao động chặn đơn ổn với thời gian cơ sở
Một bóng bán dẫn, một biến áp xung để phản hồi và một điện trở trong đế của bóng bán dẫn tạo thành mạch của một bóng bán dẫn được kích hoạt Bộ dao động chặn Monostable với thời gian cơ sở. Máy biến áp xung được sử dụng ở đây có tỷ lệ vòng dây làn: 1 nơi mạch cơ sở có nlượt cho mỗi lượt trên mạch thu. Điện trở R được mắc nối tiếp với đế của bóng bán dẫn điều khiển thời gian xung.
Ban đầu bóng bán dẫn ở trạng thái TẮT. Như trong hình dưới đây, VBB được coi là 0 hoặc quá thấp, không đáng kể.
Điện áp tại bộ thu là V CC , vì thiết bị đang TẮT. Nhưng khi một kích hoạt âm được áp dụng tại bộ thu, điện áp sẽ giảm. Do các cực của cuộn dây của máy biến áp, điện áp bộ góp giảm xuống, trong khi điện áp cơ bản tăng lên.
Khi điện áp cơ bản đến máy phát trở nên lớn hơn điện áp cắt, tức là
$$V_{BE} > V_\gamma$$
Sau đó, một dòng điện cơ bản nhỏ được quan sát. Điều này làm tăng dòng điện của bộ thu và làm giảm điện áp bộ thu. Hành động này tích lũy thêm, làm tăng dòng điện của bộ thu và giảm điện áp bộ thu hơn nữa. Với hành động phản hồi tái tạo, nếu độ lợi vòng lặp tăng lên, bóng bán dẫn sẽ nhanh chóng bão hòa. Nhưng đây không phải là trạng thái ổn định.
Sau đó, một dòng điện cơ bản nhỏ được quan sát. Điều này làm tăng dòng điện của bộ thu và làm giảm điện áp bộ thu. Hành động này tích lũy thêm, làm tăng dòng điện của bộ thu và giảm điện áp bộ thu hơn nữa. Với hành động phản hồi tái tạo, nếu độ lợi vòng lặp tăng lên, bóng bán dẫn sẽ nhanh chóng bão hòa. Nhưng đây không phải là trạng thái ổn định.
Khi bóng bán dẫn đi vào trạng thái bão hòa, dòng thu tăng và dòng cơ bản không đổi. Bây giờ, dòng điện từ từ bắt đầu sạc tụ điện và điện áp tại máy biến áp giảm. Do các cực của cuộn dây biến áp, điện áp cơ bản tăng lên. Điều này lại làm giảm dòng điện cơ bản. Hành động tích lũy này, ném bóng bán dẫn vào tình trạng cắt, đó là trạng thái ổn định của mạch.
Các output waveforms như sau -

Chính disadvantagecủa mạch này là độ rộng xung đầu ra không thể được duy trì ổn định. Chúng tôi biết rằng dòng thu là
$$i_c = h_{FE}i_B$$
Vì h FE phụ thuộc vào nhiệt độ và độ rộng xung thay đổi tuyến tính với điều này, độ rộng xung đầu ra không thể ổn định. Ngoài ra h FE thay đổi theo bóng bán dẫn được sử dụng.
Dù sao, nhược điểm này có thể được loại bỏ nếu điện trở được đặt trong bộ phát, có nghĩa là giải pháp là emitter timing circuit. Khi điều kiện trên xảy ra, bóng bán dẫn TẮT trong mạch định thời phát và do đó thu được một đầu ra ổn định.
Bộ tạo dao động chặn linh hoạt
Nếu bộ dao động chặn có thể thay đổi trạng thái tự động, nó được gọi là mạch dao động chặn Astable. Các bộ dao động chặn Astable này có thể có hai loại. họ đang
- Bộ dao động chặn Astable được điều khiển bằng diode
- Bộ dao động chặn Astable điều khiển RC
Trong bộ dao động chặn Astable được điều khiển bằng diode, một diode đặt trong bộ thu sẽ thay đổi trạng thái của bộ dao động chặn. Trong khi ở trong bộ dao động chặn Astable được điều khiển RC, một điện trở định thời R và tụ điện C tạo thành một mạng lưới trong phần bộ phát để điều khiển thời gian xung.
Để hiểu rõ hơn, chúng ta hãy thảo luận về hoạt động của bộ dao động chặn Astable được điều khiển bằng Diode.
Bộ dao động chặn Astable được điều khiển bằng diode
Bộ dao động chặn Astable được điều khiển bằng diode chứa một biến áp xung trong mạch thu. Một tụ điện được kết nối giữa thứ cấp của máy biến áp và đế của bóng bán dẫn. Máy biến áp sơ cấp và điốt được kết nối trong bộ thu.
An initial pulse được đưa ra tại bộ thu của bóng bán dẫn để bắt đầu quá trình và từ đó no pulses are requiredvà mạch hoạt động như một Bộ điều khiển đa năng linh hoạt. Hình dưới đây cho thấy mạch của một bộ dao động chặn Astable được điều khiển bằng diode.

Ban đầu bóng bán dẫn ở trạng thái TẮT. Để bắt đầu mạch, một xung kích hoạt âm được áp dụng tại bộ thu. Diode có cực dương được kết nối với bộ thu, sẽ ở trạng thái phân cực ngược và sẽ TẮT khi áp dụng xung kích hoạt âm này.
Xung này được áp dụng cho máy biến áp xung và do các cực của cuộn dây (như được chỉ ra trong hình), cùng một lượng điện áp được tạo ra mà không có bất kỳ sự đảo pha nào. Điện áp này chạy qua tụ điện về phía đế, đóng góp một số dòng điện cơ bản. Dòng điện cơ bản này phát triển một số điện áp cơ bản đến điện áp phát, khi vượt qua điện áp cắt, đẩy bóng bán dẫn Q 1 sang BẬT. Bây giờ, dòng điện góp của bóng bán dẫn Q 1 tăng lên và nó được áp dụng cho cả diode và máy biến áp. Diode ban đầu TẮT sẽ BẬT bây giờ. Điện áp được cảm ứng vào cuộn sơ cấp của máy biến áp tạo ra một số điện áp vào cuộn thứ cấp của máy biến áp, sử dụng tụ điện này để bắt đầu sạc.
Vì tụ điện sẽ không cung cấp bất kỳ dòng điện nào khi nó đang được sạc, nên dòng điện cơ bản i B ngừng chạy. Điều này làm cho bóng bán dẫn Q 1 TẮT. Do đó trạng thái bị thay đổi.
Bây giờ, điốt đã BẬT, có một số điện áp trên nó, được áp dụng cho sơ cấp của máy biến áp, được cảm ứng vào thứ cấp. Bây giờ, dòng điện chạy qua tụ điện làm cho tụ điện phóng điện. Do đó, dòng điện cơ sở i B chạy làm BẬT bóng bán dẫn một lần nữa. Các dạng sóng đầu ra như hình dưới đây.

Khi diode giúp bóng bán dẫn thay đổi trạng thái của nó, mạch này được điều khiển bằng diode. Ngoài ra, vì xung kích hoạt chỉ được áp dụng tại thời điểm bắt đầu, trong khi mạch liên tục thay đổi trạng thái của chính nó, mạch này là một bộ dao động Astable. Do đó tên bộ dao động chặn Astable được điều khiển bằng diode được đưa ra.
Một loại mạch khác sử dụng kết hợp R và C trong phần phát của bóng bán dẫn và nó được gọi là mạch dao động chặn Astable điều khiển RC.
Đến bây giờ, chúng ta đã bắt gặp các mạch Xung khác nhau. Đôi khi, chúng ta cần phải hạn chế việc áp dụng các đầu vào xung như vậy trong những khoảng thời gian nhất định. Mạch giúp chúng tôi trong khía cạnh này làSampling gate circuit. Chúng còn được gọi làlinear gates hoặc là transmission gates hoặc là selection circuits.
Các cổng lấy mẫu này giúp lựa chọn tín hiệu truyền trong một khoảng thời gian nhất định, tín hiệu đầu ra giống với tín hiệu đầu vào hoặc bằng không. Khoảng thời gian đó được chọn bằng cách sử dụngcontrol signal hoặc là selection signal.
Cổng lấy mẫu
Đối với cổng Lấy mẫu, tín hiệu đầu ra phải giống với đầu vào hoặc tỷ lệ với tín hiệu đầu vào trong khoảng thời gian đã chọn và nếu không thì phải bằng 0. Khoảng thời gian đã chọn đó được gọi làTransmission Period và khoảng thời gian khác được gọi là Non-transmission Period. Điều này được chọn bằng cách sử dụngcontrol signalchỉ định bởi V C . Hình sau giải thích điểm này.

Khi tín hiệu điều khiển V C ở V 1 , cổng lấy mẫu đóng và khi V C ở V 2 , nó mở. Độ rộng xung T g cho biết khoảng thời gian mà xung cổng được áp dụng.
Các loại cổng lấy mẫu
Các loại cổng Lấy mẫu bao gồm:
Unidirectional sampling sgates- Các cổng lấy mẫu loại này có thể truyền xung đi qua dương hoặc âm qua chúng. Chúng được xây dựng bằng cách sử dụng điốt.
Bidirectional sampling gate- Các cổng lấy mẫu loại này có thể cho cả xung dương và xung đi qua chúng. Chúng được xây dựng bằng cách sử dụng điốt hoặc BJT.
Các loại công tắc được sử dụng
Các cổng lấy mẫu có thể được xây dựng bằng cách sử dụng công tắc nối tiếp hoặc công tắc ngắt. Khoảng thời gian mà công tắc phải mở hoặc đóng được xác định bởi tín hiệu xung gating. Các công tắc này được thay thế bằng các phần tử tích cực như điốt và bóng bán dẫn.
Hình dưới đây cho thấy sơ đồ khối của các cổng lấy mẫu sử dụng công tắc nối tiếp và chuyển mạch shunt.

Cổng lấy mẫu sử dụng công tắc nối tiếp
Trong loại công tắc này, nếu công tắc S đóng, đầu ra sẽ chính xác bằng hoặc tỷ lệ với đầu vào. Khoảng thời gian đó sẽ làTransmission Period.
Nếu công tắc S mở, đầu ra sẽ là 0 hoặc tín hiệu mặt đất. Khoảng thời gian đó sẽ làNon-transmission Period.
Cổng lấy mẫu sử dụng công tắc Shunt
Trong loại công tắc này, nếu công tắc S đóng, đầu ra sẽ bằng không hoặc tín hiệu mặt đất. Khoảng thời gian đó sẽ làNon-transmission Period.
Nếu công tắc S mở, đầu ra sẽ chính xác bằng hoặc tỷ lệ với đầu vào. Khoảng thời gian đó sẽ làTransmission Period.
Các cổng lấy mẫu hoàn toàn khác với các cổng logic của mạch kỹ thuật số. Chúng cũng được biểu diễn bằng các xung hoặc mức điện áp. Nhưng chúng là cổng kỹ thuật số và đầu ra của chúng không phải là bản sao chính xác của đầu vào. Trong khi các mạch cổng lấy mẫu là các cổng tương tự có đầu ra là bản sao chính xác của đầu vào.
Trong các chương tới, chúng ta sẽ thảo luận về các loại cổng lấy mẫu.
Sau khi đi qua khái niệm về cổng lấy mẫu, bây giờ chúng ta hãy thử tìm hiểu các loại cổng lấy mẫu. Cổng lấy mẫu một chiều có thể truyền xung đi qua dương hoặc âm qua chúng. Chúng được xây dựng bằng cách sử dụng điốt.
Một mạch cổng lấy mẫu một chiều gồm một tụ điện C, một diode D và hai điện trở R 1 và R L . Đầu vào tín hiệu được đưa cho tụ điện và đầu vào điều khiển được đưa cho điện trở R 1 . Đầu ra là lấy trên tải điện trở R L . Mạch như hình dưới đây.

Theo hoạt động của một diode, nó chỉ dẫn điện khi cực dương của diode có giá trị dương hơn cực âm của diode. Nếu diode có tín hiệu tích cực ở đầu vào của nó, nó sẽ dẫn. Khoảng thời gian mà tín hiệu cổng BẬT, là khoảng thời gian truyền. Do đó, trong khoảng thời gian đó tín hiệu đầu vào được truyền đi. Nếu không thì không thể truyền được.
Hình dưới đây cho thấy các khoảng thời gian của tín hiệu đầu vào và tín hiệu cổng.

Tín hiệu đầu vào chỉ được truyền trong khoảng thời gian mà cổng BẬT như trong hình.
Từ mạch chúng tôi có,
Cực dương của diode được áp dụng với hai tín hiệu (V S và V C ). Nếu điện áp ở cực dương là V P và điện áp ở cực âm là V N thì điện áp đầu ra thu được là
$$V_o = V_P = (V_S + V_C) > V_N$$
Vì vậy diode ở trạng thái phân cực thuận.
$$V_O = V_S + V_1 > V_N$$
Sau đó
$$V_O = V_S$$
Khi V 1 = 0,
Sau đó
$$V_O = V_S + V_1 \: Which \: means \: V_O = V_S$$
Giá trị lý tưởng của V 1 = 0.
Vì vậy, nếu V 1 = 0, toàn bộ tín hiệu đầu vào xuất hiện ở đầu ra. Nếu giá trị của V 1 là âm, thì một số đầu vào bị mất và nếu V 1 là dương, tín hiệu bổ sung cùng với đầu vào sẽ xuất hiện ở đầu ra.
Toàn bộ điều này xảy ra trong thời gian truyền.
Trong thời gian không truyền,
$$V_O = 0$$
Khi diode ở trong điều kiện phân cực ngược
Khi điện áp trên anốt nhỏ hơn điện áp trên catốt,
$$V_S + V_C < 0 \: Volts$$
Trong thời gian không truyền,
$$V_C = V_2$$
$$V_S + V_2 < 0$$
Độ lớn của V 2 nên V s rất lớn .
$$|V_2| ≫ V_S$$
Bởi vì đối với diode phân cực ngược, tổng của điện áp V S và V C phải là âm. V C ( bây giờ là V 2 ) càng âm càng tốt để mặc dù V S là dương, nhưng tổng của cả hai điện áp sẽ cho kết quả âm.
Các trường hợp đặc biệt
Bây giờ, chúng ta hãy xem một vài trường hợp cho các giá trị khác nhau của điện áp đầu vào trong đó điện áp điều khiển có giá trị âm nào đó.
Trường hợp 1
Hãy lấy một ví dụ trong đó V S = 10V và V C = -10v (V 1 ) đến -20v (V 2 )
Bây giờ, khi hai tín hiệu này được áp dụng, (V S và V C ) thì điện áp ở cực dương sẽ là
$$V_P = V_S + V_C$$
Vì đây là khoảng thời gian truyền, chỉ có V 1 được xem xét cho V C .
$$V_O = (10V) + (-10V) = 0V$$
Do đó, đầu ra sẽ bằng 0, mặc dù một số lượng điện áp đầu vào đang được áp dụng. Hình sau đây giải thích điểm này.

Trường hợp 2
Chúng ta hãy lấy một ví dụ trong đó V S = 10V và V C = -5v (V 1 ) đến -20v (V 2 )
Bây giờ, khi hai tín hiệu này được áp dụng, (V S và V C ) thì điện áp ở cực dương sẽ là
$$V_P = V_S + V_C$$
Vì đây là khoảng thời gian truyền, chỉ có V 1 được xem xét cho V C .
$$V_O = (10V) + (-5V) = 5V$$
Do đó đầu ra sẽ là 5 V. Hình sau giải thích điểm này.

Trường hợp 3
Chúng ta hãy lấy một ví dụ trong đó V S = 10V và V C = 0v (V 1 ) đến -20v (V 2 )
Bây giờ, khi hai tín hiệu này được áp dụng, (V S và V C ) thì điện áp ở cực dương sẽ là
$$V_P = V_S + V_C$$
Vì đây là khoảng thời gian truyền, chỉ có V 1 được xem xét cho V C .
$$V_O = (10V) + (0V) = 10V$$
Do đó đầu ra sẽ là 10 V. Hình sau giải thích điểm này.

Trường hợp 4
Chúng ta hãy lấy một ví dụ trong đó V S = 10V và V C = 5v (V 1 ) đến -20v (V 2 )
Bây giờ, khi hai tín hiệu này được áp dụng, (V S và V C ) thì điện áp ở cực dương sẽ là
$$V_P = V_S + V_C$$
Vì đây là khoảng thời gian truyền, chỉ có V 1 được xem xét cho V C .
$$V_O = (10V) + (5V) = 15V$$
Do đó đầu ra sẽ là 15 V.
Điện áp đầu ra bị ảnh hưởng bởi điện áp điều khiển được áp dụng. Điện áp này cộng vào đầu vào để tạo ra đầu ra. Do đó nó ảnh hưởng đến đầu ra.
Hình sau đây cho thấy sự chồng chất của cả hai tín hiệu.

Chúng ta có thể quan sát thấy rằng trong thời gian chỉ áp dụng điện áp cổng, đầu ra sẽ là 5v. Khi cả các tín hiệu được áp dụng, V P xuất hiện như V O . Trong thời gian không truyền, đầu ra là 0v.
Như quan sát từ hình trên, sự khác biệt về tín hiệu đầu ra trong thời kỳ truyền và thời kỳ không truyền, mặc dù (với V S = 0) tín hiệu đầu vào không được áp dụng, được gọi làPedestal. Bệ này có thể là dương hoặc âm. Trong ví dụ này, chúng tôi nhận được một bệ đỡ tích cực trong đầu ra.
Ảnh hưởng của RC đến điện áp điều khiển
Nếu tín hiệu đầu vào được áp dụng trước khi điện áp điều khiển đạt đến trạng thái ổn định, sẽ xảy ra một số biến dạng ở đầu ra.
Chúng tôi chỉ nhận được đầu ra chính xác khi tín hiệu đầu vào được đưa ra khi tín hiệu điều khiển là 0v. 0v này là giá trị ổn định. Nếu tín hiệu đầu vào được đưa ra trước đó, sự biến dạng sẽ xảy ra.

Điện áp điều khiển tại A tăng chậm là do có mặt mạch RC. Hằng số thời gian là kết quả của RC ảnh hưởng đến hình dạng của dạng sóng này.
Ưu và nhược điểm của Cổng lấy mẫu một chiều
Hãy cùng chúng tôi xem xét những ưu điểm và nhược điểm của cổng lấy mẫu một chiều.
Ưu điểm
Mạch rất đơn giản.
Thời gian trễ giữa đầu vào và đầu ra quá thấp.
Nó có thể được mở rộng cho nhiều đầu vào hơn.
Không có dòng điện nào được rút ra trong thời gian không truyền tải. Do đó, trong điều kiện yên tĩnh, không có sự tiêu tán điện năng.
Nhược điểm
Có sự tương tác giữa điều khiển và tín hiệu đầu vào (V C và V S )
Khi số lượng đầu vào tăng lên, tải trên đầu vào điều khiển tăng lên.
Đầu ra nhạy cảm với điều khiển điện áp đầu vào V 1 (mức trên của V C )
Chỉ một đầu vào nên được áp dụng ngay lập tức.
Do thời gian tăng chậm của tín hiệu điều khiển, đầu ra có thể bị méo, nếu tín hiệu đầu vào được áp dụng trước khi đạt đến trạng thái ổn định.
Các mạch cổng lấy mẫu đơn hướng mà chúng ta đã thảo luận cho đến nay có một đầu vào duy nhất. Trong chương này, chúng ta hãy thảo luận thêm một vài mạch cổng lấy mẫu đơn hướng có thể xử lý nhiều hơn một tín hiệu đầu vào.
Mạch cổng lấy mẫu một chiều bao gồm các tụ điện và điện trở có cùng giá trị. Ở đây, hai cổng lấy mẫu diode một chiều đầu vào với hai đầu vào được xem xét. Trong đoạn mạch này ta có hai tụ điện và hai điện trở cùng giá trị. Chúng được kết nối với hai điốt mỗi.
Tín hiệu điều khiển được áp dụng tại các điện trở. Đầu ra được đưa qua điện trở tải. Hình dưới đây cho thấy sơ đồ mạch cho cổng lấy mẫu diode một chiều với nhiều hơn một tín hiệu đầu vào.
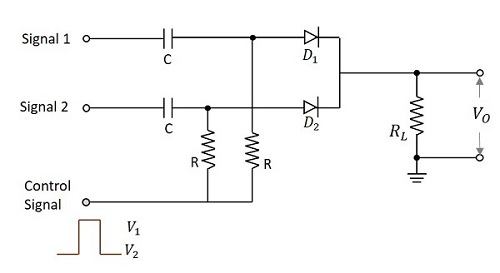
Khi đầu vào điều khiển được đưa ra,
Tại V C = V 1 trong thời gian truyền sóng, cả điốt D 1 và D 2 đều phân cực thuận. Bây giờ, đầu ra sẽ là tổng của cả ba đầu vào.
$$V_O = V_{S1} + V_{S2} + V_C$$
Với V 1 = 0v là giá trị lý tưởng,
$$V_O = V_{S1} + V_{S2}$$
Ở đây chúng tôi có một hạn chế lớn là tại bất kỳ thời điểm nào, trong suốt thời gian truyền, chỉ nên áp dụng một đầu vào. Đây là một nhược điểm của mạch này.
Trong thời gian không truyền,
$$V_C = V_2$$
Cả hai điốt sẽ bị phân cực ngược có nghĩa là bị hở mạch.
Điều này làm cho đầu ra
$$V_O = 0V$$
Nhược điểm chính của mạch này là loading of the circuittăng khi số lượng đầu vào tăng lên. Hạn chế này có thể tránh được bằng một mạch khác trong đó đầu vào điều khiển được đưa ra sau điốt tín hiệu đầu vào.
Giảm bệ
Trong khi đi qua các loại cổng lấy mẫu khác nhau và đầu ra mà chúng tạo ra, chúng tôi đã bắt gặp một mức điện áp bổ sung trong các dạng sóng đầu ra được gọi là Pedestal. Điều này là không mong muốn và tạo ra một số tiếng ồn.
Giảm bệ trong mạch Cổng
Sự khác biệt về tín hiệu đầu ra trong thời gian truyền và thời gian không truyền mặc dù tín hiệu đầu vào không được áp dụng, được gọi là Pedestal. Nó có thể là một bệ tích cực hoặc một bệ tiêu cực.
Do đó nó là đầu ra được quan sát vì điện áp gating mặc dù tín hiệu đầu vào không có. Điều này là không mong muốn và phải được giảm bớt. Mạch bên dưới được thiết kế để giảm bệ trong mạch cổng.

Khi tín hiệu điều khiển được đưa vào, trong khoảng thời gian truyền tức là tại V 1 , Q 1 BẬT và Q 2 TẮT và V CC được đưa qua R C đến Q 1 . Trong khi trong khoảng thời gian không truyền, tức là tại V 2 , Q 2 BẬT và Q 1 TẮT và V CC được đưa qua R C đến Q 2 . Các điện áp cơ bản –V BB1 và –V BB2 và biên độ của tín hiệu cổng được điều chỉnh để hai dòng điện bán dẫn giống hệt nhau và kết quả là mức điện áp đầu ra tĩnh sẽ không đổi.
If the gate pulse voltage is large compared with the VBE of the transistors, then each transistor is biased far below cut off, when it is not conducting. So, when the gate voltage appears, Q2 will be driven into cut off before Q1 starts to conduct, whereas at the end of the gate, Q1 will be driven to cut off before Q2 starts to conduct.
The figure below explains this in a better fashion.

Hence the gate signals appear as in the above figure. The gated signal voltage will appear superimposed on this waveform. These spikes will be of negligible value if the gate waveform rise time is small compared with the gate duration.
There are few drawbacks of this circuit such as
Definite rise and fall times, result in sharp spikes
The continuous current through RC dissipates lot of heat
Two bias voltages and two control signal sources (complement to each other) make the circuit complicated.
Other than these drawbacks, this circuit is useful in the reduction of pedestal in a gate circuit.
Bidirectional gates, unlike unidirectional ones, transmit signals of both positive and negative polarities. These gates can be constructed using either transistors or diodes. From different types of circuits, let us go through a circuit made up of transistors and another made up of diodes.
Bidirectional Sampling Gates using Transistors
A basic bidirectional sampling gate consists of a transistor and three resistors. The input signal voltage VS and the control input voltage VC are applied through the summing resistors to the base of the transistor. The circuit diagram given below shows the bidirectional sampling gate using transistor.
The control input VC applied here is a pulse waveform with two levels V1 and V2 and pulse width tp. This pulse width decides the desired transmission interval. The gating signal allows the input to get transmitted. When the gating signal is at its lower level V2, the transistor goes into active region. So, until the gating input is maintained at its upper level, signals of either polarity, which appear at the base of the transistor will be sampled and appear amplified at the output.
Four Diode Bidirectional Sampling Gate
Bidirectional sampling gate circuit is made using diodes also. A two diode bidirectional sampling gate is the basic one in this model. But it has few disadvantages such as
- Nó có mức tăng thấp
- Nó nhạy cảm với sự mất cân bằng của điện áp điều khiển
- V n (min) có thể quá mức
- Có hiện tượng rò rỉ điện dung diode
Một cổng lấy mẫu hai chiều bốn diode đã được phát triển, cải thiện các tính năng này. Một mạch cổng lấy mẫu hai chiều đã được cải tiến khi thêm hai điốt nữa và hai điện áp cân bằng + v hoặc –v để tạo thành mạch của cổng lấy mẫu hai chiều bốn diode như trong hình.

Điện áp điều khiển V C và –V C phân cực ngược tương ứng với các điốt D 3 và D 4 . Các điện áp + v và –v phân cực thuận của các điốt D 1 và D 2 tương ứng. Nguồn tín hiệu được ghép với tải thông qua các điện trở R 2 và các điốt dẫn điện D 1 và D 2 . Khi các điốt D 3 và D 4 được phân cực ngược, chúng sẽ mở và ngắt tín hiệu điều khiển khỏi cổng. Vì vậy, sự mất cân bằng trong tín hiệu điều khiển sẽ không ảnh hưởng đến đầu ra.
Khi điện áp điều khiển được áp dụng là V n và –V n , thì điốt D 3 và D 4 dẫn điện. Các điểm P 2 và P 1 được kẹp vào các điện áp này, làm cho các điốt D 1 và D 2 bị lệch. Bây giờ, đầu ra bằng không.
Trong quá trình truyền, các điốt D 3 và D 4 đều TẮT. Độ lợi A của mạch được cho bởi
$$A = \frac{R_C}{R_C + R_2} \times \frac{R_L}{R_L + (R_s/2)}$$
Do đó, việc lựa chọn áp dụng điện áp điều khiển cho phép hoặc vô hiệu hóa quá trình truyền. Các tín hiệu của một trong hai cực được truyền tùy thuộc vào các đầu vào gating.
Ứng dụng của Cổng lấy mẫu
Có rất nhiều ứng dụng của mạch cổng lấy mẫu. Những cái phổ biến nhất như sau:
- Phạm vi lấy mẫu
- Multiplexers
- Lấy mẫu và giữ mạch
- Bộ chuyển đổi Digital sang Analog
- Bộ khuếch đại ổn định cắt nhỏ
Trong số các ứng dụng của mạch cổng lấy mẫu, mạch phạm vi lấy mẫu là phổ biến. Hãy để chúng tôi cố gắng có ý tưởng về sơ đồ khối của phạm vi lấy mẫu.
Phạm vi lấy mẫu
Trong phạm vi lấy mẫu, màn hình hiển thị bao gồm một chuỗi các mẫu dạng sóng đầu vào. Mỗi mẫu trong số đó được lấy tại một thời điểm bị trễ dần theo một số điểm chuẩn trong dạng sóng. Đây là nguyên lý hoạt động của phạm vi lấy mẫu được trình bày dưới đây trong sơ đồ khối.

Các ramp generator và stair case generatortạo ra các dạng sóng theo các đầu vào kích hoạt được áp dụng. Cáccomparator so sánh cả hai tín hiệu này và tạo ra đầu ra sau đó được đưa đến mạch cổng lấy mẫu như một tín hiệu điều khiển.
Khi và khi đầu vào điều khiển cao, đầu vào ở sampling gate được đưa đến đầu ra và bất cứ khi nào đầu vào điều khiển thấp, đầu vào sẽ không được truyền.
Trong khi lấy mẫu, chúng được chọn tại các phiên bản thời gian, chúng được trì hoãn dần dần theo từng bước bằng nhau. Các mẫu bao gồm một xung có thời lượng bằng khoảng thời gian điều khiển cổng lấy mẫu và biên độ của nó được xác định bằng cường độ của tín hiệu đầu vào tại thời điểm lấy mẫu. Khi đó độ rộng xung được tạo ra sẽ thấp.
Cũng giống như trong điều chế Xung, tín hiệu phải được lấy mẫu và giữ. Nhưng khi độ rộng xung thấp, nó được khuếch đại bởi một mạch khuếch đại đểstretch và sau đó được đưa cho một mạch kết hợp diode-tụ điện để holdtín hiệu, để lấp đầy khoảng thời gian của mẫu tiếp theo. Đầu ra mà mạch này được cấp chovertical deflection plates và đầu ra của mạch quét được cấp cho horizontal deflection plates của phạm vi lấy mẫu để hiển thị dạng sóng đầu ra.