Tổng quan về máy tạo cơ sở thời gian
Sau khi thảo luận về các nguyên tắc cơ bản của mạch xung, bây giờ chúng ta hãy đi qua các mạch khác nhau tạo ra và xử lý Saw tooth waves. Sóng răng cưa tăng tuyến tính theo thời gian và giảm đột ngột. Điều này cũng được gọi làTime base signal. Trên thực tế, đây là đầu ra lý tưởng của một máy phát điện cơ bản thời gian.
Máy tạo cơ sở thời gian là gì?
Một máy phát điện tử tạo ra high frequency saw tooth waves có thể được gọi là Time Base Generator. Nó cũng có thể được hiểu là một mạch điện tử tạo ra điện áp đầu ra hoặc dạng sóng dòng điện, một phần củavaries linearly with time. Vận tốc ngang của máy phát thời gian phải không đổi.
Để hiển thị các biến thể của tín hiệu theo thời gian trên máy hiện sóng, một điện áp thay đổi tuyến tính theo thời gian, phải được đặt vào các tấm lệch hướng. Điều này làm cho tín hiệu quét chùm theo chiều ngang của màn hình. Do đó điện áp được gọi làSweep Voltage. Máy tạo cơ sở thời gian được gọi làSweep Circuits.
Đặc điểm của tín hiệu cơ sở thời gian
Để tạo ra dạng sóng cơ sở thời gian trong CRO hoặc ống hình ảnh, điện áp làm lệch hướng tăng tuyến tính theo thời gian. Nói chung, bộ tạo cơ sở thời gian được sử dụng khi chùm tia lệch tuyến tính trên màn hình và quay trở lại điểm xuất phát của nó. Điều này xảy ra trong quá trìnhScanning. Một ống tia âm cực và một ống hình ảnh hoạt động theo nguyên tắc giống nhau. Chùm tia lệch qua màn hình từ bên này sang bên kia (thường là từ trái sang phải) và quay trở lại cùng một điểm.
Hiện tượng này được gọi là Trace và Retrace. Sự lệch của chùm tia qua màn từ trái sang phải được gọi làTrace, trong khi sự trở lại của chùm tia từ phải sang trái được gọi là Retrace hoặc là Fly back. Thông thường không nhìn thấy được đường hồi này. Quá trình này được thực hiện với sự trợ giúp của bộ tạo sóng răng cưa đặt khoảng thời gian lệch hướng với sự trợ giúp của các thành phần RC được sử dụng.
Chúng ta hãy thử tìm hiểu các phần của sóng răng cưa.

Trong tín hiệu trên, thời gian mà đầu ra tăng tuyến tính được gọi là Sweep Time (TS) và thời gian cần thiết để tín hiệu trở lại giá trị ban đầu được gọi là Restoration Time hoặc là Fly back Time hoặc là Retrace Time (Tr). Cả hai khoảng thời gian này cùng nhau tạo thành Khoảng thời gian của một chu kỳ của tín hiệu Cơ sở thời gian.
Trên thực tế, dạng sóng điện áp quét này mà chúng ta nhận được là đầu ra thực tế của mạch quét trong khi đầu ra lý tưởng phải là dạng sóng răng cưa được hiển thị trong hình trên.
Các loại máy tạo cơ sở thời gian
Có hai loại Máy tạo cơ sở thời gian. Họ là -
Voltage Time Base Generators - Máy phát điện cơ bản thời gian cung cấp dạng sóng điện áp đầu ra thay đổi tuyến tính theo thời gian được gọi là Máy phát điện cơ sở thời gian.
Current Time Base Generator - Bộ tạo cơ sở thời gian cung cấp dạng sóng dòng điện đầu ra thay đổi tuyến tính theo thời gian được gọi là Bộ tạo cơ sở thời gian hiện tại.
Các ứng dụng
Máy tạo cơ sở thời gian được sử dụng trong CRO, TV, màn hình RADAR, hệ thống đo thời gian chính xác và điều chế thời gian.
Lỗi của tín hiệu quét
Sau khi tạo ra các tín hiệu quét, đã đến lúc truyền chúng. Tín hiệu truyền đi có thể bị sai lệch so với tuyến tính. Để hiểu và sửa các lỗi xảy ra, chúng ta phải có một số kiến thức về các lỗi thường xảy ra.
Độ lệch so với tuyến tính được thể hiện theo ba cách khác nhau. Họ là -
- Lỗi độ dốc hoặc tốc độ quét
- Lỗi dịch chuyển
- Lỗi truyền
Hãy để chúng tôi thảo luận chi tiết về những điều này.
Dốc hoặc Sweep Speed Lỗi (e s )
Điện áp quét phải tăng tuyến tính theo thời gian. Tốc độ thay đổi điện áp quét theo thời gian phải không đổi. Độ lệch này so với tuyến tính được định nghĩa làSlope Speed Error hoặc là Sweep Speed Error.
Độ dốc hoặc Tốc độ quét eror e s = $ \ frac {chênh lệch \: in \: độ dốc \: tại \: \: đầu \: và \: kết thúc \: của \: quét} {ban đầu \: giá trị \: của \ : dốc} $
$$ = \ frac {\ left (\ frac {\ mathrm {d} V_0} {\ mathrm {d} t} \ right) _ {t = 0} - \ left (\ frac {\ mathrm {d} V_0} {\ mathrm {d} t} \ right) _ {t = T_s}} {\ left (\ frac {\ mathrm {d} V_0} {\ mathrm {d} t} \ right) _ {t = 0}} $$
Lỗi dịch chuyển (e d )
Một tiêu chí quan trọng của độ tuyến tính là sự khác biệt lớn nhất giữa điện áp quét thực tế và điện áp quét tuyến tính đi qua điểm đầu và điểm cuối của quá trình quét thực tế.
Điều này có thể được hiểu từ hình sau.
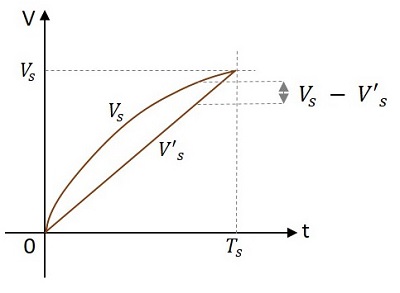
Lỗi dịch chuyển ed được định nghĩa là
e d = $ \ frac {(thực \: tốc độ) \ thicksim (tuyến tính \: quét \: đó \: đi qua \: bắt đầu \: và \: kết thúc \: của \: thực \: quét)} {biên độ \: của \: quét \: tại \: \: kết thúc \: của \: quét \: thời gian} $
$$ = \: \ frac {(V_s - V′_s) _ {max}} {V_s} $$
Trong đó V s là quét thực tế và V' s là quét tuyến tính.
Lỗi truyền (e t )
Khi một tín hiệu quét đi qua một mạch thông cao, đầu ra sẽ bị lệch khỏi đầu vào như hình dưới đây.
Sai lệch này được biểu thị dưới dạng sai số truyền.
Lỗi truyền = $ \ frac {(input) \: \ thicksim \ :( output)} {input \: at \: the \: end \: of \: the \: scan} $
$$ e_t = \ frac {V′_s - V} {V′_s} $$
Trong đó V ' s là đầu vào và V s là đầu ra khi kết thúc quá trình quét tức là tại t = T s .
Nếu độ lệch so với tuyến tính là rất nhỏ và điện áp quét có thể được xấp xỉ bằng tổng các số hạng tuyến tính và bậc hai trong t, thì ba lỗi trên có liên quan đến
$$ e_d = \ frac {e_s} {8} = \ frac {e_t} {4} $$
$$ e_s = 2e_t = 8e_d $$
Sai số tốc độ quét chiếm ưu thế hơn so với sai số dịch chuyển.