Sistemas de radar - Guía rápida
RADAR es un sistema de detección de base electromagnética que funciona mediante la radiación de ondas electromagnéticas y luego estudia el eco o las ondas de retorno reflejadas.
La forma completa de RADAR es RAdio Detección ADakota del Norte Renvejecimiento. La detección se refiere a si el objetivo está presente o no. El objetivo puede ser estacionario o móvil, es decir, no estacionario. El alcance se refiere a la distancia entre el radar y el objetivo.
Los radares se pueden utilizar para diversas aplicaciones en tierra, mar y espacio. losapplications de los radares se enumeran a continuación.
- Control del tráfico aéreo
- Seguridad del barco
- Detectando los lugares remotos
- Aplicaciones militares
En cualquier aplicación de Radar, el principio básico sigue siendo el mismo. Analicemos ahora el principio del radar.
Principio básico del radar
El radar se utiliza para detectar los objetos y encontrar su ubicación. Podemos entender elbasic principle del radar de la siguiente figura.

Como se muestra en la figura, Radar consta principalmente de un transmisor y un receptor. Utiliza la misma antena tanto para transmitir como para recibir las señales. La función deltransmitter es transmitir la señal del radar en la dirección del objetivo presente.
El objetivo refleja esta señal recibida en varias direcciones. La señal, que se refleja hacia la antena, es recibida por elreceiver.
Terminología de los sistemas de radar
A continuación se muestran los términos básicos, que son útiles en este tutorial.
- Range
- Frecuencia de repetición de pulsos
- Alcance máximo inequívoco
- Rango mínimo
Ahora, analicemos estos términos básicos uno por uno.
Rango
La distancia entre el radar y el objetivo se llama Range del objetivo o simplemente rango, R. Sabemos que el radar transmite una señal al objetivo y, en consecuencia, el objetivo envía una señal de eco al radar con la velocidad de la luz, C.
Deje que el tiempo que tarda la señal en viajar desde el radar al objetivo y de regreso al radar sea 'T'. La distancia bidireccional entre el radar y el objetivo será 2R, ya que la distancia entre el radar y el objetivo es R.
Ahora, la siguiente es la fórmula para Speed.
$$Speed= \frac{Distance}{Time}$$
$$\Rightarrow Distance=Speed\times Time$$
$$\Rightarrow 2R=C\times T$$
$$R=\frac{CT}{2}\:\:\:\:\:Equation\:1$$
Podemos encontrar el range of the target sustituyendo los valores de C & T en la Ecuación 1.
Frecuencia de repetición de pulsos
Las señales de radar deben transmitirse en cada pulso de reloj. La duración entre los dos pulsos de reloj debe elegirse correctamente de tal manera que la señal de eco correspondiente al pulso de reloj actual se reciba antes del siguiente pulso de reloj. Un típicoRadar wave form se muestra en la siguiente figura.

Como se muestra en la figura, Radar transmite una señal periódica. Tiene una serie de pulsos estrechos de forma rectangular. El intervalo de tiempo entre los sucesivos pulsos de reloj se llamapulse repetition time, $T_P$.
El recíproco del tiempo de repetición del pulso se llama pulse repetition frequency, $f_P$. Matemáticamente, se puede representar como
$$f_P=\frac{1}{T_P}\:\:\:\:\:Equation\:2$$Por lo tanto, la frecuencia de repetición de pulsos no es más que la frecuencia a la que Radar transmite la señal.
Alcance máximo inequívoco
Sabemos que las señales de radar deben transmitirse en cada pulso de reloj. Si seleccionamos una duración más corta entre los dos pulsos de reloj, la señal de eco correspondiente al pulso de reloj actual se recibirá después del siguiente pulso de reloj. Debido a esto, el rango del objetivo parece ser menor que el rango real.
Entonces, tenemos que seleccionar la duración entre los dos pulsos de reloj de tal manera que la señal de eco correspondiente al pulso de reloj actual se reciba antes de que comience el siguiente pulso de reloj. Luego, obtendremos el rango real del objetivo y también se denomina rango máximo inequívoco del objetivo o simplemente,maximum unambiguous range.
Sustituir, $R=R_{un}$ y $T=T_P$ en la ecuación 1.
$$R_{un}=\frac{CT_P}{2}\:\:\:\:\:Equation\:3$$
De la Ecuación 2, obtendremos el tiempo de repetición del pulso, $T_P$ como el recíproco de la frecuencia de repetición del pulso, $f_P$. Mathematically, se puede representar como
$$T_P=\frac{1}{f_P}\:\:\:\:\:Equation\:4$$
Sustituya la Ecuación 4 en la Ecuación 3.
$$R_{un}=\frac{C\left ( \frac{1}{f_P} \right )}{2}$$
$$R_{un}=\frac{C}{2f_P}\:\:\:\:\:Equation\:5$$
Podemos usar la Ecuación 3 o la Ecuación 5 para calcular el rango máximo inequívoco del objetivo.
Obtendremos el valor del rango máximo inequívoco del objetivo, $R_{un}$ sustituyendo los valores de $C$ y $T_P$ en la ecuación 3.
De manera similar, obtendremos el valor del rango máximo inequívoco del objetivo, $R_{un}$ sustituyendo los valores de $C$ y $f_P$ en la ecuación 5.
Rango mínimo
Obtendremos el minimum rangedel objetivo, cuando consideramos el tiempo requerido para que la señal de eco se reciba en el radar después de que la señal se transmita desde el radar como ancho de pulso. También se le llama el rango más corto del objetivo.
Sustituir, $R=R_{min}$ y $T=\tau$ en la ecuación 1.
$$R_{min}=\frac{C\tau}{2}\:\:\:\:\:Equation\:6$$
Obtendremos el valor del rango mínimo del objetivo, $R_{min}$ sustituyendo los valores de $C$ y $\tau$ en la ecuación 6.
La ecuación del alcance del radar es útil para conocer el alcance del objetivo theoretically. En este capítulo, discutiremos la forma estándar de la ecuación de rango de radar y luego discutiremos sobre las dos formas modificadas de la ecuación de rango de radar.
Obtendremos esas formas modificadas de ecuación de rango de radar a partir de la forma estándar de ecuación de rango de radar. Ahora, analicemos la derivación de la forma estándar de la ecuación de rango de radar.
Derivación de la ecuación del alcance del radar
La forma estándar de la ecuación de rango de radar también se denomina forma simple de ecuación de rango de radar. Ahora, derivemos la forma estándar de la ecuación de rango de radar.
Lo sabemos power densityno es más que la relación de potencia y área. Entonces, la densidad de potencia,$P_{di}$ a distancia, R del radar se puede representar matemáticamente como:
$$P_{di}=\frac{P_t}{4\pi R^2}\:\:\:\:\:Equation\:1$$
Dónde,
$P_t$La densidad de potencia anterior es válida para una antena isotrópica. En general, los radares utilizan antenas direccionales. Por lo tanto, la densidad de potencia,$P_{dd}$ debido a la antena direccional será -
$$P_{dd}=\frac{P_tG}{4\pi R^2}\:\:\:\:\:Equation\:2$$
El objetivo irradia la potencia en diferentes direcciones desde la potencia de entrada recibida. La cantidad de potencia que se refleja hacia el radar depende de su sección transversal. Entonces, la densidad de potencia$P_{de}$ de la señal de eco en el radar se puede representar matemáticamente como -
$$P_{de}=P_{dd}\left (\frac{\sigma}{4\pi R^2}\right )\:\:\:\:\:Equation\:3$$ Sustituya la Ecuación 2 en la Ecuación 3.
$$P_{de}=\left (\frac{P_tG}{4\pi R^2}\right )\left (\frac{\sigma}{4\pi R^2}\right )\:\:\:\:\:Equation\:4$$
La cantidad de power, $P_r$ received por el radar depende de la apertura efectiva, $A_e$ de la antena receptora.
$$P_r=P_{de}A_e\:\:\:\:\:Equation\:5$$
Sustituya la Ecuación 4 en la Ecuación 5.
$$P_r=\left (\frac{P_tG}{4\pi R^2}\right )\left (\frac{\sigma}{4\pi R^2}\right )A_e$$
$$\Rightarrow P_r=\frac{P_tG\sigma A_e}{\left (4\pi\right )^2 R^4}$$
$$\Rightarrow R^4=\frac{P_tG\sigma A_e}{\left (4\pi\right )^2 P_r}$$
$$\Rightarrow R=\left [\frac{P_tG\sigma A_e}{\left (4\pi\right )^2 P_r}\right ]^{1/4}\:\:\:\:\:Equation\:6$$
Forma estándar de ecuación de alcance de radar
Si la señal de eco tiene una potencia menor que la potencia de la señal mínima detectable, entonces el radar no puede detectar el objetivo ya que está más allá del límite máximo del rango del radar.
Por lo tanto, podemos decir que se dice que el rango del objetivo es el rango máximo cuando la señal de eco recibida tiene una potencia igual a la de la señal mínima detectable. Obtendremos la siguiente ecuación, sustituyendo$R=R_{Max}$ y $P_r=S_{min}$ en la ecuación 6.
$$R_{Max}=\left [\frac{P_tG\sigma A_e}{\left (4\pi\right )^2 S_{min}}\right ]^{1/4}\:\:\:\:\:Equation\:7$$
La ecuación 7 representa la standard formde la ecuación del alcance del radar. Al usar la ecuación anterior, podemos encontrar el rango máximo del objetivo.
Formas modificadas de ecuación de rango de radar
Conocemos la siguiente relación entre la ganancia de la antena direccional, $G$ y apertura efectiva, $A_e$.
$$G=\frac{4\pi A_e}{\lambda^2}\:\:\:\:\:Equation\:8$$
Sustituya la Ecuación 8 en la Ecuación 7.
$$R_{Max}=\left [ \frac{P_t\sigma A_e}{\left ( 4\pi \right )^2S_{min}}\left ( \frac{4\pi A_e}{\lambda^2} \right ) \right ]^{1/4}$$
$$\Rightarrow R_{Max}=\left [\frac{P_tG\sigma {A_e}^2}{4\pi \lambda^2 S_{min}}\right ]^{1/4}\:\:\:\:\:Equation\:9$$
La ecuación 9 representa la modified formde la ecuación del alcance del radar. Al usar la ecuación anterior, podemos encontrar el rango máximo del objetivo.
Obtendremos la siguiente relación entre apertura efectiva, $A_e$ y la ganancia de la antena direccional, $G$ de la ecuación 8.
$$A_e=\frac{G\lambda^2}{4\pi}\:\:\:\:\:Equation\:10$$
Sustituya la Ecuación 10 en la Ecuación 7.
$$R_{Max}=\left [\frac{P_tG\sigma}{\left (4\pi\right )^2 S_{min}}(\frac{G\lambda^2}{4\pi})\right ]^{1/4}$$
$$\Rightarrow R_{Max}=\left [\frac{P_tG^2 \lambda^2 \sigma}{\left (4\pi\right )^2 S_{min}}\right ]^{1/4}\:\:\:\:\:Equation\:11$$
La ecuación 11 representa another modified form de la ecuación del alcance del radar. Al usar la ecuación anterior, podemos encontrar el rango máximo del objetivo.
Note - Según los datos proporcionados, podemos encontrar el rango máximo del objetivo utilizando una de estas tres ecuaciones, a saber
- Ecuación 7
- Ecuación 9
- Ecuación 11
Problemas de ejemplo
En la sección anterior, obtuvimos las formas estándar y modificada de la ecuación de rango del radar. Ahora, resuelva algunos problemas usando esas ecuaciones.
Problema 1
Calcula el maximum range of Radar para las siguientes especificaciones:
- Potencia máxima transmitida por el radar, $P_t=250KW$
- Ganancia de antena transmisora, $G=4000$
- Apertura efectiva de la antena receptora, $A_e=4\:m^2$
- Sección transversal del radar del objetivo, $\sigma=25\:m^2$
- Potencia de señal mínima detectable, $S_{min}=10^{-12}W$
Solución
Podemos usar lo siguiente standard form de la ecuación de alcance del radar para calcular el alcance máximo del radar para especificaciones dadas.
$$R_{Max}=\left [\frac{P_tG \sigma A_e}{\left (4\pi \right )^2 S_{min}}\right ]^{1/4}$$
Substitute todos los parámetros dados en la ecuación anterior.
$$R_{Max}=\left [\frac{ \left ( 250\times 10^3 \right )\left ( 4000 \right )\left ( 25 \right )\left ( 4 \right )}{\left ( 4\pi \right )^2 \left ( 10^{-12} \right )} \right ]^{1/4}$$
$$\Rightarrow R_{Max}=158\:KM$$
Por lo tanto, los maximum range of Radar para especificaciones dadas es $158\:KM$.
Problema 2
Calcula el maximum range of Radar para las siguientes especificaciones.
- Frecuencia de operación, $f=10GHZ$
- Potencia máxima transmitida por el radar, $P_t=400KW$
- Apertura efectiva de la antena receptora, $A_e=5\:m^2$
- Sección transversal del radar del objetivo, $\sigma=30\:m^2$
- Potencia de señal mínima detectable, $S_{min}=10^{-10}W$
Solución
Conocemos la siguiente fórmula para operating wavelength, $\lambda$ en términos de frecuencia de operación, f.
$$\lambda =\frac{C}{f}$$
Sustituir, $C=3\times 10^8m/sec$ y $f=10GHZ$ en la ecuación anterior.
$$\lambda =\frac{3\times 10^8}{10\times 10^9}$$
$$\Rightarrow \lambda=0.03m$$
Entonces el operating wavelength,$\lambda$ es igual a $0.03m$, cuando la frecuencia de funcionamiento, $f$ es $10GHZ$.
Podemos usar lo siguiente modified form de la ecuación de alcance del radar para calcular el alcance máximo del radar para especificaciones dadas.
$$R_{Max}=\left [\frac{P_t \sigma {A_e}^2}{4\pi \lambda^2 S_{min}}\right ]^{1/4}$$
Substitute, los parámetros dados en la ecuación anterior.
$$R_{Max}=\left [ \frac{\left ( 400\times 10^3 \right )\left ( 30 \right )\left ( 5^2 \right )}{4\pi\left ( 0.003 \right )^2\left ( 10 \right )^{-10}} \right ]^{1/4}$$
$$\Rightarrow R_{Max}=128KM$$
Por lo tanto, los maximum range of Radar para especificaciones dadas es $128\:KM$.
Los factores que afectan el rendimiento del radar se conocen como factores de rendimiento del radar. En este capítulo, analicemos esos factores. Sabemos que lo siguientestandard form de la ecuación de alcance del radar, que es útil para calcular el alcance máximo del radar para especificaciones dadas.
$$R_{Max}=\left [\frac{P_tG\sigma A_e}{\left (4\pi\right )^2 S_{min}}\right ]^{1/4}$$
Dónde,
$P_t$ es la potencia máxima transmitida por el radar
$G$ es la ganancia de la antena transmisora
$\sigma$ es la sección transversal del radar del objetivo
$A_e$ es la apertura efectiva de la antena receptora
$S_{min}$ es la potencia de la señal mínima detectable
De la ecuación anterior, podemos concluir que lo siguiente conditions debe tenerse en cuenta para obtener el alcance del radar al máximo.
- Potencia máxima transmitida por el radar $P_t$ debe ser alto.
- Ganancia de la antena transmisora $G$ debe ser alto.
- Sección transversal del radar del objetivo $\sigma$ debe ser alto.
- Apertura efectiva de la antena receptora $A_e$ debe ser alto.
- Potencia de señal mínima detectable $S_{min}$ debe ser bajo.
Es difícil predecir el alcance del objetivo a partir de la forma estándar de la ecuación del alcance del radar. Esto significa que el grado de precisión que proporciona la ecuación de alcance del radar sobre el alcance del objetivo es menor. Porque, los parámetros como la sección transversal del radar del objetivo,$\sigma$ y señal mínima detectable, $S_{min}$ son statistical in nature.
Señal mínima detectable
Si la señal de eco tiene una potencia mínima, la detección de esa señal por el radar se conoce como minimum detectable signal. Esto significa que el radar no puede detectar la señal de eco si esa señal tiene menos potencia que la potencia mínima.
En general, Radar recibe la señal de eco además de ruido. Si el valor de umbral se usa para detectar la presencia del objetivo a partir de la señal recibida, entonces esa detección se llamathreshold detection.
Tenemos que seleccionar el valor de umbral adecuado en función de la fuerza de la señal a detectar.
Se debe elegir un valor de umbral alto cuando la fuerza de la señal a detectar sea alta para eliminar la señal de ruido no deseada presente en ella.
De manera similar, se debe elegir un valor de umbral bajo cuando la fuerza de la señal a detectar sea baja.
El seguimiento figure ilustra este concepto -

UN typical waveformdel receptor de radar se muestra en la figura anterior. El eje xy el eje y representan el tiempo y el voltaje respectivamente. El valor eficaz del ruido y el valor umbral se indican con líneas de puntos en la figura anterior.
Hemos considerado tres puntos, A, B y C en la figura anterior para identificar las detecciones válidas y las detecciones faltantes.
El valor de la señal en el punto A es mayor que el valor umbral. Por tanto, es unvalid detection.
El valor de la señal en el punto B es igual al valor umbral. Por tanto, es unvalid detection.
Aunque el valor de la señal en el punto C está más cerca del valor de umbral, es un missing detection. Porque, el valor de la señal en el punto C es menor que el valor umbral.
Entonces, los puntos, A y B son detecciones válidas. Considerando que, el punto C es una detección faltante.
Ruido del receptor
Si el receptor genera un componente de ruido en la señal, que se recibe en el receptor, ese tipo de ruido se conoce como ruido del receptor. losreceiver noisees un componente no deseado; deberíamos intentar eliminarlo con algunas precauciones.
Sin embargo, existe un tipo de ruido que se conoce como ruido térmico. Ocurre debido al movimiento térmico de los electrones de conducción. Matemáticamente, podemos escribirthermal noise power, $N_i$ producido en el receptor como -
$$N_i=KT_oB_n$$
Dónde,
$K$ es la constante de Boltzmann y es igual a $1.38\times 10^{-23}J/deg$
$T_o$ es la temperatura absoluta y es igual a $290^0K$
$B_n$ es el ancho de banda del receptor
Figura de mérito
los Figure of Merit, F no es más que la relación de entrada SNR, $(SNR)_i$ y salida SNR, $(SNR)_o$. Matemáticamente, se puede representar como:
$$F=\frac{(SNR)_i}{(SNR)_o}$$
$$\Rightarrow F=\frac{S_i/N_i}{S_o/N_o}$$
$$\Rightarrow F=\frac{N_oS_i}{N_iS_o}$$
$$\Rightarrow S_i=\frac{FN_iS_o}{N_o}$$
Sustituir, $N_i=KT_oB_n$ en la ecuación anterior.
$$\Rightarrow S_i=FKT_oB_n\left ( \frac{S_o}{N_o}\right )$$
La potencia de la señal de entrada tendrá un valor mínimo, cuando la SNR de salida tenga un valor mínimo.
$$\Rightarrow S_{min}=FKT_oB_n\left ( \frac{S_o}{N_o}\right )_{min}$$
Sustituir, lo anterior $S_{min}$ en la siguiente forma estándar de ecuación de rango de radar.
$$R_{Max}=\left [\frac{P_tG\sigma A_e}{\left (4\pi\right )^2 S_{min}}\right ]^{1/4}$$
$$\Rightarrow R_{Max}=\left [\frac{P_tG\sigma A_e}{\left (4\pi\right )^2 FKT_oB_n\left ( \frac{S_o}{N_o}\right )_{min}}\right ]^{1/4}$$
De la ecuación anterior, podemos concluir que lo siguiente conditions debe tenerse en cuenta para obtener el alcance del radar al máximo.
- Potencia máxima transmitida por el radar, $P_t$ debe ser alto.
- Ganancia de la antena transmisora $G$ debe ser alto.
- Sección transversal del radar del objetivo $\sigma$ debe ser alto.
- Apertura efectiva de la antena receptora $A_e$ debe ser alto.
- La figura de Merit F debe ser baja.
- Ancho de banda del receptor $B_n$ debe ser bajo.
En este capítulo, discutiremos brevemente los diferentes tipos de radar. Este capítulo proporciona información breve sobre los tipos de radares. Los radares se pueden clasificar en los siguientestwo types basado en el tipo de señal con la que se puede operar el radar.
- Radar de pulso
- Radar de onda continua
Ahora, analicemos estos dos tipos de radares uno por uno.
Radar de pulso
El radar, que opera con señal de pulso, se llama Pulse Radar. Los radares de pulso se pueden clasificar en los dos tipos siguientes según el tipo de objetivo que detecta.
- Radar de pulso básico
- Radar indicador de objetivo móvil
Analicemos ahora brevemente los dos radares.
Radar de pulso básico
El radar, que opera con una señal de pulso para detectar objetivos estacionarios, se llama Basic Pulse Radaro simplemente, Pulse Radar. Utiliza una sola antena para transmitir y recibir señales con la ayuda de Duplexer.
La antena transmitirá una señal de pulso en cada pulso del reloj. La duración entre los dos pulsos de reloj debe elegirse de tal manera que la señal de eco correspondiente al pulso de reloj actual se reciba antes del siguiente pulso de reloj.
Radar indicador de objetivo móvil
El radar, que funciona con una señal de pulso para detectar objetivos no estacionarios, se llama radar de indicación de objetivo móvil o simplemente, MTI Radar. Utiliza una antena única para la transmisión y recepción de señales con la ayuda de Duplexer.
MTI Radar utiliza el principio de Doppler effect para distinguir los objetivos no estacionarios de los objetos estacionarios.
Radar de onda continua
El Radar, que opera con señal u onda continua, se llama Continuous Wave Radar. Utilizan el efecto Doppler para detectar objetivos no estacionarios. Los radares de onda continua se pueden clasificar en los dos tipos siguientes.
- Radar de onda continua sin modular
- Radar de onda continua de frecuencia modulada
Ahora, analicemos brevemente los dos radares.
Radar de onda continua sin modular
El radar, que opera con señal continua (onda) para detectar objetivos no estacionarios, se llama radar de onda continua sin modular o simplemente, CW Radar. También se llama Radar Doppler CW.
Este radar requiere dos antenas. De estas dos antenas, una se usa para transmitir la señal y la otra se usa para recibir la señal. Mide solo la velocidad del objetivo, pero no la distancia entre el objetivo y el radar.
Radar de onda continua de frecuencia modulada
Si el radar Doppler CW usa la modulación de frecuencia, entonces ese radar se llama onda continua modulada en frecuencia. (FMCW)Radar o radar Doppler FMCW. También se denomina radar de frecuencia de onda continua modulada o radar CWFM.
Este radar requiere dos antenas. Entre las cuales, una antena se usa para transmitir la señal y la otra antena se usa para recibir la señal. Mide no solo la velocidad del objetivo, sino también la distancia del objetivo al radar.
En los capítulos siguientes, analizaremos el funcionamiento de todos estos radares en detalle.
El radar, que opera con una señal de pulso para detectar objetivos estacionarios, se llama radar de pulso básico o simplemente, Pulse Radar. En este capítulo, analicemos el funcionamiento de Pulse Radar.
Diagrama de bloques del radar de pulsos
Pulse Radar utiliza una antena única para transmitir y recibir señales con la ayuda de Duplexer. Lo siguiente es elblock diagram de Pulse Radar -

Veamos ahora el function de cada bloque de Pulse Radar -
Pulse Modulator - Produce una señal modulada por pulsos y se aplica al transmisor.
Transmitter - Transmite la señal modulada por pulsos, que es un tren de pulsos repetitivos.
Duplexer- Es un interruptor de microondas, que conecta la antena tanto a la sección del transmisor como a la sección del receptor alternativamente. La antena transmite la señal modulada por pulsos, cuando el duplexor conecta la antena al transmisor. Del mismo modo, la señal que recibe la antena se enviará al amplificador de RF de bajo ruido cuando el duplexor conecte la antena al amplificador de RF de bajo ruido.
Low Noise RF Amplifier- Amplifica la débil señal de RF que recibe la antena. La salida de este amplificador está conectada a Mixer.
Local Oscillator- Produce una señal con frecuencia estable. La salida del oscilador local está conectada al mezclador.
Mixer- Sabemos que Mixer puede producir tanto la suma como la diferencia de las frecuencias que se le aplican. Entre los cuales, la diferencia de frecuencias será de tipo Frecuencia intermedia (FI).
IF Amplifier- El amplificador de FI amplifica la señal de frecuencia intermedia (FI). El amplificador de FI que se muestra en la figura permite solo la frecuencia intermedia, que se obtiene del mezclador y la amplifica. Mejora la relación señal / ruido en la salida.
Detector - Demodula la señal, que se obtiene a la salida del Amplificador de FI.
Video Amplifier - Como sugiere el nombre, amplifica la señal de video, que se obtiene a la salida del detector.
Display - En general, muestra la señal de video amplificada en la pantalla CRT.
En este capítulo, discutimos cómo funciona el radar de pulsos y cómo es útil para detectar objetivos estacionarios. En los capítulos siguientes, analizaremos los radares, que son útiles para detectar objetivos no estacionarios.
En este capítulo, aprenderemos sobre el efecto Doppler en sistemas de radar.
Si el objetivo no está estacionario, habrá un cambio en la frecuencia de la señal que se transmite desde el Radar y que es recibida por el Radar. Este efecto se conoce comoDoppler effect.
De acuerdo con el efecto Doppler, obtendremos los siguientes dos casos posibles:
los frequency de la señal recibida increase, cuando el objetivo se mueve hacia la dirección del radar.
los frequency de la señal recibida decrease, cuando el objetivo se aleja del radar.
Ahora, derivemos la fórmula para la frecuencia Doppler.
Derivación de la frecuencia Doppler
La distancia entre el radar y el objetivo no es más que la Range del objetivo o simplemente rango, R. Por lo tanto, la distancia total entre el radar y el objetivo en una ruta de comunicación bidireccional será 2R, ya que el radar transmite una señal al objetivo y, en consecuencia, el objetivo envía una señal de eco al radar.
Si $\lambda$ es una longitud de onda, entonces el número de longitudes de onda N que están presentes en una ruta de comunicación bidireccional entre el radar y el objetivo será igual a $2R/\lambda$.
Sabemos que una longitud de onda $\lambda$ corresponde a una excursión angular de $2\pi$radianes. Entonces eltotal angle of excursion hecha por la onda electromagnética durante la ruta de comunicación bidireccional entre el radar y el objetivo será igual a $4\pi R/\lambda$ radianes.
A continuación se muestra la fórmula matemática para angular frequency, $\omega$ -
$$\omega=2\pi f\:\:\:\:\:Equation\:1$$
La siguiente ecuación muestra la relación matemática entre la frecuencia angular $\omega$ y ángulo de fase $\phi$ -
$$\omega=\frac{d\phi }{dt}\:\:\:\:\:Equation\:2$$
Equate los términos del lado derecho de la Ecuación 1 y la Ecuación 2, ya que los términos del lado izquierdo de esas dos ecuaciones son iguales.
$$2\pi f=\frac{d\phi }{dt}$$
$$\Rightarrow f =\frac{1}{2\pi}\frac{d\phi }{dt}\:\:\:\:\:Equation\:3$$
Substitute,$f=f_d$ y $\phi=4\pi R/\lambda$ en la ecuación 3.
$$f_d =\frac{1}{2\pi}\frac{d}{dt}\left ( \frac{4\pi R}{\lambda} \right )$$
$$\Rightarrow f_d =\frac{1}{2\pi}\frac{4\pi}{\lambda}\frac{dR}{dt}$$
$$\Rightarrow f_d =\frac{2V_r}{\lambda}\:\:\:\:\:Equation\:4$$
Dónde,
$f_d$ es la frecuencia Doppler
$V_r$ es la velocidad relativa
Podemos encontrar el valor de la frecuencia Doppler $f_d$ sustituyendo los valores de $V_r$ y $\lambda$ en la ecuación 4.
Substitute, $\lambda=C/f$ en la ecuación 4.
$$f_d =\frac{2V_r}{C/f}$$
$$\Rightarrow f_d =\frac{2V_rf}{C}\:\:\:\:\:Equation\:5$$
Dónde,
$f$ es la frecuencia de la señal transmitida
$C$ es la velocidad de la luz y es igual a $3\times 10^8m/sec$
Podemos encontrar el valor de la frecuencia Doppler, $f_d$ sustituyendo los valores de $V_r,f$ y $C$ en la ecuación 5.
Note - Tanto la Ecuación 4 como la Ecuación 5 muestran las fórmulas de la frecuencia Doppler, $f_d$. Podemos usar la Ecuación 4 o la Ecuación 5 para encontrarDoppler frequency, $f_d$ basado en los datos proporcionados.
Problema de ejemplo
Si el radar funciona a una frecuencia de $5GHZ$, luego encuentra el Doppler frequency de un avión en movimiento a una velocidad de 100 km / h.
Solución
Dado,
La frecuencia de la señal transmitida, $f=5GHZ$
Velocidad de la aeronave (objetivo), $V_r=100KMph$
$$\Rightarrow V_r=\frac{100\times 10^3}{3600}m/sec$$
$$\Rightarrow V_r=27.78m/sec$$
Hemos convertido la velocidad dada de la aeronave (objetivo), que está presente en KMph en su equivalente m / seg.
Sabemos que la velocidad de la luz $C=3\times 10^8m/sec$
Ahora, lo siguiente es el formula for Doppler frequency -
$$f_d=\frac{2Vrf}{C}$$
Substitute los valores de ð ?? '‰ ð ??' Ÿ, $V_r,f$ y $C$ en la ecuación anterior.
$$\Rightarrow f_d=\frac{2\left ( 27.78 \right )\left ( 5\times 10^9 \right )}{3\times 10^8}$$
$$\Rightarrow f_d=926HZ$$
Por tanto, el valor de Doppler frequency, $f_d$ es $926HZ$ para las especificaciones dadas.
El radar básico utiliza la misma antena tanto para la transmisión como para la recepción de señales. Podemos utilizar este tipo de Radar, cuando el objetivo está parado, es decir, no se mueve y / o cuando ese Radar se puede operar con señal de pulso.
El radar, que opera con señal continua (onda) para detectar objetivos no estacionarios, se llama radar de onda continua o simplemente CW Radar. Este radar requiere dos antenas. Entre las cuales, una antena se usa para transmitir la señal y la otra antena se usa para recibir la señal.
Diagrama de bloques del radar CW
Sabemos que el radar CW Doppler contiene dos antenas: antena transmisora y antena receptora. La siguiente figura muestra elblock diagram del radar CW -

El diagrama de bloques de CW Doppler Radar contiene un conjunto de bloques y el function de cada bloque se menciona a continuación.
CW Transmitter - Produce una señal analógica con una frecuencia de $f_o$. La salida del transmisor CW está conectada tanto a la antena transmisora como al mezclador-I.
Local Oscillator - Produce una señal que tiene una frecuencia de $f_l$. La salida del oscilador local está conectada a Mixer-I.
Mixer-I- El mezclador puede producir tanto la suma como la diferencia de las frecuencias que se le aplican. Las señales que tienen frecuencias de$f_o$ y $f_l$se aplican a Mixer-I. Entonces, el Mixer-I producirá la salida con frecuencias$f_o+f_l$ o $f_o−f_l$.
Side Band Filter- Como su nombre indica, el filtro de banda lateral permite frecuencias de banda lateral en particular, ya sea frecuencias de banda lateral superior o frecuencias de banda lateral inferior. El filtro de banda lateral que se muestra en la figura anterior produce solo una frecuencia de banda lateral superior, es decir,$f_o+f_l$.
Mixer-II- El mezclador puede producir tanto la suma como la diferencia de las frecuencias que se le aplican. Las señales que tienen frecuencias de$f_o+f_l$ y $f_o\pm f_d$se aplican a Mixer-II. Entonces, el Mixer-II producirá la salida con frecuencias de 2$f_o+f_l\pm f_d$ o $f_l\pm f_d$.
IF Amplifier- El amplificador de FI amplifica la señal de frecuencia intermedia (FI). El amplificador IF que se muestra en la figura solo permite la frecuencia intermedia,$f_l\pm f_d$ y lo amplifica.
Detector - Detecta la señal, que tiene frecuencia Doppler, $f_d$.
Doppler Amplifier - Como sugiere el nombre, el amplificador Doppler amplifica la señal, que tiene frecuencia Doppler, $f_d$.
Indicator - Indica la información relacionada con la velocidad relativa y si el objetivo es entrante o saliente.
Los radares Doppler CW dan una medición precisa de relative velocities. Por lo tanto, estos se utilizan principalmente cuando la información de velocidad es más importante que el rango real.
Si el radar Doppler CW usa la modulación de frecuencia, ese radar se llama FMCW Doppler Radar o simplemente, FMCW Radar. También se denomina radar de frecuencia de onda continua modulada o radar CWFM. Mide no solo la velocidad del objetivo, sino también la distancia del objetivo al radar.
Diagrama de bloques del radar FMCW
El radar FMCW se utiliza principalmente como altímetro de radar para medir la altura exacta mientras aterriza la aeronave. La siguiente figura muestra elblock diagram del radar FMCW -

FMCW Radarcontiene dos Antenas - Antena transmisora y Antena receptora como se muestra en la figura. La antena transmisora transmite la señal y la antena receptora recibe la señal de eco.
El diagrama de bloques del radar FMCW es similar al diagrama de bloques del radar CW. Contiene pocos bloques modificados y algunos otros bloques además de los bloques que están presentes en el diagrama de bloques de CW Radar. losfunction de cada bloque de FMCW Radar se menciona a continuación.
FM Modulator - Produce una señal de frecuencia modulada (FM) con frecuencia variable, $f_o\left (t \right )$ y se aplica al transmisor FM.
FM Transmitter- Transmite la señal FM con la ayuda de la antena transmisora. La salida del transmisor FM también está conectada a Mixer-I.
Local Oscillator- En general, el oscilador local se utiliza para producir una señal de RF. Pero, aquí se usa para producir una señal que tiene una frecuencia intermedia,$f_{IF}$. La salida del oscilador local está conectada tanto al mezclador-I como al detector balanceado.
Mixer-I- El mezclador puede producir tanto la suma como la diferencia de las frecuencias que se le aplican. Las señales que tienen frecuencias de$f_o\left (t \right )$ y $f_{IF}$se aplican a Mixer-I. Entonces, el Mixer-I producirá la salida con frecuencia$f_o\left (t \right )+f_{IF}$ o $f_o\left (t \right )-f_{IF}$.
Side Band Filter- Permite solo frecuencias de banda lateral, es decir, frecuencias de banda lateral superior o frecuencias de banda lateral inferior. El filtro de banda lateral que se muestra en la figura produce solo una frecuencia de banda lateral inferior. es decir,$f_o\left (t \right )-f_{IF}$.
Mixer-II- El mezclador puede producir tanto la suma como la diferencia de las frecuencias que se le aplican. Las señales que tienen frecuencias de$f_o\left (t \right )-f_{IF}$ y $f_o\left (t-T \right )$se aplican a Mixer-II. Entonces, el Mixer-II producirá la salida con frecuencia$f_o\left (t-T \right )+f_o\left (t \right )-f_{IF}$ o $f_o\left (t-T \right )-f_o\left (t \right )+f_{IF}$.
IF Amplifier- El amplificador de FI amplifica la señal de frecuencia intermedia (FI). El amplificador de FI que se muestra en la figura amplifica la señal que tiene una frecuencia de$f_o\left (t-T \right )-f_o\left (t \right )+f_{IF}$. Esta señal amplificada se aplica como entrada al detector balanceado.
Balanced Detector - Se utiliza para producir la señal de salida con una frecuencia de $f_o\left (t-T \right )-f_o\left (t \right )$ de las dos señales de entrada aplicadas, que tienen frecuencias de $f_o\left (t-T \right )-f_o\left (t \right )+f_{IF}$ y $f_{IF}$. La salida del detector equilibrado se aplica como entrada al amplificador de baja frecuencia.
Low Frequency Amplifier- Amplifica la salida del detector balanceado al nivel requerido. La salida del amplificador de baja frecuencia se aplica tanto al contador de frecuencia conmutada como al contador de frecuencia media.
Switched Frequency Counter - Es útil para obtener el valor de la velocidad Doppler.
Average Frequency Counter - Es útil para obtener el valor de Rango.
Si el radar se utiliza para detectar el objetivo móvil, el radar debería recibir solo la señal de eco debida a ese objetivo móvil. Esta señal de eco es la deseada. Sin embargo, en aplicaciones prácticas, el radar recibe las señales de eco debidas a objetos estacionarios además de la señal de eco debida a ese objetivo móvil.
Las señales de eco debidas a objetos estacionarios (lugares) como la tierra y el mar se denominan cluttersporque estas son señales no deseadas. Por lo tanto, tenemos que elegir el radar de tal manera que considere solo la señal de eco debido al objetivo móvil pero no los ecos parásitos.
Para este propósito, Radar utiliza el principio del efecto Doppler para distinguir los objetivos no estacionarios de los objetos estacionarios. Este tipo de radar se llama radar indicador de objetivo móvil o simplemente,MTI Radar.
De acuerdo a Doppler effect, la frecuencia de la señal recibida aumentará si el objetivo se mueve hacia la dirección del radar. De manera similar, la frecuencia de la señal recibida disminuirá si el objetivo se aleja del radar.
Tipos de radares MTI
Podemos clasificar los radares MTI en los siguientes two types basado en el tipo de transmisor que se ha utilizado.
- Radar MTI con transmisor amplificador de potencia
- Radar MTI con transmisor de oscilador de potencia
Ahora, hablemos de estos dos radares MTI uno por uno.
Radar MTI con transmisor amplificador de potencia
MTI Radar utiliza una sola antena para la transmisión y recepción de señales con la ayuda de Duplexer. losblock diagram del radar MTI con transmisor de amplificador de potencia se muestra en la siguiente figura.
los function de cada bloque de radar MTI con transmisor de amplificador de potencia se menciona a continuación.
Pulse Modulator - Produce una señal modulada por pulsos y se aplica al amplificador de potencia.
Power Amplifier - Amplifica los niveles de potencia de la señal modulada por pulsos.
Local Oscillator - Produce una señal con frecuencia estable. $f_l$. Por lo tanto, también se denomina oscilador local estable. La salida del oscilador local se aplica a Mixer-I y Mixer-II.
Coherent Oscillator - Produce una señal que tiene una frecuencia intermedia, $f_c$. Esta señal se utiliza como señal de referencia. La salida del oscilador coherente se aplica tanto al mezclador-I como al detector de fase.
Mixer-I- El mezclador puede producir la suma o la diferencia de las frecuencias que se le aplican. Las señales que tienen frecuencias de$f_l$ y $f_c$se aplican a Mixer-I. Aquí, el Mixer-I se utiliza para producir la salida, que tiene la frecuencia$f_l+f_c$.
Duplexer- Es un interruptor de microondas, que conecta la antena a la sección del transmisor o la sección del receptor según el requisito. La antena transmite la señal que tiene frecuencia.$f_l+f_c$cuando el duplexor conecta la antena al amplificador de potencia. De manera similar, Antenna recibe la señal con una frecuencia de$f_l+f_c\pm f_d$ cuando el duplexor conecta la antena a Mixer-II.
Mixer-II- El mezclador puede producir la suma o la diferencia de las frecuencias que se le aplican. Las señales que tienen frecuencias$f_l+f_c\pm f_d$ y $f_l$se aplican a Mixer-II. Aquí, el Mixer-II se utiliza para producir la salida, que tiene la frecuencia$f_c\pm f_d$.
IF Amplifier- El amplificador de FI amplifica la señal de frecuencia intermedia (FI). El amplificador de FI que se muestra en la figura amplifica la señal que tiene frecuencia$f_c+f_d$. Esta señal amplificada se aplica como entrada al detector de fase.
Phase Detector - Se utiliza para producir la señal de salida con frecuencia. $f_d$ de las dos señales de entrada aplicadas, que tienen las frecuencias de $f_c+f_d$ y $f_c$. La salida del detector de fase se puede conectar al cancelador de línea de retardo.
Radar MTI con transmisor de oscilador de potencia
El diagrama de bloques de MTI Radar con transmisor de oscilador de potencia es similar al diagrama de bloques de MTI Radar con transmisor de amplificador de potencia. Los bloques correspondientes a la sección del receptor serán los mismos en ambos diagramas de bloques. Considerando que, los bloques correspondientes a la sección del transmisor pueden diferir en ambos diagramas de bloques.
los block diagram del radar MTI con transmisor de oscilador de potencia se muestra en la siguiente figura.
Como se muestra en la figura, MTI Radar utiliza una antena única tanto para la transmisión como para la recepción de señales con la ayuda de Duplexer. losoperation del radar MTI con transmisor de oscilador de potencia se menciona a continuación.
La salida de Magnetron Oscillator y la salida de Local Oscillator se aplican a Mixer-I. Esto producirá aún más unaIF signal, cuya fase está directamente relacionada con la fase de la señal transmitida.
La salida de Mixer-I se aplica al oscilador coherente. Por lo tanto, la fase de salida del oscilador coherente serálockeda la fase de la señal IF. Esto significa que la fase de salida del oscilador coherente también se relacionará directamente con la fase de la señal transmitida.
Por lo tanto, la salida del oscilador coherente se puede utilizar como señal de referencia para comparar la señal de eco recibida con la señal transmitida correspondiente utilizando phase detector.
Las tareas anteriores se repetirán para cada nueva señal transmitida.
Sistemas de radar: canceladores de línea de retardo
En este capítulo, aprenderemos sobre los canceladores de línea de retardo en sistemas de radar. Como sugiere el nombre, la línea de retraso introduce una cierta cantidad de retraso. Por lo tanto, la línea de retardo se utiliza principalmente en el cancelador de línea de retardo para introducir undelay del tiempo de repetición del pulso.
Delay line cancelleres un filtro que elimina los componentes de CC de las señales de eco recibidas de objetivos estacionarios. Esto significa que permite los componentes de CA de las señales de eco recibidas de objetivos no estacionarios, es decir, objetivos en movimiento.
Tipos de canceladores de línea de retardo
Los canceladores de línea de retraso se pueden clasificar en los siguientes two types basado en el número de líneas de retardo que están presentes en él.
- Cancelador de línea de retardo único
- Cancelador de línea de doble retardo
En las secciones siguientes, analizaremos más sobre estos dos canceladores de línea de retraso.
Cancelador de línea de retardo único
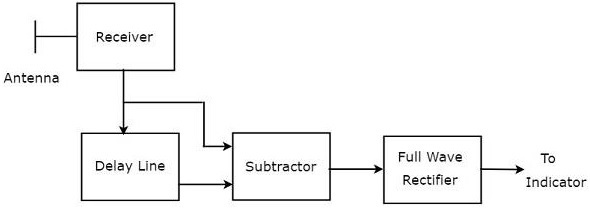
La combinación de una línea de retardo y un restador se conoce como cancelador de línea de retardo. También se denomina cancelador de línea de retardo único. losblock diagram del receptor MTI con cancelador de línea de retardo simple se muestra en la siguiente figura.
Podemos escribir el mathematical equation de la señal de eco recibida después del efecto Doppler como -
$$V_1=A\sin\left [ 2\pi f_dt-\phi_0 \right ]\:\:\:\:\:Equation\:1$$
Dónde,
A es la amplitud de la señal de video
$f_d$ es la frecuencia Doppler
$\phi_o$ es el cambio de fase y es igual a $4\pi f_tR_o/C$
Obtendremos el output of Delay line canceller, por reemplazo $t$ por $t-T_P$ en la ecuación 1.
$$V_2=A\sin\left [ 2\pi f_d\left ( t-T_P\right )-\phi_0 \right ]\:\:\:\:\:Equation\:2$$
Dónde,
$T_P$ es el tiempo de repetición del pulso
Obtendremos el subtractor output restando la Ecuación 2 de la Ecuación 1.
$$V_1-V_2=A\sin\left [ 2\pi f_dt-\phi_0 \right ]-A\sin\left [ 2\pi f_d\left ( t-T_P\right )-\phi_0 \right ]$$
$$\Rightarrow V_1-V_2=2A\sin\left [ \frac{ 2\pi f_dt-\phi_0-\left [ 2\pi f_d\left ( t-T_P \right )-\phi_0 \right ]}{2}\right ]\cos\left [ \frac{ 2\pi f_dt-\phi_o+2\pi f_d\left ( t-T_P \right )-\phi_0 }{2}\right ]$$
$$V_1-V_2=2A\sin\left [ \frac{2\pi f_dT_P}{2} \right ]\cos\left [ \frac{2\pi f_d\left ( 2t-T_P \right )-2\phi_0}{2} \right ]$$
$$\Rightarrow V_1-V_2=2A\sin\left [ \pi f_dT_p \right ]\cos\left [ 2\pi f_d\left ( t-\frac{T_P}{2} \right )-\phi_0 \right ]\:\:\:\:\:Equation\:3$$
La salida del restador se aplica como entrada al rectificador de onda completa. Por lo tanto, la salida del rectificador de onda completa se ve como se muestra en la siguiente figura. No es nada más que elfrequency response del cancelador de línea de retardo único.

De la Ecuación 3, podemos observar que la respuesta de frecuencia del cancelador de línea de retardo único se vuelve cero, cuando $\pi f_dT_P$ es igual a integer multiples of $\pi$ Esto significa, $\pi f_dT_P$ es igual a $n\pi$ Matemáticamente, se puede escribir como
$$\pi f_dT_P=n\pi$$
$$\Rightarrow f_dT_P=n$$
$$\Rightarrow f_d=\frac{n}{T_P}\:\:\:\:\:Equation\:4$$
De la Ecuación 4, podemos concluir que la respuesta de frecuencia del cancelador de línea de retardo único se vuelve cero, cuando la frecuencia Doppler $f_d$ es igual a múltiplos enteros del recíproco del tiempo de repetición del pulso $T_P$.
Conocemos la siguiente relación entre el tiempo de repetición del pulso y la frecuencia de repetición del pulso.
$$f_d=\frac{1}{T_P}$$
$$\Rightarrow \frac{1}{T_P}=f_P\:\:\:\:\:Equation\:5$$
Obtendremos la siguiente ecuación, sustituyendo la Ecuación 5 en la Ecuación 4.
$$\Rightarrow f_d=nf_P\:\:\:\:\:Equation\:6$$
De la Ecuación 6, podemos concluir que la respuesta de frecuencia del cancelador de línea de retardo único se vuelve cero, cuando la frecuencia Doppler, $f_d$ es igual a múltiplos enteros de frecuencia de repetición de pulsos $f_P$.
Velocidades ciegas
De lo que aprendimos hasta ahora, el cancelador de línea de retardo simple elimina los componentes de CC de las señales de eco recibidas de objetivos estacionarios, cuando $n$es igual a cero. Además de eso, también elimina los componentes de CA de las señales de eco recibidas de objetivos no estacionarios, cuando la frecuencia Doppler$f_d$ es igual a entero (other than zero) múltiplos de frecuencia de repetición de pulsos $f_P$.
Entonces, las velocidades relativas para las cuales la respuesta de frecuencia del cancelador de línea de retardo único se vuelve cero se llaman blind speeds. Matemáticamente, podemos escribir la expresión de velocidad ciega$v_n$ como -
$$v_n=\frac{n\lambda}{2T_P}\:\:\:\:\:Equation\:7$$
$$\Rightarrow v_n=\frac{n\lambda f_P}{2}\:\:\:\:\:Equation\:8$$
Dónde,
$n$ es un número entero y es igual a 1, 2, 3 y así sucesivamente
$\lambda$ es la longitud de onda operativa
Problema de ejemplo
Un radar MTI opera a una frecuencia de $6GHZ$ con una frecuencia de repetición de pulsos de $1KHZ$. Encuentra el primero, segundo y terceroblind speeds de este radar.
Solución
Dado,
La frecuencia de funcionamiento del radar MTI, $f=6GHZ$
Frecuencia de repetición de pulsos, $f_P=1KHZ$.
A continuación se muestra la fórmula para operating wavelength $\lambda$ en términos de frecuencia de operación, f.
$$\lambda=\frac{C}{f}$$
Sustituir, $C=3\times10^8m/sec$ y $f=6GHZ$ en la ecuación anterior.
$$\lambda=\frac{3\times10^8}{6\times10^9}$$
$$\Rightarrow \lambda=0.05m$$
Entonces el operating wavelength $\lambda$ es igual a $0.05m$, cuando la frecuencia de funcionamiento f es $6GHZ$.
Sabemos lo siguiente formula for blind speed.
$$v_n=\frac{n\lambda f_p}{2}$$
Sustituyendo, $n$= 1,2 y 3 en la ecuación anterior, obtendremos las siguientes ecuaciones para la primera, segunda y tercera velocidades ciegas respectivamente.
$$v_1=\frac{1\times \lambda f_p}{2}=\frac{\lambda f_p}{2}$$
$$v_2=\frac{2\times \lambda f_p}{2}=2\left ( \frac{\lambda f_p}{2} \right )=2v_1$$
$$v_3=\frac{3\times \lambda f_p}{2}=3\left ( \frac{\lambda f_p}{2} \right )=3v_1$$
Substitute los valores de $\lambda$ y $f_P$ en la ecuación de la primera velocidad ciega.
$$v_1=\frac{0.05\times 10^3}{2}$$
$$\Rightarrow v_1=25m/sec$$
Por lo tanto, los first blind speed $v_1$ es igual a $25m/sec$ para las especificaciones dadas.
Obtendremos los valores de second & third blind speeds como $50m/sec$Y $75m/sec$ respectivamente sustituyendo el valor de ð ?? '£ 1 en las ecuaciones de la segunda y tercera velocidades ciegas.
Cancelador de línea de doble retardo
Sabemos que un cancelador de línea de retardo único consta de una línea de retardo y un restador. Si dos de estos canceladores de línea de retardo se conectan en cascada, esa combinación se denomina cancelador de línea de retardo doble. losblock diagram del cancelador de línea de doble retardo se muestra en la siguiente figura.

Dejar $p\left ( t \right )$ y $q\left ( t \right )$ser la entrada y salida del primer cancelador de línea de retardo. Obtendremos la siguiente relación matemática defirst delay line canceller.
$$q\left ( t \right )=p\left ( t \right )-p\left ( t-T_P \right )\:\:\:\:\:Equation\:9$$
La salida del primer cancelador de línea de retardo se aplica como entrada al segundo cancelador de línea de retardo. Por lo tanto,$q\left ( t \right )$será la entrada del segundo cancelador de línea de retardo. Dejar$r\left ( t \right )$ser la salida del segundo cancelador de línea de retardo. Obtendremos la siguiente relación matemática delsecond delay line canceller.
$$r\left ( t \right )=q\left ( t \right )-q\left ( t-T_P \right )\:\:\:\:\:Equation\:10$$
Reemplazar $t$ por $t-T_P$ en la ecuación 9.
$$q\left ( t-T_P \right )=p\left ( t-T_P \right )-p\left ( t-T_P-T_P \right )$$
$$q\left ( t-T_P \right )=p\left ( t-T_P \right )-p\left ( t-2T_P \right )\:\:\:\:\:Equation\:11$$
Substitute, Ecuación 9 y Ecuación 11 en Ecuación 10.
$$r\left ( t \right )=p\left ( t \right )-p\left ( t-T_P \right )-\left [ p\left ( t-T_P \right )-p\left ( t-2T_P \right ) \right ]$$
$$\Rightarrow r\left ( t \right )=p\left ( t \right )-2p\left ( t-T_P \right )+p\left ( t-2T_P \right )\:\:\:\:\:Equation\:12$$
los advantagedel cancelador de línea de doble retardo es que rechaza el desorden en general. La salida de dos canceladores de línea de retardo, que están en cascada, será igual al cuadrado de la salida del cancelador de línea de retardo único.
Por lo tanto, la magnitud de salida del cancelador de línea de doble retardo, que está presente en el receptor de radar MTI, será igual a $4A^2\left ( \sin\left [ \pi f_dT_P \right ] \right )^2$.

Las características de respuesta de frecuencia tanto del cancelador de línea de retardo doble como de la combinación en cascada de dos canceladores de línea de retardo son las mismas. losadvantage del cancelador de línea de retardo en el dominio del tiempo es que se puede operar para todos los rangos de frecuencia.
Sistemas de radar: radar de seguimiento
El radar, que se utiliza para rastrear la ruta de uno o más objetivos, se conoce como Tracking Radar. En general, realiza las siguientes funciones antes de iniciar la actividad de seguimiento.
- Detección de objetivos
- Alcance del objetivo
- Encontrar ángulos de elevación y acimut
- Encontrar el cambio de frecuencia Doppler
Entonces, Tracking Radar rastrea el objetivo mediante el seguimiento de uno de los tres parámetros: rango, ángulo, cambio de frecuencia Doppler. La mayoría de los radares de seguimiento utilizanprinciple of tracking in angle. Ahora, analicemos qué es el seguimiento angular.
Seguimiento angular
Los rayos de lápiz de la antena de radar realizan un seguimiento en ángulo. El eje de la antena de radar se considera la dirección de referencia. Si la dirección del objetivo y la dirección de referencia no es la misma, entonces habráangular error, que no es más que la diferencia entre las dos direcciones.
Si la señal de error angular se aplica a un sistema de control de servo, moverá el eje de la antena de radar hacia la dirección del objetivo. Tanto el eje de la antena de radar como la dirección del objetivocoincidecuando el error angular es cero. Existe un mecanismo de retroalimentación en el radar de seguimiento, que funciona hasta que el error angular se vuelve cero.
Los siguientes son los two techniques, que se utilizan en seguimiento angular.
- Lobulación secuencial
- Escaneo cónico
Ahora, analicemos estas dos técnicas una por una.
Lobulación secuencial
Si los haces de la antena se cambian entre dos patrones alternativamente para rastrear el objetivo, entonces se llama sequential lobing. También se denomina conmutación secuencial y conmutación de lóbulos. Esta técnica se utiliza para encontrar el error angular en una coordenada. Da los detalles de la magnitud y la dirección del error angular.
La siguiente figura muestra un ejemplo de lóbulos secuenciales en polar coordinates.
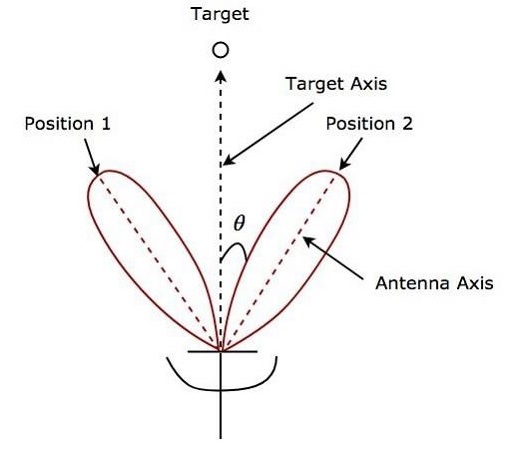
Como se muestra en la figura, los haces de antena cambian entre la Posición 1 y la Posición 2 alternativamente. El error angular θ se indica en la figura anterior. Los lóbulos secuenciales dan la posición del objetivo con alta precisión. Esta es la principaladvantage de lóbulos secuenciales.
Escaneo cónico
Si el rayo de la antena gira continuamente para rastrear un objetivo, entonces se llama conical scanning. La modulación de exploración cónica se utiliza para encontrar la posición del objetivo. La siguiente figura muestra un ejemplo de escaneo cónico.

Squint anglees el ángulo entre el eje del haz y el eje de rotación y se muestra en la figura anterior. La señal de eco obtenida del objetivo se modula a una frecuencia igual a la frecuencia a la que gira el haz de la antena.
El ángulo entre la dirección del objetivo y el eje de rotación determina la amplitude of the modulated signal. Por lo tanto, la modulación de exploración cónica debe extraerse de la señal de eco y luego aplicarse al sistema de servocontrol, que mueve el eje del haz de la antena hacia la dirección del objetivo.
Sistemas de radar: parámetros de la antena
Un Antenna o Aerial es un transductor, que convierte la energía eléctrica en ondas electromagnéticas y viceversa.
Una antena tiene los siguientes parámetros:
- Directivity
- Eficiencia de apertura
- Eficiencia de la antena
- Gain
Ahora, analicemos estos parámetros en detalle:
Directividad
De acuerdo con la definición estándar, “La relación entre la intensidad máxima de radiación de la antena en cuestión y la intensidad de radiación de una antena isotrópica o de referencia, que irradia la misma potencia total se denomina Directivity. "
Aunque una antena irradia energía, la dirección en la que irradia importa es de gran importancia. La antena en estudio se denominasubject Antenna. Su intensidad de radiación se enfoca en una dirección particular, mientras está transmitiendo o recibiendo. Por lo tanto, se dice que la antena tiene su directividad en esa dirección particular.
La relación entre la intensidad de la radiación en una dirección determinada de una antena y la intensidad de la radiación promediada en todas las direcciones se denomina Directivity.
Si no se especifica esa dirección en particular, entonces la dirección en la que se observa la intensidad máxima se puede tomar como la directividad de esa antena.
La directividad de una antena no isotrópica es igual a la relación entre la intensidad de la radiación en una dirección dada y la intensidad de la radiación de la fuente isotrópica.
Mathematically, podemos escribir la expresión de Directividad como -
$$Directivity=\frac{U_{Max}\left (\theta,\phi\right )}{U_0}$$
Dónde,
$U_{Max}\left (\theta,\phi\right )$ es la máxima intensidad de radiación de la antena del sujeto
$U_0$ es la intensidad de radiación de una antena isotrópica.
Eficiencia de apertura
Según la definición estándar, “Aperture efficiency de una antena es la relación entre el área de radiación efectiva (o área efectiva) y el área física de la apertura ".
Una antena irradia energía a través de una abertura. Esta radiación debería ser eficaz con pérdidas mínimas. También debe tenerse en cuenta el área física de la apertura, ya que la eficacia de la radiación depende del área de la apertura, físicamente en la Antena.
Mathematically, podemos escribir la expresión de eficiencia de apertura $\epsilon_A$ como
$$\epsilon _A=\frac{A_{eff}}{A_p}$$
Dónde,
$A_{eff}$ es el área efectiva
$A_P$ es el area fisica
Eficiencia de la antena
Según la definición estándar, “Antenna Efficiency es la relación entre la potencia radiada de la antena y la potencia de entrada aceptada por la antena ".
Cualquier antena está diseñada para irradiar potencia con pérdidas mínimas, para una entrada determinada. La eficiencia de una antena explica cuánto puede una antena entregar su salida de manera efectiva con pérdidas mínimas en la línea de transmisión. También es llamadoRadiation Efficiency Factor de la Antena.
Mathematically, podemos escribir la expresión para la eficiencia de la antena 𝜂𝑒 como -
$$\eta _e=\frac{P_{Rad}}{P_{in}}$$
Dónde,
$P_{Rad}$ es la cantidad de energía irradiada
$P_{in}$ es la potencia de entrada para la antena
Ganancia
Según la definición estándar, “Gain de una antena es la relación entre la intensidad de la radiación en una dirección dada y la intensidad de la radiación que se obtendría si la potencia aceptada por la antena se irradiara isotrópicamente ".
Simplemente, Gainde una antena tiene en cuenta la directividad de la antena junto con su rendimiento efectivo. Si la potencia aceptada por la Antena fue irradiada isotrópicamente (es decir, en todas las direcciones), entonces la intensidad de radiación que obtenemos puede tomarse como referencial.
El termino Antenna gain describe cuánta potencia se transmite en la dirección del pico de radiación a la de una fuente isotrópica.
La ganancia generalmente se mide en dB.
A diferencia de la directividad, la ganancia de antena también tiene en cuenta las pérdidas que se producen y, por tanto, se centra en la eficiencia.
Mathematically, podemos escribir la expresión de Antenna Gain $G$ como -
$$G=\eta_eD$$
Dónde,
$\eta_e$ es la eficiencia de la antena
$D$ es la directividad de la antena
Sistemas de radar - Antenas de radar
En este capítulo, aprendamos sobre las antenas, que son útiles en la comunicación por radar. Podemos clasificar las Antenas Radar en las siguientestwo types basado en la estructura física.
- Antenas reflectoras parabólicas
- Antenas de lente
En las secciones siguientes, analizaremos los dos tipos de antenas en detalle.
Antenas reflectoras parabólicas
Las antenas reflectoras parabólicas son las antenas de microondas. El conocimiento del reflector parabólico es esencial para comprender en profundidad el funcionamiento de las antenas.
Principio de funcionamiento
Parabola no es más que el lugar geométrico de los puntos, que se mueven de tal manera que su distancia desde el punto fijo (llamado foco) más su distancia desde una línea recta (llamada directriz) es constante.
La siguiente figura muestra el geometry of parabolic reflector. Los puntos F y V son el foco (se da alimentación) y el vértice respectivamente. La línea que une F y V es el eje de simetría.$P_1Q_1, P_2Q_2$ y $P_3Q_3$son los rayos reflejados. La línea L representa la directriz en la que se encuentran los puntos reflejados (para decir que son colineales).

Como se muestra en la figura, la distancia entre F y L es constante con respecto a las ondas que se están enfocando. La onda reflejada forma un frente de onda colimado, fuera de la forma parabólica. La relación entre la distancia focal y el tamaño de apertura (es decir,$f/D$ ) que se conoce como “f over D ratio”. Es un parámetro importante del reflector parabólico y su valor varía de0.25 to 0.50.
los law of reflectionestablece que el ángulo de incidencia y el ángulo de reflexión son iguales. Esta ley, cuando se usa junto con una parábola, ayuda a enfocar el haz. La forma de la parábola cuando se usa con el propósito de reflejar ondas, exhibe algunas propiedades de la parábola, que son útiles para construir una Antena, usando las ondas reflejadas.
Propiedades de la parábola
A continuación se muestran las diferentes propiedades de Parabola:
Todas las ondas que se originan en el foco se reflejan en el eje parabólico. Por tanto, todas las ondas que llegan a la apertura están en fase.
Como las ondas están en fase, el haz de radiación a lo largo del eje parabólico será fuerte y concentrado.
Siguiendo estos puntos, los reflectores parabólicos ayudan a producir una alta directividad con un ancho de haz más estrecho.
Construcción y funcionamiento de un reflector parabólico
Si se utiliza una antena reflectora parabólica para transmitting a signal, la señal de la alimentación sale de una Antena dipolo o Antena de cuerno, para enfocar la onda en la parábola. Significa que las ondas salen del punto focal y golpean el reflector paraboloide. Esta onda ahora se refleja como un frente de onda colimado, como se discutió anteriormente, para ser transmitida.
La misma antena se utiliza como receiver. Cuando la onda electromagnética golpea la forma de la parábola, la onda se refleja en el punto de alimentación. La Antena dipolo o la Antena de bocina, que actúa como la Antena receptora en su alimentación, recibe esta señal, para convertirla en señal eléctrica y reenviarla al circuito del receptor.
La ganancia del paraboloide es función de la relación de apertura. $D/\lambda$. El poder irradiado eficaz(ERP) de una antena es la multiplicación de la potencia de entrada alimentada a la antena y su ganancia de potencia.
Por lo general, se utiliza una antena de bocina guía de ondas como radiador de alimentación para la antena reflectora paraboloide. Junto con esta técnica, tenemos los siguientes dos tipos de alimentaciones dadas a la Antena reflectora paraboloide.
- Pienso Cassegrain
- Pienso gregoriano
Pienso Cassegrain
En este tipo, la alimentación se ubica en el vértice del paraboloide, a diferencia del reflector parabólico. Un reflector de forma convexa, que actúa como hiperboloide, se coloca frente a la alimentación de la Antena. También se conoce comosecondary hyperboloid reflectoro subreflector. Se coloca de tal manera que uno de sus focos coincida con el foco del paraboloide. Por tanto, la onda se refleja dos veces.
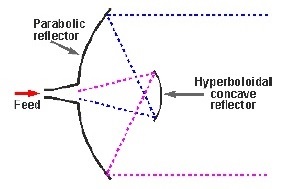
La figura anterior muestra el modelo de trabajo del pienso cassegrain.
Pienso gregoriano
El tipo de alimentación donde hay un par de ciertas configuraciones y donde el ancho del haz de alimentación aumenta progresivamente mientras las dimensiones de la antena se mantienen fijas se conoce como Gregorian feed. Aquí, el hiperboloide de forma convexa de Cassegrain se reemplaza por un reflector paraboloide de forma cóncava, que por supuesto es de menor tamaño.
Estos reflectores de alimentación gregoriana se pueden utilizar de las siguientes cuatro formas:
Sistemas gregorianos que utilizan reflector subreflector elipsoidal en focos F1.
Sistemas gregorianos que utilizan reflector subreflector elipsoidal en focos F2.
Sistemas Cassegrain que utilizan subreflector hiperboloide (convexo).
Sistemas Cassegrain que utilizan subreflector hiperboloide (cóncavo pero con la alimentación muy próxima).
Entre los diferentes tipos de Antenas reflectoras, los reflectores parabólicos simples y los reflectores parabólicos de alimentación Cassegrain son los más utilizados.
Antenas de lente
Las antenas de lente utilizan la superficie curva tanto para la transmisión como para la recepción de señales. Estas antenas están compuestas de vidrio, donde se siguen las propiedades convergentes y divergentes de la lente. losfrequency range de uso de Lens Antenna comienza en 1 GHz pero su uso es mayor en 3 GHz and above.
Se requiere un conocimiento de Lens para comprender el funcionamiento de Lens Antenna en profundidad. Recuerde que una lente de vidrio normal funciona en elprinciple of refraction.
Construcción y funcionamiento de la antena de lente
Si se supone que una fuente de luz está presente en un punto focal de una lente, que está a una distancia focal de la lente, entonces los rayos atraviesan la lente como colimados o parallel rays en el frente de onda del avión.
Hay dos fenómenos que ocurren cuando los rayos caen desde diferentes lados de una lente. Se dan aquí:
Los rayos que pasan por el centro del Lente son menos refractados que los rayos que pasan por los bordes del Lente. Todos los rayos se envían en paralelo al frente de onda plano. Este fenómeno de Lens se llamaDivergence.
El mismo procedimiento se invierte si se envía un haz de luz del lado derecho al lado izquierdo de la misma lente. Luego, el rayo se refracta y se encuentra en un punto llamado punto focal, a una distancia focal de la lente. Este fenómeno se llamaConvergence.
El siguiente diagrama nos ayudará a comprender mejor el fenómeno.
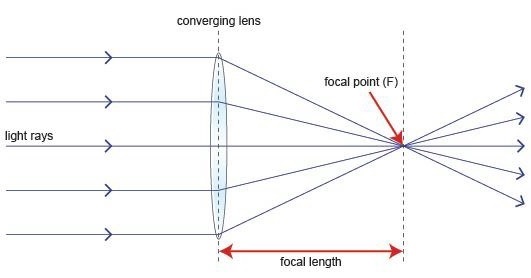
los ray diagramrepresenta el punto focal y la distancia focal desde la fuente hasta la lente. Los rayos paralelos obtenidos también se denominan rayos colimados.
En la figura anterior, la fuente en el punto focal, a una distancia focal de la lente, está colimada en el frente de onda plana. Este fenómeno se puede revertir, lo que significa que la luz, si se envía desde el lado izquierdo, converge en el lado derecho de la lente.
Es por esto reciprocity, la lente se puede utilizar como antena, ya que el mismo fenómeno ayuda a utilizar la misma antena tanto para la transmisión como para la recepción.
Para lograr las propiedades de enfoque a frecuencias más altas, el índice de refracción debe ser menor que la unidad. Cualquiera que sea el índice de refracción, el objetivo de Lens es enderezar la forma de onda. En base a esto, se desarrollan las lentes de plano E y plano H, que también retrasan o aceleran el frente de onda.
Sistemas de radar: receptor de filtro combinado
Si un filtro produce una salida de tal manera que maximiza la relación entre la potencia máxima de salida y la potencia de ruido media en su respuesta de frecuencia, entonces ese filtro se llama Matched filter.
Este es un criterio importante, que se tiene en cuenta al diseñar cualquier receptor de radar. En este capítulo, analicemos la función de respuesta de frecuencia del filtro emparejado y la respuesta de impulso del filtro emparejado.
Función de respuesta de frecuencia del filtro emparejado
La respuesta de frecuencia del filtro emparejado será proporcional al complejo conjugado del espectro de la señal de entrada. Matemáticamente, podemos escribir la expresión parafrequency response function, $H\left (f\right )$ del filtro Coincidido como -
$$H\left (f\right )=G_aS^\ast\left (f\right )e^{-j2\pi ft_1}\:\:\:\:\:Equation\:1$$
Dónde,
$G_a$ es la ganancia máxima del filtro emparejado
$S\left (f\right )$ es la transformada de Fourier de la señal de entrada, $s\left (t\right )$
$S^\ast\left (f\right )$ es el complejo conjugado de $S\left (f\right )$
$t_1$ es el instante de tiempo en el que la señal observada es máxima
En general, el valor de $G_a$se considera como uno. Obtendremos la siguiente ecuación sustituyendo$G_a=1$ en la ecuación 1.
$$H\left (f\right )=S^\ast\left (f\right )e^{-j2\pi ft_1}\:\:\:\:\:Equation\:2$$
La función de respuesta de frecuencia, $H\left (f\right )$ del filtro Coincidido tiene el magnitude de $S^\ast\left (f\right )$ y phase angle de $e^{-j2\pi ft_1}$, que varía uniformemente con la frecuencia.
Respuesta de impulso del filtro emparejado
En time domain, obtendremos la salida, $h(t)$ del receptor de filtro emparejado aplicando la transformada de Fourier inversa de la función de respuesta de frecuencia, $H(f)$.
$$h\left (t\right )=\int_{-\infty }^{\infty }H\left (f\right )e^{-j2\pi ft_1}df\:\:\:\:\:Equation\:3$$
Substitute, Ecuación 1 en Ecuación 3.
$$h\left (t\right )=\int_{-\infty }^{\infty }\lbrace G_aS^\ast\left (f\right )e^{-j2\pi ft_1}\rbrace e^{j2\pi ft}df$$
$$\Rightarrow h\left (t\right )=\int_{-\infty }^{\infty }G_aS^\ast\left (f\right )e^{-j2\pi f\left (t_1-t\right )}df\:\:\:\:\:Equation\:4$$
Conocemos la siguiente relación.
$$S^\ast\left (f\right )=S\left (-f\right )\:\:\:\:\:Equation\:5$$
Substitute, Ecuación 5 en Ecuación 4.
$$h\left (t\right )=\int_{-\infty }^{\infty }G_aS(-f)e^{-j2\pi f\left (t_1-t\right )}df$$
$$\Rightarrow h\left (t\right )=\int_{-\infty }^{\infty }G_aS^\left (f\right )e^{j2\pi f\left (t_1-t\right )}df$$
$$\Rightarrow h\left (t\right )=G_as(t_1−t)\:\:\:\:\:Equation\:6$$
En general, el valor de $G_a$se considera como uno. Obtendremos la siguiente ecuación sustituyendo$G_a=1$ en la ecuación 6.
$$h(t)=s\left (t_1-t\right )$$
La ecuación anterior demuestra que la impulse response of Matched filter es la imagen especular de la señal recibida sobre un instante de tiempo $t_1$. Las siguientes figuras ilustran este concepto.


La señal recibida, $s\left (t\right )$ y la respuesta de impulso, $h\left (t\right )$ del filtro adaptado correspondiente a la señal, $s\left (t\right )$ se muestran en las figuras anteriores.
Sistemas de radar: pantallas de radar
Un instrumento electrónico, que se utiliza para mostrar los datos visualmente, se conoce como pantalla. Entonces, el instrumento electrónico que muestra la información sobre el objetivo de Radar visualmente se conoce comoRadar display. Muestra la información de la señal de eco visualmente en la pantalla.
Tipos de pantallas de radar
En esta sección, aprenderemos sobre los diferentes tipos de pantallas de radar. Las pantallas de radar se pueden clasificar en los siguientes tipos.
Un alcance
Es una pantalla de radar bidimensional. Las coordenadas horizontal y vertical representan el alcance y la amplitud del eco del objetivo, respectivamente. En A-Scope, tiene lugar la modulación de deflexión. Es más adecuado paramanually tracking Radar.
B-Scope
Es una pantalla de radar bidimensional. Las coordenadas horizontal y vertical representan el ángulo de acimut y el alcance del objetivo, respectivamente. En B-Scope, tiene lugar la modulación de intensidad. Es más adecuado paramilitary Radars.
Alcance C
Es una pantalla de radar bidimensional. Las coordenadas horizontal y vertical representan el ángulo de acimut y el ángulo de elevación respectivamente. En C-Scope, tiene lugar la modulación de intensidad.
D-Scope
Si el haz de electrones se desvía o el punto de intensidad modulada aparece en la pantalla del radar debido a la presencia del objetivo, entonces se conoce como señal intermitente. C-Scope se convierte en D-Scope, cuando las señales se extienden verticalmente para proporcionar la distancia.
Alcance electrónico
Es una pantalla de radar bidimensional. Las coordenadas horizontal y vertical representan la distancia y el ángulo de elevación respectivamente. En E-Scope, tiene lugar la modulación de intensidad.
F-Scope
Si la antena de radar apunta al objetivo, entonces F-Scope muestra el objetivo como un indicador luminoso centralizado. Entonces, los desplazamientos horizontal y vertical del blip representan los errores de puntería horizontal y vertical respectivamente.
G-Scope
Si la antena de radar apunta al objetivo, entonces G-Scope muestra el objetivo como un bip centralizado lateralmente. Los desplazamientos horizontal y vertical del blip representan los errores de puntería horizontal y vertical, respectivamente.
Alcance H
Es la versión modificada de B-Scope para proporcionar información sobre el ángulo de elevación del objetivo. Muestra el objetivo como dos señales, que están poco espaciadas. Esto se puede aproximar a una línea corta y brillante y la pendiente de esta línea será proporcional al seno del ángulo de elevación.
I-Scope
Si la antena de radar apunta al objetivo, I-Scope muestra el objetivo como un circle. El radio de este círculo será proporcional a la distancia del objetivo. Si la antena de radar apunta al objetivo de forma incorrecta, I-Scope muestra el objetivo como un segmento en lugar de un círculo. La longitud del arco de ese segmento será inversamente proporcional a la magnitud del error de puntería.
J-Scope
Es la versión modificada de A-Scope. Muestra el objetivo como una desviación radial desde la base de tiempo.
K-Scope
Es la versión modificada de A-Scope. Si la antena de radar apunta al objetivo, K-Scope muestra el objetivo como un par de deflexiones verticales, que tienen la misma altura. Si la antena de radar apunta al objetivo incorrectamente, habrá un error de apuntado. Entonces, la magnitud y la dirección del error de puntería depende de la diferencia entre las dos deflexiones verticales.
Alcance L
Si la antena de radar está dirigida al objetivo, entonces L-Scope muestra el objetivo como dos señales horizontales que tienen la misma amplitud. Una señal horizontal se encuentra a la derecha de la base de tiempo vertical central y la otra a la izquierda de la base de tiempo vertical central.
M-Scope
Es la versión modificada de A-Scope. Una señal de pedestal ajustable debe moverse a lo largo de la línea de base hasta que coincida con las desviaciones de la señal, que provienen de la posición horizontal del objetivo. De esta forma, se puede determinar la distancia del objetivo.
N-Scope
Es la versión modificada de K-Scope. Se utiliza una señal de pedestal ajustable para medir la distancia.
O-Scope
Es la versión modificada de A-Scope. Obtendremos O-Scope, al incluir una muesca ajustable en A-Scope para medir la distancia.
P-Scope
Es una pantalla de radar, que usa modulación de intensidad. Muestra la información de la señal de eco como vista en planta. El rango y el ángulo de acimut se muestran en coordenadas polares. Por lo tanto, se llamaPlan Position Indicator o la PPI display.
R-Scope
Es una pantalla de radar, que usa modulación de intensidad. Las coordenadas horizontal y vertical representan el rango y la altura del objetivo respectivamente. Por lo tanto, se llamaRange-Height Indicator o RHI display.
Sistemas de radar - Duplexores
En la comunicación bidireccional, si se supone que debemos usar la misma Antena tanto para la transmisión como para la recepción de las señales, entonces requerimos Duplexer. Duplexeres un interruptor de microondas, que conecta la antena a la sección del transmisor para la transmisión de la señal. Por lo tanto, el radar no puede recibir la señal durante el tiempo de transmisión.
Asimismo, conecta la Antena a la sección del receptor para la recepción de la señal. El radar no puede transmitir la señal durante el tiempo de recepción. De esta forma, Duplexer aísla las secciones del transmisor y del receptor.
Tipos de duplexores
En esta sección, aprenderemos sobre los diferentes tipos de duplexores. Podemos clasificar los Duplexers en los siguientesthree types.
- Duplexor tipo rama
- Duplexor equilibrado
- Circulador como duplexor
En las secciones siguientes, analizaremos los tipos de duplexores en detalle.
Duplexor tipo rama
El duplexor tipo rama consta de dos interruptores: interruptor de transmisión-recepción (TR) y interruptor de anti transmisión-recepción (ATR). La siguiente figura muestra elblock diagram de duplexor tipo rama -

Como se muestra en la figura, los dos interruptores, TR y ATR se colocan a una distancia de $\lambda/4$ de la línea de transmisión y ambos interruptores están separados por una distancia de $\lambda/4$. losworking de Duplexer tipo rama se menciona a continuación.
Durante transmission, tanto TR como ATR se verán como un circuito abierto de la línea de transmisión. Por lo tanto, la antena se conectará al transmisor a través de la línea de transmisión.
Durante reception, ATR se verá como un cortocircuito en la línea de transmisión. Por lo tanto, la antena se conectará al receptor a través de la línea de transmisión.
El duplexor tipo rama es adecuado solo para radares de bajo costo, ya que tiene menos capacidad de manejo de energía.
Duplexor equilibrado
Sabemos que un two-hole Directional Coupleres una unión de guía de ondas de 4 puertos que consta de una guía de ondas primaria y una guía de ondas secundaria. Hay dos pequeños agujeros, que serán comunes a esas dos guías de ondas.
El Duplexer Equilibrado consta de dos tubos TR. La configuración de Balanced Duplexer paratransmission El propósito se muestra en la siguiente figura.

La señal, que es producida por el transmisor, tiene que llegar a la Antena para que la Antena transmita esa señal durante el tiempo de transmisión. lossolid lines with arrow marks que se muestra en la figura anterior representan cómo la señal llega a la antena desde el transmisor.
Las líneas punteadas con marcas de flecha que se muestran en la figura anterior representan la señal que se escapa de los tubos Dual TR; esto alcanzará solo la carga correspondiente. Por lo tanto, no se ha llegado a ninguna señal al receptor.
La configuración de Balanced Duplexer para reception El propósito se muestra en la figura que se muestra a continuación.

Sabemos que Antenna recibe la señal durante el tiempo de recepción. La señal que recibe la Antena debe llegar al receptor. lossolid lines with arrow marksque se muestra en la figura anterior representan cómo la señal llega al receptor desde la antena. En este caso, los tubos Dual TR pasan la señal desde la primera sección de la guía de ondas a la siguiente sección de la guía de ondas.
El Duplexer equilibrado tiene una capacidad de manejo de alta potencia y un alto ancho de banda en comparación con el Duplexer de tipo rama.
Circulador como duplexor
Sabemos que el functionality del circulador es que si aplicamos una entrada a un puerto, entonces se producirá en el puerto, que está adyacente a él en el sentido de las agujas del reloj. No hay salida en los puertos restantes del circulador.
Por lo tanto, considere un circulador de 4 puertos y conecte el transmisor, la antena, el receptor y la carga correspondiente al puerto 1, puerto 2, puerto 3 y puerto 4 respectivamente. Ahora, entendamos cómo4-port circulator funciona como Duplexer.
La señal, que es producida por el transmisor tiene que llegar a la Antena porque la Antena transmitirá esa señal durante transmissionhora. Este propósito se logrará cuando el transmisor genere una señal en el puerto 1.
La señal que es recibida por la Antena debe llegar al receptor durante receptionhora. Este propósito se logrará cuando la antena presente en el puerto 2 reciba una señal externa.
La siguiente figura muestra el block diagram del circulador como Duplexer -

La figura anterior consta de un circulador de 4 puertos: el transmisor, la antena y la carga correspondiente están conectados al puerto 1, puerto 2 y puerto 4 del circulador, respectivamente, como se explica al comienzo de la sección.
El receptor no está conectado directamente al puerto 3. En cambio, los bloques correspondientes al limitador TR pasivo se colocan entre el puerto 3 del circulador y el receptor. Los bloques, tubo TR y limitador de diodos son los bloques correspondientes al limitador TR pasivo.
En realidad, el propio circulador actúa como Duplexer. No requiere bloques adicionales. Sin embargo, no brindará ningún tipo de protección al receptor. Por tanto, los bloques correspondientes al limitador TR pasivo se utilizan para proporcionar laprotection to the receiver.
Sistemas de radar - Antenas Phased Array
Una sola antena puede irradiar cierta cantidad de energía en una dirección particular. Obviamente, la cantidad de potencia de radiación aumentará cuando usemos un grupo de antenas juntas. El grupo de Antenas se llamaAntenna array.
Una matriz de antenas es un sistema radiante que comprende radiadores y elementos. Cada uno de estos radiadores tiene su propio campo de inducción. Los elementos se colocan tan cerca que cada uno se encuentra en el campo de inducción del vecino. Por tanto, el patrón de radiación producido por ellos, sería elvector sum de los individuales.
Las Antenas irradian individualmente y en arreglo, la radiación de todos los elementos se suma, para formar el haz de radiación, que tiene alta ganancia, alta directividad y mejor desempeño, con pérdidas mínimas.
Se dice que una matriz de antenas Phased Antenna array si la forma y dirección del patrón de radiación depende de las fases relativas y amplitudes de las corrientes presentes en cada Antena de ese conjunto.
Patrón de radiación
Consideremos 'n' elementos de radiación isotrópica, que cuando se combinan forman un array. La figura que se muestra a continuación le ayudará a comprender lo mismo. Sea el espacio entre los elementos sucesivos "d" unidades.

Como se muestra en la figura, todos los elementos de radiación reciben la misma señal entrante. Entonces, cada elemento produce un voltaje de salida igual de$sin \left ( \omega t \right)$. Sin embargo, habrá un igualphase difference $\Psi$entre elementos sucesivos. Matemáticamente, se puede escribir como:
$$\Psi=\frac{2\pi d\sin\theta }{\lambda }\:\:\:\:\:Equation\:1$$
Dónde,
$\theta$ es el ángulo en el que la señal entrante incide sobre cada elemento de radiación.
Matemáticamente, podemos escribir las expresiones para output voltages de 'n' elementos de radiación individualmente como
$$E_1=\sin\left [ \omega t \right]$$
$$E_2=\sin\left [\omega t+\Psi\right]$$
$$E_3=\sin\left [\omega t+2\Psi\right]$$
$$.$$
$$.$$
$$.$$
$$E_n=\sin\left [\omega t+\left (N-1\right )\Psi\right]$$
Dónde,
$E_1, E_2, E_3, …, E_n$son los voltajes de salida del primero, segundo, tercero,…, n ésimo elementos de radiación respectivamente.
$\omega$ es la frecuencia angular de la señal.
Obtendremos el overall output voltage $E_a$de la matriz sumando los voltajes de salida de cada elemento presente en esa matriz, ya que todos esos elementos de radiación están conectados en una matriz lineal. Matemáticamente, se puede representar como:
$$E_a=E_1+E_2+E_3+ …+E_n \:\:\:Equation\:2$$
Substitute, los valores de $E_1, E_2, E_3, …, E_n$ en la ecuación 2.
$$E_a=\sin\left [ \omega t \right]+\sin\left [\omega t+\Psi\right ]+\sin\left [\omega t+2\Psi\right ]+\sin\left [\omega t+\left (n-1\right )\Psi\right]$$
$$\Rightarrow E_a=\sin\left [\omega t+\frac{(n-1)\Psi)}{2}\right ]\frac{\sin\left [\frac{n\Psi}{2}\right]}{\sin\left [\frac{\Psi}{2}\right ]}\:\:\:\:\:Equation\:3$$
En la Ecuación 3, hay dos términos. Desde el primer trimestre, podemos observar que el voltaje de salida total$E_a$ es una onda sinusoidal que tiene una frecuencia angular $\omega$. Pero, está teniendo un cambio de fase de$\left (n−1\right )\Psi/2$. El segundo término de la Ecuación 3 es unamplitude factor.
La magnitud de la Ecuación 3 será
$$\left | E_a \right|=\left | \frac{\sin\left [\frac{n\Psi}{2}\right ]}{\sin\left [\frac{\Psi}{2}\right]} \right |\:\:\:\:\:Equation\:4$$
Obtendremos la siguiente ecuación sustituyendo la Ecuación 1 en la Ecuación 4.
$$\left | E_a \right|=\left | \frac{\sin\left [\frac{n\pi d\sin\theta}{\lambda}\right]}{\sin\left [\frac{\pi d\sin\theta}{\lambda}\right ]} \right |\:\:\:\:\:Equation\:5$$
La ecuación 5 se llama field intensity pattern. El patrón de intensidad de campo tendrá los valores de ceros cuando el numerador de la Ecuación 5 sea cero.
$$\sin\left [\frac{n\pi d\sin\theta}{\lambda}\right ]=0$$
$$\Rightarrow \frac{n\pi d\sin\theta}{\lambda}=\pm m\pi$$
$$\Rightarrow nd\sin\theta=\pm m\lambda$$
$$\Rightarrow \sin\theta=\pm \frac{m\lambda}{nd}$$
Dónde,
$m$ es un número entero y es igual a 1, 2, 3 y así sucesivamente.
Podemos encontrar el maximum valuesdel patrón de intensidad de campo utilizando la regla L-Hospital cuando tanto el numerador como el denominador de la Ecuación 5 son iguales a cero. Podemos observar que si el denominador de la Ecuación 5 se vuelve cero, entonces el numerador de la Ecuación 5 también se vuelve cero.
Ahora, obtengamos la condición por la cual el denominador de la Ecuación 5 se vuelve cero.
$$\sin\left [\frac{\pi d\sin\theta}{\lambda}\right ]=0$$
$$\Rightarrow \frac{\pi d\sin\theta}{\lambda}=\pm p\pi$$
$$\Rightarrow d\sin\theta=\pm p\lambda$$
$$\Rightarrow \sin\theta=\pm \frac{p\lambda}{d}$$
Dónde,
$p$ es un número entero y es igual a 0, 1, 2, 3 y así sucesivamente.
Si consideramos $p$ como cero, obtendremos el valor de $\sin\theta$como cero. Para este caso, obtendremos el valor máximo del patrón de intensidad de campo correspondiente almain lobe. Obtendremos los valores máximos del patrón de intensidad de campo correspondientes aside lobes, cuando consideramos otros valores de $p$.
La dirección del patrón de radiación de la matriz en fase se puede dirigir variando las fases relativas de la corriente presente en cada antena. Este es eladvantage de matriz en fase de escaneo electrónico.