Power Electronics - Panduan Cepat
Power Electronics mengacu pada proses pengendalian aliran arus dan tegangan dan mengubahnya menjadi bentuk yang sesuai untuk beban pengguna. Sistem elektronik daya yang paling diinginkan adalah yang efisiensi dan keandalannya 100%.
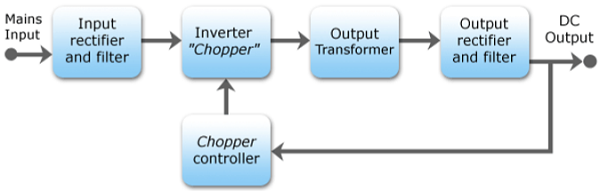
Perhatikan diagram blok berikut. Ini menunjukkan komponen sistem Power Electronic dan bagaimana mereka saling terkait.
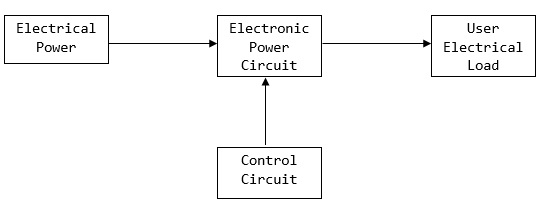
Sistem elektronika daya mengubah energi listrik dari satu bentuk ke bentuk lain dan memastikan hal berikut tercapai -
- Efisiensi maksimal
- Keandalan maksimal
- Ketersediaan maksimal
- Biaya minimum
- Berat terkecil
- Ukuran kecil
Aplikasi Power Electronics diklasifikasikan menjadi dua jenis - Aplikasi Statis dan Aplikasi Drive.
Aplikasi Statis
Ini menggunakan bagian mekanis yang bergerak dan / atau berputar seperti pengelasan, pemanas, pendingin, dan pelapisan listrik serta daya DC.
Catu Daya DC

Aplikasi Drive
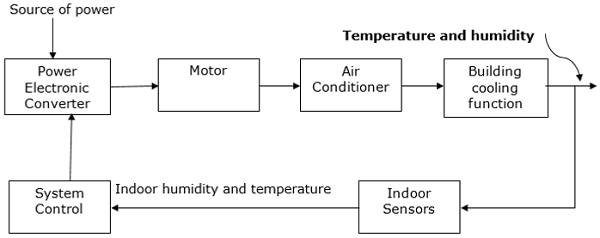
Aplikasi penggerak memiliki bagian yang berputar seperti motor. Contohnya termasuk kompresor, pompa, sabuk konveyor, dan sistem pendingin udara.
Sistem pendingin udara
Elektronik daya banyak digunakan di AC untuk mengontrol elemen seperti kompresor. Diagram skematik yang menunjukkan bagaimana elektronika daya digunakan dalam AC ditunjukkan di bawah ini.
Perangkat switching elektronik daya adalah kombinasi driver semikonduktor daya aktif yang dapat dialihkan yang telah terintegrasi menjadi satu. Karakteristik utama dari sakelar ditentukan oleh korelasi internal fungsi dan interaksi sistem terintegrasi. Gambar yang diberikan di bawah ini menunjukkan cara kerja sistem sakelar elektronik daya.
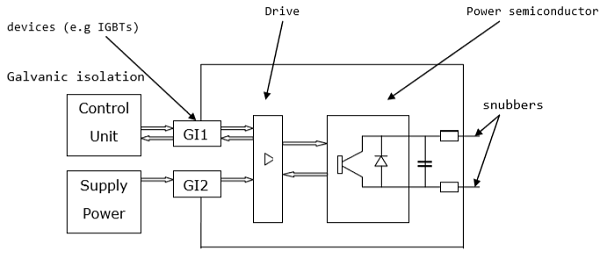
Sirkuit eksternal dari diagram di atas biasanya berada pada potensi tinggi relatif terhadap unit kontrol. Pemancar induktif digunakan untuk mendukung perbedaan potensial yang diperlukan antara dua antarmuka.
Perangkat sakelar daya biasanya dipilih berdasarkan peringkat di mana mereka menangani daya, yaitu produk peringkat arus dan tegangannya alih-alih laju disipasi dayanya. Akibatnya, fitur menarik utama dalam sakelar elektronik daya adalah kemampuannya untuk menghilangkan daya rendah atau hampir tidak ada. Hasilnya, sakelar elektronik mampu mencapai lonjakan daya yang rendah dan terus menerus.
Elemen rangkaian linier mengacu pada komponen dalam rangkaian listrik yang menunjukkan hubungan linier antara masukan arus dan keluaran tegangan. Contoh elemen dengan sirkuit linier meliputi -
- Resistors
- Capacitors
- Inductors
- Transformers
Untuk mendapatkan pemahaman yang lebih baik tentang elemen rangkaian linier, diperlukan analisis elemen resistor.
Resistor
Resistor adalah perangkat di mana aliran arus listrik dibatasi sehingga menghasilkan konversi energi. Misalnya, ketika listrik mengalir melalui bola lampu, listrik tersebut diubah menjadi bentuk energi yang berbeda seperti panas dan / atau cahaya. Hambatan suatu elemen diukur dalam ohm (Ω).
Ukuran resistansi dalam rangkaian diberikan oleh -
$$R=\rho \frac{L}{A}$$Dimana R - resistensi; ρ - resistivitas; L- panjang kawat; danA - luas penampang kawat
Simbol Berbagai Resistor
| Penghambat |

|
| Sebuah resistor variabel |
|
| Potensiometer |
|
Kapasitor
Kapasitor mengacu pada perangkat listrik yang memiliki dua bahan konduktor (juga dikenal sebagai pelat) yang dipisahkan oleh isolator yang dikenal sebagai dielektrik. Ia menggunakan medan listrik untuk menyimpan energi listrik. Medan listrik berkembang ketika kapasitor dihubungkan ke baterai, sehingga membuat muatan listrik positif terakumulasi pada satu pelat dan muatan listrik negatif pada pelat lainnya.
Ketika energi disimpan dalam medan listrik kapasitor, prosesnya disebut pengisian, dan ketika energi dihilangkan, proses tersebut disebut pelepasan. Tingkat energi listrik yang disimpan dalam kapasitor disebut kapasitansi dan diukur dalam farad (F). Satu farad sama dengan satu coulomb per unit volt yang diberikan oleh 1 C / V.
Perbedaan antara kapasitor dan baterai adalah kapasitor menyimpan energi listrik sedangkan baterai menyimpan energi kimia dan melepaskan energi dengan kecepatan lambat.
Simbol Berbagai Kapasitor
Berbagai simbol kapasitor diberikan pada tabel di bawah ini.
| Kapasitor Tetap |
|
| Kapasitor Variabel |
|
| Kapasitor Terpolarisasi |
|
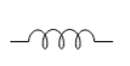
Induktor
Induktor adalah perangkat elektronik yang menggunakan medan magnet untuk menyimpan energi listrik. Bentuk induktor yang paling sederhana adalah coil atau kawat dalam bentuk loop dimana induktansi berbanding lurus dengan jumlah loop pada kawat. Selain itu, induktansi tergantung pada jenis material di kawat dan jari-jari loop.
Dengan jumlah belokan dan ukuran radius tertentu, hanya inti udara yang dapat menghasilkan induktansi paling sedikit. Bahan dielektrik, yang memiliki fungsi yang sama dengan udara termasuk kayu, kaca, dan plastik. Bahan-bahan ini membantu dalam proses penggulungan induktor. Bentuk belitan (bentuk donat) serta zat feromagnetik, misalnya besi, meningkatkan induktansi total.
Jumlah energi yang dapat disimpan induktor dikenal sebagai induktansi. Ini diukur dalam Henry (H).
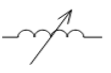
Simbol Berbagai Induktor
| Induktor tetap |
|
| Induktor variabel |
|
Transformer
Ini mengacu pada perangkat yang mengubah energi dari satu tingkat ke tingkat lainnya melalui proses yang dikenal sebagai induksi elektromagnetik. Biasanya digunakan untuk menaikkan atau menurunkan tegangan AC dalam aplikasi yang memanfaatkan tenaga listrik.
Ketika arus pada sisi primer transformator bervariasi, fluks magnet yang bervariasi dibuat pada intinya, yang menyebar ke belitan sekunder transformator dalam bentuk medan magnet.
Prinsip pengoperasian transformator bergantung pada hukum induksi elektromagnetik Faraday. Hukum tersebut menyatakan bahwa laju perubahan fluks yang menghubungkan dengan waktu secara langsung berkaitan dengan EMF yang diinduksi dalam sebuah konduktor.
Trafo memiliki tiga bagian utama -
- Gulungan primer
- Inti magnet
- Gulungan sekunder
Simbol Transformer
Perangkat Tambahan
Perangkat Elektromagnetik
Konsep elektromagnetisme banyak digunakan dalam teknologi dan diterapkan pada motor, generator, dan bel listrik. Misalnya, di bel pintu, komponen elektromagnetik menarik genta yang membentur bel dan menyebabkannya berdering.
Pengontrol
Pengontrol adalah perangkat yang menerima sinyal elektronik yang ditransfer dari variabel terukur dalam suatu proses dan membandingkan nilai yang diperoleh dengan titik kontrol yang ditetapkan. Ini menggunakan algoritma digital untuk menghubungkan dan membandingkan fungsi.
Sensor
Sensor digunakan untuk menentukan arus, yang secara konstan bervariasi untuk memberikan umpan balik untuk tujuan kontrol. Penginderaan arus memungkinkan untuk mencapai fungsi konverter yang halus dan akurat. Sensor arus sangat penting dalam konverter sehingga informasi dalam konverter paralel atau multi fase mudah dibagikan.
Filter
Filter elektronik juga digunakan untuk melakukan pemrosesan sinyal untuk menghilangkan frekuensi yang tidak diinginkan. Mereka adalah sirkuit analog dan ada dalam keadaan aktif atau pasif.
Penyearah yang dikontrol silikon atau penyearah yang dikendalikan semikonduktor adalah perangkat pengontrol arus keadaan padat empat lapis. Nama "penyearah terkontrol silikon" adalah nama dagang General Electric untuk sejenis thyristor.
SCR terutama digunakan pada perangkat elektronik yang membutuhkan kontrol tegangan dan daya tinggi. Ini membuatnya dapat diterapkan dalam operasi daya AC sedang dan tinggi seperti fungsi kontrol motor.
Sebuah SCR bekerja ketika pulsa gerbang diterapkan padanya, seperti dioda. Ia memiliki empat lapisan semikonduktor yang membentuk dua struktur yaitu; NPNP atau PNPN. Selain itu, ia memiliki tiga persimpangan berlabel J1, J2 dan J3 dan tiga terminal (anoda, katoda dan gerbang). SCR direpresentasikan secara diagram seperti yang ditunjukkan di bawah ini.
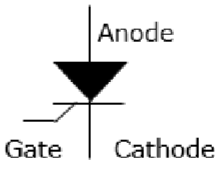
Anoda terhubung ke tipe-P, katoda ke tipe-N dan gerbang ke tipe-P seperti yang ditunjukkan di bawah ini.
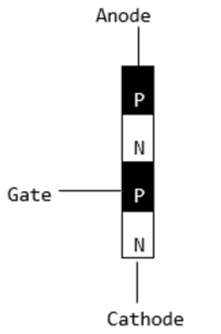
Dalam SCR, semikonduktor intrinsik adalah silikon dimana dopan yang dibutuhkan diinfuskan. Namun, doping persimpangan PNPN tergantung pada aplikasi SCR.
Mode Operasi di SCR
OFF state (forward blocking mode)- Di sini anoda diberi tegangan positif, gerbang diberi tegangan nol (terputus) dan katoda diberi tegangan negatif. Akibatnya, Persimpangan J1 dan J3 berada dalam bias maju sedangkan J2 dalam bias balik. J2 mencapai nilai longsoran kerusakannya dan mulai bekerja. Di bawah nilai ini, resistansi J1 secara signifikan tinggi dan dengan demikian dikatakan dalam keadaan mati.
ON state (conducting mode)- SCR dibawa ke keadaan ini baik dengan meningkatkan beda potensial antara anoda dan katoda di atas tegangan longsoran atau dengan menerapkan sinyal positif di gerbang. Segera SCR mulai bekerja, tegangan gerbang tidak lagi diperlukan untuk mempertahankan status ON dan, oleh karena itu, dimatikan oleh -
Penurunan aliran arus yang melewatinya ke nilai terendah yang disebut arus penahan
Menggunakan transistor yang ditempatkan di persimpangan.
Reverse blocking- Ini mengkompensasi penurunan tegangan maju. Hal ini disebabkan oleh fakta bahwa diperlukan daerah doped rendah di P1. Penting untuk dicatat bahwa peringkat tegangan pemblokiran maju dan mundur sama.
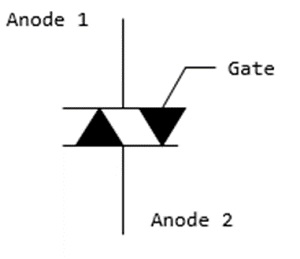
Akronim TRIAC adalah singkatan dari Triode for Alternating Current. TRIAC adalah perangkat semikonduktor dengan tiga terminal yang mengontrol aliran arus, sehingga dinamai Triac. Tidak seperti SCR, TRIAC adalah dua arah sedangkan SCR adalah dua arah. Ini sangat ideal untuk operasi yang menggunakan daya AC untuk tujuan peralihan karena dapat mengontrol aliran arus untuk kedua bagian dalam siklus arus bolak-balik. Ini dijelaskan dengan jelas pada diagram di bawah ini.
Simbol TRIAC
Diagram sirkuit untuk TRIAC ditunjukkan di bawah ini. Ini menyerupai dua thyristor yang ditempatkan kembali ke belakang.
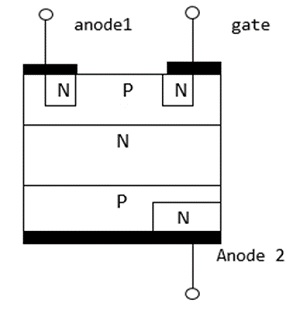
Struktur TRIAC
Struktur TRIAC dianggap sebagai DIAC yang memiliki kontak gerbang ekstra yang digabungkan untuk memastikan kontrol perangkat. Mirip dengan perangkat daya lainnya, TRIAC dibuat dari silikon. Akibatnya, proses fabrikasi silikon mengarah pada produksi perangkat yang lebih murah. Seperti yang ditunjukkan di bawah ini, TRIAC memiliki enam bidang yaitu; empat wilayah tipe-N dan dua wilayah tipe-P.
Operasi TRIAC
Pengoperasian TRIAC didasarkan pada thyristor. Ini memfasilitasi fungsi switching dalam komponen dan sistem kelistrikan AC. Mereka banyak digunakan dalam dimmer cahaya karena memungkinkan kedua bagian dari siklus AC digunakan. Hasilnya, ini membuatnya lebih efisien dalam penggunaan daya. Sebisa mungkin menggunakan thyristor untuk berfungsi sebagai TRIAC, itu tidak hemat biaya untuk operasi yang membutuhkan daya rendah. TRIAC dapat dilihat dalam dua bentuk thyristor.

TRIAC biasanya digunakan dalam aplikasi yang tidak memerlukan daya yang sangat tinggi karena mereka menunjukkan peralihan non-simetris dalam pengoperasiannya. Ini tidak menguntungkan untuk aplikasi yang menggunakan daya tinggi karena dapat menyebabkan interferensi elektromagnetik. Hasilnya, TRIAC digunakan dalam kontrol motor, peredup lampu perumahan ringan, dan kipas listrik kecil untuk mengontrol kecepatan.
Transistor Persimpangan Bipolar (BJT) adalah transistor yang operasinya bergantung pada kontak yang dibuat oleh dua semikondutor. Itu dapat bertindak sebagai sakelar, penguat atau osilator. Ini dikenal sebagai transistor bipolar karena operasinya membutuhkan dua jenis pembawa muatan (lubang dan elektron). Lubang merupakan pembawa muatan dominan dalam semikonduktor tipe-P sedangkan elektron adalah pembawa muatan utama dalam semikonduktor tipe-N.
Simbol BJT

Struktur BJT
BJT memiliki dua persimpangan PN yang terhubung kembali ke belakang dan berbagi wilayah B (basis) yang sama. Ini memastikan kontak dibuat di semua wilayah yang merupakan basis, kolektor dan emitor. Struktur transistor bipolar PNP ditunjukkan di bawah ini.
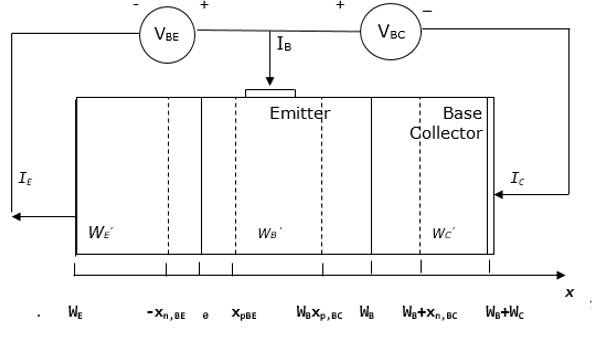
BJT yang ditunjukkan di atas terdiri dari dua dioda yang dihubungkan kembali ke belakang, menghasilkan penipisan daerah yang disebut kuasi-netral. Lebar kuasi netral emitor, basis dan kolektor ditunjukkan di atas sebagai W E ', W B ' dan W C '. Mereka diperoleh sebagai berikut -
$$W_{E}^{'}=W_{E}-X_{n,BE}$$ $$W_{B}^{'}=W_{B}-X_{p,BE}-X_{p,BC}$$ $$W_{C}^{'}=W_{C}-X_{n,BC}$$Tanda-tanda konvensional arus untuk emitor, basis dan kolektor dilambangkan dengan I E , I B dan aku C masing-masing. Oleh karena itu, arus kolektor dan arus basis bertanda positif ketika arus positif bertemu dengan kontak kolektor atau basis. Selain itu, arus emitor menjadi positif ketika arus meninggalkan kontak emitor. Jadi,
$$I_{E}=I_{B}+I_{C}$$Ketika tegangan positif diterapkan ke kontak basis relatif terhadap kolektor dan emitor, tegangan kolektor-basis serta tegangan basis-emitor menjadi positif.
Sederhananya, V CE diasumsikan nol.
Difusi elektron terjadi dari emitor ke basis sedangkan difusi lubang berasal dari basis ke emitor. Begitu elektron mencapai daerah terkuras kolektor-basa, mereka tersapu oleh medan listrik. Elektron-elektron ini membentuk arus kolektor.
Ketika BJT bias dalam mode aktif maju, arus emitor total diperoleh dengan menambahkan arus difusi elektron ( I E, n ), arus difusi lubang ( I E, p ) dan arus baseemitter.
$$I_{E}=I_{E,n}+I_{E,p}+I_{r,d}$$Arus kolektor total diberikan oleh arus difusi elektron ( I E, n ), dikurangi arus rekombinasi basa ( I r, B ).
$$I_{C}=I_{E,n}-I_{r,B}$$Jumlah arus basis I B diperoleh dengan menjumlahkan arus difusi lubang ( I E, p ), arus rekombinasi basis ( I r, B ) dan arus rekombinasi basis-emitor dari lapisan deplesi ( I r, d ).
$$I_{B}=I_{E,p}+I_{r,B}+I_{r,d}$$Faktor Transportasi
Ini diberikan oleh rasio arus kolektor dan arus emitor.
$$\alpha =\frac{I_{C}}{I_{E}}$$Dengan menerapkan hukum arus Kirchoff, diketahui bahwa arus basis diberikan oleh selisih antara arus emitor dan arus kolektor.
Keuntungan Saat Ini
Ini diberikan oleh rasio arus kolektor ke arus basis.
$$\beta =\frac{I_{C}}{I_{B}}=\frac{\alpha }{1-\alpha }$$Di atas menjelaskan bagaimana BJT dapat menghasilkan amplifikasi arus. Faktor transpor (α) mendekati satu jika arus kolektor hampir setara dengan arus emitor. Keuntungan saat ini (β) dengan demikian menjadi lebih besar dari satu.
Untuk analisis lebih lanjut, faktor transpor (α) ditulis ulang sebagai hasil kali dari efisiensi emitor (γ E ) faktor transpor dasar (α T ) dan faktor rekombinasi dari lapisan penipisan (δ r ). Ini ditulis ulang sebagai berikut -
$$\alpha =\gamma _{E}\times \alpha _{T}\times \delta _{r}$$Berikut ini adalah ringkasan dari efisiensi emitor, faktor transpor dasar dan faktor rekombinasi lapisan penipisan.
Efisiensi Emitor
$$\gamma _{E}=\frac{I_{E,n}}{I_{E,p}+I_{E,P}}$$Faktor Transportasi Dasar
$$\alpha _{T}=\frac{I_{E,n}-I_{r,b}}{I_{E,n}}$$Faktor Rekombinasi Lapisan Deplesi
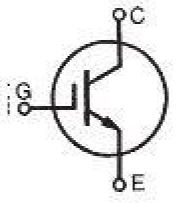
$$\delta _{r}=\frac{I_{E}-I_{r,d}}{I_{E,n}}$$Transistor bipolar gerbang terisolasi (IGBT) adalah perangkat semikonduktor dengan tiga terminal dan digunakan terutama sebagai sakelar elektronik. Ini ditandai dengan peralihan cepat dan efisiensi tinggi, yang menjadikannya komponen yang diperlukan dalam peralatan modern seperti ballast lampu, mobil listrik, dan penggerak frekuensi variabel (VFD).
Kemampuannya untuk menghidupkan dan mematikan, dengan cepat, membuatnya dapat diterapkan pada amplifier untuk memproses pola gelombang yang kompleks dengan modulasi lebar pulsa. IGBT menggabungkan karakteristik MOSFET dan BJT untuk masing-masing mencapai kapasitas tegangan arus tinggi dan tegangan saturasi rendah. Ini mengintegrasikan gerbang terisolasi menggunakan FET (transistor efek medan) untuk mendapatkan input kontrol.
Simbol IGBT
Amplifikasi IGBT dihitung dengan rasio sinyal keluarannya terhadap sinyal masukannya. Dalam BJT konvensional, tingkat penguatan (β) sama dengan rasio arus keluarannya terhadap arus masukan.
IGBT memiliki nilai resistansi status ON (RON) yang sangat rendah daripada MOSFET. Ini menyiratkan bahwa penurunan tegangan (I 2 R) melintasi bipolar untuk operasi sakelar tertentu sangat rendah. Tindakan pemblokiran maju IGBT mirip dengan MOSFET.
Ketika IGBT digunakan sebagai sakelar terkontrol dalam keadaan statis, peringkat arus dan tegangannya sama dengan BJT. Sebaliknya, gerbang terisolasi di IGBT membuatnya lebih mudah untuk menggerakkan muatan BJT dan karenanya lebih sedikit daya yang dibutuhkan.
IGBT dinyalakan atau dimatikan berdasarkan apakah terminal gerbangnya telah diaktifkan atau dinonaktifkan. Beda potensial positif konstan melintasi gerbang dan emitor mempertahankan IGBT dalam status ON. Saat sinyal input dilepas, IGBT dimatikan.
Prinsip Operasi IGBT
IGBT hanya membutuhkan tegangan kecil untuk menjaga konduksi di perangkat tidak seperti di BJT. IGBT adalah perangkat searah, yaitu hanya dapat AKTIF untuk arah maju. Ini berarti arus mengalir dari kolektor ke emitor tidak seperti di MOSFET, yang bersifat bi-directional.
Penerapan IGBT
IGBT digunakan dalam aplikasi daya sedang hingga sangat tinggi, misalnya motor traksi. Dalam IGBT besar, dimungkinkan untuk menangani arus tinggi dalam kisaran ratusan ampere dan tegangan pemblokiran hingga 6kv.
IGBT juga digunakan pada perangkat elektronik daya seperti konverter, inverter, dan peralatan lain yang memerlukan peralihan solid state. Bipolar tersedia dengan arus dan tegangan tinggi. Namun, kecepatan peralihannya rendah. Sebaliknya, MOSFET memiliki kecepatan peralihan yang tinggi meskipun harganya mahal.
Metal Oxide Semiconductor Field Effect Transistor (MOSFET) adalah jenis transistor yang digunakan untuk mengalihkan sinyal elektronik. Ini memiliki empat terminal yaitu; sumber (S), Tiriskan (D), Gerbang (G) dan Badan (B). Tubuh MOSFET biasanya terhubung ke terminal sumber (S), yang menghasilkan perangkat tiga terminal yang mirip dengan transistor efek medan lainnya ( FET). Karena dua terminal utama ini biasanya saling berhubungan melalui korsleting, hanya tiga terminal yang terlihat dalam diagram kelistrikan.
Ini adalah perangkat paling umum di sirkuit yang digital dan analog. Dibandingkan dengan transistor biasa, MOSFET membutuhkan arus rendah (kurang dari satu mill-ampere) untuk ON. Pada saat yang sama, ia memberikan beban arus tinggi lebih dari 50 Ampere.
Pengoperasian MOSFET
MOSFET memiliki lapisan tipis silikon dioksida, yang berfungsi sebagai pelat kapasitor. Isolasi gerbang pengontrol meningkatkan resistansi MOSFET ke tingkat yang sangat tinggi (hampir tak terbatas).
Terminal gerbang dilarang dari jalur arus utama; dengan demikian, tidak ada arus yang bocor ke gerbang.
MOSFET ada dalam dua bentuk utama -
Depletion state- Ini membutuhkan tegangan sumber gerbang (V GB ) untuk mematikan komponen. Ketika gerbang berada pada nol (V GB ) perangkat biasanya ON, oleh karena itu, berfungsi sebagai resistor beban untuk rangkaian logika yang diberikan. Untuk memuat perangkat dengan penipisan tipe-N, 3V adalah tegangan ambang di mana perangkat dimatikan dengan mengalihkan gerbang pada negatif 3V.
Enhancement state- Tegangan sumber gerbang (V GB ) diperlukan dalam keadaan ini untuk menghidupkan komponen. Ketika gerbang berada pada nol (V GB ) perangkat biasanya OFF dan dapat dinyalakan dengan memastikan tegangan gerbang lebih tinggi dari tegangan sumber.
Simbol dan Konstruksi Dasar

Dimana, D - Tiriskan; G - Gerbang; S- Sumber; danSub - Substrat
A (BJT) memancarkan arus 1mA, dan memiliki efisiensi emitor 0,99. Faktor transpor dasar adalah 0,994 dan faktor rekombinasi lapisan deplesi adalah 0,997. Untuk BJT, hitung yang berikut -
Faktor transportasi
Faktor transport yang ditulis ulang diberikan oleh -
$$\alpha =\gamma _{E}\times \alpha _{T}\times \delta _{r}$$Mengganti nilai, kita dapatkan
$$\alpha =0.99\times 0.994\times 0.997=0.981$$Keuntungan saat ini
Keuntungan saat ini diberikan oleh -
$$\beta =\frac{I_{C}}{I_{B}}=\frac{\alpha }{1-\alpha }$$Mengganti nilai, kita dapatkan
$$\beta =\frac{0.981}{1-0.981}=51.6$$Arus kolektor
$$I_{C}=\alpha \times I_{E}=0.981\times 1=0.981mA$$Arus basis
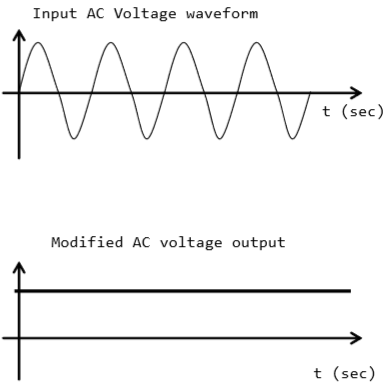
$$I_{B}=I_{E}-I_{C}=1-0.981=19\mu A$$Konverter Terkendali Fase
Konverter yang dikontrol fase mengubah energi AC ke DC (pergantian saluran). Dengan kata lain, ini digunakan dalam konversi daya AC frekuensi tetap dan tegangan tetap menjadi output tegangan DC variabel. Ini dinyatakan sebagai
Fixed Input - Tegangan, frekuensi dan daya AC
Variable output - Output tegangan DC
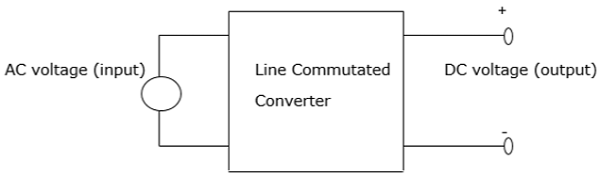
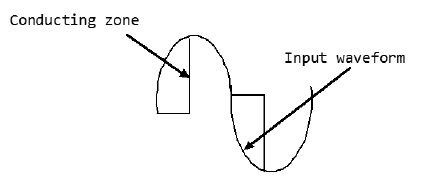
Tegangan input AC yang masuk ke konverter biasanya pada RMS tetap (root mean square) dan frekuensi tetap. Dimasukkannya thyristor yang dikontrol fase dalam konverter memastikan bahwa tegangan output DC variabel diperoleh. Ini dimungkinkan dengan mengubah sudut fase di mana thyristor dipicu. Akibatnya, diperoleh bentuk gelombang berdenyut dari arus beban.
Selama setengah siklus suplai input, thyristor dalam bias maju dan dinyalakan melalui penerapan pulsa gerbang yang memadai (pemicu). Arus mulai mengalir setelah thyristor dinyalakan, yaitu pada titik ωt = α ke titik ωt = β. Saat arus beban turun ke nol, thyristor akan menjadi OFF sebagai akibat pergantian garis (alami).
Ada sejumlah konverter daya yang memanfaatkan pergantian alami. Ini termasuk -
- Konverter AC ke DC
- Konverter AC ke AC
- Pengontrol tegangan AC
- Cycloconverters
Konverter daya di atas akan dijelaskan pada bab selanjutnya dalam tutorial ini.
2- Konverter Pulsa
Konverter pulsa 2 fase, juga dikenal sebagai generator modulator lebar pulsa (PWM) level 2, digunakan untuk menghasilkan pulsa untuk konverter modulasi lebar pulsa yang berbasis pembawa. Ini dilakukan dengan memanfaatkan topologi level-dua. Blok ini mengontrol perangkat switching untuk tujuan kontrol seperti IGBT dan FET yang ada di tiga jenis konverter yaitu -
- 1 lengan (jembatan setengah fase tunggal)
- 2 lengan (jembatan penuh fase tunggal)
- 3 lengan (jembatan tiga fase)
Sinyal input referensi dalam konverter 2-pulsa dibandingkan dengan pembawa. Jika sinyal input referensi lebih dari pembawa, pulsa sama dengan 1 untuk perangkat atas dan 0 untuk perangkat bawah.
Untuk mengontrol perangkat dengan jembatan penuh fase tunggal (2 lengan), perlu untuk menerapkan modulasi lebar pulsa unipolar atau bipolar. Dalam modulasi unipolar masing-masing dari kedua lengan dikontrol secara independen. Sinyal input referensi kedua dihasilkan secara internal melalui pergeseran titik referensi awal sebesar 180 °
Ketika PWM bipolar diterapkan, status perangkat sakelar bawah pada jembatan penuh fase tunggal kedua mirip dengan sakelar atas pada perangkat jembatan penuh fase tunggal pertama. Menggunakan modulasi unipolar menghasilkan bentuk gelombang AC yang halus sementara modulasi bipolar menghasilkan tegangan yang kurang bervariasi.
Konverter 3-Pulsa
Pertimbangkan konverter tiga fase 3-pulsa, di mana masing-masing thyristor berada dalam mode konduksi selama sepertiga dari siklus suplai. Waktu paling awal thyristor dipicu ke konduksi adalah pada 30 ° mengacu pada tegangan fase.
Pengoperasiannya dijelaskan menggunakan tiga thyristor dan tiga dioda. Ketika thyristor T1, T2 dan T3 diganti oleh dioda D1, D2 dan D3, konduksi akan dimulai pada sudut 30 ° sehubungan dengan tegangan fasa masing-masing u an , u bn dan u cn . Oleh karena itu, sudut tembak α awalnya diukur pada 30 ° mengacu pada tegangan fasa yang sesuai dengannya.
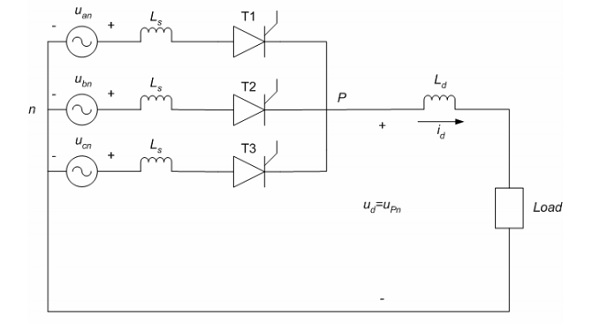
Arus hanya dapat mengalir dalam satu arah melalui thyristor, yang mirip dengan mode inverter yang berfungsi dimana daya mengalir dari sisi DC ke sisi AC. Selain itu, tegangan pada thyristor dikontrol dengan mengontrol sudut tembak. Ini dicapai ketika α = 0 (mungkin dalam penyearah). Dengan demikian, konverter 3-pulsa bertindak sebagai inverter dan penyearah.
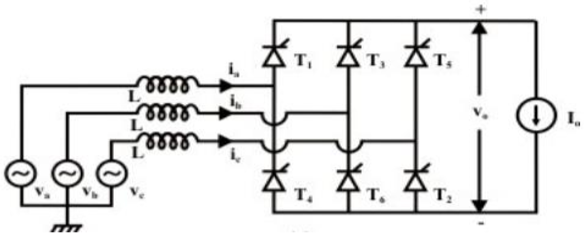
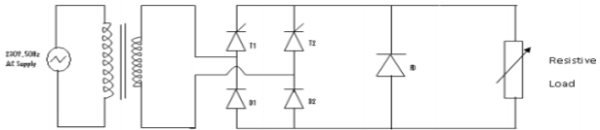
Konverter 6-Pulsa
Gambar di bawah ini menunjukkan konverter yang dikontrol jembatan enam pulsa yang terhubung ke sumber tiga fase. Dalam konverter ini, jumlah pulsa dua kali fase, yaitup = 2m. Dengan menggunakan konfigurasi konverter yang sama, dimungkinkan untuk menggabungkan dua jembatan dari enam pulsa untuk mendapatkan dua belas atau lebih konverter pulsa.
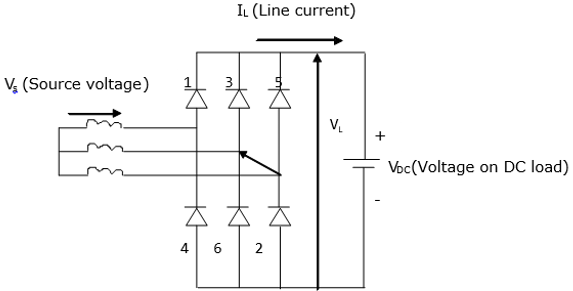
Ketika pergantian tidak tersedia, dua dioda akan berjalan pada waktu tertentu. Selanjutnya, untuk mendapatkan penurunan tegangan pada beban, dua dioda harus ditempatkan pada kaki jembatan yang berlawanan. Misalnya, dioda 3 dan 6 tidak bisa ON pada saat bersamaan. Oleh karena itu, penurunan tegangan pada beban DC merupakan kombinasi tegangan saluran VL dari sumber tiga fasa.
Penting untuk dicatat bahwa semakin banyak jumlah pulsa, semakin besar penggunaan konverter. Selain itu, semakin sedikit jumlah pulsa semakin sedikit penggunaan konverter.
Analisis kebanyakan konverter biasanya disederhanakan dalam kondisi ideal (tanpa impedansi sumber). Namun, asumsi ini tidak dibenarkan karena impedansi sumber biasanya induktif dengan elemen resistif yang dapat diabaikan.
Induktansi sumber memiliki pengaruh yang signifikan terhadap kinerja konverter karena keberadaannya mengubah tegangan keluaran konverter. Akibatnya, tegangan keluaran berkurang saat arus beban berkurang. Selain itu, bentuk gelombang arus masukan dan tegangan keluaran berubah secara signifikan.
Efek induktansi sumber pada konverter dianalisis dengan dua cara berikut.
Efek pada Fase Tunggal
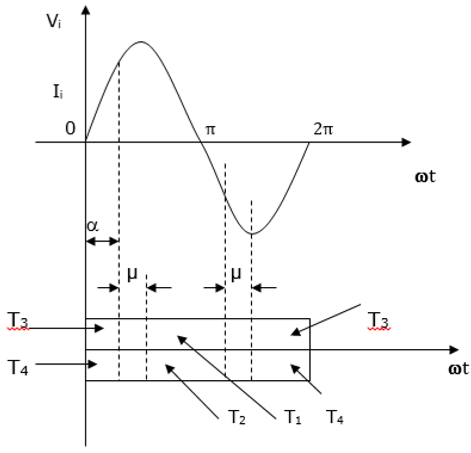
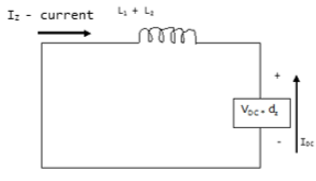
Dengan asumsi bahwa konverter beroperasi dalam mode konduksi dan riak dari arus beban dapat diabaikan, tegangan rangkaian terbuka menjadi sama dengan keluaran DC rata-rata pada sudut tembak α. Diagram di bawah ini menunjukkan konverter yang dikontrol penuh dengan sumber dalam fasa tunggal. Thyristor T 3 dan T 4 diasumsikan dalam mode konduksi saat t = 0. Sebaliknya, T 1 dan T 2 menyala ketika ωt = α

Dimana -
- V i = tegangan input
- I i = arus masukan
- V o = tegangan keluaran
- I o = tegangan keluaran
Ketika tidak ada induktansi sumber, pergantian akan terjadi pada T 3 dan T 4 . Dengan segera, thyristor T 1 dan T 2 AKTIF. Ini akan menyebabkan polaritas masukan berubah secara instan. Dengan adanya induktansi sumber, perubahan polaritas dan pergantian tidak terjadi secara instan. Jadi, T 3 dan T 4 tidak berubah segera setelah T 1 dan T 2 dinyalakan.
Pada beberapa interval, keempat thyristor akan berjalan. Interval konduksi ini disebut interval tumpang tindih (μ).
Tumpang tindih selama pergantian mengurangi tegangan output DC dan sudut pemadaman γ yang mengakibatkan pergantian gagal saat α mendekati 180 °. Ini ditunjukkan oleh bentuk gelombang di bawah ini.
Efek pada Tiga Fase
Sama seperti konverter fase tunggal, tidak ada pergantian seketika karena adanya induktansi sumber. Mempertimbangkan induktansi sumber, efek (kualitatif) pada kinerja konverter sama seperti pada konverter fase tunggal. Ini ditunjukkan pada diagram di bawah ini.
Penting untuk menentukan parameter kinerja untuk berbagai konverter yang topologinya dapat berupa fase tunggal atau multi fase.
Asumsi
- Perangkat yang digunakan ideal, yaitu tidak mengalami kerugian
- Perangkat memiliki beban resistif
Tegangan DC pada Beban
$$V_{DC}=\frac{1}{T} \int_{0}^{T}V_{L}\left ( t \right )dt$$Tegangan RMS pada Beban
$$V_{L}=\sqrt{\frac{1}{T}}\int_{0}^{T}V_{L}^{2}\left ( t \right )dt$$Faktor Bentuk
$$FF=\frac{V_{L}}{V_{DC}}$$Faktor Riak
$$RF=\frac{\sqrt{V_{L}^{2}-V_{DC}^{2}}}{V_{DC}}=\sqrt{FF^{2}-1}$$Efisiensi (Faktor Perbaikan)
$$\eta =\frac{P_{DC}}{P_{L}+P_{D}}$$Dimana di atas didefinisikan sebagai -
$P_{DC}=V_{DC}\times I_{DC}$
$P_{L}=V_{L}\times I_{L}$
$P_{D}=R_{D}\times I_{L}^{2}$($P_{D}$ adalah kerugian penyearah dan $R_{D}$ perlawanan)
$$\eta =\frac{V_{DC}I_{DC}}{\left ( V_{L}I_{L} \right )+\left ( R_{D}I_{L}^{2} \right )}=\frac{V_{DC}^{2}}{V_{L}^{2}}\times \frac{1}{1+\frac{R_{D}}{R_{L}}}$$Tapi $R_{D}=0$
Karena itu,
$$\eta =\left ( \frac{V_{DC}}{V_{L}} \right )^{2}=\left ( \frac{1}{FF}\right )^{2}$$Faktor Pemanfaatan Transformator
$$TUF=\frac{P_{DC}}{VA \:Rating \:of \:the \:Transformer }=\frac{P_{DC}}{\frac{VA_{p}+VA_{s}}{2}}$$VA p dan VA s adalah peringkat daya primer dan sekunder dari transformator.
Dalam konverter arus searah tegangan tinggi (HVDC), stasiun-stasiun diubah jalurnya. Ini menyiratkan bahwa arus awal katup hanya dapat ditunda dengan referensi nilai nol dari tegangan bus konverter dalam bentuk AC. Akibatnya, untuk kontrol tegangan yang lebih baik, bus konverter dihubungkan ke sumber daya reaktif.
Sumber daya reaktif digunakan untuk memvariasikan kapasitor dalam sistem statis. Respons sistem daya reaktif ditentukan oleh kontrol tegangan dalam kondisi dinamis.
Saat mengoperasikan sistem AC yang tidak stabil, masalah cenderung muncul karena tegangan yang tidak stabil dan lonjakan tegangan berlebih. Koordinasi yang lebih baik dari sumber daya reaktif diperlukan untuk menyederhanakan kontrol sudut tembak. Hasilnya, fitur konverter daya reaktif ini semakin banyak diterapkan di konverter modern yang menggunakan HVDC.
Kontrol Daya Reaktif dalam Kondisi Stabil
Persamaan yang menyatakan daya reaktif sebagai fungsi daya aktif diberikan dalam satuan besaran.
Tegangan konverter dasar diberikan oleh -
$$V_{db}=3\sqrt{\frac{2}{\pi }}\times V_{L}$$Dimana VL = Tegangan saluran ke saluran (pada sisi berliku)
Base DC Current (Idb ) = Nilai Arus DC (Idr)
Base DC Power (Pdc)= n b × V db × I db , dimananb = jumlah jembatan secara seri
BaseBase AC voltage (Vb) = (Va)
Base AC Power = Daya DC Dasar
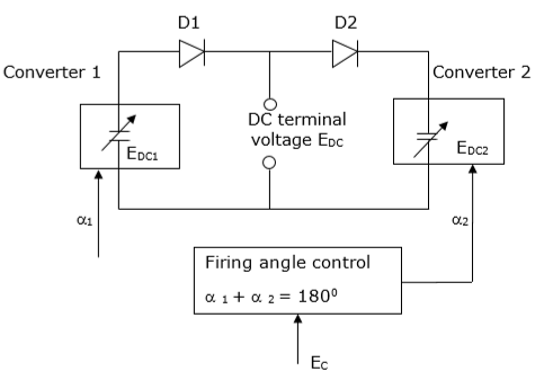
$$\sqrt{\frac{18}{\pi }}\times V_{a}\times I_{db}\times n_{b}$$Konverter ganda terutama ditemukan dalam penggerak kecepatan variabel (VFD). Dalam konverter ganda, dua konverter dihubungkan bersama dari belakang ke belakang. Pengoperasian konverter ganda dijelaskan menggunakan diagram di bawah ini. Diasumsikan bahwa -
Konverter ganda adalah yang ideal (memberikan keluaran DC murni) di terminalnya.
Setiap konverter dua kuadran adalah sumber DC terkontrol secara seri dengan dioda.
Dioda D1 dan D2 menunjukkan aliran arus searah.
Mempertimbangkan konverter ganda yang beroperasi tanpa arus yang bersirkulasi, arus AC dilarang mengalir oleh pulsa pengapian yang dikendalikan. Ini memastikan bahwa konverter yang membawa arus beban berjalan sementara konverter lain diblokir. Ini berarti reaktor antara konverter tidak diperlukan.
Pengisi baterai
Pengisi daya baterai yang juga dikenal sebagai pengisi ulang menggunakan arus listrik untuk menyimpan energi di sel sekunder. Proses pengisian baterai ditentukan oleh jenis dan ukuran baterai. Jenis baterai yang berbeda memiliki tingkat toleransi yang berbeda terhadap pengisian yang berlebihan. Proses pengisian ulang dapat dilakukan dengan menghubungkannya ke sumber tegangan konstan atau arus konstan.
Tingkat Pengisian (C)
Tingkat pengisian didefinisikan sebagai tingkat pengisian atau pengosongan baterai dan sama dengan kapasitas baterai dalam satu jam.
Pengisi daya baterai ditentukan dalam hal kecepatan pengisian C. Misalnya, pengisi daya baterai dengan peringkat C / 10 akan memberikan kapasitas pengisian dalam 10 jam sementara satu dengan peringkat 3C akan mengisi baterai dalam 20 menit.
Jenis Pengisi Daya Baterai
Ada banyak jenis pengisi daya baterai. Dalam tutorial ini, kami akan mempertimbangkan lima tipe utama.
Simple chargers - Beroperasi dengan memasok sumber daya DC konstan ke baterai yang sedang diisi.
Fast chargers - Menggunakan sirkuit kontrol untuk mengisi baterai dengan cepat dan dalam prosesnya mencegah sel baterai dari kerusakan.
Inductive chargers - Menggunakan induksi elektromagnetik untuk mengisi baterai.
Intelligent chargers - Digunakan untuk mengisi baterai yang berisi chip yang berkomunikasi dengannya the pengisi daya pintar.
Motion powered charger- Memanfaatkan gerakan manusia untuk mengisi baterai. Sebuah magnet yang ditempatkan di antara dua pegas digerakkan ke atas dan ke bawah oleh gerakan manusia sehingga mengisi baterai.
Motor DC eksitasi terpisah memiliki parameter berikut: 220V, 100A, dan 1450 rpm. Angkernya memiliki resistansi 0,1 Ω. Selain itu, ini disuplai dari konverter terkontrol penuh 3 fase yang terhubung ke sumber AC 3 fase dengan frekuensi 50 Hz dan reaktansi induktif 0,5 Ω dan 50Hz. Pada α = 0, operasi motor berada pada torsi dan kecepatan terukur. Asumsikan rem motor secara generatif menggunakan arah sebaliknya pada kecepatan tetapannya. Hitung arus maksimum di mana pergantian tidak terpengaruh.
Solution -
Kami tahu itu,
$$V_{db}=3\sqrt{\frac{2}{\pi }}\times V_{L}-\frac{3}{\pi }\times R_{b}\times I_{db}$$Mengganti nilai, kita dapatkan,
$220=3\sqrt{\frac{2}{\pi }}\times V_{L}-\frac{3}{\pi }\times 0.5\times 100$
Karena itu,
$V_{L}=198V$
Tegangan pada kecepatan pengenal = $220-\left ( 100\times 0.1 \right )=210V$
Pada kecepatan terukur, pengereman regeneratif dalam arah sebaliknya,
$=3\sqrt{\frac{2}{\pi }}\times 198\cos \alpha -\left ( \frac{3}{\pi }\times 0.5+0.1\right )\times I_{db}=-210V$
Tapi $\cos \alpha -\cos \left ( \mu +\alpha \right )=\frac{\sqrt{2}}{198}\times 0.5I_{db}$
Agar pergantian gagal, kondisi pembatasan berikut harus dipenuhi.
$\mu +\alpha \approx 180^{\circ}$
Karena itu, $\quad \cos \alpha =\frac{I_{db}}{198\sqrt{2}}-1$
Juga,
$\frac{3}{\pi }I_{db}-\frac{3\sqrt{2}}{\pi }\times 198-\left ( \frac{3}{\pi }\times 0.5+0.1 \right )I_{db}=-210$
Ini memberi, $\quad 0.3771I_{db}=57.4$
Karena itu, $\quad I_{db}=152.2A$
Helikopter menggunakan kecepatan tinggi untuk menghubungkan dan memutuskan sambungan dari beban sumber. Tegangan DC tetap diterapkan sesekali ke beban sumber dengan terus-menerus memicu sakelar daya ON / OFF. Periode waktu di mana sakelar daya tetap ON atau OFF disebut sebagai waktu status ON dan OFF perajang.
Helikopter banyak digunakan pada mobil listrik, konversi energi angin dan matahari, dan regulator motor DC.
Simbol Chopper
Klasifikasi Helikopter
Bergantung pada output tegangan, helikopter diklasifikasikan sebagai -
- Step Up chopper (penguat konverter)
- Step Down Chopper (konverter Buck)
- Step Up / Down Chopper (konverter Buck-boost)
Step Up Chopper
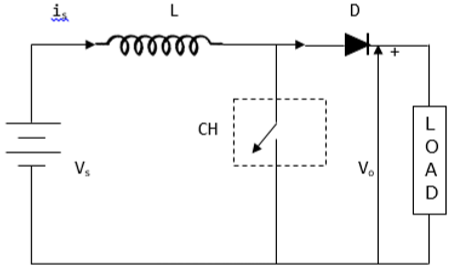
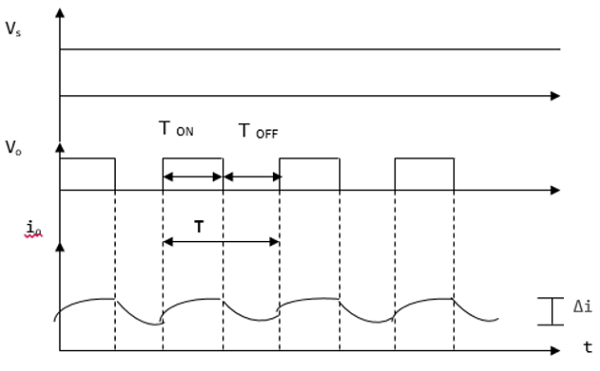
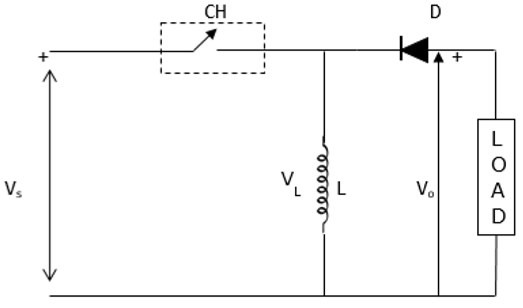
Output tegangan rata-rata (V o ) dalam chopper step up lebih besar dari input tegangan (V s ). Gambar di bawah ini menunjukkan konfigurasi helikopter step up.
Bentuk Gelombang Arus dan Tegangan
V 0 (output tegangan rata-rata) adalah positif ketika pencacah dinyalakan dan negatif ketika pencacah dalam keadaan OFF seperti yang ditunjukkan pada bentuk gelombang di bawah ini.
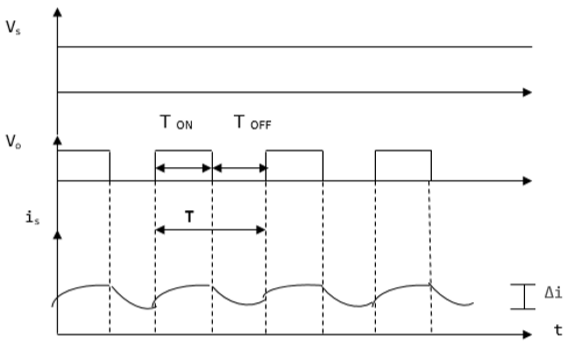
Dimana
T ON - interval waktu saat chopper ON
T OFF - interval waktu saat chopper OFF
V L - Tegangan beban
V s - Tegangan sumber
T - Jangka waktu pemotongan = T ON + T OFF
V o diberikan oleh -
$$V_{0}=\frac{1}{T}\int_{0}^{T_{ON}}V_{S}dt$$Ketika chopper (CH) dinyalakan, beban dihubung pendek dan, oleh karena itu, tegangan output untuk periode tersebut. TONadalah nol. Selain itu, induktor diisi selama waktu ini. Ini memberikan V S = V L
$L\frac{di}{dt}=V_{S},$ $\frac{\Delta i}{T_{ON}}=\frac{V_{S}}{L}$
Karenanya,$\Delta i=\frac{V_{S}}{L}T_{ON}$
Δi = adalah arus puncak ke puncak induktor. Ketika pencacah (CH) dalam keadaan OFF, pelepasan terjadi melalui induktor L. Oleh karena itu, penjumlahan V s dan V L diberikan sebagai berikut -
$V_{0}=V_{S}+V_{L},\quad V_{L}=V_{0}-V_{S}$
Tapi $L\frac{di}{dt}=V_{0}-V_{S}$
Jadi,$L\frac{\Delta i}{T_{OFF}}=V_{0}-V_{S}$
Ini memberi,$\Delta i=\frac{V_{0}-V_{S}}{L}T_{OFF}$
Menyamakan Δi dari keadaan ON ke Δi dari keadaan OFF memberikan -
$\frac{V_{S}}{L}T_{ON}=\frac{V_{0}-V_{S}}{L}T_{OFF}$, $V_{S}\left ( T_{ON}+T_{OFF} \right )=V_{0}T_{OFF}$
$V_{0}=\frac{TV_{S}}{T_{OFF}}=\frac{V_{S}}{\frac{\left ( T+T_{ON} \right )}{T}}$
Ini memberikan keluaran tegangan rata-rata sebagai,
$$V_{0}=\frac{V_{S}}{1-D}$$Persamaan di atas menunjukkan bahwa V o dapat divariasikan dari V S hingga tak terhingga. Ini membuktikan bahwa tegangan keluaran akan selalu lebih dari tegangan masukan dan karenanya, meningkatkan atau meningkatkan level tegangan.
Step Down Chopper
Ini juga dikenal sebagai konverter uang. Dalam chopper ini, rata-rata tegangan output V O kurang dari tegangan input V S . Saat pencacah ON, V O = V S dan saat pencacah mati, V O = 0
Saat helikopter ON -
$V_{S}=\left ( V_{L}+V_{0} \right ),\quad V_{L}=V_{S}-V_{0},\quad L\frac{di}{dt}=V_{S}-V_{0},\quad L\frac{\Delta i}{T_{ON}}=V_{s}+V_{0}$
Dengan demikian, beban arus puncak-ke-puncak diberikan oleh,
$\Delta i=\frac{V_{s}-V_{0}}{L}T_{ON}$
Diagram Sirkuit
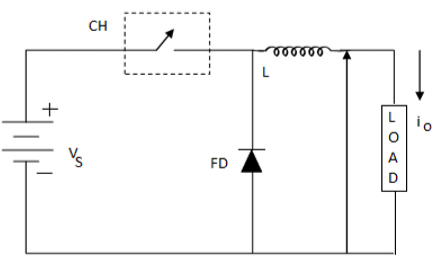
Dimana FD adalah dioda roda bebas.
Ketika pencacah dalam keadaan OFF, pembalikan polaritas dan pelepasan terjadi di induktor. Arus melewati dioda roda bebas dan induktor ke beban. Ini memberi,
$$L\frac{di}{dt}=V_{0}........................................\left ( i \right )$$Ditulis ulang sebagai -$\quad L\frac{\Delta i}{T_{OFF}}=V_{0}$ $$\Delta i=V_{0}\frac{T_{OFF}}{L}...................................\left ( ii \right )$$
Persamaan persamaan (i) dan (ii) memberikan;
$\frac{V_{S}-V_{0}}{L}T_{ON}=\frac{V_{0}}{L}T_{OFF}$
$\frac{V_{S}-V_{0}}{V_{0}}=\frac{T_{OFF}}{T_{ON}}$
$\frac{V_{S}}{V_{0}}=\frac{T_{ON}-T_{OFF}}{T_{ON}}$
Persamaan di atas memberikan;
$$V_{0}=\frac{T_{ON}}{T}V_{S}=DV_{S}$$Persamaan (i) memberikan -
$\Delta i=\frac{V_{S}-DV_{S}}{L}DT$, dari $D=\frac{T_{ON}}{T}$
$=\frac{V_{S}-\left ( 1-D \right )D}{Lf}$
$f=\frac{1}{T}=$frekuensi pemotongan
Bentuk Gelombang Arus dan Tegangan
Bentuk gelombang arus dan tegangan diberikan di bawah ini -
Untuk step down chopper tegangan keluaran selalu lebih kecil dari tegangan masukan. Ini ditunjukkan oleh bentuk gelombang di bawah ini.
Step Up / Step Down Chopper
Ini juga dikenal sebagai konverter buck-boost. Itu memungkinkan untuk menambah atau mengurangi level input tegangan. Diagram di bawah menunjukkan helikopter penambah uang.
Ketika pencacah dinyalakan, induktor L diisi oleh tegangan sumber V s . Oleh karena itu, V s = V L .
$$L\frac{di}{dt}=V_{S}$$ $$\Delta i=\frac{V_{S}}{L}T_{ON}=\frac{V_{S}}{L}T\frac{T_{ON}}{T}=\frac{DV_{S}}{Lf}$$Karena -
$D=\frac{T_{ON}}{T}$ dan $f=\frac{1}{T} .............................................. \left ( iii \right )$
Ketika pencacah dimatikan, polaritas induktor berbalik dan ini menyebabkannya keluar melalui dioda dan beban.
Karenanya,
$$V_{0}=-V_{L}$$ $$L\frac{di}{dt}=-V_{0}$$$L\frac{\Delta i}{T_{OFF}}=-V_{0}$, jadi $\Delta i=-\frac{V_{0}}{L}T_{OFF}................................\left ( iv \right )$
Mengevaluasi persamaan (iii) dan (iv) memberikan -
$\frac{DV_{S}}{Lf}=-\frac{V_{0}}{L}T_{OFF}$, $DV_{S}=-DV_{S}=-V_{0}T_{OFF}f$
$DV_{S}=-V_{0}\frac{T-T_{ON}}{T}=-V_{0}\left ( 1-\frac{T_{ON}}{T} \right )$, $V_{0}=-\frac{DV_{S}}{1-D}$
Karena $D=\frac{T_{ON}}{T}=\frac{T-T_{OFF}}{1-D}$
Ini memberi,
$V_{0}=\frac{DV_{S}}{1-D}$
D dapat divariasikan dari 0 hingga 1. When, D = 0; V O = 0
Saat D = 0,5, V O = V S
Saat, D = 1, V O = ∞.
Oleh karena itu, dalam interval 0 ≤ D ≤ 0,5, tegangan keluaran bervariasi dalam kisaran 0 ≤ V O <V S dan kita mendapatkan operasi step down atau Buck. Sedangkan pada interval 0.5 ≤ D ≤ 1 tegangan output bervariasi pada range V S ≤ V O ≤ ∞ dan kita mendapatkan operasi step up atau Boost.
Dalam konverter, ada dua metode kontrol dasar yang digunakan untuk memvariasikan tegangan keluaran. Ini adalah -
- Kontrol rasio waktu
- Kontrol batas saat ini
Kontrol Rasio Waktu
Dalam kontrol rasio waktu, konstanta k diberikan oleh $\frac{T_{ON}}{T}$bervariasi. Konstanta k disebut rasio tugas. Kontrol rasio waktu dapat dicapai dengan dua cara -
Frekuensi Konstan
Dalam metode kontrol ini, frekuensi (f = 1 / T 0N ) dijaga konstan sedangkan waktu ON T bervariasi. Ini disebut sebagai modulasi lebar pulsa (PWM).
Variabel Frekuensi
Dalam teknik frekuensi variabel, frekuensi (f = 1 / T) divariasikan sedangkan waktu ON T dijaga konstan. Ini disebut sebagai kontrol modulasi frekuensi.
Kontrol Batas Saat Ini
Dalam konverter DC ke DC, nilai arus bervariasi antara maksimum serta level minimum untuk tegangan kontinu. Dalam teknik ini, chopper (sakelar dalam konverter DC ke DC) dinyalakan dan kemudian OFF untuk memastikan bahwa arus dijaga konstan antara batas atas dan bawah. Ketika arus melampaui titik maksimum, helikopter mati.
Saat sakelar dalam keadaan OFF, freewheel saat ini melalui dioda dan turun secara eksponensial. Pencacah dinyalakan ketika arus mencapai level minimum. Metode ini dapat digunakan baik ketika waktu ON T konstan atau ketika frekuensi (f = 1 / T).
Konverter sakelar resonansi mengacu pada konverter yang memiliki jaringan induktor dan kapasitor (LC) dan yang bentuk gelombang arus dan tegangannya bervariasi secara sinusoidal selama setiap periode sakelar. Ada berbagai konverter sakelar resonansi -
- Konverter DC ke DC beresonansi
- Inverter DC ke AC
- Inverter AC resonan ke konverter DC
Dalam tutorial ini, kita akan fokus pada konverter Resonan DC ke DC
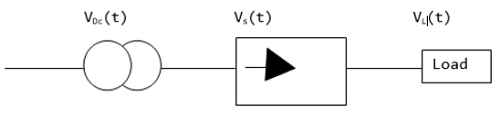
Pengonversi DC ke DC Resonansi
Konsep catu daya mode sakelar (SMPS) dijelaskan di bawah ini menggunakan konverter DC ke DC. Beban diberi suplai tegangan konstan (V OUT ) yang diperoleh dari sumber utama suplai tegangan V IN . Nilai V OUT diatur dengan memvariasikan resistor secara seri (R S ) atau sumber arus yang terhubung dalam shunt ( I S ). Dengan mengontrol V OUT melalui I S yang bervariasi dan memastikan R S tetap konstan, sejumlah besar daya hilang di konverter.

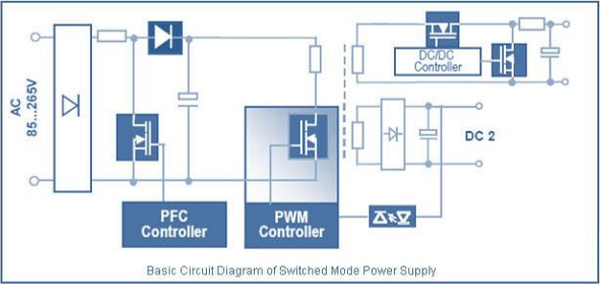
Mode Sakelar Power Supply (SMPS)
SMPS (catu daya mode sakelar) mengacu pada perangkat elektronik yang menggunakan regulator switching untuk tujuan mengubah daya listrik dengan cara yang efisien. SMPS mengambil daya dari saluran listrik utama dan mentransfernya ke beban. Misalnya, komputer sambil memastikan tegangan dan karakteristik arus diubah.
Perbedaan antara SMPS dan catu daya linier adalah bahwa SMPS terus menghidupkan dan mematikan selama disipasi rendah dan menggunakan lebih sedikit waktu selama daerah disipasi tinggi. Ini memastikan lebih sedikit energi yang terbuang. Sebenarnya, SMP tidak menghilangkan daya apa pun.
Ukuran SMP lebih kecil dan sangat ringan, dibandingkan dengan perangkat daya suplai linier normal dengan ukuran dan bentuk yang sama.
Gambar di bawah ini menunjukkan diagram sirkuit untuk sebuah SMP. Ketika frekuensi switching divariasikan, energi yang disimpan dapat divariasikan untuk setiap siklus dan karenanya output tegangan juga bervariasi.
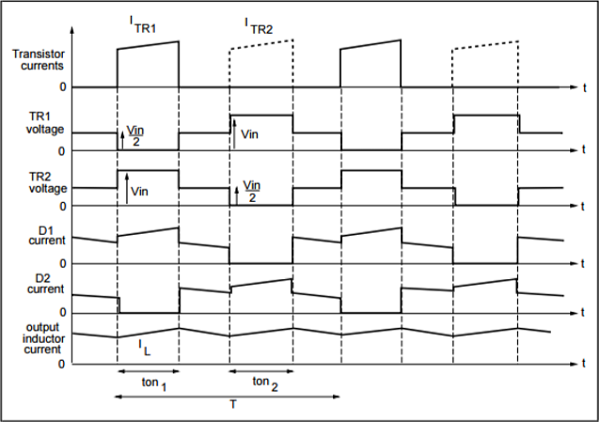
Bentuk gelombang di bawah ini adalah untuk konverter setengah jembatan yang juga dikenal sebagai tarik-dorong. Ini digunakan dalam aplikasi yang memanfaatkan daya tinggi. Tegangan input dibelah dua seperti yang ditunjukkan dalam bentuk gelombang.
Helikopter step up memiliki tegangan input 150V. Output tegangan yang dibutuhkan adalah 450V. Diberikan, bahwa thyristor memiliki waktu konduksi 150μseconds. Hitung frekuensi pemotongan.
Solution −
The chopping frequency (f)
$f=\frac{1}{T}$
Dimana T - Jangka waktu pemotongan = $T_{ON}+T_{OFF}$
Diberikan - $V_{S}=150V$$V_{0}=450V$ $T_{ON}=150\mu sec$
$V_{0}=V_{S\left ( \frac{T}{T-T_{ON}} \right )}$
$450=150\frac{T}{T-150^{-6}}$ $T=225\mu sec$
Oleh karena itu, $f=\frac{1}{225\ast 10^{-6}}=4.44KHz$
The new voltage output, on condition that the operation is at constant frequency after the halving the pulse width.
Membagi dua lebar pulsa memberi -
$$T_{ON}=\frac{150\times 10^{-6}}{2}=75\mu sec$$Frekuensinya konstan,
$$f=4.44KHz$$ $$T=\frac{1}{f}=150\mu sec$$Output tegangan diberikan oleh -
$$V_{0}=V_{S}\left ( \frac{T}{T-T_{ON}} \right )=150\times \left ( \frac{150\times 10^{-6}}{\left ( 150-75 \right )\times 10^{-6}} \right )=300Volts$$Inverter mengacu pada perangkat elektronik daya yang mengubah daya dalam bentuk DC menjadi bentuk AC pada frekuensi dan output tegangan yang diperlukan.
Inverter diklasifikasikan menjadi dua kategori utama -
Voltage Source Inverter (VSI) - Inverter sumber tegangan memiliki tegangan sumber DC kaku yaitu tegangan DC terbatas atau impedansi nol pada terminal masukan inverter.
Current Source Inverter (CSI)- Inverter sumber arus disuplai dengan arus variabel dari sumber DC yang memiliki impedansi tinggi. Gelombang arus yang dihasilkan tidak dipengaruhi oleh beban.
Inverter Fase Tunggal
Ada dua jenis inverter satu fasa - inverter jembatan penuh dan inverter setengah jembatan.
Inverter Setengah Jembatan
Jenis inverter ini adalah blok bangunan dasar dari inverter jembatan penuh. Ini berisi dua sakelar dan masing-masing kapasitornya memiliki output tegangan yang sama$\frac{V_{dc}}{2}$. Selain itu, sakelar saling melengkapi, yaitu, jika satu dinyalakan, yang lain mati.
Inverter Jembatan Penuh
Rangkaian inverter ini mengubah DC menjadi AC. Ini mencapai ini dengan menutup dan membuka sakelar dalam urutan yang benar. Ini memiliki empat status operasi berbeda yang didasarkan pada sakelar mana yang ditutup.
Tiga Fase Inverter
Inverter tiga fase mengubah input DC menjadi output AC tiga fase. Ketiga lengannya biasanya tertunda dengan sudut 120 ° sehingga menghasilkan suplai AC tiga fase. Sakelar inverter masing-masing memiliki rasio 50% dan sakelar terjadi setelah setiap T / 6 dari waktu T (interval sudut 60 °). Sakelar S1 dan S4, sakelar S2 dan S5 dan sakelar S3 dan S6 saling melengkapi.
Gambar di bawah ini menunjukkan rangkaian untuk inverter tiga fasa. Ini tidak lain adalah tiga inverter fase tunggal yang diletakkan di sumber DC yang sama. Tegangan tiang dalam inverter tiga fasa sama dengan tegangan tiang pada inverter jembatan setengah fasa tunggal.

Kedua jenis inverter di atas memiliki dua mode konduksi - 180° mode of conduction dan 120° mode of conduction.
Mode konduksi 180 °
Dalam mode konduksi ini, setiap perangkat berada dalam keadaan konduksi selama 180 ° di mana mereka AKTIF pada interval 60 °. Terminal A, B dan C adalah terminal keluaran jembatan yang terhubung ke delta tiga fase atau koneksi bintang dari beban.
Pengoperasian beban terhubung bintang seimbang dijelaskan dalam diagram di bawah ini. Untuk periode 0 ° - 60 ° titik S1, S5 dan S6 berada dalam mode konduksi. Terminal A dan C dari beban terhubung ke sumber pada titik positifnya. Terminal B terhubung ke sumber pada titik negatifnya. Selain itu, resistansi R / 2 berada di antara ujung netral dan ujung positif sedangkan resistansi R berada di antara terminal netral dan negatif.
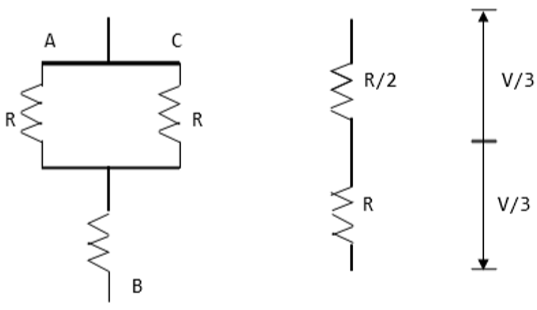
| Tegangan beban diberikan sebagai berikut; V AN = V / 3, V BN = −2V / 3, V CN = V / 3 |
Tegangan saluran diberikan sebagai berikut; V AB = V AN - V BN = V, V BC = V BN - V CN = −V, V CA = V CN - V AN = 0 |
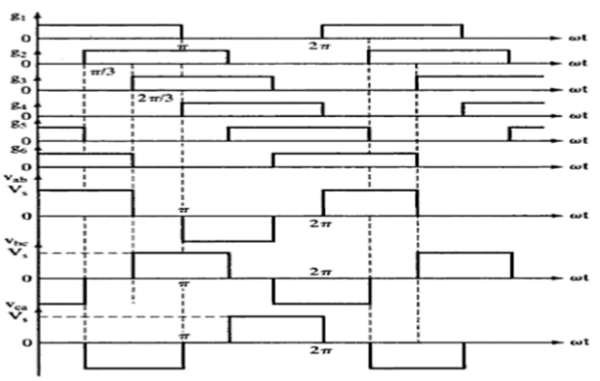
Bentuk gelombang untuk mode konduksi 180 °
Mode konduksi 120 °
Dalam mode konduksi ini, setiap perangkat elektronik berada dalam kondisi konduksi 120 °. Ini paling cocok untuk koneksi delta dalam beban karena menghasilkan jenis bentuk gelombang enam langkah di salah satu fasenya. Oleh karena itu, setiap saat hanya dua perangkat yang berjalan karena masing-masing perangkat hanya bekerja pada 120 °.
Terminal A pada beban dihubungkan ke ujung positif sedangkan terminal B dihubungkan ke ujung negatif sumber. Terminal C pada beban berada dalam kondisi yang disebut floating state. Selanjutnya tegangan fasa sama dengan tegangan beban seperti gambar di bawah ini.
Tegangan fase = Tegangan saluran
V AB = V
V BC = −V / 2
V CA = −V / 2
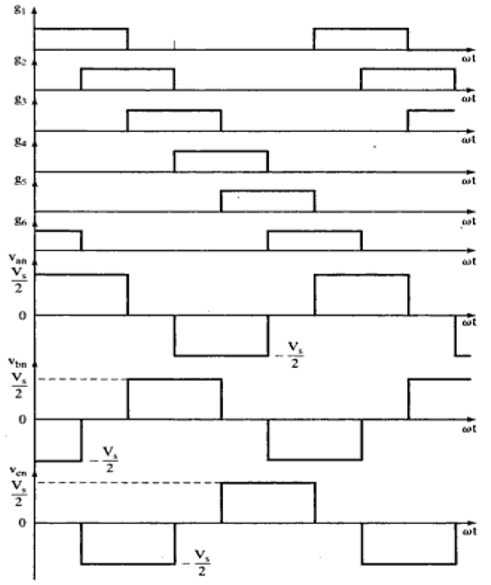
Bentuk gelombang untuk mode konduksi 120 °
PWM adalah teknik yang digunakan untuk mengurangi distorsi harmonisa keseluruhan (THD) pada arus beban. Ini menggunakan gelombang pulsa dalam bentuk persegi panjang / persegi yang menghasilkan nilai bentuk gelombang rata-rata variabel f (t), setelah lebar pulsa dimodulasi. Periode waktu untuk modulasi diberikan oleh T. Oleh karena itu, nilai rata-rata bentuk gelombang diberikan oleh
$$\bar{y}=\frac{1}{T}\int_{0}^{T}f\left ( t \right )dt$$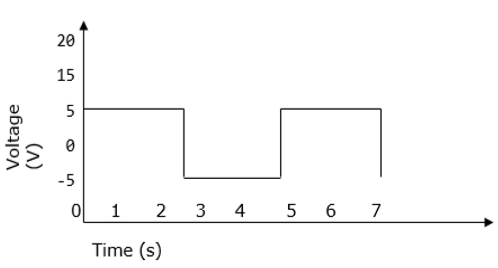
Modulasi Lebar Pulsa Sinusoidal
Pada inverter tegangan sumber sederhana, sakelar dapat dihidupkan dan dimatikan sesuai kebutuhan. Selama setiap siklus, sakelar dihidupkan atau dimatikan satu kali. Ini menghasilkan bentuk gelombang persegi. Namun, jika sakelar dihidupkan beberapa kali, profil harmonik yang ditingkatkan bentuk gelombangnya diperoleh.
Bentuk gelombang PWM sinusoidal diperoleh dengan membandingkan bentuk gelombang termodulasi yang diinginkan dengan bentuk gelombang segitiga frekuensi tinggi. Terlepas dari apakah tegangan sinyal lebih kecil atau lebih besar daripada bentuk gelombang pembawa, tegangan keluaran yang dihasilkan dari bus DC adalah negatif atau positif.
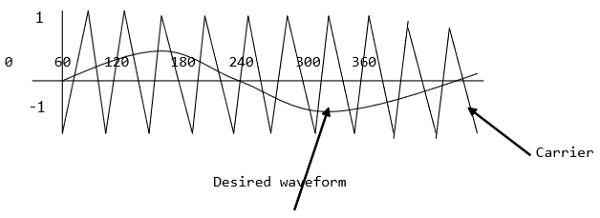
Amplitudo sinusoidal diberikan sebagai A m dan segitiga pembawa dinyatakan sebagai A c . Untuk PWM sinusoidal, indeks modulasi m diberikan oleh A m / A c .
PWM Bentuk Gelombang Sinusoidal yang Dimodifikasi
Bentuk gelombang PWM sinusoidal yang dimodifikasi digunakan untuk kontrol daya dan optimalisasi faktor daya. Konsep utamanya adalah menggeser arus yang tertunda pada jaringan ke jaringan tegangan dengan memodifikasi konverter PWM. Konsekuensinya, terjadi peningkatan efisiensi daya serta optimalisasi faktor daya.
Beberapa PWM
Beberapa PWM memiliki banyak keluaran yang nilainya tidak sama tetapi periode waktu produksinya konstan untuk semua keluaran. Inverter dengan PWM dapat beroperasi pada keluaran tegangan tinggi.

Bentuk gelombang di bawah ini adalah gelombang sinusoidal yang dihasilkan oleh beberapa PWM
Kontrol Tegangan dan Harmonik
Bentuk gelombang periodik yang memiliki frekuensi, yang merupakan beberapa integral dari daya fundamental dengan frekuensi 60Hz dikenal sebagai harmonik. Distorsi harmonik total (THD) di sisi lain mengacu pada kontribusi total dari semua frekuensi arus harmonik.
Harmonik dicirikan oleh denyut nadi yang mewakili jumlah penyearah yang digunakan dalam rangkaian tertentu. Ini dihitung sebagai berikut -
$$h=\left ( n\times P \right )+1 \quad or \quad -1$$Dimana n - adalah bilangan bulat 1, 2, 3, 4… .n
P - Jumlah penyearah
Itu dirangkum dalam tabel di bawah ini -
Harmonic |
Frequency |
| 1st | 60 Hz |
| 2 nd | 120 Hz |
| 3 rd | 180Hz |
| 4 th | 240Hz |
| 5 . . Ke-49 |
300Hz . . 2940Hz |
Harmonik berdampak pada tegangan dan keluaran arus dan dapat dikurangi dengan menggunakan transformator isolasi, reaktor saluran, desain ulang sistem tenaga dan filter harmonik.
Seri Resonant Inverter
Inverter resonansi adalah inverter listrik yang operasinya didasarkan pada osilasi arus resonansi. Di sini, perangkat switching dan komponen resonansi dihubungkan secara seri satu sama lain. Sebagai hasil dari fitur alami rangkaian, arus yang melewati perangkat switching turun menjadi nol.
Jenis inverter ini menghasilkan bentuk gelombang sinusoidal pada frekuensi yang sangat tinggi pada kisaran 20kHz-100kHz. Oleh karena itu, paling cocok untuk aplikasi yang menuntut keluaran tetap seperti pemanas induksi dan pencahayaan fluoresen. Biasanya ukurannya kecil karena frekuensi switchingnya tinggi.
Inverter resonan memiliki banyak konfigurasi dan karenanya dikategorikan menjadi dua kelompok -
- Mereka yang memiliki sakelar searah
- Mereka yang memiliki sakelar dua arah
Inverter setengah jembatan fase tunggal memiliki resistansi 2.5Ω dan tegangan input DC 50V. Hitung yang berikut -
Solution -
a. The RMS voltage occurring at the fundamental frequency
$E_{1RMS}=0.9\times 50V=45V$
b. The power Output
Tegangan keluaran RMS $E_{ORMS}=E=50V$
Daya keluaran $=E^{2}/R=\left ( 50\right )^{2}/2.5=1000W$
c. Peak current and average current
Arus puncak $I_{p}=E_{0}/R=50/2.5=20A$
Arus rata-rata$=I_{p}/2=20/2=10A$
d. Harmonic RMS voltage
$E_{n}=\left \{ \left ( E_{ORMS} \right )^{2}-\left ( E_{1RMS} \right )^{2} \right \}^{0.5}=\left [ 50^{2} -45^{2}\right ]^{0.5}=21.8V$
e. Total harmonic distortion
$E_{n}/E_{1RMS}=21.8/45=0.48\times 100\%=48\%$
Pengontrol AC fase tunggal (pengontrol tegangan) digunakan untuk memvariasikan nilai tegangan bolak-balik setelah diterapkan ke rangkaian beban. Thyristor juga ditempatkan di antara beban dan sumber tegangan AC yang konstan.
Tegangan bolak-balik root mean square diatur dengan mengubah sudut pemicu thyristor. Dalam kasus kontrol fase, thyristor digunakan sebagai sakelar untuk membuat koneksi dari suplai input AC ke sirkuit beban selama setiap siklus input. Untuk setiap tegangan input positif, terjadi pemotongan dan tegangan berkurang.
Diagram Sirkuit dengan Beban Resistif
Selama setengah dari siklus, sakelar thyristor dihidupkan untuk mengaktifkan input tegangan untuk muncul di seluruh beban. Ini diikuti oleh keadaan OFF selama setengah siklus terakhir untuk memutuskan beban dari tegangan sumber.
Saat sudut pemicu α dikontrol, nilai RMS tegangan pada beban juga dikontrol. Sudut pemicu α oleh karena itu, didefinisikan sebagai nilaiωt di mana thyristor akan ON.
Kontrol Urutan Multistage dari Konverter AC
Ketika dua atau lebih tahapan kontrol sekuens terhubung, dimungkinkan untuk memiliki peningkatan faktor daya dan pengurangan lebih lanjut dalam THD (distorsi harmonik total). Konverter kontrol urutan tahap-n memiliki n belitan di bagian sekunder transformator dengan masing-masing pengenal e s / n (tegangan sumber).
Ketika dua konverter AC ditempatkan sejajar satu sama lain, cara urutan nol dibuat. Sedikit perbedaan antara kedua konverter tersebut menyebabkan urutan nol yang besar dalam arus sirkulasi. Diagram di bawah menunjukkan sistem paralel konverter. Arah arus berlawanan arah jarum jam sehubungan dengan sistem tegangan.
Cycloconverter mengacu pada pengubah frekuensi yang dapat mengubah daya AC dari satu frekuensi ke daya AC di frekuensi lain. Proses ini dikenal sebagai konversi AC-AC. Ini terutama digunakan dalam traksi listrik, motor AC memiliki kecepatan variabel dan pemanas induksi.
Cycloconverter dapat mencapai konversi frekuensi dalam satu tahap dan memastikan bahwa tegangan dan frekuensi dapat dikontrol. Selain itu, kebutuhan untuk menggunakan sirkuit pergantian tidak diperlukan karena menggunakan pergantian alami. Transfer daya dalam cycloconverter terjadi dalam dua arah (dua arah).
Masalah utama dengan cycloconverters adalah ketika beroperasi pada arus kecil, ada inefisiensi yang dibuat dengan penundaan penembakan. Lebih lanjut, operasi hanya lancar pada frekuensi yang tidak sama dengan nilai setengah frekuensi masukan. Ini benar karena cycloconverter adalah konverter AC-AC yang dikendalikan fase. Oleh karena itu, untuk memberikan tegangan keluaran AC yang diperlukan, maka harus dilakukan pemilihan segmen masukan tegangan dengan menerapkan pergantian saluran (natural). Ini menjelaskan mengapa frekuensi keluaran lebih rendah dari frekuensi masukan.
Harmonik dalam cycloconverter terutama dipengaruhi oleh metode kontrol, efek tumpang tindih, jumlah pulsa dalam siklus tertentu, mode operasi, dan mode konduksi.
Ada dua jenis cycloconverters−
Step Up cycloconverter - Jenis ini menggunakan pergantian alami dan memberikan output pada frekuensi yang lebih tinggi daripada input.
Step Down cycloconverter - Jenis ini menggunakan pergantian paksa dan menghasilkan output dengan frekuensi lebih rendah daripada input.
Cycloconverter selanjutnya diklasifikasikan menjadi tiga kategori -
Single phase to single-phase- Jenis cycloconverter ini memiliki dua konverter gelombang penuh yang terhubung kembali ke belakang. Jika satu konverter sedang beroperasi, yang lain dinonaktifkan, tidak ada arus yang melewatinya.
Three-phase to single-phase - Cycloconverter ini beroperasi dalam empat kuadran yaitu (+ V, + I) dan (−V, −I) menjadi mode rektifikasi dan (+ V, −I) dan (−V, + I) menjadi mode inversi.
Three-phase to three-phase - Jenis cycloconverter ini banyak digunakan dalam sistem mesin AC yang beroperasi pada mesin induksi tiga fasa dan sinkron.
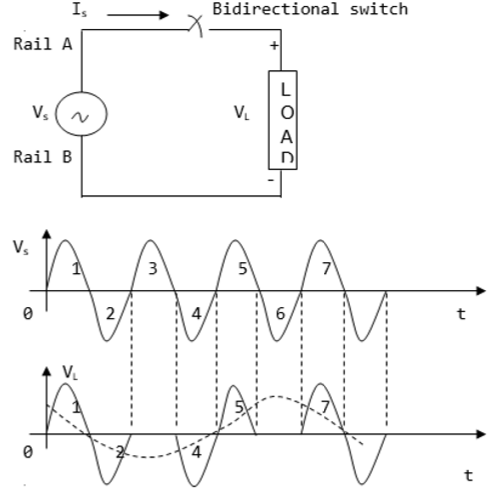
Pengontrol siklus integral adalah konverter dengan kemampuan untuk melakukan peralihan langsung tanpa kehilangan. Proses konversi AC menjadi AC secara langsung tanpa harus melakukan proses perantara dari AC ke DC kemudian DC ke AC.
Siklus kendali integral dasar bersifat sinusoidal. Ini beroperasi dengan menggabungkan dan menghilangkan setengah siklus frekuensi yang lebih tinggi dari input AC. Pengontrol biasanya, DIAKTIFKAN dari OFF selama setengah siklus di mana input tegangan berada pada nol karena hanya siklus penuh atau setengah yang digunakan. Oleh karena itu, rangkaian siklus integral mencapai switching pada tegangan nol tanpa memerlukan rangkaian resonansi.
Diagram di bawah ini menunjukkan pengontrol siklus integral sederhana. Ini berisi beban dan sakelar daya, yang melakukan konversi langsung. Diagram ini menunjukkan konversi frekuensi sumber dari faktor tiga menjadi satu.
Kontrol Faktor Daya
Kontrol faktor daya, juga dikenal sebagai koreksi faktor daya, adalah proses pengurangan jumlah daya reaktif. Perangkat elektronika daya yang digunakan dalam hal ini disebut pengontrol faktor daya (PFC). Dari segitiga daya (yang terdiri dari daya reaktif, nyata, dan semu), daya reaktif berada pada sudut siku-siku (90 °) ke daya sebenarnya dan digunakan untuk memberi energi pada medan magnet. Meskipun daya reaktif tidak memiliki nilai riil pada peralatan elektronik, tagihan listrik terdiri dari biaya daya nyata dan reaktif. Ini membuatnya perlu memiliki pengontrol faktor daya di perangkat elektronik.
Faktor daya (k) didefinisikan sebagai perbandingan daya nyata (dalam kW) dengan daya reaktif (dalam kVAr). Nilainya berkisar dari 0 hingga 1. Jika suatu perangkat memiliki faktor daya 0,8 ke atas, dikatakan menggunakan daya secara efisien. Memasukkan PFC memastikan faktor daya berkisar antara 0,95 hingga 0,99. Pengontrol faktor daya terutama digunakan pada peralatan industri untuk meminimalkan daya reaktif yang dihasilkan oleh lampu fluoresen dan motor listrik.
Untuk memastikan faktor daya ditingkatkan tanpa menyebabkan distorsi harmonik, kapasitor konvensional tidak boleh digunakan. Sebagai gantinya, filter (kombinasi kapasitor dan reaktor) untuk penekan harmonik digunakan. Gambar di bawah ini menunjukkan filter harmonik.
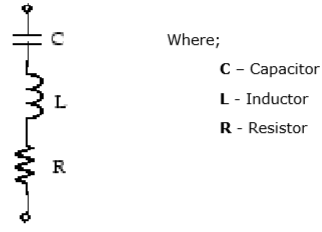
Jenis filter harmonik di atas disebut sebagai filter yang disetel tunggal. Faktor kualitas Q dari filter ini didefinisikan sebagai faktor kualitas reaktansinya (X L ) pada Q (frekuensi tuning) dimana Q diberikan oleh (nX L / R).
Pengonversi matriks didefinisikan sebagai pengonversi dengan satu tahap konversi. Ini menggunakan sakelar terkontrol dua arah untuk mencapai konversi daya otomatis dari AC ke AC. Ini memberikan alternatif untuk penyearah tegangan PWM (dua sisi).
Konverter matriks dicirikan oleh bentuk gelombang sinusoidal yang menunjukkan frekuensi switching input dan output. Sakelar dua arah memungkinkan untuk memiliki input faktor daya yang dapat dikontrol. Selain itu, kurangnya tautan DC memastikannya memiliki desain yang kompak. Kelemahan dari konverter matriks adalah bahwa mereka tidak memiliki sakelar bilateral yang sepenuhnya terkontrol dan dapat beroperasi pada frekuensi tinggi. Rasio tegangannya yang merupakan tegangan output ke input dibatasi.
Ada tiga metode kontrol konverter matriks -
- Modulasi vektor ruang
- Modulasi lebar pulsa
- Venturi - analisis transfer fungsi
Sirkuit Pengubah Matriks
Diagram yang diberikan di bawah ini menunjukkan konverter matriks satu fasa.

Ini berisi empat sakelar dua arah dengan masing-masing sakelar memiliki kemampuan untuk melakukan baik dalam pemblokiran maju dan tegangan balik.
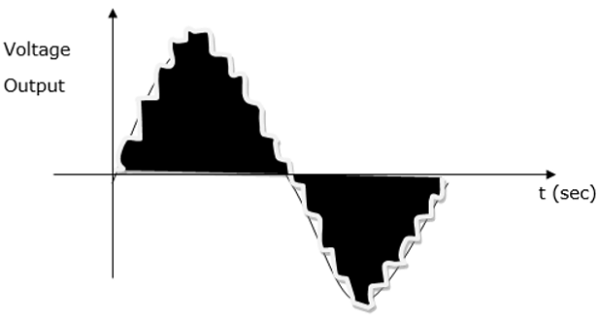
Modulasi Vektor Ruang (SVM)
SVM mengacu pada metode algoritma yang digunakan untuk mengontrol PWM. Ini menciptakan bentuk gelombang AC yang menggerakkan motor AC pada berbagai kecepatan. Dalam kasus inverter tiga fase yang memiliki daya catu DC, tiga kaki utamanya pada keluaran dihubungkan ke motor 3 fase.
Sakelar berada di bawah kendali untuk memastikan bahwa tidak ada dua sakelar di kaki yang sama yang AKTIF pada saat yang bersamaan. Status ON secara bersamaan dapat menyebabkan korsleting suplai DC. Ini mengarah ke delapan vektor switching di mana dua adalah nol dan enam adalah vektor aktif untuk switching.
Konverter tegangan AC fase tunggal memiliki detail berikut -
Waktu ON = 6 menit, waktu OFF = 4 menit, frekuensi = 50Hz, dan
Sumber tegangan V o = 110V
Hitung berikut ini.
Sudut pemicu α
Solution -
$T=2\times \left ( T_{ON}+T_{OFF} \right )$ tapi $f=50Hz,$ $T=2\times \left ( 6+4 \right )=20mins$
$360^{\circ}=20min,$ $1min=18^{\circ}$
Karena itu, $T_{OFF}=4min$
Kemudian,
$$\alpha =\frac{4}{0.1}\times 1.8=72^{\circ}$$Output Tegangan
Solution -
$$V_{0}=\left ( V_{S}\times D \right ),\quad where \quad D=\frac{T_{ON}}{T_{ON}+T_{OFF}}=\frac{6}{10}=0.6$$ $$T_{ON}=6min,\quad T_{OFF}=4 min,\quad V_{S}=110V$$ $$V_{0}\left ( Voltage Output \right )=V_{S}\times D=110\times 0.6=66Volts$$