Inteligência Artificial - Guia Rápido
Desde a invenção dos computadores ou das máquinas, sua capacidade de realizar várias tarefas cresceu exponencialmente. Os humanos desenvolveram o poder dos sistemas de computador em termos de seus diversos domínios de trabalho, sua velocidade crescente e tamanho reduzido em relação ao tempo.
Um ramo da Ciência da Computação denominado Inteligência Artificial busca criar computadores ou máquinas tão inteligentes quanto seres humanos.
O que é Inteligência Artificial?
Segundo o pai da Inteligência Artificial, John McCarthy, é “A ciência e a engenharia de fazer máquinas inteligentes, principalmente programas de computador inteligentes”.
Inteligência Artificial é uma forma de making a computer, a computer-controlled robot, or a software think intelligently, da mesma maneira que os humanos inteligentes pensam.
A IA é realizada estudando como o cérebro humano pensa e como os humanos aprendem, decidem e trabalham enquanto tentam resolver um problema e, em seguida, usam os resultados deste estudo como base para desenvolver software e sistemas inteligentes.
Filosofia da IA
Ao explorar o poder dos sistemas de computador, a curiosidade do ser humano, o leva a se perguntar: "Uma máquina pode pensar e se comportar como os humanos?"
Assim, o desenvolvimento da IA começou com a intenção de criar inteligência semelhante em máquinas que encontramos e consideramos alta nos humanos.
Objetivos de IA
To Create Expert Systems - Os sistemas que apresentam comportamento inteligente, aprendem, demonstram, explicam e aconselham seus usuários.
To Implement Human Intelligence in Machines - Criar sistemas que entendam, pensem, aprendam e se comportem como humanos.
O que contribui para a IA?
Inteligência artificial é uma ciência e tecnologia baseada em disciplinas como Ciência da Computação, Biologia, Psicologia, Lingüística, Matemática e Engenharia. Um grande impulso da IA está no desenvolvimento de funções de computador associadas à inteligência humana, como raciocínio, aprendizado e solução de problemas.
Das seguintes áreas, uma ou várias áreas podem contribuir para construir um sistema inteligente.
Programação sem e com IA
A programação sem e com IA é diferente das seguintes maneiras -
| Programação sem IA | Programação com IA |
|---|---|
| Um programa de computador sem IA pode responder ao specific questões que pretende resolver. | Um programa de computador com IA pode responder ao generic questões que pretende resolver. |
| Modificações no programa levam a mudanças em sua estrutura. | Os programas de IA podem absorver novas modificações ao juntar informações altamente independentes. Portanto, você pode modificar até mesmo um pequeno pedaço de informação do programa sem afetar sua estrutura. |
| A modificação não é rápida e fácil. Pode levar a afetar negativamente o programa. | Modificação rápida e fácil do programa. |
O que é técnica de IA?
No mundo real, o conhecimento tem algumas propriedades indesejáveis -
- Seu volume é enorme, quase inimaginável.
- Não está bem organizado ou formatado.
- Ele muda constantemente.
A técnica de IA é uma maneira de organizar e usar o conhecimento de forma eficiente de forma que -
- Deve ser perceptível pelas pessoas que o fornecem.
- Deve ser facilmente modificável para corrigir erros.
- Deve ser útil em muitas situações, embora seja incompleto ou impreciso.
As técnicas de IA aumentam a velocidade de execução do programa complexo com o qual está equipado.
Aplicações de IA
A IA tem sido dominante em vários campos, como -
Gaming - AI desempenha um papel crucial em jogos estratégicos como xadrez, pôquer, jogo da velha, etc., onde a máquina pode pensar em um grande número de posições possíveis com base no conhecimento heurístico.
Natural Language Processing - É possível interagir com o computador que entende a linguagem natural falada pelo homem.
Expert Systems- Existem alguns aplicativos que integram máquina, software e informações especiais para transmitir raciocínio e aconselhamento. Eles fornecem explicações e conselhos aos usuários.
Vision Systems- Esses sistemas entendem, interpretam e compreendem a entrada visual do computador. Por exemplo,
Um avião espião tira fotos, que são usadas para descobrir informações espaciais ou mapear as áreas.
Os médicos usam o sistema especialista clínico para diagnosticar o paciente.
A polícia usa um software de computador que pode reconhecer o rosto do criminoso com o retrato armazenado feito pelo artista forense.
Speech Recognition- Alguns sistemas inteligentes são capazes de ouvir e compreender a linguagem em termos de frases e seus significados enquanto um humano fala com ela. Ele pode lidar com diferentes sotaques, gírias, ruído de fundo, mudança no ruído humano devido ao frio, etc.
Handwriting Recognition- O software de reconhecimento de escrita lê o texto escrito no papel por uma caneta ou na tela por uma caneta. Ele pode reconhecer as formas das letras e convertê-las em texto editável.
Intelligent Robots- Os robôs são capazes de realizar as tarefas atribuídas por um humano. Eles têm sensores para detectar dados físicos do mundo real, como luz, calor, temperatura, movimento, som, impacto e pressão. Eles têm processadores eficientes, vários sensores e grande memória, para exibir inteligência. Além disso, eles são capazes de aprender com seus erros e podem se adaptar ao novo ambiente.
História da IA
Aqui está a história da IA durante o século 20 -
| Ano | Marco / inovação |
|---|---|
| 1923 | A peça de Karel Čapek chamada “Rossum's Universal Robots” (RUR) estreia em Londres, primeiro uso da palavra “robô” em inglês. |
| 1943 | Lançadas as bases para redes neurais. |
| 1945 | Isaac Asimov, um ex-aluno da Columbia University, cunhou o termo Robótica . |
| 1950 | Alan Turing apresentou o Teste de Turing para avaliação de inteligência e publicou Computing Machinery and Intelligence. Claude Shannon publicou a Análise Detalhada do Jogo de Xadrez como uma pesquisa. |
| 1956 | John McCarthy cunhou o termo Inteligência Artificial . Demonstração do primeiro programa de IA em execução na Carnegie Mellon University. |
| 1958 | John McCarthy inventa a linguagem de programação LISP para IA. |
| 1964 | A dissertação de Danny Bobrow no MIT mostrou que os computadores podem entender a linguagem natural bem o suficiente para resolver problemas de álgebra corretamente. |
| 1965 | Joseph Weizenbaum, do MIT, construiu ELIZA , um problema interativo que dialoga em inglês. |
| 1969 | Cientistas do Stanford Research Institute desenvolveram Shakey , um robô equipado com locomoção, percepção e solução de problemas. |
| 1973 | O grupo de Robótica de Montagem da Universidade de Edimburgo construiu Freddy , o Famoso Robô Escocês, capaz de usar a visão para localizar e montar modelos. |
| 1979 | O primeiro veículo autônomo controlado por computador, Stanford Cart, foi construído. |
| 1985 | Harold Cohen criou e demonstrou o programa de desenho Aaron . |
| 1990 | Grandes avanços em todas as áreas da IA -
|
| 1997 | O Deep Blue Chess Program derrota o então campeão mundial de xadrez, Garry Kasparov. |
| 2000 | Animais de estimação de robôs interativos tornam-se disponíveis comercialmente. O MIT exibe Kismet , um robô com um rosto que expressa emoções. O robô Nomad explora regiões remotas da Antártica e localiza meteoritos. |
Ao estudar inteligência artificial, você precisa saber o que é inteligência. Este capítulo cobre a ideia de inteligência, tipos e componentes da inteligência.
O que é inteligência?
A capacidade de um sistema de calcular, raciocinar, perceber relações e analogias, aprender com a experiência, armazenar e recuperar informações da memória, resolver problemas, compreender ideias complexas, usar linguagem natural com fluência, classificar, generalizar e adaptar novas situações.
Tipos de Inteligência
Conforme descrito por Howard Gardner, um psicólogo do desenvolvimento americano, a Inteligência vem em múltiplas -
| Inteligência | Descrição | Exemplo |
|---|---|---|
| Inteligência linguística | A capacidade de falar, reconhecer e usar mecanismos de fonologia (sons da fala), sintaxe (gramática) e semântica (significado). | Narradores, oradores |
| Inteligência musical | A capacidade de criar, comunicar e compreender os significados do som, compreensão do tom, ritmo. | Músicos, cantores, compositores |
| Inteligência lógico-matemática | A capacidade de usar e compreender relacionamentos na ausência de ação ou objetos. Compreender ideias complexas e abstratas. | Matemáticos, Cientistas |
| Inteligência espacial | A capacidade de perceber informações visuais ou espaciais, alterá-las e recriar imagens visuais sem referência aos objetos, construir imagens 3D e movê-las e girá-las. | Leitores de mapas, astronautas, físicos |
| Inteligência corporal cinestésica | A capacidade de usar todo ou parte do corpo para resolver problemas ou produtos de moda, controlar habilidades motoras finas e grosseiras e manipular objetos. | Jogadores, dançarinos |
| Inteligência intra-pessoal | A capacidade de distinguir entre os próprios sentimentos, intenções e motivações. | Gautam Buddhha |
| Inteligência interpessoal | A capacidade de reconhecer e fazer distinções entre os sentimentos, crenças e intenções de outras pessoas. | Comunicadores de massa, entrevistadores |
Você pode dizer que uma máquina ou sistema é artificially intelligent quando está equipado com pelo menos uma e no máximo todas as inteligências nele.
De que é composta a inteligência?
A inteligência é intangível. É composto por -
- Reasoning
- Learning
- Solução de problemas
- Perception
- Inteligência Lingüística

Vamos examinar todos os componentes brevemente -
Reasoning- É o conjunto de processos que nos permite fornecer base para julgamento, tomada de decisões e previsão. Existem basicamente dois tipos -
| Raciocínio indutivo | Raciocínio dedutivo |
|---|---|
| Ele realiza observações específicas para fazer declarações gerais gerais. | Ele começa com uma declaração geral e examina as possibilidades de se chegar a uma conclusão lógica específica. |
| Mesmo que todas as premissas sejam verdadeiras em uma afirmação, o raciocínio indutivo permite que a conclusão seja falsa. | Se algo é verdade para uma classe de coisas em geral, também é verdade para todos os membros dessa classe. |
| Exemplo - "Nita é uma professora. Nita é estudiosa. Portanto, todos os professores são estudiosos." | Exemplo - “Todas as mulheres com mais de 60 anos são avós. Shalini tem 65 anos. Portanto, Shalini é avó”. |
Learning- É a atividade de adquirir conhecimento ou habilidade estudando, praticando, sendo ensinado ou experimentando algo. A aprendizagem aumenta a consciência dos sujeitos do estudo.
A capacidade de aprendizagem é possuída por humanos, alguns animais e sistemas habilitados para IA. A aprendizagem é categorizada como -
Auditory Learning- É aprender ouvindo e ouvindo. Por exemplo, alunos ouvindo palestras em áudio gravadas.
Episodic Learning- Aprender lembrando-se de sequências de eventos que alguém testemunhou ou experimentou. Isso é linear e ordenado.
Motor Learning- É aprender pelo movimento preciso dos músculos. Por exemplo, escolher objetos, escrever, etc.
Observational Learning- Aprender observando e imitando os outros. Por exemplo, a criança tenta aprender imitando seu pai.
Perceptual Learning- É aprender a reconhecer estímulos que já se viu. Por exemplo, identificar e classificar objetos e situações.
Relational Learning- Envolve aprender a diferenciar entre vários estímulos com base em propriedades relacionais, ao invés de propriedades absolutas. Por exemplo, adicionar um pouco menos de sal na hora de cozinhar batatas que ficaram salgadas da última vez, quando cozidas com adição, digamos de uma colher de sopa de sal.
Spatial Learning - É aprender por meio de estímulos visuais, como imagens, cores, mapas, etc. Por exemplo, uma pessoa pode criar um roteiro em mente antes de realmente seguir a estrada.
Stimulus-Response Learning- É aprender a realizar um determinado comportamento quando um determinado estímulo está presente. Por exemplo, um cachorro levanta a orelha ao ouvir a campainha.
Problem Solving - É o processo em que se percebe e tenta chegar a uma solução desejada a partir de uma situação presente, tomando algum caminho, que está bloqueado por obstáculos conhecidos ou desconhecidos.
A resolução de problemas também inclui decision making, que é o processo de selecionar a alternativa mais adequada entre várias alternativas para atingir a meta desejada.
Perception - É o processo de aquisição, interpretação, seleção e organização da informação sensorial.
A percepção presume sensing. Em humanos, a percepção é auxiliada por órgãos sensoriais. No domínio da IA, o mecanismo de percepção reúne os dados adquiridos pelos sensores de maneira significativa.
Linguistic Intelligence- É a habilidade de usar, compreender, falar e escrever a linguagem verbal e escrita. É importante na comunicação interpessoal.
Diferença entre inteligência humana e máquina
Os humanos percebem por padrões, enquanto as máquinas percebem por um conjunto de regras e dados.
Os humanos armazenam e recuperam informações por meio de padrões, enquanto as máquinas fazem isso pesquisando algoritmos. Por exemplo, o número 40404040 é fácil de lembrar, armazenar e recuperar, pois seu padrão é simples.
Os humanos podem descobrir o objeto completo, mesmo se alguma parte dele estiver faltando ou distorcida; enquanto as máquinas não podem fazer isso corretamente.
O domínio da inteligência artificial é enorme em largura e largura. Ao prosseguir, consideramos as áreas de pesquisa amplamente comuns e prósperas no domínio da IA -

Fala e Reconhecimento de Voz
Ambos os termos são comuns em robótica, sistemas especialistas e processamento de linguagem natural. Embora esses termos sejam usados alternadamente, seus objetivos são diferentes.
| Reconhecimento de fala | Reconhecimento de voz |
|---|---|
| O reconhecimento de fala visa a compreensão e compreensão WHAT foi falado. | O objetivo do reconhecimento de voz é reconhecer WHO está falando. |
| É usado em computação manual, mapa ou navegação de menu. | É usado para identificar uma pessoa analisando seu tom, tom de voz e sotaque, etc. |
| A máquina não precisa de treinamento para reconhecimento de fala, pois não depende do alto-falante. | Este sistema de reconhecimento precisa de treinamento, pois é orientado para a pessoa. |
| Os sistemas de reconhecimento de voz independentes do locutor são difíceis de desenvolver. | Os sistemas de reconhecimento de fala dependentes de alto-falante são comparativamente fáceis de desenvolver. |
Funcionamento de sistemas de reconhecimento de voz e voz
A entrada do usuário falada em um microfone vai para a placa de som do sistema. O conversor transforma o sinal analógico em sinal digital equivalente para o processamento da fala. O banco de dados é usado para comparar os padrões de som para reconhecer as palavras. Finalmente, um feedback reverso é fornecido ao banco de dados.
Este texto no idioma de origem se torna uma entrada para o Mecanismo de Tradução, que o converte no texto do idioma de destino. Eles são suportados com GUI interativa, grande banco de dados de vocabulário, etc.
Aplicações de áreas de pesquisa na vida real
Existe uma grande variedade de aplicações onde a IA está servindo pessoas comuns em suas vidas diárias -
| Sr. Não. | Áreas de Pesquisa | Aplicativo da vida real |
|---|---|---|
| 1 | Expert Systems Exemplos - Sistemas de rastreamento de voo, Sistemas clínicos. |

|
| 2 | Natural Language Processing Exemplos: recurso Google Now, reconhecimento de fala, saída automática de voz. |

|
| 3 | Neural Networks Exemplos - sistemas de reconhecimento de padrões, como reconhecimento de rosto, reconhecimento de caracteres, reconhecimento de caligrafia. |

|
| 4 | Robotics Exemplos - robôs industriais para movimentação, pulverização, pintura, verificação de precisão, perfuração, limpeza, revestimento, escultura, etc. |

|
| 5 | Fuzzy Logic Systems Exemplos - eletrônicos de consumo, automóveis, etc. |

|
Classificação de tarefas de IA
O domínio da IA é classificado em Formal tasks, Mundane tasks, e Expert tasks.

| Domínios de tarefas de inteligência artificial | ||
|---|---|---|
| Tarefas mundanas (comuns) | Tarefas Formais | Tarefas de Especialista |
Percepção
|
|
|
Processamento de linguagem natural
|
Jogos
|
Análise Científica |
| Senso comum | Verificação | Analise financeira |
| Raciocínio | Prova de Teorema | Diagnóstico médico |
| Planing | Criatividade | |
Robótica
|
||
Humanos aprendem mundane (ordinary) tasksdesde seu nascimento. Eles aprendem por percepção, fala, usando a linguagem e locomotivas. Eles aprendem Tarefas Formais e Tarefas Especializadas posteriormente, nessa ordem.
Para os humanos, as tarefas mundanas são mais fáceis de aprender. O mesmo era considerado verdadeiro antes de tentar implementar tarefas mundanas em máquinas. Anteriormente, todo o trabalho de IA estava concentrado no domínio da tarefa mundana.
Mais tarde, descobriu-se que a máquina requer mais conhecimento, representação de conhecimento complexa e algoritmos complicados para lidar com tarefas mundanas. Esta é a razãowhy AI work is more prospering in the Expert Tasks domain agora, como o domínio da tarefa especialista precisa de conhecimento especializado sem bom senso, que pode ser mais fácil de representar e manipular.
Um sistema de IA é composto por um agente e seu ambiente. Os agentes atuam em seu ambiente. O ambiente pode conter outros agentes.
O que são Agente e Ambiente?
A agent é qualquer coisa que pode perceber seu ambiente por meio sensors e age naquele ambiente por meio effectors.
UMA human agent tem órgãos sensoriais, como olhos, ouvidos, nariz, língua e pele paralelos aos sensores, e outros órgãos, como mãos, pernas, boca, para efetores.
UMA robotic agent substitui câmeras e telêmetros infravermelhos para os sensores e vários motores e atuadores para efetores.
UMA software agent codificou cadeias de bits como seus programas e ações.

Terminologia do Agente
Performance Measure of Agent - São os critérios que determinam o grau de sucesso de um agente.
Behavior of Agent - É a ação que o agente realiza após uma determinada sequência de percepções.
Percept - São as entradas perceptivas do agente em uma determinada instância.
Percept Sequence - É a história de tudo que um agente percebeu até hoje.
Agent Function - É um mapa da sequência de preceitos a uma ação.
Racionalidade
A racionalidade nada mais é do que o status de ser razoável, sensato e ter bom senso de julgamento.
A racionalidade está relacionada com as ações e resultados esperados, dependendo do que o agente percebeu. Realizar ações com o objetivo de obter informações úteis é uma parte importante da racionalidade.
O que é Ideal Rational Agent?
Um agente racional ideal é aquele que é capaz de fazer as ações esperadas para maximizar sua medida de desempenho, com base em -
- Sua seqüência de percepção
- Sua base de conhecimento integrada
A racionalidade de um agente depende do seguinte -
o performance measures, que determinam o grau de sucesso.
Do agente Percept Sequence até agora.
Do agente prior knowledge about the environment.
o actions que o agente pode realizar.
Um agente racional sempre executa a ação correta, onde a ação correta significa a ação que faz com que o agente tenha mais sucesso na sequência de percepção dada. O problema que o agente resolve é caracterizado por Medida de Desempenho, Ambiente, Atuadores e Sensores (PEAS).
A Estrutura dos Agentes Inteligentes
A estrutura do agente pode ser vista como -
- Agente = Arquitetura + Programa de Agente
- Arquitetura = a máquina na qual um agente executa.
- Programa do Agente = uma implementação de uma função do agente.
Agentes de reflexo simples
- Eles escolhem ações apenas com base na percepção atual.
- Eles são racionais apenas se uma decisão correta for tomada apenas com base no preceito atual.
- Seu ambiente é completamente observável.
Condition-Action Rule - É uma regra que mapeia um estado (condição) para uma ação.

Agentes de reflexo baseados em modelos
Eles usam um modelo do mundo para escolher suas ações. Eles mantêm um estado interno.
Model - conhecimento sobre “como as coisas acontecem no mundo”.
Internal State - É uma representação de aspectos não observados do estado atual dependendo do histórico de percepção.
Updating the state requires the information about −
- Como o mundo evolui.
- Como as ações do agente afetam o mundo.

Agentes baseados em metas
Eles escolhem suas ações a fim de atingir metas. A abordagem baseada em metas é mais flexível do que o agente reflexo, uma vez que o conhecimento que suporta uma decisão é explicitamente modelado, permitindo, assim, modificações.
Goal - É a descrição de situações desejáveis.

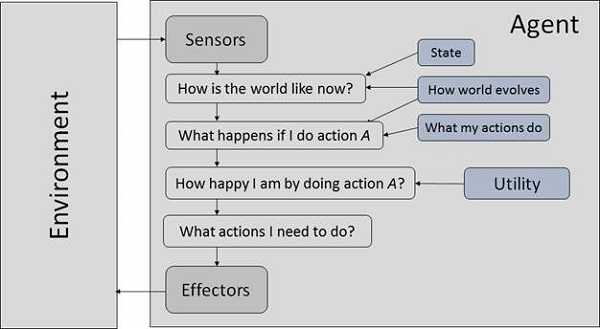
Agentes baseados em utilidades
Eles escolhem ações com base em uma preferência (utilidade) para cada estado.
As metas são inadequadas quando -
Existem objetivos conflitantes, dos quais apenas alguns podem ser alcançados.
Metas têm alguma incerteza de serem alcançadas e você precisa pesar a probabilidade de sucesso em relação à importância de uma meta.
A natureza dos ambientes
Alguns programas operam inteiramente artificial environment confinado à entrada do teclado, banco de dados, sistemas de arquivos de computador e saída de caracteres em uma tela.
Em contraste, alguns agentes de software (robôs de software ou softbots) existem em domínios de softbots ricos e ilimitados. O simulador tem umvery detailed, complex environment. O agente de software precisa escolher entre uma grande variedade de ações em tempo real. Um softbot projetado para escanear as preferências online do cliente e mostrar itens interessantes para o cliente trabalha noreal bem como um artificial meio Ambiente.
O mais famoso artificial environment é o Turing Test environment, em que um agente real e outro artificial são testados em igualdade de condições. Este é um ambiente muito desafiador, pois é altamente difícil para um agente de software funcionar tão bem quanto para um ser humano.
Teste de Turing
O sucesso de um comportamento inteligente de um sistema pode ser medido com o Teste de Turing.
Duas pessoas e uma máquina a ser avaliada participam do teste. Das duas pessoas, uma desempenha o papel de testador. Cada um deles fica em quartos diferentes. O testador não sabe quem é máquina e quem é humano. Ele interroga as perguntas digitando e enviando-as para ambas as inteligências, às quais recebe respostas digitadas.
Este teste visa enganar o testador. Se o testador não consegue determinar a resposta da máquina a partir da resposta humana, então a máquina é considerada inteligente.
Propriedades do ambiente
O ambiente tem propriedades múltiplas -
Discrete / Continuous- Se houver um número limitado de estados distintos e claramente definidos do ambiente, o ambiente é discreto (por exemplo, xadrez); caso contrário, é contínuo (por exemplo, dirigir).
Observable / Partially Observable- Se é possível determinar o estado completo do ambiente em cada ponto do tempo a partir das percepções, ele é observável; caso contrário, é apenas parcialmente observável.
Static / Dynamic- Se o ambiente não muda enquanto um agente está agindo, então ele é estático; caso contrário, é dinâmico.
Single agent / Multiple agents - O ambiente pode conter outros agentes que podem ser do mesmo tipo ou de tipo diferente do agente.
Accessible / Inaccessible - Se o aparelho sensorial do agente pode ter acesso ao estado completo do ambiente, então o ambiente é acessível a esse agente.
Deterministic / Non-deterministic- Se o próximo estado do ambiente for completamente determinado pelo estado atual e pelas ações do agente, então o ambiente é determinístico; caso contrário, é não determinístico.
Episodic / Non-episodic- Em um ambiente episódico, cada episódio consiste no agente percebendo e então agindo. A qualidade de sua ação depende apenas do episódio em si. Os episódios subsequentes não dependem das ações dos episódios anteriores. Ambientes episódicos são muito mais simples porque o agente não precisa pensar no futuro.
Pesquisar é a técnica universal de resolução de problemas em IA. Existem alguns jogos para um único jogador, como jogos de peças, Sudoku, palavras cruzadas, etc. Os algoritmos de pesquisa ajudam a pesquisar uma posição específica nesses jogos.
Problemas de Pathfinding de Agente Único
Os jogos, como os quebra-cabeças 3X3 de oito peças, 4X4 de quinze peças e 5X5 de vinte e quatro peças, são desafios para encontrar caminhos de um único agente. Eles consistem em uma matriz de ladrilhos com um ladrilho em branco. O jogador deve organizar as peças deslizando uma peça vertical ou horizontalmente em um espaço em branco com o objetivo de realizar algum objetivo.
Os outros exemplos de problemas de pathfinding de agente único são o Problema do Caixeiro Viajante, o Cubo de Rubik e a Prova de Teorema.
Terminologia de Pesquisa
Problem Space- É o ambiente em que ocorre a pesquisa. (Um conjunto de estados e um conjunto de operadores para alterar esses estados)
Problem Instance - É o estado inicial + estado da meta.
Problem Space Graph- Representa um estado de problema. Os estados são mostrados por nós e os operadores são mostrados por arestas.
Depth of a problem - Comprimento do caminho mais curto ou da sequência mais curta de operadores do estado inicial ao estado de objetivo.
Space Complexity - O número máximo de nós armazenados na memória.
Time Complexity - O número máximo de nós que são criados.
Admissibility - Uma propriedade de um algoritmo para sempre encontrar uma solução ótima.
Branching Factor - O número médio de nós filhos no gráfico do espaço do problema.
Depth - Comprimento do caminho mais curto do estado inicial ao estado de objetivo.
Estratégias de busca de força bruta
Eles são muito simples, pois não precisam de nenhum conhecimento específico do domínio. Eles funcionam bem com um pequeno número de estados possíveis.
Requisitos -
- Descrição do estado
- Um conjunto de operadores válidos
- Estado inicial
- Descrição do estado da meta
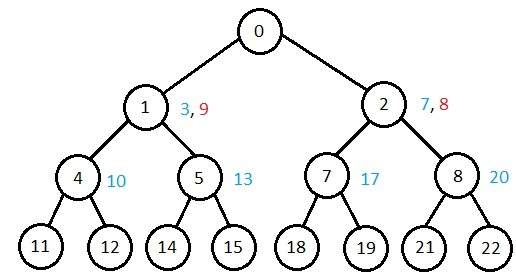
Pesquisa em amplitude
Ele começa no nó raiz, explora os nós vizinhos primeiro e avança para os vizinhos de nível seguinte. Ele gera uma árvore por vez até que a solução seja encontrada. Ele pode ser implementado usando a estrutura de dados da fila FIFO. Este método fornece o caminho mais curto para a solução.
E se branching factor(número médio de nós filhos para um determinado nó) = be profundidade = d, então o número de nós no nível d = b d .
O número total de nós criados no pior caso é b + b 2 + b 3 +… + b d .
Disadvantage- Como cada nível de nós é salvo para a criação do próximo, ele consome muito espaço de memória. A necessidade de espaço para armazenar nós é exponencial.
Sua complexidade depende do número de nós. Ele pode verificar nós duplicados.

Pesquisa em profundidade
É implementado em recursão com estrutura de dados de pilha LIFO. Ele cria o mesmo conjunto de nós que o método Largura-Primeiro, apenas na ordem diferente.
Como os nós no caminho único são armazenados em cada iteração da raiz ao nó folha, o requisito de espaço para armazenar os nós é linear. Com o fator de ramificação be a profundidade m , o espaço de armazenamento é bm.
Disadvantage- Este algoritmo não pode terminar e continuar infinitamente em um caminho. A solução para esse problema é escolher uma profundidade de corte. Se o corte ideal for d , e se o corte escolhido for menor que d , então este algoritmo pode falhar. Se o corte escolhido for maior que d , o tempo de execução aumentará.
Sua complexidade depende do número de caminhos. Ele não pode verificar nós duplicados.

Pesquisa bidirecional
Ele pesquisa para a frente a partir do estado inicial e para trás do estado de objetivo até que ambos se encontrem para identificar um estado comum.
O caminho do estado inicial é concatenado com o caminho inverso do estado objetivo. Cada pesquisa é feita apenas até a metade do caminho total.
Pesquisa de custo uniforme
A classificação é feita no aumento do custo do caminho para um nó. Ele sempre expande o nó de menor custo. É idêntico à pesquisa de amplitude inicial se cada transição tiver o mesmo custo.
Explora caminhos em ordem crescente de custo.
Disadvantage- Pode haver vários caminhos longos com custo ≤ C *. A pesquisa de custo uniforme deve explorar todos eles.
Profundidade Iterativa de Aprofundamento - Primeira Pesquisa
Ele executa a pesquisa em profundidade até o nível 1, começa de novo, executa uma pesquisa completa em profundidade no nível 2 e continua dessa forma até que a solução seja encontrada.
Ele nunca cria um nó até que todos os nós inferiores sejam gerados. Ele apenas salva uma pilha de nós. O algoritmo termina quando encontra uma solução na profundidade d . O número de nós criados na profundidade d é b d e na profundidade d-1 é b d-1.
Comparação de várias complexidades de algoritmos
Vamos ver o desempenho dos algoritmos com base em vários critérios -
| Critério | Largura primeiro | Profundidade primeiro | Bidirecional | Custo Uniforme | Aprofundamento interativo |
|---|---|---|---|---|---|
| Tempo | b d | b m | b d / 2 | b d | b d |
| Espaço | b d | b m | b d / 2 | b d | b d |
| Optimality | sim | Não | sim | sim | sim |
| Integridade | sim | Não | sim | sim | sim |
Estratégias de pesquisa informadas (heurísticas)
Para resolver grandes problemas com grande número de estados possíveis, o conhecimento específico do problema precisa ser adicionado para aumentar a eficiência dos algoritmos de pesquisa.
Funções de avaliação heurística
Eles calculam o custo do caminho ideal entre dois estados. Uma função heurística para jogos de peças deslizantes é calculada contando o número de movimentos que cada peça faz a partir de seu estado de objetivo e adicionando esse número de movimentos para todas as peças.
Pesquisa Heurística Pura
Ele expande os nós na ordem de seus valores heurísticos. Ele cria duas listas, uma lista fechada para os nós já expandidos e uma lista aberta para os nós criados, mas não expandidos.
Em cada iteração, um nó com um valor heurístico mínimo é expandido, todos os seus nós filhos são criados e colocados na lista fechada. Em seguida, a função heurística é aplicada aos nós filhos e eles são colocados na lista aberta de acordo com seu valor heurístico. Os caminhos mais curtos são salvos e os mais longos são descartados.
Uma pesquisa
É a forma mais conhecida de melhor pesquisa inicial. Ele evita expandir caminhos que já são caros, mas expande os caminhos mais promissores primeiro.
f (n) = g (n) + h (n), onde
- g (n) o custo (até agora) para chegar ao nó
- h (n) custo estimado para ir do nó ao objetivo
- f (n) custo total estimado do caminho de n até a meta. Ele é implementado usando a fila de prioridade aumentando f (n).
Greedy Best First Search
Ele expande o nó que se estima estar mais próximo do objetivo. Ele expande os nós com base em f (n) = h (n). Ele é implementado usando a fila de prioridade.
Disadvantage- Pode ficar preso em loops. Não é o ideal.
Algoritmos de pesquisa local
Eles começam com uma solução prospectiva e, em seguida, passam para uma solução vizinha. Eles podem retornar uma solução válida mesmo se ela for interrompida a qualquer momento antes de terminar.
Pesquisa de escalada
É um algoritmo iterativo que começa com uma solução arbitrária para um problema e tenta encontrar uma solução melhor alterando um único elemento da solução de forma incremental. Se a mudança produzir uma solução melhor, uma mudança incremental será considerada uma nova solução. Este processo é repetido até que não haja mais melhorias.
função Hill-Climbing (problema), retorna um estado que é um máximo local.
inputs: problem, a problem
local variables: current, a node
neighbor, a node
current <-Make_Node(Initial-State[problem])
loop
do neighbor <- a highest_valued successor of current
if Value[neighbor] ≤ Value[current] then
return State[current]
current <- neighbor
endDisadvantage - Este algoritmo não é completo nem ideal.
Pesquisa de feixe local
Nesse algoritmo, ele contém k número de estados a qualquer momento. No início, esses estados são gerados aleatoriamente. Os sucessores desses k estados são calculados com a ajuda da função objetivo. Se algum desses sucessores for o valor máximo da função objetivo, o algoritmo para.
Caso contrário, os (k estados iniciais ek número de sucessores dos estados = 2k) estados são colocados em um pool. O pool é então classificado numericamente. Os k estados mais altos são selecionados como novos estados iniciais. Este processo continua até que um valor máximo seja alcançado.
a função BeamSearch ( problema, k ), retorna um estado de solução.
start with k randomly generated states
loop
generate all successors of all k states
if any of the states = solution, then return the state
else select the k best successors
endRecozimento simulado
Recozimento é o processo de aquecimento e resfriamento de um metal para alterar sua estrutura interna para modificar suas propriedades físicas. Quando o metal esfria, sua nova estrutura é apreendida e o metal retém suas propriedades recém-obtidas. No processo de recozimento simulado, a temperatura é mantida variável.
Inicialmente, definimos a temperatura alta e depois permitimos que ela 'esfrie' lentamente conforme o algoritmo prossegue. Quando a temperatura está alta, o algoritmo pode aceitar soluções piores com alta frequência.
Começar
- Inicializar k = 0; L = número inteiro de variáveis;
- De i → j, pesquise a diferença de desempenho Δ.
- Se Δ <= 0 então aceite else if exp (-Δ / T (k))> random (0,1) então aceite;
- Repita as etapas 1 e 2 para as etapas L (k).
- k = k + 1;
Repita as etapas 1 a 4 até que os critérios sejam atendidos.
Fim
Problema do caixeiro viajante
Nesse algoritmo, o objetivo é encontrar um passeio de baixo custo que começa em uma cidade, visita todas as cidades no trajeto exatamente uma vez e termina na mesma cidade inicial.
Start
Find out all (n -1)! Possible solutions, where n is the total number of cities.
Determine the minimum cost by finding out the cost of each of these (n -1)! solutions.
Finally, keep the one with the minimum cost.
end
Os Sistemas Lógicos Fuzzy (FLS) produzem uma saída aceitável, mas definida, em resposta a uma entrada incompleta, ambígua, distorcida ou imprecisa (fuzzy).
O que é Fuzzy Logic?
Fuzzy Logic (FL) é um método de raciocínio que se assemelha ao raciocínio humano. A abordagem da FL imita a forma de tomada de decisão em humanos que envolve todas as possibilidades intermediárias entre os valores digitais SIM e NÃO.
O bloco lógico convencional que um computador pode entender recebe uma entrada precisa e produz uma saída definida como VERDADEIRO ou FALSO, que é equivalente ao SIM ou NÃO humano.
O inventor da lógica fuzzy, Lotfi Zadeh, observou que, ao contrário dos computadores, a tomada de decisão humana inclui uma gama de possibilidades entre SIM e NÃO, tais como -
| CERTAMENTE SIM |
| POSSIVELMENTE SIM |
| NÃO POSSO DIZER |
| POSSIVELMENTE NÃO |
| CERTAMENTE NÃO |
A lógica fuzzy atua nos níveis de possibilidades de entrada para atingir a saída definida.
Implementação
Ele pode ser implementado em sistemas com vários tamanhos e recursos, desde pequenos microcontroladores até grandes sistemas de controle em rede e baseados em estações de trabalho.
Ele pode ser implementado em hardware, software ou uma combinação de ambos.
Por que Fuzzy Logic?
A lógica difusa é útil para fins comerciais e práticos.
- Pode controlar máquinas e produtos de consumo.
- Pode não fornecer um raciocínio preciso, mas um raciocínio aceitável.
- A lógica fuzzy ajuda a lidar com a incerteza na engenharia.
Arquitetura de sistemas de lógica difusa
Tem quatro partes principais, conforme mostrado -
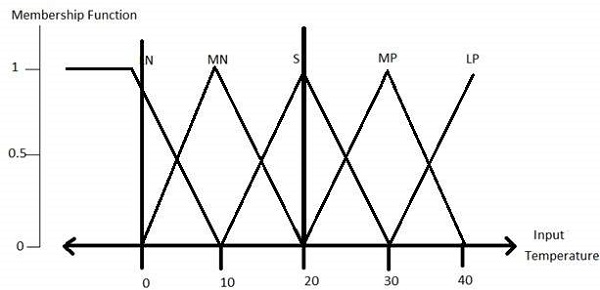
Fuzzification Module- Transforma as entradas do sistema, que são números nítidos, em conjuntos fuzzy. Ele divide o sinal de entrada em cinco etapas, como -
| LP | x é grande positivo |
| MP | x é médio positivo |
| S | x é pequeno |
| MN | x é médio negativo |
| LN | x é grande negativo |
Knowledge Base - Ele armazena regras IF-THEN fornecidas por especialistas.
Inference Engine - Simula o processo de raciocínio humano fazendo inferência difusa sobre as entradas e regras IF-THEN.
Defuzzification Module - Transforma o conjunto fuzzy obtido pelo mecanismo de inferência em um valor crisp.

o membership functions work on conjuntos difusos de variáveis.
Função de membro
As funções de associação permitem quantificar o termo linguístico e representar um conjunto difuso graficamente. UMAmembership functionpara um conjunto fuzzy A no universo do discurso X é definido como μ A : X → [0,1].
Aqui, cada elemento de X é mapeado para um valor entre 0 e 1. Ele é chamadomembership value ou degree of membership. Ele quantifica o grau de pertinência do elemento no X ao conjunto fuzzy A .
- O eixo x representa o universo do discurso.
- O eixo y representa os graus de pertinência no intervalo [0, 1].
Pode haver várias funções de pertinência aplicáveis para difundir um valor numérico. As funções de associação simples são usadas, pois o uso de funções complexas não adiciona mais precisão à saída.
Todas as funções de associação para LP, MP, S, MN, e LN são mostrados como abaixo -

As formas de função de pertinência triangular são mais comuns entre várias outras formas de função de pertinência, como trapezoidal, singleton e gaussiana.
Aqui, a entrada para o difusificador de 5 níveis varia de -10 volts a +10 volts. Portanto, a saída correspondente também muda.
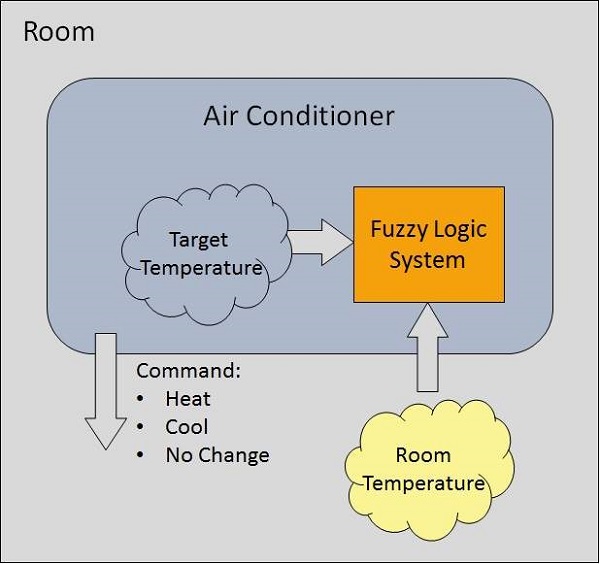
Exemplo de um sistema de lógica difusa
Vamos considerar um sistema de ar condicionado com sistema de lógica difusa de 5 níveis. Este sistema ajusta a temperatura do ar condicionado comparando a temperatura ambiente e o valor de temperatura alvo.
Algoritmo
- Definir variáveis e termos linguísticos (início)
- Construa funções de associação para eles. (começar)
- Construir base de conhecimento de regras (iniciar)
- Converta dados nítidos em conjuntos de dados difusos usando funções de associação. (fuzzificação)
- Avalie as regras na base de regras. (Motor de inferência)
- Combine os resultados de cada regra. (Motor de inferência)
- Converta os dados de saída em valores não difusos. (defuzificação)
Desenvolvimento
Step 1 − Define linguistic variables and terms
As variáveis linguísticas são variáveis de entrada e saída na forma de palavras ou frases simples. Para temperatura ambiente, frio, quente, quente, etc., são termos linguísticos.
Temperatura (t) = {muito frio, frio, quente, muito quente, quente}
Cada membro deste conjunto é um termo linguístico e pode abranger alguma parte dos valores gerais de temperatura.
Step 2 − Construct membership functions for them
As funções de associação da variável de temperatura são mostradas -
Step3 − Construct knowledge base rules
Crie uma matriz de valores de temperatura ambiente versus valores de temperatura alvo que um sistema de ar condicionado deve fornecer.
| Temperatura ambiente. /Alvo | Muito frio | Frio | Caloroso | Quente | Muito quente |
|---|---|---|---|---|---|
| Muito frio | No_Change | Calor | Calor | Calor | Calor |
| Frio | Legal | No_Change | Calor | Calor | Calor |
| Caloroso | Legal | Legal | No_Change | Calor | Calor |
| Quente | Legal | Legal | Legal | No_Change | Calor |
| Muito quente | Legal | Legal | Legal | Legal | No_Change |
Crie um conjunto de regras na base de conhecimento na forma de estruturas IF-THEN-ELSE.
| Sr. Não. | Doença | Açao |
|---|---|---|
| 1 | SE temperatura = (Frio OU Muito_frio) E alvo = Quente ENTÃO | Calor |
| 2 | SE temperatura = (Quente OU Muito_quente) E alvo = Quente ENTÃO | Legal |
| 3 | SE (temperatura = quente) E (alvo = quente) ENTÃO | No_Change |
Step 4 − Obtain fuzzy value
As operações de conjunto difuso executam a avaliação das regras. As operações usadas para OR e AND são Max e Min, respectivamente. Combine todos os resultados da avaliação para formar um resultado final. Este resultado é um valor difuso.
Step 5 − Perform defuzzification
A defuzzificação é então realizada de acordo com a função de pertinência para a variável de saída.

Áreas de Aplicação da Lógica Fuzzy
As principais áreas de aplicação da lógica fuzzy são as fornecidas -
Automotive Systems
- Caixas de câmbio automáticas
- Direção nas quatro rodas
- Controle do ambiente do veículo
Consumer Electronic Goods
- Sistemas Hi-Fi
- Photocopiers
- Câmeras fotográficas e de vídeo
- Television
Domestic Goods
- Fornos de microondas
- Refrigerators
- Toasters
- Aspirador de pó
- Máquinas de lavar roupas
Environment Control
- Condicionadores de ar / secadores / aquecedores
- Humidifiers
Vantagens dos FLSs
Os conceitos matemáticos dentro do raciocínio nebuloso são muito simples.
Você pode modificar um FLS apenas adicionando ou excluindo regras devido à flexibilidade da lógica fuzzy.
Os sistemas de lógica difusa podem receber informações de entrada imprecisas, distorcidas e com ruído.
FLSs são fáceis de construir e entender.
A lógica difusa é uma solução para problemas complexos em todos os campos da vida, incluindo a medicina, pois se assemelha ao raciocínio humano e à tomada de decisões.
Desvantagens dos FLSs
- Não existe uma abordagem sistemática para o projeto de sistemas fuzzy.
- Eles são compreensíveis apenas quando simples.
- Eles são adequados para os problemas que não requerem alta precisão.
O Processamento de Linguagem Natural (PNL) se refere ao método de IA de comunicação com sistemas inteligentes usando uma linguagem natural como o inglês.
O processamento de linguagem natural é necessário quando você deseja que um sistema inteligente como o robô execute de acordo com suas instruções, quando você deseja ouvir a decisão de um sistema especialista clínico baseado em diálogo, etc.
O campo da PNL envolve fazer computadores para realizar tarefas úteis com as linguagens naturais que os humanos usam. A entrada e saída de um sistema PNL pode ser -
- Speech
- Texto Escrito
Componentes da PNL
Existem dois componentes da PNL -
Compreensão da linguagem natural (NLU)
A compreensão envolve as seguintes tarefas -
- Mapear a entrada fornecida em linguagem natural em representações úteis.
- Analisando diferentes aspectos da linguagem.
Geração de linguagem natural (NLG)
É o processo de produção de frases e sentenças significativas na forma de linguagem natural a partir de alguma representação interna.
Envolve -
Text planning - Inclui a recuperação do conteúdo relevante da base de conhecimento.
Sentence planning - Inclui a escolha das palavras necessárias, a formação de frases significativas, a definição do tom da frase.
Text Realization - Está mapeando o plano da frase na estrutura da frase.
O NLU é mais difícil do que o NLG.
Dificuldades em NLU
NL tem uma forma e estrutura extremamente ricas.
É muito ambíguo. Pode haver diferentes níveis de ambigüidade -
Lexical ambiguity - Está em um nível muito primitivo, como o nível das palavras.
Por exemplo, tratar a palavra “tabuleiro” como substantivo ou verbo?
Syntax Level ambiguity - Uma frase pode ser analisada de diferentes maneiras.
Por exemplo, “Ele levantou o besouro com a tampa vermelha”. - Ele usou boné para levantar o besouro ou levantou um besouro que tinha boné vermelho?
Referential ambiguity- Referindo-se a algo usando pronomes. Por exemplo, Rima foi para Gauri. Ela disse: “Estou cansada”. - Exatamente quem está cansado?
Uma entrada pode ter significados diferentes.
Muitas entradas podem significar a mesma coisa.
Terminologia de PNL
Phonology - É um estudo de organização de som sistematicamente.
Morphology - É um estudo de construção de palavras a partir de unidades de sentido primitivas.
Morpheme - É a unidade primitiva de significado em uma linguagem.
Syntax- Refere-se a organizar palavras para formar uma frase. Também envolve determinar o papel estrutural das palavras na frase e nas frases.
Semantics - Preocupa-se com o significado das palavras e como combiná-las em frases e sentenças significativas.
Pragmatics - Lida com o uso e compreensão de frases em diferentes situações e como a interpretação da frase é afetada.
Discourse - Trata de como a frase imediatamente anterior pode afetar a interpretação da próxima frase.
World Knowledge - Inclui o conhecimento geral sobre o mundo.
Etapas em PNL
Existem cinco etapas gerais -
Lexical Analysis- Envolve identificar e analisar a estrutura das palavras. Léxico de um idioma significa a coleção de palavras e frases em um idioma. A análise lexical está dividindo todo o pedaço de txt em parágrafos, sentenças e palavras.
Syntactic Analysis (Parsing)- Envolve a análise das palavras da frase quanto à gramática e a organização das palavras de maneira a mostrar a relação entre as palavras. A frase como “A escola vai para o menino” é rejeitada pelo analisador sintático inglês.

Semantic Analysis- Retira o significado exato ou o significado do dicionário do texto. O texto é verificado quanto ao significado. Isso é feito mapeando estruturas sintáticas e objetos no domínio da tarefa. O analisador semântico desconsidera frases como “sorvete quente”.
Discourse Integration- O significado de qualquer frase depende do significado da frase imediatamente anterior. Além disso, também traz o significado de frase imediatamente posterior.
Pragmatic Analysis- Durante isso, o que foi dito é reinterpretado sobre o que realmente significava. Envolve derivar aqueles aspectos da linguagem que requerem conhecimento do mundo real.
Aspectos de implementação da análise sintática
Há uma série de algoritmos que os pesquisadores desenvolveram para a análise sintática, mas consideramos apenas os seguintes métodos simples -
- Gramática Livre de Contexto
- Analisador de cima para baixo
Deixe-nos ver em detalhes -
Gramática Livre de Contexto
É a gramática que consiste em regras com um único símbolo no lado esquerdo das regras de reescrita. Vamos criar uma gramática para analisar uma frase -
“O pássaro bica os grãos”
Articles (DET)- a | an | a
Nouns- pássaro | pássaros | grão | grãos
Noun Phrase (NP)- Artigo + Substantivo | Artigo + Adjetivo + Substantivo
= DET N | DET ADJ N
Verbs- bicadas | bicadas | bicado
Verb Phrase (VP)- NP V | V NP
Adjectives (ADJ)- lindo | pequeno | chilrear
A árvore de análise divide a frase em partes estruturadas para que o computador possa compreender e processar facilmente. Para que o algoritmo de análise construa esta árvore de análise, um conjunto de regras de reescrita, que descreve quais estruturas de árvore são legais, precisa ser construído.
Essas regras dizem que um determinado símbolo pode ser expandido na árvore por uma sequência de outros símbolos. De acordo com a regra de lógica de primeira ordem, se houver duas cadeias de caracteres Noun Phrase (NP) e Verb Phrase (VP), então a cadeia combinada por NP seguida por VP é uma sentença. As regras de reescrita para a frase são as seguintes -
S → NP VP
NP → DET N | DET ADJ N
VP → V NP
Lexocon −
DET → a | a
ADJ → linda | empoleirar-se
N → pássaro | pássaros | grão | grãos
V → picar | beijos | bicadas
A árvore de análise pode ser criada como mostrado -

Agora considere as regras de reescrita acima. Uma vez que V pode ser substituído por ambos, "peck" ou "pecks", frases como "O pássaro bica os grãos" podem ser erroneamente permitidas. ou seja, o erro de concordância sujeito-verbo é aprovado como correto.
Merit - O estilo mais simples de gramática, portanto amplamente utilizado.
Demerits −
Eles não são altamente precisos. Por exemplo, “Os grãos bicam o pássaro”, é sintaticamente correto de acordo com o analisador, mas mesmo que não faça sentido, o analisador o considera uma frase correta.
Para obter alta precisão, vários conjuntos de gramática precisam ser preparados. Pode exigir um conjunto de regras completamente diferente para analisar variações singulares e plurais, sentenças passivas, etc., o que pode levar à criação de um conjunto enorme de regras que são incontroláveis.
Analisador de cima para baixo
Aqui, o analisador começa com o símbolo S e tenta reescrevê-lo em uma sequência de símbolos terminais que correspondem às classes das palavras na frase de entrada até que consista inteiramente de símbolos terminais.
Estes são então verificados com a frase de entrada para ver se combinou. Caso contrário, o processo é reiniciado com um conjunto diferente de regras. Isso é repetido até que uma regra específica que descreva a estrutura da frase seja encontrada.
Merit - É simples de implementar.
Demerits −
- É ineficiente, pois o processo de pesquisa deve ser repetido se ocorrer um erro.
- Velocidade lenta de trabalho.
Sistemas especialistas (ES) são um dos domínios de pesquisa proeminentes da IA. É apresentado pelos pesquisadores da Universidade de Stanford, Departamento de Ciência da Computação.
O que são sistemas especialistas?
Os sistemas especialistas são os aplicativos de computador desenvolvidos para resolver problemas complexos em um domínio particular, no nível da inteligência e perícia humana extraordinária.
Características dos sistemas especialistas
- Alta performance
- Understandable
- Reliable
- Altamente responsivo
Capacidades de sistemas especialistas
Os sistemas especialistas são capazes de -
- Advising
- Instruir e auxiliar humanos na tomada de decisões
- Demonstrating
- Derivando uma solução
- Diagnosing
- Explaining
- Interpretando entrada
- Previsão de resultados
- Justificando a conclusão
- Sugerir opções alternativas para um problema
Eles são incapazes de -
- Substituindo tomadores de decisão humanos
- Possuindo capacidades humanas
- Produzindo resultados precisos para uma base de conhecimento inadequada
- Refinando seu próprio conhecimento
Componentes de sistemas especialistas
Os componentes do ES incluem -
- Base de Conhecimento
- Motor de inferência
- Interface de usuário
Vamos vê-los um por um brevemente -

Base de Conhecimento
Ele contém conhecimento específico do domínio e de alta qualidade.
O conhecimento é necessário para exibir inteligência. O sucesso de qualquer ES depende principalmente da coleta de conhecimento altamente preciso e preciso.
O que é conhecimento?
Os dados são uma coleção de fatos. As informações são organizadas como dados e fatos sobre o domínio da tarefa.Data, information, e past experience combinados são denominados como conhecimento.
Componentes da Base de Conhecimento
A base de conhecimento de um ES é um repositório de conhecimento factual e heurístico.
Factual Knowledge - É a informação amplamente aceita pelos Engenheiros do Conhecimento e estudiosos no domínio da tarefa.
Heuristic Knowledge - É uma questão de prática, julgamento preciso, capacidade de avaliação e adivinhação.
Representação do conhecimento
É o método utilizado para organizar e formalizar o conhecimento na base de conhecimento. É na forma de regras IF-THEN-ELSE.
Aquisição de conhecimento
O sucesso de qualquer sistema especialista depende principalmente da qualidade, integridade e precisão das informações armazenadas na base de conhecimento.
A base de conhecimento é formada por leituras de vários especialistas, estudiosos e os Knowledge Engineers. O engenheiro do conhecimento é uma pessoa com qualidades de empatia, aprendizado rápido e habilidades de análise de caso.
Ele adquire informações do especialista no assunto gravando, entrevistando e observando-o no trabalho, etc. Ele então categoriza e organiza as informações de forma significativa, na forma de regras IF-THEN-ELSE, para serem usadas pela máquina de interferência. O engenheiro do conhecimento também acompanha o desenvolvimento do ES.
Motor de inferência
O uso de procedimentos e regras eficientes pelo Inference Engine é essencial para se deduzir uma solução correta e sem falhas.
No caso do ES baseado em conhecimento, o Inference Engine adquire e manipula o conhecimento da base de conhecimento para chegar a uma solução específica.
No caso de ES baseado em regras, ele -
Aplica regras repetidamente aos fatos, que são obtidos da aplicação de regra anterior.
Adiciona novo conhecimento à base de conhecimento, se necessário.
Resolve o conflito de regras quando várias regras são aplicáveis a um caso específico.
Para recomendar uma solução, o Inference Engine usa as seguintes estratégias -
- Encadeamento para frente
- Encadeamento para trás
Encadeamento para frente
É uma estratégia de um sistema especialista para responder à pergunta, “What can happen next?”
Aqui, a máquina de inferência segue a cadeia de condições e derivações e finalmente deduz o resultado. Ele considera todos os fatos e regras e os classifica antes de chegar a uma solução.
Essa estratégia é seguida para trabalhar na conclusão, resultado ou efeito. Por exemplo, a previsão do status do mercado de ações como um efeito das mudanças nas taxas de juros.

Encadeamento para trás
Com esta estratégia, um sistema especialista descobre a resposta para a pergunta, “Why this happened?”
Com base no que já aconteceu, a máquina de inferência tenta descobrir quais condições poderiam ter acontecido no passado para esse resultado. Essa estratégia é seguida para descobrir a causa ou razão. Por exemplo, diagnóstico de câncer no sangue em humanos.
Interface de usuário
A interface do usuário fornece interação entre o usuário do ES e o próprio ES. Geralmente é o Processamento de Linguagem Natural para ser usado pelo usuário que é bem versado no domínio da tarefa. O usuário do ES não precisa ser necessariamente um especialista em Inteligência Artificial.
Explica como o ES chegou a uma recomendação específica. A explicação pode aparecer nas seguintes formas -
- Linguagem natural exibida na tela.
- Narrações verbais em linguagem natural.
- Lista de números de regra exibidos na tela.
A interface do usuário facilita o rastreamento da credibilidade das deduções.
Requisitos da interface de usuário Efficient ES
Deve ajudar os usuários a atingir seus objetivos da maneira mais curta possível.
Deve ser projetado para funcionar de acordo com as práticas de trabalho existentes ou desejadas do usuário.
Sua tecnologia deve ser adaptável aos requisitos do usuário; Não o contrário.
Deve fazer uso eficiente da entrada do usuário.
Limitações de sistemas especialistas
Nenhuma tecnologia pode oferecer uma solução fácil e completa. Grandes sistemas são caros, requerem um tempo significativo de desenvolvimento e recursos de computador. ESs têm suas limitações que incluem -
- Limitações da tecnologia
- Aquisição de conhecimento difícil
- ES são difíceis de manter
- Altos custos de desenvolvimento
Aplicações do sistema especialista
A tabela a seguir mostra onde o ES pode ser aplicado.
| Inscrição | Descrição |
|---|---|
| Domínio de Design | Design de lentes de câmera, design de automóveis. |
| Domínio Médico | Sistemas de diagnóstico para deduzir a causa da doença a partir de dados observados, realização de operações médicas em humanos. |
| Sistemas de Monitoramento | Comparar dados continuamente com o sistema observado ou com o comportamento prescrito, como monitoramento de vazamento em um longo oleoduto. |
| Sistemas de controle de processo | Controlar um processo físico com base no monitoramento. |
| Domínio de Conhecimento | Descobrindo falhas em veículos, computadores. |
| Finanças / Comércio | Detecção de possíveis fraudes, transações suspeitas, negociação em bolsa, agendamento de companhias aéreas, agendamento de carga. |
Tecnologia de Sistema Especializada
Existem vários níveis de tecnologias ES disponíveis. As tecnologias de sistemas especialistas incluem -
Expert System Development Environment- O ambiente de desenvolvimento ES inclui hardware e ferramentas. Eles são -
Estações de trabalho, minicomputadores, mainframes.
Linguagens de programação simbólica de alto nível, como LISt Pprogramação (LISP) e PROgramática en LOGique (PROLOG).
Grandes bancos de dados.
Tools - Eles reduzem o esforço e os custos envolvidos no desenvolvimento de um sistema especialista em grande medida.
Editores poderosos e ferramentas de depuração com várias janelas.
Eles fornecem prototipagem rápida
Tenha definições embutidas de modelo, representação de conhecimento e design de inferência.
Shells- Um shell nada mais é que um sistema especialista sem base de conhecimento. Um shell fornece aos desenvolvedores aquisição de conhecimento, mecanismo de inferência, interface de usuário e facilidade de explicação. Por exemplo, alguns shells são fornecidos abaixo -
Java Expert System Shell (JESS) que fornece uma API Java totalmente desenvolvida para a criação de um sistema especialista.
Vidwan , um shell desenvolvido no National Center for Software Technology, Mumbai em 1993. Ele permite a codificação do conhecimento na forma de regras IF-THEN.
Desenvolvimento de sistemas especialistas: etapas gerais
O processo de desenvolvimento ES é iterativo. As etapas no desenvolvimento do ES incluem -
Identificar o domínio do problema
- O problema deve ser adequado a um sistema especialista para resolvê-lo.
- Encontre os especialistas no domínio da tarefa para o projeto ES.
- Estabeleça a relação custo-benefício do sistema.
Projete o sistema
Identifique a Tecnologia ES
Conhecer e estabelecer o grau de integração com os demais sistemas e bases de dados.
Perceba como os conceitos podem representar melhor o conhecimento do domínio.
Desenvolva o Protótipo
Da Base de Conhecimento: O engenheiro de conhecimento trabalha para -
- Adquira conhecimento de domínio do especialista.
- Representá-lo na forma de regras If-THEN-ELSE.
Teste e refine o protótipo
O engenheiro de conhecimento usa casos de amostra para testar o protótipo quanto a quaisquer deficiências de desempenho.
Os usuários finais testam os protótipos do ES.
Desenvolva e complete o ES
Teste e garanta a interação do ES com todos os elementos de seu ambiente, incluindo usuários finais, bancos de dados e outros sistemas de informação.
Documente bem o projeto ES.
Treine o usuário para usar o ES.
Manter o sistema
Mantenha a base de conhecimento atualizada por meio de revisões e atualizações regulares.
Forneça novas interfaces com outros sistemas de informação, conforme esses sistemas evoluem.
Benefícios dos sistemas especialistas
Availability - Eles estão facilmente disponíveis devido à produção em massa de software.
Less Production Cost- O custo de produção é razoável. Isso os torna acessíveis.
Speed- Eles oferecem grande velocidade. Eles reduzem a quantidade de trabalho que um indivíduo coloca.
Less Error Rate - A taxa de erros é baixa em comparação com os erros humanos.
Reducing Risk - Eles podem trabalhar em ambientes perigosos para os seres humanos.
Steady response - Eles trabalham de forma constante, sem ficarem móveis, tensos ou cansados.
A robótica é um domínio da inteligência artificial que trata do estudo da criação de robôs inteligentes e eficientes.
O que são robôs?
Os robôs são os agentes artificiais que atuam no ambiente do mundo real.
Objetivo
Os robôs têm como objetivo manipular os objetos percebendo, escolhendo, movendo, modificando as propriedades físicas do objeto, destruindo-o ou para ter um efeito, libertando assim a força de trabalho de realizar funções repetitivas sem ficar entediado, distraído ou exausto.
O que é robótica?
A Robótica é um ramo da IA, que é composta por Engenharia Elétrica, Engenharia Mecânica e Ciência da Computação para o projeto, construção e aplicação de robôs.
Aspectos da Robótica
Os robôs têm mechanical construction, forma ou forma projetada para realizar uma tarefa específica.
Eles têm electrical components que alimentam e controlam as máquinas.
Eles contêm algum nível de computer program que determina o que, quando e como um robô faz algo.
Diferença no sistema de robô e outro programa de IA
Aqui está a diferença entre os dois -
| Programas AI | Robôs |
|---|---|
| Eles geralmente operam em mundos estimulados por computador. | Eles operam no mundo físico real |
| A entrada para um programa AI é em símbolos e regras. | As entradas para robôs são sinais analógicos na forma de ondas de voz ou imagens |
| Eles precisam de computadores de uso geral para operar. | Eles precisam de hardware especial com sensores e efetores. |
Locomoção do robô
Locomoção é o mecanismo que torna um robô capaz de se mover em seu ambiente. Existem vários tipos de locomotivas -
- Legged
- Wheeled
- Combinação de locomoção com pernas e rodas
- Deslizamento / derrapagem rastreados
Locomoção com pernas
Este tipo de locomoção consome mais energia enquanto demonstra andar, pular, trotar, pular, subir ou descer, etc.
Requer mais número de motores para realizar um movimento. É adequado tanto para terrenos acidentados como suaves, onde a superfície irregular ou muito lisa faz com que consuma mais energia para uma locomoção com rodas. É um pouco difícil de implementar devido a problemas de estabilidade.
Ele vem com a variedade de uma, duas, quatro e seis pernas. Se um robô tem várias pernas, a coordenação das pernas é necessária para a locomoção.
O número total de possíveis gaits (uma sequência periódica de eventos de levantamento e liberação para cada uma das pernas) que um robô pode viajar depende do número de suas pernas.
Se um robô tem k pernas, então o número de eventos possíveis N = (2k-1) !.
No caso de um robô de duas pernas (k = 2), o número de eventos possíveis é N = (2k-1)! = (2 * 2-1)! = 3! = 6.
Portanto, existem seis eventos diferentes possíveis -
- Levantando a perna esquerda
- Liberando a perna esquerda
- Levantando a perna direita
- Liberando a perna direita
- Levantando as duas pernas juntas
- Liberando ambas as pernas juntas
No caso de k = 6 pernas, existem 39916800 eventos possíveis. Portanto, a complexidade dos robôs é diretamente proporcional ao número de pernas.

Locomoção com rodas
Requer menos número de motores para realizar um movimento. É um pouco fácil de implementar, pois há menos problemas de estabilidade no caso de maior número de rodas. É energeticamente eficiente em comparação com a locomoção com pernas.
Standard wheel - Gira em torno do eixo da roda e em torno do contato
Castor wheel - Gira em torno do eixo da roda e da junta de direção deslocada.
Swedish 45o and Swedish 90o wheels - Omni-roda, gira em torno do ponto de contato, em torno do eixo da roda e em torno dos rolos.
Ball or spherical wheel - Roda omnidirecional, tecnicamente difícil de implementar.

Locomoção deslizante / derrapante
Nessa modalidade, os veículos utilizam esteiras como em um tanque. O robô é dirigido movendo as esteiras com velocidades diferentes na mesma direção ou na direção oposta. Ele oferece estabilidade devido à grande área de contato da pista e do solo.

Componentes de um robô
Os robôs são construídos com o seguinte -
Power Supply - Os robôs são movidos por baterias, energia solar, fontes de energia hidráulica ou pneumática.
Actuators - Eles convertem energia em movimento.
Electric motors (AC/DC) - Eles são necessários para o movimento rotacional.
Pneumatic Air Muscles - Contraem quase 40% quando o ar é aspirado.
Muscle Wires - Contraem 5% quando a corrente elétrica passa por eles.
Piezo Motors and Ultrasonic Motors - Ideal para robôs industriais.
Sensors- Eles fornecem conhecimento de informações em tempo real sobre o ambiente de tarefas. Os robôs são equipados com sensores de visão para calcular a profundidade do ambiente. Um sensor tátil imita as propriedades mecânicas dos receptores de toque das pontas dos dedos humanos.
Visão Computacional
Esta é uma tecnologia de IA com a qual os robôs podem ver. A visão computacional desempenha um papel vital nos domínios da proteção, segurança, saúde, acesso e entretenimento.
A visão computacional extrai, analisa e compreende automaticamente informações úteis de uma única imagem ou de uma série de imagens. Este processo envolve o desenvolvimento de algoritmos para realizar a compreensão visual automática.
Hardware do sistema de visão computacional
Isso envolve -
- Fonte de energia
- Dispositivo de aquisição de imagem, como câmera
- Um processador
- Um software
- Um dispositivo de exibição para monitorar o sistema
- Acessórios, como suportes para câmeras, cabos e conectores
Tarefas de visão computacional
OCR - No domínio da informática, Optical Character Reader, um software para converter documentos digitalizados em texto editável, que acompanha um scanner.
Face Detection- Muitas câmeras de última geração vêm com esse recurso, que permite ler o rosto e tirar a foto daquela expressão perfeita. É usado para permitir que um usuário acesse o software na correspondência correta.
Object Recognition - Eles estão instalados em supermercados, câmeras, carros de ponta como BMW, GM e Volvo.
Estimating Position - É estimar a posição de um objeto em relação à câmera como a posição do tumor no corpo humano.
Domínios de aplicativos de visão computacional
- Agriculture
- Veículos autônomos
- Biometrics
- Reconhecimento de personagem
- Perícia, segurança e vigilância
- Inspeção de qualidade industrial
- Reconhecimento facial
- Análise de gestos
- Geoscience
- Imagens médicas
- Monitoramento de poluição
- Controle do processo
- Sensoriamento remoto
- Robotics
- Transport
Aplicações da Robótica
A robótica tem sido instrumental em vários domínios, como -
Industries - Os robôs são usados para manuseio de material, corte, solda, revestimento de cor, perfuração, polimento, etc.
Military- Robôs autônomos podem alcançar zonas inacessíveis e perigosas durante a guerra. Um robô chamado Daksh , desenvolvido pela Organização de Pesquisa e Desenvolvimento de Defesa (DRDO), está em função de destruir objetos potencialmente fatais com segurança.
Medicine - Os robôs são capazes de realizar centenas de testes clínicos simultaneamente, reabilitar deficientes físicos permanentes e realizar cirurgias complexas, como tumores cerebrais.
Exploration - Os robôs escaladores de rocha usados para exploração espacial, drones subaquáticos usados para exploração do oceano são apenas alguns exemplos.
Entertainment - Os engenheiros da Disney criaram centenas de robôs para fazer filmes.
Ainda outra área de pesquisa em IA, redes neurais, é inspirada na rede neural natural do sistema nervoso humano.
O que são Redes Neurais Artificiais (RNAs)?
O inventor do primeiro neurocomputador, Dr. Robert Hecht-Nielsen, define uma rede neural como -
"... um sistema de computação composto de uma série de elementos de processamento simples e altamente interconectados, que processam informações por sua resposta de estado dinâmico a entradas externas."
Estrutura Básica de ANNs
A ideia das RNAs é baseada na crença de que o funcionamento do cérebro humano, fazendo as conexões certas, pode ser imitado usando silício e fios como neurons e dendrites.
O cérebro humano é composto por 86 bilhões de células nervosas chamadas neurons. Eles estão conectados a outras milhares de células por Axons.Os estímulos do ambiente externo ou entradas dos órgãos sensoriais são aceitos pelos dendritos. Essas entradas criam impulsos elétricos, que viajam rapidamente pela rede neural. Um neurônio pode então enviar a mensagem a outro neurônio para lidar com o problema ou não a envia.

ANNs são compostas por múltiplos nodes, que imitam o biológico neuronsdo cérebro humano. Os neurônios estão conectados por links e interagem uns com os outros. Os nós podem obter dados de entrada e executar operações simples nos dados. O resultado dessas operações é passado para outros neurônios. A saída de cada nó é chamada deactivation ou node value.
Cada link está associado a weight.As RNAs são capazes de aprender, o que ocorre alterando os valores de peso. A ilustração a seguir mostra um ANN simples -

Tipos de redes neurais artificiais
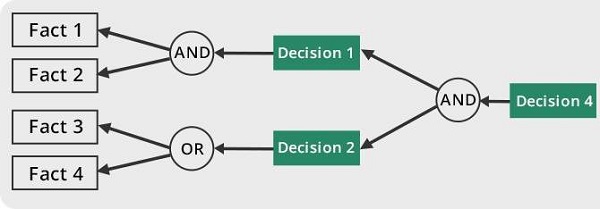
Existem duas topologias de Rede Neural Artificial - FeedForward e Feedback.
FeedForward ANN
Nesta RNA, o fluxo de informações é unidirecional. Uma unidade envia informações para outra unidade da qual não recebe nenhuma informação. Não há ciclos de feedback. Eles são usados na geração / reconhecimento / classificação de padrões. Eles têm entradas e saídas fixas.
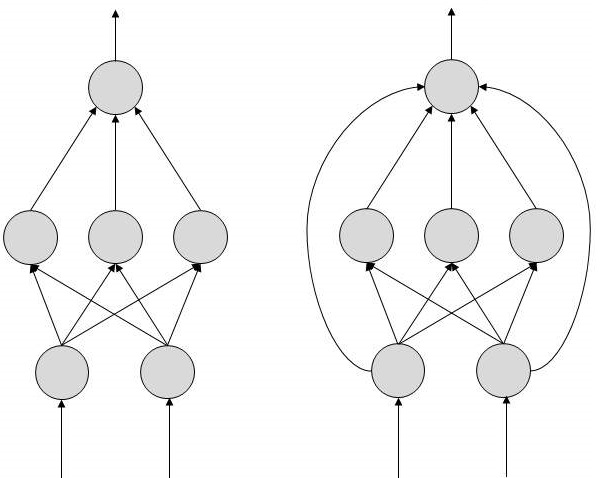
FeedBack ANN
Aqui, loops de feedback são permitidos. Eles são usados em memórias endereçáveis de conteúdo.
Trabalho de RNAs
Nos diagramas de topologia mostrados, cada seta representa uma conexão entre dois neurônios e indica o caminho para o fluxo de informações. Cada conexão tem um peso, um número inteiro que controla o sinal entre os dois neurônios.
Se a rede gerar uma saída “boa ou desejada”, não há necessidade de ajustar os pesos. No entanto, se a rede gerar uma saída “ruim ou indesejada” ou um erro, o sistema altera os pesos para melhorar os resultados subsequentes.
Aprendizado de máquina em ANNs
As RNAs são capazes de aprender e precisam ser treinadas. Existem várias estratégias de aprendizagem -
Supervised Learning- Envolve um professor que é mais estudioso do que a própria RNA. Por exemplo, o professor alimenta alguns dados de exemplo sobre os quais o professor já sabe as respostas.
Por exemplo, reconhecimento de padrões. A RNA apresenta suposições enquanto reconhece. Em seguida, o professor fornece as respostas à RNA. A rede então compara seus palpites com as respostas “corretas” do professor e faz ajustes de acordo com os erros.
Unsupervised Learning- É necessário quando não há conjunto de dados de exemplo com respostas conhecidas. Por exemplo, procurando um padrão oculto. Nesse caso, o agrupamento, isto é, a divisão de um conjunto de elementos em grupos de acordo com algum padrão desconhecido, é realizado com base nos conjuntos de dados existentes presentes.
Reinforcement Learning- Essa estratégia se baseia na observação. A RNA toma uma decisão observando seu ambiente. Se a observação for negativa, a rede ajusta seus pesos para poder tomar uma decisão diferente necessária na próxima vez.
Algoritmo de propagação posterior
É o algoritmo de treinamento ou aprendizado. Ele aprende pelo exemplo. Se você enviar ao algoritmo o exemplo do que deseja que a rede faça, ele altera os pesos da rede para que possa produzir a saída desejada para uma determinada entrada ao concluir o treinamento.
As redes de retropropagação são ideais para tarefas simples de reconhecimento de padrões e mapeamento.
Redes Bayesianas (BN)
Essas são as estruturas gráficas usadas para representar a relação probabilística entre um conjunto de variáveis aleatórias. Redes bayesianas também são chamadasBelief Networks ou Bayes Nets. Os BNs argumentam sobre o domínio incerto.
Nessas redes, cada nó representa uma variável aleatória com proposições específicas. Por exemplo, em um domínio de diagnóstico médico, o nó Câncer representa a proposição de que um paciente tem câncer.
As arestas que conectam os nós representam dependências probabilísticas entre essas variáveis aleatórias. Se de dois nós, um está afetando o outro, eles devem ser conectados diretamente nas direções do efeito. A força da relação entre as variáveis é quantificada pela probabilidade associada a cada nó.
Existe uma única restrição nos arcos em um BN que você não pode retornar a um nó simplesmente seguindo arcos direcionados. Conseqüentemente, os BNs são chamados de Gráficos Acíclicos Direcionados (DAGs).
Os BNs são capazes de lidar com variáveis de vários valores simultaneamente. As variáveis BN são compostas por duas dimensões -
- Gama de preposições
- Probabilidade atribuída a cada uma das preposições.
Considere um conjunto finito X = {X 1 , X 2 ,…, X n } de variáveis aleatórias discretas, onde cada variável X i pode obter valores de um conjunto finito, denotado por Val (X i ). Se houver um link direto da variável X i para a variável, X j , então a variável X i será um pai da variável X j mostrando dependências diretas entre as variáveis.
A estrutura do BN é ideal para combinar conhecimento prévio e dados observados. BN pode ser usado para aprender as relações causais e compreender vários domínios de problemas e para prever eventos futuros, mesmo no caso de dados ausentes.
Construindo uma Rede Bayesiana
Um engenheiro do conhecimento pode construir uma rede bayesiana. Há uma série de etapas que o engenheiro do conhecimento precisa realizar ao construí-lo.
Example problem- Câncer de pulmão. Um paciente está sofrendo de falta de ar. Ele visita o médico, suspeitando que ele tem câncer de pulmão. O médico sabe que, exceto o câncer de pulmão, existem várias outras doenças possíveis que o paciente pode ter, como tuberculose e bronquite.
Gather Relevant Information of Problem
- O paciente é fumante? Se sim, então há grandes chances de câncer e bronquite.
- O paciente está exposto à poluição do ar? Se sim, que tipo de poluição do ar?
- Faça um raio-X positivo. Um raio-X indicaria tuberculose ou câncer de pulmão.
Identify Interesting Variables
O engenheiro do conhecimento tenta responder às perguntas -
- Quais nós representar?
- Que valores eles podem assumir? Em que estado eles podem estar?
Por enquanto, vamos considerar nós, com apenas valores discretos. A variável deve assumir exatamente um desses valores por vez.
Common types of discrete nodes are -
Boolean nodes - Representam proposições, assumindo valores binários TRUE (T) e FALSE (F).
Ordered values- Um nó de poluição pode representar e obter valores de {baixo, médio, alto} descrevendo o grau de exposição de um paciente à poluição.
Integral values- Um nó chamado Idade pode representar a idade do paciente com valores possíveis de 1 a 120. Mesmo neste estágio inicial, as escolhas de modelagem estão sendo feitas.
Possíveis nós e valores para o exemplo de câncer de pulmão -
| Nome do Nó | Tipo | Valor | Criação de nós |
|---|---|---|---|
| Poluição | Binário | {BAIXO, ALTO, MÉDIO} |

|
| Fumante | boleano | {TRUE, FASLE} | |
| Câncer de pulmão | boleano | {TRUE, FASLE} | |
| Raio X | Binário | {Positivo negativo} |
Create Arcs between Nodes
A topologia da rede deve capturar relacionamentos qualitativos entre as variáveis.
Por exemplo, o que faz com que um paciente tenha câncer de pulmão? - Poluição e tabagismo. Em seguida, adicione arcos do nó Poluição e do nó Fumante ao nó Câncer de Pulmão.
Da mesma forma, se o paciente tiver câncer de pulmão, o resultado do raio-X será positivo. Em seguida, adicione arcos do nó Lung-Cancer ao nó X-Ray.

Specify Topology
Convencionalmente, os BNs são dispostos de forma que os arcos apontem de cima para baixo. O conjunto de nós pais de um nó X é dado por Pais (X).
O nodo pulmão-câncer tem dois pais (motivos ou causas): poluição e fumante , enquanto o nodo fumante é umancestordo nó X-Ray . Da mesma forma, o Raio-X é uma criança (consequência ou efeitos) do nodo Câncer de Pulmão esuccessorde nós Fumador e Poluição.
Conditional Probabilities
Agora quantifique as relações entre os nós conectados: isso é feito especificando uma distribuição de probabilidade condicional para cada nó. Como apenas variáveis discretas são consideradas aqui, isso assume a forma de umConditional Probability Table (CPT).
Primeiro, para cada nó, precisamos examinar todas as combinações possíveis de valores desses nós pais. Cada combinação é chamada deinstantiationdo conjunto pai. Para cada instanciação distinta dos valores do nó pai, precisamos especificar a probabilidade que o filho terá.
Por exemplo, os pais do nódulo Lung-Cancer são Poluição e Fumar. Eles assumem os valores possíveis = {(H, T), (H, F), (L, T), (L, F)}. O CPT especifica a probabilidade de câncer para cada um desses casos como <0,05, 0,02, 0,03, 0,001> respectivamente.
Cada nó terá probabilidade condicional associada da seguinte forma -

Aplicações de Redes Neurais
Eles podem realizar tarefas que são fáceis para um humano, mas difíceis para uma máquina -
Aerospace - Aeronaves de piloto automático, detecção de falhas de aeronaves.
Automotive - Sistemas de orientação automóvel.
Military - Orientação e direção da arma, rastreamento de alvo, discriminação de objetos, reconhecimento facial, identificação de sinal / imagem.
Electronics - Previsão de sequência de código, layout de chip IC, análise de falha de chip, visão de máquina, síntese de voz.
Financial - Avaliação imobiliária, consultor de empréstimos, triagem de hipotecas, classificação de títulos corporativos, programa de negociação de portfólio, análise financeira corporativa, previsão do valor da moeda, leitores de documentos, avaliadores de aplicativos de crédito.
Industrial - Controle de processo de manufatura, projeto e análise de produto, sistemas de inspeção de qualidade, análise de qualidade de soldagem, previsão de qualidade de papel, análise de projeto de produto químico, modelagem dinâmica de sistemas de processo químico, análise de manutenção de máquina, licitação de projeto, planejamento e gerenciamento.
Medical - Análise de células cancerosas, análise de EEG e ECG, desenho protético, otimizador de tempo de transplante.
Speech - Reconhecimento de fala, classificação de fala, conversão de texto em fala.
Telecommunications - Compressão de imagens e dados, serviços de informação automatizados, tradução em tempo real da língua falada.
Transportation - Diagnóstico do sistema de freios do caminhão, programação de veículos, sistemas de roteirização.
Software - Reconhecimento de padrões em reconhecimento facial, reconhecimento óptico de caracteres, etc.
Time Series Prediction - As RNAs são usadas para fazer previsões sobre estoques e calamidades naturais.
Signal Processing - As redes neurais podem ser treinadas para processar um sinal de áudio e filtrá-lo adequadamente nos aparelhos auditivos.
Control - As RNAs são freqüentemente usadas para tomar decisões de direção de veículos físicos.
Anomaly Detection - Como as RNAs são especialistas em reconhecer padrões, elas também podem ser treinadas para gerar uma saída quando algo incomum ocorre e não se ajusta ao padrão.
A IA está se desenvolvendo com uma velocidade incrível, às vezes parece mágica. Há uma opinião entre pesquisadores e desenvolvedores de que a IA poderia se tornar tão imensamente forte que seria difícil para os humanos controlar.
Os humanos desenvolveram sistemas de IA introduzindo neles todas as inteligências possíveis que podiam, pelas quais os próprios humanos agora parecem ameaçados.
Ameaça à privacidade
Um programa de IA que reconhece a fala e entende a linguagem natural é teoricamente capaz de entender cada conversa em e-mails e telefones.
Ameaça à Dignidade Humana
Os sistemas de IA já começaram a substituir os seres humanos em algumas indústrias. Não deve substituir as pessoas nos setores onde ocupam cargos dignos relacionados à ética, como enfermeiro, cirurgião, juiz, policial, etc.
Ameaça à Segurança
Os sistemas de IA de autoaperfeiçoamento podem se tornar tão poderosos que os humanos que pode ser muito difícil impedir que seus objetivos sejam alcançados, o que pode levar a consequências indesejadas.
Aqui está a lista de termos usados com frequência no domínio da IA -
| Sr. Não | Termo e Significado |
|---|---|
| 1 | Agent Agentes são sistemas ou programas de software com capacidade de raciocínio autônomo, objetivo e direcionado para um ou mais objetivos. Eles também são chamados de assistentes, corretores, bots, droids, agentes inteligentes e agentes de software. |
| 2 | Autonomous Robot Robô livre de controle ou influência externa e capaz de se controlar independentemente. |
| 3 | Backward Chaining Estratégia de trabalhar para trás por razão / causa de um problema. |
| 4 | Blackboard É a memória dentro do computador, que é usada para comunicação entre os sistemas especialistas cooperantes. |
| 5 | Environment É a parte do mundo real ou computacional habitada pelo agente. |
| 6 | Forward Chaining Estratégia de trabalhar adiante para conclusão / solução de um problema. |
| 7 | Heuristics É o conhecimento baseado em tentativa e erro, avaliações e experimentação. |
| 8 | Knowledge Engineering Adquirir conhecimento de especialistas humanos e outros recursos. |
| 9 | Percepts É o formato em que o agente obtém informações sobre o ambiente. |
| 10 | Pruning Substituindo considerações desnecessárias e irrelevantes em sistemas de IA. |
| 11 | Rule É um formato de representação da base de conhecimento no Sistema Especialista. Está na forma de IF-THEN-ELSE. |
| 12 | Shell Um shell é um software que ajuda a projetar mecanismo de inferência, base de conhecimento e interface de usuário de um sistema especialista. |
| 13 | Task É o objetivo que o agente tenta realizar. |
| 14 | Turing Test Um teste desenvolvido por Allan Turing para testar a inteligência de uma máquina em comparação com a inteligência humana. |