AI - อัลกอริทึมการค้นหายอดนิยม
การค้นหาเป็นเทคนิคสากลในการแก้ปัญหาใน AI มีเกมสำหรับผู้เล่นคนเดียวบางเกมเช่นเกมเรียงไพ่ซูโดกุคำไขว้ ฯลฯ อัลกอริทึมการค้นหาช่วยให้คุณค้นหาตำแหน่งเฉพาะในเกมดังกล่าว
ปัญหาการค้นหาตัวแทนเดี่ยว
เกมเช่น 3X3 แปดไทล์ 4X4 สิบห้าไทล์และ 5X5 ยี่สิบสี่ไทล์เป็นความท้าทายในการค้นหาเส้นทางตัวแทนเดียว ประกอบด้วยเมทริกซ์ของกระเบื้องกับกระเบื้องเปล่า ผู้เล่นจะต้องจัดเรียงกระเบื้องโดยการเลื่อนกระเบื้องในแนวตั้งหรือแนวนอนลงในพื้นที่ว่างโดยมีจุดประสงค์เพื่อบรรลุวัตถุประสงค์บางประการ
ตัวอย่างอื่น ๆ ของปัญหาการค้นหาเส้นทางตัวแทนรายเดียว ได้แก่ ปัญหาพนักงานขายการเดินทางลูกบาศก์ของรูบิคและการพิสูจน์ทฤษฎีบท
คำศัพท์การค้นหา
Problem Space- เป็นสภาพแวดล้อมที่การค้นหาเกิดขึ้น (ชุดของสถานะและชุดตัวดำเนินการเพื่อเปลี่ยนสถานะเหล่านั้น)
Problem Instance - เป็นสถานะเริ่มต้น + สถานะเป้าหมาย
Problem Space Graph- แสดงถึงสถานะปัญหา สถานะจะแสดงโดยโหนดและตัวดำเนินการจะแสดงตามขอบ
Depth of a problem - ความยาวของเส้นทางที่สั้นที่สุดหรือลำดับที่สั้นที่สุดของตัวดำเนินการจากสถานะเริ่มต้นไปยังสถานะเป้าหมาย
Space Complexity - จำนวนโหนดสูงสุดที่เก็บไว้ในหน่วยความจำ
Time Complexity - จำนวนโหนดสูงสุดที่สร้างขึ้น
Admissibility - คุณสมบัติของอัลกอริทึมเพื่อค้นหาโซลูชันที่เหมาะสมที่สุดเสมอ
Branching Factor - จำนวนโหนดลูกโดยเฉลี่ยในกราฟพื้นที่ปัญหา
Depth - ความยาวของเส้นทางที่สั้นที่สุดจากสถานะเริ่มต้นไปยังสถานะเป้าหมาย
กลยุทธ์การค้นหา Brute-Force
ง่ายที่สุดเนื่องจากไม่จำเป็นต้องมีความรู้เฉพาะโดเมน ทำงานได้ดีกับสถานะที่เป็นไปได้จำนวนน้อย
ข้อกำหนด -
- คำอธิบายสถานะ
- ชุดของตัวดำเนินการที่ถูกต้อง
- สถานะเริ่มต้น
- คำอธิบายสถานะเป้าหมาย
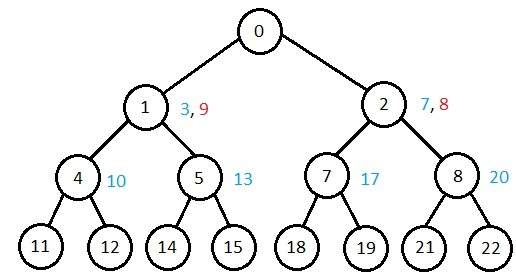
การค้นหาแบบกว้าง - แรก
เริ่มต้นจากโหนดรูทสำรวจโหนดใกล้เคียงก่อนและย้ายไปยังเพื่อนบ้านระดับถัดไป มันสร้างทีละต้นจนกว่าจะพบวิธีแก้ปัญหา สามารถใช้งานได้โดยใช้โครงสร้างข้อมูลคิว FIFO วิธีนี้ให้เส้นทางที่สั้นที่สุดในการแก้ปัญหา
ถ้า branching factor(ค่าเฉลี่ยของจำนวนโหนดลูกสำหรับโหนดที่กำหนด) = b และความลึก = d แล้วจำนวนโหนดในระดับ d = b d
ไม่มีโหนดทั้งหมดที่สร้างขึ้นในกรณีที่เลวร้ายที่สุดคือ B + B 2 b + 3 + ... + B d
Disadvantage- เนื่องจากแต่ละระดับของโหนดถูกบันทึกไว้สำหรับการสร้างโหนดถัดไปจึงใช้พื้นที่หน่วยความจำมาก ความต้องการพื้นที่ในการจัดเก็บโหนดเป็นเลขชี้กำลัง
ความซับซ้อนขึ้นอยู่กับจำนวนโหนด สามารถตรวจสอบโหนดที่ซ้ำกันได้

การค้นหาเชิงลึก - แรก
มันถูกนำไปใช้ในการเรียกซ้ำด้วยโครงสร้างข้อมูล LIFO stack มันสร้างชุดของโหนดเดียวกันกับวิธี Breadth-First เฉพาะในลำดับที่ต่างกัน
เนื่องจากโหนดบนพา ธ เดียวถูกเก็บไว้ในการวนซ้ำแต่ละครั้งจากรูทไปยังโหนดลีฟความต้องการพื้นที่ในการจัดเก็บโหนดจึงเป็นแบบเชิงเส้น ด้วยปัจจัยการแตกแขนงbและความลึกเท่ากับmพื้นที่เก็บข้อมูลคือbm
Disadvantage- อัลกอริทึมนี้อาจไม่ยุติและดำเนินต่อไปอย่างไม่มีที่สิ้นสุดบนเส้นทางเดียว วิธีแก้ปัญหานี้คือเลือกความลึกของการตัด หากการตัดในอุดมคติคือdและหากการตัดที่เลือกน้อยกว่าdอัลกอริทึมนี้อาจล้มเหลว หากการตัดที่เลือกมากกว่าdเวลาดำเนินการจะเพิ่มขึ้น
ความซับซ้อนของมันขึ้นอยู่กับจำนวนเส้นทาง ไม่สามารถตรวจสอบโหนดที่ซ้ำกันได้

การค้นหาแบบสองทิศทาง
ค้นหาจากสถานะเริ่มต้นและย้อนกลับจากสถานะเป้าหมายจนกว่าทั้งสองจะพบกันเพื่อระบุสถานะทั่วไป
เส้นทางจากสถานะเริ่มต้นเชื่อมต่อกับเส้นทางผกผันจากสถานะเป้าหมาย การค้นหาแต่ละครั้งทำได้ไม่เกินครึ่งหนึ่งของเส้นทางทั้งหมด
การค้นหาต้นทุนสม่ำเสมอ
การเรียงลำดับจะทำในการเพิ่มต้นทุนของเส้นทางไปยังโหนด จะขยายโหนดต้นทุนน้อยที่สุดเสมอ เหมือนกับการค้นหาแบบกว้างก่อนหากการเปลี่ยนแปลงแต่ละครั้งมีค่าใช้จ่ายเท่ากัน
สำรวจเส้นทางตามลำดับต้นทุนที่เพิ่มขึ้น
Disadvantage- สามารถมีเส้นทางยาวได้หลายเส้นทางโดยมีค่าใช้จ่าย≤ C * การค้นหา Uniform Cost ต้องสำรวจทั้งหมด
การค้นหาเชิงลึกแบบวนซ้ำ - การค้นหาครั้งแรก
ทำการค้นหาเชิงลึกก่อนถึงระดับ 1 เริ่มต้นใหม่ดำเนินการค้นหาเชิงลึกก่อนถึงระดับ 2 และดำเนินการต่อไปในลักษณะดังกล่าวจนกว่าจะพบโซลูชัน
จะไม่สร้างโหนดจนกว่าจะสร้างโหนดที่ต่ำกว่าทั้งหมด บันทึกเฉพาะสแต็กของโหนดเท่านั้น อัลกอริทึมปลายเมื่อพบวิธีการแก้ปัญหาที่ระดับความลึกd จำนวนโหนดที่สร้างขึ้นที่ความลึกdคือ b dและที่ความลึกd-1คือ b d-1
การเปรียบเทียบความซับซ้อนของอัลกอริทึมต่างๆ
ให้เราดูประสิทธิภาพของอัลกอริทึมตามเกณฑ์ต่างๆ -
| เกณฑ์ | ความกว้างก่อน | ความลึกก่อน | แบบสองทิศทาง | ต้นทุนสม่ำเสมอ | Interactive Deepening |
|---|---|---|---|---|---|
| เวลา | ขง | ขเมตร | ขง / 2 | ขง | ขง |
| พื้นที่ | ขง | ขเมตร | ขง / 2 | ขง | ขง |
| การเพิ่มประสิทธิภาพ | ใช่ | ไม่ | ใช่ | ใช่ | ใช่ |
| ความสมบูรณ์ | ใช่ | ไม่ | ใช่ | ใช่ | ใช่ |
กลยุทธ์การค้นหาข้อมูล (Heuristic)
ในการแก้ปัญหาขนาดใหญ่ที่มีสถานะเป็นไปได้จำนวนมากจำเป็นต้องเพิ่มความรู้เฉพาะปัญหาเพื่อเพิ่มประสิทธิภาพของอัลกอริทึมการค้นหา
ฟังก์ชั่นการประเมินฮิวริสติก
พวกเขาคำนวณต้นทุนของเส้นทางที่เหมาะสมระหว่างสองรัฐ ฟังก์ชันฮิวริสติกสำหรับเกมเลื่อนไทล์คำนวณโดยการนับจำนวนการเคลื่อนไหวที่แต่ละไทล์ทำจากสถานะเป้าหมายและเพิ่มจำนวนการเคลื่อนไหวเหล่านี้สำหรับไทล์ทั้งหมด
การค้นหา Heuristic บริสุทธิ์
ขยายโหนดตามลำดับของค่าฮิวริสติก สร้างสองรายการรายการปิดสำหรับโหนดที่ขยายแล้วและรายการเปิดสำหรับโหนดที่สร้างขึ้น แต่ยังไม่ขยาย
ในการวนซ้ำแต่ละครั้งโหนดที่มีค่าฮิวริสติกขั้นต่ำจะถูกขยายออกโหนดลูกทั้งหมดจะถูกสร้างและวางไว้ในรายการปิด จากนั้นฟังก์ชันฮิวริสติกจะถูกนำไปใช้กับโหนดลูกและจะถูกวางไว้ในรายการที่เปิดตามค่าฮิวริสติก เส้นทางที่สั้นกว่าจะถูกบันทึกและเส้นทางที่ยาวกว่าจะถูกกำจัด
ก * ค้นหา
เป็นรูปแบบการค้นหาที่ดีที่สุดที่รู้จักกันดีที่สุด หลีกเลี่ยงการขยายเส้นทางที่มีราคาแพงอยู่แล้ว แต่จะขยายเส้นทางที่มีแนวโน้มมากที่สุดก่อน
f (n) = g (n) + h (n) โดยที่
- g (n) ค่าใช้จ่าย (จนถึงปัจจุบัน) ในการเข้าถึงโหนด
- h (n) ต้นทุนโดยประมาณที่จะได้รับจากโหนดไปยังเป้าหมาย
- f (n) ต้นทุนทั้งหมดโดยประมาณของเส้นทางผ่าน n ไปยังเป้าหมาย ดำเนินการโดยใช้ลำดับความสำคัญโดยการเพิ่ม f (n)
การค้นหาครั้งแรกที่ดีที่สุดโลภ
ขยายโหนดที่คาดว่าใกล้เคียงกับเป้าหมายมากที่สุด ขยายโหนดตาม f (n) = h (n) ดำเนินการโดยใช้ลำดับความสำคัญคิว
Disadvantage- อาจติดอยู่ในลูป มันไม่เหมาะสม
อัลกอริทึมการค้นหาในท้องถิ่น
พวกเขาเริ่มต้นจากโซลูชันที่คาดหวังแล้วย้ายไปยังโซลูชันที่อยู่ใกล้เคียง พวกเขาสามารถส่งคืนโซลูชันที่ถูกต้องแม้ว่าจะถูกขัดจังหวะเมื่อใดก็ได้ก่อนที่จะสิ้นสุด
ค้นหา Hill-Climbing
เป็นอัลกอริทึมแบบวนซ้ำที่เริ่มต้นด้วยวิธีการแก้ปัญหาโดยพลการและพยายามหาทางออกที่ดีกว่าโดยการเปลี่ยนองค์ประกอบเดียวของโซลูชันทีละน้อย หากการเปลี่ยนแปลงก่อให้เกิดทางออกที่ดีกว่าการเปลี่ยนแปลงที่เพิ่มขึ้นจะถือเป็นโซลูชันใหม่ กระบวนการนี้จะทำซ้ำจนกว่าจะไม่มีการปรับปรุงเพิ่มเติม
ฟังก์ชัน Hill-Climbing (ปัญหา) ส่งคืนสถานะที่เป็นค่าสูงสุดในท้องถิ่น
inputs: problem, a problem
local variables: current, a node
neighbor, a node
current <-Make_Node(Initial-State[problem])
loop
do neighbor <- a highest_valued successor of current
if Value[neighbor] ≤ Value[current] then
return State[current]
current <- neighbor
endDisadvantage - อัลกอริทึมนี้ไม่สมบูรณ์หรือเหมาะสมที่สุด
ค้นหา Beam ในท้องถิ่น
ในอัลกอริทึมนี้จะมีจำนวนสถานะ k ในช่วงเวลาใดเวลาหนึ่ง ในช่วงเริ่มต้นสถานะเหล่านี้จะถูกสร้างขึ้นแบบสุ่ม ผู้สืบทอดของ k รัฐเหล่านี้คำนวณโดยใช้ฟังก์ชันวัตถุประสงค์ หากตัวต่อใด ๆ เหล่านี้เป็นค่าสูงสุดของฟังก์ชันวัตถุประสงค์อัลกอริทึมจะหยุด
มิฉะนั้นสถานะ (k เริ่มต้นและจำนวน k ของตัวตายตัวแทนของสถานะ = 2k) จะถูกวางไว้ในพูล จากนั้นพูลจะเรียงตามตัวเลข สถานะ k สูงสุดจะถูกเลือกเป็นสถานะเริ่มต้นใหม่ กระบวนการนี้จะดำเนินต่อไปจนกว่าจะถึงค่าสูงสุด
ฟังก์ชัน BeamSearch ( ปัญหา k ) ส่งกลับสถานะโซลูชัน
start with k randomly generated states
loop
generate all successors of all k states
if any of the states = solution, then return the state
else select the k best successors
endการหลอมจำลอง
การหลอมเป็นกระบวนการของการให้ความร้อนและการทำให้โลหะเย็นลงเพื่อเปลี่ยนโครงสร้างภายในสำหรับการปรับเปลี่ยนคุณสมบัติทางกายภาพ เมื่อโลหะเย็นตัวโครงสร้างใหม่จะถูกยึดและโลหะยังคงคุณสมบัติที่ได้รับใหม่ ในกระบวนการอบอ่อนแบบจำลองอุณหภูมิจะคงที่ไม่เปลี่ยนแปลง
ในตอนแรกเราตั้งอุณหภูมิไว้สูงแล้วปล่อยให้ 'เย็นลง' อย่างช้าๆเมื่ออัลกอริทึมดำเนินการ เมื่ออุณหภูมิสูงอัลกอริทึมจะได้รับอนุญาตให้ยอมรับวิธีแก้ปัญหาที่แย่กว่าด้วยความถี่สูง
เริ่ม
- เริ่มต้น k = 0; L = จำนวนเต็มของตัวแปร;
- จาก i → j ค้นหาความแตกต่างของประสิทธิภาพΔ
- ถ้าΔ <= 0 ให้ยอมรับ else ถ้า exp (-Δ / T (k))> สุ่ม (0,1) แล้วยอมรับ;
- ทำซ้ำขั้นตอนที่ 1 และ 2 สำหรับขั้นตอน L (k)
- k = k + 1;
ทำซ้ำขั้นตอนที่ 1 ถึง 4 จนครบตามเกณฑ์
สิ้นสุด
ปัญหาพนักงานขายในการเดินทาง
ในอัลกอริทึมนี้มีวัตถุประสงค์เพื่อค้นหาทัวร์ราคาประหยัดที่เริ่มต้นจากเมืองเยี่ยมชมเมืองทั้งหมดระหว่างทางในครั้งเดียวและสิ้นสุดที่เมืองเริ่มต้นเดียวกัน
Start
Find out all (n -1)! Possible solutions, where n is the total number of cities.
Determine the minimum cost by finding out the cost of each of these (n -1)! solutions.
Finally, keep the one with the minimum cost.
end