Electronique de puissance - Guide rapide
L'électronique de puissance fait référence au processus de contrôle du flux de courant et de tension et à sa conversion en une forme adaptée aux charges des utilisateurs. Le système électronique de puissance le plus souhaitable est celui dont l'efficacité et la fiabilité sont de 100%.
Jetez un œil au diagramme suivant. Il montre les composants d'un système Power Electronic et comment ils sont interconnectés.
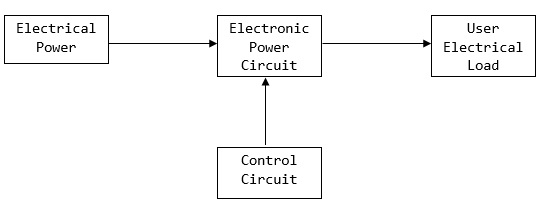
Un système électronique de puissance convertit l'énergie électrique d'une forme à une autre et garantit que ce qui suit est atteint -
- Efficacité maximale
- Fiabilité maximale
- Disponibilité maximale
- Coût minimum
- Moins de poids
- Petite taille
Les applications de l'électronique de puissance sont classées en deux types: les applications statiques et les applications d'entraînement.
Applications statiques
Cela utilise des pièces mécaniques mobiles et / ou rotatives telles que le soudage, le chauffage, le refroidissement, l'électrodéposition et l'alimentation CC.
Alimentation DC

Applications de conduite
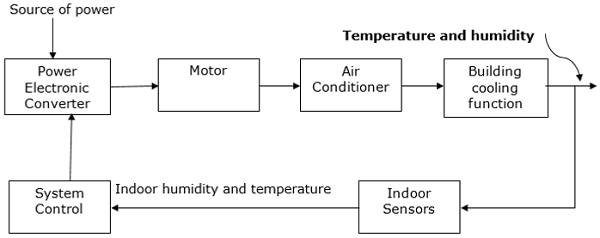
Les applications d'entraînement ont des pièces rotatives telles que des moteurs. Les exemples incluent les compresseurs, les pompes, les bandes transporteuses et les systèmes de climatisation.
Système de conditionnement d'air
L'électronique de puissance est largement utilisée dans les climatiseurs pour contrôler des éléments tels que les compresseurs. Un diagramme schématique qui montre comment l'électronique de puissance est utilisée dans les climatiseurs est présenté ci-dessous.
Un dispositif de commutation électronique de puissance est une combinaison de pilotes de semi-conducteurs de puissance commutables actifs qui ont été intégrés en un seul. Les principales caractéristiques du commutateur sont déterminées par la corrélation interne des fonctions et des interactions de son système intégré. La figure ci-dessous montre comment fonctionne un système de commutation électronique de puissance.
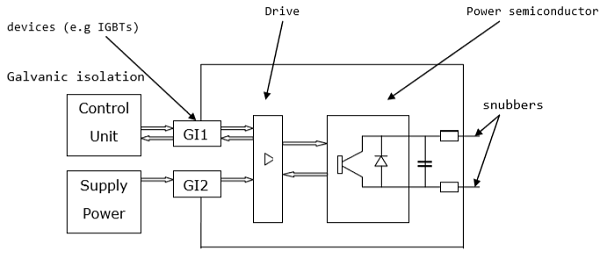
Le circuit externe du schéma ci-dessus est généralement maintenu à un potentiel élevé par rapport à l'unité de commande. Les émetteurs inductifs sont utilisés pour prendre en charge la différence de potentiel requise entre les deux interfaces.
Les dispositifs de commutation de puissance sont normalement sélectionnés en fonction de la valeur nominale à laquelle ils gèrent la puissance, c'est-à-dire du produit de leur courant et de leur tension au lieu de leur taux de dissipation de puissance. Par conséquent, la principale caractéristique intéressante d'un commutateur électronique de puissance est sa capacité à dissiper une puissance faible ou presque nulle. En conséquence, le commutateur électronique est capable de réaliser une surtension faible et continue.
Les éléments de circuit linéaire font référence aux composants d'un circuit électrique qui présentent une relation linéaire entre l'entrée de courant et la sortie de tension. Des exemples d'éléments avec des circuits linéaires comprennent -
- Resistors
- Capacitors
- Inductors
- Transformers
Pour mieux comprendre les éléments de circuit linéaire, une analyse des éléments de résistance est nécessaire.
Résistances
Une résistance est un dispositif dans lequel le flux d'un courant électrique est restreint, ce qui entraîne une conversion d'énergie. Par exemple, lorsque l'électricité circule à travers une ampoule, l'électricité est convertie en une forme d'énergie différente telle que la chaleur et / ou la lumière. La résistance d'un élément est mesurée en ohms (Ω).
La mesure de la résistance dans un circuit donné est donnée par -
$$R=\rho \frac{L}{A}$$Où R - résistance; ρ - résistivité; L- longueur de fil; etA - section transversale du fil
Symbole de diverses résistances
| Résistance |

|
| Une résistance variable |
|
| Un potentiomètre |
|
Condensateurs
Un condensateur fait référence à un appareil électrique qui a deux matériaux conducteurs (également appelés plaques) séparés par un isolant appelé diélectrique. Il utilise un champ électrique pour stocker l'énergie électrique. Le champ électrique se développe lorsque le condensateur est connecté à une batterie, faisant ainsi s'accumuler des charges électriques positives sur une plaque et des charges électriques négatives sur l'autre plaque.
Lorsque l'énergie est stockée dans le champ électrique d'un condensateur, le processus est appelé charge, et lorsque l'énergie est retirée, le processus est appelé décharge. Le niveau d'énergie électrique stocké dans un condensateur est appelé capacité et se mesure en farads (F). Un farad équivaut à un coulomb par unité de volt donné par 1 C / V.
La différence entre un condensateur et une batterie est qu'un condensateur stocke de l'énergie électrique tandis qu'une batterie stocke de l'énergie chimique et libère l'énergie à un rythme lent.
Symbole de divers condensateurs
Les différents symboles d'un condensateur sont donnés dans le tableau ci-dessous.
| Condensateur fixe |
|
| Condensateur variable |
|
| Condensateur polarisé |
|
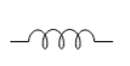
Inducteurs
Les inducteurs sont des appareils électroniques qui utilisent un champ magnétique pour stocker l'énergie électrique. La forme la plus simple d'un inducteur est une bobine ou un fil en forme de boucle où l'inductance est directement proportionnelle au nombre de boucles dans le fil. De plus, l'inductance dépend du type de matériau du fil et du rayon de la boucle.
Compte tenu d'un certain nombre de tours et de la taille du rayon, seul le noyau d'air peut entraîner la moindre inductance. Les matériaux diélectriques, qui servent le même but que l'air, comprennent le bois, le verre et le plastique. Ces matériaux aident au processus d'enroulement de l'inducteur. La forme des enroulements (forme de beignet) ainsi que les substances ferromagnétiques, par exemple le fer, augmentent l'inductance totale.
La quantité d'énergie qu'un inducteur peut stocker est appelée inductance. Il est mesuré en Henry (H).
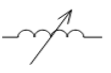
Symbole de divers inducteurs
| Inducteur fixe |
|
| Inducteur variable |
|
Transformateurs
Il s'agit d'un appareil qui modifie l'énergie d'un niveau à un autre grâce à un processus appelé induction électromagnétique. Il est généralement utilisé pour augmenter ou réduire les tensions CA dans les applications utilisant l'énergie électrique.
Lorsque le courant du côté primaire du transformateur varie, un flux magnétique varié est créé sur son noyau, qui se propage aux enroulements secondaires du transformateur sous forme de champs magnétiques.
Le principe de fonctionnement d'un transformateur repose sur la loi de Faraday de l'induction électromagnétique. La loi stipule que le taux de changement de la liaison de flux par rapport au temps est directement lié à l'EMF induit dans un conducteur.
Un transformateur a trois parties principales -
- Enroulement primaire
- Noyau magnétique
- Enroulement secondaire
Symbole d'un transformateur
Appareils supplémentaires
Appareils électromagnétiques
Le concept d'électromagnétisme est largement utilisé dans la technologie et il est appliqué dans les moteurs, les générateurs et les cloches électriques. Par exemple, dans une sonnette, le composant électromagnétique attire un battant qui frappe la cloche et la fait sonner.
Contrôleurs
Les contrôleurs sont des dispositifs qui reçoivent des signaux électroniques transférés à partir d'une variable mesurée dans un processus et comparent la valeur obtenue avec un point de consigne de contrôle. Il utilise des algorithmes numériques pour corréler et comparer les fonctions.
Capteurs
Les capteurs sont utilisés pour déterminer le courant, qui varie constamment pour fournir une rétroaction à des fins de contrôle. La détection du courant permet d'obtenir une fonction de conversion fluide et précise. Les capteurs de courant sont essentiels dans les convertisseurs de sorte que les informations dans les convertisseurs parallèles ou multiphasés soient facilement partagées.
Filtres
Des filtres électroniques sont également utilisés pour effectuer le traitement des signaux afin d'éliminer les fréquences indésirables. Ce sont des circuits analogiques et existent à l'état actif ou passif.
Un redresseur commandé au silicium ou un redresseur commandé par semi-conducteur est un dispositif de commande de courant à semi-conducteur à quatre couches. Le nom «redresseur commandé au silicium» est le nom commercial de General Electric pour un type de thyristor.
Les SCR sont principalement utilisés dans les appareils électroniques qui nécessitent le contrôle de la haute tension et de la puissance. Cela les rend applicables dans les opérations de puissance CA moyenne et élevée telles que la fonction de commande du moteur.
Un SCR conduit lorsqu'une impulsion de grille lui est appliquée, tout comme une diode. Il a quatre couches de semi-conducteurs qui forment deux structures à savoir; NPNP ou PNPN. De plus, il possède trois jonctions étiquetées J1, J2 et J3 et trois bornes (anode, cathode et une grille). Un SCR est représenté schématiquement comme indiqué ci-dessous.
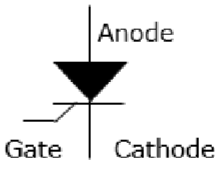
L'anode se connecte au type P, la cathode au type N et la grille au type P comme indiqué ci-dessous.
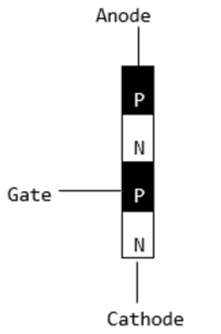
Dans un SCR, le semi-conducteur intrinsèque est du silicium auquel les dopants requis sont infusés. Cependant, le dopage d'une jonction PNPN dépend de l'application SCR.
Modes de fonctionnement dans SCR
OFF state (forward blocking mode)- Ici, l'anode reçoit une tension positive, la grille reçoit une tension nulle (déconnectée) et la cathode reçoit une tension négative. En conséquence, les jonctions J1 et J3 sont en polarisation directe tandis que J2 est en polarisation inverse. J2 atteint sa valeur d'avalanche de claquage et commence à conduire. En dessous de cette valeur, la résistance de J1 est significativement élevée et est donc dite à l'état bloqué.
ON state (conducting mode)- Un SCR est amené à cet état soit en augmentant la différence de potentiel entre l'anode et la cathode au-dessus de la tension d'avalanche, soit en appliquant un signal positif à la grille. Immédiatement le SCR commence à conduire, la tension de grille n'est plus nécessaire pour maintenir l'état ON et est donc désactivée par -
Diminution du flux de courant à travers lui à la valeur la plus basse appelée courant de maintien
Utilisation d'un transistor placé à travers la jonction.
Reverse blocking- Cela compense la chute de tension directe. Cela est dû au fait qu'une région faiblement dopée dans P1 est nécessaire. Il est important de noter que les valeurs de tension du blocage direct et inverse sont égales.
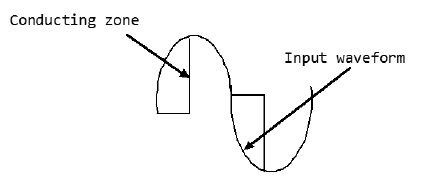
L'acronyme TRIAC signifie Triode pour courant alternatif. Un TRIAC est un dispositif semi-conducteur avec trois bornes qui contrôlent le flux de courant, d'où le nom Triac. Contrairement à SCR, TRIAC est bidirectionnel tandis que SCR est bidirectionnel. Il est idéal pour un fonctionnement utilisant une alimentation CA à des fins de commutation car il peut contrôler le flux de courant pour les deux moitiés dans un cycle de courant alternatif. Ceci expliqué clairement dans le diagramme ci-dessous.
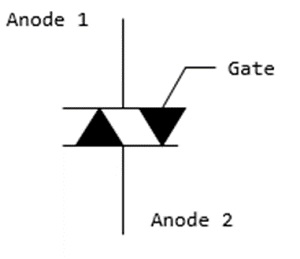
Symbole TRIAC
Le schéma de circuit d'un TRIAC est illustré ci-dessous. Il ressemble à deux thyristors placés dos à dos.
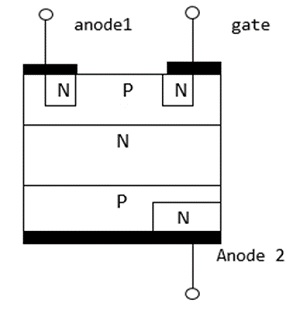
Structure du TRIAC
La structure TRIAC est considérée comme un DIAC ayant un contact de porte supplémentaire intégré pour assurer le contrôle de l'appareil. Semblable à d'autres appareils d'alimentation, le TRIAC est fabriqué à partir de silicium. Par conséquent, le processus de fabrication du silicium conduit à la production d'appareils moins chers. Comme indiqué ci-dessous, le TRIAC a six domaines à savoir; quatre régions de type N et deux régions de type P.
Fonctionnement du TRIAC
Le fonctionnement du TRIAC est basé sur le thyristor. Il facilite la fonction de commutation dans les composants et systèmes électriques AC. Ils sont largement utilisés dans les variateurs de lumière car ils permettent d'utiliser les deux moitiés du cycle CA. En conséquence, cela les rend plus efficaces dans la consommation d'énergie. Dans la mesure où il est possible d'utiliser des thyristors pour fonctionner en TRIAC, ce n'est pas rentable pour les opérations nécessitant une faible puissance. Il est possible de visualiser un TRIAC en termes de deux thyristors.

Les TRIAC sont normalement utilisés dans des applications qui ne nécessitent pas une puissance très élevée car ils présentent une commutation non symétrique dans leur fonctionnement. Ceci est désavantageux pour les applications utilisant une puissance élevée car cela provoque des interférences électromagnétiques. En conséquence, les TRIAC sont utilisés dans les commandes de moteur, les gradateurs d'éclairage résidentiels légers et les petits ventilateurs électriques pour contrôler la vitesse.
Un transistor bipolaire à jonction (BJT) est un transistor dont le fonctionnement dépend du contact effectué par deux semi-conducteurs. Il peut agir comme un interrupteur, un amplificateur ou un oscillateur. Il est connu sous le nom de transistor bipolaire car son fonctionnement nécessite deux types de porteurs de charge (trous et électrons). Les trous constituent les porteurs de charge dominants dans les semi-conducteurs de type P tandis que les électrons sont les principaux porteurs de charge dans les semi-conducteurs de type N.
Symboles d'un BJT

Structure d'un BJT
Un BJT a deux jonctions PN connectées dos à dos et partageant une région B commune (base). Cela garantit que les contacts sont établis dans toutes les régions qui sont la base, le collecteur et l'émetteur. La structure d'un transistor bipolaire PNP est illustrée ci-dessous.
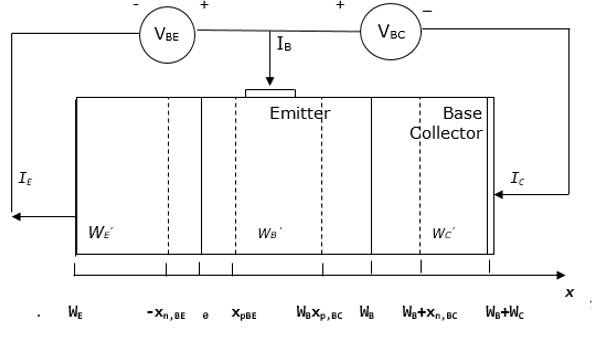
Le BJT illustré ci-dessus se compose de deux diodes connectées dos à dos, ce qui entraîne l'épuisement des régions dites quasi-neutres. Les largeurs de quasi-neutre de l'émetteur, de la base et du collecteur sont indiquées ci-dessus par W E ', W B ' et W C '. Ils sont obtenus comme suit -
$$W_{E}^{'}=W_{E}-X_{n,BE}$$ $$W_{B}^{'}=W_{B}-X_{p,BE}-X_{p,BC}$$ $$W_{C}^{'}=W_{C}-X_{n,BC}$$Les signes conventionnels des courants de l'émetteur, la base et le collecteur sont désignées par I E , I B et I C , respectivement. Par conséquent, le collecteur et le courant de base sont positifs lorsqu'un courant positif rencontre le collecteur ou le contact de base. De plus, le courant de l'émetteur est positif lorsque le courant quitte le contact de l'émetteur. Donc,
$$I_{E}=I_{B}+I_{C}$$Lorsqu'une tension positive est appliquée au contact de base par rapport au collecteur et à l'émetteur, la tension base-collecteur ainsi que la tension base-émetteur deviennent positives.
Pour simplifier, V CE est supposé égal à zéro.
La diffusion des électrons se produit de l'émetteur vers la base tandis que la diffusion des trous provient de la base vers l'émetteur. Une fois que les électrons atteignent la région appauvrie en base-collecteur, ils sont balayés à travers la région par un champ électrique. Ces électrons forment le courant du collecteur.
Lorsqu'un BJT est polarisé en mode actif direct, le courant total de l'émetteur est obtenu en additionnant le courant de diffusion d'électrons ( I E, n ), le courant de diffusion de trou ( I E, p ) et le courant d'émetteur de base.
$$I_{E}=I_{E,n}+I_{E,p}+I_{r,d}$$Le courant total du collecteur est donné par le courant de diffusion d'électrons ( I E, n ), moins le courant de recombinaison de base ( I r, B ).
$$I_{C}=I_{E,n}-I_{r,B}$$La somme du courant de base I B est obtenue en additionnant le courant de diffusion de trou ( I E, p ), le courant de recombinaison de base ( I r, B ) et le courant de recombinaison base-émetteur de la couche d'appauvrissement ( I r, d ).
$$I_{B}=I_{E,p}+I_{r,B}+I_{r,d}$$Facteur de transport
Ceci est donné par le rapport du courant du collecteur et du courant de l'émetteur.
$$\alpha =\frac{I_{C}}{I_{E}}$$En appliquant la loi actuelle de Kirchhoff, on constate que le courant de base est donné par la différence entre le courant d'émetteur et le courant de collecteur.
Gain actuel
Ceci est donné par le rapport du courant du collecteur au courant de base.
$$\beta =\frac{I_{C}}{I_{B}}=\frac{\alpha }{1-\alpha }$$Ce qui précède explique comment un BJT peut produire une amplification de courant. Le facteur de transport (α) approche un si le courant du collecteur est presque équivalent au courant de l'émetteur. Le gain de courant (β) devient alors supérieur à un.
Pour une analyse plus approfondie, le facteur de transport (α) est réécrit comme un produit de l'efficacité de l'émetteur (γ E ), du facteur de transport de base (α T ) et du facteur de recombinaison de la couche d'appauvrissement (δ r ). Il est réécrit comme suit -
$$\alpha =\gamma _{E}\times \alpha _{T}\times \delta _{r}$$Ce qui suit est un résumé de l'efficacité de l'émetteur discutée, du facteur de transport de base et du facteur de recombinaison de la couche d'appauvrissement.
Efficacité de l'émetteur
$$\gamma _{E}=\frac{I_{E,n}}{I_{E,p}+I_{E,P}}$$Facteur de transport de base
$$\alpha _{T}=\frac{I_{E,n}-I_{r,b}}{I_{E,n}}$$Facteur de recombinaison de la couche d'épuisement
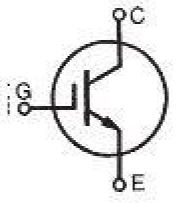
$$\delta _{r}=\frac{I_{E}-I_{r,d}}{I_{E,n}}$$Le transistor bipolaire à grille isolée (IGBT) est un dispositif semi-conducteur à trois bornes et est principalement utilisé comme interrupteur électronique. Il se caractérise par une commutation rapide et un rendement élevé, ce qui en fait un composant nécessaire dans les appareils modernes tels que les ballasts de lampes, les voitures électriques et les entraînements à fréquence variable (VFD).
Sa capacité à s'allumer et à s'éteindre rapidement le rend applicable dans les amplificateurs pour traiter des modèles d'onde complexes avec modulation de largeur d'impulsion. L'IGBT combine les caractéristiques des MOSFET et des BJT pour atteindre respectivement une capacité de tension à courant élevé et à faible saturation. Il intègre une grille isolée utilisant un FET (Transistor à effet de champ) pour obtenir une entrée de commande.
Symbole IGBT
L'amplification d'un IGBT est calculée par le rapport de son signal de sortie à son signal d'entrée. Dans les BJT conventionnels, le degré de gain (β) est égal au rapport de son courant de sortie au courant d'entrée.
L'IGBT a une très faible valeur de résistance à l'état ON (RON) qu'un MOSFET. Cela implique que la chute de tension (I 2 R) aux bornes du bipolaire pour une opération de commutation particulière est très faible. L'action de blocage avant de l'IGBT est similaire à celle d'un MOSFET.
Lorsqu'un IGBT est utilisé comme interrupteur contrôlé dans un état statique, son courant et sa tension sont égaux à ceux du BJT. Au contraire, la porte isolée de l'IGBT facilite le pilotage des charges BJT et nécessite donc moins d'énergie.
L'IGBT est activé ou désactivé selon que sa borne de portail a été activée ou désactivée. Une différence de potentiel positive constante entre la porte et l'émetteur maintient l'IGBT à l'état ON. Lorsque le signal d'entrée est supprimé, l'IGBT est désactivé.
Principe de fonctionnement de l'IGBT
L'IGBT ne nécessite qu'une faible tension pour maintenir la conduction dans l'appareil contrairement à BJT. L'IGBT est un appareil unidirectionnel, c'est-à-dire qu'il ne peut s'allumer que dans le sens avant. Cela signifie que le courant circule du collecteur vers l'émetteur contrairement aux MOSFET, qui sont bidirectionnels.
Applications de l'IGBT
L'IGBT est utilisé dans des applications de puissance moyenne à très élevée, par exemple les moteurs de traction. Dans les grands IGBT, il est possible de gérer un courant élevé de l'ordre de cent ampères et des tensions de blocage allant jusqu'à 6kv.
Les IGBT sont également utilisés dans les appareils électroniques de puissance tels que les convertisseurs, les onduleurs et d'autres appareils où la nécessité d'une commutation à semi-conducteurs est nécessaire. Les bipolaires sont disponibles avec un courant et une tension élevés. Cependant, leurs vitesses de commutation sont faibles. Au contraire, les MOSFET ont des vitesses de commutation élevées bien qu'ils soient coûteux.
Le transistor à effet de champ à semi-conducteur à oxyde métallique (MOSFET) est un type de transistor utilisé pour commuter des signaux électroniques. Il dispose de quatre terminaux à savoir; source (S), drain (D), porte (G) et corps (B) .Le corps du MOSFET est normalement connecté à la borne de la source (S), ce qui se traduit par un dispositif à trois bornes similaire à d'autres transistors à effet de champ ( FET). Étant donné que ces deux bornes principales sont généralement interconnectées par court-circuit, seules trois bornes sont visibles sur les schémas électriques.
Il s'agit de l'appareil le plus courant dans les circuits à la fois numériques et analogiques. Comparé au transistor ordinaire, un MOSFET a besoin d'un faible courant (moins d'un millième d'ampère) pour s'allumer. En même temps, il délivre une charge de courant élevée de plus de 50 ampères.
Fonctionnement d'un MOSFET
Le MOSFET a une fine couche de dioxyde de silicium, qui agit comme la plaque d'un condensateur. L'isolation de la porte de contrôle élève la résistance du MOSFET à des niveaux extrêmement élevés (presque infinis).
Le terminal de porte est exclu de la voie de courant primaire; ainsi, aucun courant ne s'échappe dans la grille.
Les MOSFET existent sous deux formes principales -
Depletion state- Cela nécessite la tension grille-source (V GB ) pour éteindre le composant. Lorsque la porte est à zéro (V GB ), l'appareil est généralement allumé, par conséquent, il fonctionne comme une résistance de charge pour des circuits logiques donnés. Pour les appareils de chargement avec un épuisement de type N, 3V est la tension de seuil où l'appareil est éteint en commutant la porte à moins de 3V.
Enhancement state- La tension grille-source (V GB ) est nécessaire dans cet état pour mettre le composant sous tension. Lorsque la porte est à zéro (V GB ), l'appareil est généralement éteint et peut être allumé en s'assurant que la tension de grille est supérieure à la tension source.
Symbole et construction de base

Où, D - Égoutter; G - Porte; S- Source; etSub - Substrat
A (BJT) émet un courant de 1 mA et a une efficacité d'émetteur de 0,99. Le facteur de transport de base est de 0,994 et le facteur de recombinaison de la couche d'appauvrissement est de 0,997. Pour le BJT, calculez ce qui suit -
Le facteur transport
Le facteur de transport réécrit est donné par -
$$\alpha =\gamma _{E}\times \alpha _{T}\times \delta _{r}$$En substituant les valeurs, nous obtenons
$$\alpha =0.99\times 0.994\times 0.997=0.981$$Le gain actuel
Le gain de courant est donné par -
$$\beta =\frac{I_{C}}{I_{B}}=\frac{\alpha }{1-\alpha }$$En substituant les valeurs, nous obtenons
$$\beta =\frac{0.981}{1-0.981}=51.6$$Le courant du collecteur
$$I_{C}=\alpha \times I_{E}=0.981\times 1=0.981mA$$Le courant de base
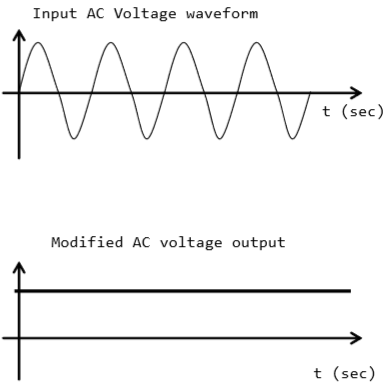
$$I_{B}=I_{E}-I_{C}=1-0.981=19\mu A$$Convertisseur à phase contrôlée
Un convertisseur commandé par phase convertit l'énergie CA en énergie CC (commutée par ligne). En d'autres termes, il est utilisé dans la conversion de la puissance alternative à fréquence fixe et à tension fixe en sortie de tension continue variable. Il est exprimé comme
Fixed Input - Tension, fréquence et puissance CA
Variable output - Sortie de tension continue
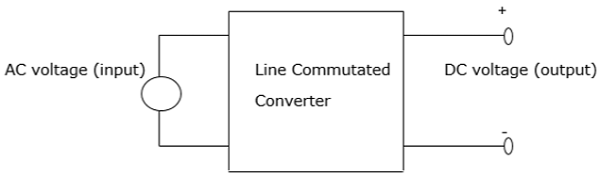
La tension d'entrée CA qui entre dans un convertisseur est normalement à RMS fixe (quadratique moyenne) et à fréquence fixe. L'inclusion de thyristors commandés en phase dans le convertisseur garantit l'obtention d'une tension de sortie CC variable. Ceci est rendu possible en modifiant l'angle de phase auquel les thyristors sont déclenchés. En conséquence, une forme d'onde pulsée du courant de charge est obtenue.
Pendant le demi-cycle d'alimentation d'entrée, le thyristor est en polarisation directe et est mis en MARCHE via l'application d'une impulsion de grille suffisante (déclenchement). Le courant commence à circuler une fois que le thyristor est allumé, c'est-à-dire en un point ωt = α au point ωt = β. Au moment où le courant de charge tombe à zéro, le thyristor s'éteint suite à une commutation de ligne (naturelle).
Il existe un certain nombre de convertisseurs de puissance qui utilisent la commutation naturelle. Ceux-ci comprennent -
- Convertisseurs CA / CC
- Convertisseurs CA en CA
- Contrôleurs de tension alternative
- Cycloconverters
Les convertisseurs de puissance ci-dessus seront expliqués dans les prochains chapitres de ce didacticiel.
2- Convertisseur d'impulsions
Un convertisseur d'impulsions à 2 phases, également connu sous le nom de générateur de modulateur de largeur d'impulsion (PWM) de niveau 2, est utilisé pour générer des impulsions pour les convertisseurs de modulation de largeur d'impulsion basés sur la porteuse. Il le fait en utilisant une topologie de niveau deux. Ce bloc contrôle les dispositifs de commutation à des fins de contrôle comme les IGBT et les FET qui existent dans trois types de convertisseurs à savoir -
- 1 bras (demi-pont monophasé)
- 2 bras (pont complet monophasé)
- 3 bras (pont triphasé)
Le signal d'entrée de référence dans un convertisseur à 2 impulsions est comparé à une porteuse. Si le signal d'entrée de référence est supérieur à la porteuse, l'impulsion est égale à 1 pour l'appareil supérieur et à 0 pour l'appareil inférieur.
Afin de contrôler un appareil avec un pont complet monophasé (2 bras), il est nécessaire d'appliquer une modulation de largeur d'impulsion unipolaire ou bipolaire. En modulation unipolaire, chacun des deux bras est contrôlé indépendamment. Un deuxième signal d'entrée de référence est généré en interne par un décalage du point de référence initial de 180 °
Lorsque le PWM bipolaire est appliqué, l'état du dispositif de commutation inférieur dans le second pont complet monophasé est similaire à celui du commutateur supérieur dans le premier dispositif à pont complet monophasé. L'utilisation d'une modulation unipolaire conduit à des formes d'onde CA lisses tandis que la modulation bipolaire entraîne une tension moins variable.
Convertisseur 3 impulsions
Considérons un convertisseur triphasé à 3 impulsions, où chacun des thyristors est en mode de conduction pendant le troisième du cycle d'alimentation. Le premier moment où un thyristor est déclenché en conduction est à 30 ° par rapport à la tension de phase.
Son fonctionnement est expliqué à l'aide de trois thyristors et de trois diodes. Lorsque les thyristors T1, T2 et T3 seront remplacés par des diodes D1, D2 et D3, la conduction commencera sous un angle de 30 ° par rapport aux tensions de phase u an , u bn et u cn respectivement. Par conséquent, l'angle de tir α est mesuré initialement à 30 ° en référence à la tension de phase qui lui correspond.
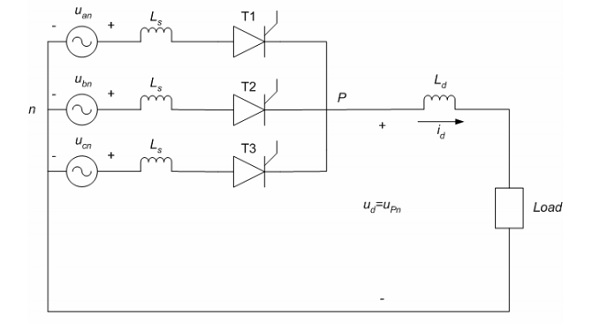
Le courant ne peut circuler que dans une seule direction à travers le thyristor, ce qui est similaire au mode de fonctionnement de l'onduleur où la puissance circule du côté CC vers le côté CA. De plus, la tension dans les thyristors est contrôlée en contrôlant l'angle d'allumage. Ceci est réalisé lorsque α = 0 (possible dans un redresseur). Ainsi, le convertisseur à 3 impulsions agit comme un inverseur et un redresseur.
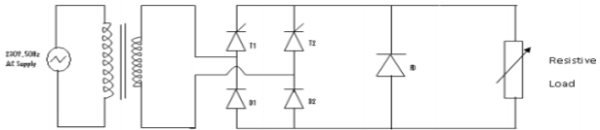
Convertisseur 6 impulsions
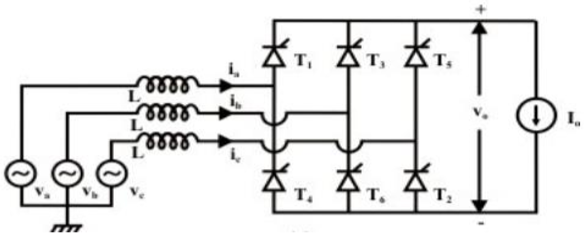
La figure ci-dessous montre un convertisseur commandé par pont à six impulsions connecté à une source triphasée. Dans ce convertisseur, le nombre d'impulsions est le double de celui des phases, c'est-à-direp = 2m. En utilisant la même configuration de convertisseur, il est possible de combiner deux ponts des six impulsions pour obtenir un convertisseur de douze impulsions ou plus.
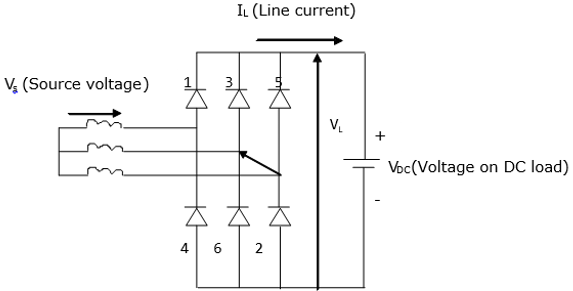
Lorsque la commutation n'est pas disponible, deux diodes conduiront à un moment donné. De plus, pour obtenir une chute de tension aux bornes de la charge, deux diodes doivent être positionnées au niveau des jambes opposées du pont. Par exemple, les diodes 3 et 6 ne peuvent pas être allumées en même temps. Par conséquent, la chute de tension aux bornes de la charge CC est une combinaison de la tension de ligne VL de la source triphasée.
Il est important de noter que plus le nombre d'impulsions est élevé, plus l'utilisation du convertisseur est grande. De plus, moins le nombre d'impulsions est faible, moins l'utilisation du convertisseur est importante.
L'analyse de la plupart des convertisseurs est généralement simplifiée dans des conditions idéales (pas d'impédance de source). Cependant, cette hypothèse n'est pas justifiée car l'impédance de la source est normalement inductive avec un élément résistif négligeable.
L'inductance de la source a un impact significatif sur les performances du convertisseur car sa présence modifie la tension de sortie du convertisseur. En conséquence, la tension de sortie diminue à mesure que le courant de charge diminue. De plus, les formes d'onde du courant d'entrée et de la tension de sortie changent considérablement.
L'effet de l'inductance de la source sur un convertisseur est analysé des deux manières suivantes.
Effet sur monophasé
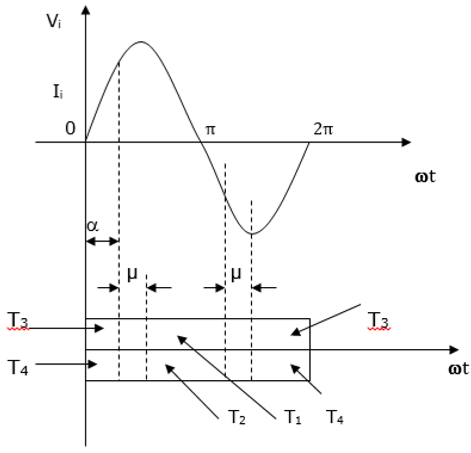
En supposant que le convertisseur fonctionne en mode conduction et que l'ondulation du courant de charge est négligeable, la tension en circuit ouvert devient égale à la sortie CC moyenne à un angle d'allumage de α Le schéma ci-dessous montre un convertisseur entièrement contrôlé avec une source en monophasé. Les thyristors T 3 et T 4 sont supposés être en conduction lorsque t = 0. En revanche, T 1 et T 2 se déclenchent lorsque ωt = α

Où -
- V i = tension d'entrée
- I i = courant d'entrée
- V o = tension de sortie
- I o = tension de sortie
Lorsqu'il n'y a pas d'inductance source, la commutation se produit à T 3 et T 4 . Immédiatement, les thyristors T 1 et T 2 sont activés. Cela amènera la polarité d'entrée à changer instantanément. En présence d'une inductance de source, le changement de polarité et la commutation ne se produisent pas instantanément. Ainsi, T 3 et T 4 ne commutent pas dès que T 1 et T 2 sont activés.
À un certain intervalle, les quatre thyristors seront conducteurs. Cet intervalle conducteur est appelé intervalle de recouvrement (μ).
Le chevauchement lors de la commutation réduit la tension de sortie continue et l'angle d'extinction y entraînant un échec de la commutation lorsque α est proche de 180 °. Ceci est illustré par la forme d'onde ci-dessous.
Effet sur triphasé
Tout comme le convertisseur monophasé, il n'y a pas de commutations instantanées du fait de la présence des inductances de source. En tenant compte des inductances de source, les effets (qualitatifs) sur les performances du convertisseur sont les mêmes que dans un convertisseur monophasé. Ceci est illustré dans le diagramme ci-dessous.
Il est important de déterminer les paramètres de performance pour différents convertisseurs dont les topologies peuvent être monophasées ou multiphasées.
Hypothèses
- Les appareils utilisés sont idéaux, c'est-à-dire qu'ils ne présentent aucune perte
- Les appareils ont des charges résistives
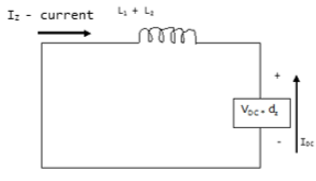
Tension CC en charge
$$V_{DC}=\frac{1}{T} \int_{0}^{T}V_{L}\left ( t \right )dt$$Tension RMS en charge
$$V_{L}=\sqrt{\frac{1}{T}}\int_{0}^{T}V_{L}^{2}\left ( t \right )dt$$Facteur de forme
$$FF=\frac{V_{L}}{V_{DC}}$$Facteur d'ondulation
$$RF=\frac{\sqrt{V_{L}^{2}-V_{DC}^{2}}}{V_{DC}}=\sqrt{FF^{2}-1}$$Efficacité (facteur de rectification)
$$\eta =\frac{P_{DC}}{P_{L}+P_{D}}$$Où les éléments ci-dessus sont définis comme -
$P_{DC}=V_{DC}\times I_{DC}$
$P_{L}=V_{L}\times I_{L}$
$P_{D}=R_{D}\times I_{L}^{2}$($P_{D}$ sont les pertes du redresseur et $R_{D}$ la résistance)
$$\eta =\frac{V_{DC}I_{DC}}{\left ( V_{L}I_{L} \right )+\left ( R_{D}I_{L}^{2} \right )}=\frac{V_{DC}^{2}}{V_{L}^{2}}\times \frac{1}{1+\frac{R_{D}}{R_{L}}}$$Mais $R_{D}=0$
Par conséquent,
$$\eta =\left ( \frac{V_{DC}}{V_{L}} \right )^{2}=\left ( \frac{1}{FF}\right )^{2}$$Facteur d'utilisation du transformateur
$$TUF=\frac{P_{DC}}{VA \:Rating \:of \:the \:Transformer }=\frac{P_{DC}}{\frac{VA_{p}+VA_{s}}{2}}$$VA p et VA s sont les puissances nominales primaire et secondaire du transformateur.
Dans les convertisseurs de courant continu haute tension (HVDC), les stations sont commutées par ligne. Cela implique que le courant initial de la vanne ne peut être retardé en référence qu'à une valeur nulle de la tension du bus du convertisseur sous forme alternative. Par conséquent, pour un meilleur contrôle de la tension, le bus convertisseur est connecté à une source de puissance réactive.
Les sources d'énergie réactive sont utilisées pour faire varier les condensateurs dans les systèmes statiques. La réponse du système de puissance réactive est dictée par le contrôle de la tension dans des conditions dynamiques.
Lors de l'utilisation de systèmes CA instables, des problèmes ont tendance à survenir en raison d'une tension instable et de surtensions. Une meilleure coordination des sources de puissance réactive est nécessaire pour simplifier le contrôle des angles de tir. En conséquence, cette caractéristique du convertisseur de puissance réactive est de plus en plus appliquée dans les convertisseurs modernes utilisant HVDC.
Contrôle de la puissance réactive en état stable
Les équations exprimant la puissance réactive en fonction de la puissance active sont données en quantités unitaires.
La tension de base du convertisseur est donnée par -
$$V_{db}=3\sqrt{\frac{2}{\pi }}\times V_{L}$$Où VL = Tension ligne à ligne (côté enroulement)
Base DC Current (Idb ) = Courant DC nominal (Idr)
Base DC Power (Pdc)= n b × V db × I db , oùnb = nombre de ponts en série
BaseBase AC voltage (Vb) = (Va)
Base AC Power = Alimentation CC de base
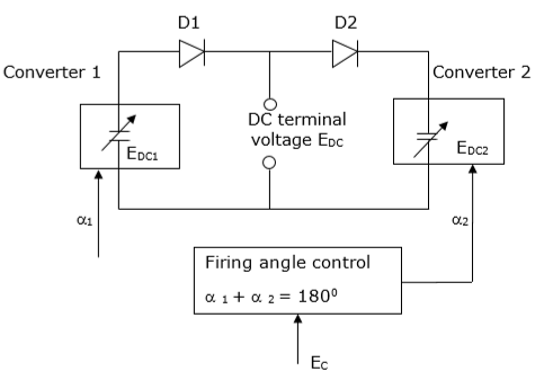
$$\sqrt{\frac{18}{\pi }}\times V_{a}\times I_{db}\times n_{b}$$Les doubles convertisseurs se trouvent principalement dans les variateurs de vitesse (VFD). Dans un double convertisseur, deux convertisseurs sont reliés l'un à l'autre. Le fonctionnement d'un double convertisseur est expliqué à l'aide du schéma ci-dessous. On suppose que -
Un double convertisseur est idéal (donne une sortie CC pure) à ses bornes.
Chaque convertisseur à deux quadrants est une source CC contrôlée en série avec une diode.
Les diodes D1 et D2 montrent le flux unidirectionnel du courant.
Considérant un double convertisseur fonctionnant sans courant de circulation, le courant alternatif est interdit de circuler par des impulsions de déclenchement contrôlées. Cela garantit que le convertisseur transportant le courant de charge est conducteur tandis que l'autre convertisseur est bloqué. Cela signifie qu'un réacteur entre les convertisseurs n'est pas nécessaire.
Chargeur de batterie
Un chargeur de batterie également connu sous le nom de chargeur utilise le courant électrique pour stocker de l'énergie dans une cellule secondaire. Le processus de charge est déterminé par le type et la taille de la batterie. Différents types de batteries ont différents niveaux de tolérance à la surcharge. Le processus de recharge peut être réalisé en le connectant à une tension constante ou à une source de courant constant.
Taux de charge (C)
Le taux de charge est défini comme le taux de charge ou de décharge d'une batterie et est égal à la capacité de la batterie en une heure.
Un chargeur de batterie est spécifié en fonction de son taux de charge C. Par exemple, un chargeur de batterie avec une note de C / 10 donnerait une capacité de charge en 10 heures tandis qu'un chargeur de 3C chargerait une batterie en 20 minutes.
Types de chargeurs de batterie
Il existe de nombreux types de chargeurs de batterie. Dans ce didacticiel, nous examinerons les cinq types principaux.
Simple chargers - Fonctionne en fournissant une source d'alimentation CC constante à la batterie en cours de charge.
Fast chargers - Utilise des circuits de commande pour charger rapidement la batterie et, ce faisant, empêcher les cellules de la batterie de s'endommager.
Inductive chargers - Utilise l'induction électromagnétique pour charger la batterie.
Intelligent chargers - Utilisé pour charger une batterie contenant une puce qui communique avec the chargeur intelligent.
Motion powered charger- Utilise le mouvement humain pour charger une batterie. Un aimant placé entre deux ressorts est déplacé de haut en bas par le mouvement humain, chargeant ainsi la batterie.
Un moteur à courant continu excité séparément a les paramètres suivants: 220V, 100A et 1450 tr / min. Son armature a une résistance de 0,1 Ω. De plus, il est alimenté par un convertisseur triphasé entièrement contrôlé connecté à une source CA triphasée avec une fréquence de 50 Hz et une réactance inductive de 0,5 Ω et 50 Hz. À α = 0, le fonctionnement du moteur est au couple et à la vitesse nominaux. Supposons que le moteur freine de manière régénérative en utilisant la direction inverse à sa vitesse nominale. Calculez le courant maximum sous lequel la commutation n'est pas affectée.
Solution -
Nous savons que,
$$V_{db}=3\sqrt{\frac{2}{\pi }}\times V_{L}-\frac{3}{\pi }\times R_{b}\times I_{db}$$En substituant les valeurs, nous obtenons,
$220=3\sqrt{\frac{2}{\pi }}\times V_{L}-\frac{3}{\pi }\times 0.5\times 100$
Par conséquent,
$V_{L}=198V$
Tension à vitesse nominale = $220-\left ( 100\times 0.1 \right )=210V$
A la vitesse nominale, le freinage régénératif en sens inverse,
$=3\sqrt{\frac{2}{\pi }}\times 198\cos \alpha -\left ( \frac{3}{\pi }\times 0.5+0.1\right )\times I_{db}=-210V$
Mais $\cos \alpha -\cos \left ( \mu +\alpha \right )=\frac{\sqrt{2}}{198}\times 0.5I_{db}$
Pour que la commutation échoue, la condition limite suivante doit être satisfaite.
$\mu +\alpha \approx 180^{\circ}$
Par conséquent, $\quad \cos \alpha =\frac{I_{db}}{198\sqrt{2}}-1$
Également,
$\frac{3}{\pi }I_{db}-\frac{3\sqrt{2}}{\pi }\times 198-\left ( \frac{3}{\pi }\times 0.5+0.1 \right )I_{db}=-210$
Cela donne, $\quad 0.3771I_{db}=57.4$
Par conséquent, $\quad I_{db}=152.2A$
Un hacheur utilise une vitesse élevée pour se connecter et se déconnecter d'une charge source. Une tension continue fixe est appliquée par intermittence à la charge source en déclenchant en continu l'interrupteur d'alimentation ON / OFF. La période de temps pendant laquelle l'interrupteur d'alimentation reste sur ON ou OFF est appelée les temps d'état ON et OFF du hacheur, respectivement.
Les hacheurs sont principalement utilisés dans les voitures électriques, la conversion de l'énergie éolienne et solaire et les régulateurs de moteur à courant continu.
Symbole d'un hachoir
Classification des hachoirs
En fonction de la tension de sortie, les hacheurs sont classés comme -
- Step Up Chopper (convertisseur boost)
- Step Down Chopper (convertisseur Buck)
- Step Up / Down Chopper (convertisseur Buck-Boost)
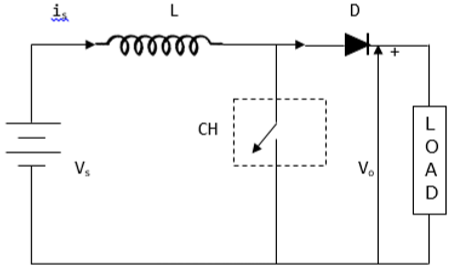
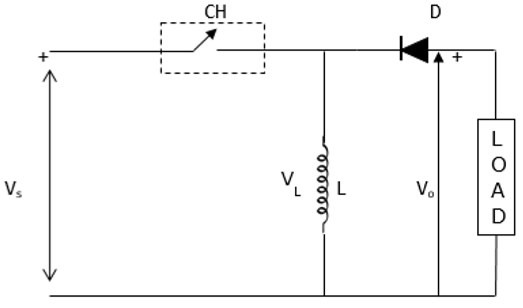
Step Up Chopper
La sortie de tension moyenne (V o ) dans un hacheur élévateur est supérieure à l'entrée de tension (V s ). La figure ci-dessous montre une configuration d'un hacheur élévateur.
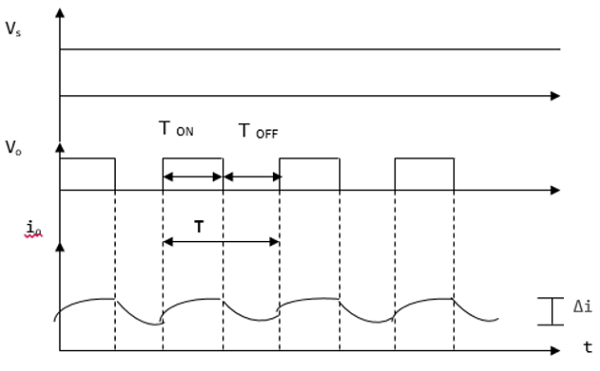
Formes d'onde de courant et de tension
V 0 (sortie de tension moyenne) est positif lorsque le hacheur est activé et négatif lorsque le hacheur est désactivé, comme indiqué dans la forme d'onde ci-dessous.
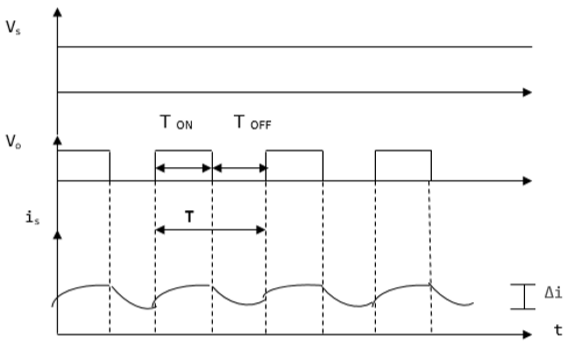
Où
T ON - intervalle de temps lorsque le hacheur est activé
T OFF - intervalle de temps lorsque le hacheur est OFF
V L - Tension de charge
V s - Tension de source
T - Période de coupe = T ON + T OFF
V o est donné par -
$$V_{0}=\frac{1}{T}\int_{0}^{T_{ON}}V_{S}dt$$Lorsque le hacheur (CH) est allumé, la charge est court-circuitée et, par conséquent, la tension de sortie pour la période TONest zéro. De plus, l'inducteur est chargé pendant ce temps. Cela donne V S = V L
$L\frac{di}{dt}=V_{S},$ $\frac{\Delta i}{T_{ON}}=\frac{V_{S}}{L}$
Par conséquent,$\Delta i=\frac{V_{S}}{L}T_{ON}$
Δi = est le courant crête à crête de l'inductance. Lorsque le hacheur (CH) est OFF, la décharge se produit à travers l'inducteur L. Par conséquent, la sommation des V s et V L est donnée comme suit -
$V_{0}=V_{S}+V_{L},\quad V_{L}=V_{0}-V_{S}$
Mais $L\frac{di}{dt}=V_{0}-V_{S}$
Donc,$L\frac{\Delta i}{T_{OFF}}=V_{0}-V_{S}$
Cela donne,$\Delta i=\frac{V_{0}-V_{S}}{L}T_{OFF}$
L'équivalence de Δi de l'état ON à Δi de l'état OFF donne -
$\frac{V_{S}}{L}T_{ON}=\frac{V_{0}-V_{S}}{L}T_{OFF}$, $V_{S}\left ( T_{ON}+T_{OFF} \right )=V_{0}T_{OFF}$
$V_{0}=\frac{TV_{S}}{T_{OFF}}=\frac{V_{S}}{\frac{\left ( T+T_{ON} \right )}{T}}$
Cela donne la sortie de tension moyenne comme,
$$V_{0}=\frac{V_{S}}{1-D}$$L'équation ci-dessus montre que V o peut varier de V S à l'infini. Cela prouve que la tension de sortie sera toujours supérieure à la tension d'entrée et, par conséquent, augmente ou augmente le niveau de tension.
Descendre le hachoir
Ceci est également connu sous le nom de convertisseur buck. Dans ce broyeur, la sortie de tension moyenne V O est inférieure à la tension d'entrée V S . Lorsque le hacheur est activé, V O = V S et lorsque le hacheur est désactivé, V O = 0
Lorsque le hacheur est en marche -
$V_{S}=\left ( V_{L}+V_{0} \right ),\quad V_{L}=V_{S}-V_{0},\quad L\frac{di}{dt}=V_{S}-V_{0},\quad L\frac{\Delta i}{T_{ON}}=V_{s}+V_{0}$
Ainsi, la charge de courant crête à crête est donnée par,
$\Delta i=\frac{V_{s}-V_{0}}{L}T_{ON}$
Schéma
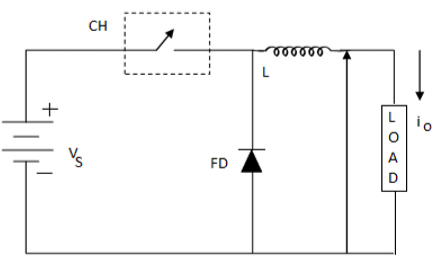
Où FD est une diode de roue libre.
Lorsque le hacheur est désactivé, une inversion de polarité et une décharge se produisent au niveau de l'inducteur. Le courant passe à travers la diode de roue libre et l'inductance vers la charge. Cela donne,
$$L\frac{di}{dt}=V_{0}........................................\left ( i \right )$$Réécrit comme -$\quad L\frac{\Delta i}{T_{OFF}}=V_{0}$ $$\Delta i=V_{0}\frac{T_{OFF}}{L}...................................\left ( ii \right )$$
L'équation des équations (i) et (ii) donne;
$\frac{V_{S}-V_{0}}{L}T_{ON}=\frac{V_{0}}{L}T_{OFF}$
$\frac{V_{S}-V_{0}}{V_{0}}=\frac{T_{OFF}}{T_{ON}}$
$\frac{V_{S}}{V_{0}}=\frac{T_{ON}-T_{OFF}}{T_{ON}}$
L'équation ci-dessus donne;
$$V_{0}=\frac{T_{ON}}{T}V_{S}=DV_{S}$$L'équation (i) donne -
$\Delta i=\frac{V_{S}-DV_{S}}{L}DT$, de $D=\frac{T_{ON}}{T}$
$=\frac{V_{S}-\left ( 1-D \right )D}{Lf}$
$f=\frac{1}{T}=$fréquence de découpage
Formes d'onde de courant et de tension
Les formes d'onde de courant et de tension sont données ci-dessous -
Pour un hacheur abaisseur, la tension de sortie est toujours inférieure à l'entrée de tension. Ceci est illustré par la forme d'onde ci-dessous.
Hachoir Step Up / Step Down
Ceci est également connu sous le nom de convertisseur buck-boost. Il permet d'augmenter ou de réduire le niveau d'entrée de tension. Le diagramme ci-dessous montre un hacheur buck-boost.
Lorsque le hacheur est mis en marche, l'inductance L se charge par la tension source V s . Par conséquent, V s = V L .
$$L\frac{di}{dt}=V_{S}$$ $$\Delta i=\frac{V_{S}}{L}T_{ON}=\frac{V_{S}}{L}T\frac{T_{ON}}{T}=\frac{DV_{S}}{Lf}$$Parce que -
$D=\frac{T_{ON}}{T}$ et $f=\frac{1}{T} .............................................. \left ( iii \right )$
Lorsque le hacheur est éteint, la polarité de l'inducteur s'inverse et cela provoque sa décharge à travers la diode et la charge.
Par conséquent,
$$V_{0}=-V_{L}$$ $$L\frac{di}{dt}=-V_{0}$$$L\frac{\Delta i}{T_{OFF}}=-V_{0}$, Donc $\Delta i=-\frac{V_{0}}{L}T_{OFF}................................\left ( iv \right )$
L'évaluation des équations (iii) et (iv) donne -
$\frac{DV_{S}}{Lf}=-\frac{V_{0}}{L}T_{OFF}$, $DV_{S}=-DV_{S}=-V_{0}T_{OFF}f$
$DV_{S}=-V_{0}\frac{T-T_{ON}}{T}=-V_{0}\left ( 1-\frac{T_{ON}}{T} \right )$, $V_{0}=-\frac{DV_{S}}{1-D}$
Car $D=\frac{T_{ON}}{T}=\frac{T-T_{OFF}}{1-D}$
Cela donne,
$V_{0}=\frac{DV_{S}}{1-D}$
D peut varier de 0 à 1. Lorsque, D = 0; V O = 0
Lorsque D = 0,5, V O = V S
Quand, D = 1, V O = ∞.
Par conséquent, dans l'intervalle 0 ≤ D ≤ 0,5, la tension de sortie varie dans la plage 0 ≤ V O <V S et nous obtenons un fonctionnement par étapes ou Buck. Alors que, dans l'intervalle 0,5 ≤ D ≤ 1, la tension de sortie varie dans la plage V S ≤ V O ≤ ∞ et nous obtenons un fonctionnement intensif ou Boost.
Dans un convertisseur, il existe deux méthodes de contrôle de base utilisées pour faire varier la tension de sortie. Ce sont -
- Contrôle du rapport de temps
- Contrôle de limite de courant
Contrôle du rapport de temps
Dans le contrôle du rapport de temps, une constante k donnée par $\frac{T_{ON}}{T}$est varié. La constante k est appelée rapport cyclique. Le contrôle du rapport de temps peut être réalisé de deux manières -
Fréquence constante
Dans ce procédé de commande, la fréquence (f = 1 / T 0N ) est maintenue constante tandis que le temps ON T est modifié. Ceci est appelé modulation de largeur d'impulsion (PWM).
Fréquence variable
Dans la technique à fréquence variable, la fréquence (f = 1 / T) est modifiée tandis que le temps ON T est maintenu constant. Ceci est appelé la commande de modulation de fréquence.
Contrôle de limite de courant
Dans un convertisseur DC-DC, la valeur du courant varie entre le niveau maximum et minimum pour une tension continue. Dans cette technique, le hacheur (interrupteur dans un convertisseur CC-CC) est activé puis désactivé pour garantir que le courant est maintenu constant entre les limites supérieure et inférieure. Lorsque le courant dépasse le point maximum, le hacheur s'éteint.
Pendant que l'interrupteur est à son état OFF, le courant des roues libres via la diode diminue de manière exponentielle. Le hacheur est mis en marche lorsque le courant atteint le niveau minimum. Cette méthode peut être utilisée soit lorsque le temps ON T est constant, soit lorsque la fréquence (f = 1 / T).
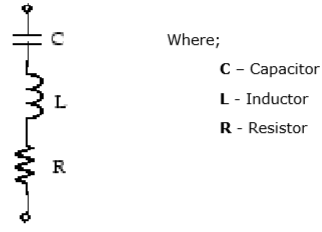
Les convertisseurs de commutation résonnants font référence aux convertisseurs qui ont des réseaux d'inductances et de condensateurs (LC) et dont les formes d'onde de courant et de tension varient de manière sinusoïdale au cours de chaque période de commutation. Il existe différents convertisseurs de commutation résonnants -
- Convertisseurs CC-CC résonants
- Onduleurs DC à AC
- Onduleurs CA résonants en convertisseurs CC
Dans ce tutoriel, nous nous concentrerons sur les convertisseurs Resonant DC en DC
Convertisseurs CC-CC résonnants
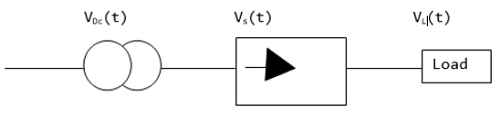
Le concept d'alimentation à découpage (SMPS) est expliqué ci-dessous à l'aide d'un convertisseur CC-CC. La charge reçoit une alimentation en tension constante (V OUT ) qui est obtenue à partir d'une source primaire d'alimentation en tension V IN . La valeur de V OUT est régulée en faisant varier la résistance en série (R S ) ou la source de courant connectée en shunt ( I S ). En contrôlant V OUT en faisant varier I S et en s'assurant que R S est maintenu constant, une quantité considérable d'énergie est perdue dans le convertisseur.

Alimentation à découpage (SMPS)
Un SMPS (alimentation à découpage) fait référence à un appareil électronique qui utilise un régulateur de commutation dans le but de convertir l'énergie électrique de manière efficace. SMPS prend l'alimentation des lignes électriques principales et la transfère à une charge. Par exemple, un ordinateur tout en s'assurant que les caractéristiques de tension et de courant sont converties.
La différence entre un SMPS et une alimentation linéaire est que le premier continue à s'allumer et à s'éteindre pendant une faible dissipation et utilise moins de temps dans les régions à forte dissipation. Cela garantit que moins d'énergie est gaspillée. En fait, un SMPS ne dissipe aucune puissance.
La taille d'un SMPS est plus petite et très légère, comparée à un dispositif d'alimentation linéaire normal de même taille et forme.
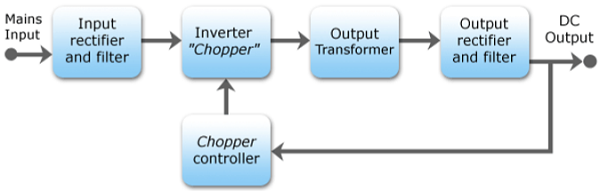
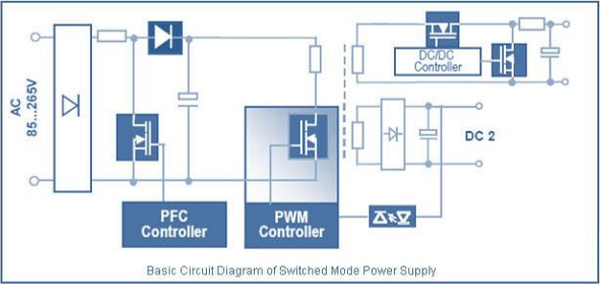
La figure ci-dessous montre le schéma de circuit d'un SMPS. Lorsque la fréquence de commutation est modifiée, l'énergie stockée peut être modifiée pour chaque cycle et donc la tension de sortie est modifiée.
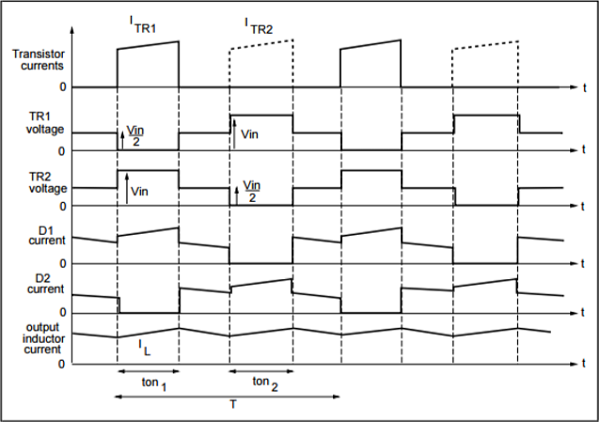
Les formes d'onde ci-dessous sont pour un convertisseur demi-pont également connu sous le nom de push-pull. Il est utilisé dans les applications utilisant une puissance élevée. La tension d'entrée est divisée par deux comme indiqué dans la forme d'onde.
Un hacheur élévateur a une tension d'entrée de 150 V. La tension de sortie nécessaire est de 450V. Étant donné que le thyristor a un temps de conduction de 150 μs. Calculez la fréquence de découpage.
Solution −
The chopping frequency (f)
$f=\frac{1}{T}$
Où T - Période de coupe = $T_{ON}+T_{OFF}$
Donné - $V_{S}=150V$$V_{0}=450V$ $T_{ON}=150\mu sec$
$V_{0}=V_{S\left ( \frac{T}{T-T_{ON}} \right )}$
$450=150\frac{T}{T-150^{-6}}$ $T=225\mu sec$
Par conséquent, $f=\frac{1}{225\ast 10^{-6}}=4.44KHz$
The new voltage output, on condition that the operation is at constant frequency after the halving the pulse width.
La réduction de moitié de la largeur d'impulsion donne -
$$T_{ON}=\frac{150\times 10^{-6}}{2}=75\mu sec$$La fréquence est donc constante,
$$f=4.44KHz$$ $$T=\frac{1}{f}=150\mu sec$$La tension de sortie est donnée par -
$$V_{0}=V_{S}\left ( \frac{T}{T-T_{ON}} \right )=150\times \left ( \frac{150\times 10^{-6}}{\left ( 150-75 \right )\times 10^{-6}} \right )=300Volts$$Un onduleur fait référence à un dispositif électronique de puissance qui convertit la puissance sous forme CC en forme CA à la fréquence et à la tension de sortie requises.
Les onduleurs sont classés en deux catégories principales -
Voltage Source Inverter (VSI) - L'onduleur de source de tension a une tension de source CC rigide, c'est-à-dire que la tension CC a une impédance limitée ou nulle aux bornes d'entrée de l'onduleur.
Current Source Inverter (CSI)- Un onduleur de source de courant est alimenté en courant variable à partir d'une source DC à haute impédance. Les ondes de courant résultantes ne sont pas influencées par la charge.
Onduleur monophasé
Il existe deux types d'onduleurs monophasés: l'onduleur à pont complet et l'onduleur à demi-pont.
Onduleur demi-pont
Ce type d'onduleur est la pierre angulaire d'un onduleur à pont complet. Il contient deux interrupteurs et chacun de ses condensateurs a une tension de sortie égale à$\frac{V_{dc}}{2}$. De plus, les interrupteurs se complètent, c'est-à-dire que si l'un est activé, l'autre s'éteint.
Onduleur à pont complet
Ce circuit inverseur convertit le courant continu en courant alternatif. Pour ce faire, il ferme et ouvre les interrupteurs dans le bon ordre. Il a quatre états de fonctionnement différents basés sur les commutateurs fermés.
Onduleur triphasé
Un onduleur triphasé convertit une entrée CC en une sortie CA triphasée. Ses trois bras sont normalement retardés d'un angle de 120 ° pour générer une alimentation triphasée en courant alternatif. Les commutateurs de l'onduleur ont chacun un rapport de 50% et la commutation se produit après chaque T / 6 du temps T (intervalle d'angle de 60 °). Les commutateurs S1 et S4, les commutateurs S2 et S5 et les commutateurs S3 et S6 se complètent.
La figure ci-dessous montre un circuit pour un onduleur triphasé. Ce ne sont que trois onduleurs monophasés placés sur la même source CC. Les tensions de pôle dans un onduleur triphasé sont égales aux tensions de pôle dans un onduleur à demi-pont monophasé.

Les deux types d'onduleurs ci-dessus ont deux modes de conduction - 180° mode of conduction et 120° mode of conduction.
Mode de conduction à 180 °
Dans ce mode de conduction, chaque appareil est en état de conduction à 180 ° où ils sont allumés à intervalles de 60 °. Les bornes A, B et C sont les bornes de sortie du pont qui sont connectées à la connexion triphasée en triangle ou en étoile de la charge.
Le fonctionnement d'une charge connectée en étoile équilibrée est expliqué dans le schéma ci-dessous. Pour la période 0 ° - 60 ° les points S1, S5 et S6 sont en mode conduction. Les bornes A et C de la charge sont connectées à la source en son point positif. La borne B est connectée à la source à son point négatif. De plus, les résistances R / 2 sont entre le neutre et l'extrémité positive tandis que la résistance R est entre le neutre et la borne négative.
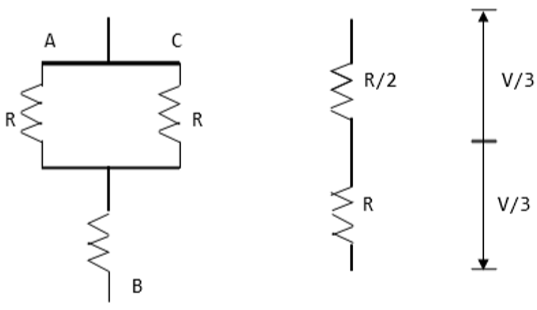
| Les tensions de charge sont données comme suit; V AN = V / 3, V BN = −2V / 3, V CN = V / 3 |
Les tensions de ligne sont données comme suit; V AB = V AN - V BN = V, V BC = V BN - V CN = −V, V CA = V CN - V AN = 0 |
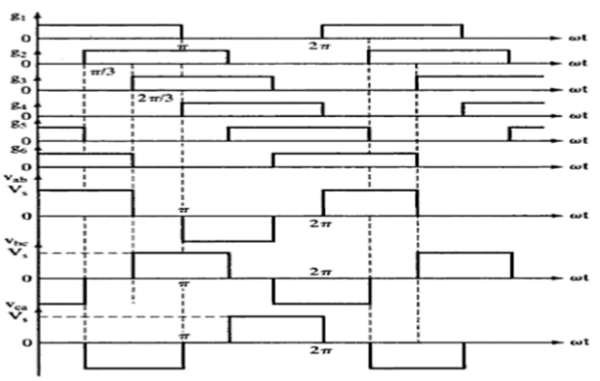
Formes d'onde pour un mode de conduction à 180 °
Mode de conduction 120 °
Dans ce mode de conduction, chaque dispositif électronique est dans un état de conduction à 120 °. Il est le plus approprié pour une connexion en triangle dans une charge car il se traduit par un type de forme d'onde en six étapes sur n'importe laquelle de ses phases. Par conséquent, à tout instant, seuls deux appareils sont conducteurs car chaque appareil ne conduit qu'à 120 °.
La borne A sur la charge est connectée à l'extrémité positive tandis que la borne B est connectée à l'extrémité négative de la source. La borne C sur la charge est dans un état appelé état flottant. De plus, les tensions de phase sont égales aux tensions de charge comme indiqué ci-dessous.
Tensions de phase = tensions de ligne
V AB = V
V BC = −V / 2
V CA = −V / 2
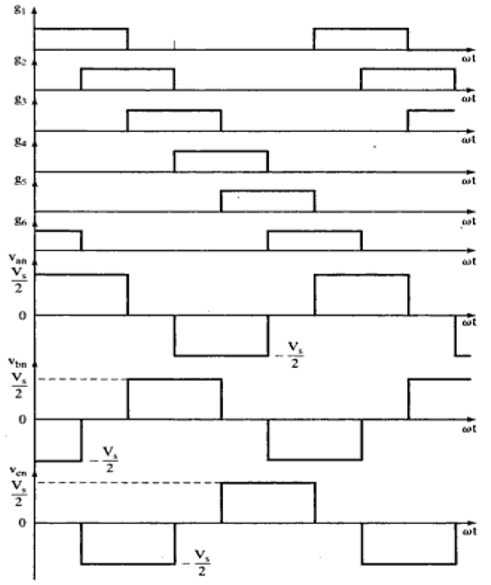
Formes d'onde pour un mode de conduction à 120 °
PWM est une technique utilisée pour réduire la distorsion harmonique globale (THD) dans un courant de charge. Il utilise une onde d'impulsion de forme rectangulaire / carrée qui se traduit par une valeur de forme d'onde moyenne variable f (t), après que sa largeur d'impulsion a été modulée. La période de modulation est donnée par T. Par conséquent, la valeur moyenne de la forme d'onde est donnée par
$$\bar{y}=\frac{1}{T}\int_{0}^{T}f\left ( t \right )dt$$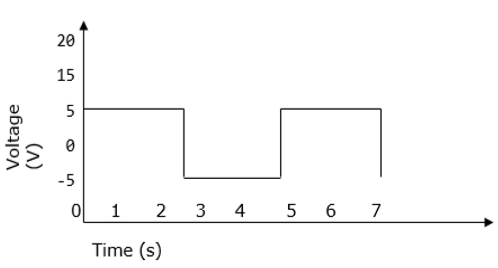
Modulation de largeur d'impulsion sinusoïdale
Dans un simple onduleur de tension source, les interrupteurs peuvent être activés et désactivés selon les besoins. Pendant chaque cycle, l'interrupteur est activé ou désactivé une fois. Il en résulte une forme d'onde carrée. Cependant, si le commutateur est activé plusieurs fois, un profil harmonique qui est une forme d'onde améliorée est obtenu.
La forme d'onde PWM sinusoïdale est obtenue en comparant la forme d'onde modulée souhaitée avec une forme d'onde triangulaire de haute fréquence. Indépendamment du fait que la tension du signal soit inférieure ou supérieure à celle de la forme d'onde porteuse, la tension de sortie résultante du bus CC est soit négative soit positive.
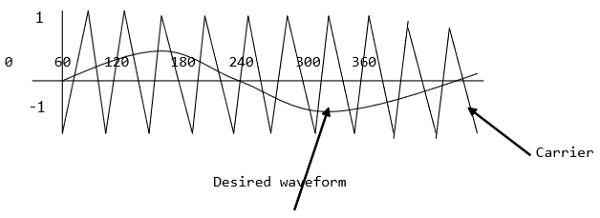
L'amplitude sinusoïdale est donnée par A m et celle du triangle porteur est donnée par A c . Pour PWM sinusoïdal, l'indice de modulation m est donné par A m / A c .
Forme d'onde sinusoïdale modifiée PWM
Une forme d'onde PWM sinusoïdale modifiée est utilisée pour le contrôle de puissance et l'optimisation du facteur de puissance. Le concept principal est de déplacer le courant retardé sur le réseau vers le réseau de tension en modifiant le convertisseur PWM. Par conséquent, il y a une amélioration de l'efficacité de la puissance ainsi qu'une optimisation du facteur de puissance.
PWM multiple
Le PWM multiple a de nombreuses sorties qui n'ont pas la même valeur mais la période de temps sur laquelle elles sont produites est constante pour toutes les sorties. Les onduleurs avec PWM peuvent fonctionner à une sortie haute tension.

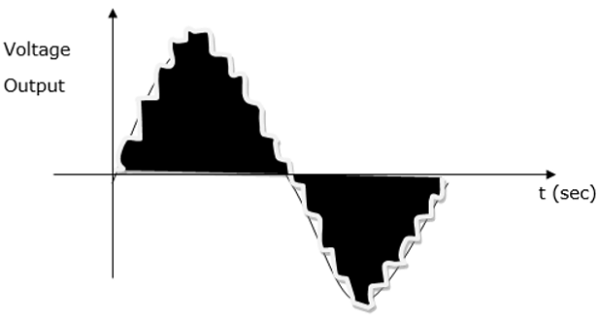
La forme d'onde ci-dessous est une onde sinusoïdale produite par un PWM multiple
Contrôle de la tension et des harmoniques
Une forme d'onde périodique qui a une fréquence, qui est une intégrale multiple de la puissance fondamentale avec une fréquence de 60 Hz, est appelée harmonique. La distorsion harmonique totale (THD) se réfère à la contribution totale de toutes les fréquences de courant harmonique.
Les harmoniques sont caractérisées par l'impulsion qui représente le nombre de redresseurs utilisés dans un circuit donné. Il est calculé comme suit -
$$h=\left ( n\times P \right )+1 \quad or \quad -1$$Où n - est un entier 1, 2, 3, 4… .n
P - Nombre de redresseurs
Il est résumé dans le tableau ci-dessous -
Harmonic |
Frequency |
| 1er | 60 Hz |
| 2 ème | 120 Hz |
| 3 ème | 180 Hz |
| 4 ème | 240 Hz |
| 5e . . 49e |
300 Hz . . 2940Hz |
Les harmoniques ont un impact sur la tension et le courant de sortie et peuvent être réduites à l'aide de transformateurs d'isolement, de réacteurs de ligne, de la refonte des systèmes d'alimentation et des filtres harmoniques.
Onduleur résonnant série
Un onduleur résonant est un onduleur électrique dont le fonctionnement est basé sur l'oscillation du courant résonnant. Ici, le dispositif de commutation et le composant résonnant sont connectés en série l'un à l'autre. En raison des caractéristiques naturelles du circuit, le courant traversant le dispositif de commutation tombe à zéro.
Ce type d'onduleur produit une forme d'onde sinusoïdale à des fréquences très élevées dans la plage de 20 kHz à 100 kHz. Il convient donc parfaitement aux applications qui nécessitent une puissance fixe comme le chauffage par induction et l'éclairage fluorescent. Il est généralement de petite taille car sa fréquence de commutation est élevée.
Un onduleur résonnant a de nombreuses configurations et est donc classé en deux groupes -
- Ceux avec des commutateurs unidirectionnels
- Ceux avec des commutateurs bidirectionnels
Un onduleur à demi-pont monophasé a une résistance de 2,5 Ω et une tension d'entrée CC de 50 V. Calculez ce qui suit -
Solution -
a. The RMS voltage occurring at the fundamental frequency
$E_{1RMS}=0.9\times 50V=45V$
b. The power Output
Tension de sortie RMS $E_{ORMS}=E=50V$
Puissance de sortie $=E^{2}/R=\left ( 50\right )^{2}/2.5=1000W$
c. Peak current and average current
Courant de pointe $I_{p}=E_{0}/R=50/2.5=20A$
Courant moyen$=I_{p}/2=20/2=10A$
d. Harmonic RMS voltage
$E_{n}=\left \{ \left ( E_{ORMS} \right )^{2}-\left ( E_{1RMS} \right )^{2} \right \}^{0.5}=\left [ 50^{2} -45^{2}\right ]^{0.5}=21.8V$
e. Total harmonic distortion
$E_{n}/E_{1RMS}=21.8/45=0.48\times 100\%=48\%$
Un contrôleur CA monophasé (contrôleur de tension) est utilisé pour faire varier la valeur de la tension alternative après qu'elle a été appliquée à un circuit de charge. Un thyristor est également placé entre la charge et la source constante de tension alternative.
La tension alternative quadratique moyenne est régulée en modifiant l'angle de déclenchement du thyristor. Dans le cas de la commande de phase, les thyristors sont utilisés comme interrupteurs pour établir une connexion entre l'alimentation d'entrée CA et le circuit de charge pendant chaque cycle d'entrée. Pour chaque tension d'entrée positive, un hachage se produit et la tension est réduite.
Schéma de circuit avec une charge résistive
Pendant la moitié du cycle, le commutateur à thyristor est activé pour permettre à l'entrée de tension d'apparaître à travers la charge. Ceci est suivi de l'état OFF pendant le dernier demi-cycle afin de déconnecter la charge de la tension source.
Lorsque l'angle de déclenchement α est contrôlé, la valeur RMS de la tension sur la charge est également contrôlée. L'angle de déclenchement α est donc défini comme la valeur deωt à laquelle le thyristor se met en marche.
Contrôle de séquence à plusieurs étages du convertisseur CA
Lorsque deux ou plusieurs étages de contrôle de séquence sont connectés, il est possible d'avoir une amélioration du facteur de puissance et une réduction supplémentaire du THD (distorsion harmonique totale). Un convertisseur de commande de séquence à n étages a n enroulements dans la partie secondaire du transformateur avec chaque e s / n évalué (la tension de source).
Lorsque deux convertisseurs CA sont placés parallèlement l'un à l'autre, la voie homopolaire est créée. Une petite différence entre les deux convertisseurs provoque une grande séquence zéro dans le courant de circulation. Le schéma ci-dessous montre le système parallèle d'un convertisseur. Le sens du courant est anti-horaire par rapport à celui du système de tension.
Un cycloconvertisseur fait référence à un changeur de fréquence qui peut changer le courant alternatif d'une fréquence en courant alternatif à une autre fréquence. Ce processus est connu sous le nom de conversion AC-AC. Il est principalement utilisé dans la traction électrique, les moteurs à courant alternatif à vitesse variable et le chauffage par induction.
Un cycloconvertisseur peut réaliser une conversion de fréquence en un seul étage et garantit que la tension et les fréquences sont contrôlables. De plus, la nécessité d'utiliser des circuits de commutation n'est pas nécessaire car elle utilise une commutation naturelle. Le transfert de puissance au sein d'un cycloconvertisseur se produit dans deux directions (bidirectionnelles).
Un problème majeur avec les cycloconvertisseurs est que lorsqu'ils fonctionnent à de faibles courants, il y a des inefficacités créées avec le retard d'allumage. En outre, les opérations ne sont lisses qu'à des fréquences qui ne sont pas égales à des valeurs d'entrée de demi-fréquence. Cela est vrai car un cycloconvertisseur est un convertisseur AC-AC contrôlé en phase. Par conséquent, pour qu'il donne la tension de sortie alternative requise, il doit effectuer une sélection des segments d'entrée de tension en appliquant une commutation de ligne (naturelle). Ceci explique pourquoi la fréquence de sortie est inférieure à la fréquence d'entrée.
Les harmoniques dans un cycloconvertisseur sont principalement affectées par les méthodes de contrôle, l'effet de chevauchement, le nombre d'impulsions dans un cycle donné, le mode de fonctionnement et le mode de conduction.
Il existe deux types de cycloconvertisseurs -
Step Up cycloconverter - Ces types utilisent une commutation naturelle et donnent une sortie à une fréquence plus élevée que celle de l'entrée.
Step Down cycloconverter - Ce type utilise une commutation forcée et aboutit à une sortie avec une fréquence inférieure à celle de l'entrée.
Les cycloconvertisseurs sont en outre classés en trois catégories -
Single phase to single-phase- Ce type de cycloconvertisseur dispose de deux convertisseurs pleine onde connectés dos à dos. Si un convertisseur fonctionne, l'autre est désactivé, aucun courant ne le traverse.
Three-phase to single-phase - Ce cycloconvertisseur fonctionne en quatre quadrants soit (+ V, + I) et (−V, −I) étant les modes de redressement et (+ V, −I) et (−V, + I) étant les modes d'inversion.
Three-phase to three-phase - Ce type de cycloconvertisseur est principalement utilisé dans les systèmes de machines à courant alternatif qui fonctionnent sur des machines triphasées à induction et synchrones.
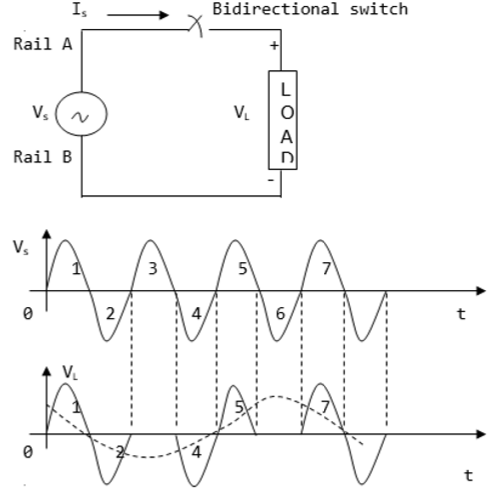
Les contrôleurs de cycle intégrés sont des convertisseurs capables d'effectuer une commutation directe sans pertes. Le processus convertit directement le courant alternatif en courant alternatif sans avoir à effectuer les processus intermédiaires de courant alternatif en courant continu puis de courant continu en courant alternatif.
Le cycle de contrôle intégral de base est de nature sinusoïdale. Il fonctionne en combinant et en éliminant les demi-cycles de fréquence plus élevée de l'entrée CA. Les contrôleurs sont normalement activés ou désactivés pendant les demi-cycles où l'entrée de tension est à zéro puisque seuls les cycles complets ou les demi-cycles sont utilisés. Par conséquent, les circuits à cycle intégral réalisent une commutation à une tension nulle sans nécessiter de circuit résonnant.
Le schéma ci-dessous montre un simple contrôleur de cycle intégral. Il contient une charge et un interrupteur d'alimentation, qui effectue la conversion directe. Ce diagramme montre la conversion de la fréquence source d'un facteur de trois à un.
Contrôle du facteur de puissance
Le contrôle du facteur de puissance, également connu sous le nom de correction du facteur de puissance, est le processus de réduction de la quantité de puissance réactive. Le dispositif électronique de puissance utilisé dans ce cas est appelé un contrôleur de facteur de puissance (PFC). A partir du triangle de puissance (qui comprend la puissance réactive, vraie et apparente), la puissance réactive est à angle droit (90 °) par rapport à la puissance vraie et est utilisée pour alimenter le champ magnétique. Bien que la puissance réactive n'ait pas de valeur réelle dans les équipements électroniques, la facture d'électricité comprend les coûts réels et réactifs. Cela rend nécessaire d'avoir des contrôleurs de facteur de puissance dans les appareils électroniques.
Le facteur de puissance (k) est défini comme le rapport de la puissance réelle (en kW) à la puissance réactive (en kVAr). Sa valeur varie de 0 à 1. Si un appareil a un facteur de puissance de 0,8 et plus, on dit qu'il utilise l'énergie efficacement. L'intégration d'un PFC garantit que le facteur de puissance varie de 0,95 à 0,99. Les contrôleurs de facteur de puissance sont principalement dans les équipements industriels pour minimiser la puissance réactive générée par l'éclairage fluorescent et les moteurs électriques.
Pour garantir une amélioration du facteur de puissance sans provoquer de distorsion harmonique, les condensateurs conventionnels ne doivent pas être utilisés. Au lieu de cela, des filtres (combinaison de condensateurs et de réacteurs) pour la suppression des harmoniques sont utilisés. La figure ci-dessous montre un filtre harmonique.
Le type de filtre harmonique ci-dessus est appelé filtre accordé unique. Un facteur de qualité Q de ce filtre est défini comme un facteur de qualité de sa réactance (X L ) à Q (fréquence d'accord) où Q est donné par (nX L / R).
Un convertisseur matriciel est défini comme un convertisseur à un seul étage de conversion. Il utilise un commutateur contrôlé bidirectionnel pour obtenir une conversion automatique de l'alimentation CA en CA. Il offre une alternative au redresseur de tension PWM (double face).
Les convertisseurs matriciels sont caractérisés par des formes d'onde sinusoïdales qui montrent les fréquences de commutation d'entrée et de sortie. Les commutateurs bidirectionnels permettent d'avoir une entrée de facteur de puissance contrôlable. De plus, l'absence de liaisons CC lui confère une conception compacte. L'inconvénient des convertisseurs matriciels est qu'ils ne disposent pas de commutateurs bilatéraux entièrement contrôlés et capables de fonctionner à des fréquences élevées. Son rapport de tension de sortie à la tension d'entrée est limité.
Il existe trois méthodes de contrôle du convertisseur matriciel -
- Modulation vectorielle spatiale
- Modulation de largeur d'impulsion
- Venturi - analyse du transfert de fonction
Le circuit du convertisseur matriciel
Le schéma ci-dessous montre un convertisseur matriciel monophasé.

Il contient quatre commutateurs bidirectionnels, chaque commutateur ayant la capacité de conduire à la fois en tension de blocage avant et en tension inverse.
Modulation vectorielle spatiale (SVM)
SVM fait référence à une méthode d'algorithme utilisée pour contrôler le PWM. Il crée des formes d'onde CA qui entraînent des moteurs CA à différentes vitesses. Dans le cas d'un onduleur triphasé alimenté en courant continu, ses trois pattes principales en sortie sont reliées à un moteur triphasé.
Les commutateurs sont sous contrôle pour garantir qu'aucun commutateur dans la même jambe ne soit activé en même temps. Des états ON simultanés peuvent entraîner un court-circuit de l'alimentation CC. Cela conduit à huit vecteurs de commutation où deux valent zéro et six sont des vecteurs actifs pour la commutation.
Un convertisseur de tension alternative monophasé présente les détails suivants:
Temps ON = 6 min, temps OFF = 4 min, fréquence = 50Hz, et
Source de tension V o = 110 V
Calculez ce qui suit.
Angle de déclenchement α
Solution -
$T=2\times \left ( T_{ON}+T_{OFF} \right )$ mais $f=50Hz,$ $T=2\times \left ( 6+4 \right )=20mins$
$360^{\circ}=20min,$ $1min=18^{\circ}$
Par conséquent, $T_{OFF}=4min$
Ensuite,
$$\alpha =\frac{4}{0.1}\times 1.8=72^{\circ}$$Sortie de tension
Solution -
$$V_{0}=\left ( V_{S}\times D \right ),\quad where \quad D=\frac{T_{ON}}{T_{ON}+T_{OFF}}=\frac{6}{10}=0.6$$ $$T_{ON}=6min,\quad T_{OFF}=4 min,\quad V_{S}=110V$$ $$V_{0}\left ( Voltage Output \right )=V_{S}\times D=110\times 0.6=66Volts$$