Ikhtisar Generator Basis Waktu
Setelah membahas dasar-dasar rangkaian pulsa, sekarang mari kita membahas berbagai rangkaian yang menghasilkan dan menangani Saw tooth waves. Gelombang gigi gergaji meningkat secara linier seiring waktu dan memiliki penurunan mendadak. Ini juga disebut sebagaiTime base signal. Sebenarnya, ini adalah keluaran ideal dari generator basis waktu.
Apa itu Generator Basis Waktu?
Generator elektronik yang menghasilkan file high frequency saw tooth waves bisa disebut sebagai a Time Base Generator. Ini juga dapat dipahami sebagai rangkaian elektronik yang menghasilkan tegangan keluaran atau bentuk gelombang arus, sebagian darinyavaries linearly with time. Kecepatan horizontal generator basis waktu harus konstan.
Untuk menampilkan variasi sinyal sehubungan dengan waktu pada osiloskop, tegangan yang bervariasi secara linier dengan waktu, harus diterapkan pada pelat defleksi. Ini membuat sinyal untuk menyapu sinar secara horizontal melintasi layar. Oleh karena itu tegangan disebut sebagaiSweep Voltage. Generator Basis Waktu disebut sebagaiSweep Circuits.
Fitur dari Sinyal Basis Waktu
Untuk menghasilkan bentuk gelombang basis waktu dalam CRO atau tabung gambar, tegangan defleksi meningkat secara linier dengan waktu. Umumnya, generator basis waktu digunakan di mana berkas membelokkan layar secara linier dan kembali ke titik awalnya. Ini terjadi selama prosesScanning. Sebuah tabung sinar katoda dan juga tabung gambar bekerja dengan prinsip yang sama. Sinar membelokkan layar dari satu sisi ke sisi lain (umumnya dari kiri ke kanan) dan kembali ke titik yang sama.
Fenomena ini disebut sebagai Trace dan Retrace. Lendutan balok di atas layar dari kiri ke kanan disebut sebagaiTrace, sedangkan kembalinya balok dari kanan ke kiri disebut sebagai Retrace atau Fly back. Biasanya penelusuran ulang ini tidak terlihat. Proses ini dilakukan dengan bantuan generator gelombang gigi gergaji yang mengatur jangka waktu defleksi dengan bantuan komponen RC yang digunakan.
Mari kita coba memahami bagian-bagian gelombang gigi gergaji.

Dalam sinyal di atas, waktu selama output meningkat secara linier disebut sebagai Sweep Time (TS) dan waktu yang dibutuhkan sinyal untuk kembali ke nilai awalnya disebut sebagai Restoration Time atau Fly back Time atau Retrace Time (Tr). Kedua periode waktu ini bersama-sama membentuk periode waktu dari satu siklus sinyal basis waktu.
Sebenarnya, bentuk gelombang tegangan Sweep yang kita dapatkan ini adalah keluaran praktis dari rangkaian sapuan sedangkan keluaran yang ideal adalah bentuk gelombang gigi gergaji yang ditunjukkan pada gambar di atas.
Jenis Generator basis waktu
Ada dua jenis Generator basis waktu. Mereka adalah -
Voltage Time Base Generators - Generator basis waktu yang menyediakan bentuk gelombang tegangan keluaran yang bervariasi secara linier dengan waktu disebut sebagai Generator basis Waktu Tegangan.
Current Time Base Generator - Generator basis waktu yang menyediakan bentuk gelombang arus keluaran yang bervariasi secara linier dengan waktu disebut sebagai Generator basis Waktu Saat Ini.
Aplikasi
Generator Basis Waktu digunakan di CRO, televisi, tampilan RADAR, sistem pengukuran waktu yang tepat, dan modulasi waktu.
Kesalahan Sinyal Sapu
Setelah menghasilkan sinyal sapuan, sekarang saatnya untuk mengirimkannya. Sinyal yang ditransmisikan dapat mengalami penyimpangan dari linieritas. Untuk memahami dan memperbaiki kesalahan yang terjadi, kita harus memiliki pengetahuan tentang kesalahan umum yang terjadi.
Penyimpangan dari linieritas diekspresikan dalam tiga cara berbeda. Mereka adalah -
- Kesalahan Kemiringan atau Kecepatan Sapuan
- Kesalahan Perpindahan
- Kesalahan Transmisi
Mari kita bahas secara rinci.
Lereng atau Sapu Kecepatan Kesalahan (e s )
Tegangan sapuan harus meningkat secara linier seiring waktu. Laju perubahan tegangan sapuan dengan waktu harus konstan. Penyimpangan dari linieritas ini didefinisikan sebagaiSlope Speed Error atau Sweep Speed Error.
Kemiringan atau Kecepatan Sapuan eror e s = $ \ frac {perbedaan \: dalam \: kemiringan \: di \: the \: awal \: dan \: akhir \: dari \: sapuan} {awal \: nilai \: dari \ : slope} $
$$ = \ frac {\ kiri (\ frac {\ mathrm {d} V_0} {\ mathrm {d} t} \ kanan) _ {t = 0} - \ kiri (\ frac {\ mathrm {d} V_0} {\ mathrm {d} t} \ right) _ {t = T_s}} {\ left (\ frac {\ mathrm {d} V_0} {\ mathrm {d} t} \ right) _ {t = 0}} $$
Kesalahan Perpindahan (e d )
Kriteria penting linieritas adalah perbedaan maksimum antara tegangan sapuan aktual dan sapuan linier yang melewati titik awal dan akhir sapuan aktual.
Hal tersebut dapat dipahami dari gambar berikut.
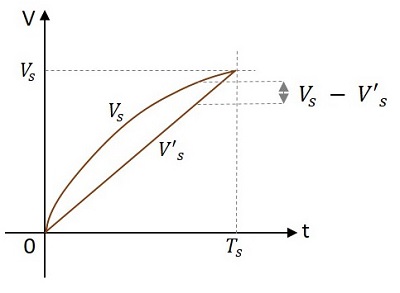
Kesalahan perpindahan ed didefinisikan sebagai
e d = $ \ frac {(aktual \: kecepatan) \ thicksim (linier \: sapuan \: bahwa \: melewati \: awal \: dan \: akhir \: dari \: aktual \: sapuan)} {amplitudo \: dari \: sapuan \: di \: akhir \: akhir \: dari \: sapuan \: waktu} $
$$ = \: \ frac {(V_s - V′_s) _ {max}} {V_s} $$
Di mana V s adalah menyapu aktual dan V' s adalah sapuan linear.
Kesalahan Transmisi (e t )
Ketika sinyal sapuan melewati rangkaian high pass, output menyimpang dari input seperti yang ditunjukkan di bawah ini.
Penyimpangan ini dinyatakan sebagai kesalahan transmisi.
Kesalahan Transmisi = $ \ frac {(input) \: \ thicksim \ :( output)} {input \: at \: the \: end \: of \: the \: sweep} $
$$ e_t = \ frac {V′_s - V} {V′_s} $$
Di mana V' s adalah input dan V s adalah output pada akhir sapuan yaitu pada t = T s .
Jika penyimpangan dari linieritas sangat kecil dan tegangan sapuan dapat didekati dengan jumlah suku linier dan kuadrat dalam t, maka tiga kesalahan di atas terkait sebagai
$$ e_d = \ frac {e_s} {8} = \ frac {e_t} {4} $$
$$ e_s = 2e_t = 8e_d $$
Kesalahan kecepatan sapuan lebih dominan daripada kesalahan perpindahan.