AI-エージェントと環境
AIシステムは、エージェントとその環境で構成されています。エージェントは自分の環境で行動します。環境には他のエージェントが含まれている可能性があります。
エージェントと環境とは何ですか?
アン agent を通してその環境を知覚できるものは何でも sensors を通じてその環境に作用します effectors.
A human agent センサーと平行に目、耳、鼻、舌、皮膚などの感覚器官と、エフェクター用の手、脚、口などの他の器官があります。
A robotic agent センサー用のカメラと赤外線距離計、およびエフェクター用のさまざまなモーターとアクチュエーターに取って代わります。
A software agent プログラムおよびアクションとしてビット文字列をエンコードしました。

エージェントの用語
Performance Measure of Agent −エージェントがどれだけ成功するかを決定する基準です。
Behavior of Agent −これは、エージェントが特定の一連の知覚の後に実行するアクションです。
Percept −特定のインスタンスでのエージェントの知覚入力です。
Percept Sequence −エージェントがこれまでに認識してきたすべての歴史です。
Agent Function −これは、プリセプトシーケンスからアクションへのマップです。
合理性
合理性とは、合理的で、賢明で、判断力のある状態に他なりません。
合理性は、エージェントが何を認識したかに応じて、期待されるアクションと結果に関係します。有用な情報を得るために行動を起こすことは、合理性の重要な部分です。
理想的な合理的エージェントとは何ですか?
理想的な合理的エージェントは、以下に基づいて、パフォーマンス測定値を最大化するために期待されるアクションを実行できるエージェントです。
- その知覚シーケンス
- 組み込みのナレッジベース
エージェントの合理性は以下に依存します-
ザ・ performance measures、成功の度合いを決定します。
エージェントの Percept Sequence 今まで。
エージェントの prior knowledge about the environment。
ザ・ actions エージェントが実行できること。
合理的エージェントは常に正しい行動を実行します。正しい行動とは、与えられた知覚シーケンスでエージェントを最も成功させる行動を意味します。エージェントが解決する問題は、パフォーマンス測定、環境、アクチュエータ、およびセンサー(PEAS)によって特徴付けられます。
知的エージェントの構造
エージェントの構造は次のように見ることができます-
- エージェント=アーキテクチャ+エージェントプログラム
- アーキテクチャ=エージェントが実行する機械。
- エージェントプログラム=エージェント機能の実装。
単純な反射エージェント
- 彼らは現在の認識にのみ基づいて行動を選択します。
- それらは、現在の教訓に基づいてのみ正しい決定がなされた場合にのみ合理的です。
- 彼らの環境は完全に観察可能です。
Condition-Action Rule −状態(条件)をアクションにマッピングするルールです。

モデルベースの反射エージェント
彼らは世界のモデルを使用して行動を選択します。それらは内部状態を維持します。
Model −「世界で物事がどのように起こるか」についての知識。
Internal State −知覚履歴に応じた現在の状態の観察されていない側面の表現です。
Updating the state requires the information about −
- 世界がどのように進化するか。
- エージェントの行動が世界にどのように影響するか。

目標ベースのエージェント
彼らは目標を達成するために彼らの行動を選びます。意思決定をサポートする知識が明示的にモデル化され、それによって変更が可能になるため、目標ベースのアプローチは反射エージェントよりも柔軟性があります。
Goal −望ましい状況の説明です。

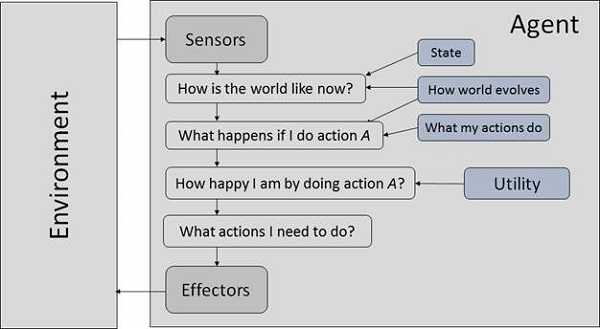
ユーティリティベースのエージェント
彼らは、各州の選好(効用)に基づいて行動を選択します。
−の場合、目標は不十分です。
相反する目標があり、そのうち達成できるのはごくわずかです。
目標には達成の不確実性があり、成功の可能性と目標の重要性を比較検討する必要があります。
環境の性質
一部のプログラムは完全に動作します artificial environment キーボード入力、データベース、コンピューターファイルシステム、および画面上の文字出力に限定されます。
対照的に、一部のソフトウェアエージェント(ソフトウェアロボットまたはソフトボット)は、リッチで無制限のソフトボットドメインに存在します。シミュレータにはvery detailed, complex environment。ソフトウェアエージェントは、多数のアクションからリアルタイムで選択する必要があります。顧客のオンライン設定をスキャンし、顧客に興味深いアイテムを表示するように設計されたソフトボットは、real だけでなく、 artificial 環境。
一番有名な artificial environment それは Turing Test environment、1つの実際のエージェントと他の人工エージェントが同じ地面でテストされます。ソフトウェアエージェントが人間と同じように実行することは非常に難しいため、これは非常に困難な環境です。
チューリングテスト
システムのインテリジェントな動作の成功は、チューリングテストで測定できます。
2人と評価対象の機械がテストに参加します。2人のうち、1人がテスターの役割を果たします。それらのそれぞれは、異なる部屋に座っています。テスターは、誰が機械で誰が人間であるかを認識していません。彼は質問を入力して両方のインテリジェンスに送信することで質問し、入力された応答を受け取ります。
このテストは、テスターをだますことを目的としています。テスターが人間の応答からマシンの応答を判断できない場合、そのマシンはインテリジェントであると言われます。
環境の特性
環境には複数の特性があります-
Discrete / Continuous−環境の明確に定義された明確な状態の数が限られている場合、環境は離散的です(たとえば、チェス)。それ以外の場合は継続的です(たとえば、運転)。
Observable / Partially Observable−知覚から各時点での環境の完全な状態を判断することが可能である場合、それは観察可能です。それ以外の場合は、部分的にしか観察できません。
Static / Dynamic−エージェントの動作中に環境が変化しない場合、環境は静的です。それ以外の場合は動的です。
Single agent / Multiple agents −環境には、エージェントと同じまたは異なる種類の他のエージェントが含まれている場合があります。
Accessible / Inaccessible −エージェントの感覚装置が環境の完全な状態にアクセスできる場合、そのエージェントは環境にアクセスできます。
Deterministic / Non-deterministic−環境の次の状態が、現在の状態とエージェントのアクションによって完全に決定される場合、環境は決定論的です。それ以外の場合は、非決定論的です。
Episodic / Non-episodic−エピソード環境では、各エピソードは、エージェントが認識して行動することで構成されます。そのアクションの質は、エピソード自体に依存します。後続のエピソードは、前のエピソードのアクションに依存しません。エージェントが先を考える必要がないため、一時的な環境ははるかに単純です。