Obwody impulsowe - skrócona instrukcja
ZA Signalnie tylko przekazuje informacje, ale także przedstawia stan obwodu. Działanie dowolnego obwodu można badać na podstawie wytwarzanego przez niego sygnału. Dlatego zaczniemy ten samouczek od krótkiego wprowadzenia do sygnałów.
Sygnał elektroniczny
Sygnał elektroniczny jest podobny do normalnego sygnału, z którym się spotykamy, który coś wskazuje lub o czymś informuje. Graficzna reprezentacja sygnału elektronicznego dostarcza informacji o okresowych zmianach parametrów, takich jak amplituda lub faza sygnału. Zawiera również informacje dotyczące napięcia, częstotliwości, okresu itp.
Ta reprezentacja nadaje pewien kształt przekazywanej informacji lub odbieranemu sygnałowi. Takiemu kształtowi sygnału, utworzonego zgodnie z pewną wariacją, można nadać różne nazwy, takie jak sygnał sinusoidalny, trójkątny, piłokształtny, prostokątny itp.
Są to głównie dwa typy sygnałów, nazywane sygnałami jednokierunkowymi i dwukierunkowymi.
Unidirectional Signal - Sygnał, gdy płynie tylko w jednym kierunku, który jest dodatni lub ujemny, taki sygnał określa się jako sygnał jednokierunkowy.
Example - Sygnał impulsowy.
Bidirectional Signal - Sygnał, gdy zmienia się w obu kierunkach dodatnich i ujemnych, przechodząc przez punkt zerowy, taki sygnał jest określany jako sygnał dwukierunkowy.
Example - Sygnał sinusoidalny.
W tym rozdziale omówimy sygnały pulsacyjne i ich charakterystykę.
Sygnał impulsowy
Kształt impulsu jest tworzony przez szybką lub nagłą przejściową zmianę z wartości bazowej na wartość wyższego lub niższego poziomu, która powraca do tej samej wartości bazowej po pewnym okresie czasu. Taki sygnał można nazwać sygnałem impulsowym.
Poniższa ilustracja przedstawia serię impulsów.

Sygnał impulsowy to sygnał jednokierunkowy, niesinusoidalny, podobny do sygnału prostokątnego, ale nie symetryczny jak fala prostokątna. Szereg ciągłych sygnałów impulsowych nazywany jest po prostu ciągiem impulsów. Ciąg impulsów wskazuje na nagły wysoki poziom i nagłe przejście niskiego poziomu z poziomu podstawowego, co można rozumieć odpowiednio jako WŁ. / WYŁ.
Stąd sygnał impulsowy wskazuje ON i OFF sygnału. Jeśli przełącznik elektryczny ma wejście impulsowe, włącza się / wyłącza zgodnie z podanym sygnałem impulsowym. Te przełączniki, które wytwarzają sygnały impulsowe, można omówić później.
Terminy związane z sygnałami impulsowymi
Istnieje kilka terminów związanych z sygnałami impulsowymi, które należy znać. Można to zrozumieć za pomocą poniższego rysunku.

Z powyższego rysunku
Pulse width - Długość impulsu
Period of a waveform - Pomiar od dowolnego punktu w jednym cyklu do tego samego punktu w następnym cyklu
Duty cycle - Stosunek szerokości impulsu do okresu
Rise time - Czas potrzebny do wzrostu z 10% do 90% maksymalnej amplitudy.
Fall time - Sygnał czasu spada z 90% do 10% maksymalnej amplitudy.
Overshoot - Mówi się, że ma to miejsce, gdy zbocze czołowe przebiegu przekracza jego normalną wartość maksymalną.
Undershoot - Mówi się, że ma to miejsce, gdy zbocze opadające przebiegu przekracza jego normalną wartość maksymalną.
Ringing - Po przeregulowaniu i przeregulowaniu następują tłumione oscylacje zwane dzwonieniem.
Oscylacje tłumione to zmiany sygnału wskazujące na malejącą amplitudę i częstotliwość sygnału, które nie są użyteczne i niepożądane. Te oscylacje są prostymi zaburzeniami zwanymiringing.
W następnym rozdziale wyjaśnimy koncepcję przełączania w elektronice za pomocą BJT. Omówiliśmy już przełączanie za pomocą diod w naszym samouczku OBWODY ELEKTRONICZNE. Proszę odnieś się.
Switch to urządzenie, które makes lub breaksobwód lub styk. Ponadto może konwertować dane analogowe na dane cyfrowe. Aby przełącznik był skuteczny, głównym wymaganiem jest szybkość i przełączanie bez iskrzenia. Podstawowe części to przełącznik i powiązany z nim obwód.
Są trzy types of Switches. Oni są -
- Przełączniki mechaniczne
- Przełączniki elektromechaniczne lub przekaźniki
- Przełączniki elektroniczne
Przełączniki mechaniczne
Przełączniki mechaniczne to przełączniki starszego typu, których używaliśmy wcześniej. Ale zostały one zastąpione przełącznikami elektromechanicznymi, a później przełącznikami elektronicznymi, także w kilku zastosowaniach, aby przezwyciężyć wady tego pierwszego.
Wady przełączników mechanicznych są następujące -
- Mają dużą bezwładność, która ogranicza prędkość działania.
- Podczas zrywania kontaktu wytwarzają iskry.
- Styki przełącznika są ciężkie, aby przenosić większe prądy.
Przełączniki mechaniczne wyglądają jak na poniższym rysunku.
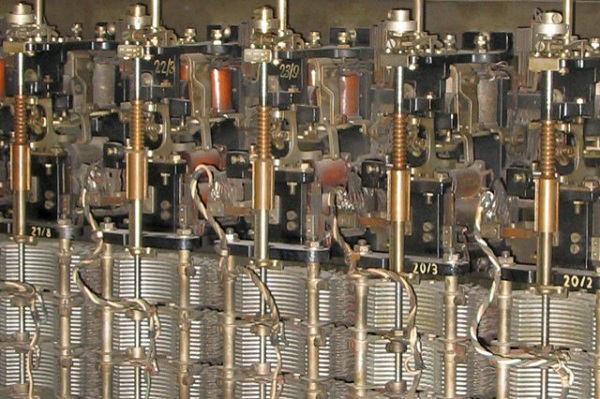
Te mechaniczne przełączniki zostały zastąpione elektromechanicznymi przełącznikami lub przekaźnikami, które mają dobrą prędkość działania i zmniejszają iskrzenie.
Przekaźniki
Przełączniki elektromechaniczne nazywane są również jako Relays. Przełączniki te są częściowo mechaniczne, a częściowo elektroniczne lub elektryczne. Są one większe niż przełączniki elektroniczne i mniejsze niż przełączniki mechaniczne.
Budowa przekaźnika
Przekaźnik jest wykonany w taki sposób, że połączenie zestyku zasila obciążenie. W obwodzie zewnętrznym mamy zasilacz obciążenia dla obciążenia oraz zasilacz cewki do sterowania pracą przekaźnika. Wewnątrz dźwignia jest połączona z jarzmem żelaznym za pomocą twardej sprężyny, która utrzymuje dźwignię w górze. Cewka elektromagnetyczna jest połączona z jarzmem z nawiniętą wokół niego cewką roboczą. Jak wspomniano, cewka ta jest połączona z zasilaniem cewki.
Poniższy rysunek wyjaśnia budowę i działanie przekaźnika.

Działanie przekaźnika
Gdy przełącznik jest zamknięty, utworzona zostaje ścieżka elektryczna, która zasila elektromagnes. Dźwignia jest połączona ciężką sprężyną, która pociąga dźwignię i przytrzymuje. Elektrozawór, gdy zostanie zasilony, pociąga dźwignię w swoim kierunku, wbrew sile naciągu sprężyny. Gdy dźwignia zostanie pociągnięta, styk ruchomy styka się ze stykiem nieruchomym w celu połączenia obwodu. W ten sposób połączenie obwodu jest WŁĄCZONE lub ustanowione, a lampka świeci, wskazując na to.
Kiedy wyłącznik jest wyłączony, solenoid nie pobiera prądu i zostaje pozbawiony napięcia. To pozostawia dźwignię bez przyciągania do solenoidu. Sprężyna pociąga dźwignię do góry, co zrywa kontakt. W ten sposób połączenie obwodu zostaje wyłączone.
Poniższy rysunek pokazuje, jak wygląda praktyczny przekaźnik.
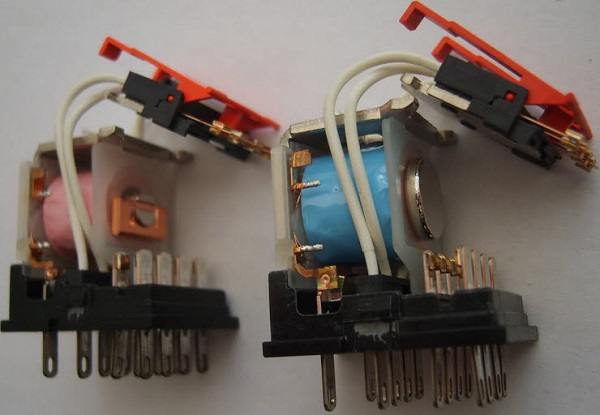
Przyjrzyjmy się teraz zaletom i wadom przełącznika elektromagnetycznego.
Zalety
- Przekaźnik zużywa mniej energii, nawet do obsługi dużej mocy przy obciążeniu.
- Operator może znajdować się w większej odległości, nawet przy wysokim napięciu.
- Brak iskrzenia podczas włączania lub wyłączania.
Niedogodności
- Powolne działanie
- Części są podatne na zużycie
Rodzaje zatrzasków w przekaźnikach
Istnieje wiele rodzajów przekaźników w zależności od ich trybu pracy, np. Przekaźnik elektromagnetyczny, przekaźnik półprzewodnikowy, przekaźnik termiczny, przekaźnik hybrydowy, kontaktron itp.
Przekaźnik łączy się za pomocą zatrzasku, jak pokazano na poniższym rysunku.

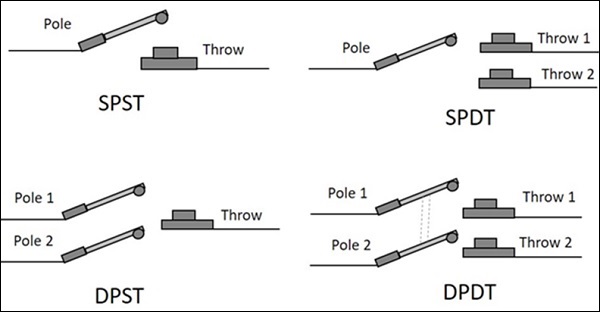
W przekaźnikach występują cztery typy połączeń zatrzaskowych. Oni są -
Single Pole Single Throw (SPST) - Ten zatrzask ma pojedynczy słupek i jest rzucany na jeden rzut, aby wykonać połączenie.
Single Pole Double Throw (SPDT)- Ten zatrzask ma pojedynczy biegun i podwójny rzut, aby wykonać połączenie. Ma do wyboru połączenie z dwoma różnymi obwodami, do których podłączono dwa rzuty.
Double Pole Single Throw (DPST)- Ten zatrzask ma podwójny biegun i pojedynczy skok, aby wykonać połączenie. Dowolny z dwóch obwodów może zdecydować, czy połączenie z obwodem będzie dostępne w jednym rzucie.
Double Pole Double Throw (DPDT) - Ten zatrzask ma podwójny biegun i jest rzucany na podwójny rzut, aby wykonać dwa połączenia w tym samym czasie.
Poniższy rysunek przedstawia schematyczny widok wszystkich czterech typów połączeń zatrzaskowych.
Przełącznik elektroniczny
Następnym rodzajem przełącznika do omówienia jest przełącznik elektroniczny. Jak wspomniano wcześniej, tranzystor jest najczęściej używanym przełącznikiem elektronicznymhigh operating speed i absence of sparking.
Poniższy obraz przedstawia praktyczny obwód elektroniczny zbudowany tak, aby tranzystor działał jako przełącznik.

Tranzystor działa jako przełącznik w stanie włączenia, gdy jest używany w obszarze nasycenia. Działa jako wyłącznik w stanie WYŁĄCZENIA, gdy działa w obszarze odcięcia. Działa jako wzmacniacz w obszarze liniowym, który leży pomiędzy tranzystorem a odcięciem. Aby mieć pojęcie o tych obszarach działania, zapoznaj się z rozdziałem poświęconym tranzystorom w samouczku BASIC ELECTRONICS.
Gdy warunki zewnętrzne są tak wytrzymałe i panują wysokie temperatury, prosty i normalny tranzystor nie wystarczy. Specjalne urządzenie o nazwieSilicon Control Rectifierpo prostu SCRjest używany do takich celów. Zostanie to szczegółowo omówione w samouczku POWER ELECTRONICS.
Zalety przełącznika elektronicznego
Istnieje wiele zalet przełącznika elektronicznego, takich jak
- Mniejszy rozmiar
- Lżejszy
- Działanie błyszczy
- Brak ruchomych części
- Mniejsza podatność na zużycie
- Cicha praca
- Szybsza obsługa
- Tańsze niż inne przełączniki
- Mniej konserwacji
- Bezproblemowa obsługa dzięki tranzystorowi
ZA transistorto prosty przełącznik elektroniczny o dużej szybkości działania. Jest to urządzenie półprzewodnikowe, a wszystkie styki są proste, dzięki czemu unika się iskrzenia podczas pracy. Etapy operacji przełączania w tranzystorze omówimy w następnym rozdziale.
ZA transistor jest używany jako przełącznik elektroniczny, wbijając go albo w saturation lub w cut off. Region między tymi dwoma jest regionem liniowym. Tranzystor działa jako wzmacniacz liniowy w tym regionie. Nasycenie i cięcieoff państwa są ważne w tym względzie.
Stany włączenia i wyłączenia tranzystora
Istnieją dwa główne obszary działania tranzystora, które możemy uznać za ON i OFFstany. Są nasycone i cięteoffstany. Przyjrzyjmy się zachowaniu tranzystora w tych dwóch stanach.
Praca w stanie odcięcia
Poniższy rysunek przedstawia tranzystor w strefie odcięcia.
Kiedy baza tranzystora jest ujemna, tranzystor przechodzi w stan odcięcia. Brak prądu kolektora. Stąd ja C = 0.
Napięcie V CC stosowane na kolektorze pojawia na rezystorze R kolektora C . W związku z tym,
V CE = V CC
Praca w rejonie nasycenia
Poniższy rysunek przedstawia tranzystor w obszarze nasycenia.

Gdy napięcie baza jest dodatnia, a tranzystor przechodzi w stan nasycenia, to C przepływa przez R C .
Wtedy V CC spadków R C . Wynik będzie równy zero.
$$I_C = I_{C(sat)} \: = \: \frac{V_{CC}}{R_C} \: and \: V_{CE} = 0$$
Właściwie to jest idealny stan. Praktycznie przepływa część prądu upływowego. Dlatego możemy zrozumieć, że tranzystor działa jak przełącznik, gdy jest wprowadzany do nasycenia i odcina regiony, przykładając dodatnie i ujemne napięcie do bazy.
Poniższy rysunek daje lepsze wyjaśnienie.
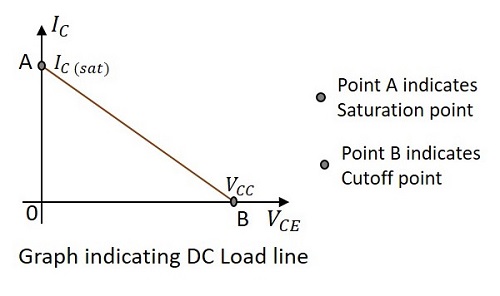
Obserwuj linię obciążenia prądu stałego, która łączy I C i V CC . Jeśli tranzystor jest doprowadzony do nasycenia, I C przepływa całkowicie i V CE = 0, co jest wskazywane przez punktA.
Jeśli tranzystor zostanie wprowadzony do odcięcia, I C będzie równe zeru, a V CE = V CC, co jest wskazane przez punkt B. linia łącząca punkt nasycenia A i odcięcie B nazywa sięLoad line. Ponieważ przyłożone tutaj napięcie to DC, nazywa się je asDC Load line.
Względy praktyczne
Chociaż powyższe warunki są przekonujące, istnieje kilka praktycznych ograniczeń, aby takie wyniki wystąpiły.
W stanie odcięcia
Idealny tranzystor ma V CE = V CC i I C = 0.
Ale w praktyce przez kolektor przepływa mniejszy prąd upływu.
Stąd I C będzie wynosić kilka μA.
Nazywa się to Collector Leakage Current co jest oczywiście pomijalne.
W stanie nasycenia
Idealny tranzystor ma V CE = 0 i I C = I C (sat) .
Ale w praktyce V CE spada do pewnej wartości zwanejknee voltage.
Kiedy V CE spada bardziej niż napięcie kolana, β gwałtownie spada.
Ponieważ I C = βI B zmniejsza to prąd kolektora.
Stąd ten maksymalny prąd I C, który utrzymuje V CE przy napięciu kolana, jest znany jakoSaturation Collector Current.
Prąd kolektora nasycenia = $I_{C(sat)} \: = \: \frac{V_{CC} - V_{knee}}{R_C}$
Tranzystor, który jest wytwarzany tylko po to, aby działał do celów przełączania, nazywa się Switching Transistor. Działa to w obszarze nasycenia lub odcięcia. W stanie nasyceniacollector saturation current przepływa przez ładunek iw stanie odcięcia, collector leakage current przepływa przez ładunek.
Przełączanie działania tranzystora
Tranzystor ma trzy obszary działania. Aby zrozumieć efektywność działania, należy wziąć pod uwagę praktyczne straty. Spróbujmy więc zorientować się, jak skutecznie tranzystor działa jako przełącznik.
W stanie odcięcia (OFF)
Prąd bazy I B = 0
Prąd kolektora I C = I CEO (prąd kolektora)
Strata mocy = napięcie wyjściowe × prąd wyjściowy
$$= V_{CC} \times I_{CEO}$$
Ponieważ I CEO jest bardzo mały, a V CC jest również niskie, strata będzie miała bardzo małą wartość. W związku z tym tranzystor działa jako wydajny przełącznik w stanie wyłączonym.
W stanie nasycenia (ON)
Jak wspomniano wcześniej,
$$I_{C(sat)} = \frac{V_{CC} - V_{knee}}{R_C}$$
Napięcie wyjściowe to Vknee.
Strata mocy = napięcie wyjściowe × prąd wyjściowy
$$= \:V_{knee} \times I_{c(sat)}$$
Ponieważ kolano V będzie miało niewielką wartość, strata jest niewielka. W związku z tym tranzystor działa jako wydajny przełącznik w stanie włączenia.
Podczas aktywnego regionu
Tranzystor znajduje się między stanami ON i OFF. Tranzystor działa jako wzmacniacz liniowy, w którym małe zmiany prądu wejściowego powodują duże zmiany prądu wyjściowego (ΔI C ).
Czasy przełączania
Tranzystor przełączający ma impuls jako wejście, a wyjściem będzie impuls z kilkoma zmianami. Jest kilka terminów, które powinieneś znać w odniesieniu do czasów przełączania impulsu wyjściowego. Przejdźmy przez nie.
Niech czas trwania impulsu wejściowego = T
Po przyłożeniu impulsu wejściowego prąd kolektora potrzebuje trochę czasu, aby osiągnąć wartość stanu ustalonego, ze względu na błądzące pojemności. Poniższy rysunek wyjaśnia tę koncepcję.

Z powyższego rysunku
Time delay(td) - Czas, w którym prąd kolektora osiąga od wartości początkowej do 10% wartości końcowej, nazywa się Time Delay.
Rise time(tr) - Czas, w którym prąd kolektora osiągnie od 10% wartości początkowej do 90% wartości końcowej, nazywany jest Rise Time.
Turn-on time (TON)- Suma czasu opóźnienia (t d ) i czasu narastania (t r ) jest nazywana jakoTurn-on time.
T ON = t d + t r
Storage time (ts) - Odstęp czasu między końcowym zboczem impulsu wejściowego a 90% maksymalnej wartości wyjścia nazywany jest Storage time.
Fall time (tf) - Czas, w którym prąd kolektora osiąga od 90% jego maksymalnej wartości do 10% jego wartości początkowej, nazywany jest Fall Time.
Turn-off time (TOFF)- Suma czasu przechowywania (t s ) i czasu opadania (t f ) jest zdefiniowana jakoTurn-off time.
T WYŁ = t s + t f
Pulse Width(W) - Czas trwania impulsu wyjściowego mierzony między dwoma 50% poziomami narastania i opadania fali jest zdefiniowany jako Pulse Width.
ZA multivibrator obwód to nic innego jak switching circuit. Generuje fale niesinusoidalne, takie jak fale prostokątne, prostokątne i piłokształtne itp. Multiwibratory są używane jako generatory częstotliwości, dzielniki częstotliwości i generatory opóźnień czasowych, a także jako elementy pamięci w komputerach itp.
Tranzystor w zasadzie działa jako wzmacniacz w swoim liniowym obszarze. Jeżeli stopień wyjściowy wzmacniacza tranzystorowego jest połączony z poprzednim stopniem wzmacniacza, to takie połączenie nazywa się sprzężone. Jeśli rezystor jest używany do sprzęgania dwóch stopni takiego obwodu wzmacniacza, nazywa się goResistance coupled amplifier. Więcej informacji można znaleźć w samouczku WZMACNIACZE.
Co to jest multiwibrator?
Zgodnie z definicją multiwibrator jest dwustopniowym wzmacniaczem sprzężonym oporowo z dodatnim sprzężeniem zwrotnym z wyjścia jednego wzmacniacza do wejścia drugiego .
Dwa tranzystory są połączone w sprzężeniu zwrotnym, tak że jeden kontroluje stan drugiego. Stąd stany załączenia i wyłączenia całego obwodu oraz okresy, w których tranzystory są doprowadzane do nasycenia lub odcięcia, są kontrolowane przez warunki obwodu.
Poniższy rysunek przedstawia schemat blokowy multiwibratora.

Rodzaje multiwibratorów
Istnieją dwa możliwe stany multiwibratora. W pierwszym etapie tranzystor Q 1 włącza się, podczas gdy tranzystor Q 2 wyłącza się. W drugim etapie tranzystor Q 1 wyłącza się, podczas gdy tranzystor Q 2 włącza się. Te dwa stany są zamieniane na pewne okresy czasu w zależności od warunków obwodu.
W zależności od sposobu, w jaki te dwa stany są wymieniane, multiwibratory są podzielone na trzy typy. Oni są
Astable Multivibrator
Astable Multivibrator to taki obwód automatically switchesmiędzy dwoma stanami w sposób ciągły, bez stosowania zewnętrznego impulsu do jego działania. Ponieważ daje to ciągłe wyjście fali prostokątnej, nazywa się to aFree-running Multivibrator. Źródło zasilania prądu stałego jest powszechnym wymaganiem.
Czas trwania tych stanów zależy od stałych czasowych użytych komponentów. Ponieważ multiwibrator ciągle się przełącza, stany te są znane jako stany quasi-stabilne lub półstabilne. Stąd sątwo quasi-stable states dla Astable Multivibrator.
Monostabilny multiwibrator
Monostabilny multiwibrator ma a stable state i a quasi-stable state. Ma wejście wyzwalające do jednego tranzystora. Tak więc jeden tranzystor automatycznie zmienia swój stan, podczas gdy drugi potrzebuje wejścia wyzwalającego, aby zmienić swój stan.
Ponieważ ten multiwibrator wytwarza pojedyncze wyjście dla każdego impulsu wyzwalającego, jest to znane jako One-shot Multivibrator. Ten multiwibrator nie może pozostawać w stanie quasi-stabilnym przez dłuższy czas, podczas gdy pozostaje w stanie stabilnym, dopóki nie zostanie odebrany impuls wyzwalający.
Bistabilny multiwibrator
Bistabilny multiwibrator ma zarówno two states stable. Aby zmienić stany, należy zastosować dwa impulsy wyzwalające. Dopóki nie zostanie podane wejście wyzwalające, ten multiwibrator nie może zmienić swojego stanu. Jest również znany jakoflip-flop multivibrator.
Ponieważ impuls wyzwalający ustawia lub resetuje wyjście, a niektóre dane, tj. Wysokie lub niskie są przechowywane do momentu zakłócenia, ten multiwibrator można nazwać Flip-flop. Aby dowiedzieć się więcej o klapkach, zapoznaj się z naszym samouczkiem DIGITAL CIRCUITS pod adresem:https://www.tutorialspoint.com/digital_circuits/index.htm
Aby uzyskać jasny obraz powyższej dyskusji, spójrzmy na poniższy rysunek.

Wszystkie te trzy multiwibratory są dokładnie omówione w następnych rozdziałach.
Niesamowity multiwibrator ma no stable states. Po multiwibrator jest włączona, to po prostu zmienia swoje stany na własną rękę po pewnym okresie czasu, który jest określony przez R C stałych czasowych. Do obwodu podawane jest zasilanie prądem stałym lub V cc w celu jego działania.
Budowa Astable Multivibrator
Dwa tranzystory o nazwach Q 1 i Q 2 są połączone ze sobą sprzężeniem zwrotnym. Kolektor tranzystora Q 1 jest połączony z bazą tranzystora Q 2 przez kondensator C 1 i vice versa. Emitery obu tranzystorów są połączone z masą. Rezystory obciążające kolektor R 1 i R 4 oraz rezystory polaryzujące R 2 i R 3 mają równe wartości. Kondensatory C 1 i C 2 mają równe wartości.
Poniższy rysunek przedstawia schemat obwodu Astable Multivibrator.

Działanie Astable Multivibrator
Przyłożenie V cc zwiększa prąd kolektora tranzystorów. Ponieważ prąd kolektora zależy od prądu podstawowego,
$$I_c = \beta I_B$$
Ponieważ nie ma podobnych charakterystyk tranzystora, jeden z dwóch tranzystorów mówi, że Q 1 ma wzrost prądu kolektora, a zatem przewodzi. Kolektor Q 1 jest nakładany na podstawę od Q 2 do C 1 . Połączenie to pozwala na przyłożenie zwiększonego ujemnego napięcia na kolektorze Q 1 do podstawy Q 2 i zmniejszenie jego prądu kolektora. To ciągłe działanie powoduje dalsze zmniejszenie prądu kolektora Q 2 . Ten prąd przyłożony do podstawy Q 1 czyni go bardziej ujemnym i wraz ze skumulowanymi działaniami Q 1 osiąga nasycenie, a Q 2 odcina się. Zatem napięcie wyjściowe Q 1 będzie równe V CE (sat), a Q 2 będzie równe V CC .
Kondensator C 1 ładuje się przez R 1 i gdy napięcie na C 1 osiągnie 0,7 V, wystarczy to, aby przekształcić tranzystor Q 2 w nasycenie. Gdy to napięcie jest przyłożone do podstawy Q 2 , dochodzi do nasycenia, zmniejszając prąd kolektora. To zmniejszenie napięcia w punkcie B jest przykładane do bazy tranzystora od Q 1 do C 2, co powoduje odwrócenie polaryzacji Q 1 . Szereg z tych działań włączyć tranzystor Q 1 w celu odcięcia i tranzystor Q 2 do nasycenia. Teraz punkt A ma potencjał V CC . Kondensator C 2 ładuje się przez R 2 . Napięcie na tym kondensatorze C 2, gdy osiągnie 0,7 V, włącza tranzystor Q 1 do nasycenia.
Stąd napięcie wyjściowe i przebieg wyjściowy są tworzone przez naprzemienne przełączanie tranzystorów Q 1 i Q 2 . Okres tych stanów ON / OFF, zależy od wartości zakłócenia rezystory i kondensatory użyte, czyli na R C wartości używanych. Ponieważ oba tranzystory pracują naprzemiennie, sygnał wyjściowy ma kształt prostokątny o szczytowej amplitudzie V CC .
Przebiegi
Na poniższych rysunkach przedstawiono przebiegi wyjściowe na kolektorach Q 1 i Q 2 .

Częstotliwość drgań
Czas załączenia tranzystora Q 1 lub czas wyłączenia tranzystora Q 2 jest określony przez
t 1 = 0,69 R 1 C 1
Podobnie, czas wyłączenia tranzystora Q 1 lub czas włączenia tranzystora Q 2 jest określony przez
t 2 = 0,69 R 2 C 2
Stąd całkowity okres czasu fali prostokątnej
t = t 1 + t 2 = 0,69 (R 1 C 1 + R 2 C 2 )
Ponieważ R 1 = R 2 = R i C 1 = C 2 = C, częstotliwość fali prostokątnej będzie wynosić
$$f = \frac{1}{t} = \frac{1}{1.38 R C} = \frac{0.7}{RC}$$
Zalety
Zalety stosowania stabilnego multiwibratora są następujące -
- Nie jest wymagane zewnętrzne wyzwalanie.
- Projekt obwodu jest prosty
- Inexpensive
- Może funkcjonować w sposób ciągły
Niedogodności
Wady stosowania stabilnego multiwibratora są następujące -
- Absorpcja energii jest bardziej w obwodzie.
- Sygnał wyjściowy ma niską energię.
- Nie można osiągnąć cyklu pracy mniejszego lub równego 50%.
Aplikacje
Astable Multivibrators są używane w wielu zastosowaniach, takich jak amatorski sprzęt radiowy, generatory kodu Morse'a, obwody timera, obwody analogowe i systemy telewizyjne.
Monostabilny multiwibrator, jak nazwa wskazuje, ma tylko one stable state. Kiedy tranzystor przewodzi, drugi pozostaje w stanie nieprzewodzenia. Stan stabilny to taki stan, w którym tranzystor pozostaje niezmieniony, chyba że zostanie zakłócony przez jakiś zewnętrzny impuls wyzwalający. Ponieważ Monostable działa na tej samej zasadzie, ma inną nazwę zwaną asOne-shot Multivibrator.
Budowa monostabilnego multiwibratora
Dwa tranzystory Q 1 i Q 2 są ze sobą sprzężone zwrotnie. Kolektor tranzystora Q 1 jest połączony z bazą tranzystora Q 2 przez kondensator C 1 . Baza Q 1 jest połączona z kolektorem Q 2 poprzez rezystor R 2 i kondensator C. Kolejne napięcie zasilania DC –V BB jest podawane do bazy tranzystora Q 1 poprzez rezystor R 3 . Impuls wyzwalający podane są w oparciu o Q 1 przez kondensator C 2 do zmiany jego stanu. R L1 i R L2 to rezystory obciążenia Q 1 i Q 2 .
Gdy jeden z tranzystorów przechodzi w stan stabilny, podawany jest zewnętrzny impuls wyzwalający, aby zmienić jego stan. Po zmianie swojego stanu tranzystor pozostaje w tym stanie quasi-stabilnym lub meta-stabilnym przez określony czas, który jest określany przez wartości stałych czasowych RC i wraca do poprzedniego stanu stabilnego.
Poniższy rysunek przedstawia schemat obwodu monostabilnego multiwibratora.

Działanie monostabilnego multiwibratora
Po pierwsze, gdy obwód jest włączony, tranzystor Q 1 będzie w stanie OFF, a Q 2 będzie w stanie ON. To jest stan stabilny. Ponieważ Q 1 jest wyłączone, napięcie kolektora będzie wynosić V CC w punkcie A, a zatem C 1 zostanie naładowany. Dodatni impuls wyzwalający przyłożony do podstawy tranzystora Q 1 włącza tranzystor. Zmniejsza to napięcie kolektora, co powoduje wyłączenie tranzystora Q 2 . Kondensator C 1 zaczyna rozładowania w tym momencie. Gdy dodatnie napięcie z kolektora tranzystora Q 2 zostanie przyłożone do tranzystora Q 1 , pozostaje ono w stanie ON. To jest stan quasi-stabilny lub stan meta-stabilny.
Tranzystor Q 2 pozostaje w stanie wyłączenia, aż do kondensatora C 1 rozładowuje się całkowicie. Następnie tranzystor Q 2 włącza się z napięciem przyłożonym przez rozładowanie kondensatora. To włącza tranzystor Q 1 , który jest poprzednim stabilnym stanem.
Przebiegi wyjściowe
Na poniższych rysunkach przedstawiono przebiegi wyjściowe na kolektorach Q 1 i Q 2 wraz z wejściem wyzwalającym podanym u podstawy Q 1 .

Szerokość tego impulsu wyjściowego zależy od stałej czasowej RC. Stąd zależy to od wartości R 1 C 1 . Czas trwania impulsu jest określony przez
$$T = 0.69R_1 C_1$$
Podane wejście wyzwalające będzie miało bardzo krótki czas trwania, tylko po to, aby zainicjować akcję. Powoduje to zmianę stanu obwodu ze stanu stabilnego na stan quasi-stabilny lub meta-stabilny lub półstabilny, w którym obwód pozostaje przez krótki czas. Na jeden impuls wyzwalający przypada jeden impuls wyjściowy.
Zalety
Zalety monostabilnego multiwibratora są następujące -
- Wystarczy jeden impuls wyzwalający.
- Projekt obwodu jest prosty
- Inexpensive
Niedogodności
Główną wadą stosowania monostabilnego multiwibratora jest to, że czas pomiędzy aplikacjami impulsu wyzwalającego T musi być większy niż stała czasowa RC obwodu.
Aplikacje
Multiwibratory monostabilne są używane w takich zastosowaniach, jak obwody telewizyjne i obwody systemów sterowania.
Bistabilny multiwibrator ma two stable states. Obwód pozostaje w jednym z dwóch stabilnych stanów. Kontynuuje w tym stanie, chyba że zostanie podany zewnętrzny impuls wyzwalający. Ten multiwibrator jest również znany jakoFlip-flop. Ten obwód nazywa się po prostu asBinary.
W multiwibratorach bistabilnych jest kilka typów. Są takie, jak pokazano na poniższym rysunku.

Budowa bistabilnego multiwibratora
Dwa podobne tranzystory Q 1 i Q 2 z rezystorami obciążenia R L1 i R L2 są połączone ze sobą sprzężeniem zwrotnym. Rezystory bazowe R 3 i R 4 są połączone ze wspólnym źródłem –V BB . Rezystory sprzężenia zwrotnego R 1 i R 2 są bocznikowane przez kondensatory C 1 i C 2 znane jakoCommutating Capacitors. Tranzystor Q 1 przedstawiono wejście wyzwalające u podstawy przez kondensator C, 3 i tranzystor Q 2 przedstawiono wejście wyzwalające u podstawy przez kondensator C 4 .
Kondensatory C 1 i C 2 są również znane jakoSpeed-up Capacitors, ponieważ zmniejszają transition time, co oznacza czas potrzebny na przeniesienie przewodzenia z jednego tranzystora do drugiego.
Poniższy rysunek przedstawia schemat obwodu samopolaryzującego się bistabilnego multiwibratora.

Działanie multiwibratora bistabilnego
Kiedy obwód jest włączony, z powodu pewnych nierównowag obwodu, jak w Astable, jeden z tranzystorów, powiedzmy Q 1, zostaje włączony, podczas gdy tranzystor Q 2 zostaje wyłączony. To jest stabilny stan bistabilnego multiwibratora.
Poprzez zastosowanie wyzwalania ujemnego na bazie tranzystora Q 1 lub przez przyłożenie dodatniego impulsu wyzwalającego do bazy tranzystora Q 2 , ten stabilny stan pozostaje niezmieniony. Rozumiemy więc to, biorąc pod uwagę ujemny impuls u podstawy tranzystora Q 1 . W rezultacie wzrasta napięcie kolektora, co powoduje polaryzację tranzystora Q 2 w przód . Prąd kolektora Q 2 przyłożony do podstawy Q 1 , odwrotnie polaryzuje Q 1 i to skumulowane działanie powoduje wyłączenie tranzystora Q 1 i włączenie tranzystora Q 2 . To kolejny stabilny stan multiwibratora.
Teraz, jeśli ten stabilny stan ma zostać ponownie zmieniony, wówczas albo ujemny impuls wyzwalający na tranzystorze Q 2, albo dodatni impuls wyzwalający na tranzystorze Q 1 jest stosowany.
Przebiegi wyjściowe
Przebiegi wyjściowe na kolektorach Q 1 i Q 2 wraz z wejściami wyzwalającymi podanymi w bazach Q W i Q 2 przedstawiono na poniższych rysunkach.

Zalety
Zalety stosowania bistabilnego multiwibratora są następujące:
- Przechowuje poprzedni wynik, chyba że zostanie zakłócony.
- Projekt obwodu jest prosty
Niedogodności
Wady bistabilnego multiwibratora są następujące:
- Wymagane są dwa rodzaje impulsów wyzwalających.
- Nieco droższe niż inne multiwibratory.
Aplikacje
Multiwibratory bistabilne są używane w zastosowaniach, takich jak generowanie impulsów i operacje cyfrowe, takie jak zliczanie i przechowywanie informacji binarnych.
Binarny o stałym odchyleniu
Obwód binarny o stałym odchyleniu jest podobny do Astable Multivibrator, ale z prostym przełącznikiem SPDT. Dwa tranzystory są połączone w sprzężeniu zwrotnym z dwoma rezystorami, przy czym jeden kolektor jest podłączony do podstawy drugiego. Poniższy rysunek przedstawia schemat obwodu binarnego o stałym odchyleniu.

Aby zrozumieć działanie, przyjmijmy, że przełącznik jest w pozycji 1. Teraz tranzystor Q 1 będzie wyłączony, gdy baza jest uziemiona. Napięcie kolektor na wyjściu zacisku V O1 będzie równa V CC , który włącza tranzystor Q 2 WŁ. Wyjście na zacisku V O2 przechodzi w stan NISKI. Jest to stabilny stan, który można zmienić tylko za pomocą zewnętrznego wyzwalacza. Zmiana przełącznika na pozycję 2 działa jak spust.
Po zmianie przełącznika baza tranzystora Q 2 jest uziemiona, przełączając go w stan OFF. Napięcie kolektora przy V O2 będzie równe V CC, które jest podawane na tranzystor Q 1, aby go włączyć. To jest drugi stan stabilny. Wyzwalanie odbywa się w tym obwodzie za pomocą przełącznika SPDT.
Istnieją dwa główne typy wyzwalania obwodów binarnych. Oni są
- Wyzwalanie symetryczne
- Asymetryczne wyzwalanie
Wyzwalacz Schmitta
Innym rodzajem obwodu binarnego, który należy omówić, jest Emitter Coupled BinaryObwód. Ten obwód jest również nazywany jakoSchmitt Triggerobwód. Ten obwód jest uważany za szczególny typ tego rodzaju w swoich zastosowaniach.
Główna różnica w konstrukcji tego układu jest to, że sprzężenie z wyjścia C 2 drugiego tranzystora B1 bazy pierwszego tranzystora i który jest brak sprzężenia uzyskuje się poprzez rezystor R e . Ten obwód jest nazywanyRegenerative circuit bo to ma positive feedback i no Phase inversion. Obwód wyzwalacza Schmitta za pomocą BJT jest pokazany poniżej.

Początkowo mamy Q 1 OFF i Q 2 ON. Napięcie przyłożone do podstawy Q 2 wynosi od V CC do R C1 i R 1 . Więc napięcie wyjściowe będzie
$$V_0 = V_{CC} - (I_{C2}R_{c2})$$
A P 2 jest włączony, nie będzie spadek napięcia na R E , który będzie (I C2 + I B2 ) R e . Teraz to napięcie zostaje przyłożone do emitera Q 1 . Napięcie wejściowe jest zwiększane i dopóki Q 1 nie osiągnie napięcia włączenia do włączenia, wyjście pozostaje NISKIE. Gdy Q 1 jest włączony, sygnał wyjściowy wzrośnie, gdy Q 2 jest również włączony. Gdy napięcie wejściowe nadal rośnie, napięcie w punktach C 1 i B 2 nadal spada, a E 2 nadal rośnie. Przy określonej wartości napięcia wejściowego Q 2 wyłącza się. Napięcie wyjściowe w tym momencie będzie wynosić V CC i pozostanie stałe, chociaż napięcie wejściowe będzie dalej zwiększane.
Gdy napięcie wejściowe rośnie, wyjście pozostaje NISKIE, aż napięcie wejściowe osiągnie V 1, gdzie
$$V_1 = [V_{CC} - (I_{C2}R_{C2})]$$
Wartość, przy której napięcie wejściowe równe V 1 , pozwala tranzystorowi Q 1 wejść w nasycenie, nazywa sięUTP(Górny punkt wyzwalania). Jeśli napięcie jest już większe niż V 1 , to pozostaje tam, aż napięcie wejściowe osiągnie V 2 , co jest przejściem niskiego poziomu. Stąd wartość, dla której napięcie wejściowe będzie wynosić V 2, przy której Q 2 przejdzie w stan ON, określa się jakoLTP (Dolny punkt wyzwalania).
Przebiegi wyjściowe
Przebiegi wyjściowe uzyskuje się, jak pokazano poniżej.

Obwód wyzwalający Schmitta działa jako Comparator i dlatego porównuje napięcie wejściowe z dwoma różnymi poziomami napięcia zwanymi jako UTP (Górny punkt wyzwalania) i LTP(Dolny punkt wyzwalania). Jeśli wejście przecina tę UTP, jest uważane za WYSOKIE, a jeśli spadnie poniżej tego LTP, jest traktowane jako NISKIE. Wyjście będzie sygnałem binarnym wskazującym 1 dla WYSOKI i 0 dla NISKIEGO. Stąd sygnał analogowy jest konwertowany na sygnał cyfrowy. Jeśli wejście ma wartość pośrednią (między WYSOKĄ a NISKĄ), wówczas wyjściem będzie poprzednia wartość.
Ta koncepcja zależy od zjawiska zwanego as Hysteresis. Charakterystyki przenoszenia obwodów elektronicznych wykazują aloop nazywany jako Hysteresis. Wyjaśnia, że wartości wyjściowe zależą zarówno od obecnych, jak i przeszłych wartości danych wejściowych. Zapobiega to niepożądanemu przełączaniu częstotliwości w obwodach wyzwalania Schmitta
Zalety
Zalety obwodu wyzwalającego Schmitta to
- Zachowane są doskonałe poziomy logiczne.
- Pomaga uniknąć meta-stabilności.
- Preferowany w stosunku do zwykłych komparatorów do kondycjonowania impulsów.
Niedogodności
Główne wady wyzwalacza Schmitta to
- Jeśli wejście jest wolne, wyjście będzie wolniejsze.
- Jeśli sygnał wejściowy jest zaszumiony, dźwięk będzie głośniejszy.
Zastosowania wyzwalacza Schmitta
Obwody wyzwalające Schmitta są używane jako komparator amplitudy i obwód prostopadły. Są również używane w obwodach kondycjonowania i ostrzenia impulsów.
To są obwody multiwibratora wykorzystujące tranzystory. Te same multiwibratory są zaprojektowane przy użyciu wzmacniaczy operacyjnych, a także obwodów czasowych IC 555, które są omówione w dalszych samouczkach.
Po omówieniu podstaw obwodów impulsowych, przejdźmy teraz do różnych obwodów, które generują i sobie z nimi radzą Saw tooth waves. Fala zęba piły narasta liniowo z upływem czasu i gwałtownie spada. Nazywa się to również jakoTime base signal. W rzeczywistości jest to idealna wydajność generatora podstawy czasu.
Co to jest generator podstawy czasu?
Generator elektroniczny, który generuje high frequency saw tooth waves można określić jako Time Base Generator. Można go również rozumieć jako obwód elektroniczny, który generuje wyjściowy przebieg napięcia lub prądu, którego częśćvaries linearly with time. Prędkość pozioma generatora podstawy czasu musi być stała.
Aby wyświetlić zmiany sygnału w czasie na oscyloskopie, do płytek odchylających należy przyłożyć napięcie zmieniające się liniowo w czasie. To sprawia, że sygnał przesuwa wiązkę poziomo po ekranie. Stąd napięcie nazywa sięSweep Voltage. Generatory podstawy czasu nazywane są jakoSweep Circuits.
Cechy sygnału podstawy czasu
Aby wygenerować przebieg o podstawie czasu w CRO lub kineskopie, napięcie odchylające rośnie liniowo w czasie. Generalnie używany jest generator podstawy czasu, w którym wiązka odchyla się liniowo po ekranie i powraca do punktu początkowego. Dzieje się tak podczas procesuScanning. Lampa elektronopromieniowa i kineskop działają na tej samej zasadzie. Wiązka odchyla się po ekranie z jednej strony na drugą (zwykle od lewej do prawej) i wraca do tego samego punktu.
Zjawisko to określa się jako Trace i Retrace. Odchylenie wiązki nad ekranem od lewej do prawej nosi nazwęTrace, podczas gdy powrót belki od prawej do lewej nazywany jest jako Retrace lub Fly back. Zwykle ten ślad nie jest widoczny. Proces ten odbywa się za pomocą generatora fali piłokształtnej, który ustala czas ugięcia przy pomocy zastosowanych elementów żelbetowych.
Spróbujmy zrozumieć części fali piłokształtnej.

W powyższym sygnale czas, w którym moc wzrasta liniowo, nazywany jest jako Sweep Time (TS) a czas potrzebny na powrót sygnału do wartości początkowej nazywany jest jako Restoration Time lub Fly back Time lub Retrace Time (Tr). Oba te okresy razem tworzą okres czasu jednego cyklu sygnału podstawy czasu.
W rzeczywistości ten przebieg napięcia przemiatania, który otrzymujemy, jest praktycznym wyjściem obwodu przemiatania, podczas gdy idealnym wyjściem musi być przebieg piły pokazany na powyższym rysunku.
Typy generatorów podstawy czasu
Istnieją dwa typy generatorów podstawy czasu. Oni są -
Voltage Time Base Generators - Generator podstawy czasu, który dostarcza przebieg napięcia wyjściowego, który zmienia się liniowo w czasie, nazywany jest generatorem podstawy czasu napięcia.
Current Time Base Generator - Generator podstawy czasu, który dostarcza przebieg prądu wyjściowego, który zmienia się liniowo w czasie, nazywany jest generatorem podstawy czasu prądu.
Aplikacje
Generatory podstawy czasu są używane w CRO, telewizorach, wyświetlaczach RADAR, precyzyjnych systemach pomiaru czasu i modulacji czasu.
Błędy sygnałów wobulacji
Po wygenerowaniu sygnałów przemiatania nadszedł czas na ich przesłanie. Przesyłany sygnał może podlegać odchyleniom od liniowości. Aby zrozumieć i poprawić występujące błędy, musimy posiadać wiedzę na temat najczęściej występujących błędów.
Odchylenie od liniowości wyraża się na trzy różne sposoby. Oni są -
- Błąd prędkości nachylenia lub przeciągnięcia
- Błąd przemieszczenia
- Błąd transmisji
Omówmy je szczegółowo.
Błąd prędkości nachylenia lub przemiatania (e s )
Napięcie przemiatania musi rosnąć liniowo w czasie. Szybkość zmian napięcia przemiatania w czasie musi być stała. To odchylenie od liniowości określa się jakoSlope Speed Error lub Sweep Speed Error.
Błąd nachylenia lub prędkości przesuwu s =$\frac{difference \: in\: slope\: at \: the\: beginning\: and\: end\: of\: sweep}{initial \: value \:of \: slope}$
$$= \frac{\left (\frac{\mathrm{d} V_0}{\mathrm{d} t} \right )_{t = 0} - \left( \frac{\mathrm{d} V_0}{\mathrm{d} t} \right)_{t = T_s}}{\left( \frac{\mathrm{d} V_0}{\mathrm{d} t}\right )_{t = 0}}$$
Błąd przemieszczenia (e d )
Ważnym kryterium liniowości jest maksymalna różnica między rzeczywistym napięciem przemiatania a liniowym przemiataniem, które przechodzi przez punkt początkowy i końcowy rzeczywistego przemiatania.
Można to zrozumieć na poniższym rysunku.
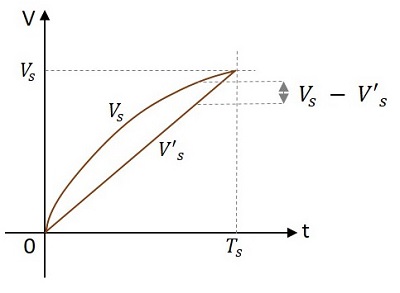
Błąd przemieszczenia ed jest zdefiniowany jako
e d =$\frac{(actual\: speed)\thicksim (linear\: sweep \: that\: passes\: beginning \: and \: ending\: of\: actual\: sweep)}{amplitude\: of\: sweep\: at\: the \: end\: of\: sweep\: time}$
$$= \: \frac{(V_s - V′_s)_{max}}{V_s}$$
Gdzie V y jest rzeczywista przemiatania i V y jest przemiatania liniowa.
Błąd transmisji (e t )
Kiedy sygnał przemiatania przechodzi przez obwód górnoprzepustowy, wyjście zostaje odchylone od wejścia, jak pokazano poniżej.
To odchylenie jest wyrażane jako błąd transmisji.
Błąd transmisji = $\frac{(input)\: \thicksim \:(output)}{input\: at \: the\: end\: of\: the\: sweep}$
$$e_t = \frac{V′_s − V}{V′_s}$$
Gdzie v” s jest wejście i V y jest wyjściem na końcu cyklu, to jest w czasie t = t s .
Jeśli odchylenie od liniowości jest bardzo małe, a napięcie przemiatania można przybliżyć sumą składników liniowych i kwadratowych wt, wówczas powyższe trzy błędy są powiązane jako
$$e_d = \frac{e_s}{8} = \frac{e_t}{4}$$
$$e_s = 2e_t = 8e_d$$
Błąd prędkości przesuwu jest bardziej dominujący niż błąd przemieszczenia.
Ponieważ mamy pomysł, że istnieją dwa typy generatorów podstawy czasu, spróbujmy dowiedzieć się o podstawowych obwodach tych obwodów generatorów podstawy czasu.
Generator podstawy czasu napięcia
Generator podstawy czasu, który dostarcza przebieg napięcia wyjściowego, który zmienia się liniowo w czasie, nazywany jest generatorem podstawy czasu napięcia.
Spróbujmy zrozumieć podstawowy generator napięcia podstawy czasu.
Prosty generator podstawy czasu napięcia
Podstawowym prosty RC generator podstawy czasu lub generator ramp lub układ usuwający zawiera kondensator C, który przez ładunki V CC przez dołączony szeregowo rezystor R 2 . Zawiera BJT, którego podstawa jest połączona przez rezystor R 1 . Kondensator ładuje się przez rezystor i rozładowuje przez tranzystor.
Poniższy rysunek przedstawia prosty obwód przemiatania RC.

Przy stosowaniu dodatniej będzie impuls napięcia, tranzystor Q na zwoje do nasycenia, a kondensator rozładowuje się szybko do Q i R 1 do V Ce (nasycony) . Po zakończeniu impulsu wejściowego Q wyłącza się, a kondensator C rozpoczyna ładowanie i kontynuuje ładowanie do następnego impulsu wejściowego. Ten proces powtarza się, jak pokazano na poniższym przebiegu.

Gdy tranzystor włącza się, zapewnia ścieżkę o niskiej rezystancji dla szybkiego rozładowania kondensatora. Gdy tranzystor jest w stanie WYŁĄCZONY, kondensator będzie ładował się wykładniczo do napięcia zasilania V CC , zgodnie z równaniem
$$V_0 = V_{CC}[1 - exp(-t/RC)]$$
Gdzie
- V O = chwilowe napięcie na kondensatorze w czasie t
- V CC = napięcie zasilania
- t = czas potrzebny
- R = wartość rezystora szeregowego
- C = wartość kondensatora
Spróbujmy teraz dowiedzieć się o różnych typach generatorów podstawy czasu.
Obwód, który właśnie omówiliśmy, jest obwodem generatora napięcia podstawy czasu, ponieważ oferuje wyjście w postaci napięcia.
Generator aktualnej podstawy czasu
Generator podstawy czasu, który dostarcza przebieg prądu wyjściowego, który zmienia się liniowo w czasie, nazywany jest generatorem podstawy czasu bieżącego.
Spróbujmy zrozumieć podstawowy generator aktualnej podstawy czasu.
Prosty generator aktualnej podstawy czasu
Podstawowy prosty generator podstawy czasu RC lub generator rampy lub obwód przemiatania składa się z tranzystora konfiguracji ze wspólną podstawą i dwóch rezystorów, z których jeden znajduje się w emiterze, a drugi w kolektorze. V CC jest podawane do kolektora tranzystora. Schemat obwodu podstawowego generatora prądu rampowego jest pokazany poniżej.
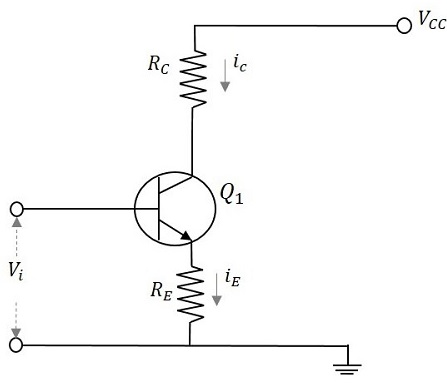
Tranzystor podłączony w konfiguracji ze wspólną podstawą ma prąd kolektora zmienia się liniowo wraz z prądem emitera. Gdy prąd emitera jest utrzymywany na stałym poziomie, prąd kolektora również będzie zbliżony do stałej wartości, z wyjątkiem bardzo mniejszych wartości napięcia podstawowego kolektora.
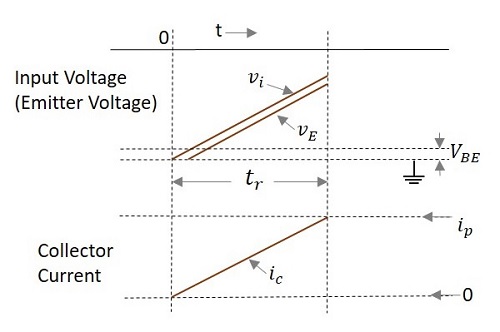
Gdy napięcie wejściowe V i jest przyłożone do podstawy tranzystora, pojawia się ono na emiterze, który wytwarza prąd emitera i E i rośnie on liniowo wraz ze wzrostem V i od zera do wartości szczytowej. Kolektor prądu zwiększa się emiter prąd wzrasta, ponieważ C ściśle równą ı E .
Chwilowa wartość prądu obciążenia wynosi
$$i_L i_C \thickapprox (v_i - V_{BE})/R_E$$
Przebiegi wejściowe i wyjściowe są pokazane poniżej.
Generator wobulacji typu bootstrap to obwód generatora podstawy czasu, którego sygnał wyjściowy jest podawany z powrotem na wejście poprzez sprzężenie zwrotne. Spowoduje to zwiększenie lub zmniejszenie impedancji wejściowej obwodu. Ten procesbootstrapping służy do uzyskania stałego prądu ładowania.
Budowa generatora bazy czasu Bootstrap
Obwód generatora podstawy czasu paska rozruchowego składa się z dwóch tranzystorów, Q 1, który działa jako przełącznik i Q 2, który działa jako popychacz emitera. Tranzystor Q 1 jest połączony za pomocą kondensatora C wejściowych B u jej podstawy i rezystor R B przez V CC . Kolektor tranzystora Q 1 jest połączony z podstawą tranzystora Q 2 . Kolektor Q 2 jest podłączony do V CC, a jego emiter jest wyposażony w rezystor R E, przez który pobierane jest wyjście.
Dioda D podjęte, którego anoda jest połączona z V CC , a katoda jest połączona z kondensatorem C 2 , który jest podłączony do wyjścia. Katoda diody D jest również połączony z rezystora R, która jest z kolei połączony z kondensatorem C 1 . Te C 1 i R są połączone przez podstawę Q 2 i kolektor Q 1 . Napięcie, który pojawia się na kondensatorze C 1 dostarcza napięcie wyjściowe V O .
Poniższy rysunek wyjaśnia budowę generatora podstawy czasu paska rozruchowego.

Działanie generatora podstawy czasu Bootstrap
Przed zastosowaniem przebiegu bramkowania przy t = 0, ponieważ tranzystor otrzymuje wystarczającą ilość napędu bazowego od V CC do R B , Q 1 jest włączony, a Q 2 wyłączony. Kondensator C 2 ładuje się do V CC pośrednictwem diody D. Następnie ujemnego impulsu wyzwalającego z przebiegu bramkowania monostabilnego multiwibratora jest stosowany w oparciu o Q 1 , która przechodzi Q 1 OFF. Kondensator C 2 wyładowuje się i kondensator C 1 opłaty przez rezystor R. Ponieważ kondensator C 2 ma dużą wartość pojemności, jego poziom napięcia (ładowania i rozładowania) różnią się w wolniejszym tempie. W związku z tym rozładowuje się powoli i utrzymuje prawie stałą wartość podczas generowania rampy na wyjściu Q 2 .
W czasie rampy dioda D jest spolaryzowana odwrotnie. Kondensator C 2 zapewnia niewielki prąd I C1 kondensatora C 1 ładować. Ponieważ wartość pojemności jest wysoka, chociaż zapewnia prąd, nie robi dużej różnicy w jego ładunku. Kiedy Q 1 zostaje ZAŁĄCZONY na końcu czasu rampy, C 1 rozładowuje się szybko do swojej wartości początkowej. To napięcie pojawia V O . W związku z tym, dioda D zostanie spolaryzowana w kierunku przewodzenia, a kolejny kondensator C 2 otrzymuje impuls prądu odzyskać niewielki ładunek utracone podczas ładowania C 1 . Teraz obwód jest gotowy do wytworzenia kolejnej rampy wyjściowej.
Kondensator C2 który pomaga w dostarczaniu prądu sprzężenia zwrotnego do kondensatora C1 działa jako boot strapping capacitor który zapewnia stały prąd.
Przebiegi wyjściowe
Przebiegi wyjściowe uzyskuje się, jak pokazano na poniższym rysunku.

Impuls podane na wejścia i napięcia V C1 , który oznacza ładowania i rozładowania kondensatora C 1 co przyczynia wyjście przedstawiono na rysunku powyżej.
Korzyść
Główną zaletą tego generatora rampy rozruchowej jest to, że rampa napięcia wyjściowego jest bardzo liniowa, a amplituda rampy osiąga poziom napięcia zasilania.
Popularny jest tranzystorowy obwód generatora podstawy czasu Millera Miller integratorobwód wytwarzający przebieg przemiatający. Jest to najczęściej używane w obwodach odchylania poziomego.
Spróbujmy zrozumieć budowę i działanie obwodu generatora podstawy czasu Millera.
Budowa generatora przemiatania Millera
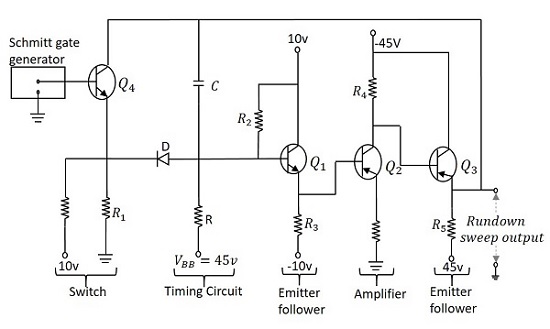
Obwód generatora podstawy czasu Millera składa się z przełącznika i obwodu czasowego w początkowej fazie, którego sygnał wejściowy jest pobierany z obwodu generatora bramki Schmitta. Sekcja wzmacniacza to kolejna, która ma trzy stopnie, z których pierwszy toemitter follower, drugi an amplifier a trzeci jest również emitter follower.
Obwód wtórnika emitera zwykle działa jako Buffer amplifier. To malow output impedance i a high input impedance. Niska impedancja wyjściowa pozwala układowi sterować dużym obciążeniem. Wysoka impedancja wejściowa zapobiega obciążaniu obwodu poprzedniego obwodu. Ostatnia sekcja wtórnika emitera nie załaduje poprzedniej sekcji wzmacniacza. Z tego powodu wzmocnienie wzmacniacza będzie wysokie.
Kondensator C umieszczony między podstawą Q 1 a emiterem Q 3 jest kondensatorem taktowania. Wartości R i C oraz zmiana poziomu napięcia V BB zmienia prędkość przemiatania. Poniższy rysunek przedstawia obwód generatora podstawy czasu Millera.
Działanie generatora przemiatania Millera
Gdy wyjście generatora wyzwalającego Schmitta jest impulsem ujemnym, tranzystor Q 4 włącza się, a prąd emitera przepływa przez R 1 . Emiter ma potencjał ujemny i to samo jest przykładane do katody diody D, co powoduje, że jest on spolaryzowany do przodu. Ponieważ kondensator C jest tutaj pominięty, nie jest ładowany.
Zastosowanie impulsu wyzwalającego powoduje, że wyjście bramki Schmitta jest wysokie, co z kolei wyłącza tranzystor Q 4 . Teraz na emiterze Q 4 przykładane jest napięcie 10 V, które powoduje przepływ prądu przez R 1, co powoduje również, że dioda D jest spolaryzowana odwrotnie. Ponieważ tranzystor Q 4 jest odcięcia, kondensator C zostaje pobrana z V BB z R i posiada wyjście przemiatania zniszczony na emiterze Q 3 . Kondensator C rozładowuje się przez D i tranzystor Q 4 na końcu przemiatania.
Biorąc pod uwagę wpływ pojemności C 1 , prędkość zbocza lub błąd prędkości przesuwu są podane przez
$$e_s = \frac{V_s}{V} \left( 1- A + \frac{R}{R_i} + \frac{C}{C_i} \right )$$
Aplikacje
Obwody przemiatania Millera są najczęściej używanymi układami integratora w wielu urządzeniach. Jest to szeroko stosowany generator zębów pił.
Tranzystor jednozłączowy to taki tranzystor, który ma pojedyncze złącze PN, ale nadal nie ma diody. Tranzystor jednozłączowy lub po prostuUJTma emiter i dwie bazy, w przeciwieństwie do zwykłego tranzystora. Składnik ten jest szczególnie znany ze swojej ujemnej rezystancji, a także z zastosowania jako oscylator relaksacyjny.
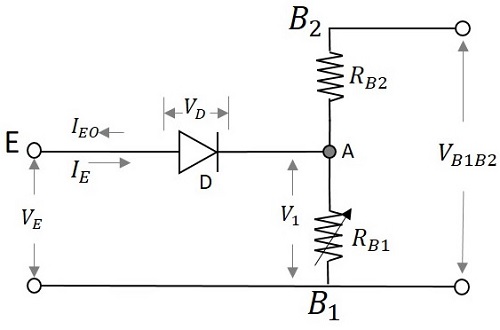
Budowa UJT
Uważa się, że pręt z silnie rezystancyjnego krzemu typu n tworzy strukturę podstawy. Dwa styki omowe są narysowane na obu końcach stanowiących obie podstawy. Jest do niego przymocowana aluminiowa konstrukcja podobna do pręta, który staje się emiterem. Ten emiter leży blisko bazy 2 i trochę daleko od podstawy 1. Oba łączą się, tworząc złącze PN. Ponieważ występuje pojedyncze złącze PN, komponent ten nazywany jest jakoUnijunction transistor.
Wewnętrzny opór zwany as intrinsic resistancewystępuje wewnątrz pręta, którego wartość rezystancji zależy od stężenia domieszki w kostce. Konstrukcja i symbol UJT przedstawiono poniżej.

W symbolu emiter jest oznaczony nachyloną strzałką, a pozostałe dwa końce wskazują podstawy. Ponieważ UJT jest rozumiany jako połączenie diody i pewnej rezystancji, wewnętrzną strukturę UJT można wskazać za pomocą równoważnego schematu wyjaśniającego działanie UJT.
Działanie UJT
Działanie UJT można zrozumieć za pomocą jego równoważnego obwodu. Napięcie przyłożone do emitera jest oznaczone jako V E, a rezystancje wewnętrzne są oznaczone jako R B1 i R B2 odpowiednio w podstawach 1 i 2. Obie wewnętrzne rezystancje są razem nazywane jakointrinsic resistance, oznaczony jako R BB . Napięcie na RB1 można oznaczyć jako V 1 . Napięcie prądu stałego przyłożone do obwodu to V BB .
Obwód zastępczy UJT jest taki, jak podano poniżej.
Początkowo, gdy nie jest przyłożone napięcie,
$$V_E = 0$$
Następnie napięcie V BB jest przykładane przez R B2 . Dioda D będzie działała odwrotnie. Napięcie na diodzie będzie równe VB, które jest napięciem bariery diody nadawczej. Ze względu na zastosowanie V BB , niektóre napięcia pojawia się w punkcie A. Tak więc, całkowite napięcie będzie V + V B .
Teraz, jeśli napięcie V E emitera jest zwiększone, prąd I E przepływa przez diodę D. Ten prąd powoduje, że dioda jest spolaryzowana do przodu. Nośniki są indukowane, a opór R B1 dalej maleje. Dlatego potencjał na R B1, co oznacza V B1, również maleje.
$$V_{B1} = \left( \frac{R_{B1}}{R_{B1} + R_{B2}} \right )V_{BB}$$
Ponieważ V BB jest stałe, a R B1 spada do swojej minimalnej wartości ze względu na stężenie domieszki w kanale, V B1 również maleje.
W rzeczywistości opory obecne wewnętrznie są razem nazywane jako intrinsic resistance, oznaczony jako R BB . Wspomniany opór można określić jako
$$R_{BB} = R_{B1} + R_{B2}$$
$$\left( \frac{R_{B1}}{R_{BB}} \right ) = \eta$$
Symbol η jest używany do przedstawienia całkowitego przyłożonego oporu.
Stąd napięcie na V B1 jest reprezentowane jako
$$V_{B1} = \eta V_{BB}$$
Napięcie emitera podano jako
$$V_E = V_D + V_{B1}$$
$$V_E = 0.7 + V_{B1}$$
Gdzie V D to napięcie na diodzie.
Gdy dioda zostanie polaryzowana do przodu, napięcie na niej będzie wynosić 0,7 V. Tak więc jest to stałe, a V B1 maleje. Stąd V E maleje. Zmniejsza się do najmniejszej wartości, którą można oznaczyć jako V V nazywaną jakoValley voltage. Napięcie, przy którym UJT zostaje włączony, toPeak Voltageoznaczona jako V P .
VI Charakterystyka UJT
Omawianą dotąd koncepcję jasno przedstawia poniższy wykres.
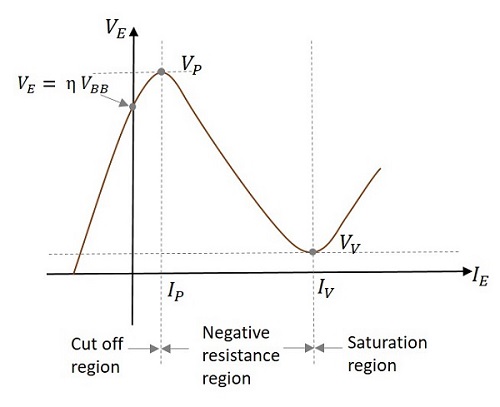
Początkowo, gdy V E jest równe zero, pewien zwrotny prąd IE płynie, aż wartość VE osiągnie punkt, w którym
$$V_E = \eta V_{BB}$$
To jest punkt, w którym krzywa dotyka osi Y.
Kiedy V E osiągnie napięcie, w którym
$$V_E = \eta V_{BB} + V_D$$
W tym momencie dioda zostaje przesunięta do przodu.
Napięcie w tym punkcie nazywa się V P (Peak Voltage), a prąd w tym miejscu nazywany jest I P (Peak Current). Część wykresu do tej pory jest określana jakoCut off region ponieważ UJT był w stanie OFF.
Teraz, gdy V E jest dalej zwiększane, rezystancja R B1, a następnie napięcie V 1 również maleje, ale prąd przez nią wzrasta. To jestNegative resistance property stąd region ten nazywany jest jako Negative resistance region.
Teraz napięcie V E osiąga pewien punkt, w którym dalszy wzrost prowadzi do wzrostu napięcia na R B1 . Napięcie w tym momencie nazywa się V V (Valley Voltage), a prąd w tym miejscu nazywa się I V (Valley Current). Region po tym jest określany jakoSaturation region.
Zastosowania UJT
UJT są najczęściej używane jako oscylatory relaksacyjne. Są również używane w obwodach kontroli fazy. Ponadto UJT są szeroko stosowane do zapewniania zegara dla obwodów cyfrowych, sterowania taktowaniem różnych urządzeń, kontrolowanego odpalania w tyrystorach i synchronizacji impulsowej dla obwodów odchylania poziomego w CRO.
Na oscillatorto urządzenie, które samodzielnie wytwarza przebieg, bez żadnego wejścia. Chociaż pewne napięcie prądu stałego jest przykładane do pracy urządzenia, nie będzie ono generować żadnego sygnału wejściowego. Oscylator relaksacyjny to urządzenie, które wytwarzanon-sinusoidal waveformna własną rękę. Ten przebieg zależy zasadniczo od stałych czasowych ładowania i rozładowywania kondensatora w obwodzie.
Budowa i praca
Emiter UJT jest połączony z rezystorem i kondensatorem, jak pokazano. Stała czasowa RC określa czasy przebiegu wyjściowego oscylatora relaksacyjnego. Obie bazy są połączone rezystorem. Podano napięcie zasilania DC V BB .
Poniższy rysunek pokazuje, jak używać UJT jako oscylatora relaksacji.

Początkowo napięcie na kondensatorze wynosi zero.
$$V_c = 0$$
UJT jest wyłączony. RezystorR zapewnia ścieżkę dla kondensatora C ładować przez przyłożone napięcie.
Kondensator ładuje się zgodnie z napięciem
$$V = V_0(1 - e^{-t/RC})$$
Kondensator zwykle zaczyna się ładować i kontynuuje ładowanie do maksymalnego napięcia V BB . Ale w tym obwodzie, gdy napięcie na kondensatorze osiągnie wartość, która umożliwia włączenie UJT (napięcie szczytowe), kondensator przestaje się ładować i zaczyna się rozładowywać przez UJT. Teraz to rozładowanie trwa aż do minimalnego napięcia, które wyłącza UJT (napięcie dolne). Proces ten jest kontynuowany, a napięcie na kondensatorze, gdy jest wskazane na wykresie, obserwuje się następujący przebieg.

Tak więc ładowanie i rozładowanie kondensatora wytwarza przebieg przemiatania, jak pokazano powyżej. Czas ładowania powoduje wydłużenie przemiatania, a czas rozładowania zmniejsza przemiatanie. Powtarzanie tego cyklu tworzy ciągły przebieg wyjściowy przemiatania.
Ponieważ sygnał wyjściowy ma przebieg niesinusoidalny, mówi się, że obwód ten działa jako oscylator relaksacyjny.
Zastosowania oscylatora relaksacyjnego
Oscylatory relaksacyjne są szeroko stosowane w generatorach funkcyjnych, elektronicznych sygnalizatorach dźwiękowych, SMPS, falownikach, migaczach i oscylatorach sterowanych napięciem.
W każdym systemie, który ma różne generatory przebiegów, wszystkie muszą działać synchronicznie. Synchronizacja to proces polegający na tym, że dwa lub więcej generatorów przebiegów dociera do pewnego punktu odniesienia w cyklu dokładnie w tym samym czasie.
Rodzaje synchronizacji
Synchronizacja może mieć dwa następujące typy -
Podstawa jeden do jednego
Wszystkie generatory pracują na tej samej częstotliwości.
Wszystkie docierają do pewnego punktu odniesienia w cyklu dokładnie w tym samym czasie.
Synchronizuj z podziałem częstotliwości
Generatory działają na różnych częstotliwościach, które są całkowitą wielokrotnością siebie.
Wszystkie docierają do pewnego punktu odniesienia w cyklu dokładnie w tym samym czasie.
Urządzenia relaksacyjne
Obwody relaksacyjne to obwody, w których przedział czasowy jest ustalany poprzez stopniowe ładowanie kondensatora, przy czym przedział czasowy kończy się nagłym rozładowaniem (relaksacją) kondensatora.
Examples - Multiwibratory, obwody omiatające, oscylatory blokujące itp.
Zaobserwowaliśmy w obwodzie oscylatora relaksacji UJT, że kondensator przestaje ładować, gdy włącza się urządzenie o ujemnej rezystancji, takie jak UJT. Kondensator następnie rozładowuje się przez niego, aby osiągnąć swoją minimalną wartość. Oba te punkty oznaczają punkty maksymalnego i minimalnego napięcia przebiegu przemiatania.
Synchronizacja w urządzeniach relaksacyjnych
Jeżeli wysokie napięcie lub napięcie szczytowe lub napięcie przebicia przebiegu przemiatania musi zostać obniżone do niższego poziomu, wówczas można zastosować sygnał zewnętrzny. Sygnał ten, który ma być przyłożony, to zsynchronizowany sygnał, którego efektem jest obniżenie napięcia szczytowego lub przebicia na czas trwania impulsu. Impuls synchronizujący jest generalnie przykładany do emitera lub do podstawy ujemnego urządzenia oporowego. W celu uzyskania synchronizacji stosuje się ciąg impulsów z regularnie rozłożonymi impulsami.
Chociaż sygnał synchronizujący zostanie zastosowany, kilka pierwszych impulsów nie będzie miało wpływu na generator przemiatania, ponieważ amplituda sygnału przemiatania przy wystąpieniu impulsu, w dodatku amplituda impulsu jest mniejsza niż VP . W związku z tym generator zamiatania działa niezsynchronizowany. Dokładny moment załączenia UJT jest określany przez moment wystąpienia impulsu. Jest to punkt, w którym sygnał synchronizacji osiąga synchronizację z sygnałem przemiatania. Można to zaobserwować na poniższym rysunku.

Gdzie,
- T P to okres czasu sygnału impulsowego
- T O to okres czasu sygnału przemiatania
- V P to napięcie szczytowe lub przebicia
- V V jest napięciem dolnym lub utrzymującym
Aby osiągnąć synchronizację, interwał czasowy impulsu TP powinien być krótszy niż okres generatora zamiatania TO, tak że przedwcześnie kończy cykl przemiatania. Synchronizacja nie może zostać osiągnięta, jeśli interwał taktowania impulsówTPjest większa niż okres czasu generatora przemiatania T O, a także jeśli amplituda impulsów nie jest wystarczająco duża, aby wypełnić lukę między przebiciem w stanie spoczynku a napięciem przemiatania, chociaż T P jest mniejsze niżTO.
Podział częstotliwości w obwodach przemiatania
W poprzednim temacie zaobserwowaliśmy, że synchronizacja zostaje osiągnięta, gdy spełnione są następujące warunki. Oni są
Kiedy T P <T O
Gdy amplituda impulsu jest wystarczająca do przedwczesnego zakończenia każdego cyklu.
Spełniając te dwa warunki, pomimo osiągnięcia synchronizacji, często możemy natknąć się na pewien interesujący wzorzec w cyklu w odniesieniu do synchronizacji czasowej. Poniższy rysunek ilustruje ten punkt.

Możemy zauważyć, że amplituda V” S w cyklu po synchronizacji jest mniejsza niż rozsynchronizowany amplitudzie V S . Również czasu T O w cyklu jest regulowana w zależności od okresu impulsu ale pozostawiając cyklu pomiędzy. Oznacza to, że jeden cykl przemiatania odpowiada dwóm cyklom impulsów. Synchronizacja jest osiągana dla każdego cyklu naprzemiennego, który stwierdza
$$T_o > 2T_P$$
Czas przemiatania T O ogranicza się do T, S , a jego amplituda zmniejsza się do V” S .
Ponieważ co drugi impuls jest wykonywany w synchronizacji z cyklem przemiatania, sygnał ten można rozumieć jako obwód, który wykazuje dzielenie częstotliwości przez współczynnik 2. W związku z tym obwód z podziałem częstotliwości jest uzyskiwany przez synchronizację.
Oscylator to obwód, który zapewnia alternating voltage lub current by its own, bez żadnych danych wejściowych. Oscylator potrzebuje plikuamplifier a także feedbackz wyjścia. Dostarczane sprzężenie zwrotne powinno być regeneracyjnym sprzężeniem zwrotnym, które wraz z częścią sygnału wyjściowego zawiera składową sygnału wyjściowego, która jest w fazie z sygnałem wejściowym. Oscylator, który wykorzystuje regeneracyjne sprzężenie zwrotne do generowania niesinusoidalnego sygnału wyjściowego, nazywany jest asRelaxation Oscillator.
Widzieliśmy już oscylator relaksacji UJT. Innym typem oscylatora relaksacji jest oscylator blokujący.
Oscylator blokujący
Oscylator blokujący to generator przebiegów, który jest używany do wytwarzania wąskich impulsów lub impulsów wyzwalających. Mając sprzężenie zwrotne z sygnału wyjściowego, blokuje sprzężenie zwrotne po cyklu przez pewien z góry określony czas. Ta funkcjablocking the output będąc an oscillator, pobiera nazwę oscylatora blokującego.
W konstrukcji oscylatora blokującego tranzystor jest używany jako wzmacniacz, a transformator służy do sprzężenia zwrotnego. Zastosowany tutaj transformator toPulse transformer. Symbol transformatora impulsowego przedstawiono poniżej.
Transformator impulsowy
Transformator impulsowy to taki, który łączy źródło prostokątnych impulsów energii elektrycznej z obciążeniem. Zachowanie niezmienionego kształtu i innych właściwości impulsów. Są to transformatory szerokopasmowe zminimum attenuation i zero lub minimum phase change.
Wydajność transformatora zależy od stopnia naładowania i rozładowania podłączonego kondensatora.
Regeneracyjne sprzężenie zwrotne jest łatwe dzięki zastosowaniu transformatora impulsowego. Sygnał wyjściowy może być podawany z powrotem na wejście w tej samej fazie poprzez odpowiedni dobór polaryzacji uzwojenia transformatora impulsowego. Oscylator blokujący to taki swobodnie działający oscylator wykonany przy użyciu kondensatora i transformatora impulsowego wraz z pojedynczym tranzystorem, który jest odcinany przez większość cyklu pracy, wytwarzając okresowe impulsy.
Przy użyciu oscylatora blokującego możliwe są operacje Astable i Monostable. Ale działanie bistabilne nie jest możliwe. Przejdźmy przez nie.
Monostabilny oscylator blokujący
Jeśli oscylator blokujący potrzebuje pojedynczego impulsu, aby zmienić swój stan, nazywany jest obwodem oscylatora blokującego monostabilnego. Te monostabilne oscylatory blokujące mogą być dwojakiego rodzaju. Oni są
- Monostabilny oscylator blokujący z taktowaniem podstawowym
- Monostabilny oscylator blokujący z taktowaniem emitera
W obu z nich rezystor taktowania R steruje szerokością bramki, która po umieszczeniu w bazie tranzystora staje się podstawowym obwodem taktowania, a po umieszczeniu w emiterze tranzystora staje się obwodem czasowym emitera.
Aby mieć jasne zrozumienie, omówmy działanie podstawowego multiwibratora monostabilnego taktowania.
Wyzwalany przez tranzystor monostabilny oscylator blokujący z taktowaniem podstawowym
Tranzystor, transformator impulsowy do sprzężenia zwrotnego i rezystor w podstawie tranzystora stanowią obwód wyzwalanego tranzystorem monostabilnego oscylatora blokującego z taktowaniem podstawowym. Zastosowany transformator impulsowy ma współczynnik zwojów wynoszącyn: 1 gdzie obwód bazowy ma nobroty na każdy obrót obwodu kolektora. Opornik R jest połączony szeregowo z podstawą tranzystora, która kontroluje czas trwania impulsu.
Początkowo tranzystor jest wyłączony. Jak pokazano na poniższym rysunku, VBB jest uważane za zerowe lub za niskie, co jest pomijalne.
Napięcie na kolektorze wynosi V CC , ponieważ urządzenie jest wyłączone. Ale gdy na kolektorze zostanie zastosowany wyzwalacz ujemny, napięcie zostanie zmniejszone. Z powodu biegunowości uzwojenia transformatora napięcie kolektora spada, podczas gdy napięcie bazowe rośnie.
Kiedy napięcie podstawy do emitera staje się większe niż napięcie włączenia, tj
$$V_{BE} > V_\gamma$$
Następnie obserwuje się mały prąd bazowy. Zwiększa to prąd kolektora, co zmniejsza napięcie kolektora. To działanie kumuluje się dalej, co zwiększa prąd kolektora i dalej zmniejsza napięcie kolektora. Przy regeneracyjnym sprzężeniu zwrotnym, jeśli wzmocnienie pętli wzrasta, tranzystor szybko osiąga nasycenie. Ale to nie jest stan stabilny.
Następnie obserwuje się mały prąd bazowy. Zwiększa to prąd kolektora, co zmniejsza napięcie kolektora. To działanie kumuluje się dalej, co zwiększa prąd kolektora i dalej zmniejsza napięcie kolektora. Przy regeneracyjnym sprzężeniu zwrotnym, jeśli wzmocnienie pętli wzrasta, tranzystor szybko osiąga nasycenie. Ale to nie jest stan stabilny.
Kiedy tranzystor osiąga nasycenie, prąd kolektora wzrasta, a prąd bazowy jest stały. Teraz prąd kolektora powoli zaczyna ładować kondensator, a napięcie na transformatorze spada. Ze względu na polaryzację uzwojeń transformatora napięcie bazowe wzrasta. To z kolei zmniejsza prąd bazowy. To skumulowane działanie powoduje, że tranzystor przechodzi w stan odcięcia, czyli stabilny stan obwodu.
Plik output waveforms są następujące -

Główny disadvantagetego obwodu polega na tym, że wyjściowa szerokość impulsu nie może być utrzymywana na stałym poziomie. Wiemy, że prąd kolektora jest
$$i_c = h_{FE}i_B$$
Ponieważ h FE jest zależne od temperatury, a szerokość impulsu zmienia się liniowo wraz z tym, wyjściowa szerokość impulsu nie może być stabilna. Również h FE zmienia się w zależności od zastosowanego tranzystora.
W każdym razie tę wadę można wyeliminować, jeśli rezystor zostanie umieszczony w emiterze, co oznacza, że rozwiązaniem jest emitter timing circuit. Gdy wystąpi powyższy stan, tranzystor wyłącza się w obwodzie czasowym emitera, dzięki czemu uzyskuje się stabilny sygnał wyjściowy.
Astable blokujący oscylator
Jeśli oscylator blokujący może zmienić swój stan automatycznie, nazywany jest Astable blokującym obwodem oscylatora. Te Astable blokujące oscylatory mogą być dwojakiego rodzaju. Oni są
- Sterowany diodą Astable blokujący oscylator
- Sterowany RC Astable blokujący oscylator
W sterowanym diodowo oscylatorze blokującym Astable dioda umieszczona w kolektorze zmienia stan oscylatora blokującego. Podczas gdy w sterowanym przez RC oscylatorze blokującym Astable, rezystor taktowania R i kondensator C tworzą sieć w sekcji nadajnika, aby sterować taktowaniem impulsów.
Aby dobrze zrozumieć, omówmy działanie oscylatora blokującego Astable sterowanego diodą.
Sterowany diodą Astable blokujący oscylator
Sterowany diodą oscylator blokujący Astable zawiera transformator impulsowy w obwodzie kolektora. Kondensator jest podłączony pomiędzy obwodem wtórnym transformatora a podstawą tranzystora. Podstawa transformatora i dioda są połączone w kolektorze.
Na initial pulse jest podawany na kolektorze tranzystora w celu zainicjowania procesu i stamtąd no pulses are requireda obwód zachowuje się jak Astable Multivibrator. Poniższy rysunek przedstawia obwód sterowanego diodowo oscylatora blokującego Astable.

Początkowo tranzystor jest wyłączony. Aby zainicjować obwód, do kolektora przykładany jest ujemny impuls wyzwalający. Dioda, której anoda jest podłączona do kolektora, będzie w stanie odwrotnej polaryzacji i zostanie wyłączona po zastosowaniu tego ujemnego impulsu wyzwalającego.
Impuls ten jest doprowadzany do transformatora impulsowego i ze względu na polaryzację uzwojenia (jak pokazano na rysunku), indukowana jest taka sama ilość napięcia bez jakiejkolwiek inwersji faz. To napięcie przepływa przez kondensator w kierunku podstawy, dostarczając pewien prąd bazowy. Ten prąd bazy, tworzy pewną podstawę do emiter, które, gdy przecina wycięcie napięcia popycha tranzystora Q 1 ON. Teraz prąd kolektora tranzystora Q 1 wzrasta i jest doprowadzany zarówno do diody, jak i do transformatora. Dioda, która była początkowo WYŁĄCZONA, teraz zaświeci się. Napięcie, które jest indukowane w uzwojeniach pierwotnych transformatora, indukuje pewne napięcie w uzwojeniu wtórnym transformatora, za pomocą którego kondensator rozpoczyna ładowanie.
Ponieważ kondensator nie dostarcza prądu podczas ładowania, prąd bazowy i B przestaje płynąć. Powoduje to WYŁĄCZENIE tranzystora Q 1 . Stąd stan się zmienia.
Teraz dioda, która była włączona, ma na sobie pewne napięcie, które jest podawane do pierwotnego transformatora, który jest indukowany do wtórnego. Teraz prąd przepływa przez kondensator, co umożliwia jego rozładowanie. Stąd płynie prąd bazowy i B, ponownie włączając tranzystor. Przebiegi wyjściowe przedstawiono poniżej.

Ponieważ dioda pomaga tranzystorowi w zmianie jego stanu, obwód ten jest sterowany diodą. Ponadto, ponieważ impuls wyzwalający jest stosowany tylko w momencie inicjacji, podczas gdy obwód samoczynnie zmienia swój stan, obwód ten jest oscylatorem Astable. Stąd nazwa sterowany diodą Astable blokujący oscylator.
Inny typ obwodu wykorzystuje kombinację R i C w części emitera tranzystora i jest nazywany obwodem oscylatora blokującego Astable sterowanego RC.
Do tej pory napotkaliśmy różne obwody impulsowe. Czasami pojawia się potrzeba ograniczenia stosowania takich wejść impulsowych do pewnych okresów czasu. Obwód, który pomaga nam w tym aspekcie, toSampling gate circuit. Są one również nazywane jakolinear gates lub transmission gates lub selection circuits.
Te bramki próbkujące pomagają w wyborze sygnału transmisji w określonym przedziale czasu, dla którego sygnał wyjściowy jest taki sam jak sygnał wejściowy lub zero w innym przypadku. Ten okres czasu jest wybierany za pomocącontrol signal lub selection signal.
Bramki próbkowania
W przypadku bramki próbkującej sygnał wyjściowy musi być taki sam jak sygnał wejściowy lub proporcjonalny do sygnału wejściowego w wybranym przedziale czasu, aw innym przypadku powinien wynosić zero. Ten wybrany okres jest nazywany jakoTransmission Period a drugi okres nazywany jest jako Non-transmission Period. Jest to wybierane za pomocącontrol signaloznaczone V C . Poniższy rysunek wyjaśnia ten punkt.

Kiedy sygnał sterujący V C jest na V 1 , bramka próbkowania jest zamknięta, a kiedy V C jest na V 2 , jest otwarta. Szerokość impulsu Tg wskazuje okres czasu, w którym stosowany jest impuls bramki.
Rodzaje bramek do pobierania próbek
Rodzaje bramek próbkujących obejmują -
Unidirectional sampling sgates- Tego typu bramki próbkowania mogą przepuszczać przez nie dodatnie lub ujemne impulsy. Są zbudowane za pomocą diod.
Bidirectional sampling gate- Tego typu bramki próbkowania mogą przepuszczać przez nie zarówno dodatnie, jak i ujemne impulsy. Są zbudowane przy użyciu diod lub BJT.
Rodzaje używanych przełączników
Bramki próbkujące mogą być zbudowane jako łączniki szeregowe lub bocznikowe. Okres czasu, w którym przełącznik ma być otwarty lub zamknięty, jest określany przez sygnał impulsu bramkowania. Przełączniki te zostały zastąpione elementami aktywnymi, takimi jak diody i tranzystory.
Poniższy rysunek przedstawia schematy blokowe bramek próbkujących z łącznikami szeregowymi i bocznikowymi.

Bramka próbkowania wykorzystująca przełącznik szeregowy
W tego typu wyłączniku, jeśli wyłącznik S jest zamknięty, wyjście będzie dokładnie równe lub proporcjonalne do wejścia. Tym okresem będzieTransmission Period.
Jeśli przełącznik S jest otwarty, na wyjściu będzie sygnał zerowy lub sygnał masy. Tym okresem będzieNon-transmission Period.
Bramka próbkowania wykorzystująca przełącznik bocznikowy
W tego typu przełączniku, jeśli przełącznik S jest zamknięty, na wyjściu będzie sygnał zerowy lub sygnał masy. Tym okresem będzieNon-transmission Period.
Jeśli przełącznik S jest rozwarty, wyjście będzie dokładnie równe lub proporcjonalne do wejścia. Tym okresem będzieTransmission Period.
Bramki próbkowania są zupełnie inne niż bramki logiczne obwodów cyfrowych. Są również reprezentowane przez impulsy lub poziomy napięcia. Ale są to bramki cyfrowe i ich wyjście nie jest dokładną repliką wejścia. Natomiast obwody bramek próbkujących są bramkami analogowymi, których wyjście jest dokładną repliką wejścia.
W następnych rozdziałach omówimy typy bramek próbkujących.
Po zapoznaniu się z koncepcją bramek próbkowania, spróbujmy teraz zrozumieć typy bramek próbkowania. Jednokierunkowe bramki próbkowania mogą przepuszczać przez nie dodatnie lub ujemne impulsy. Są zbudowane za pomocą diod.
Jednokierunkowy obwodu bramki próbkowania składa się z kondensatora C, dioda D i dwa rezystory R 1 i R l . Sygnał wejściowy jest podawany do kondensatora, a sygnał sterujący do rezystora R 1 . Wyjście jest pobierane przez rezystor obciążający R L . Obwód jest taki, jak pokazano poniżej.

Zgodnie z działaniem diody przewodzi tylko wtedy, gdy anoda diody jest bardziej dodatnia niż katoda diody. Jeżeli dioda ma na wejściu sygnał dodatni, to przewodzi. Okres czasu, w którym sygnał bramki jest włączony, to okres transmisji. Stąd dzieje się to w tym okresie, w którym przesyłany jest sygnał wejściowy. W przeciwnym razie transmisja nie jest możliwa.
Poniższy rysunek przedstawia okresy czasu sygnału wejściowego i sygnału bramki.

Sygnał wejściowy jest przesyłany tylko przez okres czasu, w którym bramka jest WŁĄCZONA, jak pokazano na rysunku.
Z obwodu, który mamy,
Anoda diody jest przykładana z dwoma sygnałami (V S i V C ). Jeśli napięcie na anodzie jest wskazane jako V P, a napięcie na katodzie jest wskazane jako V N, to napięcie wyjściowe jest otrzymywane jako
$$V_o = V_P = (V_S + V_C) > V_N$$
Więc dioda jest w stanie przewodzenia.
$$V_O = V_S + V_1 > V_N$$
Następnie
$$V_O = V_S$$
Gdy V 1 = 0,
Następnie
$$V_O = V_S + V_1 \: Which \: means \: V_O = V_S$$
Idealna wartość V 1 = 0.
Tak więc, jeśli V 1 = 0, cały sygnał wejściowy pojawia się na wyjściu. Jeśli wartość V 1 jest ujemna, to część wejścia jest tracona, a jeśli V 1 jest dodatnia, na wyjściu pojawia się dodatkowy sygnał wraz z wejściem.
To wszystko dzieje się w okresie transmisji.
W okresie bez transmisji
$$V_O = 0$$
Ponieważ dioda jest w stanie spolaryzowanym do tyłu
Gdy napięcie na anodzie jest mniejsze niż napięcie na katodzie,
$$V_S + V_C < 0 \: Volts$$
W okresie bez transmisji
$$V_C = V_2$$
$$V_S + V_2 < 0$$
Wielkość V 2 powinna być bardzo duża niż V s .
$$|V_2| ≫ V_S$$
Ponieważ aby dioda działała odwrotnie, suma napięć V S i V C powinna być ujemna. V C (czyli teraz V 2 ) powinno być tak ujemne, jak to tylko możliwe, tak aby chociaż V S było dodatnie, suma obu napięć powinna dawać wynik ujemny.
Przypadki specjalne
Zobaczmy teraz kilka przypadków dla różnych wartości napięć wejściowych, w których napięcie sterujące ma pewną wartość ujemną.
Przypadek 1
Weźmy przykład, gdzie V S = 10 V i V C = -10 V (V 1 ) do -20 V (V 2 )
Teraz, kiedy te dwa sygnały zostaną zastosowane (V S i V C ), wówczas napięcie na anodzie będzie
$$V_P = V_S + V_C$$
Ponieważ jest to o okresie transmisji tylko V 1 jest uważany za V C .
$$V_O = (10V) + (-10V) = 0V$$
Stąd na wyjściu będzie zero, chociaż przykładana jest pewna ilość napięcia wejściowego. Poniższy rysunek wyjaśnia ten punkt.

Przypadek 2
Weźmy przykład, gdzie V S = 10 V i V C = -5 V (V 1 ) do -20 V (V 2 )
Teraz, kiedy te dwa sygnały zostaną zastosowane (V S i V C ), wówczas napięcie na anodzie będzie
$$V_P = V_S + V_C$$
Ponieważ jest to o okresie transmisji tylko V 1 jest uważany za V C .
$$V_O = (10V) + (-5V) = 5V$$
Stąd wyjście będzie wynosić 5 V. Poniższy rysunek wyjaśnia ten punkt.

Przypadek 3
Weźmy przykład, gdzie V S = 10 V i V C = 0v (V 1 ) do -20v (V 2 )
Teraz, kiedy te dwa sygnały zostaną zastosowane (V S i V C ), wówczas napięcie na anodzie będzie
$$V_P = V_S + V_C$$
Ponieważ jest to o okresie transmisji tylko V 1 jest uważany za V C .
$$V_O = (10V) + (0V) = 10V$$
Stąd wyjście będzie wynosić 10 V. Poniższy rysunek wyjaśnia ten punkt.

Przypadek 4
Weźmy przykład, gdzie V S = 10 V i V C = 5v (V 1 ) do -20v (V 2 )
Teraz, kiedy te dwa sygnały zostaną zastosowane (V S i V C ), wówczas napięcie na anodzie będzie
$$V_P = V_S + V_C$$
Ponieważ jest to o okresie transmisji tylko V 1 jest uważany za V C .
$$V_O = (10V) + (5V) = 15V$$
Stąd wyjście będzie wynosić 15 V.
Na napięcie wyjściowe wpływa przyłożone napięcie sterujące. To napięcie sumuje się na wejściu, aby wytworzyć wyjście. Dlatego wpływa na wydajność.
Poniższy rysunek przedstawia nałożenie obu sygnałów.

Możemy zauważyć, że w czasie, gdy przyłożone jest tylko napięcie bramki, na wyjściu będzie 5V. Kiedy oba sygnały są stosowane V P występuje jako V O . W okresie bez transmisji sygnał wyjściowy wynosi 0 V.
Jak widać na powyższym rysunku, różnica w sygnałach wyjściowych w okresie transmisji i braku transmisji, chociaż (przy V S = 0) sygnał wejściowy nie jest stosowany, nazywana jestPedestal. Ten cokół może być pozytywny lub negatywny. W tym przykładzie na wyjściu otrzymujemy dodatnią podstawę.
Wpływ RC na napięcie sterujące
Jeśli sygnał wejściowy zostanie przyłożony, zanim napięcie sterujące osiągnie stan ustalony, na wyjściu wystąpią pewne zniekształcenia.
Prawidłowe wyjście uzyskujemy tylko wtedy, gdy sygnał wejściowy jest podany przy sygnale sterującym 0v. To 0v jest wartością stabilną. Jeśli sygnał wejściowy zostanie podany wcześniej, wystąpią zniekształcenia.

Powolny wzrost napięcia sterującego w punkcie A jest spowodowany obecnością obwodu RC. Stała czasowa będąca wynikiem RC wpływa na kształt tego przebiegu.
Plusy i minusy jednokierunkowych bramek do pobierania próbek
Przyjrzyjmy się zaletom i wadom jednokierunkowej bramki próbkowania.
Zalety
Obwód jest prosty.
Opóźnienie czasowe między wejściem a wyjściem jest zbyt małe.
Można go rozszerzyć na większą liczbę wejść.
W okresie bez transmisji nie jest pobierany prąd. W związku z tym w stanie spoczynku nie występuje żadne rozpraszanie mocy.
Niedogodności
Istnieje interakcja między sygnałami sterującymi i wejściowymi (V C i V S )
Wraz ze wzrostem liczby wejść rośnie obciążenie na wejściu sterującym.
Wyjście jest wrażliwe na napięcie sterujące V 1 (górny poziom V C )
W jednej chwili należy zastosować tylko jedno wejście.
Z powodu powolnego czasu narastania sygnału sterującego wyjście może ulec zniekształceniu, jeśli sygnał wejściowy zostanie przyłożony przed osiągnięciem stanu ustalonego.
Obwody jednokierunkowej bramki próbkowania, które omówiliśmy do tej pory, mają pojedyncze wejście. W tym rozdziale omówimy kilka więcej jednokierunkowych obwodów bramek próbkujących, które mogą obsługiwać więcej niż jeden sygnał wejściowy.
Jednokierunkowy obwód bramki próbkowania składa się z kondensatorów i rezystorów o tej samej wartości. W tym przypadku rozważa się dwie wejściowe jednokierunkowe bramki próbkowania diody z dwoma wejściami. W tym obwodzie mamy dwa kondensatory i dwa rezystory o tej samej wartości. Są połączone po dwie diody.
Sygnał sterujący podawany jest na rezystory. Wyjście jest przenoszone przez rezystor obciążenia. Poniższy rysunek przedstawia schemat obwodu jednokierunkowej bramki próbkującej diody z więcej niż jednym sygnałem wejściowym.
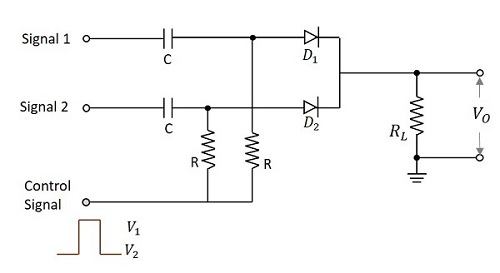
Gdy podane jest wejście sterujące,
Przy V C = V 1, który jest w okresie transmisji, obie diody D 1 i D 2 są spolaryzowane do przodu. Teraz wynik będzie sumą wszystkich trzech danych wejściowych.
$$V_O = V_{S1} + V_{S2} + V_C$$
Dla V 1 = 0v, co jest wartością idealną,
$$V_O = V_{S1} + V_{S2}$$
Tutaj mamy duże ograniczenie polegające na tym, że w dowolnym momencie w okresie transmisji powinno być stosowane tylko jedno wejście. To jest wada tego obwodu.
W okresie bez transmisji
$$V_C = V_2$$
Obie diody będą działały odwrotnie, co oznacza otwarty obwód.
To sprawia, że wyjście
$$V_O = 0V$$
Główną wadą tego obwodu jest to, że loading of the circuitrośnie wraz ze wzrostem liczby nakładów. Ograniczenia tego można uniknąć, stosując inny obwód, w którym wejście sterujące podawane jest za diodami sygnału wejściowego.
Redukcja cokołów
Przechodząc przez różne typy bramek próbkujących i wytwarzane przez nie wyjścia, napotkaliśmy dodatkowy poziom napięcia w przebiegach wyjściowych zwany Pedestal. Jest to niepożądane i powoduje hałas.
Redukcja piedestału w obwodzie bramki
Różnica w sygnałach wyjściowych podczas okresu transmisji i okresu bez transmisji, mimo że sygnały wejściowe nie są stosowane, nazywa się Pedestal. Może to być cokół pozytywny lub negatywny.
Stąd jest to wyjście obserwowane z powodu napięcia bramkującego, chociaż sygnał wejściowy jest nieobecny. Jest to niepożądane i należy je ograniczyć. Poniższy obwód jest przeznaczony do redukcji cokołu w obwodzie bramki.

Kiedy sygnał sterujący jest przyłożony, w czasie transmisji, tj. Przy V 1 , Q 1 włącza się, a Q 2 wyłącza, a V CC jest przykładane przez R C do Q 1 . Podczas gdy w okresie bez transmisji, tj. Przy V 2 , Q 2 włącza się, a Q 1 wyłącza, a V CC jest przykładane przez R C do Q 2 . Napięcia bazowe –V BB1 i –V BB2 oraz amplituda sygnałów bramki są regulowane w taki sposób, że prądy dwóch tranzystorów są identyczne, w wyniku czego poziom spoczynkowego napięcia wyjściowego pozostaje stały.
Jeśli napięcie impulsu bramki jest duże w porównaniu z V BE tranzystorów, wówczas każdy tranzystor jest spolaryzowany znacznie poniżej odcięcia, gdy nie przewodzi. Tak więc, gdy pojawi się napięcie bramki, Q 2 zostanie odcięte, zanim Q 1 zacznie przewodzić, podczas gdy na końcu bramki Q 1 zostanie odcięte, zanim Q 2 zacznie przewodzić.
Poniższy rysunek wyjaśnia to w lepszy sposób.

Stąd sygnały bramki pojawiają się jak na powyższym rysunku. Bramkowane napięcie sygnału pojawi się nałożone na ten przebieg. Te skoki będą miały pomijalną wartość, jeśli czas narastania fali bramki jest mały w porównaniu z czasem trwania bramki.
Jest ich kilka drawbacks tego obwodu, takich jak
Określone czasy narastania i opadania powodują ostre skoki
Ciągły prąd płynący przez RC rozprasza dużo ciepła
Dwa napięcia polaryzacji i dwa źródła sygnału sterującego (wzajemnie uzupełniające się) komplikują obwód.
Poza tymi wadami obwód ten jest przydatny w redukcji cokołu w obwodzie bramki.
Bramki dwukierunkowe, w przeciwieństwie do bramek jednokierunkowych, przesyłają sygnały zarówno o polaryzacji dodatniej, jak i ujemnej. Bramki te mogą być zbudowane przy użyciu tranzystorów lub diod. Z różnych typów obwodów przejdźmy przez obwód złożony z tranzystorów i drugi złożony z diod.
Dwukierunkowe bramki próbkowania wykorzystujące tranzystory
Podstawowa dwukierunkowa bramka próbkowania składa się z tranzystora i trzech rezystorów. Sygnał napięciowy V wyjście S , a napięcie wejściowe Tryb V C są stosowane przez rezystory sumujących do bazy tranzystora. Schemat obwodu podany poniżej przedstawia dwukierunkową bramkę próbkowania wykorzystującą tranzystor.
Zastosowane tutaj wejście sterujące V C jest przebiegiem impulsu o dwóch poziomach V 1 i V 2 oraz szerokości impulsu t p . Ta szerokość impulsu decyduje o żądanym interwale transmisji. Sygnał bramkujący umożliwia przesłanie wejścia. Kiedy sygnał bramkujący jest na swoim niższym poziomie V 2 , tranzystor przechodzi do obszaru aktywnego. Tak więc, dopóki wejście bramkowania nie zostanie utrzymane na wyższym poziomie, sygnały o dowolnej polaryzacji, które pojawiają się u podstawy tranzystora, będą próbkowane i będą wyglądać na wzmocnione na wyjściu.
Dwukierunkowa bramka do pobierania próbek z czterema diodami
Dwukierunkowy obwód bramki próbkującej jest również wykonany przy użyciu diod. Dwukierunkowa bramka próbkująca z dwiema diodami jest podstawową w tym modelu. Ale ma kilka wad, takich jak
- Ma mały zysk
- Jest wrażliwy na nierównowagę napięcia sterującego
- V n (min) może być nadmierne
- Występuje wyciek pojemnościowy diody
Opracowano czterodiodową dwukierunkową bramkę próbkującą, ulepszając te funkcje. Ulepszono obwód dwukierunkowej bramki próbkowania, dodając dwie dodatkowe diody i dwa symetryczne napięcia + v lub –v, aby utworzyć obwód czterodiodowej dwukierunkowej bramki próbkowania, jak pokazano na rysunku.

Napięcia sterujące V C i –V C odwracają polaryzację odpowiednio diod D 3 i D 4 . Napięcia + v i –v polaryzują diody odpowiednio D 1 i D 2 . Źródło sygnału jest sprzężone z obciążeniem poprzez rezystory R 2 i przewodzące diody D 1 i D 2 . Ponieważ diody D 3 i D 4 są spolaryzowane wstecz, są otwarte i odłączają sygnały sterujące od bramki. Zatem brak równowagi w sygnałach sterujących nie wpłynie na wyjście.
Gdy przyłożone napięcia sterujące wynoszą V ni –V n , to diody D 3 i D 4 przewodzą. Punkty P 2 i P 1 są zaciśnięte na tych napięciach, co powoduje, że diody D 1 i D 2 są spolaryzowane. Teraz wynik wynosi zero.
Podczas nadawania diody D 3 i D 4 są zgaszone. Wzmocnienie A obwodu podaje
$$A = \frac{R_C}{R_C + R_2} \times \frac{R_L}{R_L + (R_s/2)}$$
Stąd wybór zastosowania napięć sterujących włącza lub wyłącza transmisję. Sygnały o obu polaryzacjach są przesyłane w zależności od wejść bramkujących.
Zastosowania bramek do pobierania próbek
Istnieje wiele zastosowań obwodów bramek próbkujących. Najpopularniejsze z nich są następujące -
- Zakresy próbkowania
- Multiplexers
- Próbkuj i utrzymuj obwody
- Przetworniki cyfrowo-analogowe
- Chopped Stabilizer Amplifiers
Wśród zastosowań obwodów bramek próbkujących dominuje obwód zakresu próbkowania. Spróbujmy mieć pojęcie na schemacie blokowym zakresu próbkowania.
Zakres próbkowania
W zakresie próbkowania wyświetlacz składa się z sekwencji próbek przebiegu wejściowego. Każda z tych próbek jest pobierana w czasie z progresywnym opóźnieniem względem pewnego punktu odniesienia w przebiegu. Jest to zasada działania zakresu próbkowania, którą przedstawiono poniżej na schemacie blokowym.

Plik ramp generator i stair case generatorgeneruje przebiegi zgodnie z zastosowanymi wejściami wyzwalającymi. Plikcomparator porównuje oba te sygnały i generuje sygnał wyjściowy, który jest następnie podawany do obwodu bramki próbkującej jako sygnał sterujący.
Tak jak i kiedy wejście sterujące jest wysokie, wejście na sampling gate jest dostarczany na wyjście i ilekroć wejście sterujące jest niskie, wejście nie jest przesyłane.
Podczas pobierania próbek są one wybierane w momentach czasowych, które są stopniowo opóźniane o równe przyrosty. Próbki składają się z impulsu, którego czas trwania jest równy czasowi trwania sterowania bramką próbkowania i którego amplituda jest określona przez wielkość sygnału wejściowego w czasie próbkowania. Wytworzona szerokość impulsu będzie mała.
Podobnie jak w przypadku modulacji impulsowej, sygnał musi być próbkowany i utrzymywany. Ale ponieważ szerokość impulsu jest mała, jest ona wzmacniana przez obwód wzmacniaczastretch a następnie podawany do obwodu kombinacji dioda-kondensator tak, aby holdsygnał, aby wypełnić interwał następnej próbki. Wyjście tego obwodu jest przekazywane dovertical deflection plates a wyjście obwodu przemiatania jest podane do horizontal deflection plates zakresu próbkowania, aby wyświetlić przebieg wyjściowy.