Przegląd generatorów podstawy czasu
Po omówieniu podstaw obwodów impulsowych, przejdźmy teraz do różnych obwodów, które generują i sobie z nimi radzą Saw tooth waves. Fala zęba piły narasta liniowo z upływem czasu i gwałtownie spada. Nazywa się to również jakoTime base signal. W rzeczywistości jest to idealna wydajność generatora podstawy czasu.
Co to jest generator podstawy czasu?
Generator elektroniczny, który generuje high frequency saw tooth waves można określić jako Time Base Generator. Można go również rozumieć jako obwód elektroniczny, który generuje napięcie wyjściowe lub przebieg prądu, którego częśćvaries linearly with time. Prędkość pozioma generatora podstawy czasu musi być stała.
Aby wyświetlić zmiany sygnału w czasie na oscyloskopie, do płytek odchylających należy przyłożyć napięcie zmieniające się liniowo w czasie. To sprawia, że sygnał przesuwa wiązkę poziomo po ekranie. Stąd napięcie nazywa sięSweep Voltage. Generatory podstawy czasu nazywane są jakoSweep Circuits.
Cechy sygnału podstawy czasu
Aby wygenerować przebieg z podstawą czasu w CRO lub kineskopie, napięcie odchylające rośnie liniowo w czasie. Generalnie używany jest generator podstawy czasu, w którym wiązka odchyla się liniowo po ekranie i powraca do punktu początkowego. Dzieje się tak podczas procesuScanning. Lampa elektronopromieniowa i kineskop działają na tej samej zasadzie. Wiązka odchyla się po ekranie z jednej strony na drugą (zwykle od lewej do prawej) i wraca do tego samego punktu.
Zjawisko to określa się jako Trace i Retrace. Odchylenie wiązki nad ekranem od lewej do prawej nosi nazwęTrace, podczas gdy powrót belki od prawej do lewej nazywany jest jako Retrace lub Fly back. Zwykle ten ślad nie jest widoczny. Proces ten odbywa się za pomocą generatora fali piłokształtnej, który ustala czas ugięcia przy pomocy zastosowanych elementów żelbetowych.
Spróbujmy zrozumieć części fali piłokształtnej.

W powyższym sygnale czas, w którym moc wzrasta liniowo, nazywany jest jako Sweep Time (TS) a czas potrzebny na powrót sygnału do wartości początkowej nazywany jest jako Restoration Time lub Fly back Time lub Retrace Time (Tr). Oba te okresy razem tworzą okres czasu jednego cyklu sygnału podstawy czasu.
W rzeczywistości ten przebieg napięcia przemiatania, który otrzymujemy, jest praktycznym wyjściem obwodu przemiatania, podczas gdy idealnym wyjściem musi być kształt fali zęba piły pokazany na powyższym rysunku.
Typy generatorów podstawy czasu
Istnieją dwa typy generatorów podstawy czasu. Oni są -
Voltage Time Base Generators - Generator podstawy czasu, który dostarcza przebieg napięcia wyjściowego, który zmienia się liniowo w czasie, nazywany jest generatorem podstawy czasu napięcia.
Current Time Base Generator - Generator podstawy czasu, który dostarcza przebieg prądu wyjściowego, który zmienia się liniowo w czasie, nazywany jest generatorem podstawy czasu prądu.
Aplikacje
Generatory podstawy czasu są używane w CRO, telewizorach, wyświetlaczach RADAR, precyzyjnych systemach pomiaru czasu i modulacji czasu.
Błędy sygnałów wobulacji
Po wygenerowaniu sygnałów przemiatania nadszedł czas na ich przesłanie. Przesyłany sygnał może podlegać odchyleniom od liniowości. Aby zrozumieć i poprawić występujące błędy, musimy posiadać wiedzę na temat najczęściej występujących błędów.
Odchylenie od liniowości wyraża się na trzy różne sposoby. Oni są -
- Błąd prędkości nachylenia lub przeciągnięcia
- Błąd przemieszczenia
- Błąd transmisji
Omówmy je szczegółowo.
Błąd prędkości nachylenia lub przemiatania (e s )
Napięcie przemiatania musi rosnąć liniowo w czasie. Szybkość zmian napięcia przemiatania w czasie musi być stała. To odchylenie od liniowości określa się jakoSlope Speed Error lub Sweep Speed Error.
Slope or Sweep speed eror e s = $ \ frac {różnica \: in \: slope \: at \: the \: początek \: i \: koniec \: of \: sweep} {początkowa \: wartość \: z \ : slope} $
$$ = \ frac {\ left (\ frac {\ mathrm {d} V_0} {\ mathrm {d} t} \ right) _ {t = 0} - \ left (\ frac {\ mathrm {d} V_0} {\ mathrm {d} t} \ right) _ {t = T_s}} {\ left (\ frac {\ mathrm {d} V_0} {\ mathrm {d} t} \ right) _ {t = 0}} $$
Błąd przemieszczenia (e d )
Ważnym kryterium liniowości jest maksymalna różnica między rzeczywistym napięciem przemiatania a liniowym przemiataniem, które przechodzi przez punkt początkowy i końcowy rzeczywistego przemiatania.
Można to zrozumieć na poniższym rysunku.
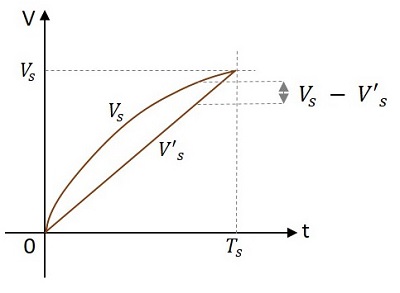
Błąd przemieszczenia ed jest zdefiniowany jako
e d = $ \ frac {(rzeczywista \: prędkość) \ thicksim (linear \: sweep \: that \: przechodzi \: początek \: i \: koniec \: of \: faktyczna \: przemiatanie)} {amplituda \: of \: sweep \: at \: the \: end \: of \: sweep \: time} $
$$ = \: \ frac {(V_s - V′_s) _ {max}} {V_s} $$
Gdzie V y jest rzeczywista przemiatania i V y jest przemiatania liniowa.
Błąd transmisji (e t )
Kiedy sygnał przemiatania przechodzi przez obwód górnoprzepustowy, wyjście zostaje odchylone od wejścia, jak pokazano poniżej.
To odchylenie jest wyrażane jako błąd transmisji.
Błąd transmisji = $ \ frac {(wejście) \: \ thicksim \ :( wyjście)} {wejście \: w \: \: koniec \: of \: the \: sweep} $
$$ e_t = \ frac {V′_s - V} {V′_s} $$
Gdzie v” s jest wejście i V y jest wyjściem na końcu cyklu, to jest w czasie t = t s .
Jeśli odchylenie od liniowości jest bardzo małe, a napięcie przemiatania można przybliżyć sumą składników liniowych i kwadratowych wt, wówczas powyższe trzy błędy są powiązane jako
$$ e_d = \ frac {e_s} {8} = \ frac {e_t} {4} $$
$$ e_s = 2e_t = 8e_d $$
Błąd prędkości przesuwu jest bardziej dominujący niż błąd przemieszczenia.