วงจรอิเล็กทรอนิกส์ - วงจรเรียงกระแส
เมื่อใดก็ตามที่จำเป็นต้องแปลงไฟ AC เป็น DC วงจรเรียงกระแสจะมาเพื่อช่วยเหลือ ไดโอดทางแยก PN ธรรมดาทำหน้าที่เป็นวงจรเรียงกระแส การให้น้ำหนักไปข้างหน้าและเงื่อนไขการให้น้ำหนักย้อนกลับของไดโอดทำให้การแก้ไข
การแก้ไข
กระแสสลับมีคุณสมบัติในการเปลี่ยนสถานะอย่างต่อเนื่อง สิ่งนี้เข้าใจได้โดยการสังเกตคลื่นไซน์ซึ่งระบุกระแสสลับ มันเพิ่มขึ้นในทิศทางบวกไปสู่ค่าบวกสูงสุดลดจากตรงนั้นเป็นปกติและอีกครั้งไปที่ส่วนลบและถึงจุดสูงสุดที่เป็นลบและกลับสู่สภาวะปกติอีกครั้งและดำเนินต่อไป
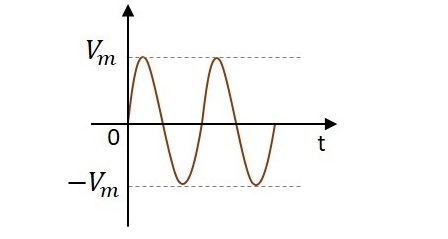
ในระหว่างการเดินทางในการก่อตัวของคลื่นเราสามารถสังเกตได้ว่าคลื่นไปในทิศทางบวกและลบ จริงๆแล้วมันเปลี่ยนแปลงอย่างสมบูรณ์และด้วยเหตุนี้ชื่อกระแสสลับ
แต่ในระหว่างกระบวนการแก้ไขกระแสสลับนี้จะเปลี่ยนเป็นกระแสตรงกระแสตรง คลื่นที่ไหลไปในทิศทางบวกและลบจนถึงตอนนั้นจะได้รับทิศทางที่ จำกัด เฉพาะทิศทางบวกเมื่อแปลงเป็น DC ดังนั้นกระแสจึงได้รับอนุญาตให้ไหลในทิศทางบวกเท่านั้นและต่อต้านในทิศทางลบเช่นเดียวกับในรูปด้านล่าง

วงจรที่ทำการแก้ไขเรียกว่าเป็น Rectifier circuit. ไดโอดถูกใช้เป็นวงจรเรียงกระแสเพื่อสร้างวงจรเรียงกระแส
ประเภทของวงจรเรียงกระแส
วงจรเรียงกระแสมีสองประเภทหลักขึ้นอยู่กับเอาต์พุต พวกเขาเป็น
- วงจรเรียงกระแสครึ่งคลื่น
- วงจรเรียงกระแสแบบเต็มคลื่น
วงจรเรียงกระแสครึ่งคลื่นจะแก้ไขครึ่งรอบบวกของแหล่งจ่ายอินพุตเท่านั้นในขณะที่วงจรเรียงกระแสเต็มคลื่นจะแก้ไขทั้งครึ่งรอบบวกและลบของแหล่งจ่ายอินพุต
วงจรเรียงกระแสครึ่งคลื่น
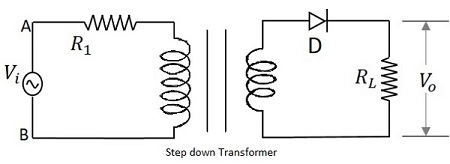
ชื่อวงจรเรียงกระแสครึ่งคลื่นระบุว่า rectification ทำเฉพาะสำหรับ halfของวงจร สัญญาณ AC จะได้รับผ่านหม้อแปลงอินพุตซึ่งจะขึ้นหรือลงตามการใช้งาน ส่วนใหญ่ใช้หม้อแปลงแบบ step down ในวงจรเรียงกระแสเพื่อลดแรงดันไฟฟ้าขาเข้า
สัญญาณอินพุตที่กำหนดให้กับหม้อแปลงจะถูกส่งผ่านไดโอดทางแยก PN ซึ่งทำหน้าที่เป็นวงจรเรียงกระแส ไดโอดนี้แปลงแรงดันไฟฟ้ากระแสสลับให้เป็นกระแสตรงแบบพัลซิ่งสำหรับครึ่งรอบบวกของอินพุตเท่านั้น ตัวต้านทานโหลดเชื่อมต่อที่ส่วนท้ายของวงจร รูปด้านล่างแสดงวงจรของวงจรเรียงกระแสครึ่งคลื่น
การทำงานของ HWR
T สัญญาณอินพุตถูกกำหนดให้กับหม้อแปลงซึ่งจะช่วยลดระดับแรงดันไฟฟ้า เอาต์พุตจากหม้อแปลงจะถูกกำหนดให้กับไดโอดซึ่งทำหน้าที่เป็นวงจรเรียงกระแส ไดโอดนี้จะเปิด (ดำเนินการ) สำหรับครึ่งรอบของสัญญาณอินพุตที่เป็นบวก ดังนั้นกระแสจะไหลในวงจรและจะมีแรงดันตกคร่อมตัวต้านทานโหลด ไดโอดจะปิด (ไม่ทำงาน) สำหรับครึ่งรอบเชิงลบและด้วยเหตุนี้เอาต์พุตสำหรับครึ่งรอบที่เป็นลบจะเป็น $ i_ {D} = 0 $ และ $ V_ {o} = 0 $
ดังนั้นเอาต์พุตจึงมีอยู่สำหรับครึ่งรอบบวกของแรงดันไฟฟ้าอินพุตเท่านั้น (ละเลยกระแสรั่วไหลย้อนกลับ) เอาท์พุทนี้จะเต้นเป็นจังหวะซึ่งถูกนำข้ามตัวต้านทานโหลด
รูปคลื่นของ HWR
รูปคลื่นอินพุตและเอาต์พุตมีดังแสดงในรูปต่อไปนี้
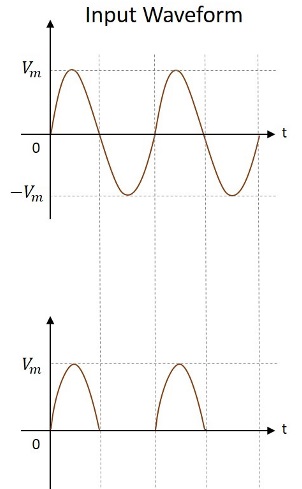
ดังนั้นเอาต์พุตของวงจรเรียงกระแสครึ่งคลื่นจึงเป็น dc แบบพัลซิ่ง ให้เราลองวิเคราะห์วงจรข้างต้นโดยทำความเข้าใจกับค่าเล็กน้อยที่ได้รับจากเอาต์พุตของวงจรเรียงกระแสครึ่งคลื่น
การวิเคราะห์ Half-Wave Rectifier
ในการวิเคราะห์วงจรเรียงกระแสครึ่งคลื่นให้เราพิจารณาสมการของแรงดันไฟฟ้าขาเข้า
$$ v_ {i} = V_ {m} \ sin \ omega t $$
$ V_ {m} $ คือค่าสูงสุดของแรงดันไฟฟ้า
ให้เราถือว่าไดโอดนั้นเหมาะ
- ความต้านทานในทิศทางไปข้างหน้ากล่าวคือในสถานะ ON คือ $ R_f $
- ความต้านทานในทิศทางย้อนกลับกล่าวคือในสถานะปิดคือ $ R_r $
ปัจจุบัน i ในไดโอดหรือตัวต้านทานโหลด $ R_L $ กำหนดโดย
$ i = I_m \ sin \ omega t \ quad สำหรับ \ quad 0 \ leq \ omega t \ leq 2 \ pi $
$ i = 0 \ quad \ quad \ quad \ quad สำหรับ \ quad \ pi \ leq \ omega t \ leq 2 \ pi $
ที่ไหน
$$ I_m = \ frac {V_m} {R_f + R_L} $$
กระแสไฟขาออก DC
ค่าเฉลี่ยปัจจุบัน $ I_ {dc} $ ได้รับจาก
$$ I_ {dc} = \ frac {1} {2 \ pi} \ int_ {0} ^ {2 \ pi} i \: d \ left (\ omega t \ right) $$
$$ = \ frac {1} {2 \ pi} \ left [\ int_ {0} ^ {\ pi} I_m \ sin \ omega t \: d \ left (\ omega t \ right) + \ int_ {0} ^ {2 \ pi} 0 \: d \ left (\ omega t \ right) \ right] $$
$$ = \ frac {1} {2 \ pi} \ left [I_m \ left \ {- \ cos \ omega t \ right \} _ {0} ^ {\ pi} \ right] $$
$$ = \ frac {1} {2 \ pi} \ left [I_m \ left \ {+ 1- \ left (-1 \ right) \ right \} \ right] = \ frac {I_m} {\ pi} = 0.318 I_m $$
เราจะได้รับแทนมูลค่า $ I_m $
$$ I_ {dc} = \ frac {V_m} {\ pi \ left (R_f + R_L \ right)} $$
ถ้า $ R_L >> R_f $ แล้ว
$$ I_ {dc} = \ frac {V_m} {\ pi R_L} = 0.318 \ frac {V_m} {R_L} $$
แรงดันขาออก DC
แรงดันเอาต์พุต DC กำหนดโดย
$$ V_ {dc} = I_ {dc} \ times R_L = \ frac {I_m} {\ pi} \ times R_L $$
$$ = \ frac {V_m \ times R_L} {\ pi \ left (R_f + R_L \ right)} = \ frac {V_m} {\ pi \ left \ {1+ \ left (R_f / R_L \ right) \ right \}} $$
ถ้า $ R_L >> R_f $ แล้ว
$$ V_ {dc} = \ frac {V_m} {\ pi} = 0.318 V_m $$
RMS กระแสและแรงดัน
ค่าของกระแส RMS กำหนดโดย
$$ I_ {rms} = \ left [\ frac {1} {2 \ pi} \ int_ {0} ^ {2 \ pi} i ^ {2} d \ left (\ omega t \ right) \ right] ^ {\ frac {1} {2}} $$
$$ I_ {rms} = \ left [\ frac {1} {2 \ pi} \ int_ {0} ^ {2 \ pi} I_ {m} ^ {2} \ sin ^ {2} \ โอเมก้า t \: d \ left (\ omega t \ right) + \ frac {1} {2 \ pi} \ int _ {\ pi} ^ {2 \ pi} 0 \: d \ left (\ omega t \ right) \ right] ^ {\ frac {1} {2}} $$
$$ = \ left [\ frac {I_ {m} ^ {2}} {2 \ pi} \ int_ {0} ^ {\ pi} \ left (\ frac {1- \ cos 2 \ omega t} {2 } \ right) d \ left (\ omega t \ right) \ right] ^ {\ frac {1} {2}} $$
$$ = \ left [\ frac {I_ {m} ^ {2}} {4 \ pi} \ left \ {\ left (\ omega t \ right) - \ frac {\ sin 2 \ omega t} {2} \ right \} _ {0} ^ {\ pi} \ right] ^ {\ frac {1} {2}} $$
$$ = \ left [\ frac {I_ {m} ^ {2}} {4 \ pi} \ left \ {\ pi - 0 - \ frac {\ sin 2 \ pi} {2} + \ sin 0 \ right \} \ right] ^ {\ frac {1} {2}} $$
$$ = \ left [\ frac {I_ {m} ^ {2}} {4 \ pi} \ right] ^ {\ frac {1} {2}} = \ frac {I_m} {2} $$
$$ = \ frac {V_m} {2 \ left (R_f + R_L \ right)} $$
แรงดันไฟฟ้า RMS ตลอดโหลดคือ
$$ V_ {rms} = I_ {rms} \ times R_L = \ frac {V_m \ times R_L} {2 \ left (R_f + R_L \ right)} $$
$$ = \ frac {V_m} {2 \ left \ {1+ \ left (R_f / R_L \ right) \ right \}} $$
ถ้า $ R_L >> R_f $ แล้ว
$$ V_ {rms} = \ frac {V_m} {2} $$
ประสิทธิภาพของวงจรเรียงกระแส
วงจรใด ๆ ต้องมีประสิทธิภาพในการทำงานเพื่อให้ได้ผลลัพธ์ที่ดีขึ้น ในการคำนวณประสิทธิภาพของวงจรเรียงกระแสครึ่งคลื่นจะต้องพิจารณาอัตราส่วนของกำลังขับต่อกำลังไฟฟ้าเข้า
ประสิทธิภาพของวงจรเรียงกระแสถูกกำหนดเป็น
$$ \ eta = \ frac {dcpower \: \: ส่งแล้ว \: \: ถึง \: \: the \: \: load} {acinput \: \: power \: \: from \: \: transformer \: \ : secondary} = \ frac {P_ {ac}} {P_ {dc}} $$
ตอนนี้
$$ P_ {dc} = \ left ({I_ {dc}} \ right) ^ 2 \ times R_L = \ frac {I_m R_L} {\ pi ^ 2} $$
เพิ่มเติม
$$ P_ {ac} = P_a + P_r $$
ที่ไหน
$ P_a = พลังงาน \: กระจาย \: ที่ \: ที่ \: ทางแยก \: ของ \: ไดโอด $
$$ = I_ {rms} ^ {2} \ times R_f = \ frac {I_ {m} ^ {2}} {4} \ times R_f $$
และ
$$ P_r = power \: dissipated \: in \: the \: load \: resistance $$
$$ = I_ {rms} ^ {2} \ times R_L = \ frac {I_ {m} ^ {2}} {4} \ times R_L $$
$$ P_ {ac} = \ frac {I_ {m} ^ {2}} {4} \ times R_f + \ frac {I_ {m} ^ {2}} {4} \ times R_L = \ frac {I_ {m } ^ {2}} {4} \ left (R_f + R_L \ right) $$
จากทั้งนิพจน์ของ $ P_ {ac} $ และ $ P_ {dc} $ เราสามารถเขียนได้
$$ \ eta = \ frac {I_ {m} ^ {2} R_L / \ pi ^ 2} {I_ {m} ^ {2} \ left (R_f + R_L \ right) / 4} = \ frac {4} {\ pi ^ 2} \ frac {R_L} {\ left (R_f + R_L \ right)} $$
$$ = \ frac {4} {\ pi ^ 2} \ frac {1} {\ left \ {1+ \ left (R_f / R_L \ right) \ right \}} = \ frac {0.406} {\ left \ {1+ \ left (R_f / R_L \ right) \ right \}} $$
ประสิทธิภาพของวงจรเรียงกระแสร้อยละ
$$ \ eta = \ frac {40.6} {\ lbrace1 + \ lgroup \: R_ {f} / R_ {L} \ rgroup \ rbrace} $$
ในทางทฤษฎีค่าสูงสุดของประสิทธิภาพวงจรเรียงกระแสของวงจรเรียงกระแสครึ่งคลื่นคือ 40.6% เมื่อ $ R_ {f} / R_ {L} = 0 $
นอกจากนี้ประสิทธิภาพอาจคำนวณได้ด้วยวิธีต่อไปนี้
$$ \ eta = \ frac {P_ {dc}} {P_ {ac}} = \ frac {\ left (I_ {dc} \ right) ^ 2R_L} {\ left (I_ {rms} \ right) ^ 2R_L} = \ frac {\ left (V_ {dc} / R_L \ right) ^ 2R_L} {\ left (V_ {rms} / R_L \ right) ^ 2R_L} = \ frac {\ left (V_ {dc} \ right) ^ 2} {\ left (V_ {rms} \ right) ^ 2} $$
$$ = \ frac {\ left (V_m / \ pi \ right) ^ 2} {\ left (V_m / 2 \ right) ^ 2} = \ frac {4} {\ pi ^ 2} = 0.406 $$
$$ = 40.6 \% $$
Ripple Factor
เอาต์พุตที่แก้ไขมีส่วนประกอบ AC จำนวนหนึ่งอยู่ในนั้นในรูปแบบของระลอกคลื่น สิ่งนี้เข้าใจได้โดยการสังเกตรูปคลื่นเอาท์พุตของวงจรเรียงกระแสครึ่งคลื่น เพื่อให้ได้ dc ที่บริสุทธิ์เราต้องมีแนวคิดเกี่ยวกับส่วนประกอบนี้
ปัจจัยการกระเพื่อมให้ความกระเพื่อมของเอาต์พุตที่แก้ไข แสดงโดยy. สิ่งนี้สามารถกำหนดเป็นอัตราส่วนของค่าประสิทธิผลของส่วนประกอบ ac ของแรงดันหรือกระแสต่อค่าโดยตรงหรือค่าเฉลี่ย
$$ \ gamma = \ frac {ripple \: voltage} {dc \: voltage} = \ frac {rms \: value \: of \ :Followonent} {dcvalue \: of \: wave} = \ frac {\ left ( V_r \ right) _ {rms}} {v_ {dc}} $$
ที่นี่
$$ \ left (V_r \ right) _ {rms} = \ sqrt {V_ {rms} ^ {2} -V_ {dc} ^ {2}} $$
ดังนั้น,
$$ \ gamma = \ frac {\ sqrt {V_ {rms} ^ {2} -V_ {dc} ^ {2}}} {V_ {dc}} = \ sqrt {\ left (\ frac {V_ {rms} } {V_ {dc}} \ right) ^ 2-1} $$
ตอนนี้
$$ V_ {rms} = \ left [\ frac {1} {2 \ pi} \ int_ {0} ^ {2 \ pi} V_ {m} ^ {2} \ sin ^ 2 \ โอเมก้า t \: d \ ซ้าย (\ omega t \ right) \ right] ^ {\ frac {1} {2}} $$
$$ = V_m \ left [\ frac {1} {4 \ pi} \ int_ {0} ^ {\ pi} \ left (1- \ cos2 \: \ omega t \ right) d \ left (\ omega t \ ขวา) \ right] ^ {\ frac {1} {2}} = \ frac {V_m} {2} $$
$$ V_ {dc} = V_ {av} = \ frac {1} {2 \ pi} \ left [\ int_ {0} ^ {\ pi} V_m \ sin \ omega t \: d \ left (\ โอเมก้า t \ right) + \ int_ {0} ^ {2 \ pi} 0.d \ left (\ omega t \ right) \ right] $$
$$ = \ frac {V_m} {2 \ pi} \ left [- \ cos \ omega t \ right] _ {0} ^ {\ pi} = \ frac {V_m} {\ pi} $$
$$ \ gamma = \ sqrt {\ left [\ left \ {\ frac {\ left (V_m / 2 \ right)} {\ left (V_m / \ pi \ right)} \ right \} ^ 2-1 \ right ]} = \ sqrt {\ left \ {\ left (\ frac {\ pi} {2} \ right) ^ 2-1 \ right \}} = 1.21 $$
ปัจจัยการกระเพื่อมยังถูกกำหนดให้เป็น
$$ \ gamma = \ frac {\ left (I_r \ right) _ {rms}} {I_ {dc}} $$
เนื่องจากค่าของปัจจัยการกระเพื่อมที่มีอยู่ในวงจรเรียงกระแสครึ่งคลื่นคือ 1.21 หมายความว่าจำนวน ac ที่มีอยู่ในเอาต์พุตคือ $ 121 \% $ ของแรงดันไฟฟ้ากระแสตรง
ระเบียบข้อบังคับ
กระแสไฟฟ้าผ่านโหลดอาจแตกต่างกันไปขึ้นอยู่กับความต้านทานต่อโหลด แต่ถึงแม้จะอยู่ในสภาพเช่นนี้เราคาดหวังว่าแรงดันไฟฟ้าขาออกของเราซึ่งนำมาใช้กับตัวต้านทานโหลดนั้นจะคงที่ ดังนั้นแรงดันไฟฟ้าของเราจำเป็นต้องได้รับการควบคุมแม้ในสภาวะโหลดที่แตกต่างกัน
รูปแบบของแรงดันเอาต์พุต DC ที่มีการเปลี่ยนแปลงของกระแสโหลด DC ถูกกำหนดให้เป็น Regulation. ระเบียบเปอร์เซ็นต์คำนวณได้ดังนี้
$$ เปอร์เซ็นต์ \: ระเบียบ = \ frac {V_ {no \: load} -V_ {full \: load}} {V_ {full \: load}} \ times 100 \% $$
การควบคุมเปอร์เซ็นต์ที่ต่ำกว่าจะเป็นแหล่งจ่ายไฟที่ดีกว่า แหล่งจ่ายไฟในอุดมคติจะมีการควบคุมเป็นศูนย์เปอร์เซ็นต์
ปัจจัยการใช้หม้อแปลง
กำลังไฟฟ้ากระแสตรงที่จะส่งไปยังโหลดในวงจรเรียงกระแสจะกำหนดพิกัดของหม้อแปลงที่ใช้ในวงจร
ดังนั้นปัจจัยการใช้หม้อแปลงจึงถูกกำหนดเป็น
$$ TUF = \ frac {dcpower \: to \: be \: ส่ง \: ถึง \: the \: load} {acrating \: of \: the \: transformer \: secondary} $$
$$ = \ frac {P_ {dc}} {P_ {ac \ left (คะแนน \ right)}} $$
ตามทฤษฎีของหม้อแปลงแรงดันไฟฟ้าที่กำหนดของทุติยภูมิจะเป็น
$$ V_m / \ sqrt {2} $$
แรงดันไฟฟ้า RMS ที่ไหลผ่านจะเป็น
$$ I_m / 2 $$
ดังนั้น
$$ TUF = \ frac {\ left (I_m / \ pi \ right) ^ 2 \ times R_L} {\ left (V_m / \ sqrt {2} \ right) \ times \ left (I_m / 2 \ right)} $ $
แต่
$$ V_m = I_m \ left (R_f + R_L \ right) $$
ดังนั้น
$$ TUF = \ frac {\ left (I_m / \ pi \ right) ^ 2 \ times R_L} {\ left \ {I_m \ left (R_f + R_L \ right) / \ sqrt {2} \ right \} \ times \ left (I_m / 2 \ right)} $$
$$ = \ frac {2 \ sqrt {2}} {\ pi ^ 2} \ times \ frac {R_L} {\ left (R_f + R_L \ right)} $$
$$ = \ frac {2 \ sqrt {2}} {\ pi ^ 2} = 0.287 $$
แรงดันไฟฟ้าผกผันสูงสุด
ไดโอดเมื่อเชื่อมต่อแบบไบแอสย้อนกลับควรทำงานภายใต้ระดับแรงดันไฟฟ้าที่ควบคุมได้ หากเกินแรงดันไฟฟ้าที่ปลอดภัยไดโอดจะเสียหาย ดังนั้นจึงเป็นสิ่งสำคัญมากที่จะต้องรู้เกี่ยวกับแรงดันไฟฟ้าสูงสุดนั้น
แรงดันไฟฟ้าผกผันสูงสุดที่ไดโอดสามารถทนได้โดยไม่ถูกทำลายเรียกว่า as Peak Inverse Voltage. ในระยะสั้นPIV.
ที่นี่ PIV คืออะไรนอกจาก Vm
ฟอร์มแฟกเตอร์
สิ่งนี้สามารถเข้าใจได้ว่าเป็นค่าเฉลี่ยทางคณิตศาสตร์ของค่าสัมบูรณ์ของทุกจุดบนรูปคลื่น form factorถูกกำหนดให้เป็นอัตราส่วนของค่า RMS ต่อค่าเฉลี่ย แสดงโดยF.
$$ F = \ frac {rms \: value} {average \: value} = \ frac {I_m / 2} {I_m / \ pi} = \ frac {0.5I_m} {0.318I_m} = 1.57 $$
ปัจจัยสูงสุด
ต้องพิจารณาค่าของจุดสูงสุดในระลอกเพื่อให้ทราบว่าการแก้ไขมีประสิทธิภาพเพียงใด มูลค่าของปัจจัยสูงสุดยังเป็นข้อพิจารณาที่สำคัญPeak factor ถูกกำหนดให้เป็นอัตราส่วนของค่าสูงสุดต่อค่า RMS
ดังนั้น
$$ Peak Factor = \ frac {Peak \: value} {rms \: value} = \ frac {V_m} {V_m / 2} = 2 $$
ทั้งหมดนี้เป็นพารามิเตอร์สำคัญที่ต้องพิจารณาในขณะที่ศึกษาเกี่ยวกับวงจรเรียงกระแส