Uydu İletişimi - Hızlı Kılavuz
Genel anlamda bir satelliteuzayda daha büyük bir nesnenin etrafında dönen daha küçük bir nesnedir. Örneğin ay, dünyanın doğal bir uydusudur.
Biz biliyoruz ki Communicationiki veya daha fazla kuruluş arasında herhangi bir ortam veya kanal aracılığıyla bilgi alışverişi (paylaşımı) anlamına gelir. Başka bir deyişle, bilgi gönderme, alma ve işlemekten başka bir şey değildir.
İletişim, herhangi iki yer istasyonu arasında bir uydu aracılığıyla gerçekleşirse, buna satellite communication. Bu iletişimde elektromanyetik dalgalar taşıyıcı sinyaller olarak kullanılır. Bu sinyaller, ses, ses, video gibi bilgileri veya yer ile uzay arasında veya tersi yönde herhangi bir diğer verileri taşır.
Sovyetler Birliği, 1957'de dünyanın ilk yapay uydusu olan Sputnik 1'i fırlatmıştı. Hindistan, yaklaşık 18 yıl sonra, 1975'te Aryabhata adlı yapay uyduyu da fırlattı.
Uydu Haberleşmesi İhtiyacı
Aşağıdaki iki tür yayılma, daha önce belirli bir mesafeye kadar iletişim için kullanılır.
Ground wave propagation- Yer dalgası yayılımı, 30MHz'e kadar olan frekanslar için uygundur. Bu iletişim yöntemi, dünyanın troposfer koşullarından yararlanır.
Sky wave propagation - Bu tür iletişim için uygun bant genişliği genel olarak 30-40 MHz arasındadır ve dünyanın iyonosfer özelliklerini kullanır.
Maksimum sıçrama veya istasyon mesafesi, yalnızca hem yer dalgası yayılmasında hem de gökyüzü dalgası yayılmasında 1500KM ile sınırlıdır. Uydu iletişimi bu sınırlamanın üstesinden gelir. Bu yöntemde uydular,communication for long distanceski bu görüş alanının çok ötesindedir.
Uydular yeryüzünün belirli bir yüksekliğine konumlandıklarından, haberleşme herhangi iki yer istasyonu arasında uydu aracılığıyla kolayca gerçekleşir. Böylece, dünyanın eğriliği nedeniyle iki yer istasyonu arasındaki iletişim sınırlamasının üstesinden gelir.
Bir Uydu Nasıl Çalışır?
Bir satellitebelirli bir yolda başka bir bedenin etrafında hareket eden bir bedendir. Bir iletişim uydusu, uzayda bir mikrodalga tekrarlayıcı istasyonundan başka bir şey değildir. İnternet uygulamaları ile birlikte telekomünikasyon, radyo ve televizyonda faydalıdır.
Bir repeateralınan sinyalin gücünü artıran ve daha sonra ileten bir devredir. Ancak, bu tekrarlayıcı birtransponder. Bu, iletilen sinyalin frekans bandını alınan sinyalden değiştirdiği anlamına gelir.
Sinyalin boşluğa gönderildiği frekansa Uplink frequency. Benzer şekilde, sinyalin transponder tarafından gönderildiği frekansaDownlink frequency. Aşağıdaki şekil bu kavramı açıkça göstermektedir.
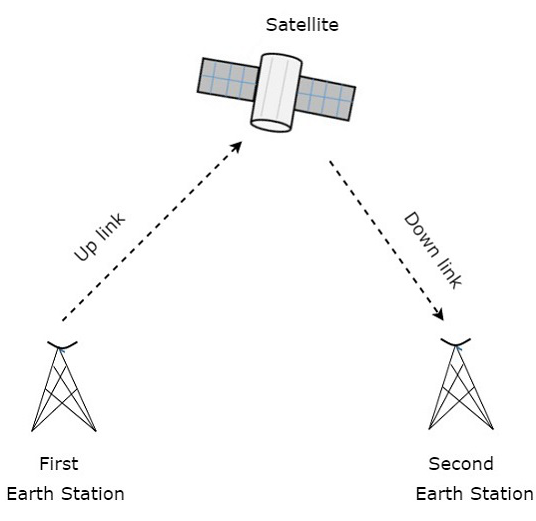
İlk yer istasyonundan uyduya bir kanaldan sinyal iletimi denir. uplink. Benzer şekilde, sinyalin uydudan ikinci yer istasyonuna bir kanal aracılığıyla iletilmesine de denir.downlink.
Uplink frequencyilk yer istasyonunun uydu ile haberleştiği frekanstır. Uydu aktarıcısı bu sinyali başka bir frekansa dönüştürür ve ikinci yer istasyonuna gönderir. Bu frekansaDownlink frequency. Benzer şekilde, ikinci yer istasyonu da birincisi ile iletişim kurabilir.
Uydu haberleşme süreci bir yer istasyonunda başlar. Burada, dünyanın etrafında bir yörüngede bulunan bir uydudan sinyalleri iletmek ve almak için bir kurulum tasarlanmıştır. Yer istasyonları, bilgileri uydulara yüksek güçlü, yüksek frekanslı (GHz aralığı) sinyaller şeklinde gönderir.
Uydular, sinyalleri alır ve uydunun kapsama alanındaki diğer yer istasyonları tarafından alındıkları yere geri iletirler. Uydufootprint uydudan yararlı bir güç sinyali alan alandır.
Uydu Haberleşmesinin Artıları ve Eksileri
Bu bölümde uydu haberleşmesinin avantaj ve dezavantajlarına bir göz atalım.
Aşağıdakiler advantages uydu iletişimini kullanma:
Kapsama alanı karasal sistemlerden daha fazladır
Dünyanın her köşesi kaplanabilir
İletim maliyeti kapsama alanından bağımsızdır
Daha fazla bant genişliği ve yayın imkanı
Aşağıdakiler disadvantages uydu iletişimini kullanma -
Uyduların yörüngeye fırlatılması maliyetli bir süreçtir.
Uydu sistemlerinin yayılma gecikmesi, geleneksel karasal sistemlerden daha fazladır.
Bir uydu sisteminde herhangi bir problem oluşursa, onarım faaliyetlerini sağlamak zordur.
Boş alan kaybı daha fazladır
Frekans tıkanıklığı olabilir.
Uydu Haberleşmesi Uygulamaları
Uydu iletişimi günlük hayatımızda hayati bir rol oynar. Uydu haberleşmesi uygulamaları aşağıdadır -
Radyo yayını ve sesli iletişim
Direct To Home (DTH) gibi TV yayını
Veri aktarımı için İnternet bağlantısı sağlama, GPS uygulamaları, İnternette gezinme vb. İnternet uygulamaları.
Askeri uygulamalar ve seyrüsefer
Uzaktan algılama uygulamaları
Hava durumu izleme ve Tahmin
Dünyanın etrafında dönen uydunun yolunun şu adla bilindiğini biliyoruz: orbit. Bu yol matematiksel gösterimle gösterilebilir. Yörünge mekaniği, yörüngelerde bulunan uyduların hareketinin incelenmesidir. Böylece yörünge hareketi bilgisi ile uzay işlemlerini rahatlıkla anlayabiliriz.
Yörünge Elemanları
Yörünge unsurları, uyduların yörünge hareketini tanımlamaya yardımcı olan parametrelerdir. Aşağıdakilerorbital elements.
- Yarı büyük eksen
- Eccentricity
- Ortalama anormallik
- Perigee argümanı
- Inclination
- Yükselen düğümün sağ yükselişi
Yukarıdaki altı yörünge öğesi, dünya uydularının yörüngesini tanımlar. Bu nedenle, yörünge elemanlarının değerlerine göre bir uyduyu diğer uydulardan ayırt etmek kolaydır.
Yarı büyük eksen
Uzunluğu Semi-major axis (a)Uydunun yörüngesinin boyutunu tanımlar. Ana eksenin yarısıdır. Bu merkezden elipsin kenarına odaklanır. Yani, yörüngenin en uzak iki noktasındaki bir yörüngenin yarıçapıdır.
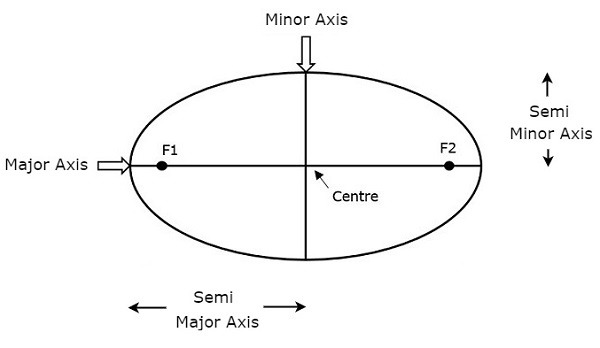
Hem yarı büyük eksen hem de yarı küçük eksen yukarıdaki şekilde gösterilmektedir. Yarı uzunlukmajor axis (a) sadece uydunun yörüngesinin boyutunu değil, aynı zamanda devrimin zaman dilimini de belirler.
Dairesel yörünge özel bir durum olarak kabul edilirse, yarı büyük eksenin uzunluğu eşit olacaktır. radius bu dairesel yörüngenin.
Eksantriklik
Değeri Eccentricity (e)uydunun yörüngesinin şeklini düzeltir. Bu parametre, yörünge şeklinin mükemmel bir daireden sapmasını gösterir.
Eliptik bir yörüngenin yarı büyük eksen ve yarı küçük eksen uzunlukları a & b ise, matematiksel ifade eccentricity (e) olacak
$$e = \frac{\sqrt{a^2 - b^2}}{a}$$
Dairesel bir yörüngenin eksantrikliğinin değeri zero, çünkü hem a hem de b eşittir. Oysa eliptik bir yörüngenin eksantrikliğinin değeri sıfır ile bir arasındadır.
Aşağıdaki figure farklı eksantriklik (e) değerleri için çeşitli uydu yörüngelerini gösterir
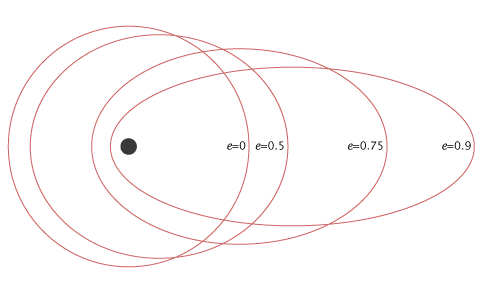
Yukarıdaki şekilde, sıfırın eksantriklik (e) değerine karşılık gelen uydu yörüngesi, dairesel bir yörüngedir. Ve kalan üç uydu yörüngesi, 0.5, 0.75 ve 0.9 eksantriklik (e) değerlerine karşılık gelen eliptiktir.
Ortalama Anomali
Bir uydu için Dünya'ya en yakın olan nokta Perigee olarak bilinir. Mean anomaly (M), perige ile ilgili olarak uydunun açısal konumunun ortalama değerini verir.
Yörünge daireselse, Ortalama anormallik uydunun yörüngedeki açısal konumunu verir. Ancak yörünge eliptik ise, kesin konumun hesaplanması çok zordur. O sırada, ortalama anormallik bir ara adım olarak kullanılır.
Perigee Argümanı
Uydu yörüngesi, ekvator düzlemini iki noktadan keser. İlk nokta olarak adlandırılırdescending nodeuydunun kuzey yarımküreden güney yarımküreye geçtiği yer. İkinci nokta olarak adlandırılırascending nodeuydunun güney yarımküreden kuzey yarımküreye geçtiği yer.
Argument of perigee (ω)yükselen düğüm ve perigee arasındaki açıdır. Hem perigee hem de artan düğüm aynı noktada mevcutsa, perigee argümanı sıfır derece olacaktır.
Perigee argümanı, uydu hareketi yönünde dünyanın merkezinde yörünge düzleminde ölçülür.
Eğim
Yörünge düzlemi ile dünyanın ekvator düzlemi arasındaki açı olarak bilinir inclination (i). Doğudan kuzeye yön ile yükselen düğümde ölçülür. Dolayısıyla eğim, dünyanın ekvatorunu referans alarak yörüngenin yönünü tanımlar.

Eğim açısına göre dört tür yörünge vardır.
Equatorial orbit - Eğim açısı sıfır derece veya 180 derecedir.
Polar orbit - Eğim açısı 90 derecedir.
Prograde orbit - Eğim açısı sıfır ile 90 derece arasındadır.
Retrograde orbit - Eğim açısı 90 ile 180 derece arasındadır.
Yükselen düğümün Sağ Açıklığı
Biz biliyoruz ki ascending node uydunun güney yarımküreden kuzey yarımküreye giderken ekvator düzlemini geçtiği noktadır.
Yükselen düğümün Sağ Yükselişi (Ω)Koç çizgisi ile ekvator düzleminde doğu yönüne doğru yükselen düğüm arasındaki açıdır. Koç, aynı zamanda vernal ve ekinoks olarak da adlandırılır.
Uydu ground tracktam yörüngesinin altında yer alan Dünya yüzeyindeki yoldur. Bir uydunun yer rotası, yörünge elemanlarının değerlerine bağlı olarak bir dizi farklı biçim alabilir.
Orbital Denklemler
Bu bölümde yörünge hareketiyle ilgili denklemleri tartışalım.
Uyduya etki eden kuvvetler
Bir uydu, dünyanın etrafında döndüğünde, dünyanın çekim kuvveti nedeniyle dünyadan bir çekme kuvvetine maruz kalır. Bu kuvvet olarak bilinirCentripetal force(F 1 ) çünkü bu kuvvet uyduyu ona doğru yöneltir.
Matematiksel olarak Centripetal force(F 1 ) yeryüzü nedeniyle uyduya etki eden şu şekilde yazılabilir:
$$F_{1} = \frac{GMm}{R^2} $$
Nerede,
Gevrensel yerçekimi sabitidir ve 6.673 x 10-11 N ∙ m 2 / kg 2'ye eşittir .
Mdünyanın kütlesi olup 5.98 x 10 24 Kg'ye eşittir .
m uydunun kütlesidir.
R uydudan Dünya'nın merkezine olan mesafedir.
Bir uydu, dünyanın etrafında döndüğünde, yerçekimi kuvvetleri nedeniyle güneşten ve aydan bir çekme kuvvetine maruz kalır. Bu kuvvet olarak bilinirCentrifugal force(F 2 ) çünkü bu kuvvet uyduyu dünyadan uzaklaştırır.
Matematiksel olarak Centrifugal force(F 2 ) uydu üzerinde hareket eden şu şekilde yazılabilir:
$$F_{2} = \frac{mv^2}{R} $$
Nerede, v uydunun yörünge hızıdır.
Yörünge Hızı
Uydunun yörünge hızı, uydunun dünya etrafında döndüğü hızdır. Uydu yörüngesinden sapmaz ve hem Merkezcil hem de Merkezkaç kuvvetleri olduğunda bu yörüngede belirli bir hızla hareket eder.balance herbiri.
Yani, equateMerkezcil kuvvet (F 1 ) ve Merkezkaç kuvveti (F 2 ).
$$\frac{GMm}{R^2} = \frac{mv^2}{R}$$
$$= > \frac{GM}{R} = v^2$$
$$= > v = \sqrt{\frac{GM}{R}}$$
bu yüzden orbital velocity uydunun
$$v = \sqrt{\frac{GM}{R}}$$
Nerede,
Gyerçekimi sabitidir ve 6.673 x 10-11 N ∙ m 2 / kg 2'ye eşittir .
Mdünyanın kütlesi olup 5.98 x 10 24 Kg'ye eşittir .
R uydudan Dünya'nın merkezine olan mesafedir.
Yani yörünge hızı esas olarak depends G & M sabit olduğundan, uydudan Dünya'nın merkezine (R) olan mesafede.
Uydunun dünyanın etrafında döndüğünü biliyoruz, bu da tıpkı dünyanın güneş etrafında dönmesine benzer. Dolayısıyla, dünyaya ve onun güneş etrafındaki hareketine uygulanan ilkeler, uydu ve onun dünya etrafındaki hareketi için de geçerlidir.
Birçok bilim adamı, eski zamanlardan beri farklı türlerde teoriler vermiştir. Ama yalnızcaJohannes Kepler (1571-1630), dünyanın etrafında hareket eden bir uydunun prensibini tanımlayan en çok kabul gören bilim adamlarından biriydi.
Kepler, tüm uydu haberleşme teorisini ve gözlemlerini değiştiren üç kanun formüle etti. Bunlar halk arasındaKepler’s laws. Bunlar, uzaydaki hareketi görselleştirmek için faydalıdır.
Kepler'in Birinci Yasası
Kepler'in ilk yasası, bir uydunun birincil (dünya) etrafında izlediği yolun bir ellipse. Bu elipsin, aşağıdaki şekilde gösterildiği gibi iki odak noktası (odak) F1 ve F2 vardır. Dünyanın kütle merkezi her zaman elipsin iki odak noktasından birinde mevcut olacaktır.
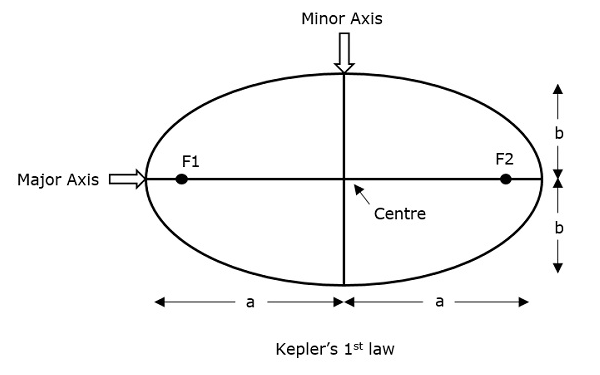
Nesnenin merkezinden eliptik yolundaki bir noktaya olan uzaklık dikkate alınırsa, bir elipsin merkezden en uzak noktası olarak adlandırılır. apogee merkezden bir elipsin en kısa noktasına perigee.
Eccentricity "e" bu sistemin şu şekilde yazılabilir:
$$e = \frac{\sqrt{a^2 - b^2}}{a}$$
Nerede, a & b sırasıyla elipsin yarı büyük eksen ve yarı küçük eksen uzunluklarıdır.
Bir ... için elliptical path, eksantrikliğin (e) değeri her zaman 0 ile 1 arasındadır, yani $0$ < $e$ < $1$, çünkü a, b'den büyüktür. Diyelim ki, eksantrikliğin (e) değeri sıfırsa, yol artık eliptik bir şekil olmayacak, bunun yerine dairesel bir şekle dönüştürülecektir.
Kepler'in İkinci Yasası
Kepler'in ikinci yasası, eşit zaman aralıkları için areauydunun kapladığı yer dünyanın kütle merkezine göre aynı olacaktır. Bu, aşağıdaki şekle bakılarak anlaşılabilir.
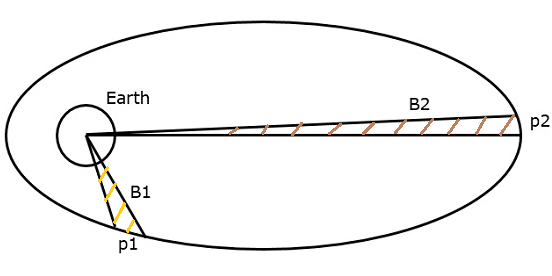
Varsayalım, uydunun p1 ve p2 mesafelerini aynı zaman aralığında kapsadığını. Daha sonra, bu iki durumda uydunun kapladığı B1 ve B2 alanları eşittir.
Kepler'in Üçüncü Yasası
Kepler'in üçüncü yasası, bir eliptik yörüngenin periyodik zamanının karesinin, yarı büyük eksen uzunluğunun küpüyle orantılı olduğunu belirtir. Mathematicallyaşağıdaki gibi yazılabilir -
$$T^2\:\alpha\:a^3$$
$$=> T^2=\left(\frac{4\pi ^2}{\mu }\right) a^3$$
Nerede, $\frac{4\pi^2}{\mu}$ orantılılık sabiti.
$\mu$Kepler sabitidir ve değeri 3.986005 x 10 14 m 3 / sn 2'ye eşittir
$$1 = \left(\frac{2\pi}{T}\right)^2\left(\frac{a^2}{\mu}\right)$$
$$1 = n^2\left(\frac{a^3}{\mu}\right)$$
$$=> a^3 = \frac{\mu}{n^2}$$
Nerede, ‘n’ Radyan / saniye cinsinden uydunun ortalama hareketidir.
Note- Bir uydu dünyanın etrafında döndüğünde, yerçekimi kuvveti olan dünyadan bir çekme kuvvetine maruz kalır. Benzer şekilde, güneşten ve aydan başka bir çekme kuvveti yaşar. Bu nedenle, bir uydunun kendisini yörüngesinde tutmak için bu iki kuvveti dengelemesi gerekir.
Uydu, boşlukta bırakıldıktan sonra ilgili yörüngeye uygun şekilde yerleştirilmelidir. Belirli bir şekilde döner ve bilimsel, askeri veya ticari amaçlarına hizmet eder. Yeryüzüne göre uydulara atanan yörüngeler,Earth Orbits. Bu yörüngelerde bulunan uydular şöyle adlandırılır:Earth Orbit Satellites.
İhtiyaca göre uydu için uygun bir yörünge seçmeliyiz. Örneğin, uydu yerleştirilmişselower orbit, o zaman dünyayı dolaşmak daha az zaman alır ve yerleşik bir kamerada daha iyi çözünürlük olacaktır. Benzer şekilde, uydu yerleştirilirsehigher orbit, o zaman dünyanın etrafında dolaşmak daha fazla zaman alır ve bir seferde daha fazla dünyanın yüzeyini kaplar.
Aşağıdakiler üç önemli types of Earth Orbit satellites -
- Jeosenkron Dünya Yörünge Uyduları
- Orta Dünya Yörünge Uyduları
- Düşük Dünya Yörüngeli Uydular
Şimdi, her türden dünya yörüngesindeki uyduları tek tek tartışalım.
Yere Eşzamanlı Dünya Yörüngesi
Jeo-eşzamanlı bir Dünya Yörüngesi (GEO) Satellite bir rakımda bulunan 22,300Dünyanın mil üzerinde. Bu yörünge, bir yan gerçek gün (yani 23 saat 56 dakika) ile senkronize edilir. Bu yörünge eğim ve eksantrikliğe sahip olabilir.
Dairesel olmayabilir. Bu yörünge, dünyanın kutuplarına doğru eğilebilir. Ancak, Dünya'dan bakıldığında hareketsiz görünür. Bu uydular uydu Televizyonu için kullanılmaktadır.
Aynı jeo-eşzamanlı yörünge, eğer daireselse ve ekvator düzlemindeyse, o zaman denir Geostationary orbit. Bu Uydular, Dünya Ekvatorunun 35.900 km yukarısına (Geosynchronous ile aynı) yerleştirilir ve dünyanın yönüne göre (batıdan doğuya) dönmeye devam ederler.
Bu yörüngelerde bulunan uydular, dünyanınki ile aynı açısal hıza sahiptir. Dolayısıyla bu uydular şu şekilde kabul edilir:stationary Dünya ile ilgili olarak, bunlar Dünya'nın dönüşüyle eşzamanlıdır.
advantage Sabit yörünge, uyduların konumunu bulmak için antenleri izlemeye gerek olmamasıdır.
Geostationary Earth Orbit Uyduları hava tahmini, uydu TV, uydu radyo ve diğer küresel iletişim türleri için kullanılır.
Aşağıdaki şekil, Jeo-eşzamanlı ve Jeo-sabit yörüngeler arasındaki farkı göstermektedir. Dönme ekseni, Dünya'nın hareketini gösterir.
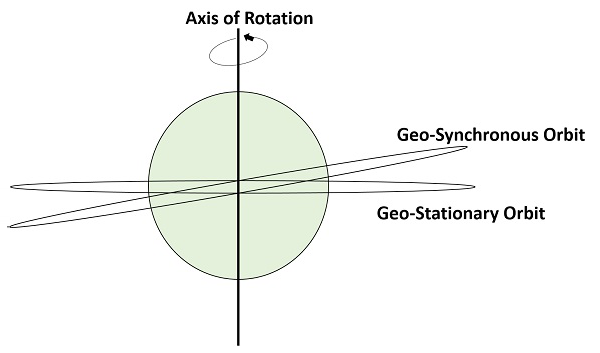
Note- Her Geostationary yörünge, Geo-syncous yörüngedir. Ancak, tersinin doğru olmasına gerek yoktur.
Orta Dünya Yörünge Uyduları
Orta Dünya Yörüngesi (MEO) uydular yaklaşık olarak 8000 milesDünya yüzeyinden. Bir MEO uydusundan iletilen sinyaller daha kısa bir mesafeye gider. Bundan dolayı, alıcı taraftaki sinyal gücü artar. Bu, alıcı uçta daha küçük ve hafif alıcı terminallerin kullanılabileceğini gösterir.
Transmission delaybir sinyalin bir uyduya gidip bir alıcı istasyona geri dönmesi için geçen süre olarak tanımlanabilir. Bu durumda, daha az iletim gecikmesi vardır. Çünkü sinyal, MEO uydusundan daha kısa bir mesafe kat eder.
İçin real-time communications, iletim gecikmesi ne kadar kısa olursa iletişim sistemi o kadar iyi olur. Örnek olarak, bir GEO uydusu bir gidiş-dönüş için 0.25 saniyeye ihtiyaç duyuyorsa, MEO uydusunun aynı yolculuğu tamamlamak için 0.1 saniyeden daha kısa bir süreye ihtiyacı vardır. MEO'lar 2 GHz ve üzeri frekans aralığında çalışır.
Bu uydular, Yüksek hızlı telefon sinyalleri için kullanılır. Tüm dünyayı kapsamak için on veya daha fazla MEO uydusuna ihtiyaç vardır.
Düşük Dünya Yörüngeli Uydular
Alçak dünya yörüngesi LEO)uydular esas olarak üç kategoriye ayrılır. Bunlar küçük LEO'lar, büyük LEO'lar ve Mega-LEO'lardır. LEO'lar şu uzaklıkta yörüngede dönecek500 to 1000 milesDünya yüzeyinin üstünde. Bu uydular, uydu telefonları ve GPS için kullanılır.
Bu nispeten kısa mesafe, iletim gecikmesini yalnızca 0,05 saniyeye düşürür. Bu, hassas ve hacimli alıcı ekipman ihtiyacını daha da azaltır. Tüm dünyayı kaplamak için yirmi veya daha fazla LEO uydusuna ihtiyaç vardır.
Küçük LEO'lar 800 MHz (0.8 GHz) aralığında çalışacak. Büyük LEO'lar 2 GHz veya üzeri aralıkta çalışacak ve Mega-LEO'lar 20-30 GHz aralığında çalışacak.
İlişkili daha yüksek frekanslar Mega-LEOs daha fazla bilgi taşıma kapasitesine dönüşür ve gerçek zamanlı, düşük gecikmeli video iletim şeması kapasitesine yol açar.
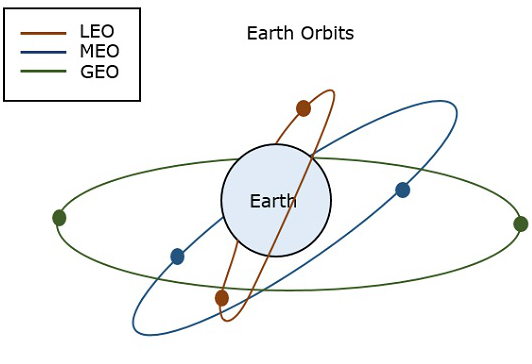
Aşağıdaki figure LEO, MEO ve GEO'nun yollarını gösterir
Yörünge Yuvaları
Burada, fazla olan bir soru ortaya çıkabilir. 200 satellites yer eşzamanlı yörüngede bulunanlar, birbirleriyle çarpışmalarını veya uzayda aynı konumu kullanmaya teşebbüs etmelerini nasıl engelleyebiliriz?
Bu soruna (soruya) cevap vermek için, Uluslararası Telekomünikasyon Birliği gibi uluslararası düzenleyici kurumlar (ITU) ve Federal İletişim Komisyonu gibi ulusal hükümet kuruluşları (FCC) yer eşzamanlı yörünge üzerinde iletişim uydularının konumlandırılabileceği konumları belirleyin.
Bu konumlar, boylam dereceleri olarak belirtilir ve orbital slots. FCC ve ITU, yörünge yuvalarına olan büyük talep nedeniyle C-bandı ve Ku-bandı uyduları için gerekli aralığı kademeli olarak sadece 2 dereceye düşürdü.
Yer istasyonu, doğrudan uydunun altına yerleştirilmişse maksimum sinyal seviyesini alacaktır. Aksi takdirde maksimum sinyal seviyesini alamaz ve bu sinyal seviyesi yer istasyonunun enlem ve boylamı arasındaki fark arttıkça azalır.
Bu nedenle, ihtiyaca göre uyduyu belirli bir yörüngeye yerleştirebiliriz. Şimdi bakış açıları hakkında konuşalım.
Bakış Açıları
Aşağıdaki iki yer istasyonu anteninin bir araya getirilmesi açısı look angles.
- Azimut Açısı
- Yükseklik Açısı
Genel olarak, bu açıların değerleri sabit olmayan yörüngeler için değişir. Oysa bu açıların değerleri, sabit yörüngeler için değişmez. Çünkü, sabit yörüngelerde bulunan uydular dünyaya göre durağan görünüyor.
Bu iki açı, uyduya doğrudan yer istasyonu anteninden işaret etmek için faydalıdır. Böylecemaximum gain yer istasyonu anteninin% 'si uyduya yönlendirilebilir.
Yapabiliriz calculate Yer istasyonunun boylam ve enlemini ve uydu yörüngesinin konumunu kullanarak jeostasyonel yörüngenin bakış açıları.
Azimut Açısı
Yerel yatay düzlem ile yer istasyonu, uydu ve yeryüzü merkezinden geçen düzlem arasındaki açıya azimuth angle.
formula Azimut açısı için ($\alpha$) dır-dir
$$\alpha\: = 180^0 + Tan^{-1}\left(\frac{Tan G}{TanL}\right)$$
Nerede,
L yer istasyonu anteninin enlemidir.
G uydu yörüngesinin konumu ile yer istasyonu anteninin konumu arasındaki farktır.
Aşağıdaki figure azimut açısını gösterir.

Ölçün horizontal angleyer istasyonu anteninde şekilde gösterildiği gibi kuzey kutbuna. Azimut açısını temsil eder. Uyduyu yatay olarak izlemek için kullanılır.
Yükseklik Açısı
Dikey düzlem ile uyduya işaret eden çizgi arasındaki açı, Yükseklik açısı olarak bilinir. Dikey düzlem, yatay düzleme dik olan düzlemden başka bir şey değildir.
formula Yükseklik açısı için ($\beta$) dır-dir
$$\beta = Tan^{-1}\left(\frac{cosG.cosL-0.15}{\sqrt{1-cos^2G.cos^2L}}\right)$$
Yukarıdaki formülü kullanarak yükseklik açısını hesaplayabiliriz. Aşağıdakifigure yükseklik açısını gösterir.

Ölçün vertical angleşekilde gösterildiği gibi yer istasyon anteninde yerden uyduya. Yükseklik açısını temsil eder.
Yörünge tedirginlikler
Aşağıdakiler yerçekimi ve yerçekimi olmayan kuvvetler veya parametreler nedeniyle yörüngesel tedirginliklerdir.
Düzensiz kütle dağılımı nedeniyle Dünya etrafındaki düzensiz çekim kuvveti. Dünyanın manyetik alanı da yörünge bozulmalarına neden olur.
Ana dış tedirginlikler Güneş ve Ay'dan gelir. Bir uydu bu dış cisimlere yakın olduğunda, daha güçlü bir çekim kuvveti alır.
Düşük yörüngeli uydular, atomlar ve iyonlarla çarpışmanın neden olduğu sürtünmeden etkilenir.
Güneş radyasyonu basıncı, büyük güneş panelleri kullanan büyük GEO uydularını etkiler.
Antenden gelen RF radyasyonunun neden olduğu kendi kendine üretilen torklar ve basınçlar.
Çoğu uydu bir propulsion subsystem uygun bir dönüş ekseni yönünü korumak ve uydunun pertürbasyon kuvvetlerine karşı irtifasını kontrol etmek için.
Uydular, ömürlerinin çoğu boyunca uzayda kalır. Uzayda ağırlıksızlık ortamının var olduğunu biliyoruz. Bu nedenle uydular uzayda ek güçlü çerçeveler gerektirmez. Ancak bunlar başlatma işlemi sırasında gereklidir. Çünkü bu süreçte uydu, uygun bir yörüngeye yerleştirilene kadar şiddetli bir şekilde sallanır.
design of satellites uyduyu yörüngeye yerleştirmek için bir veya daha fazla fırlatma aracı ile uyumlu olmalıdır.
Devrim döneminin daha yükseğe çıkacağını biliyoruz apogeeKepler'in ikinci yasasına göre irtifa. Yörünge sabit transfer yörüngesinin süresi neredeyse 16 saate eşittir. Eğerperigee GEO rakımına (yaklaşık 36.000 km) çıkarılırsa, devir süresi 24 saate çıkar.
Uyduların Başlatılması
Uyduyu uygun bir yörüngeye yerleştirme işlemi, launching process. Bu işlem sırasında yer istasyonlarından uydunun çalışmasını kontrol edebiliriz. Temel olarak, bir uydu fırlatmanın dört aşaması vardır.
First Stage - Fırlatma aracının ilk aşaması, yerden fırlatma aracı ile birlikte uyduyu kaldırmak için roketler ve yakıt içerir.
Second Stage- Fırlatma aracının ikinci aşaması daha küçük roketler içerir. İlk aşama tamamlandıktan sonra ateşlenir. Uyduyu uzaya göndermek için kendilerine ait yakıt depoları var.
Third Stage- Fırlatma aracının üçüncü (üst) aşaması uydu kaportasına bağlanır. Bu kaplama, uyduyu içeren ve uyduyu koruyan metal bir kalkandır.
Fourth Stage- Uydu, Dünya atmosferinin dışına çıkıldığında fırlatma aracının üst kademesinden ayrılır. Ardından, uydu bir “transfer yörüngesine” gidecektir. Bu yörünge, uyduyu daha yükseğe uzaya gönderir.
Uydu yörüngenin istenen yüksekliğine ulaştığında, güneş panelleri ve iletişim antenleri gibi alt sistemleri açılır. Ardından uydu, diğer uydularla birlikte yörüngedeki konumunu alır. Artık uydu sağlamaya hazırservices halka.
Uydudan Fırlatma Araçları
Uydu fırlatma araçları, ihtiyaca göre uyduları belirli bir yörüngeye fırlatır. Uydu fırlatma araçları çok aşamalı roketlerden başka bir şey değildir. Aşağıdakilertwo types uydu fırlatma araçları.
- Giderilebilir Fırlatma Araçları (ÖTA)
- Yeniden Kullanılabilir Fırlatma Araçları (RLV)
Giderilebilir Fırlatma Araçları
Harcanabilir fırlatma araçları (ÖTA), uyduları uzayda bıraktıktan sonra yok edilir. Aşağıdaki resim ELV'nin nasıl göründüğünü göstermektedir.

ÖTA, üç aşama içerir. ÖTA'nın birinci ve ikinci aşamaları uyduyu yaklaşık 50 mil ve 100 mil yükseltir. ÖTA'nın üçüncü aşaması, uyduyu transfer yörüngesine yerleştirir. GöreviELV uydu transfer yörüngesine ulaştığında tamamlanacak ve yedek parçaları yeryüzüne düşürülecektir.
Yeniden Kullanılabilir Fırlatma Araçları
Yeniden kullanılabilir fırlatma araçları (RLV) kullanılabilir multiple timesuyduları başlatmak için. Genellikle bu tür fırlatma araçları, uyduyu uzayda bıraktıktan sonra dünyaya geri döneceklerdir.
Aşağıdaki resimde yeniden kullanılabilir bir fırlatma aracı gösterilmektedir. Olarak da bilinirspace shuttle.

İşlevleri space shuttleELV'nin birinci ve ikinci aşamalarının işlevlerine benzer. Uydu, uzay mekiğinin üçüncü aşamasıyla birlikte kargo bölümüne monte edilir. Uzay mekiği 150 ila 200 mil yüksekliğe ulaştığında kargo bölmesinden fırlatılır.
Ardından, uzay mekiğinin üçüncü aşaması ateşlenir ve uyduyu bir transfer yörüngesine yerleştirir. Bundan sonra, uzay mekiği bir süre için dünyaya geri dönecek.reuse.
Uydu haberleşme sisteminde çeşitli işlemler gerçekleşir. Bunların arasında ana operasyonlar yörünge kontrolü, uydunun yüksekliği, diğer alt sistemlerin izlenmesi ve kontrol edilmesidir.
Bir uydu iletişimi esas olarak iki segments. Bunlar uzay bölümü ve dünya bölümüdür. Dolayısıyla, buna göre iki tür alt sistem olacaktır, yani uzay bölümü alt sistemleri ve yer bölümü alt sistemleri. Aşağıdakifigure bu kavramı örneklemektedir.
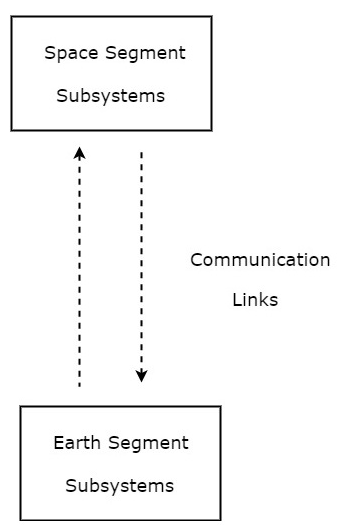
Şekilde gösterildiği gibi, communication uzay segmenti alt sistemleri ile dünya segmenti alt sistemleri arasında iletişim bağlantıları aracılığıyla gerçekleşir.
Uzay Segmenti Alt Sistemleri
Uzay segmentinde bulunan alt sistemler, uzay segmenti alt sistemleri olarak adlandırılır. Aşağıdakilerspace segment subsystems.
- AOC Alt Sistemi
- TTCM Alt Sistemi
- Güç ve Anten Alt Sistemleri
- Transponders
Dünya Segmenti Alt Sistemleri
Yer segmentinde bulunan alt sistemler, kullanıcılar arasındaki iletişimi sağlamak için uydu tekrarlayıcıya erişme yeteneğine sahiptir. Earth segment zemin bölümü olarak da adlandırılır.
Dünya bölümü esas olarak iki işlevi yerine getirir. Bunlar, uyduya bir sinyal iletimi ve uydudan sinyal alımıdır.Earth stations dünya segmentinde bulunan başlıca alt sistemlerdir.
Sonraki bölümlerde uzay bölümü ve dünya bölümünün tüm bu alt sistemlerini tartışacağız.
Güneş, ay ve diğer gezegenlerden gelen yerçekimi kuvvetleri nedeniyle uydunun yörüngesinden sapabileceğini biliyoruz. Uydu dünyanın etrafında hareket ettiği için bu kuvvetler 24 saatlik bir süre içinde döngüsel olarak değişir.
Rakım ve Yörünge Kontrolü (AOC)Alt sistem, uyduyu ilgili yörüngeden saptığında sağ yörüngeye yerleştirebilen roket motorlarından oluşur. AOC altsistemi, dar huzme tipindeki antenlerin toprağa doğru bakması için faydalıdır.
Bu AOC alt sistemini şu şekilde yapabiliriz: two parts.
- İrtifa Kontrol Alt Sistemi
- Yörünge Kontrol Alt Sistemi
Şimdi bu iki alt sistemi tek tek tartışalım.
İrtifa Kontrol Alt Sistemi
İrtifa kontrol alt sistemi, uydunun kendi yörüngesindeki yönelimiyle ilgilenir. Aşağıdakilertwo methods yörüngede bulunan uyduyu kararlı hale getirmek için.
- Uyduyu döndürmek
- Üç eksen yöntemi
Uyduyu döndürmek
Bu yöntemde uydunun gövdesi kendi etrafında dönmektedir. spin axis. Genelde jiroskopik tipte bir kuvvet oluşturmak için 30 ila 100 rpm arasında döndürülebilir. Bundan dolayı, spin ekseni stabilize olur ve uydu aynı yönü gösterecektir. Bu tür uydular şu şekilde adlandırılır:spinners.
Döndürücü, silindirik şekle sahip bir tambur içerir. Bu tambur güneş pilleri ile kaplıdır. Bu tamburda güç sistemleri ve roketler mevcuttur.
İletişim alt sistemi tamburun üstüne yerleştirilmiştir. Bu iletişim sistemini bir elektrik motoru çalıştırır. Bu motorun yönü, uydu gövdesinin dönüşünün tersi olacaktır, böylece antenler dünyaya bakacaktır. Bu tür bir işlemi gerçekleştiren uydulara,de-spin.
Başlatma aşamasında uydu spinsküçük radyal gaz jetleri çalıştırıldığında. Bundan sonrade-spin sistem, TTCM altsistem antenlerinin yer istasyonuna bakmasını sağlamak için çalışır.
Üç Eksen Yöntemi
Bu yöntemde bir veya daha fazla momentum çarkı kullanarak uyduyu stabilize edebiliriz. Bu yöntemethree-axis method. Bu yöntemin avantajı, uydunun üç eksende yönlenmesinin kontrol edilmesi ve uydunun ana gövdesinin dönmesine gerek olmamasıdır.
Bu yöntemde aşağıdakiler three axes dikkate alındı.
Roll axis uydunun yörünge düzleminde hareket ettiği yönde kabul edilir.
Yaw axis yeryüzü yönünde kabul edilir.
Pitch axis yörünge düzlemine dik olan yönde kabul edilir.
Bu üç eksen aşağıda gösterilmiştir figure.
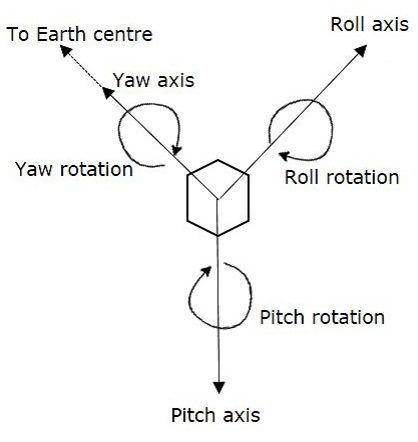
X R , Y R ve Z R sırasıyla dönüş ekseni, sapma ekseni ve eğim eksenidir. Bu üç eksen, uydunun konumu şu şekilde dikkate alınarak tanımlanır:reference. Bu üç eksen uydunun yüksekliğini tanımlar.
X, Y ve Z başka bir Kartezyen eksen kümesi olsun. Bu üç eksen kümesi, uydunun referans eksenlerine göre yönelimi hakkında bilgi sağlar. Uydunun yüksekliğinde bir değişiklik varsa, ilgili eksenler arasındaki açılar değişecektir.
Bu yöntemde, her eksen iki gaz jeti içerir. Üç eksenin her iki yönünde dönüşü sağlayacaklardır.
first gas jet uydunun belirli bir eksen yönünde hareket etmesi gerektiğinde bir süre çalıştırılacaktır.
second gas jetuydu istenilen konuma ulaştığında aynı süre çalıştırılacaktır. Böylece ikinci gaz jeti, uydunun o eksen yönündeki hareketini durduracaktır.
Yörünge Kontrol Alt Sistemi
Yörünge kontrol alt sistemi, uydu yörüngesinden saptığında uyduyu doğru yörüngesine getirmek için kullanışlıdır.
Yer istasyonunda bulunan TTCM alt sistemi, uydunun konumunu izler. Uydu yörüngesinde herhangi bir değişiklik olursa, Orbit kontrol alt sistemine düzeltme ile ilgili bir sinyal gönderir. Ardından, uyduyu doğru yörüngeye getirerek bu sorunu çözecektir.
Bu şekilde AOC subsystem uzayda uydunun tüm ömrü boyunca doğru yörüngede ve doğru irtifada uydu konumunu gözetir.
Telemetri, İzleme, Komut Verme ve İzleme (TTCM)alt sistem hem uydu hem de yer istasyonunda mevcuttur. Genelde uydu, verileri sensörler aracılığıyla alır. Böylece, uyduda bulunan Telemetri alt sistemi bu verileri yer istasyonlarına gönderir. Bu nedenle, TTCM alt sistemi, herhangi bir iletişim uydusunun başarılı bir şekilde çalışması için çok gereklidir.
Uyduyu uygun yörüngeye yerleştirdikten sonra yaşam süresi boyunca kontrol etmek uydu operatörünün sorumluluğundadır. Bu, yardımı ile yapılabilirTTCM subsystem.
Bu TTCM alt sistemini şu şekilde yapabiliriz: three parts.
- Telemetri ve İzleme Alt Sistemi
- Alt Sistem İzleme
- Komutan Alt Sistem
Telemetri ve İzleme Alt Sistemi
Kelime ‘Telemetry’uzaktan ölçüm anlamına gelir. Temel olarak aşağıdaki işlemler 'Telemetri'de gerçekleşir.
Ölçülecek miktarla orantılı olan bir elektrik sinyalinin üretilmesi.
Elektrik sinyalini kodlamak.
Bu kodu uzak bir mesafeye iletiyorum.
Telemetry subsystem uyduda bulunan esas olarak iki işlevi yerine getirir -
- sensörlerden veri almak ve
- bu verileri bir yer istasyonuna iletmek.
Uydular, çeşitli alt sistemlerin basınç, sıcaklık, durum vb. Gibi farklı parametreleri izlemek için epeyce sensöre sahiptir. Genelde telemetri verileri FSK veya PSK olarak iletilir.
Telemetri alt sistemi uzaktan kumandalı bir sistemdir. İzleme verilerini uydudan yer istasyonuna gönderir. Genel olaraktelemetry signals irtifa, çevre ve uydu ile ilgili bilgileri taşır.
Alt Sistem İzleme
Takip alt sistemi, uydunun konumunu ve mevcut yörüngesini bilmek için kullanışlıdır. Uydu Kontrol Merkezi(SCC)Telemetri downlink yardımıyla uzay segmenti alt sistemlerinin çalışmasını ve durumunu izler. Ve bu alt sistemleri komut yukarı bağlantısını kullanarak kontrol eder.
Biliyoruz ki tracking subsystembir yer istasyonunda da mevcuttur. Esas olarak uydunun menziline ve bakış açılarına odaklanır. Uyduyu izlemek için kullanılan tekniklerin sayısı. İçinexampleUydu üzerinde bulunan hız ve ivme sensörlerinden elde edilen veriler kullanılarak uydunun yörünge konumundaki değişiklik tespit edilebilir.
tracking subsystemBir yer istasyonunda bulunan uydu, fırlatma aracının son aşamasından bırakıldığında uyduyu takip eder. İlk yörüngede uydunun konumlandırılması ve transfer yörüngesi gibi işlevleri yerine getirir.
Komutan Alt Sistem
Uydunun bir yörüngede fırlatılması ve o yörüngede çalışması için komuta alt sistemi gereklidir. Bu alt sistem, bu değerlerde bir sapma olduğunda, uydunun yüksekliğini ve yörüngesini ayarlar. Aynı zamanda iletişim alt sistemini de kontrol eder. Bucommanding subsystem telemetri ve takip alt sistemlerinden alınan verilere dayanarak uyduda bulunan diğer alt sistemlerin AÇIK / KAPALI konuma getirilmesinden sorumludur.
Genelde kontrol kodları komut kelimelerine dönüştürülür. Bu komut kelimeleri şeklinde göndermek için kullanılırTDM frames. Başlangıçta, uyduda komut kelimelerinin geçerliliği kontrol edilir. Bundan sonra bu komut kelimeleri yer istasyonuna geri gönderilebilir. Burada bu komut kelimeleri bir kez daha kontrol edilir.
Yer istasyonu da aynı (doğru) komut kelimesini alırsa, uyduya bir yürütme talimatı gönderir. Yani bu komutu yürütür.
İşlevsellik açısından Telemetri alt sistemi ve komuta eden alt sistem birbirine zıttır. Birincisi uydunun bilgisini yer istasyonuna ilettiği için ikincisi yer istasyonundan komut sinyallerini alır.
Bu bölümde tartışalım Power systems çeşitli uydu alt sistemlerinin güç aldığı ve Antenna subsystems tek tek.
Güç Sistemleri
Bir yörüngede bulunan uydunun ömrü boyunca sürekli çalıştırılması gerektiğini biliyoruz. Bu nedenle uydu, içinde bulunan çeşitli elektronik sistemleri ve iletişim yükünü çalıştırmak için dahili güce ihtiyaç duyar.
Power systembir uydunun çalışması için gereken gücü sağlayan hayati bir alt sistemdir. Bu sistemlerde ağırlıklı olarak güneş pilleri (veya paneller) ve şarj edilebilir piller kullanılmaktadır.
Güneş hücreleri
Temel olarak solar cellsgelen güneş ışığından elektrik gücü (akım) üretir. Bu nedenle, güneş pilleri öncelikle diğer uydu alt sistemlerine güç sağlamak için kullanılır.
Bireysel güneş pillerinin çok daha az güç ürettiğini biliyoruz. Bu nedenle, daha fazla güç üretmek için, bir dizi formunda bulunan hücre grupları kullanılabilir.
Solar Diziler
İki tane types of solar arraysuydularda kullanılan. Bunlar silindirik güneş panelleri ve dikdörtgen güneş panelleri veya güneş yelkenleridir.
Cylindrical solar arraysdönen uydularda kullanılır. Silindirik dizinin sadece bir kısmı herhangi bir zamanda güneş ışığı altında kaplanacaktır. Bundan dolayı elektrik enerjisi kısmi güneş dizisinden üretilir. Bu, bu tipin dezavantajıdır.
Silindirik güneş panellerinin dezavantajı, Solar sail. Bu, daha fazla güç üretiyor çünkü güneş yelkeninin tüm güneş pilleri güneş ışığına maruz kalıyor.
Şarj edilebilir pil
Tutulmalar sırasında güneş ışığından güç almak zordur. Dolayısıyla, bu durumda diğer alt sistemler gücürechargeable batteries. Bu piller, uydunun fırlatılması sırasında da diğer alt sistemlere güç üretir.
Genelde bu piller, güneş ışığı varlığında güneş pilleri tarafından üretilen aşırı akım nedeniyle şarj olur.
Anten Alt Sistemleri
Antenler hem uydu hem de yer istasyonunda mevcuttur. Şimdi uydu antenlerinden bahsedelim.
Uydu antenleri performans gösterir two typesfonksiyonların. Bunlar yer istasyonundan gelen sinyalleri alıp ihtiyaca göre bir veya daha fazla yer istasyonuna sinyal gönderiyorlar. Diğer bir deyişle, uydu antenleri yukarı bağlantı sinyallerini alır ve aşağı bağlantı sinyallerini iletir.
Uydu antenlerinin uzunluğunun çalışma frekansı ile ters orantılı olduğunu biliyoruz. Uydu antenlerinin uzunluğunu azaltmak için çalışma frekansı artırılmalıdır. Bu nedenle, uydu antenleri şu sırayla çalışır:GHz frekanslar.
Uydu Antenleri
Uyduda kullanılan antenler uydu antenleri olarak bilinir. Esas olarak dörttypes of Antennas. Onlar:
- Tel Antenler
- Korna Antenleri
- Dizi Antenleri
- Reflektör Antenleri
Şimdi bu antenleri tek tek tartışalım.
Tel Antenler
Tel antenler temel antenlerdir. Mono pole ve dipole antennasbu kategoriye gir. Bunlar, TTCM alt sistemi için haberleşmeyi sağlamak için çok yüksek frekanslarda kullanılır.
Dipol olarak kullanılan toplam telin uzunluğu, dalga boyunun yarısına eşitse (yani, l = λ / 2), böyle bir anten şöyle adlandırılır half-wave dipole antenna.
Wire antennaserişim aralığını kapsamak ve her yönden sinyal gücü sağlamak için uygundur. Bu, tel antenlerin çok yönlü antenler olduğu anlamına gelir.
Korna Antenleri
Sonunda bir açıklığa sahip bir Anten, bir Aperture antenna. Bir açıklık ile sonlandırıldığında iletim hattının kenarı enerji yayar. Bir açıklık olan bu açıklık, onu bir açıklık anteni yapar.
Horn antennabir açıklık anten örneğidir. Uydularda yeryüzünde daha fazla alanı kaplamak için kullanılır.
Korna antenler, microwaveFrekans aralığı. Aynı besleme kornası, sinyallerin hem iletilmesi hem de alınması için kullanılabilir. Bu iki sinyali ayıran duplexer adlı bir cihaz.
Dizi Antenleri
Bir anten, tek başına belirli bir yönde belirli bir miktarda enerji yayabilir ve daha verimli bir çıktı üretmek için birkaç eleman eklenirse daha iyi iletimle sonuçlanır. Buluşa yol açan tam da bu fikirdir.Array Antennasveya Anten dizileri. Dizi antenleri, tek bir açıklıktan birden çok ışın oluşturmak için uydularda kullanılır.

Reflektör Antenleri

Yansıtıcı antenler, belirli bir yönde daha fazla sinyal gücüne sahip ışınlar üretmek için uygundur. Bu, bunların oldukça yönlü antenler olduğu anlamına gelir. Yani,Parabolic reflectorsuydu haberleşme sistemlerinde antenlerin kazancını arttırır. Dolayısıyla bunlar telekomünikasyon ve yayıncılıkta kullanılmaktadır.
Parabolik Reflektör anteni, transmittingbir sinyal, yani beslemeden gelen sinyal, dalgayı parabole odaklamak için bir dipolden veya bir huni antenden gelir. Bu, dalgaların odak noktasından çıkıp Paraboloidal reflektöre çarptığı anlamına gelir. Bu dalga artık koşutlanmış dalga cephesi olarak yansıtılır.
Aynı anten bir receiverElektromanyetik dalga parabolün şekline çarptığında, dalga besleme noktasına yansır. Beslemesinde alıcı anten görevi gören dipol veya huni anten, bu sinyali alarak elektrik sinyaline dönüştürür ve alıcı devresine iletir.
Bir uydunun verici ve alıcı antenleri arasındaki bağlantı bağlantısını sağlayan alt sistem, Transponder. Uzay segmenti alt sistemlerinin en önemli alt sistemlerinden biridir.
Transponder, bir uydudaki hem verici hem de alıcı (Yanıtlayıcı) işlevlerini yerine getirir. Dolayısıyla, 'Transponder' kelimesi iki kelimeden oluşan birkaç harfin, Verici(Trans) ve Yanıtlayıcı (ponder).
Transponder'in blok şeması
Transponder esas olarak two functions. Bunlar alınan giriş sinyalini yükseltir ve frekansını çevirir. Genel olarak, iletilen ve alınan sinyaller arasındaki paraziti önlemek için hem yukarı bağlantı hem de aşağı bağlantı için farklı frekans değerleri seçilir.
block diagram Transponderin sayısı aşağıdaki şekilde gösterilmiştir.
Transponder'ın çalışmasını blok diyagramın kendisinden kolayca anlayabiliriz. Her bloğun işlevi aşağıda belirtilmiştir.
Duplexeriki yönlü bir mikrodalga kapısıdır. Uydu anteninden yukarı bağlantı sinyalini alır ve uydu antenine aşağı bağlantı sinyalini iletir.
Low Noise Amplifier (LNA) zayıf alınan sinyali yükseltir.
Carrier Processoralınan sinyalin (yukarı bağlantı) frekans aşağı dönüşümünü gerçekleştirir. Bu blok, transponder tipini belirler.
Power Amplifier frekans aşağı dönüştürülmüş sinyalin (aşağı bağlantı) gücünü gerekli seviyeye yükseltir.
Transponder Türleri
Temelde var two typestransponder sayısı. Bunlar Bent boru transponderleri ve Rejeneratif transponderlerdir.
Bükülmüş Boru Transponderleri
Bükülmüş boru transponder, mikrodalga frekans sinyali alır. Giriş sinyalinin frekansını RF frekansına dönüştürür ve ardından yükseltir.
Bükülmüş boru aktarıcısı, tekrarlayıcı olarak da adlandırılır ve conventional transponder. Hem analog hem de dijital sinyaller için uygundur.
Rejeneratif Transponderler
Rejeneratif transponder, Bent boru transponderinin işlevlerini yerine getirir. yani, frekans öteleme ve büyütme. Bu iki işleve ek olarak, Rejeneratif transponder ayrıca RF taşıyıcısının temel banda demodülasyonunu, sinyallerin rejenerasyonunu ve modülasyonu da gerçekleştirir.
Rejeneratif transponder, İşleme transponder olarak da adlandırılır. Yalnızca dijital sinyaller için uygundur. Anaadvantages Rejeneratif transponderlerin% 50'si Sinyal Gürültü Oranında (SNR) gelişmedir ve uygulamada daha fazla esnekliğe sahiptir.
earth segmentUydu haberleşme sisteminin esas olarak iki yer istasyonundan oluşur. Bunlar yer istasyonunu iletiyor ve yer istasyonunu alıyor.
İleten earth stationbilgi sinyallerini uyduya iletir. Oysa alıcı yer istasyonu bilgi sinyallerini uydudan alır. Bazen, aynı yer istasyonu hem gönderme hem de alma amacıyla kullanılabilir.
Genel olarak, yer istasyonları temel bant sinyallerini aşağıdaki formlardan birinde alır. Analog formda veya dijital formda ses sinyalleri ve video sinyalleri.
Başlangıçta, adı verilen analog modülasyon tekniği FM modulationanalog formda olan hem ses hem de video sinyallerini iletmek için kullanılır. Daha sonra, sayısal modülasyon teknikleri, yani Frekans Kaymalı Anahtarlama(FSK) ve Faz Kaydırma Anahtarlama (PSK)bu sinyalleri iletmek için kullanılır. Çünkü hem ses hem de video sinyalleri analogdan dönüştürülerek dijitalde temsil etmek için kullanılır.
Yer İstasyonu Blok Şeması
Bir tasarım Earth stationsadece yer istasyonunun konumuna değil aynı zamanda diğer bazı faktörlere de bağlıdır. Yer istasyonlarının konumu karada, denizdeki gemilerde ve uçakta olabilir. Bağımlı faktörler, hizmet sağlama türü, frekans bantlarının kullanımı, verici, alıcı ve anten özellikleridir.
block diagram Dijital yer istasyonu aşağıdaki şekilde gösterilmiştir.

Yer istasyonunun çalışmasını yukarıdaki şekilden kolayca anlayabiliriz. Dört ana varsubsystemsherhangi bir yer istasyonunda bulunan. Bunlar verici, alıcı, anten ve izleme alt sistemidir.
Verici
İkili (dijital) bilgi, karasal ağdan yer istasyonunun temel bant ekipmanına girer. Encoder bit hata oranını en aza indirmek için hata düzeltme bitleri içerir.
Uydu haberleşmesinde Ara Frekans (IF)36 MHz bant genişliğine sahip bir transponder kullanılarak 70 MHz olarak seçilebilir. Benzer şekilde IF, 54 MHz veya 72 MHz bant genişliğine sahip bir transponder kullanılarak 140 MHz olarak seçilebilir.
Yukarı dönüştürücü, modüle edilmiş sinyalin daha yüksek frekansa frekans dönüşümünü gerçekleştirir. Bu sinyal, Yüksek güçlü amplifikatör kullanılarak güçlendirilecektir. Yer istasyonu anteni bu sinyali iletir.
Alıcı
Sırasında receptionyer istasyonu anteni uydu-yer bağı sinyalini alır. Bu, düşük seviyeli modüle edilmiş bir RF sinyalidir. Genel olarak, alınan sinyal daha az sinyal gücüne sahip olacaktır. Bu sinyali yükseltmek için Düşük Gürültülü Amplifikatör(LNA)kullanıldı. Bundan dolayı, Sinyal Gürültü Oranı (SNR) değerinde bir gelişme var.
RF sinyali olabilir down converted70 veya 140 MHz olan Ara Frekans (IF) değerine. Çünkü bu ara frekanslarda demodüle etmek kolaydır.
İşlevi decoderkodlayıcının tam tersidir. Dolayısıyla, kod çözücü, hata düzeltme bitlerini kaldırarak ve varsa bit konumlarını düzelterek hatasız bir ikili bilgi üretir.
Bu ikili bilgi, daha fazla işlem için temel bant ekipmanına verilir ve ardından karasal ağa iletilir.
Yer İstasyonu Anteni
Ana parçaları Earth station Antennabesleme sistemi ve Anten reflektörüdür. Bu iki parça bir araya geldiğinde elektromanyetik dalgalar yayar veya alır. Besleme sistemi karşılıklılık teoremine uyduğundan, yer istasyonu antenleri elektromanyetik dalgaları hem iletmek hem de almak için uygundur.
Parabolic reflectorsyer istasyonlarında ana anten olarak kullanılmaktadır. Bu reflektörlerin kazancı yüksektir. Paralel bir ışını, besleme sisteminin bulunduğu odakta bir noktaya odaklayabilirler.
Alt Sistem İzleme
Tracking subsystemhaberleşmeyi sağlamak için uyduyu takip eder ve ışının ona doğru geldiğinden emin olur. Yer istasyonunda bulunan İzleme sistemi temel olaraktwo functions. Bunlar uydu edinimi ve uydunun izlenmesidir. Bu izleme aşağıdaki yollardan biriyle yapılabilir. Bunlar otomatik izleme, manuel izleme ve program izlemedir.
Bu bölümde, iki yer istasyonu örneğini tartışalım: Receive-only Home TV system ve Community Antenna TV system.
Yalnızca Ev TV Sistemini Alın
Yayın doğrudan evdeki TV alıcılarına yapılıyorsa, bu tür hizmetlere Doğrudan Yayın Uydusu denir. (DBS) hizmet.
Bir kafes tipi reflektör, sinyalleri bir odak noktasına odaklamak için kullanılabilir. dual feed-horn. İki ayrı çıkışı vardır. Bir çıkıştan C-bandı sinyalleri alacak ve diğer çıkıştan Ku-bandı sinyalleri alacaktır.
Televizyon programcılığı çoğunlukla ilk nesil sinyaller olarak ortaya çıkar. Bu sinyaller uydu üzerinden C bandındaki ağ ana uç istasyonlarına iletilir. Bu sinyaller sıkıştırılır ve dijital biçimde kablo ve DBS sağlayıcılarına iletilir.
C-bandı kullanıcıları ücretli TV kanallarına abone olabilir. Bu abonelik hizmetlericheaper çok kaynaklı programlamanın mevcudiyeti nedeniyle kabloyla karşılaştırıldığında.
block diagram DBS TV alıcısı aşağıdaki şekilde gösterilmiştir.
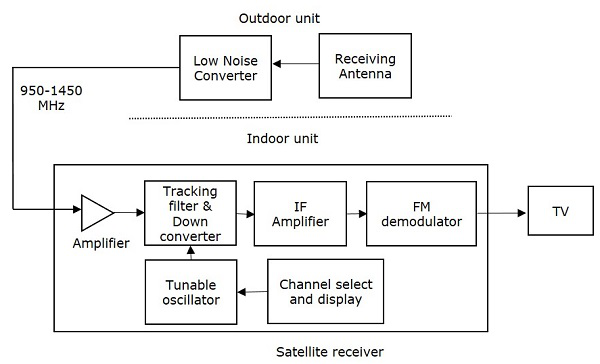
Dış ünite
Dış ünite esas olarak şunlardan oluşur: receiving antenna ve Düşük Gürültülü Dönüştürücü (LNC). Düşük Gürültülü Dönüştürücü (LNC), Düşük Gürültülü Amplifikatör (LNA) ve ardından bir dönüştürücü kombinasyonundan başka bir şey değildir. Alıcı anten doğrudan LNC'ye beslenir.
Genel olarak parabolic reflector ayrıca ışının daha fazla odaklanması için alıcı huni antenle birlikte kullanılır.
İç Ünite
Genel olarak, iç üniteye beslenen sinyal bir geniş bant sinyalidir. Bu sinyalin frekansı 950 MHz ile 1450 MHz arasındadır. İç ünitede bu sinyal, biramplifier.
Güçlendirilmiş sinyal, bir izleme filtresine ve aşağı dönüştürücüye uygulanır. İstenilen kanalı seçer ve frekansını birIntermediate Frequency (IF) 70 MHz.
IF amplifierdüzgün şekilde demodüle etmek için sinyal gücünü yükseltir. Temel bant (demodüle edilmiş) sinyal, bir Artık Tek Taraflı Bant (VSSB) sinyali oluşturmak için kullanılır. Bu sinyal, standart bir TV setinin VHF / UHF kanallarından birine beslenir.
DBS TV'de Frekans Modülasyonu (FM) kullanılır. Oysa VSSB şeklindeki Genlik Modülasyonu (AM), geleneksel TV'de kullanılır. Bumajor difference DBS TV ve geleneksel TV arasında.
Topluluk Anten TV Sistemi
Topluluk Anten TV (CATV)sistem tek bir dış ünite ve çoklu besleme kullanır. Bu beslemeler, her bir polarizasyon hissi için ayrı ayrı mevcuttur. Bu nedenle, tüm kanallar aynı anda iç mekan alıcıda mevcut olacaktır.
block diagram CATV sisteminin iç ünite sayısı aşağıdaki şekilde gösterilmiştir.
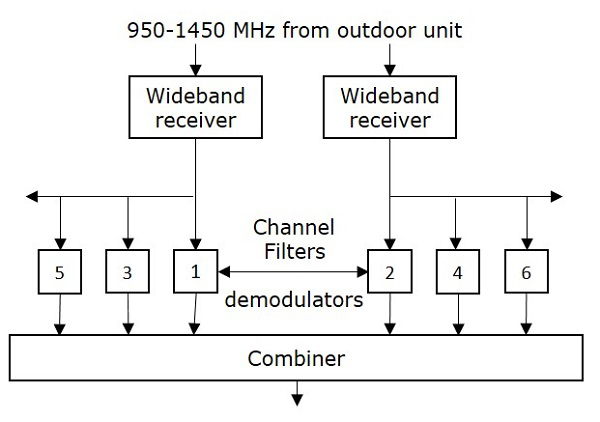
Bu durumda her kullanıcıya ayrı bir alıcıya ihtiyaç yoktur. Çünkü tüm taşıyıcılar ortak bir alıcı-filtre sisteminde demodüle edilmiştir. Bundan sonra, kanallar çoklanmış bir sinyale birleştirilir. Bu sinyal daha sonra bir kablo aracılığıyla abonelere (kullanıcılara) iletilir.
Uydu iletişim sistemlerinde iki tür güç hesabı vardır. Bunlar güç iletiyor ve güç hesaplamaları alıyor. Genel olarak bu hesaplamalaraLink budget calculations. Güç birimidecibel.
Önce Link Bütçesinde kullanılan temel terminolojiyi tartışalım ve ardından Link Bütçe hesaplamalarını açıklamaya geçelim.
Temel Terminoloji
Bir isotropic radiator(anten) her yöne eşit olarak yayılır. Ama pratik olarak mevcut değil. Bu sadece teorik bir antendir. Tüm gerçek (pratik) antenlerin performansını bu antene göre karşılaştırabiliriz.
Güç akı yoğunluğu
Bir izotropik radyatörün, r yarıçapına sahip kürenin merkezinde yer aldığını varsayalım. Güç akısı yoğunluğunun güç akışı ile birim alanın oranı olduğunu biliyoruz.
Power flux density,$\Psi_i$ izotropik bir radyatörün
$$\Psi_i = \frac{p_s}{4\pi r^2}$$
Nerede, $P_s$güç akışıdır. Genel olarak, pratik bir antenin güç akısı yoğunluğu yöne göre değişir. Ama omaximum value yalnızca belirli bir yönde olacaktır.
Anten kazancı
gain Pratik anten, pratik antenin maksimum güç akı yoğunluğunun ve izotropik antenin güç akı yoğunluğunun oranı olarak tanımlanır.
Bu nedenle Anten Kazancı veya Antenna gain, G
$$G = \frac{\Psi_m}{\Psi_i}$$
Nerede, $\Psi_m$pratik antenin maksimum güç akı yoğunluğudur. Ve,$\Psi_i$ izotropik radyatörün (anten) güç akı yoğunluğudur.
Eşdeğer İzotropik Yayılan Güç
Eşdeğer izotropik yayılan güç (EIRP), bağlantı bütçesinin ölçülmesinde kullanılan ana parametredir. Mathematicallyşu şekilde yazılabilir
$$EIRP = G\:\:P_s$$
EIRP'yi temsil edebiliriz decibels gibi
$$\left [ EIRP \right ] = \left [ G \right ] + \left [ P_s \right ]dBW$$
Nerede, G Verici anten Kazancı ve $P_s$ vericinin gücüdür.
İletim Kayıpları
Bir uçta gönderilen ve alıcı istasyonda alınan güç arasındaki fark şu şekilde bilinir: Transmission losses. Kayıplar 2 türe ayrılabilir.
- Sabit kayıplar
- Değişken kayıplar
Besleyici kayıpları gibi sabit olan kayıplar şu şekilde bilinir: constant losses. Hangi önlemleri almış olursak olalım, yine de bu kayıpların meydana gelmesi kaçınılmazdır.
Başka bir kayıp türü variable loss. Gökyüzü ve hava durumu bu tür kayıplara bir örnektir. Gökyüzü net değilse sinyalin etkili bir şekilde uyduya ulaşmayacağı veya tam tersi anlamına gelir.
Bu nedenle, bizim prosedürü 1 olarak sebebiyle açık havada ya da berrak gökyüzü durumuna kayıplarının hesaplamalarını içeren st bu kayıplar sabittir çünkü. Zamanla değişmeyecekler. Ardından 2. adımda kötü hava koşullarından kaynaklanan kayıpları hesaplayabiliriz.
Bütçe hesaplamalarını bağlayın
İki tür bağlantı bütçe hesaplaması vardır, çünkü iki bağlantı vardır: uplink ve downlink.
Yer İstasyonu Uplink
Dünyanın sinyali uyduya ilettiği ve uydunun aldığı süreçtir. Onunmathematical equation olarak yazılabilir
$$\left(\frac{C}{N_0}\right)_U = [EIRP]_U+\left(\frac{G}{T}\right)_U - [LOSSES]_U -K$$
Nerede,
- $\left [\frac{C}{N_0}\right ]$ taşıyıcı gürültü yoğunluğu oranıdır
- $\left [\frac{G}{T}\right ]$ uydu alıcısı G / T oranıdır ve birimler dB / K'dir
Burada Kayıplar, uydu alıcısı besleyici kayıplarını temsil eder. Frekansa bağlı kayıpların tümü dikkate alınır.
EIRP değeri, etkili UPLINK için mümkün olduğu kadar düşük olmalıdır. Ve bu, açık bir gökyüzü durumu elde ettiğimizde mümkündür.
Burada, yukarı bağlantı fenomenini temsil eden (alt simge) "U" gösterimini kullandık.
Uydu Bağlantısı
Bu süreçte uydu sinyali gönderir ve yer istasyonu sinyali alır. Denklem uydu bağlantısıyla aynıdır, ancak farklı olarak her yerde "U" yerine "D" kısaltmasını uydu-yer bağı olgusunu belirtmek için kullanırız.
Onun mathematical denklem şu şekilde yazılabilir;
$$\left [\frac{C}{N_0}\right ]_D = \left [ EIRP \right ]_D + \left [ \frac{G}{T} \right ]_D - \left [ LOSSES \right ]_D - K$$
Nerede,
- $\left [\frac{C}{N_0}\right ]$ taşıyıcı gürültü yoğunluğu oranıdır
- $\left [\frac{G}{T}\right ]$ yer istasyonu alıcı G / T oranıdır ve birimler dB / K'dir
Burada, dünya istasyonlarının çevresinde mevcut olan tüm kayıplar.
Yukarıdaki denklemde sinyal bant genişliği B'yi dahil etmedik. Ancak, bunu dahil edersek denklem aşağıdaki gibi değiştirilecektir.
$$\left [\frac{C}{N_0}\right ]_D = \left [ EIRP \right ]_D + \left [ \frac{G}{T} \right ]_D - \left [ LOSSES \right ]_D -K-B$$
Bütçe bağlantısı
Yer uydusunu dikkate alıyorsak, o zaman boş alan yayılma kaybı (FSP) da dikkate alınmalıdır.
Anten doğru şekilde hizalanmazsa kayıplar meydana gelebilir. bu yüzden alıyoruzAML(Anten yanlış hizalama kayıpları) hesaba katılır. Benzer şekilde, uydudan toprağa doğru sinyal geldiğinde, toprak yüzeyi ile çarpışır ve bir kısmı emilir. Bunlar, tarafından verilen atmosferik absorpsiyon kaybı ile halledilir.“AA” ve db cinsinden ölçülür.
Şimdi, serbest gökyüzü için kayıp denklemini şu şekilde yazabiliriz:
$$Losses = FSL + RFL+ AML+ AA + PL$$
Nerede,
RFL, alınan besleyici kaybı anlamına gelir ve birimler db'dir.
PL, polarizasyon uyumsuzluğu kaybını ifade eder.
Şimdi decibel equation alınan güç için şu şekilde yazılabilir:
$$P_R = EIRP + G_R + Losses$$
Nerede,
- $P_R$ dBW cinsinden ölçülen alınan güç anlamına gelir.
- $G_r$ alıcı anten kazancıdır.
Aşağı bağlantının tasarlanması, yukarı bağlantının tasarlanmasından daha kritiktir. Antenin iletimi ve kazanımı için gerekli güç sınırlamaları nedeniyle.
Bazen bir uydunun servisi yer istasyonunda belirli bir yerde bulunur ve bazen mevcut değildir. Bu, bir uydunun dünyanın farklı yerlerinde bulunan kendine ait farklı servis istasyonlarına sahip olabileceği anlamına gelir. Uydu için taşıyıcı sinyal gönderirler.
Bu durumda, uydunun aralarında herhangi bir girişim olmaksızın, farklı istasyonlardan sinyal almasını veya vermesini sağlamak için çoklu erişim yapıyoruz. Aşağıdakilerthree types çoklu erişim teknikleri.
- FDMA (Frekans Bölmeli Çoklu Erişim)
- TDMA (Zaman Bölmeli Çoklu Erişim)
- CDMA (Kod Bölmeli Çoklu Erişim)
Şimdi her tekniği tek tek tartışalım.
FDMA
Bu tür çoklu erişimde, her sinyale farklı tipte bir frekans bandı (aralığı) atarız. Bu nedenle, herhangi iki sinyalin aynı tür frekans aralığı olmaması gerekir. Dolayısıyla, bu sinyalleri tek kanalda göndersek bile aralarında herhangi bir parazit olmayacaktır.
Bir mükemmel examplebu erişim türünden biri radyo kanallarımızdır. Çalışmaları için her istasyona farklı bir frekans bandı verildiğini görebiliriz.
Üç istasyon A, B ve C alalım. Bunlara FDMA tekniği ile erişmek istiyoruz. Bu yüzden onlara farklı frekans bantları atadık.
Şekilde gösterildiği gibi, uydu istasyonu A, 0 ila 20 HZ frekans aralığı altında tutulmuştur. Benzer şekilde, B ve C istasyonlarına sırasıyla 30-60 Hz ve 70-90 Hz frekans aralığı atanmıştır. Aralarında herhangi bir karışma yoktur.
Ana disadvantagebu tür bir sistem, çok patlamış olmasıdır. Bu tür çoklu erişim, dinamik ve düzensiz kanallar için önerilmez. Çünkü verilerini esnek ve verimsiz hale getirecek.
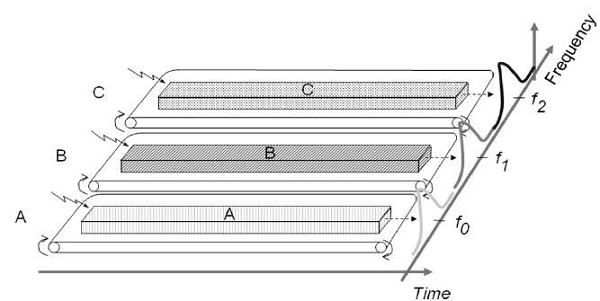
TDMA
Adından da anlaşılacağı gibi, TDMA zamana dayalı bir erişimdir. Burada her kanala belirli bir zaman çerçevesi veriyoruz. Bu zaman dilimi içinde, kanal tüm spektrum bant genişliğine erişebilir
Her istasyonun sabit bir uzunluğu veya yuvası vardır. Kullanılmayan slotlar boşta kalacaktır.
Diyelim ki, TDMA tekniğinde belirli bir kanala beş paket veri göndermek istiyoruz. Bu nedenle, onlara belirli zaman aralıkları atamalıyız veyatime frame içinde tüm bant genişliğine erişebilir.
Yukarıdaki şekilde, veri ileten paket 1, 3 ve 4 aktiftir. Oysa paket 2 ve 5, katılmadıkları için boşta. Bu format, belirli bir kanala bant genişliği atadığımızda her seferinde tekrarlanır.
Bununla birlikte, belirli bir kanala belirli zaman aralıkları atadık, ancak yük taşıma kapasitesine bağlı olarak da değiştirilebilir. Bu, bir kanal daha ağır yükler iletiyorsa, daha hafif yükler ileten kanaldan daha büyük bir zaman aralığı atanabileceği anlamına gelir. Bu en büyüğüadvantageFDMA üzerinden TDMA. TDMA'nın bir diğer avantajı da güç tüketiminin çok düşük olacağıdır.
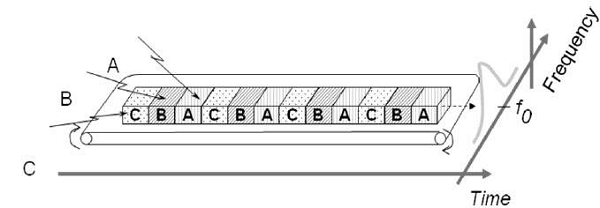
Note - Bazı uygulamalarda, combination ikinizde TDMA and FDMAteknikleri. Bu durumda, her kanal, belirli bir zaman çerçevesi için belirli bir frekans bandında çalıştırılacaktır. Bu durumda, frekans seçimi daha sağlamdır ve zaman sıkıştırma ile daha büyük bir kapasiteye sahiptir.
CDMA
CDMA tekniğinde, her kanala birbirinden ayırt edilebilmesi için benzersiz bir kod atanmıştır. Mükemmelexamplebu tür çoklu erişimlerin arasında hücresel sistemimiz var. Aynı bant genişliğini kullanan şirket müşterilerine aynı X veya Y mobil hizmet sağlayan iki kişinin cep telefonu numarasının birbiriyle eşleşmediğini görebiliyoruz.
CDMA işleminde, kodlanmış sinyalin ve yonga dizisinin iç çarpımının kodunu çözeriz. Bu nedenle matematiksel olarak şu şekilde yazılabilir:
$$Encoded\:signal = Orginal\:data\:\: \times\:\: chipping\:sequence$$
Basit advantagebu türden çoklu erişim, tüm kullanıcıların aynı anda tüm bant genişliğini bir arada yaşamasına ve kullanmasına izin vermesidir. Her kullanıcının farklı kodu olduğu için herhangi bir müdahale olmayacaktır.
Bu teknikte, bir dizi istasyon, FDMA ve TDMA'dan farklı olarak çok sayıda kanala sahip olabilir. Bu tekniğin en iyi yanı, her istasyonun tüm spektrumu her zaman kullanabilmesidir.
Uydu haberleşme hizmetleri aşağıdaki iki kategoriye ayrılabilir.
- Tek yönlü uydu iletişim bağlantı hizmeti
- İki yönlü uydu iletişim bağlantı hizmeti
Şimdi her hizmeti tek tek tartışalım
Tek Yönlü Uydu Haberleşme Link Hizmeti
İçinde one-wayuydu iletişimi bağlantı hizmeti, bilgiler bir yer istasyonundan bir uydu aracılığıyla bir veya daha fazla yer istasyonuna aktarılabilir. Bu, hem noktadan noktaya bağlantı hem de çok noktalı bağlantı sağlar.
Altında figure tek yönlü uydu iletişim bağlantı hizmetinin bir örneğini göstermektedir.
Burada iletişim, dünya yüzeyindeki ilk yer istasyonu (verici) ile ikinci yer istasyonu (alıcı) arasında bir uydu aracılığıyla gerçekleşir. one direction.
Aşağıdakilerden bazıları one-way uydu haberleşme bağlantısı services.
Radyo, TV ve İnternet servisleri gibi uydu servislerini yayınlamak.
Telemetri, İzleme ve Komuta hizmetleri gibi uzay operasyon hizmetleri.
Konum konum hizmeti gibi radyo belirleme uydu hizmeti.
İki yönlü Uydu Haberleşme Link Hizmeti
İçinde two-wayuydu iletişim bağlantısı, bilgi bir uydu aracılığıyla herhangi iki yer istasyonu arasında değiş tokuş edilebilir. Bu, yalnızca noktadan noktaya bağlantı sağladığı anlamına gelir.
Aşağıdaki şekil, iki yönlü uydu iletişim bağlantı hizmetinin bir örneğini göstermektedir.
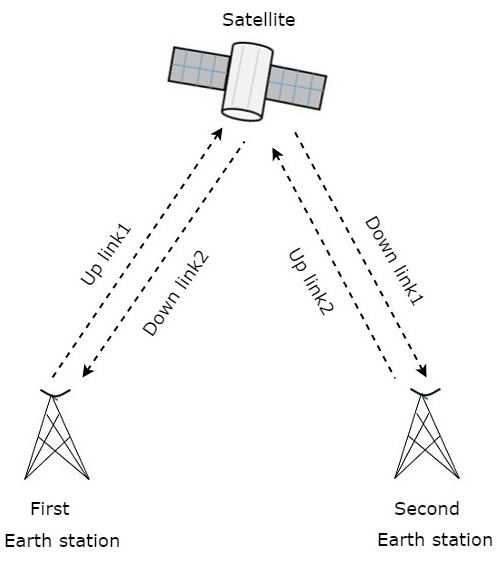
Burada iletişim, dünya yüzeyindeki ilk yer istasyonu (verici) ile ikinci yer istasyonu (alıcı) arasında bir uydu aracılığıyla gerçekleşir. two (her ikisi de) directions.
İki yönlü uydu iletişim bağlantısından bazıları aşağıdadır services.
Yüksek bit hızlı hizmetlerin Telefon, Faks ve Veri gibi sabit uydu hizmetleri.
Kara mobil, Denizcilik ve Aero mobil iletişim hizmetleri gibi mobil uydu hizmetleri.
Küresel Konumlandırma Sistemi (GPS)uyduya dayalı bir navigasyon sistemidir. Navigasyon ve pozisyon lokasyonunda devrim yarattı. Esas olarak konumlandırma, navigasyon, izleme ve ölçme uygulamalarında kullanılır.
Büyük advantagesUydu navigasyonu gerçek zamanlı konumlandırma ve zamanlama senkronizasyonudur. Bu nedenle uydu navigasyon sistemleri, mobilitenin anahtar parametre olduğu uygulamaların çoğunun ayrılmaz bir parçası haline geldi.
Tam bir operasyonel GPS uzay bölümü MEO'da yirmi dört uydu içerir. Bu uydular, her grup dört uydu içerecek şekilde altı gruba ayrılır. Dört uydulu gruba tek denirconstellation. Herhangi iki bitişik takımyıldız, boylam olarak 60 derece ile ayrılır.
orbital period her uydunun yaklaşık olarak eşittir twelve hours. Dolayısıyla tüm uydular her gün iki kez dünyanın etrafında döner. GPS alıcıları herhangi bir zamanda sinyalleri en az dört uydudan alacaktır.
GPS Kodları ve Hizmetleri
Her GPS uydusu iki sinyal iletir, L1 and L2 farklı frekanslardadır. TrilaterationGPS alıcısının konumunu (Enlem, Boylam, Yükseklik) bulmak için basit bir yöntemdir. Bu yöntemi kullanarak, bilinmeyen bir noktanın konumu bilinen üç noktadan ölçülebilir.
GPS Kodları
Aşağıda iki tür GPS kodu verilmiştir.
- Kaba Edinme kodu veya C / A kodu
- Kesin kod veya P kodu
Sinyal, L 1 1.023 Mbps rastgele bit dizisi yalancı ile modüle edilir. Bu koda Coarse Acquisition code veyaC/A code ve halk tarafından kullanılmaktadır.
Sinyal, L 2 , 10.23 Mbps sözde rasgele bit dizisi ile modüle edilir. Bu koda Kesin kod denir veyaP codeve askeri konumlandırma sistemlerinde kullanılır. Genel olarak bu P kodu şifreli bir biçimde iletilir ve bunaY code
P kodu, C / A koduyla karşılaştırıldığında daha iyi ölçüm doğruluğu sağlar, çünkü P kodunun bit hızı, C / A kodunun bit hızından daha büyüktür.
GPS Hizmetleri
GPS tarafından sağlanan iki hizmet türü aşağıdadır.
- Hassas Konumlandırma Hizmeti (PPS)
- Standart Konumlandırma Hizmeti (SPS)
PPS receiversL 1 ve L 2 olmak üzere iki sinyalde hem C / A kodunu hem de P kodunu izlemeye devam edin . P kodunu elde etmek için alıcıda Y kodunun şifresi çözülür.
SPS receiverssinyal üzerinde yalnızca C / A kodunu takip etmeye devam edin, L 1 .
GPS Alıcısı
GPS sisteminde uydudan kullanıcılara tek yönlü iletim vardır. Bu nedenle, bireysel kullanıcı vericiye ihtiyaç duymaz, yalnızca birGPS receiver. Esas olarak bir nesnenin doğru konumunu bulmak için kullanılır. Uydulardan aldığı sinyalleri kullanarak bu görevi gerçekleştirir.
block diagram GPS alıcısı aşağıdaki şekilde gösterilmiştir.
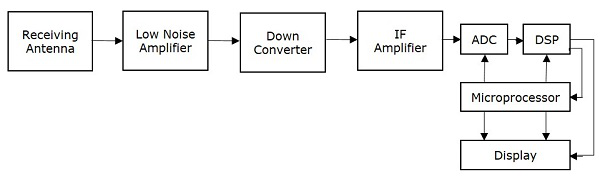
GPS alıcısında bulunan her bloğun işlevi aşağıda belirtilmiştir.
Receiving Antennauydu sinyallerini alır. Esas olarak dairesel polarize bir antendir.
Low Noise Amplifier (LNA) zayıf alınan sinyali yükseltir
Down converter alınan sinyalin frekansını bir Ara Frekans (IF) sinyaline dönüştürür.
IF Amplifier Ara Frekans (IF) sinyalini yükseltir.
ADCIF amplifikatöründen elde edilen analog sinyalin dijitale dönüşümünü gerçekleştirir. Örnekleme ve niceleme bloklarının ADC'de de (Analogdan Dijitale Dönüştürücü) mevcut olduğunu varsayalım.
DSP (Dijital Sinyal İşlemcisi) C / A kodunu üretir.
Microprocessordiğer dijital blokların çalışmasını kontrol etmek için konum hesaplamasını yapar ve zamanlama sinyallerini sağlar. Faydalı bilgileri ekranda görüntülemek için Ekran birimine gönderir.