파워 일렉트로닉스-퀵 가이드
Power Electronics는 전류와 전압의 흐름을 제어하고이를 사용자 부하에 적합한 형태로 변환하는 프로세스를 말합니다. 가장 바람직한 전력 전자 시스템은 효율성과 신뢰성이 100 % 인 시스템입니다.
다음 블록 다이어그램을 살펴보십시오. 파워 일렉트로닉 시스템의 구성 요소와 이들이 상호 연결되는 방식을 보여줍니다.
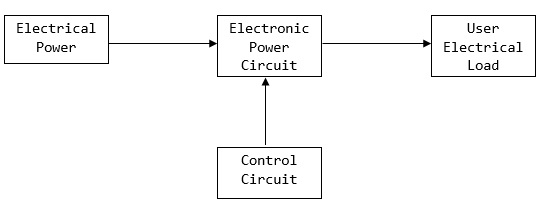
전력 전자 시스템은 전기 에너지를 한 형태에서 다른 형태로 변환하고 다음을 달성합니다.
- 최대 효율성
- 최고의 신뢰성
- 최대 가용성
- 최소 비용
- 최소 무게
- 작은 크기
전력 전자의 애플리케이션은 정적 애플리케이션과 드라이브 애플리케이션의 두 가지 유형으로 분류됩니다.
정적 애플리케이션
이것은 용접, 가열, 냉각, 전기 도금 및 DC 전원과 같은 이동 및 / 또는 회전 기계 부품을 사용합니다.
DC 전원 공급

애플리케이션 구동
드라이브 애플리케이션에는 모터와 같은 회전 부품이 있습니다. 예로는 압축기, 펌프, 컨베이어 벨트 및 에어컨 시스템이 있습니다.
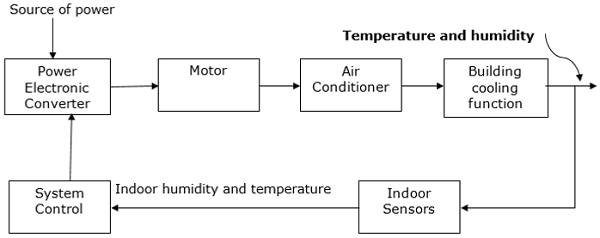
에어컨 시스템
전력 전자 장치는 압축기와 같은 요소를 제어하기 위해 에어컨에 광범위하게 사용됩니다. 파워 일렉트로닉스가 에어컨에 사용되는 방식을 보여주는 개략도는 아래와 같습니다.
전력 전자 스위칭 장치는 하나에 통합 된 액티브 스위칭 가능한 전력 반도체 드라이버의 조합입니다. 스위치의 주요 특성은 통합 시스템의 기능과 상호 작용의 내부 상관 관계에 의해 결정됩니다. 아래 그림은 전력 전자 스위치 시스템의 작동 방식을 보여줍니다.
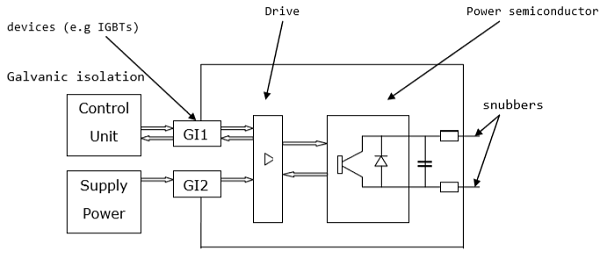
위 다이어그램의 외부 회로는 일반적으로 제어 장치에 비해 높은 전위로 유지됩니다. 유도 트랜스미터는 두 인터페이스간에 필요한 전위차를 지원하는 데 사용됩니다.
전력 스위칭 장치는 일반적으로 전력을 처리하는 정격, 즉 전력 손실률 대신 전류 및 전압 정격의 곱에 따라 선택됩니다. 결과적으로 전력 전자 스위치의 주요 매력적인 기능은 전력을 낮게 또는 거의 낭비하지 않는 기능입니다. 결과적으로 전자 스위치는 낮고 지속적인 전력 서지를 달성 할 수 있습니다.
선형 회로 요소는 전류 입력과 전압 출력간에 선형 관계를 나타내는 전기 회로의 구성 요소를 나타냅니다. 선형 회로가있는 요소의 예는 다음과 같습니다.
- Resistors
- Capacitors
- Inductors
- Transformers
선형 회로 요소를 더 잘 이해하려면 저항 요소 분석이 필요합니다.
저항기
저항은 전류의 흐름이 제한되어 에너지 변환을 일으키는 장치입니다. 예를 들어, 전구를 통해 전기가 흐르면 전기는 열 및 / 또는 빛과 같은 다른 형태의 에너지로 변환됩니다. 요소의 저항은 옴 (Ω) 단위로 측정됩니다.
주어진 회로의 저항 측정 값은 다음과 같습니다.
$$R=\rho \frac{L}{A}$$어디 R -저항 ρ -저항률; L-와이어 길이 과A − 와이어 단면적
다양한 저항기의 상징
| 저항기 |

|
| 가변 저항기 |
|
| 전위차계 |
|
커패시터
커패시터는 유전체로 알려진 절연체에 의해 분리 된 두 개의 전도성 물질 (플레이트라고도 함)이있는 전기 장치를 말합니다. 전기장을 사용하여 전기 에너지를 저장합니다. 전기장은 축전기가 배터리에 연결될 때 발생하여 양전하가 한 판에 축적되고 음전하가 다른 판에 축적됩니다.
커패시터의 전기장에 에너지가 저장되는 과정을 충전이라고하고, 에너지가 제거되면 방전이라고합니다. 커패시터에 저장된 전기 에너지 수준을 커패시턴스라고하며 패럿 (F) 단위로 측정됩니다. 하나의 패러 드는 1 C / V로 주어진 단위 볼트 당 하나의 쿨롱과 같습니다.
커패시터와 배터리의 차이점은 커패시터는 전기 에너지를 저장하는 반면 배터리는 화학 에너지를 저장하고 느린 속도로 에너지를 방출한다는 것입니다.
다양한 커패시터의 상징
커패시터의 다양한 기호는 아래 표에 나와 있습니다.
| 고정 커패시터 |
|
| 가변 커패시터 |
|
| 편광 커패시터 |
|
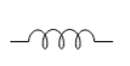
인덕터
인덕터는 자기장을 사용하여 전기 에너지를 저장하는 전자 장치입니다. 인덕터의 가장 간단한 형태는 코일 또는 루프 형태의 와이어로, 인덕턴스는 와이어의 루프 수에 정비례합니다. 또한 인덕턴스는 와이어의 재료 유형과 루프 반경에 따라 달라집니다.
일정한 회전 수와 반경 크기가 주어지면 공기 코어 만 인덕턴스를 최소화 할 수 있습니다. 공기와 동일한 용도로 사용되는 유전체 재료에는 목재, 유리 및 플라스틱이 포함됩니다. 이러한 재료는 인덕터 권선 과정에 도움이됩니다. 권선의 모양 (도넛 모양)과 강자성 물질 (예 : 철)은 총 인덕턴스를 증가시킵니다.
인덕터가 저장할 수있는 에너지의 양을 인덕턴스라고합니다. 헨리 (H) 단위로 측정됩니다.
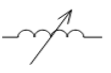
다양한 인덕터의 상징
| 고정 인덕터 |
|
| 가변 인덕터 |
|
변압기
이것은 전자기 유도로 알려진 과정을 통해 한 수준에서 다른 수준으로 에너지를 변경하는 장치를 나타냅니다. 일반적으로 전력을 사용하는 애플리케이션에서 AC 전압을 높이거나 낮추는 데 사용됩니다.
변압기의 1 차측 전류가 변하면 코어에 다양한 자속이 생성되어 자기장의 형태로 변압기의 2 차 권선으로 퍼집니다.
변압기의 작동 원리는 패러데이의 전자기 유도 법칙에 의존합니다. 이 법칙은 시간에 대한 플럭스 연결의 변화율이 도체에서 유도 된 EMF와 직접 관련이 있다고 명시합니다.
변압기에는 세 가지 주요 부분이 있습니다.
- 1 차 권선
- 자기 코어
- 2 차 권선
변압기의 상징
추가 장치
전자기 장치
전자기학의 개념은 기술에서 널리 사용되며 모터, 발전기 및 전기 벨에 적용됩니다. 예를 들어, 초인종에서 전자기 구성 요소는 벨을 치는 클래퍼를 끌어 당겨 벨을 울립니다.
컨트롤러
컨트롤러는 프로세스에서 측정 된 변수에서 전송 된 전자 신호를 수신하고 얻은 값을 제어 설정 점과 비교하는 장치입니다. 디지털 알고리즘을 사용하여 기능을 연관시키고 비교합니다.
센서
센서는 전류를 결정하는 데 사용되며 제어를 위해 피드백을 제공하기 위해 지속적으로 변합니다. 전류 감지를 통해 부드럽고 정확한 컨버터 기능을 구현할 수 있습니다. 전류 센서는 병렬 또는 다상 변환기의 정보를 쉽게 공유 할 수 있도록 변환기에서 중요합니다.
필터
전자 필터는 원하지 않는 주파수를 제거하기 위해 신호 처리를 수행하는데도 사용됩니다. 이들은 아날로그 회로이며 활성 또는 수동 상태로 존재합니다.
실리콘 제어 정류기 또는 반도체 제어 정류기는 4 층 고체 전류 제어 장치입니다. "실리콘 제어 정류기"라는 이름은 사이리스터 유형에 대한 General Electric의 상표명입니다.
SCR은 주로 고전압 및 전력 제어가 필요한 전자 장치에 사용됩니다. 따라서 모터 제어 기능과 같은 중간 및 높은 AC 전원 작동에 적용 할 수 있습니다.
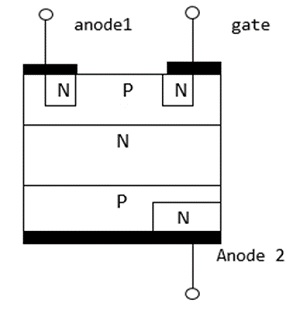
SCR은 다이오드처럼 게이트 펄스가 적용될 때 전도됩니다. 그것은 두 개의 구조를 형성하는 네 개의 반도체 층을 가지고 있습니다. NPNP 또는 PNPN. 또한 J1, J2 및 J3으로 표시된 3 개의 접합과 3 개의 단자 (양극, 음극 및 게이트)가 있습니다. SCR은 아래와 같이 다이어그램으로 표시됩니다.
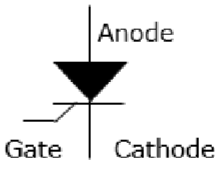
양극은 아래 그림과 같이 P 형에 연결되고 음극은 N 형에 연결되며 게이트는 P 형에 연결됩니다.
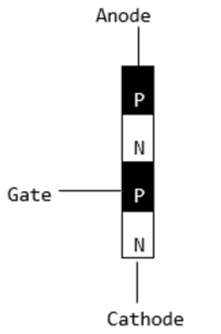
SCR에서 고유 반도체는 필요한 도펀트가 주입되는 실리콘입니다. 그러나 PNPN 접합 도핑은 SCR 애플리케이션에 따라 다릅니다.
SCR의 작동 모드
OFF state (forward blocking mode)− 여기서 양극에는 양의 전압이 할당되고 게이트에는 제로 전압 (연결 해제)이 할당되고 음극에는 음의 전압이 할당됩니다. 결과적으로 접합 J1과 J3은 순방향 바이어스에 있고 J2는 역방향 바이어스에 있습니다. J2는 고장 눈사태 값에 도달하고 수행을 시작합니다. 이 값보다 낮 으면 J1의 저항이 상당히 높아서 오프 상태라고합니다.
ON state (conducting mode)− SCR은 애벌랜치 전압 이상으로 양극과 음극 사이의 전위차를 증가 시키거나 게이트에 양의 신호를 적용하여이 상태가됩니다. 즉시 SCR이 전도되기 시작하면 게이트 전압이 더 이상 ON 상태를 유지하는 데 필요하지 않으므로-
그것을 통과하는 전류 흐름을 유지 전류라는 가장 낮은 값으로 줄입니다.
접합부에 배치 된 트랜지스터를 사용합니다.
Reverse blocking− 순방향 전압 강하를 보상합니다. 이는 P1에서 낮은 도핑 영역이 필요하기 때문입니다. 순방향 및 역방향 차단의 정격 전압이 동일하다는 점에 유의하는 것이 중요합니다.
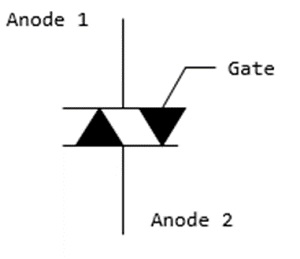
약어 TRIAC는 Triode for Alternating Current를 나타냅니다. TRIAC는 전류의 흐름을 제어하는 3 개의 단자가있는 반도체 장치이므로 Triac이라고합니다. SCR과 달리 TRIAC는 양방향이고 SCR은 양방향입니다. 교류 사이클에서 양쪽 절반에 대한 전류 흐름을 제어 할 수 있기 때문에 스위칭 목적으로 AC 전원을 사용하는 작동에 이상적입니다. 이것은 아래 다이어그램에 명확하게 설명되어 있습니다.
TRIAC 기호
TRIAC의 회로도는 다음과 같습니다. 두 개의 사이리스터가 연속적으로 배치 된 것과 비슷합니다.
TRIAC 구조
TRIAC 구조는 장치 제어를 보장하기 위해 추가 게이트 접점이 통합 된 DIAC로 간주됩니다. 다른 전력 장치와 마찬가지로 TRIAC는 실리콘으로 제조됩니다. 결과적으로 실리콘을 제조하는 프로세스는 더 저렴한 장치의 생산으로 이어집니다. 아래에 표시된대로 TRIAC에는 6 개의 영역이 있습니다. 4 개의 N 형 영역과 2 개의 P 형 영역.
TRIAC 작동
TRIAC의 작동은 사이리스터를 기반으로합니다. AC 전기 부품 및 시스템의 스위칭 기능을 용이하게합니다. AC 사이클의 절반을 모두 활용할 수 있기 때문에 조광기에 널리 사용됩니다. 결과적으로 전력 사용량이 더 효율적입니다. TRIAC 기능을 위해 사이리스터를 사용할 수있는 한 저전력이 필요한 작업에는 비용 효율적이지 않습니다. 두 개의 사이리스터로 TRIAC를 볼 수 있습니다.

TRIAC는 일반적으로 작동시 비대칭 스위칭을 나타내므로 매우 높은 전력이 필요하지 않은 애플리케이션에 사용됩니다. 이는 전자기 간섭을 유발하므로 고전력을 사용하는 애플리케이션에 불리합니다. 그 결과, TRIAC는 모터 제어, 가벼운 주거용 조명 조광기 및 소형 전기 팬에 사용되어 속도를 제어합니다.
BJT (Bipolar Junction Transistor)는 두 개의 반도체에 의해 만들어진 접점에 따라 작동이 달라지는 트랜지스터입니다. 스위치, 증폭기 또는 오실레이터로 작동 할 수 있습니다. 작동에는 두 가지 유형의 전하 캐리어 (정공과 전자)가 필요하기 때문에 바이폴라 트랜지스터로 알려져 있습니다. 정공은 P 형 반도체에서 지배적 인 전하 캐리어를 구성하는 반면 전자는 N 형 반도체에서 주요 전하 운반자입니다.
BJT의 상징

BJT의 구조
BJT에는 두 개의 PN 접합이 연속적으로 연결되어 있고 공통 영역 B (베이스)를 공유합니다. 이렇게하면베이스, 컬렉터 및 이미 터 인 모든 영역에서 접촉이 이루어집니다. PNP 바이폴라 트랜지스터의 구조는 다음과 같습니다.
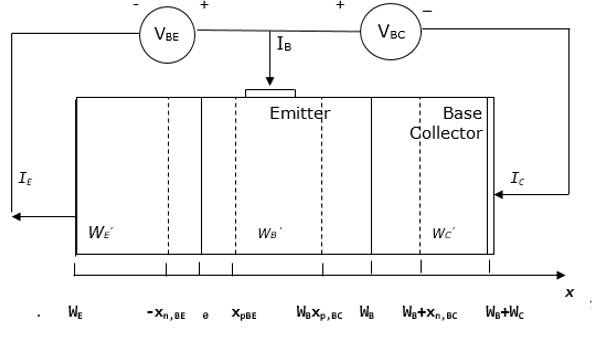
위에 표시된 BJT는 연속적으로 연결된 두 개의 다이오드로 구성되어 준 중성 (quasi-neutral)이라는 영역이 고갈됩니다. 이미 터,베이스 및 수집기의 준 중립 폭은 위에 W E ', W B '및 W C '로 표시됩니다. 그들은 다음과 같이 얻습니다-
$$W_{E}^{'}=W_{E}-X_{n,BE}$$ $$W_{B}^{'}=W_{B}-X_{p,BE}-X_{p,BC}$$ $$W_{C}^{'}=W_{C}-X_{n,BC}$$이미 터,베이스 및 컬렉터의 전류 기호는 각각 I E , I B 및 I C로 표시 됩니다. 따라서 컬렉터 및베이스 전류는 양의 전류가 컬렉터 또는베이스 접점을 만날 때 양의 값입니다. 또한 에미 터 전류는 전류가 에미 터 접점을 떠날 때 양수입니다. 그러므로,
$$I_{E}=I_{B}+I_{C}$$컬렉터 및 이미 터에 대해베이스 접점에 양의 전압이인가되면베이스 컬렉터 전압과베이스 이미 터 전압이 양이됩니다.
단순화를 위해 V CE 는 0으로 가정합니다.
전자의 확산은 이미 터에서베이스로 발생하는 반면 정공의 확산은베이스에서 이미 터로 발생합니다. 전자가베이스 컬렉터 고갈 영역에 도달하면 전기장에 의해 영역을 휩쓸어갑니다. 이 전자는 콜렉터 전류를 형성합니다.
BJT가 순방향 활성 모드에서 바이어스되면 총 이미 터 전류는 전자 확산 전류 ( I E, n ), 정공 확산 전류 ( I E, p ) 및 베이스 이미 터 전류를 추가 하여 얻습니다.
$$I_{E}=I_{E,n}+I_{E,p}+I_{r,d}$$총 콜렉터 전류는 전자 확산 전류 ( I E, n )에서 기본 재결합 전류 ( I r, B )를 뺀 값 입니다.
$$I_{C}=I_{E,n}-I_{r,B}$$베이스 전류 I B 의 합은 정공 확산 전류 ( I E, p ),베이스 재결합 전류 ( I r, B ) 및 공 핍층의베이스 이미 터 재결합 전류 ( I r, d ) 를 더하여 얻습니다 .
$$I_{B}=I_{E,p}+I_{r,B}+I_{r,d}$$운송 계수
이것은 콜렉터 전류와 이미 터 전류의 비율로 제공됩니다.
$$\alpha =\frac{I_{C}}{I_{E}}$$Kirchhoff의 현재 법칙을 적용하면 기본 전류가 이미 터 전류와 콜렉터 전류의 차이에 의해 제공되는 것으로 나타났습니다.
현재 이득
이것은베이스 전류에 대한 콜렉터 전류의 비율로 제공됩니다.
$$\beta =\frac{I_{C}}{I_{B}}=\frac{\alpha }{1-\alpha }$$위는 BJT가 전류 증폭을 생성하는 방법을 설명합니다. 컬렉터 전류가 이미 터 전류와 거의 동일하면 전송 계수 (α)가 1에 가까워집니다. 따라서 전류 이득 (β)은 1보다 커집니다.
추가 분석을 위해 전송 계수 (α)는 에미 터 효율 (γ E ), 기본 전송 계수 (α T ) 및 공 핍층의 재결합 계수 (δ r ) 의 곱으로 다시 작성됩니다 . 다음과 같이 다시 작성됩니다-
$$\alpha =\gamma _{E}\times \alpha _{T}\times \delta _{r}$$다음은 논의 된 이미 터 효율, 기본 전송 계수 및 공 핍층 재결합 계수에 대한 요약입니다.
이미 터 효율
$$\gamma _{E}=\frac{I_{E,n}}{I_{E,p}+I_{E,P}}$$기본 운송 계수
$$\alpha _{T}=\frac{I_{E,n}-I_{r,b}}{I_{E,n}}$$공 핍층 재조합 인자
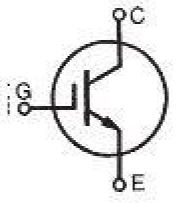
$$\delta _{r}=\frac{I_{E}-I_{r,d}}{I_{E,n}}$$절연 게이트 바이폴라 트랜지스터 (IGBT)는 3 개의 단자를 가진 반도체 장치로 주로 전자 스위치로 사용됩니다. 빠른 스위칭과 고효율이 특징이며 램프 안정기, 전기 자동차 및 가변 주파수 드라이브 (VFD)와 같은 최신 가전 제품에 필요한 구성 요소입니다.
빠르게 켜고 끌 수있는 기능으로 인해 펄스 폭 변조로 복잡한 파형 패턴을 처리하는 증폭기에 적용 할 수 있습니다. IGBT는 MOSFET과 BJT의 특성을 결합하여 각각 고전류 및 저 포화 전압 용량을 달성합니다. FET (전계 효과 트랜지스터)를 사용하여 절연 게이트를 통합하여 제어 입력을 얻습니다.
IGBT 기호
IGBT의 증폭은 출력 신호와 입력 신호의 비율로 계산됩니다. 기존 BJT에서 이득의 정도 (β)는 입력 전류에 대한 출력 전류의 비율과 같습니다.
IGBT는 MOSFET보다 ON 상태 저항 (RON) 값이 매우 낮습니다. 이는 특정 스위칭 동작에 대한 바이폴라 양단 의 전압 강하 (I 2 R)가 매우 낮음을 의미합니다. IGBT의 순방향 차단 동작은 MOSFET의 동작과 유사합니다.
IGBT가 정적 상태에서 제어 스위치로 사용되는 경우 전류 및 전압 등급은 BJT와 동일합니다. 반대로 IGBT의 절연 게이트는 BJT 충전을 더 쉽게 구동 할 수있게하여 전력이 덜 필요합니다.
IGBT는 게이트 터미널의 활성화 또는 비활성화 여부에 따라 ON 또는 OFF로 전환됩니다. 게이트와 이미 터에서 일정한 양의 전위차가 IGBT를 ON 상태로 유지합니다. 입력 신호가 제거되면 IGBT가 꺼집니다.
IGBT 작동 원리
IGBT는 BJT와 달리 장치에서 전도를 유지하기 위해 작은 전압 만 필요합니다. IGBT는 단방향 장치입니다. 즉, 순방향으로 만 켜질 수 있습니다. 이는 양방향 MOSFET과 달리 콜렉터에서 이미 터로 전류가 흐른다는 것을 의미합니다.
IGBT의 응용
IGBT는 견인 모터와 같은 중전 력에서 초고 전력 애플리케이션에 사용됩니다. 대형 IGBT에서는 100 암페어 범위의 고전류와 최대 6kv의 차단 전압을 처리 할 수 있습니다.
IGBT는 반도체 스위칭이 필요한 컨버터, 인버터 및 기타 기기와 같은 전력 전자 장치에도 사용됩니다. 양극은 고전류 및 전압으로 제공됩니다. 그러나 스위칭 속도는 느립니다. 반대로 MOSFET은 비싸지 만 스위칭 속도가 빠릅니다.
금속 산화물 반도체 전계 효과 트랜지스터 (MOSFET)는 전자 신호를 전환하는 데 사용되는 트랜지스터 유형입니다. 즉, 4 개의 터미널이 있습니다. 소스 (S), 드레인 (D), 게이트 (G) 및 바디 (B) MOSFET의 바디는 일반적으로 소스 (S)의 단자에 연결되어 다른 전계 효과 트랜지스터와 유사한 3 단자 장치 ( FET). 이 두 개의 주요 단자는 일반적으로 단락을 통해 상호 연결되므로 전기 다이어그램에는 세 개의 단자 만 표시됩니다.
디지털 및 아날로그 회로에서 가장 일반적인 장치입니다. 일반 트랜지스터에 비해 MOSFET은 스위치를 켜기 위해 낮은 전류 (1 밀리 암페어 미만)가 필요합니다. 동시에 50A 이상의 고전류 부하를 제공합니다.
MOSFET의 작동
MOSFET에는 커패시터 플레이트 역할을하는 얇은 이산화 규소 층이 있습니다. 제어 게이트의 절연은 MOSFET의 저항을 매우 높은 수준 (거의 무한)으로 높입니다.
게이트 터미널은 1 차 전류 경로에서 차단됩니다. 따라서 전류가 게이트로 누출되지 않습니다.
MOSFET은 두 가지 주요 형태로 존재합니다.
Depletion state− 컴포넌트를 끄 려면 게이트 소스 전압 (V GB ) 이 필요합니다 . 게이트가 0 (V GB )에있을 때 장치는 일반적으로 켜져 있으므로 주어진 논리 회로에 대한 부하 저항으로 작동합니다. N 형 고갈이있는로드 장치의 경우, 3V는 게이트를 음의 3V로 전환하여 장치가 꺼지는 임계 전압입니다.
Enhancement state− 이 상태에서 구성 요소를 켜려면 게이트 소스 전압 (V GB )이 필요합니다. 게이트가 0 (V GB ) 일 때 장치는 일반적으로 꺼져 있으며 게이트 전압이 소스 전압보다 높은지 확인하여 스위치를 켤 수 있습니다.
기호 및 기본 구조

어디, D − 배수; G − 게이트 S− 출처 과Sub − 기판
A (BJT)는 1mA의 전류를 방출하며 이미 터 효율은 0.99입니다. 기본 전송 계수는 0.994이고 공 핍층 재결합 계수는 0.997입니다. BJT의 경우 다음을 계산하십시오-
수송 요인
재 작성된 전송 계수는 다음과 같습니다.
$$\alpha =\gamma _{E}\times \alpha _{T}\times \delta _{r}$$값을 대체하면
$$\alpha =0.99\times 0.994\times 0.997=0.981$$현재 이득
현재 이득은-
$$\beta =\frac{I_{C}}{I_{B}}=\frac{\alpha }{1-\alpha }$$값을 대체하면
$$\beta =\frac{0.981}{1-0.981}=51.6$$콜렉터 전류
$$I_{C}=\alpha \times I_{E}=0.981\times 1=0.981mA$$베이스 전류
$$I_{B}=I_{E}-I_{C}=1-0.981=19\mu A$$위상 제어 컨버터
위상 제어 컨버터는 AC를 DC 에너지로 변환합니다 (라인 정류). 즉, 고정 주파수 및 고정 전압 AC 전력을 가변 DC 전압 출력으로 변환하는 데 사용됩니다. 다음과 같이 표현됩니다.
Fixed Input − 전압, 주파수 및 AC 전원
Variable output − DC 전압 출력
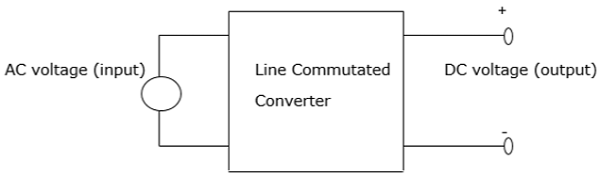
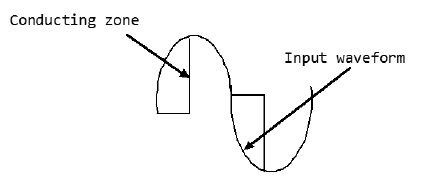
컨버터로 들어가는 AC 입력 전압은 일반적으로 고정 RMS (제곱 평균 제곱근) 및 고정 주파수입니다. 컨버터에 위상 제어 사이리스터가 포함되어있어 가변 DC 출력 전압을 얻을 수 있습니다. 이것은 사이리스터가 트리거되는 위상 각을 변경함으로써 가능합니다. 그 결과 부하 전류의 맥동 파형이 얻어진다.
입력 공급 하프 사이클 동안 사이리스터는 순방향 바이어스에 있으며 충분한 게이트 펄스 (트리거)를 적용하여 켜집니다. 사이리스터가 켜지면 전류가 흐르기 시작합니다. 즉, 지점 ωt = α에서 지점 ωt = β까지입니다. 부하 전류가 0으로 떨어지는 순간 사이리스터는 라인 (자연) 정류의 결과로 꺼집니다.
자연 정류를 활용하는 많은 전력 변환기가 있습니다. 여기에는-
- AC-DC 컨버터
- AC-AC 컨버터
- AC 전압 컨트롤러
- Cycloconverters
위의 전력 변환기는이 튜토리얼의 다음 장에서 설명합니다.
2- 펄스 변환기
레벨 2 펄스 폭 변조기 (PWM) 발생기로도 알려진 2 상 펄스 변환기는 반송파 기반의 펄스 폭 변조 변환기에 대한 펄스를 생성하는 데 사용됩니다. 레벨 2 토폴로지를 활용하여이를 수행합니다. 이 블록은 세 가지 유형의 컨버터에 존재하는 IGBT 및 FET와 같은 제어 목적으로 스위칭 장치를 제어합니다.
- 암 1 개 (단상 하프 브리지)
- 암 2 개 (단상 풀 브리지)
- 팔 3 개 (삼상 브리지)
2 펄스 컨버터의 기준 입력 신호는 반송파와 비교됩니다. 기준 입력 신호가 반송파보다 큰 경우 펄스는 상위 장치의 경우 1이고 하위 장치의 경우 0입니다.
단상 풀 브리지 (2 암)가있는 장치를 제어하려면 단극 또는 양극 펄스 폭 변조를 적용해야합니다. 단극 변조에서는 두 팔 각각이 독립적으로 제어됩니다. 두 번째 기준 입력 신호는 초기 기준점에서 180 ° 이동하여 내부적으로 생성됩니다.
바이폴라 PWM이 적용될 때 두 번째 단상 풀 브리지의 하단 스위칭 장치의 상태는 첫 번째 단상 풀 브리지 장치의 상단 스위치와 유사합니다. 단극 변조를 사용하면 AC 파형이 매끄러 워지고 양극 변조는 전압 변동이 적습니다.
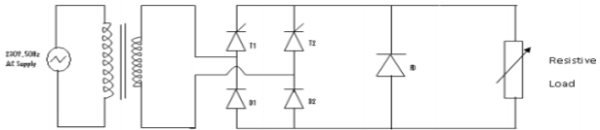
3 펄스 컨버터
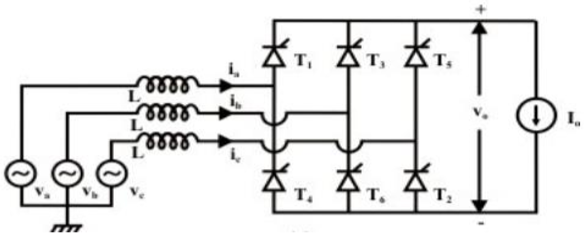
각 사이리스터가 공급주기의 세 번째 동안 전도 모드에있는 3 상 3 펄스 컨버터를 고려하십시오. 사이리스터가 전도로 트리거되는 가장 빠른 시간은 위상 전압을 기준으로 30 °입니다.
작동은 3 개의 사이리스터와 3 개의 다이오드를 사용하여 설명됩니다. 사이리스터 T1, T2 및 T3가 다이오드 D1, D2 및 D3으로 대체되면 전도는 각각 위상 전압 u an , u bn 및 u cn 에 대해 30 ° 각도에서 시작 됩니다. 따라서 발사각 α는 이에 해당하는 위상 전압을 기준으로 초기 30 °에서 측정됩니다.
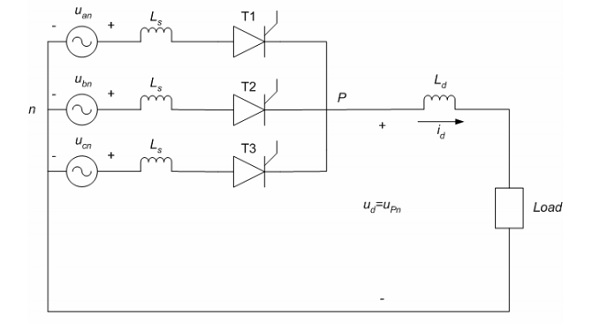
전류는 사이리스터를 통해 한 방향으로 만 흐를 수 있는데, 이는 전력이 DC 측에서 AC 측으로 흐르는 인버터 작동 모드와 유사합니다. 또한, 사이리스터의 전압은 발사 각도를 제어하여 제어됩니다. 이는 α = 0 (정류기에서 가능) 일 때 달성됩니다. 따라서 3 펄스 컨버터는 인버터 및 정류기 역할을합니다.
6 펄스 컨버터
아래 그림은 3 상 소스에 연결된 6 펄스 브리지 제어 컨버터를 보여줍니다. 이 변환기에서 펄스의 수는 위상의 두 배입니다.p = 2m. 동일한 컨버터 구성을 사용하면 6 펄스의 두 브리지를 결합하여 12 개 이상의 펄스 컨버터를 얻을 수 있습니다.
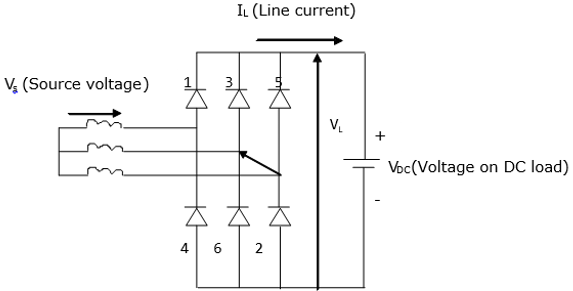
정류를 사용할 수없는 경우 특정 시간에 두 개의 다이오드가 전도됩니다. 또한 부하에서 전압 강하를 얻으려면 두 개의 다이오드가 브리지의 반대쪽 다리에 위치해야합니다. 예를 들어 다이오드 3과 6은 동시에 켜질 수 없습니다. 따라서 DC 부하의 전압 강하는 3 상 소스의 라인 전압 VL의 조합입니다.
펄스 수가 많을수록 컨버터의 활용도가 높아진다는 점에 유의해야합니다. 또한 펄스 수가 적을수록 컨버터의 활용도가 낮아집니다.
대부분의 컨버터 분석은 일반적으로 이상적인 조건 (소스 임피던스 없음)에서 단순화됩니다. 그러나 소스 임피던스는 일반적으로 무시할 수있는 저항 요소로 유도 성이므로이 가정은 정당화되지 않습니다.
소스 인덕턴스는 그 존재가 컨버터의 출력 전압을 변경하기 때문에 컨버터 성능에 상당한 영향을 미칩니다. 결과적으로 출력 전압은 부하 전류가 감소함에 따라 감소합니다. 또한 입력 전류 및 출력 전압 파형이 크게 변경됩니다.
컨버터에 대한 소스 인덕턴스 효과는 다음 두 가지 방법으로 분석됩니다.
단상에 대한 영향
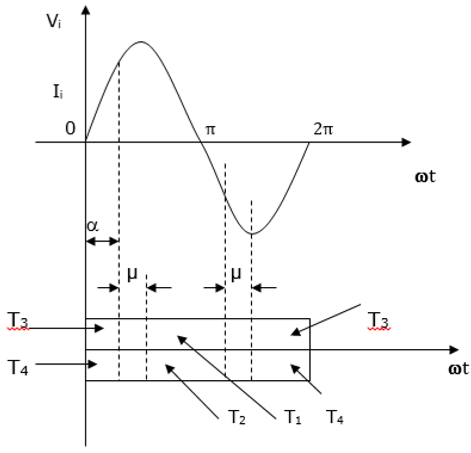
컨버터가 전도 모드에서 작동하고 부하 전류의 리플이 무시할 수 있다고 가정하면 개방 회로 전압은 점화 각도 α에서 평균 DC 출력과 같아집니다. 아래 다이어그램은 소스가 단상 인 완전 제어 컨버터를 보여줍니다. 사이리스터 T 3 및 T 4 는 t = 0 일 때 전도 모드로 가정됩니다. 반면에 T 1 및 T 2는 ωt = α 일 때 발화합니다.

어디-
- V i = 입력 전압
- 나는 나는 = 입력 전류
- V o = 출력 전압
- I o = 출력 전압
소스 인덕턴스가 없으면 T 3 및 T 4 에서 정류가 발생합니다 . 즉시 사이리스터 T 1 및 T 2 가 켜집니다. 이렇게하면 입력 극성이 즉시 변경됩니다. 소스 인덕턴스가있는 경우 극성 및 정류의 변화가 즉시 발생하지 않습니다. 따라서 T 3 및 T 4 는 T 1 및 T 2 가 켜지는 즉시 정류되지 않습니다 .
일정한 간격으로 네 개의 사이리스터가 모두 전도됩니다. 이 전도 간격을 중첩 간격 (μ)이라고합니다.
정류 중 겹침은 DC 출력 전압과 소멸 각 γ를 감소시켜 α가 180 °에 가까울 때 정류에 실패합니다. 이것은 아래 파형으로 표시됩니다.
삼상에 미치는 영향
단상 컨버터와 마찬가지로 소스 인덕턴스의 존재로 인해 순간 정류가 없습니다. 소스 인덕턴스를 고려하면 컨버터 성능에 미치는 영향 (정 성적)은 단상 컨버터에서와 동일합니다. 이것은 아래 다이어그램에 나와 있습니다.
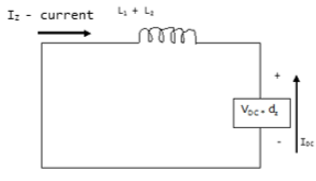
토폴로지가 단상 또는 다 상일 수있는 여러 컨버터의 성능 매개 변수를 결정하는 것이 중요합니다.
가정
- 사용 된 장치가 이상적입니다. 즉, 손실이 없습니다.
- 장치에는 저항 부하가 있습니다.
부하시 DC 전압
$$V_{DC}=\frac{1}{T} \int_{0}^{T}V_{L}\left ( t \right )dt$$부하시 RMS 전압
$$V_{L}=\sqrt{\frac{1}{T}}\int_{0}^{T}V_{L}^{2}\left ( t \right )dt$$폼 팩터
$$FF=\frac{V_{L}}{V_{DC}}$$리플 팩터
$$RF=\frac{\sqrt{V_{L}^{2}-V_{DC}^{2}}}{V_{DC}}=\sqrt{FF^{2}-1}$$효율 (정류 율)
$$\eta =\frac{P_{DC}}{P_{L}+P_{D}}$$위의 정의는-
$P_{DC}=V_{DC}\times I_{DC}$
$P_{L}=V_{L}\times I_{L}$
$P_{D}=R_{D}\times I_{L}^{2}$($P_{D}$ 정류기 손실이며 $R_{D}$ 저항)
$$\eta =\frac{V_{DC}I_{DC}}{\left ( V_{L}I_{L} \right )+\left ( R_{D}I_{L}^{2} \right )}=\frac{V_{DC}^{2}}{V_{L}^{2}}\times \frac{1}{1+\frac{R_{D}}{R_{L}}}$$그러나 $R_{D}=0$
따라서,
$$\eta =\left ( \frac{V_{DC}}{V_{L}} \right )^{2}=\left ( \frac{1}{FF}\right )^{2}$$변압기 활용 계수
$$TUF=\frac{P_{DC}}{VA \:Rating \:of \:the \:Transformer }=\frac{P_{DC}}{\frac{VA_{p}+VA_{s}}{2}}$$VA의 P 와 버지니아 들 변압기의 기본 및 보조 전원 등급입니다.
고전압 직류 (HVDC) 컨버터에서 스테이션은 라인 정류됩니다. 이것은 밸브의 초기 전류가 AC 형태의 컨버터 버스 전압의 0 값을 기준으로 만 지연 될 수 있음을 의미합니다. 결과적으로 더 나은 전압 제어를 위해 컨버터 버스는 무효 전원에 연결됩니다.
무효 전원은 정적 시스템에서 커패시터를 변경하는 데 사용됩니다. 무효 전력 시스템의 응답은 동적 조건에서 전압 제어에 의해 결정됩니다.
불안정한 AC 시스템을 작동 할 때 불안정한 전압 및 과전압 서지로 인해 문제가 발생하는 경향이 있습니다. 발사 각도의 제어를 단순화하려면 무효 전력 소스의 더 나은 조정이 필요합니다. 결과적으로 무효 전력 변환기의이 기능은 HVDC를 사용하는 최신 변환기에 점점 더 많이 적용되고 있습니다.
정상 상태의 무효 전력 제어
무효 전력을 유효 전력의 함수로 표현하는 방정식은 단위 수량으로 제공됩니다.
기본 컨버터 전압은 다음과 같습니다.
$$V_{db}=3\sqrt{\frac{2}{\pi }}\times V_{L}$$어디 VL = 선간 전압 (권선 측)
Base DC Current (Idb ) = 정격 DC 전류 (Idr)
Base DC Power (Pdc)= n b × V db × I db , 여기서nb = 직렬 교량 수
BaseBase AC voltage (Vb) = (Va)
Base AC Power = 기본 DC 전원
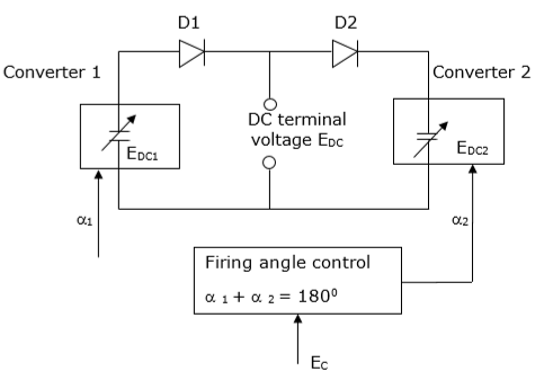
$$\sqrt{\frac{18}{\pi }}\times V_{a}\times I_{db}\times n_{b}$$이중 컨버터는 주로 가변 속도 드라이브 (VFD)에서 발견됩니다. 듀얼 컨버터에서는 두 개의 컨버터가 서로 연결되어 있습니다. 듀얼 컨버터의 작동은 아래 다이어그램을 사용하여 설명됩니다. 다음과 같이 가정합니다.
듀얼 컨버터는 터미널에서 이상적인 컨버터입니다 (순수 DC 출력 제공).
각 2- 사분면 컨버터는 다이오드와 직렬로 연결된 제어 된 DC 소스입니다.
다이오드 D1 및 D2는 단방향 전류 흐름을 보여줍니다.
순환 전류없이 작동하는 듀얼 컨버터를 고려하면 제어 된 점화 펄스에 의해 AC 전류가 흐르지 않습니다. 이렇게하면 부하 전류를 전달하는 컨버터가 전도되고 다른 컨버터가 차단됩니다. 이것은 변환기 사이의 리액터가 필요하지 않음을 의미합니다.
배터리 충전기
충전기로도 알려진 배터리 충전기는 전류를 사용하여 2 차 전지에 에너지를 저장합니다. 충전 과정은 배터리의 유형과 크기에 따라 결정됩니다. 배터리 유형에 따라 과충전 허용 수준이 다릅니다. 충전 프로세스는 정전압 또는 정전류 소스에 연결하여 수행 할 수 있습니다.
충전율 (C)
충전 속도는 배터리 충전 또는 방전 속도로 정의되며 1 시간 동안의 배터리 용량과 동일합니다.
배터리 충전기는 충전 속도 C로 지정됩니다. 예를 들어, C / 10 등급의 배터리 충전기는 10 시간 안에 충전 용량을 제공하고 3C 등급의 배터리 충전기는 20 분 안에 배터리를 충전합니다.
배터리 충전기의 유형
많은 종류의 배터리 충전기가 있습니다. 이 튜토리얼에서는 5 가지 주요 유형을 고려할 것입니다.
Simple chargers − 충전중인 배터리에 일정한 DC 전원을 공급하여 작동합니다.
Fast chargers − 제어 회로를 사용하여 배터리를 빠르게 충전하고 그 과정에서 배터리 셀이 손상되는 것을 방지합니다.
Inductive chargers − 전자기 유도를 사용하여 배터리를 충전합니다.
Intelligent chargers − 통신하는 칩이 포함 된 배터리를 충전하는 데 사용됩니다. the 스마트 충전기.
Motion powered charger− 사람의 움직임을 이용하여 배터리를 충전합니다. 두 스프링 사이에 놓인 자석은 사람의 움직임에 의해 위아래로 움직여 배터리를 충전합니다.
별도로 여기 된 DC 모터에는 220V, 100A 및 1450rpm의 매개 변수가 있습니다. 전기자는 0.1Ω의 저항을 가지고 있습니다. 또한 주파수가 50Hz이고 유도 성 리액턴스가 0.5Ω 및 50Hz 인 3 상 AC 소스에 연결된 3 상 완전 제어형 컨버터에서 공급됩니다. α = 0에서 모터 작동은 정격 토크 및 속도입니다. 모터 브레이크가 정격 속도에서 역방향을 사용하여 회생한다고 가정합니다. 정류가 영향을받지 않는 최대 전류를 계산합니다.
Solution −
우리는 알고 있습니다.
$$V_{db}=3\sqrt{\frac{2}{\pi }}\times V_{L}-\frac{3}{\pi }\times R_{b}\times I_{db}$$값을 대체하면,
$220=3\sqrt{\frac{2}{\pi }}\times V_{L}-\frac{3}{\pi }\times 0.5\times 100$
따라서,
$V_{L}=198V$
정격 속도에서의 전압 = $220-\left ( 100\times 0.1 \right )=210V$
정격 속도에서 역방향으로 회생 제동,
$=3\sqrt{\frac{2}{\pi }}\times 198\cos \alpha -\left ( \frac{3}{\pi }\times 0.5+0.1\right )\times I_{db}=-210V$
그러나 $\cos \alpha -\cos \left ( \mu +\alpha \right )=\frac{\sqrt{2}}{198}\times 0.5I_{db}$
정류가 실패하려면 다음 제한 조건을 충족해야합니다.
$\mu +\alpha \approx 180^{\circ}$
따라서, $\quad \cos \alpha =\frac{I_{db}}{198\sqrt{2}}-1$
또한,
$\frac{3}{\pi }I_{db}-\frac{3\sqrt{2}}{\pi }\times 198-\left ( \frac{3}{\pi }\times 0.5+0.1 \right )I_{db}=-210$
이것은 준다, $\quad 0.3771I_{db}=57.4$
따라서, $\quad I_{db}=152.2A$
초퍼는 고속을 사용하여 소스 부하에 연결하고 분리합니다. 전원 스위치 ON / OFF를 지속적으로 트리거하여 고정 DC 전압이 간헐적으로 소스 부하에 적용됩니다. 전원 스위치가 ON 또는 OFF 상태를 유지하는 시간을 각각 초퍼의 ON 및 OFF 상태 시간이라고합니다.
초퍼는 주로 전기 자동차, 풍력 및 태양 에너지 변환, DC 모터 레귤레이터에 적용됩니다.
헬기의 상징
헬기의 분류
전압 출력에 따라 초퍼는 다음과 같이 분류됩니다.
- 스텝 업 초퍼 (부스트 컨버터)
- 스텝 다운 초퍼 (벅 컨버터)
- 스텝 업 / 다운 초퍼 (벅-부스트 컨버터)
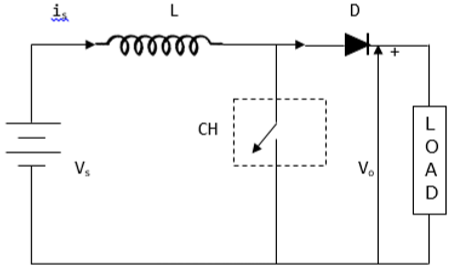
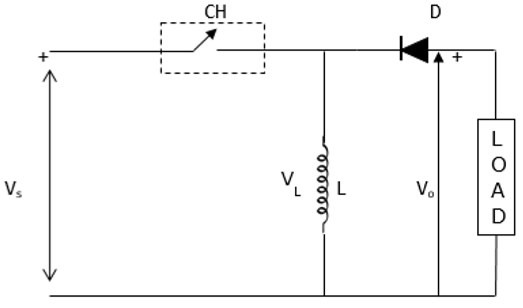
스텝 업 초퍼
스텝 업 초퍼 의 평균 전압 출력 (V o )은 전압 입력 (V s ) 보다 큽니다 . 아래 그림은 스텝 업 초퍼의 구성을 보여줍니다.
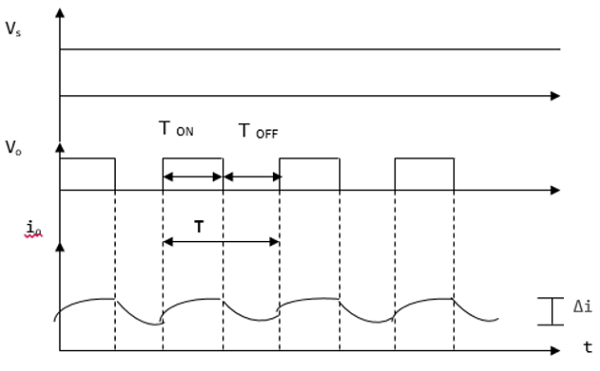
전류 및 전압 파형
V 0 (평균 전압 출력)은 아래 파형과 같이 쵸퍼가 켜지면 양수이고 쵸퍼가 꺼져 있으면 음수입니다.
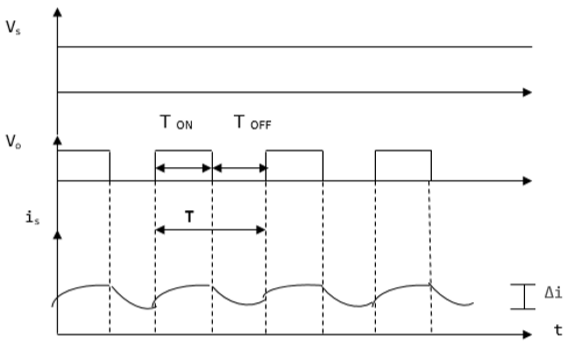
어디
T ON – 초퍼가 켜진 시간 간격
T OFF – 초퍼가 꺼진 시간 간격
V L – 부하 전압
V s – 소스 전압
T – 쵸핑 기간 = T ON + T OFF
V o 는-
$$V_{0}=\frac{1}{T}\int_{0}^{T_{ON}}V_{S}dt$$초퍼 (CH)가 켜지면 부하가 단락되어 일정 기간 동안 전압이 출력됩니다. TON0입니다. 또한이 시간 동안 인덕터가 충전됩니다. 이것은 V S = V L을 제공합니다.
$L\frac{di}{dt}=V_{S},$ $\frac{\Delta i}{T_{ON}}=\frac{V_{S}}{L}$
그 후,$\Delta i=\frac{V_{S}}{L}T_{ON}$
Δi = 인덕터 피크 대 피크 전류입니다. 초퍼 (CH)가 OFF 인 경우, 방전이 때문에, 인덕터 (L)를 통해 V의 합산 발생 들 및 V L은 다음과 같이 주어진다 -
$V_{0}=V_{S}+V_{L},\quad V_{L}=V_{0}-V_{S}$
그러나 $L\frac{di}{dt}=V_{0}-V_{S}$
그러므로,$L\frac{\Delta i}{T_{OFF}}=V_{0}-V_{S}$
이것은 준다,$\Delta i=\frac{V_{0}-V_{S}}{L}T_{OFF}$
ON 상태에서 Δi를 OFF 상태에서 Δi로 동일시하면-
$\frac{V_{S}}{L}T_{ON}=\frac{V_{0}-V_{S}}{L}T_{OFF}$, $V_{S}\left ( T_{ON}+T_{OFF} \right )=V_{0}T_{OFF}$
$V_{0}=\frac{TV_{S}}{T_{OFF}}=\frac{V_{S}}{\frac{\left ( T+T_{ON} \right )}{T}}$
이것은 평균 전압 출력을 다음과 같이 제공합니다.
$$V_{0}=\frac{V_{S}}{1-D}$$위의 방정식은 V o 가 V S 에서 무한대 로 변할 수 있음을 보여줍니다 . 출력 전압이 항상 입력 전압보다 높으므로 전압 레벨을 높이거나 높입니다.
스텝 다운 쵸퍼
이것은 벅 컨버터라고도합니다. 이 초퍼에서 평균 전압 출력 V O 는 입력 전압 V S 보다 작습니다 . 초퍼가 켜져있을 때 V O = V S 이고, 초퍼가 꺼져있을 때 V O = 0
헬기가 ON 일 때 −
$V_{S}=\left ( V_{L}+V_{0} \right ),\quad V_{L}=V_{S}-V_{0},\quad L\frac{di}{dt}=V_{S}-V_{0},\quad L\frac{\Delta i}{T_{ON}}=V_{s}+V_{0}$
따라서 피크 대 피크 전류 부하는 다음과 같이 제공됩니다.
$\Delta i=\frac{V_{s}-V_{0}}{L}T_{ON}$
회로도
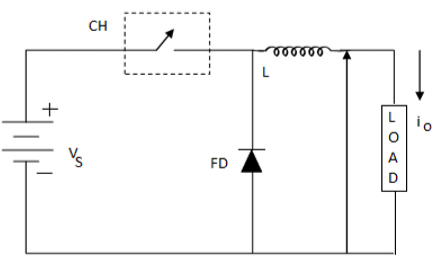
어디 FD 자유 바퀴 다이오드입니다.
초퍼가 꺼지면 인덕터에서 극성 반전 및 방전이 발생합니다. 전류는 프리휠 다이오드와 인덕터를 통해 부하로 전달됩니다. 이것은 준다,
$$L\frac{di}{dt}=V_{0}........................................\left ( i \right )$$다음으로 다시 작성-$\quad L\frac{\Delta i}{T_{OFF}}=V_{0}$ $$\Delta i=V_{0}\frac{T_{OFF}}{L}...................................\left ( ii \right )$$
방정식 (i)와 (ii)는 다음과 같습니다.
$\frac{V_{S}-V_{0}}{L}T_{ON}=\frac{V_{0}}{L}T_{OFF}$
$\frac{V_{S}-V_{0}}{V_{0}}=\frac{T_{OFF}}{T_{ON}}$
$\frac{V_{S}}{V_{0}}=\frac{T_{ON}-T_{OFF}}{T_{ON}}$
위의 방정식은 다음과 같습니다.
$$V_{0}=\frac{T_{ON}}{T}V_{S}=DV_{S}$$방정식 (i)는-
$\Delta i=\frac{V_{S}-DV_{S}}{L}DT$, 보낸 사람 $D=\frac{T_{ON}}{T}$
$=\frac{V_{S}-\left ( 1-D \right )D}{Lf}$
$f=\frac{1}{T}=$도마 빈도
전류 및 전압 파형
전류 및 전압 파형은 다음과 같습니다.
스텝 다운 초퍼의 경우 전압 출력은 항상 전압 입력보다 작습니다. 이것은 아래 파형으로 표시됩니다.
스텝 업 / 스텝 다운 헬기
이것은 벅-부스트 컨버터라고도합니다. 전압 입력 레벨을 높이거나 낮출 수 있습니다. 아래 다이어그램은 벅-부스트 초퍼를 보여줍니다.
초퍼가 ON으로 전환되면, 인덕터 (L)는 소스 전압 V로 대전된다 (S) . 따라서, V S = V L .
$$L\frac{di}{dt}=V_{S}$$ $$\Delta i=\frac{V_{S}}{L}T_{ON}=\frac{V_{S}}{L}T\frac{T_{ON}}{T}=\frac{DV_{S}}{Lf}$$왜냐하면-
$D=\frac{T_{ON}}{T}$ 과 $f=\frac{1}{T} .............................................. \left ( iii \right )$
초퍼가 꺼지면 인덕터의 극성이 반전되어 다이오드와 부하를 통해 방전됩니다.
그 후,
$$V_{0}=-V_{L}$$ $$L\frac{di}{dt}=-V_{0}$$$L\frac{\Delta i}{T_{OFF}}=-V_{0}$, 따라서 $\Delta i=-\frac{V_{0}}{L}T_{OFF}................................\left ( iv \right )$
방정식 (iii)과 (iv)를 평가하면-
$\frac{DV_{S}}{Lf}=-\frac{V_{0}}{L}T_{OFF}$, $DV_{S}=-DV_{S}=-V_{0}T_{OFF}f$
$DV_{S}=-V_{0}\frac{T-T_{ON}}{T}=-V_{0}\left ( 1-\frac{T_{ON}}{T} \right )$, $V_{0}=-\frac{DV_{S}}{1-D}$
때문에 $D=\frac{T_{ON}}{T}=\frac{T-T_{OFF}}{1-D}$
이것은 준다,
$V_{0}=\frac{DV_{S}}{1-D}$
D는 0에서 1까지 다양 할 수 있습니다. 때, D = 0; V O = 0
경우 D = 0.5, V O = V S
하면 D = 1, V O = ∞.
따라서 간격 0 ≤ D ≤ 0.5에서 출력 전압은 0 ≤ V O <V S 범위에서 변하고 스텝 다운 또는 벅 작동이 발생합니다. 반면 간격 0.5 ≤ D ≤ 1에서 출력 전압은 V S ≤ V O ≤ ∞ 범위에서 변하고 스텝 업 또는 부스트 작동을 얻습니다.
컨버터에는 출력 전압을 변경하는 데 사용되는 두 가지 기본 제어 방법이 있습니다. 이것들은-
- 시간 비율 제어
- 전류 제한 제어
시간 비율 제어
시간 비율 제어에서 상수 k는 $\frac{T_{ON}}{T}$다양합니다. 상수 k를 듀티 비라고합니다. 시간 비율 제어는 두 가지 방법으로 달성 할 수 있습니다.
일정한 주파수
이 제어 방법에서 주파수 (f = 1 / T 0N )는 ON 시간 T가 변경되는 동안 일정하게 유지됩니다. 이를 펄스 폭 변조 (PWM)라고합니다.
가변 주파수
가변 주파수 기술에서 주파수 (f = 1 / T)는 ON 시간 T가 일정하게 유지되는 동안 변경됩니다. 이를 주파수 변조 제어라고합니다.
전류 제한 제어
DC-DC 컨버터에서 전류 값은 연속 전압의 최대 레벨과 최소 레벨 사이에서 다릅니다. 이 기술에서는 초퍼 (DC-DC 컨버터의 스위치)가 켜졌다가 꺼져 전류가 상한과 하한 사이에서 일정하게 유지되도록합니다. 전류가 최대 지점을 초과하면 초퍼가 꺼집니다.
스위치가 OFF 상태에있는 동안 전류는 다이오드를 통해 자유 로워지고 기하 급수적으로 떨어집니다. 초퍼는 전류가 최소 수준에 도달하면 켜집니다. 이 방법은 ON 시간 T가 일정하거나 주파수 (f = 1 / T) 일 때 사용할 수 있습니다.
공진 스위치 컨버터는 인덕터 및 커패시터 (LC) 네트워크가 있고 각 스위칭 기간 동안 전류 및 전압 파형이 정현파 방식으로 변하는 컨버터를 말합니다. 다양한 공진 스위치 컨버터가 있습니다.
- 공진 형 DC-DC 컨버터
- DC-AC 인버터
- 공진 형 AC 인버터에서 DC 컨버터로
이 튜토리얼에서는 공진 형 DC-DC 컨버터에 초점을 맞출 것입니다.
공진 형 DC-DC 컨버터
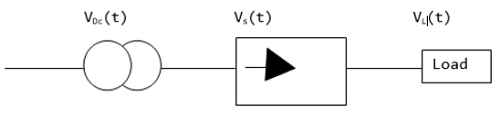
스위치 모드 전원 공급 장치 (SMPS)의 개념은 DC-DC 컨버터를 사용하여 아래에 설명되어 있습니다. 부하 에는 전압 공급 V IN 의 1 차 소스에서 얻은 정전압 공급 장치 (V OUT )가 제공 됩니다. V OUT 값은 직렬 저항 ( RS ) 또는 션트 ( I S )에 연결된 전류 소스 를 변경하여 조정됩니다 . V 제어함으로써 OUT을 변화 통해 I S를 하고 R 확보 S를 상당량의 전력은 컨버터 손실, 일정하게 유지된다.

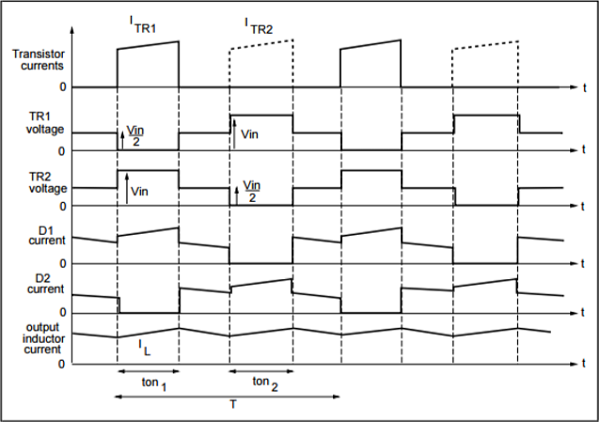
SMPS (Switched Mode Power Supply)
SMPS (switched mode power supply)는 전력을 효율적으로 변환하기 위해 스위칭 레귤레이터를 사용하는 전자 장치를 말합니다. SMPS는 주 전력선에서 전력을 가져와 부하로 전송합니다. 예를 들어, 컴퓨터는 전압 및 전류 특성을 확인하면서 변환됩니다.
SMPS와 선형 전원 공급 장치의 차이점은 전자가 낮은 손실 동안 계속 ON 및 OFF를 전환하고 높은 손실 영역에서 더 적은 시간을 사용한다는 것입니다. 이를 통해 낭비되는 에너지를 줄일 수 있습니다. 실제로 SMPS는 전력을 낭비하지 않습니다.
SMPS의 크기는 동일한 크기와 모양의 일반 선형 공급 전원 장치에 비해 작고 매우 가볍습니다.
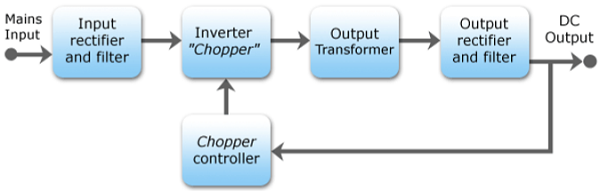
아래 그림은 SMPS의 회로도를 보여줍니다. 스위칭 주파수가 변경되면 저장된 에너지가 각 사이클마다 변경 될 수 있으므로 전압 출력이 변경됩니다.
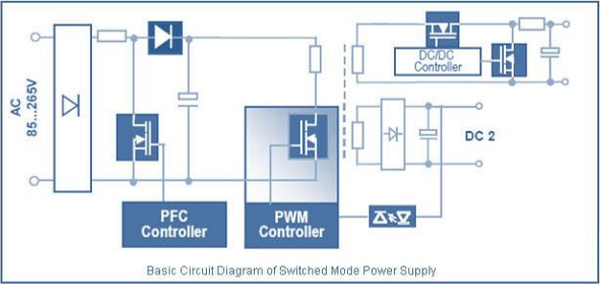
아래의 파형은 푸시 풀이라고도하는 하프 브리지 컨버터 용입니다. 고전력을 활용하는 애플리케이션에 사용됩니다. 입력 전압은 파형에 표시된대로 절반이됩니다.
스텝 업 초퍼의 입력 전압은 150V입니다. 필요한 전압 출력은 450V입니다. 사이리스터의 전도 시간은 150μ 초입니다. 도마 빈도를 계산하십시오.
Solution −
The chopping frequency (f)
$f=\frac{1}{T}$
어디 T – 자르기 기간 = $T_{ON}+T_{OFF}$
주어진- $V_{S}=150V$$V_{0}=450V$ $T_{ON}=150\mu sec$
$V_{0}=V_{S\left ( \frac{T}{T-T_{ON}} \right )}$
$450=150\frac{T}{T-150^{-6}}$ $T=225\mu sec$
그러므로 $f=\frac{1}{225\ast 10^{-6}}=4.44KHz$
The new voltage output, on condition that the operation is at constant frequency after the halving the pulse width.
펄스 폭을 반으로 줄이면-
$$T_{ON}=\frac{150\times 10^{-6}}{2}=75\mu sec$$따라서 주파수는 일정합니다.
$$f=4.44KHz$$ $$T=\frac{1}{f}=150\mu sec$$전압 출력은-
$$V_{0}=V_{S}\left ( \frac{T}{T-T_{ON}} \right )=150\times \left ( \frac{150\times 10^{-6}}{\left ( 150-75 \right )\times 10^{-6}} \right )=300Volts$$인버터는 필요한 주파수 및 전압 출력에서 DC 형태의 전력을 AC 형태로 변환하는 전력 전자 장치를 말합니다.
인버터는 두 가지 주요 범주로 분류됩니다.
Voltage Source Inverter (VSI) − 전압 소스 인버터에는 DC 전압이 제한되거나 인버터 입력 단자에서 임피던스가 0 인 뻣뻣한 DC 소스 전압이 있습니다.
Current Source Inverter (CSI)− 전류 소스 인버터는 임피던스가 높은 DC 소스에서 가변 전류를 공급받습니다. 결과적인 전류 파동은 부하의 영향을받지 않습니다.
단상 인버터
단상 인버터에는 풀 브리지 인버터와 하프 브리지 인버터의 두 가지 유형이 있습니다.
하프 브리지 인버터
이 유형의 인버터는 풀 브리지 인버터의 기본 구성 요소입니다. 두 개의 스위치가 포함되어 있으며 각 커패시터에는 다음과 같은 전압 출력이 있습니다.$\frac{V_{dc}}{2}$. 또한 스위치는 서로를 보완합니다. 즉, 하나가 켜지면 다른 하나가 꺼집니다.
풀 브리지 인버터
이 인버터 회로는 DC를 AC로 변환합니다. 스위치를 올바른 순서로 닫고 열면이를 달성합니다. 스위치가 닫힌 상태에 따라 네 가지 작동 상태가 있습니다.
삼상 인버터
3 상 인버터는 DC 입력을 3 상 AC 출력으로 변환합니다. 3 개의 암은 일반적으로 3 상 AC 전원을 생성하기 위해 120 ° 각도로 지연됩니다. 인버터 스위치는 각각 50 %의 비율을 가지며 시간 T (60 ° 각도 간격)의 T / 6마다 전환이 발생합니다. 스위치 S1 및 S4, 스위치 S2 및 S5 및 스위치 S3 및 S6은 서로를 보완합니다.
아래 그림은 3 상 인버터 회로를 보여줍니다. 동일한 DC 소스에 배치 된 3 개의 단상 인버터 일뿐입니다. 3 상 인버터의 극 전압은 단상 하프 브리지 인버터의 극 전압과 같습니다.

위의 두 가지 유형의 인버터에는 두 가지 전도 모드가 있습니다. 180° mode of conduction 과 120° mode of conduction.
180 ° 전도 모드
이 전도 모드에서 모든 장치는 180 ° 동안 전도 상태에 있으며 60 ° 간격으로 켜집니다. 단자 A, B 및 C는 부하의 3 상 델타 또는 스타 연결에 연결된 브리지의 출력 단자입니다.
균형 잡힌 스타 연결 부하의 작동은 아래 다이어그램에 설명되어 있습니다. 0 ° ~ 60 ° 기간 동안 점 S1, S5 및 S6은 전도 모드에 있습니다. 부하의 단자 A와 C는 양의 지점에서 소스에 연결됩니다. 단자 B는 음의 지점에서 소스에 연결됩니다. 또한 저항 R / 2는 중립과 양극 사이에 있고 저항 R은 중립과 음극 단자 사이에 있습니다.
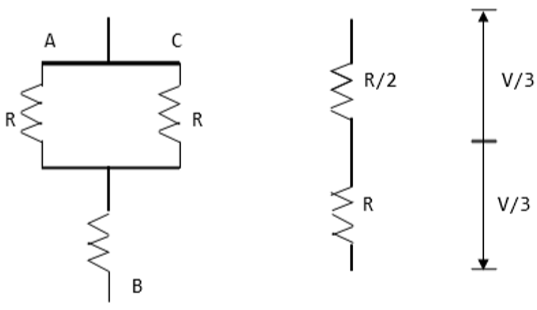
| 부하 전압은 다음과 같습니다. V AN = V / 3, V BN = −2V / 3, V CN = V / 3 |
라인 전압은 다음과 같이 제공됩니다. V AB = V AN − V BN = V, V BC = V BN -V CN = -V, V CA = V CN − V AN = 0 |
180 ° 전도 모드에 대한 파형
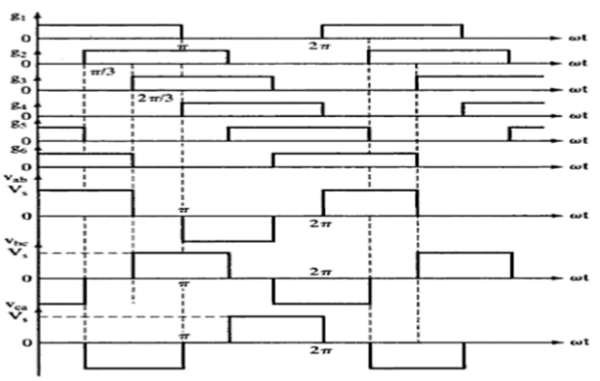
120 ° 전도 모드
이 전도 모드에서 각 전자 장치는 120 ° 동안 전도 상태에 있습니다. 모든 위상에 걸쳐 6 단계 유형의 파형이 생성되므로 부하의 델타 연결에 가장 적합합니다. 따라서 각 장치가 120 °에서만 전도하기 때문에 어느 순간에 두 개의 장치 만 전도됩니다.
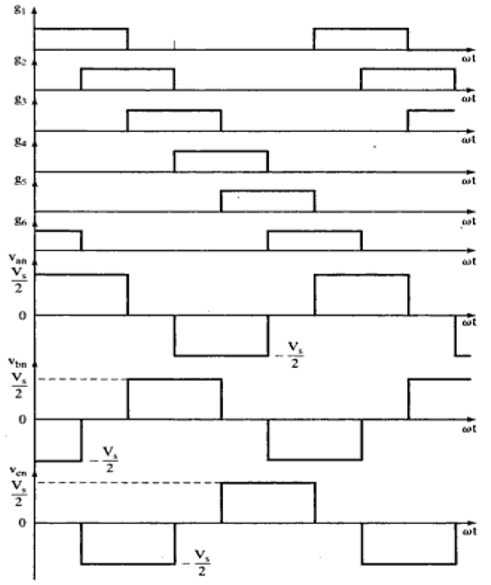
부하의 단자 A는 양극단에 연결되고 단자 B는 소스의 음 극단에 연결됩니다. 부하의 단자 C는 부동 상태라고하는 상태입니다. 또한 위상 전압은 아래와 같이 부하 전압과 동일합니다.
위상 전압 = 라인 전압
V AB = V
V BC = −V / 2
V CA = −V / 2
120 ° 전도 모드에 대한 파형
PWM은 부하 전류에서 전체 고조파 왜곡 (THD)을 줄이는 데 사용되는 기술입니다. 펄스 폭이 변조 된 후 가변 평균 파형 값 f (t)를 생성하는 직사각형 / 정사각형 형태의 맥파를 사용합니다. 변조 시간은 T로 제공됩니다. 따라서 파형 평균 값은
$$\bar{y}=\frac{1}{T}\int_{0}^{T}f\left ( t \right )dt$$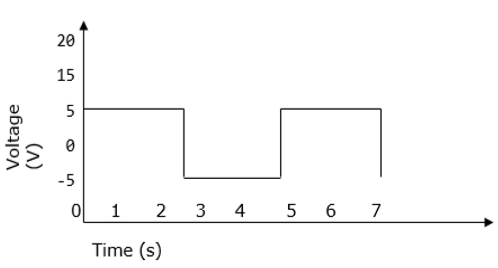
사인파 펄스 폭 변조
간단한 소스 전압 인버터에서는 필요에 따라 스위치를 켜고 끌 수 있습니다. 각주기 동안 스위치는 한 번 켜지거나 꺼집니다. 그 결과 사각 파형이 생성됩니다. 그러나 스위치를 여러 번 켜면 파형이 개선 된 고조파 프로파일을 얻을 수 있습니다.
정현파 PWM 파형은 원하는 변조 파형을 고주파 삼각 파형과 비교하여 얻습니다. 신호의 전압이 반송파의 전압보다 작거나 크든 관계없이 DC 버스의 결과 출력 전압은 음 또는 양입니다.
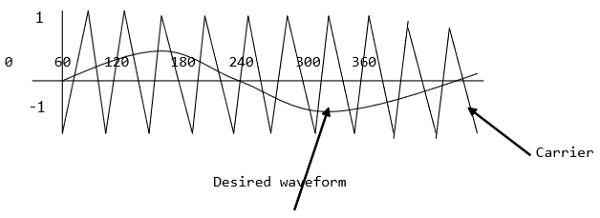
정현파 진폭은 A m 으로 주어지고 캐리어 삼각형의 진폭은 A c 로 주어집니다 . 정현파 PWM의 경우 변조 지수 m은 A m / A c로 제공 됩니다.
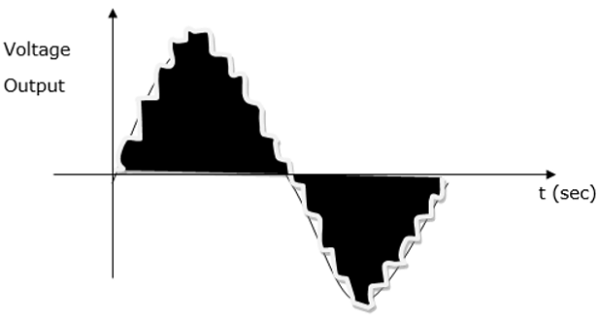
수정 된 정현파 파형 PWM
수정 된 정현파 PWM 파형은 전력 제어 및 역률 최적화에 사용됩니다. 주된 개념은 PWM 컨버터를 수정하여 그리드에서 지연된 전류를 전압 그리드로 전환하는 것입니다. 결과적으로 전력 효율이 향상되고 역률이 최적화됩니다.
다중 PWM
다중 PWM에는 값이 동일하지 않은 수많은 출력이 있지만 생성되는 기간은 모든 출력에 대해 일정합니다. PWM이있는 인버터는 고전압 출력에서 작동 할 수 있습니다.

아래 파형은 다중 PWM에 의해 생성 된 정현파입니다.
전압 및 고조파 제어
주파수가 60Hz 인 기본 전력의 배수 적분 인 주파수를 갖는 주기적 파형을 고조파라고합니다. 반면에 총 고조파 왜곡 (THD)은 모든 고조파 전류 주파수의 총 기여도를 나타냅니다.
고조파는 주어진 회로에서 사용되는 정류기의 수를 나타내는 펄스를 특징으로합니다. 다음과 같이 계산됩니다-
$$h=\left ( n\times P \right )+1 \quad or \quad -1$$어디 n − 정수 1, 2, 3, 4… .n
P − 정류기 수
아래 표에 요약되어 있습니다.
Harmonic |
Frequency |
| 1 위 | 60Hz |
| 2 차 | 120Hz |
| 3 번째 | 180Hz |
| 4 일 | 240Hz |
| 5 위 . . 49 위 |
300Hz . . 2940Hz |
고조파는 전압 및 전류 출력에 영향을 미치며 절연 변압기, 라인 리액터, 전력 시스템 재 설계 및 고조파 필터를 사용하여 줄일 수 있습니다.
직렬 공진 인버터
공진 인버터는 공진 전류의 진동을 기반으로 작동하는 전기 인버터입니다. 여기서 스위칭 장치와 공진 부품은 서로 직렬로 연결됩니다. 회로의 자연스러운 특성으로 인해 스위칭 장치를 통과하는 전류는 0으로 떨어집니다.
이 유형의 인버터는 20kHz-100kHz 범위의 매우 높은 주파수에서 정현파 파형을 생성합니다. 따라서 유도 가열 및 형광등과 같은 고정 출력이 필요한 응용 분야에 가장 적합합니다. 스위칭 주파수가 높기 때문에 일반적으로 크기가 작습니다.
공진 인버터는 다양한 구성을 가지고 있으므로 두 그룹으로 분류됩니다.
- 단방향 스위치가있는 경우
- 양방향 스위치가있는 것
단상 하프 브리지 인버터의 저항은 2.5Ω이고 입력 DC 전압은 50V입니다. 다음을 계산하십시오-
Solution −
a. The RMS voltage occurring at the fundamental frequency
$E_{1RMS}=0.9\times 50V=45V$
b. The power Output
RMS 출력 전압 $E_{ORMS}=E=50V$
출력 파워 $=E^{2}/R=\left ( 50\right )^{2}/2.5=1000W$
c. Peak current and average current
피크 전류 $I_{p}=E_{0}/R=50/2.5=20A$
평균 전류$=I_{p}/2=20/2=10A$
d. Harmonic RMS voltage
$E_{n}=\left \{ \left ( E_{ORMS} \right )^{2}-\left ( E_{1RMS} \right )^{2} \right \}^{0.5}=\left [ 50^{2} -45^{2}\right ]^{0.5}=21.8V$
e. Total harmonic distortion
$E_{n}/E_{1RMS}=21.8/45=0.48\times 100\%=48\%$
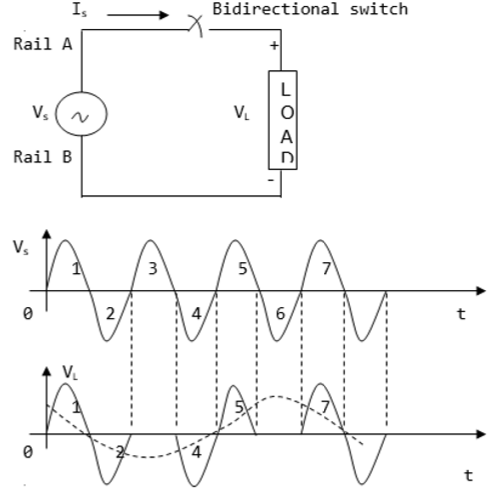
단상 AC 컨트롤러 (전압 컨트롤러)는 부하 회로에 적용된 교류 전압 값을 변경하는 데 사용됩니다. 사이리스터는 또한 부하와 AC 전압의 일정한 소스 사이에 배치됩니다.
평균 제곱근 교류 전압은 사이리스터 트리거링 각도를 변경하여 조절됩니다. 위상 제어의 경우 사이리스터는 각 입력주기 동안 AC 입력 공급 장치에서 부하 회로로 연결을 설정하는 스위치로 사용됩니다. 모든 양의 입력 전압에 대해 초핑이 발생하고 전압이 감소합니다.
저항성 부하가있는 회로 다이어그램
사이클의 절반 동안 사이리스터 스위치가 켜져 전압 입력이 부하에 나타날 수 있습니다. 그 다음에는 소스 전압에서 부하를 분리하기 위해 마지막 반주기 동안 OFF 상태가 이어집니다.
트리거 각도 α가 제어되면 부하 전압의 RMS 값도 제어됩니다. 따라서 트리거 각도 α는 다음 값으로 정의됩니다.ωt 사이리스터가 켜집니다.
AC 컨버터의 다단계 시퀀스 제어
두 개 이상의 시퀀스 제어 단계를 연결하면 역률이 향상되고 THD (총 고조파 왜곡)가 더욱 감소 할 수 있습니다. n- 스테이지 시퀀스 제어 컨버터는 변압기 2 차 부품에 각각 정격 e s / n (소스 전압) 과 함께 n 개의 권선이 있습니다.
두 개의 AC 컨버터가 서로 평행하게 배치되면 제로 시퀀스 방식이 생성됩니다. 두 변환기 사이에 약간의 차이가 있으면 순환 전류에서 큰 제로 시퀀스가 발생합니다. 아래 다이어그램은 컨버터의 병렬 시스템을 보여줍니다. 전류의 방향은 전압 시스템의 방향에 대해 시계 반대 방향입니다.
사이클로 컨버터는 한 주파수에서 다른 주파수의 AC 전력으로 AC 전력을 변경할 수있는 주파수 변환기를 말합니다. 이 프로세스를 AC-AC 변환이라고합니다. 주로 전기 견인, 가변 속도 및 유도 가열을 갖는 AC 모터에 사용됩니다.
사이클로 컨버터는 한 단계에서 주파수 변환을 수행 할 수 있으며 전압과 주파수를 제어 할 수 있습니다. 또한 자연 정류를 활용하기 때문에 정류 회로를 사용할 필요가 없습니다. 사이클로 컨버터 내의 전력 전달은 양방향 (양방향)으로 발생합니다.
사이클로 컨버터의 주요 문제점은 작은 전류에서 작동 할 때 발사 지연으로 인해 비 효율성이 발생한다는 것입니다. 또한 작업은 절반 주파수 입력 값과 동일하지 않은 주파수에서만 원활합니다. 이는 사이클로 컨버터가 위상 제어되는 AC-AC 컨버터이기 때문에 사실입니다. 따라서 필요한 AC 출력 전압을 제공하려면 라인 (자연) 정류를 적용하여 전압 입력 세그먼트를 선택해야합니다. 이것은 출력 주파수가 주파수 입력보다 낮은 이유를 설명합니다.
사이클로 컨버터의 고조파는 주로 제어 방법, 중첩 효과, 주어진 사이클의 펄스 수, 작동 모드 및 전도 모드의 영향을받습니다.
사이클로 컨버터에는 두 가지 유형이 있습니다.
Step Up cycloconverter − 이러한 유형은 자연 정류를 사용하며 입력보다 높은 주파수에서 출력을 제공합니다.
Step Down cycloconverter −이 유형은 강제 정류를 사용하며 입력보다 주파수가 낮은 출력을 생성합니다.
사이클로 컨버터는 세 가지 범주로 더 분류됩니다.
Single phase to single-phase−이 유형의 사이클로 컨버터에는 두 개의 전파 변환기가 연속적으로 연결되어 있습니다. 한 컨버터가 작동 중이면 다른 컨버터가 비활성화되고 전류가 통과하지 않습니다.
Three-phase to single-phase −이 사이클로 컨버터는 정류 모드 인 (+ V, + I) 및 (−V, −I) 및 반전 모드 인 (+ V, −I) 및 (−V, + I)의 4 개 사분면에서 작동합니다.
Three-phase to three-phase −이 유형의 사이클로 컨버터는 주로 3 상 유도 및 동기식 기계에서 작동하는 AC 기계 시스템에 사용됩니다.
통합 사이클 컨트롤러는 손실없이 직접 스위칭을 수행 할 수있는 컨버터입니다. 이 프로세스는 AC에서 DC로, DC에서 AC 로의 중간 프로세스를 수행하지 않고도 AC에서 AC로 직접 변환합니다.
기본 적분 제어 사이클은 본질적으로 정현파입니다. AC 입력에서 고주파수 반주기를 결합하고 제거하여 작동합니다. 컨트롤러는 일반적으로 전체 또는 절반 주기만 사용되기 때문에 전압 입력이 0 인 절반주기 동안 OFF로 켜집니다. 따라서 적분 사이클 회로는 공진 회로 없이도 제로 전압에서 스위칭을 달성합니다.
아래 다이어그램은 간단한 통합 사이클 컨트롤러를 보여줍니다. 직접 변환을 수행하는 부하 및 전원 스위치가 포함되어 있습니다. 이 다이어그램은 3 배에서 1 배로 소스 주파수의 변환을 보여줍니다.
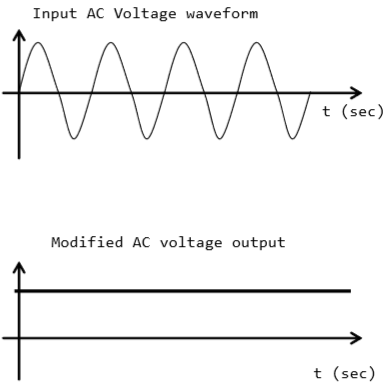
역률 제어
역률 보정이라고도하는 역률 제어는 무효 전력의 양을 줄이는 프로세스입니다. 이 경우에 사용되는 전력 전자 장치를 PFC (역률 컨트롤러)라고합니다. 전력 삼각형 (무효 전력, 실제 전력 및 피상 전력으로 구성됨)에서 무효 전력은 실제 전력에 대해 직각 (90 °)이며 자기장에 에너지를 공급하는 데 사용됩니다. 무효 전력은 전자 장비에서 실제 가치가 없지만 전기 요금은 실제 및 무효 전력 비용으로 구성됩니다. 따라서 전자 장치에 역률 컨트롤러가 있어야합니다.
역률 (k)은 무효 전력 (kVAr)에 대한 실제 전력 (kW)의 비율로 정의됩니다. 값의 범위는 0 ~ 1입니다. 역률이 0.8 이상인 장치는 전력을 효율적으로 사용하고 있다고합니다. PFC를 통합하면 0.95 ~ 0.99의 역률 범위가 보장됩니다. 역률 컨트롤러는 주로 산업용 장비에 사용되어 형광등 및 전기 모터에서 생성되는 무효 전력을 최소화합니다.
고조파 왜곡을 일으키지 않고 역률을 개선하려면 기존 커패시터를 사용하지 않아야합니다. 대신 고조파 억제를위한 필터 (커패시터 및 리액터 조합)가 사용됩니다. 아래 그림은 고조파 필터를 보여줍니다.
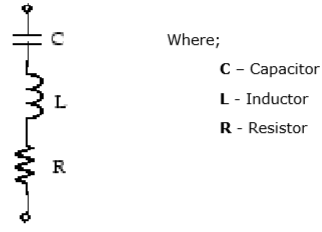
위 유형의 고조파 필터를 단일 튜닝 필터라고합니다. 이 필터의 품질 계수 Q는 Q (동조 주파수)에서 리액턴스 (X L ) 의 품질 계수로 정의되며 , 여기서 Q는 (nX L / R)로 지정됩니다.
매트릭스 변환기는 단일 변환 단계가있는 변환기로 정의됩니다. 양방향 제어 스위치를 사용하여 AC에서 AC로 전력을 자동 변환합니다. PWM 전압 정류기 (양면)에 대한 대안을 제공합니다.
매트릭스 컨버터는 입력 및 출력 스위칭 주파수를 표시하는 정현파가 특징입니다. 양방향 스위치를 사용하면 제어 가능한 역률 입력이 가능합니다. 또한 DC 링크가 없기 때문에 컴팩트 한 디자인이 보장됩니다. 매트릭스 컨버터의 단점은 완전히 제어되고 고주파에서 작동 할 수있는 양방향 스위치가 없다는 것입니다. 입력 전압에 출력되는 전압 비율이 제한됩니다.
매트릭스 컨버터 제어에는 세 가지 방법이 있습니다.
- 공간 벡터 변조
- 펄스 폭 변조
- 벤 투리-기능 전달 분석
매트릭스 컨버터 회로
아래의 다이어그램은 단상 매트릭스 컨버터를 보여줍니다.

여기에는 4 개의 양방향 스위치가 포함되어 있으며 각 스위치는 순방향 차단 및 역방향 전압 모두에서 전도 할 수 있습니다.
공간 벡터 변조 (SVM)
SVM은 PWM을 제어하는 데 사용되는 알고리즘 방법입니다. 다양한 속도로 AC 모터를 구동하는 AC 파형을 생성합니다. DC 공급 전원이있는 3 상 인버터의 경우 출력의 3 개 주요 다리가 3 상 모터에 연결됩니다.
스위치는 동일한 레그에있는 두 개의 스위치가 동시에 켜지지 않도록 제어합니다. 동시 ON 상태로 인해 DC 공급 단락이 발생할 수 있습니다. 이는 2 개가 0이고 6 개가 스위칭을위한 활성 벡터 인 8 개의 스위칭 벡터로 이어집니다.
단상 AC 전압 변환기에는 다음과 같은 세부 정보가 있습니다.
ON 시간 = 6 분, OFF 시간 = 4 분, 주파수 = 50Hz,
전압 소스 V o = 110V
다음을 계산하십시오.
트리거 각도 α
Solution −
$T=2\times \left ( T_{ON}+T_{OFF} \right )$ 그러나 $f=50Hz,$ $T=2\times \left ( 6+4 \right )=20mins$
$360^{\circ}=20min,$ $1min=18^{\circ}$
따라서, $T_{OFF}=4min$
그때,
$$\alpha =\frac{4}{0.1}\times 1.8=72^{\circ}$$전압 출력
Solution −
$$V_{0}=\left ( V_{S}\times D \right ),\quad where \quad D=\frac{T_{ON}}{T_{ON}+T_{OFF}}=\frac{6}{10}=0.6$$ $$T_{ON}=6min,\quad T_{OFF}=4 min,\quad V_{S}=110V$$ $$V_{0}\left ( Voltage Output \right )=V_{S}\times D=110\times 0.6=66Volts$$