Радиолокационные системы - устройства подавления линии задержки
В этой главе мы узнаем о компенсаторах линии задержки в радиолокационных системах. Как следует из названия, линия задержки вводит определенную задержку. Таким образом, линия задержки в основном используется в компенсаторе линии задержки, чтобы ввестиdelay времени следования импульсов.
Delay line cancellerпредставляет собой фильтр, который удаляет составляющие постоянного тока эхо-сигналов, полученных от неподвижных целей. Это означает, что он позволяет компонентам переменного тока эхо-сигналов, полученных от нестационарных целей, то есть движущихся целей.
Типы компенсаторов линии задержки
Компенсаторы линии задержки можно разделить на следующие two types исходя из количества присутствующих в нем линий задержки.
- Прерыватель одиночной линии задержки
- Устройство отмены двойной задержки линии
В наших последующих разделах мы обсудим больше об этих двух компенсаторах линии задержки.
Прерыватель одиночной линии задержки
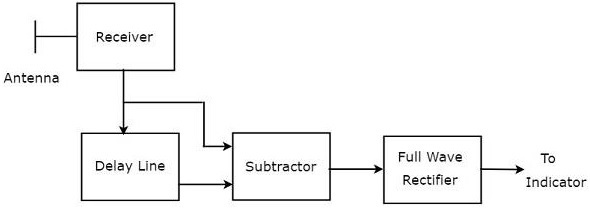
Комбинация линии задержки и вычитателя известна как компенсатор линии задержки. Он также называется компенсатором одиночной линии задержки. Вblock diagram приемника MTI с одиночным компенсатором линии задержки показан на рисунке ниже.
Мы можем написать mathematical equation принятого эхо-сигнала после эффекта Доплера как -
$$ V_1 = A \ sin \ left [2 \ pi f_dt- \ phi_0 \ right] \: \: \: \: \: Equation \: 1 $$
Где,
A - амплитуда видеосигнала
$ f_d $ - частота Доплера
$ \ phi_o $ - фазовый сдвиг и равен $ 4 \ pi f_tR_o / C $
Мы получим output of Delay line canceller, заменив $ t $ на $ t-T_P $ в уравнении 1.
$$ V_2 = A \ sin \ left [2 \ pi f_d \ left (t-T_P \ right) - \ phi_0 \ right] \: \: \: \: \: Уравнение \: 2 $$
Где,
$ T_P $ - время повторения импульсов
Мы получим subtractor output путем вычитания уравнения 2 из уравнения 1.
$$ V_1-V_2 = A \ sin \ left [2 \ pi f_dt- \ phi_0 \ right] -A \ sin \ left [2 \ pi f_d \ left (t-T_P \ right) - \ phi_0 \ right] $$
$$ \ Rightarrow V_1-V_2 = 2A \ sin \ left [\ frac {2 \ pi f_dt- \ phi_0- \ left [2 \ pi f_d \ left (t-T_P \ right) - \ phi_0 \ right]} {2 } \ right] \ cos \ left [\ frac {2 \ pi f_dt- \ phi_o + 2 \ pi f_d \ left (t-T_P \ right) - \ phi_0} {2} \ right] $$
$$ V_1-V_2 = 2A \ sin \ left [\ frac {2 \ pi f_dT_P} {2} \ right] \ cos \ left [\ frac {2 \ pi f_d \ left (2t-T_P \ right) -2 \ phi_0} {2} \ right] $$
$$ \ Rightarrow V_1-V_2 = 2A \ sin \ left [\ pi f_dT_p \ right] \ cos \ left [2 \ pi f_d \ left (t- \ frac {T_P} {2} \ right) - \ phi_0 \ right ] \: \: \: \: \: Уравнение \: 3 $$
Выходной сигнал вычитателя используется как вход для полноволнового выпрямителя. Следовательно, выходной сигнал полноволнового выпрямителя выглядит так, как показано на следующем рисунке. Это не что иное, какfrequency response компенсатора одиночной линии задержки.

Из уравнения 3 можно заметить, что частотная характеристика компенсатора одиночной линии задержки становится равной нулю, когда $ \ pi f_dT_P $ равно integer multiples of $ \ pi $ Это означает, что $ \ pi f_dT_P $ равно $ n \ pi $ Математически это можно записать как
$$ \ pi f_dT_P = n \ pi $$
$$ \ Rightarrow f_dT_P = n $$
$$ \ Rightarrow f_d = \ frac {n} {T_P} \: \: \: \: \: Equation \: 4 $$
Из уравнения 4 можно сделать вывод, что частотная характеристика компенсатора одиночной линии задержки становится равной нулю, когда доплеровская частота $ f_d $ равна целому кратному обратному времени повторения импульсов $ T_P $.
Нам известна следующая зависимость между временем следования импульсов и их частотой.
$$ f_d = \ frac {1} {T_P} $$
$$ \ Rightarrow \ frac {1} {T_P} = f_P \: \: \: \: \: Equation \: 5 $$
Мы получим следующее уравнение, подставив уравнение 5 в уравнение 4.
$$ \ Rightarrow f_d = nf_P \: \: \: \: \: Equation \: 6 $$
Из уравнения 6 можно сделать вывод, что частотная характеристика компенсатора одиночной линии задержки становится равной нулю, когда доплеровская частота, $ f_d $ равна целому числу кратных частоте повторения импульсов $ f_P $.
Слепые скорости
Из того, что мы узнали до сих пор, одиночный компенсатор линии задержки устраняет составляющие постоянного тока эхо-сигналов, полученных от неподвижных целей, когда $ n $ равно нулю. В дополнение к этому, он также устраняет компоненты переменного тока эхо-сигналов, полученных от нестационарных целей, когда доплеровская частота $ f_d $ равна целому числу.(other than zero) кратные частоте следования импульсов $ f_P $.
Итак, относительные скорости, для которых частотная характеристика компенсатора одиночной линии задержки становится равной нулю, называются blind speeds. Математически мы можем записать выражение для слепой скорости $ v_n $ как -
$$ v_n = \ frac {n \ lambda} {2T_P} \: \: \: \: \: Equation \: 7 $$
$$ \ Rightarrow v_n = \ frac {n \ lambda f_P} {2} \: \: \: \: \: Equation \: 8 $$
Где,
$ n $ - целое число, равное 1, 2, 3 и т. д.
$ \ lambda $ - рабочая длина волны
Пример проблемы
Радар MTI работает на частоте $ 6GHZ $ с частотой повторения импульсов $ 1KHZ $. Найдите первое, второе и третьеblind speeds этого радара.
Решение
Дано,
Рабочая частота радара MTI, $ f = 6GHZ $
Частота следования импульсов, $ f_P = 1KHZ $.
Ниже приводится формула для operating wavelength $ \ lambda $ по рабочей частоте, ф.
$$ \ lambda = \ frac {C} {f} $$
Заменить, $ C = 3 \ times10 ^ 8m / sec $ и $ f = 6GHZ $ в приведенном выше уравнении.
$$ \ lambda = \ frac {3 \ times10 ^ 8} {6 \ times10 ^ 9} $$
$$ \ Rightarrow \ lambda = 0,05 м $$
Так что operating wavelength $ \ lambda $ равняется 0,05 млн $, когда рабочая частота f составляет $ 6GHZ $.
Мы знаем следующее formula for blind speed.
$$ v_n = \ frac {n \ lambda f_p} {2} $$
Подставив $ n $ = 1,2 & 3 в приведенное выше уравнение, мы получим следующие уравнения для первой, второй и третьей скоростей слепых соответственно.
$$ v_1 = \ frac {1 \ times \ lambda f_p} {2} = \ frac {\ lambda f_p} {2} $$
$$ v_2 = \ frac {2 \ times \ lambda f_p} {2} = 2 \ left (\ frac {\ lambda f_p} {2} \ right) = 2v_1 $$
$$ v_3 = \ frac {3 \ times \ lambda f_p} {2} = 3 \ left (\ frac {\ lambda f_p} {2} \ right) = 3v_1 $$
Substitute значения $ \ lambda $ и $ f_P $ в уравнении первой слепой скорости.
$$ v_1 = \ frac {0,05 \ times 10 ^ 3} {2} $$
$$ \ Rightarrow v_1 = 25 м / сек $$
Следовательно first blind speed $ v_1 $ равняется 25 миллионам долларов в секунду для данных спецификаций.
Мы получим значения second & third blind speeds как 50 миллионов долларов в секунду и 75 миллионов долларов в секунду соответственно путем подстановки значения 1 в уравнения для второй и третьей слепых скоростей.
Устройство отмены двойной задержки линии
Мы знаем, что один компенсатор линии задержки состоит из линии задержки и вычитателя. Если два таких компенсатора линии задержки соединены каскадом вместе, то эта комбинация называется двойным компенсатором линии задержки. Вblock diagram Двойной компенсатор линии задержки показан на следующем рисунке.

Пусть $ p \ left (t \ right) $ и $ q \ left (t \ right) $ будут входом и выходом первого компенсатора линии задержки. Мы получим следующее математическое соотношение изfirst delay line canceller.
$$ q \ left (t \ right) = p \ left (t \ right) -p \ left (t-T_P \ right) \: \: \: \: \: Уравнение \: 9 $$
Выходной сигнал первого компенсатора линии задержки применяется как входной сигнал второго компенсатора линии задержки. Следовательно, $ q \ left (t \ right) $ будет входом второго компенсатора линии задержки. Пусть $ r \ left (t \ right) $ будет выходом второго компенсатора линии задержки. Мы получим следующее математическое соотношение изsecond delay line canceller.
$$ r \ left (t \ right) = q \ left (t \ right) -q \ left (t-T_P \ right) \: \: \: \: \: Уравнение \: 10 $$
Замените $ t $ на $ t-T_P $ в уравнении 9.
$$ q \ left (t-T_P \ right) = p \ left (t-T_P \ right) -p \ left (t-T_P-T_P \ right) $$
$$ q \ left (t-T_P \ right) = p \ left (t-T_P \ right) -p \ left (t-2T_P \ right) \: \: \: \: \: Уравнение \: 11 $$
Substitute, Уравнение 9 и уравнение 11 в уравнении 10.
$$ r \ left (t \ right) = p \ left (t \ right) -p \ left (t-T_P \ right) - \ left [p \ left (t-T_P \ right) -p \ left (t -2T_P \ right) \ right] $$
$$ \ Rightarrow r \ left (t \ right) = p \ left (t \ right) -2p \ left (t-T_P \ right) + p \ left (t-2T_P \ right) \: \: \: \ : \: Уравнение \: 12 $$
В advantageОдной из особенностей двойного компенсатора линии задержки является то, что он полностью отклоняет помехи. Выходной сигнал двух компенсаторов линии задержки, которые соединены каскадом, будет равен квадрату выхода подавителя одиночной линии задержки.
Таким образом, величина выходного сигнала компенсатора двойной линии задержки, который присутствует на приемнике РЛС MTI, будет равна $ 4A ^ 2 \ left (\ sin \ left [\ pi f_dT_P \ right] \ right) ^ 2 $.

Частотные характеристики компенсатора двойной линии задержки и каскадной комбинации двух компенсаторов линии задержки одинаковы. Вadvantage Компенсатора линии задержки во временной области заключается в том, что он может работать во всех частотных диапазонах.