อิเล็กทรอนิกส์กำลัง - การควบคุมวงจรรวม
ตัวควบคุมวงจรอินทิกรัลเป็นตัวแปลงที่มีความสามารถในการสลับโดยตรงโดยไม่สูญเสีย กระบวนการนี้จะแปลง AC เป็น AC โดยตรงโดยไม่ต้องดำเนินการขั้นตอนกลางของ AC เป็น DC จากนั้น DC เป็น AC
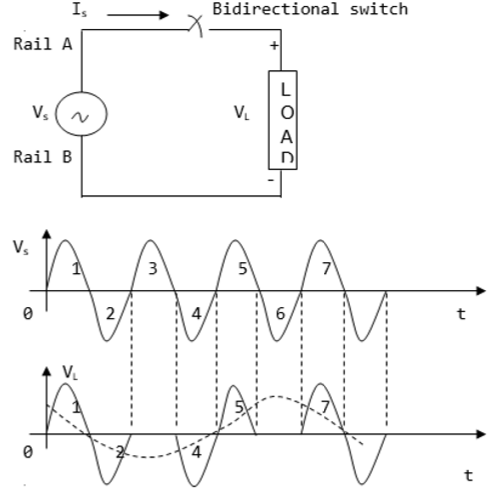
วงจรการควบคุมอินทิกรัลพื้นฐานคือไซน์ในธรรมชาติ ทำงานโดยการรวมและกำจัดครึ่งรอบความถี่ที่สูงขึ้นจากอินพุต AC โดยปกติคอนโทรลเลอร์จะเปิดปิดในช่วงครึ่งรอบโดยที่แรงดันไฟฟ้าเข้าอยู่ที่ศูนย์เนื่องจากใช้เฉพาะรอบเต็มหรือครึ่งรอบเท่านั้น ดังนั้นวงจรอินทิกรัลจึงเกิดการสลับที่แรงดันไฟฟ้าเป็นศูนย์โดยไม่ต้องใช้วงจรเรโซแนนซ์
แผนภาพด้านล่างแสดงตัวควบคุมอินทิกรัลแบบง่าย ประกอบด้วยโหลดและสวิตช์ไฟซึ่งทำการแปลงโดยตรง แผนภาพนี้แสดงการแปลงความถี่ของแหล่งที่มาจากปัจจัยสามเป็นหนึ่ง
การควบคุมตัวประกอบกำลัง
การควบคุมตัวประกอบกำลังหรือที่เรียกว่าการแก้ไขตัวประกอบกำลังเป็นกระบวนการลดปริมาณพลังงานปฏิกิริยา อุปกรณ์อิเล็กทรอนิกส์กำลังที่ใช้ในกรณีนี้เรียกว่าตัวควบคุมตัวประกอบกำลัง (PFC) จากสามเหลี่ยมกำลัง (ซึ่งประกอบด้วยปฏิกิริยากำลังจริงและกำลังปรากฏ) กำลังปฏิกิริยาจะอยู่ที่มุมฉาก (90 °) ถึงกำลังจริงและใช้เพื่อให้พลังงานแก่สนามแม่เหล็ก แม้ว่าพลังงานปฏิกิริยาจะไม่มีมูลค่าที่แท้จริงในอุปกรณ์อิเล็กทรอนิกส์ แต่การเรียกเก็บเงินค่าไฟฟ้าประกอบด้วยต้นทุนพลังงานจริงและค่าไฟฟ้าที่เกิดปฏิกิริยา สิ่งนี้ทำให้จำเป็นต้องมีตัวควบคุมเพาเวอร์แฟคเตอร์ในอุปกรณ์อิเล็กทรอนิกส์
ตัวประกอบกำลัง (k) หมายถึงอัตราส่วนของกำลังไฟฟ้าจริง (ในหน่วยกิโลวัตต์) ต่อกำลังปฏิกิริยา (เป็น kVAr) ค่าของมันอยู่ในช่วง 0 ถึง 1 หากอุปกรณ์มีเพาเวอร์แฟคเตอร์ 0.8 ขึ้นไปแสดงว่ากำลังใช้พลังงานอย่างมีประสิทธิภาพ การรวม PFC ช่วยให้มั่นใจได้ว่าตัวประกอบกำลังอยู่ในช่วง 0.95 ถึง 0.99 ตัวควบคุมตัวประกอบกำลังส่วนใหญ่อยู่ในอุปกรณ์อุตสาหกรรมเพื่อลดพลังงานปฏิกิริยาที่เกิดจากแสงฟลูออเรสเซนต์และมอเตอร์ไฟฟ้า
เพื่อให้แน่ใจว่าตัวประกอบกำลังได้รับการปรับปรุงโดยไม่ก่อให้เกิดความผิดเพี้ยนของฮาร์มอนิกไม่ควรใช้ตัวเก็บประจุแบบเดิม แต่จะใช้ตัวกรอง (การรวมกันของตัวเก็บประจุและเครื่องปฏิกรณ์) สำหรับการปราบปรามฮาร์มอนิกแทน รูปด้านล่างแสดงตัวกรองฮาร์มอนิก
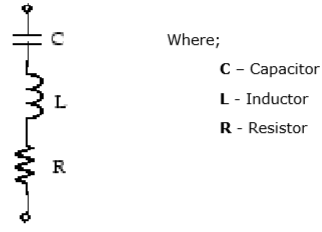
ตัวกรองฮาร์มอนิกประเภทข้างต้นเรียกว่าฟิลเตอร์แบบปรับจูนเดียว ปัจจัยคุณภาพ Q ของตัวกรองนี้ถูกกำหนดให้เป็นปัจจัยคุณภาพของรีแอคแตนซ์ (X L ) ที่ Q (ความถี่การปรับแต่ง) โดยที่ Q กำหนดโดย (nX L / R)