หลักการสื่อสาร - คู่มือฉบับย่อ
การสื่อสารด้วยคำนี้เกิดจากคำภาษาละติน "comm “nicāre" ซึ่งแปลว่า "แบ่งปัน" การสื่อสารเป็นขั้นตอนพื้นฐานสำหรับการแลกเปลี่ยนข้อมูล
ตัวอย่างเช่นทารกในเปลสื่อสารด้วยเสียงร้องว่าเธอต้องการแม่ เสียงวัวส่งเสียงดังเมื่อตกอยู่ในอันตราย บุคคลสื่อสารด้วยความช่วยเหลือของภาษา การสื่อสารเป็นสะพานในการแบ่งปัน
Communication สามารถกำหนดเป็นกระบวนการแลกเปลี่ยนข้อมูลโดยใช้วิธีการเช่นคำพูดการกระทำสัญญาณ ฯลฯ ระหว่างบุคคลตั้งแต่สองคนขึ้นไป
ต้องการการสื่อสาร
สำหรับสิ่งมีชีวิตใด ๆ ในขณะที่มีอยู่ร่วมกันมีความจำเป็นในการแลกเปลี่ยนข้อมูลบางอย่าง เมื่อใดก็ตามที่มีความต้องการแลกเปลี่ยนข้อมูลควรมีวิธีการสื่อสารบางอย่าง ในขณะที่วิธีการสื่อสารอาจเป็นอะไรก็ได้เช่นท่าทางสัญญาณสัญลักษณ์หรือภาษาความจำเป็นในการสื่อสารเป็นสิ่งที่หลีกเลี่ยงไม่ได้
ภาษาและท่าทางมีบทบาทสำคัญในการสื่อสารของมนุษย์ในขณะที่เสียงและการกระทำมีความสำคัญต่อการสื่อสารของสัตว์ อย่างไรก็ตามเมื่อต้องสื่อข้อความบางอย่างจะต้องมีการสื่อสาร
ส่วนต่างๆของระบบการสื่อสาร
ระบบใด ๆ ที่ให้การสื่อสารประกอบด้วยสามส่วนที่สำคัญและพื้นฐานดังแสดงในรูปต่อไปนี้
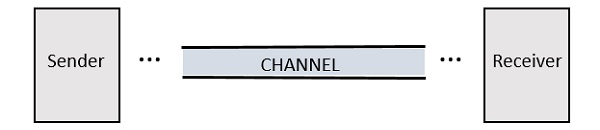
Senderคือคนที่ส่งข้อความ อาจเป็นสถานีส่งสัญญาณจากจุดที่ส่งสัญญาณ
Channel เป็นสื่อกลางในการส่งสัญญาณให้ข้อความเดินทางไปถึงปลายทาง
Receiverคือผู้ที่ได้รับข้อความ อาจเป็นสถานีรับสัญญาณที่รับสัญญาณ
สัญญาณคืออะไร?
การถ่ายทอดข้อมูลด้วยวิธีการบางอย่างเช่นท่าทางเสียงการกระทำ ฯลฯ สามารถเรียกได้ว่าเป็น signaling. ดังนั้นสัญญาณสามารถเป็นsource of energy which transmits some information. สัญญาณนี้ช่วยในการสื่อสารระหว่างผู้ส่งและผู้รับ
แรงกระตุ้นไฟฟ้าหรือคลื่นแม่เหล็กไฟฟ้าซึ่งเดินทางไปได้ไกลเพื่อถ่ายทอดข้อความสามารถเรียกได้ว่าเป็นก signal ในระบบการสื่อสาร
สัญญาณแบ่งออกเป็นสองประเภทหลักคืออนาล็อกและดิจิทัลทั้งนี้ขึ้นอยู่กับลักษณะของสัญญาณ สัญญาณอนาล็อกและดิจิตอลถูกจำแนกเพิ่มเติมดังแสดงในรูปต่อไปนี้

สัญญาณอนาล็อก
สัญญาณแปรผันของเวลาต่อเนื่องซึ่งแสดงถึงปริมาณที่แตกต่างกันของเวลาสามารถเรียกได้ว่าเป็น Analog Signal. สัญญาณนี้เปลี่ยนแปลงไปเรื่อย ๆ ตามเวลาตามค่าของปริมาณที่แสดงถึง
ตัวอย่าง
ให้เราพิจารณาก๊อกที่เติมถังความจุ 100 ลิตรในหนึ่งชั่วโมง (6.00 น. ถึง 7.00 น.) ส่วนของการเติมน้ำมันในถังจะแตกต่างกันไปตามเวลาที่แตกต่างกัน ซึ่งหมายความว่าหลังจาก 15 นาที (06:15 น.) ส่วนหนึ่งในสี่ของถังจะเต็มในขณะที่เวลา 06:45 น. เติมน้ำมัน 3/4 ของรถถัง
หากคุณพยายามวางแผนปริมาณน้ำที่แตกต่างกันในถังตามช่วงเวลาที่แตกต่างกันจะมีลักษณะดังรูปต่อไปนี้

เนื่องจากผลลัพธ์ที่แสดงในภาพนี้แตกต่างกันไป (เพิ่มขึ้น) ตามเวลาสิ่งนี้ time varying quantityสามารถเข้าใจได้ว่าเป็นปริมาณอนาล็อก สัญญาณที่แสดงถึงเงื่อนไขนี้ด้วยเส้นเอียงในรูปคือไฟล์Analog Signal. การสื่อสารตามสัญญาณอนาล็อกและค่าอนาล็อกเรียกว่าเป็นAnalog Communication.
สัญญาณดิจิตอล
สัญญาณที่มีลักษณะไม่ต่อเนื่องหรือไม่ต่อเนื่องในรูปแบบสามารถเรียกได้ว่าเป็น Digital signal. สัญญาณนี้มีค่าแต่ละค่าซึ่งแสดงแยกกันซึ่งไม่ได้ขึ้นอยู่กับค่าก่อนหน้าราวกับว่าสัญญาณเหล่านี้ได้มาในช่วงเวลานั้น ๆ
ตัวอย่าง
ให้เราพิจารณาห้องเรียนที่มีนักเรียน 20 คน หากมีการวางแผนการเข้าร่วมในหนึ่งสัปดาห์ก็จะมีลักษณะดังรูปต่อไปนี้
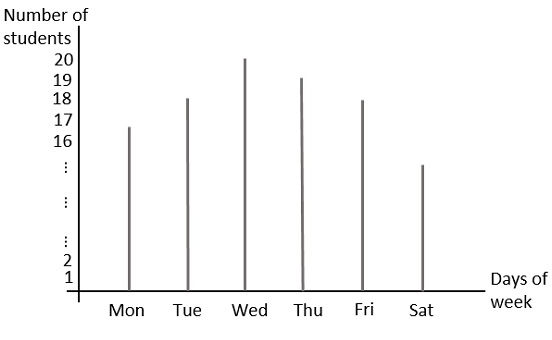
ในรูปนี้ค่าต่างๆจะระบุแยกกัน ตัวอย่างเช่นการเข้าร่วมชั้นเรียนในวันพุธคือ 20 ในขณะที่ในวันเสาร์คือ 15 ค่าเหล่านี้สามารถพิจารณาเป็นรายบุคคลและแยกกันหรือแยกจากกันดังนั้นจึงเรียกว่าdiscrete values.
เลขฐานสองที่มีเพียง 1 และ 0 ส่วนใหญ่เรียกว่า digital values. ดังนั้นสัญญาณที่แทน 1s และ 0s จึงเรียกอีกอย่างว่าdigital signals. การสื่อสารตามสัญญาณดิจิทัลและค่าดิจิทัลเรียกว่าเป็นDigital Communication.
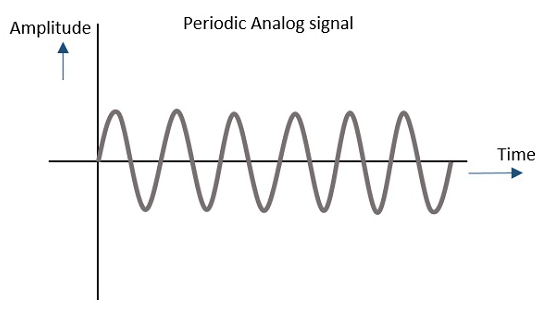
สัญญาณเป็นระยะ
สัญญาณแอนะล็อกหรือดิจิทัลใด ๆ ที่ทำซ้ำรูปแบบในช่วงเวลาหนึ่งเรียกว่าเป็น Periodic Signal. สัญญาณนี้มีรูปแบบต่อเนื่องซ้ำ ๆ กันและง่ายต่อการสันนิษฐานหรือคำนวณ
ตัวอย่าง
หากเราพิจารณาเครื่องจักรในอุตสาหกรรมกระบวนการที่เกิดขึ้นทีละอย่างเป็นขั้นตอนต่อเนื่องและทำซ้ำ ตัวอย่างเช่นการจัดหาและการจัดลำดับวัตถุดิบการแปรรูปวัสดุเป็นแบทช์การบรรจุผลิตภัณฑ์ทีละชิ้น ๆ เป็นต้นทำตามขั้นตอนบางอย่างซ้ำ ๆ
กระบวนการดังกล่าวไม่ว่าจะเป็นอนาล็อกหรือดิจิทัลสามารถแสดงเป็นกราฟิกได้ดังนี้
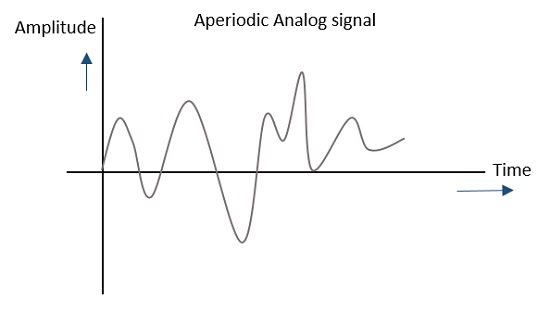
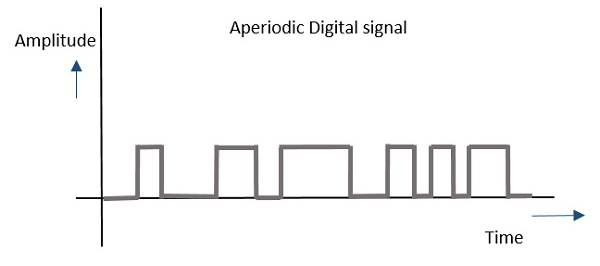
สัญญาณ Aperiodic
สัญญาณอนาล็อกหรือดิจิตอลใด ๆ ที่ไม่ซ้ำรูปแบบในช่วงระยะเวลาหนึ่งเรียกว่าเป็น Aperiodic Signal. สัญญาณนี้มีรูปแบบต่อเนื่อง แต่รูปแบบไม่ซ้ำและไม่ง่ายที่จะสันนิษฐานหรือคำนวณ
ตัวอย่าง
กิจวัตรประจำวันของบุคคลหากพิจารณาประกอบด้วยงานหลายประเภทซึ่งใช้ช่วงเวลาที่แตกต่างกันสำหรับการทำงานที่แตกต่างกัน ช่วงเวลาหรืองานจะไม่เกิดซ้ำอย่างต่อเนื่อง ตัวอย่างเช่นคนเราจะไม่แปรงฟันอย่างต่อเนื่องตั้งแต่เช้าจรดค่ำเช่นกันในช่วงเวลาเดียวกัน
กระบวนการดังกล่าวไม่ว่าจะเป็นอนาล็อกหรือดิจิทัลสามารถแสดงเป็นกราฟิกได้ดังนี้
โดยทั่วไปสัญญาณที่ใช้ในระบบสื่อสารจะเป็นแบบอนาล็อกซึ่งจะถูกส่งในรูปแบบแอนะล็อกหรือแปลงเป็นดิจิทัลแล้วส่งขึ้นอยู่กับข้อกำหนด
แต่สำหรับสัญญาณที่จะส่งไปยังระยะไกลโดยไม่มีผลกระทบจากการรบกวนภายนอกหรือการเพิ่มสัญญาณรบกวนใด ๆ และโดยไม่ต้องจางหายไปสัญญาณนั้นจะต้องผ่านกระบวนการที่เรียกว่า Modulationซึ่งจะกล่าวถึงในบทถัดไป
สัญญาณอาจเป็นอะไรก็ได้เช่นคลื่นเสียงที่ออกมาเมื่อคุณตะโกน เสียงตะโกนนี้สามารถได้ยินได้ในระยะที่กำหนด แต่สำหรับคลื่นเดียวกันในการเดินทางในระยะทางไกลคุณจะต้องมีเทคนิคที่ช่วยเพิ่มความแรงให้กับสัญญาณนี้โดยไม่รบกวนพารามิเตอร์ของสัญญาณเดิม
Signal Modulation คืออะไร?
สัญญาณที่ส่งข้อความจะต้องถูกส่งไปในระยะไกลและเพื่อสร้างการสื่อสารที่เชื่อถือได้จำเป็นต้องอาศัยความช่วยเหลือของสัญญาณความถี่สูงซึ่งไม่ควรส่งผลกระทบต่อลักษณะดั้งเดิมของสัญญาณข้อความ
หากมีการเปลี่ยนแปลงลักษณะของสัญญาณข้อความข้อความที่อยู่ในนั้นก็จะเปลี่ยนไปด้วยเช่นกัน ดังนั้นจึงเป็นเรื่องที่ต้องดูแลสัญญาณข้อความ สัญญาณความถี่สูงสามารถเดินทางได้ไกลขึ้นโดยไม่ได้รับผลกระทบจากสิ่งรบกวนภายนอก เราใช้ความช่วยเหลือของสัญญาณความถี่สูงซึ่งเรียกว่าเป็นcarrier signalเพื่อส่งสัญญาณข้อความของเรา กระบวนการดังกล่าวเรียกง่ายๆว่า Modulation
Modulation เป็นกระบวนการเปลี่ยนพารามิเตอร์ของสัญญาณพาหะตามค่าทันทีของสัญญาณมอดูเลต
ต้องการการมอดูเลต
สัญญาณเบสแบนด์ไม่เข้ากันสำหรับการส่งโดยตรง สำหรับสัญญาณดังกล่าวหากต้องการเดินทางในระยะทางไกลขึ้นความแรงของสัญญาณจะต้องเพิ่มขึ้นโดยการปรับคลื่นพาหะความถี่สูงซึ่งไม่ส่งผลกระทบต่อพารามิเตอร์ของสัญญาณมอดูเลต
ข้อดีของการมอดูเลต
เสาอากาศที่ใช้ในการส่งสัญญาณจะต้องมีขนาดใหญ่มากหากไม่มีการนำการมอดูเลตมาใช้ ช่วงการสื่อสารถูก จำกัด เนื่องจากคลื่นไม่สามารถเดินทางไปได้ไกลโดยไม่ผิดเพี้ยน
ต่อไปนี้เป็นข้อดีบางประการสำหรับการนำการมอดูเลตไปใช้ในระบบสื่อสาร
- ขนาดเสาอากาศลดลง
- ไม่มีสัญญาณผสมเกิดขึ้น
- ช่วงการสื่อสารเพิ่มขึ้น
- เกิดการมัลติเพล็กซ์ของสัญญาณ
- อนุญาตให้ปรับแบนด์วิดท์ได้
- คุณภาพการรับสัญญาณดีขึ้น
สัญญาณในกระบวนการมอดูเลต
ต่อไปนี้เป็นสัญญาณสามประเภทในกระบวนการมอดูเลต
ข้อความหรือสัญญาณมอดูเลต
สัญญาณที่มีข้อความที่จะส่งเรียกว่าเป็นไฟล์ message signal. มันเป็นสัญญาณเบสแบนด์ซึ่งต้องผ่านกระบวนการมอดูเลตจึงจะส่งได้ ดังนั้นจึงเรียกอีกอย่างว่าmodulating signal.
สัญญาณผู้ให้บริการ
สัญญาณความถี่สูงที่มีเฟสความถี่และแอมพลิจูดที่แน่นอน แต่ไม่มีข้อมูลเรียกว่าก carrier signal. มันเป็นสัญญาณที่ว่างเปล่า ใช้เพื่อส่งสัญญาณไปยังเครื่องรับหลังจากการมอดูเลต
สัญญาณมอดูเลต
สัญญาณผลลัพธ์หลังจากกระบวนการมอดูเลตเรียกว่า modulated signal. สัญญาณนี้เป็นการรวมกันของสัญญาณมอดูเลตและสัญญาณพาหะ
ประเภทของการมอดูเลต
การปรับมีหลายประเภท ขึ้นอยู่กับเทคนิคการมอดูเลตที่ใช้พวกเขาถูกจัดประเภทดังแสดงในรูปต่อไปนี้
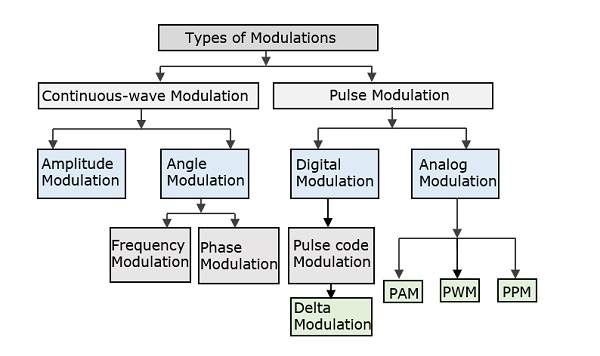
ประเภทของการมอดูเลตแบ่งออกเป็นคลื่นต่อเนื่องและการมอดูเลตแบบพัลส์
การมอดูเลตคลื่นต่อเนื่อง
ในการมอดูเลตคลื่นต่อเนื่องจะใช้คลื่นไซน์ความถี่สูงเป็นคลื่นพาหะ แบ่งออกเป็นแอมพลิจูดและมุมมอดูเลต
หากแอมพลิจูดของคลื่นพาหะความถี่สูงแตกต่างกันไปตามแอมพลิจูดทันทีของสัญญาณมอดูเลตเทคนิคดังกล่าวจะเรียกว่าเป็น Amplitude Modulation.
หากมุมของคลื่นพาหะแตกต่างกันไปตามค่าทันทีของสัญญาณมอดูเลตเทคนิคดังกล่าวจะเรียกว่าเป็น Angle Modulation.
หากความถี่ของคลื่นพาหะแตกต่างกันไปตามค่าทันทีของสัญญาณมอดูเลตเทคนิคดังกล่าวจะเรียกว่าเป็น Frequency Modulation.
หากเฟสของคลื่นพาหะความถี่สูงแตกต่างกันไปตามค่าทันทีของสัญญาณมอดูเลตเทคนิคดังกล่าวจะเรียกว่าเป็น Phase Modulation.
การมอดูเลตมุมจะแบ่งออกเป็นความถี่และการมอดูเลตเฟส
การปรับพัลส์
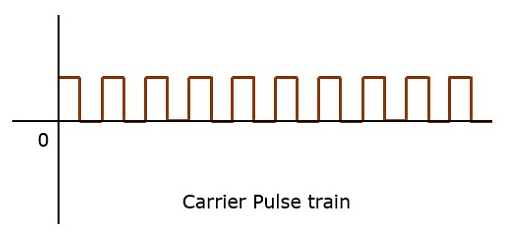
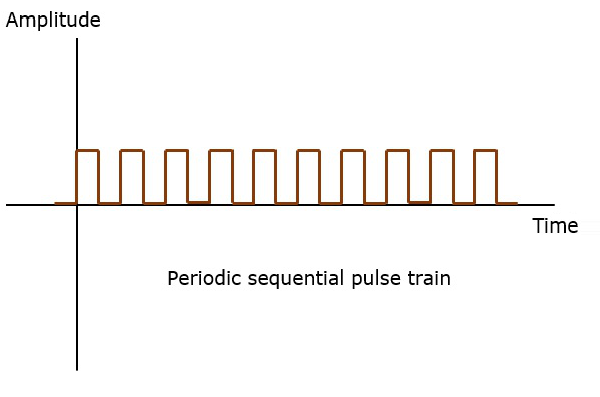
ในการมอดูเลตแบบพัลส์จะใช้ลำดับระยะของพัลส์สี่เหลี่ยมเป็นคลื่นพาหะ ซึ่งจะแบ่งออกเป็นการมอดูเลตแบบอนาล็อกและดิจิตอล
ใน analog modulation เทคนิคหากแอมพลิจูดระยะเวลาหรือตำแหน่งของพัลส์แตกต่างกันไปตามค่าทันทีของสัญญาณมอดูเลตเบสแบนด์เทคนิคดังกล่าวเรียกว่า Pulse Amplitude Modulation (PAM) หรือ Pulse Duration/Width Modulation (PDM/PWM), หรือ Pulse Position Modulation (PPM).
ใน digital modulationเทคนิคการมอดูเลตที่ใช้คือ Pulse Code Modulation (PCM)โดยที่สัญญาณแอนะล็อกจะถูกแปลงเป็นรูปแบบดิจิทัล 1 วินาทีและ 0 วินาที เนื่องจากผลลัพธ์คือรถไฟพัลส์รหัสจึงเรียกว่า PCM ซึ่งได้รับการพัฒนาเพิ่มเติมเป็นDelta Modulation (DM)ซึ่งจะกล่าวถึงในบทต่อ ๆ ไป ดังนั้น PCM จึงเป็นเทคนิคที่สัญญาณอนาล็อกจะถูกแปลงเป็นรูปแบบดิจิทัล
ในระบบการสื่อสารใด ๆ ในระหว่างการส่งสัญญาณหรือในขณะที่รับสัญญาณสัญญาณที่ไม่ต้องการบางอย่างจะถูกนำเข้าสู่การสื่อสารซึ่งทำให้ผู้รับไม่พึงพอใจและตั้งคำถามถึงคุณภาพของการสื่อสาร ความวุ่นวายดังกล่าวเรียกว่าNoise.
Noise คืออะไร?
เสียงรบกวนคือ unwanted signalซึ่งรบกวนสัญญาณข้อความต้นฉบับและทำให้พารามิเตอร์ของสัญญาณข้อความเสียหาย การเปลี่ยนแปลงในกระบวนการสื่อสารนี้นำไปสู่การเปลี่ยนแปลงข้อความ โดยมากจะป้อนที่ช่องหรือเครื่องรับ
สัญญาณรบกวนสามารถเข้าใจได้โดยดูตัวอย่างต่อไปนี้

ดังนั้นจึงเข้าใจว่าสัญญาณรบกวนคือสัญญาณบางอย่างที่ไม่มีรูปแบบและไม่มีความถี่หรือแอมพลิจูดคงที่ มันค่อนข้างสุ่มและคาดเดาไม่ได้ มักใช้มาตรการเพื่อลดแม้ว่าจะไม่สามารถกำจัดได้ทั้งหมด
ตัวอย่างเสียงรบกวนที่พบบ่อย ได้แก่ -
Hiss เสียงในเครื่องรับวิทยุ
Buzz เสียงท่ามกลางการสนทนาทางโทรศัพท์
Flicker ในเครื่องรับโทรทัศน์ ฯลฯ
ผลกระทบของเสียง
เสียงรบกวนเป็นคุณสมบัติที่ไม่สะดวกซึ่งส่งผลต่อประสิทธิภาพของระบบ ต่อไปนี้เป็นผลกระทบของเสียง
เสียงรบกวน จำกัด ช่วงการทำงานของระบบ
สัญญาณรบกวนจะ จำกัด สัญญาณที่อ่อนที่สุดโดยทางอ้อมซึ่งแอมพลิฟายเออร์สามารถขยายได้ ออสซิลเลเตอร์ในวงจรมิกเซอร์อาจ จำกัด ความถี่เนื่องจากเสียงรบกวน การทำงานของระบบขึ้นอยู่กับการทำงานของวงจร สัญญาณรบกวน จำกัด สัญญาณที่เล็กที่สุดที่เครื่องรับสามารถประมวลผลได้
เสียงรบกวนมีผลต่อความไวของเครื่องรับ
ความไวคือจำนวนสัญญาณอินพุตขั้นต่ำที่จำเป็นเพื่อให้ได้เอาต์พุตคุณภาพที่ระบุ สัญญาณรบกวนมีผลต่อความไวของระบบรับซึ่งส่งผลต่อเอาต์พุตในที่สุด
ประเภทของเสียงรบกวน
การจำแนกประเภทของสัญญาณรบกวนนั้นขึ้นอยู่กับประเภทของแหล่งสัญญาณเอฟเฟกต์ที่แสดงหรือความสัมพันธ์ที่มีกับเครื่องรับเป็นต้น
มีสองวิธีหลักในการสร้างเสียงรบกวน หนึ่งคือผ่านบางexternal source ในขณะที่อีกอันสร้างโดยไฟล์ internal sourceภายในส่วนเครื่องรับ
แหล่งภายนอก
เสียงนี้เกิดจากแหล่งภายนอกซึ่งอาจเกิดขึ้นในสื่อหรือช่องทางการสื่อสารโดยปกติ เสียงรบกวนนี้ไม่สามารถกำจัดได้ทั้งหมด วิธีที่ดีที่สุดคือการหลีกเลี่ยงไม่ให้เสียงรบกวนสัญญาณ
ตัวอย่าง
ตัวอย่างที่พบบ่อยที่สุดของเสียงประเภทนี้ ได้แก่ -
เสียงรบกวนในบรรยากาศ (เนื่องจากความผิดปกติในบรรยากาศ)
เสียงรบกวนภายนอกเช่นเสียงจากแสงอาทิตย์และเสียงรบกวนจากจักรวาล
เสียงอุตสาหกรรม
แหล่งที่มาภายใน
สัญญาณรบกวนนี้เกิดจากส่วนประกอบของเครื่องรับขณะทำงาน ส่วนประกอบในวงจรเนื่องจากการทำงานอย่างต่อเนื่องอาจก่อให้เกิดเสียงรบกวนบางประเภท เสียงนี้สามารถวัดได้ การออกแบบตัวรับสัญญาณที่เหมาะสมอาจลดผลกระทบของเสียงรบกวนภายในนี้
ตัวอย่าง
ตัวอย่างที่พบบ่อยที่สุดของเสียงประเภทนี้ ได้แก่ -
เสียงรบกวนจากความร้อน (เสียงของจอห์นสันหรือเสียงไฟฟ้า)
เสียงรบกวน (เนื่องจากการเคลื่อนที่แบบสุ่มของอิเล็กตรอนและรู)
เสียงรบกวนเวลาขนส่ง (ระหว่างการเปลี่ยนแปลง)
เสียงรบกวนอื่น ๆ เป็นเสียงรบกวนอีกประเภทหนึ่งซึ่งรวมถึงการสั่นไหวเอฟเฟกต์ความต้านทานและเสียงรบกวนที่สร้างจากเครื่องผสมเป็นต้น
อัตราส่วนสัญญาณต่อเสียงรบกวน
Signal-to-Noise Ratio (SNR) คือ ratio of the signal power to the noise power. ยิ่งค่า SNR สูงเท่าใดคุณภาพของผลลัพธ์ที่ได้รับก็จะยิ่งมากขึ้นเท่านั้น
อัตราส่วนสัญญาณต่อสัญญาณรบกวน ณ จุดต่าง ๆ สามารถคำนวณได้โดยใช้สูตรต่อไปนี้ -
$$ Input \: SNR = (SNR) _I = \ frac {Average \: power \: of \: modulating \: signal} {Average \: power \: of \: noise \: at \: input} $$
$$ Output \: SNR = (SNR) _O = \ frac {Average \: power \: of \: demodulated \: signal} {Average \: power \: of \: noise \: at \: output} $$
ร่างของบุญ
อัตราส่วนของ output SNR to the input SNR สามารถเรียกได้ว่าเป็นไฟล์ Figure of merit (F). แสดงโดยF. อธิบายถึงประสิทธิภาพของอุปกรณ์
$$ F = \ frac {(SNR) _O} {(SNR) _I} $$
รูปบุญของผู้รับคือ -
$$ F = \ frac {(SNR) _O} {(SNR) _C} $$
เป็นเช่นนั้นเพราะสำหรับเครื่องรับช่องสัญญาณคืออินพุต
ในการวิเคราะห์สัญญาณจะต้องมีตัวแทน การเป็นตัวแทนในระบบการสื่อสารมีสองประเภท -
- การแสดงโดเมนความถี่และ
- การแสดงโดเมนเวลา
พิจารณาสัญญาณสองสัญญาณที่มีความถี่ 1 kHz และ 2 kHz ทั้งสองแสดงในโดเมนเวลาและความถี่ดังแสดงในรูปต่อไปนี้
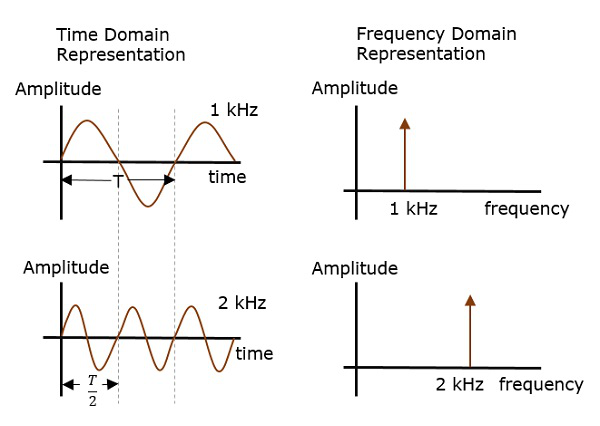
การวิเคราะห์โดเมนเวลาให้พฤติกรรมของสัญญาณในช่วงเวลาหนึ่ง ในโดเมนความถี่สัญญาณจะถูกวิเคราะห์เป็นฟังก์ชันทางคณิตศาสตร์ที่เกี่ยวข้องกับความถี่
จำเป็นต้องมีการแสดงโดเมนความถี่ในการประมวลผลสัญญาณเช่นการกรองการขยายและการผสม
ตัวอย่างเช่นหากพิจารณาสัญญาณดังต่อไปนี้ให้เข้าใจว่ามีสัญญาณรบกวนอยู่
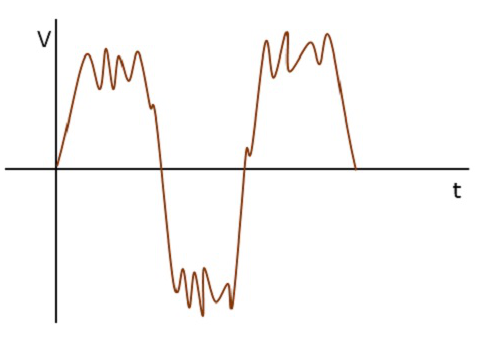
ความถี่ของสัญญาณดั้งเดิมอาจเป็น 1 kHz แต่ไม่ทราบสัญญาณรบกวนของความถี่บางความถี่ซึ่งทำให้สัญญาณนี้เสียหาย อย่างไรก็ตามเมื่อสัญญาณเดียวกันแสดงในโดเมนความถี่โดยใช้เครื่องวิเคราะห์สเปกตรัมสัญญาณจะถูกพล็อตดังแสดงในรูปต่อไปนี้
ที่นี่เราสามารถสังเกตเห็นฮาร์มอนิกเพียงเล็กน้อยซึ่งแสดงถึงสัญญาณรบกวนที่นำเข้าสู่สัญญาณดั้งเดิม ดังนั้นการแสดงสัญญาณจึงช่วยในการวิเคราะห์สัญญาณ
การวิเคราะห์โดเมนความถี่ช่วยในการสร้างรูปแบบคลื่นที่ต้องการ ตัวอย่างเช่นรูปแบบบิตไบนารีในคอมพิวเตอร์รูปแบบ Lissajous ใน CRO เป็นต้นการวิเคราะห์โดเมนเวลาช่วยให้เข้าใจรูปแบบบิตดังกล่าว
ในบรรดาเทคนิคการมอดูเลตประเภทหลักคือการมอดูเลตคลื่นต่อเนื่องและการมอดูเลตแบบพัลส์ เทคนิคการมอดูเลตคลื่นต่อเนื่องแบ่งออกเป็นAmplitude Modulation และ Angle Modulation.
คลื่นต่อเนื่องดำเนินไปอย่างต่อเนื่องโดยไม่มีช่วงเวลาใด ๆ และเป็นสัญญาณข้อความเบสแบนด์ซึ่งมีข้อมูล คลื่นนี้จะต้องมีการมอดูเลต
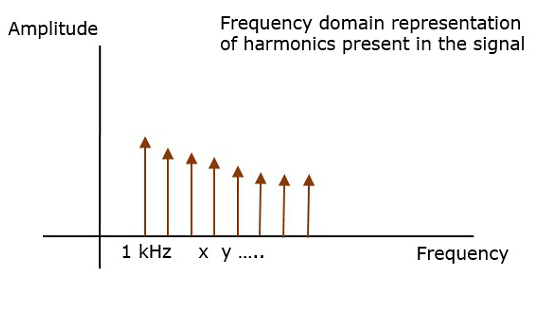
ตามคำจำกัดความมาตรฐาน "ความกว้างของสัญญาณพาหะจะแตกต่างกันไปตามแอมพลิจูดของสัญญาณมอดูเลตในทันที" ซึ่งหมายความว่าแอมพลิจูดของสัญญาณพาหะซึ่งไม่มีข้อมูลแตกต่างกันไปตามความกว้างของสัญญาณในแต่ละช่วงเวลาซึ่งมีข้อมูล สิ่งนี้สามารถอธิบายได้ดีจากตัวเลขต่อไปนี้
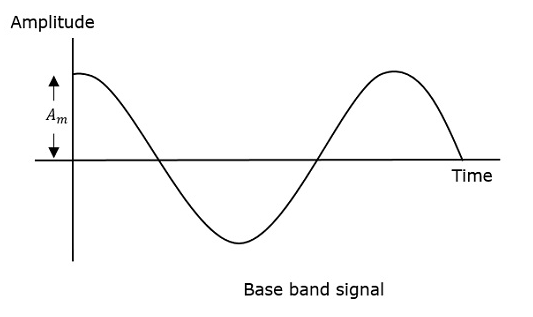
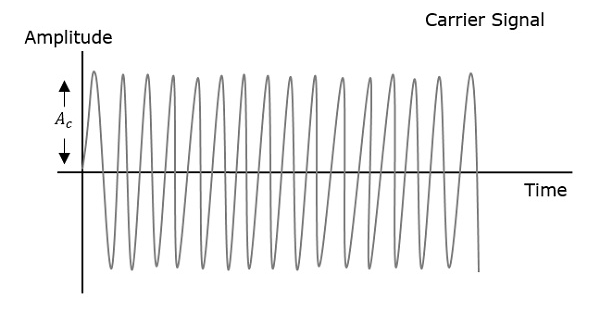
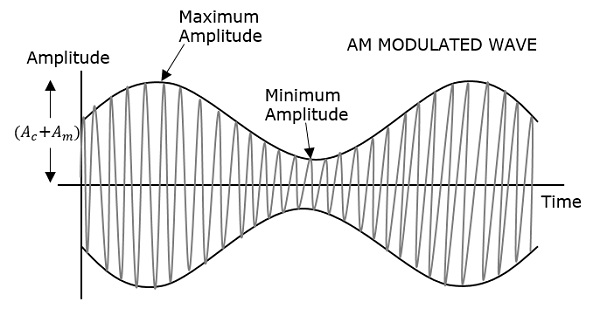
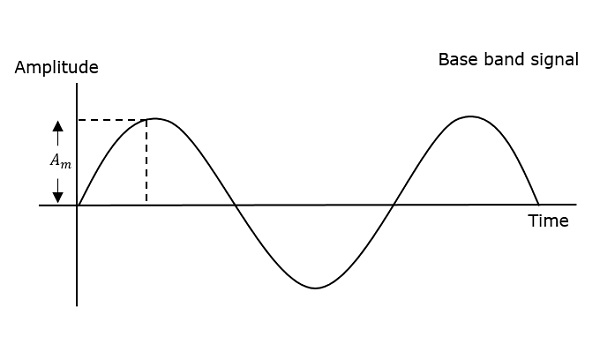
คลื่นมอดูเลตที่แสดงก่อนคือสัญญาณข้อความ อันถัดไปคือคลื่นพาหะซึ่งเป็นเพียงสัญญาณความถี่สูงและไม่มีข้อมูล ในขณะที่อันสุดท้ายคือคลื่นมอดูเลตที่เป็นผลลัพธ์
จะสังเกตได้ว่ายอดบวกและลบของคลื่นพาหะนั้นเชื่อมต่อกันด้วยเส้นสมมุติ เส้นนี้ช่วยสร้างรูปร่างที่แน่นอนของสัญญาณมอดูเลต เส้นสมมุติบนคลื่นพาหะนี้เรียกว่า asEnvelope. มันเป็นเช่นเดียวกับสัญญาณข้อความ
นิพจน์ทางคณิตศาสตร์
ต่อไปนี้เป็นนิพจน์ทางคณิตศาสตร์สำหรับคลื่นเหล่านี้
การเป็นตัวแทนโดเมนเวลาของคลื่น
ให้สัญญาณมอดูเลตเป็น -
$$ m (t) = A_mcos (2 \ pi f_mt) $$
ให้สัญญาณผู้ให้บริการ -
$$ c (t) = A_ccos (2 \ pi f_ct) $$
ที่ไหน Am = แอมพลิจูดสูงสุดของสัญญาณมอดูเลต
Ac = แอมพลิจูดสูงสุดของสัญญาณพาหะ
รูปแบบมาตรฐานของคลื่นแอมพลิจูดมอดูเลตถูกกำหนดเป็น -
$$ S (t) = A_c [1 + K_am (t)] cos (2 \ pi f_ct) $$
$$ S (t) = A_c [1+ \ mu cos (2 \ pi f_mt)] cos (2 \ pi f_ct) $$
$$ ที่ไหน \ mu = K_aA_m $$
ดัชนีการมอดูเลต
คลื่นพาหะหลังจากถูกมอดูเลตแล้วหากคำนวณระดับมอดูเลตแล้วความพยายามดังกล่าวจะเรียกว่าเป็น Modulation Index หรือ Modulation Depth. มันระบุระดับของการมอดูเลตที่คลื่นพาหะได้รับ
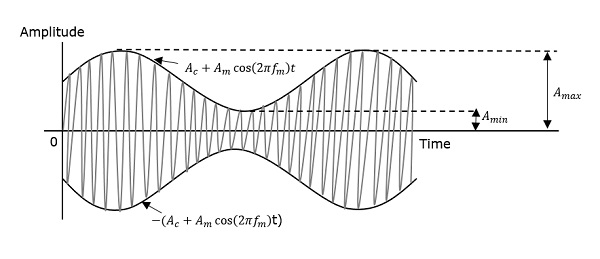
ค่าสูงสุดและต่ำสุดของซองจดหมายของคลื่นมอดูเลตจะแสดงด้วยA maxและA minตามลำดับ
ให้เราลองพัฒนาสมการสำหรับ Modulation Index
$$ A_ {max} = A_c (1+ \ mu) $$
เนื่องจากที่ A สูงสุดค่าของ cos θคือ 1
$$ A_ {min} = A_c (1- \ mu) $$
เนื่องจากที่ A นาทีค่า cos θจึงเท่ากับ -1
$$ \ frac {A_ {max}} {A_ {min}} = \ frac {1+ \ mu} {1- \ mu} $$
$$ A_ {max} - \ mu A_ {max} = A_ {min} + \ mu A_ {min} $$
$$ - \ mu (A_ {max} + A_ {min}) = A_ {min} -A_ {max} $$
$$ \ mu = \ frac {A_ {max} -A_ {min}} {A_ {max} + A_ {min}} $$
ดังนั้นจึงได้สมการของ Modulation Index µหมายถึงดัชนีการมอดูเลตหรือความลึกของการมอดูเลต ซึ่งมักจะแสดงเป็นเปอร์เซ็นต์ที่เรียกว่าPercentage Modulation. เป็นขอบเขตของการมอดูเลตแสดงเป็นเปอร์เซ็นต์และแสดงด้วยm.
สำหรับการมอดูเลตที่สมบูรณ์แบบค่าของดัชนีการมอดูเลตควรเป็น 1 ซึ่งหมายความว่าความลึกของการมอดูเลตควรเป็น 100%
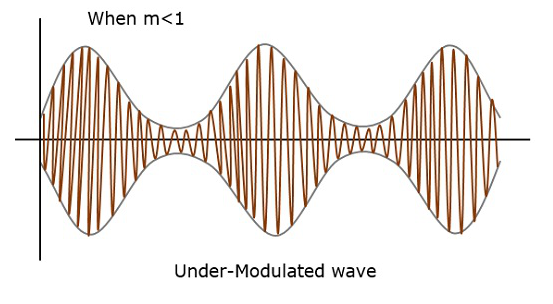
ตัวอย่างเช่นถ้าค่านี้น้อยกว่า 1 นั่นคือดัชนีการมอดูเลตคือ 0.5 ดังนั้นเอาต์พุตที่มอดูเลตจะมีลักษณะดังรูปต่อไปนี้ เรียกว่า Under-modulation คลื่นดังกล่าวเรียกว่าเป็นunder-modulated wave.
ถ้าค่าของดัชนีการมอดูเลตมากกว่า 1 เช่น 1.5 หรือมากกว่านั้นคลื่นจะเป็น over-modulated wave. จะมีลักษณะดังรูปต่อไปนี้

เมื่อค่าดัชนีการมอดูเลตเพิ่มขึ้นผู้ให้บริการจะประสบกับการกลับเฟส 180 °ซึ่งทำให้เกิดแถบด้านข้างเพิ่มเติมและด้วยเหตุนี้คลื่นจึงบิดเบี้ยว คลื่นที่มีการมอดูเลตมากเกินไปทำให้เกิดการรบกวนซึ่งไม่สามารถกำจัดได้
แบนด์วิดท์ของ Amplitude Modulation
แบนด์วิดท์คือความแตกต่างระหว่างความถี่ต่ำสุดและสูงสุดของสัญญาณ
สำหรับคลื่นที่มอดูเลตแอมพลิจูดแบนด์วิดท์จะถูกกำหนดโดย
$$ BW = f_ {USB} -f_ {LSB} $$
$$ (f_c + f_m) - (f_c-f_m) $$
$$ = 2f_m = 2W $$
ที่ไหน W คือแบนด์วิดท์ของข้อความ
ดังนั้นเราต้องรู้ว่าแบนด์วิดท์ที่ต้องการสำหรับคลื่นมอดูเลตแอมพลิจูดเป็นสองเท่าของความถี่ของสัญญาณมอดูเลต
ในกระบวนการของ Amplitude Modulation หรือ Phase Modulation คลื่นมอดูเลตประกอบด้วยคลื่นพาหะและแถบด้านข้างสองเส้น สัญญาณมอดูเลตมีข้อมูลในแถบทั้งหมดยกเว้นที่ความถี่พาหะ
ไซด์แบนด์
ก Sidebandเป็นย่านความถี่ที่มีกำลังซึ่งเป็นความถี่ที่ต่ำกว่าและสูงกว่าของความถี่พาหะ แถบด้านข้างทั้งสองมีข้อมูลเดียวกัน การแสดงคลื่นมอดูเลตแอมพลิจูดในโดเมนความถี่ดังแสดงในรูปต่อไปนี้

แถบด้านข้างทั้งสองในภาพมีข้อมูลเหมือนกัน การส่งสัญญาณดังกล่าวซึ่งมีผู้ให้บริการพร้อมกับแถบด้านข้างสองเส้นสามารถเรียกได้ว่าเป็นDouble Sideband Full Carrier ระบบหรือง่ายๆ DSB-FC. มันถูกพล็อตดังแสดงในรูปต่อไปนี้

อย่างไรก็ตามการส่งสัญญาณดังกล่าวไม่มีประสิทธิภาพ พลังงานสองในสามกำลังสูญเสียไปในสายการบินซึ่งไม่มีข้อมูลใด ๆ
หากผู้ให้บริการนี้ถูกระงับและพลังงานที่บันทึกไว้ถูกกระจายไปยังแถบด้านข้างทั้งสองกระบวนการดังกล่าวจะเรียกว่าเป็น Double Sideband Suppressed Carrier ระบบหรือง่ายๆ DSBSC. มันถูกพล็อตดังแสดงในรูปต่อไปนี้

ตอนนี้เราได้ความคิดว่าเนื่องจากไซด์แบนด์ทั้งสองมีข้อมูลเดียวกันสองครั้งทำไมเราจึงไม่สามารถระงับไซด์แบนด์หนึ่งได้ ใช่เป็นไปได้
กระบวนการระงับแถบด้านข้างตัวใดตัวหนึ่งพร้อมกับผู้ให้บริการและการส่งแถบด้านข้างเดียวเรียกว่าเป็น Single Sideband Suppressed Carrier ระบบหรือง่ายๆ SSB-SC หรือ SSB. มันถูกพล็อตดังแสดงในรูปต่อไปนี้
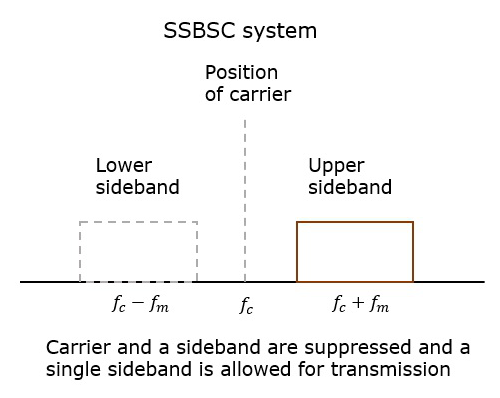
ระบบ SSB-SC หรือ SSB นี้ซึ่งส่งแถบด้านข้างเดียวมีกำลังสูงเนื่องจากพลังงานที่จัดสรรให้ทั้งผู้ให้บริการและแถบด้านข้างอื่น ๆ จะใช้ในการส่งสัญญาณนี้ Single Sideband (SSB).
ดังนั้นการมอดูเลตที่ทำโดยใช้เทคนิค SSB นี้จึงเรียกว่า SSB Modulation.
Sideband Modulation - ข้อดี
ข้อดีของการมอดูเลต SSB คือ -
แบนด์วิดท์หรือพื้นที่สเปกตรัมที่ใช้งานน้อยกว่าสัญญาณ AM และ DSB
อนุญาตให้ส่งสัญญาณจำนวนมากขึ้น
ประหยัดพลังงาน
สามารถส่งสัญญาณกำลังสูงได้
มีเสียงรบกวนน้อยลง
การซีดจางของสัญญาณมีโอกาสน้อยที่จะเกิดขึ้น
Sideband Modulation - ข้อเสีย
ข้อเสียของการมอดูเลต SSB คือ -
การสร้างและตรวจจับสัญญาณ SSB เป็นกระบวนการที่ซับซ้อน
คุณภาพของสัญญาณจะได้รับผลกระทบเว้นแต่ตัวส่งและตัวรับ SSB จะมีเสถียรภาพความถี่ที่ดีเยี่ยม
Sideband Modulation - แอปพลิเคชัน
การประยุกต์ใช้การมอดูเลต SSB คือ -
สำหรับความต้องการประหยัดพลังงานและความต้องการแบนด์วิดท์ต่ำ
ในการสื่อสารเคลื่อนที่ทางบกทางอากาศและทางทะเล
ในการสื่อสารแบบจุดต่อจุด
ในการสื่อสารทางวิทยุ.
ในการสื่อสารทางโทรทัศน์โทรมาตรและเรดาร์
ด้านการสื่อสารทางทหารเช่นวิทยุสมัครเล่นเป็นต้น
ในกรณีของการมอดูเลต SSB เมื่อไซด์แบนด์ถูกส่งผ่านฟิลเตอร์ตัวกรองแบนด์พาสอาจทำงานได้ไม่สมบูรณ์ในทางปฏิบัติ ด้วยเหตุนี้ข้อมูลบางส่วนอาจสูญหายไป
ดังนั้นเพื่อหลีกเลี่ยงการสูญเสียนี้จึงมีการเลือกใช้เทคนิคซึ่งเป็นการประนีประนอมระหว่างกัน DSB-SC และ SSBเรียกว่า Vestigial Sideband (VSB)เทคนิค. คำว่าร่องรอยซึ่งหมายถึง "ส่วนหนึ่ง" ซึ่งมาจากชื่อนี้
Vestigial Sideband
ไซด์แบนด์ทั้งสองไม่จำเป็นสำหรับการส่งเนื่องจากเป็นการสิ้นเปลือง แต่หากมีการส่งข้อมูลเพียงแถบเดียวจะทำให้ข้อมูลสูญหาย ดังนั้นเทคนิคนี้จึงมีการพัฒนา
Vestigial Sideband Modulation หรือ VSB Modulation เป็นกระบวนการที่ส่วนหนึ่งของสัญญาณเรียกว่าเป็น vestigeถูกมอดูเลตพร้อมกับแถบด้านข้างหนึ่งอัน สามารถพล็อตสัญญาณ VSB ได้ดังแสดงในรูปต่อไปนี้
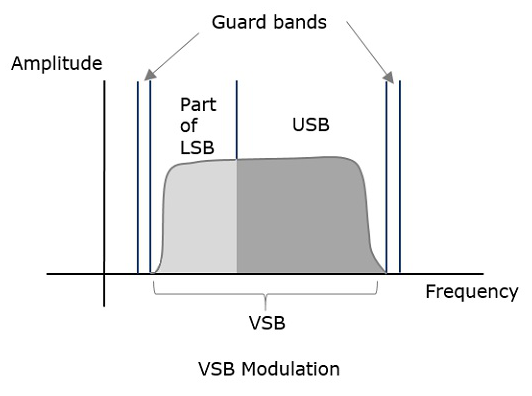
นอกเหนือจากแถบด้านข้างด้านบนแล้วส่วนหนึ่งของแถบด้านข้างด้านล่างจะถูกส่งไปในเทคนิคนี้ด้วย แถบป้องกันที่มีความกว้างน้อยมากวางไว้ที่ด้านใดด้านหนึ่งของ VSB เพื่อหลีกเลี่ยงการรบกวน การมอดูเลต VSB ส่วนใหญ่จะใช้ในการส่งสัญญาณโทรทัศน์
แบนด์วิดท์การส่ง
แบนด์วิดท์การส่งของคลื่นมอดูเลต VSB แสดงเป็น -
$$ B = (f_ {m} + f_ {v}) Hz $$
ที่ไหน
fm = แบนด์วิดท์ข้อความ
fv = ความกว้างของแถบด้านข้างร่องรอย
VSB Modulation - ข้อดี
ต่อไปนี้เป็นข้อดีของ VSB -
มีประสิทธิภาพสูง
ลดแบนด์วิดท์
การออกแบบตัวกรองทำได้ง่ายเนื่องจากไม่ต้องการความแม่นยำสูง
การส่งส่วนประกอบความถี่ต่ำทำได้โดยไม่ยาก
มีลักษณะเฟสที่ดี
VSB Modulation - ข้อเสีย
ต่อไปนี้เป็นข้อเสียของ VSB -
แบนด์วิดท์เมื่อเทียบกับ SSB นั้นมากกว่า
Demodulation มีความซับซ้อน
VSB Modulation - แอปพลิเคชัน
การประยุกต์ใช้ VSB ที่โดดเด่นที่สุดและเป็นมาตรฐานสำหรับการส่งไฟล์ television signals. นอกจากนี้นี่เป็นเทคนิคที่สะดวกและมีประสิทธิภาพที่สุดเมื่อพิจารณาการใช้แบนด์วิดท์
การมอดูเลตประเภทอื่นในการมอดูเลตคลื่นต่อเนื่องคือ Angle Modulation. Angle Modulation คือกระบวนการที่ความถี่หรือเฟสของพาหะแปรผันตามสัญญาณข้อความ ซึ่งจะแบ่งออกเป็นการมอดูเลตความถี่และเฟส
การมอดูเลตความถี่เป็นกระบวนการเปลี่ยนความถี่ของสัญญาณพาหะเชิงเส้นกับสัญญาณข้อความ
Phase Modulation คือกระบวนการเปลี่ยนเฟสของสัญญาณพาหะเชิงเส้นกับสัญญาณข้อความ
ตอนนี้ให้เราพูดคุยเกี่ยวกับหัวข้อเหล่านี้โดยละเอียดยิ่งขึ้น
การปรับความถี่
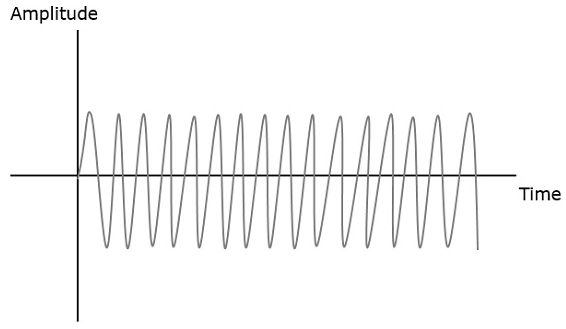
ในการมอดูเลตแอมพลิจูดแอมพลิจูดของพาหะจะแตกต่างกันไป แต่ในการมอดูเลตความถี่ (FM) ความถี่ของสัญญาณพาหะจะแตกต่างกันไปตามแอมพลิจูดทันทีของสัญญาณมอดูเลต
แอมพลิจูดและเฟสของสัญญาณพาหะยังคงคงที่ในขณะที่ความถี่ของพาหะเปลี่ยนไป สิ่งนี้สามารถเข้าใจได้ดีขึ้นโดยสังเกตจากตัวเลขต่อไปนี้

ความถี่ของคลื่นมอดูเลตจะคงที่เช่นเดียวกับความถี่คลื่นพาหะเมื่อสัญญาณข้อความอยู่ที่ศูนย์ ความถี่จะเพิ่มขึ้นเมื่อสัญญาณข้อความถึงแอมพลิจูดสูงสุด
ซึ่งหมายความว่าเมื่อเพิ่มแอมพลิจูดของสัญญาณมอดูเลตหรือข้อความความถี่ของพาหะจะเพิ่มขึ้น ในทำนองเดียวกันเมื่อแอมพลิจูดของสัญญาณมอดูเลตลดลงความถี่ก็จะลดลงด้วย
การเป็นตัวแทนทางคณิตศาสตร์
ให้ความถี่ของผู้ให้บริการเป็น fc
ความถี่ที่แอมพลิจูดสูงสุดของสัญญาณข้อความ = fc + Δf
ความถี่ที่แอมพลิจูดต่ำสุดของสัญญาณข้อความ = fc - Δf
ความแตกต่างระหว่างความถี่มอดูเลต FM และความถี่ปกติเรียกว่า Frequency Deviation และแสดงโดย Δf.
ความเบี่ยงเบนของความถี่ของสัญญาณพาหะจากสูงไปต่ำหรือต่ำไปสูงสามารถเรียกได้ว่าเป็น Carrier Swing.
Carrier Swing = 2 ×ส่วนเบี่ยงเบนความถี่
= 2 × Δf
สมการสำหรับ FM WAVE
สมการของคลื่น FM คือ -
$$ s (t) = A_ccos [W_ct + 2 \ pi k_fm (t)] $$
ที่ไหน
Ac = แอมพลิจูดของพาหะ
wc = ความถี่เชิงมุมของพาหะ = 2πfc
m(t) = สัญญาณข้อความ
FM สามารถแบ่งออกเป็น Narrowband FM และ Wideband FM.
Narrowband FM
คุณสมบัติของ Narrowband FM มีดังต่อไปนี้ -
การมอดูเลตความถี่นี้มีแบนด์วิดท์ขนาดเล็ก
ดัชนีการมอดูเลตมีขนาดเล็ก
สเปกตรัมประกอบด้วยผู้ให้บริการ USB และ LSB
ใช้ในการสื่อสารเคลื่อนที่เช่นระบบไร้สายของตำรวจรถพยาบาลรถแท็กซี่เป็นต้น
Wideband FM
คุณสมบัติของ Wideband FM มีดังต่อไปนี้ -
การมอดูเลตความถี่นี้มีแบนด์วิดท์ไม่สิ้นสุด
ดัชนีการมอดูเลตมีขนาดใหญ่กล่าวคือสูงกว่า 1.
สเปกตรัมของมันประกอบด้วยพาหะและไซด์แบนด์จำนวนไม่ จำกัด ซึ่งตั้งอยู่รอบ ๆ
ใช้ในแอปพลิเคชั่นการออกอากาศเพื่อความบันเทิงเช่นวิทยุ FM ทีวีเป็นต้น
การปรับเฟส
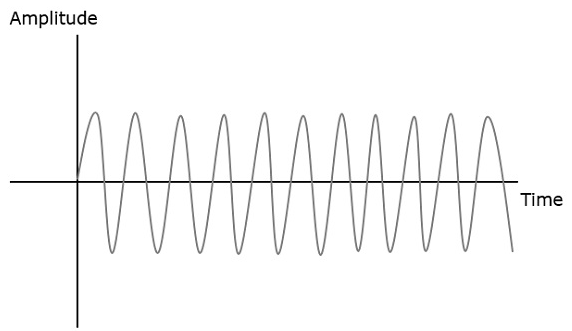
ในการมอดูเลตความถี่ความถี่ของพาหะแตกต่างกันไป แต่ในPhase Modulation (PM)เฟสของสัญญาณพาหะจะแตกต่างกันไปตามแอมพลิจูดของสัญญาณมอดูเลตในทันที
แอมพลิจูดและความถี่ของสัญญาณพาหะยังคงคงที่ในขณะที่เฟสของพาหะเปลี่ยนไป สิ่งนี้สามารถเข้าใจได้ดีขึ้นโดยสังเกตจากตัวเลขต่อไปนี้

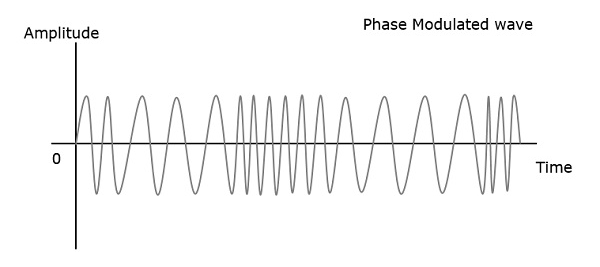
เฟสของคลื่นมอดูเลตมีจุดที่ไม่สิ้นสุดซึ่งการเปลี่ยนเฟสในคลื่นสามารถเกิดขึ้นได้ แอมพลิจูดทันทีของสัญญาณมอดูเลตเปลี่ยนเฟสของพาหะ เมื่อแอมพลิจูดเป็นบวกเฟสจะเปลี่ยนไปในทิศทางเดียวและหากแอมพลิจูดเป็นลบเฟสจะเปลี่ยนไปในทิศทางตรงกันข้าม
ความสัมพันธ์ระหว่าง PM และ FM
การเปลี่ยนเฟสเปลี่ยนความถี่ของคลื่นมอดูเลต ความถี่ของคลื่นยังเปลี่ยนเฟสของคลื่น แม้ว่าจะมีความสัมพันธ์กัน แต่ความสัมพันธ์ของทั้งคู่ไม่ได้เป็นแบบเส้นตรง การมอดูเลตเฟสเป็นวิธีการทางอ้อมในการผลิต FM จำนวนของการเปลี่ยนความถี่ที่เกิดจากโมดูเลเตอร์เฟสจะเพิ่มขึ้นตามความถี่มอดูเลต มีการใช้อีควอไลเซอร์เสียงเพื่อชดเชยสิ่งนี้
สมการสำหรับคลื่น PM
สมการของคลื่น PM คือ -
$$ s (t) = A_ccos [W_ct + k_pm (t)] $$
ที่ไหน
Ac = แอมพลิจูดของพาหะ
wc = ความถี่เชิงมุมของพาหะ = 2πfc
m(t) = สัญญาณข้อความ
การมอดูเลตเฟสใช้ในระบบสื่อสารเคลื่อนที่ในขณะที่การมอดูเลตความถี่ส่วนใหญ่ใช้สำหรับการแพร่ภาพ FM
Multiplexing เป็นกระบวนการรวมสัญญาณหลายสัญญาณเป็นสัญญาณเดียวผ่านสื่อที่ใช้ร่วมกัน
กระบวนการนี้เรียกว่า analog multiplexing หากสัญญาณเหล่านี้มีลักษณะเป็นอนาล็อก
หากสัญญาณดิจิทัลเป็นมัลติเพล็กซ์จะเรียกว่าเป็น digital multiplexing.
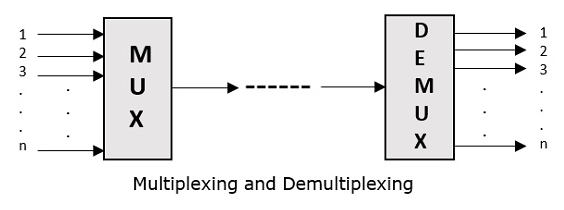
การมัลติเพล็กซ์ได้รับการพัฒนาขึ้นครั้งแรกในระบบโทรศัพท์ สัญญาณจำนวนหนึ่งถูกรวมเข้าด้วยกันเพื่อส่งผ่านสายเคเบิลเส้นเดียว กระบวนการมัลติเพล็กซ์แบ่งช่องทางการสื่อสารออกเป็นช่องทางลอจิคัลหลายช่องโดยแบ่งแต่ละช่องสัญญาณสำหรับสัญญาณข้อความหรือสตรีมข้อมูลที่จะถ่ายโอน อุปกรณ์ที่ทำมัลติเพล็กซ์สามารถเรียกได้ว่าเป็นไฟล์MUX.
กระบวนการย้อนกลับคือการแยกจำนวนช่องสัญญาณออกจากช่องหนึ่งซึ่งทำที่เครื่องรับเรียกว่าเป็น demultiplexing. อุปกรณ์ที่ทำ demultiplexing เรียกว่าเป็นDEMUX.
ตัวเลขต่อไปนี้แสดงให้เห็นถึงแนวคิดของ MUX และ DEMUX การใช้งานหลักอยู่ในด้านการสื่อสาร
ประเภทของ Multiplexers
มัลติเพล็กเซอร์ส่วนใหญ่มีสองประเภท ได้แก่ อนาล็อกและดิจิตอล พวกเขาแบ่งออกเป็น FDM, WDM และ TDM เพิ่มเติม รูปต่อไปนี้ให้แนวคิดโดยละเอียดเกี่ยวกับการจำแนกประเภทนี้
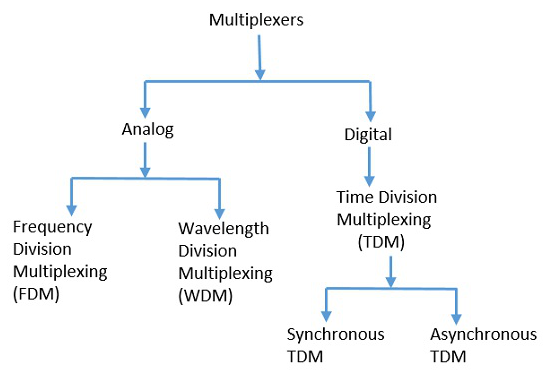
เทคนิคการมัลติเพล็กซ์มีหลายประเภท จากทั้งหมดนี้เรามีประเภทหลักที่มีการจำแนกประเภททั่วไปดังที่กล่าวถึงในรูปด้านบน ให้เราดูทีละรายการ
มัลติเพล็กซ์แบบอนาล็อก
เทคนิคการมัลติเพล็กซ์แบบอะนาล็อกเกี่ยวข้องกับสัญญาณที่มีลักษณะเป็นอนาล็อก สัญญาณแอนะล็อกถูกมัลติเพล็กซ์ตามความถี่ (FDM) หรือความยาวคลื่น (WDM)
Multiplexing กองความถี่
ในการมัลติเพล็กซ์แบบอะนาล็อกเทคนิคที่ใช้มากที่สุดคือ Frequency Division Multiplexing (FDM). เทคนิคนี้ใช้ความถี่ต่างๆเพื่อรวมสตรีมข้อมูลเพื่อส่งไปยังสื่อการสื่อสารเป็นสัญญาณเดียว
Example - เครื่องส่งโทรทัศน์แบบดั้งเดิมซึ่งส่งจำนวนช่องสัญญาณผ่านสายเคเบิลเส้นเดียวใช้ FDM
การมัลติเพล็กซ์หารความยาวคลื่น
การมัลติเพล็กซ์หารความยาวคลื่น (WDM) เป็นเทคนิคอะนาล็อกซึ่งกระแสข้อมูลจำนวนมากที่มีความยาวคลื่นต่างกันจะถูกส่งไปในสเปกตรัมของแสง ถ้าความยาวคลื่นเพิ่มขึ้นความถี่ของสัญญาณจะลดลง ปริซึมที่สามารถเปลี่ยนความยาวคลื่นที่แตกต่างกันให้เป็นเส้นเดียวสามารถใช้ที่เอาต์พุต MUX และอินพุตของ DEMUX
Example - การสื่อสารด้วยใยแก้วนำแสงใช้เทคนิค WDM เพื่อรวมความยาวคลื่นที่แตกต่างกันให้เป็นแสงเดียวสำหรับการสื่อสาร
Digital Multiplexing
คำว่าดิจิทัลหมายถึงบิตของข้อมูลที่ไม่ต่อเนื่อง ดังนั้นข้อมูลที่มีอยู่จึงอยู่ในรูปแบบของเฟรมหรือแพ็กเก็ตซึ่งไม่ต่อเนื่อง
การมัลติเพล็กซ์แบบแบ่งเวลา (TDM)
ใน TDM กรอบเวลาจะแบ่งออกเป็นช่วงเวลา เทคนิคนี้ใช้ในการส่งสัญญาณผ่านช่องทางการสื่อสารเดียวโดยการจัดสรรหนึ่งช่องสำหรับแต่ละข้อความ
TDM ทุกประเภทหลัก ๆ คือ TDM แบบซิงโครนัสและอะซิงโครนัส
TDM แบบซิงโครนัส
ใน Synchronous TDM อินพุตจะเชื่อมต่อกับเฟรม หากมีจำนวนการเชื่อมต่อ 'n' เฟรมจะถูกแบ่งออกเป็นช่วงเวลา 'n' มีการจัดสรรสล็อตหนึ่งช่องสำหรับแต่ละสายอินพุต
ในเทคนิคนี้อัตราการสุ่มตัวอย่างเป็นเรื่องปกติสำหรับสัญญาณทั้งหมดดังนั้นจึงได้รับอินพุตนาฬิกาเดียวกัน MUX จัดสรรsame slot ไปยังอุปกรณ์แต่ละเครื่องตลอดเวลา
TDM แบบอะซิงโครนัส
ใน Asynchronous TDM อัตราการสุ่มตัวอย่างจะแตกต่างกันสำหรับแต่ละสัญญาณและไม่จำเป็นต้องใช้นาฬิกาทั่วไป หากอุปกรณ์ที่กำหนดสำหรับช่วงเวลาไม่ส่งข้อมูลใด ๆ และไม่ได้ใช้งานช่องนั้นคือallotted to another อุปกรณ์ซึ่งแตกต่างจากซิงโครนัส
TDM ประเภทนี้ใช้ในเครือข่ายโหมดถ่ายโอนแบบอะซิงโครนัส
Demultiplexer
Demultiplexers ใช้เพื่อเชื่อมต่อแหล่งเดียวกับปลายทางหลายแห่ง กระบวนการนี้เป็นการย้อนกลับของการมัลติเพล็กซ์ ตามที่กล่าวไว้ก่อนหน้านี้ส่วนใหญ่จะใช้ที่เครื่องรับ DEMUX มีแอพพลิเคชั่นมากมาย ใช้ในเครื่องรับในระบบสื่อสาร ใช้ในหน่วยเลขคณิตและตรรกะในคอมพิวเตอร์เพื่อจ่ายพลังงานและส่งต่อการสื่อสาร ฯลฯ
Demultiplexers ใช้เป็นตัวแปลงอนุกรมถึงขนาน ข้อมูลอนุกรมจะได้รับเป็นอินพุตไปยัง DEMUX ในช่วงเวลาปกติและตัวนับจะติดอยู่เพื่อควบคุมเอาต์พุตของตัวแยกสัญญาณ
ทั้งเครื่องมัลติเพล็กเซอร์และเครื่องแยกสัญญาณมีบทบาทสำคัญในระบบการสื่อสารทั้งในส่วนเครื่องส่งและเครื่องรับ
การมัลติเพล็กซ์แบบแบ่งความถี่ใช้ในเครื่องรับวิทยุและโทรทัศน์ การใช้งานหลักของ FM คือการสื่อสารทางวิทยุ ให้เราดูโครงสร้างของเครื่องส่ง FM และเครื่องรับ FM พร้อมกับบล็อกไดอะแกรมและการทำงาน
เครื่องส่ง FM
เครื่องส่ง FM เป็นหน่วยทั้งหมดที่รับสัญญาณเสียงเป็นอินพุตและส่งคลื่นที่มอดูเลต FM ไปยังเสาอากาศเป็นเอาต์พุตที่จะส่ง เครื่องส่ง FM ประกอบด้วย 6 ขั้นตอนหลัก แสดงไว้ในรูปต่อไปนี้
การทำงานของเครื่องส่ง FM สามารถอธิบายได้ดังนี้
สัญญาณเสียงจากเอาต์พุตของไมโครโฟนจะถูกส่งไปยังเครื่องขยายเสียงล่วงหน้าซึ่งจะช่วยเพิ่มระดับของสัญญาณมอดูเลต
จากนั้นสัญญาณนี้จะถูกส่งผ่านไปยังตัวกรองความถี่สูงซึ่งทำหน้าที่เป็นเครือข่ายก่อนการเน้นเพื่อกรองสัญญาณรบกวนและปรับปรุงอัตราส่วนสัญญาณต่อเสียงรบกวน
สัญญาณนี้จะถูกส่งต่อไปยังวงจรโมดูเลเตอร์ FM
วงจรออสซิลเลเตอร์สร้างพาหะความถี่สูงซึ่งมอบให้กับโมดูเลเตอร์พร้อมกับสัญญาณมอดูเลต
ใช้ตัวคูณความถี่หลายขั้นตอนเพื่อเพิ่มความถี่ในการทำงาน ถึงกระนั้นพลังของสัญญาณก็ไม่เพียงพอที่จะส่ง ดังนั้นจึงใช้เพาเวอร์แอมป์ RF ที่ส่วนท้ายเพื่อเพิ่มพลังของสัญญาณมอดูเลต ในที่สุดเอาท์พุตแบบมอดูเลต FM นี้จะถูกส่งไปยังเสาอากาศเพื่อส่ง
ข้อกำหนดของผู้รับ
เครื่องรับวิทยุใช้เพื่อรับทั้งแถบ AM และสัญญาณย่านความถี่ FM การตรวจจับของAM ทำได้โดยวิธีการที่เรียกว่า as Envelope Detection และการตรวจจับ FM ทำได้โดยวิธีการที่เรียกว่า as Frequency Discrimination.
เครื่องรับวิทยุดังกล่าวมีข้อกำหนดดังต่อไปนี้
มันควรจะคุ้มค่า
ควรรับทั้งสัญญาณ AM และ FM
เครื่องรับควรสามารถปรับแต่งและขยายสถานีที่ต้องการได้
ควรมีความสามารถในการปฏิเสธสถานีที่ไม่ต้องการ
ต้องทำการ Demodulation กับสัญญาณสถานีทั้งหมดไม่ว่าความถี่ของพาหะคืออะไร
เพื่อให้บรรลุตามข้อกำหนดเหล่านี้วงจรจูนเนอร์และวงจรมิกเซอร์ควรมีประสิทธิภาพมาก ขั้นตอนของการผสม RF เป็นปรากฏการณ์ที่น่าสนใจ
การผสม RF
หน่วยผสม RF พัฒนาไฟล์ Intermediate Frequency (IF) ซึ่งจะแปลงสัญญาณที่ได้รับเพื่อประมวลผลสัญญาณอย่างมีประสิทธิภาพ
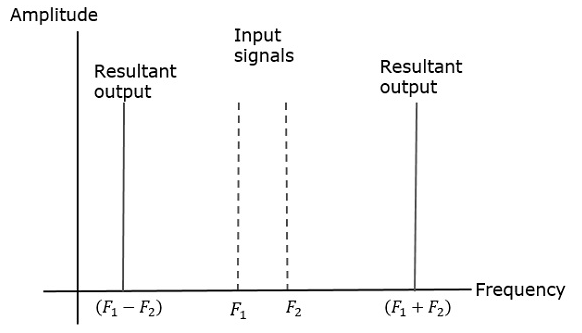
RF Mixer เป็นขั้นตอนสำคัญในเครื่องรับ สัญญาณสองสัญญาณที่มีความถี่ต่างกันจะถูกนำมาซึ่งระดับสัญญาณหนึ่งมีผลต่อระดับของสัญญาณอื่นเพื่อสร้างเอาต์พุตแบบผสมที่เป็นผลลัพธ์ สัญญาณอินพุตและเอาต์พุตมิกเซอร์ผลลัพธ์แสดงในรูปต่อไปนี้
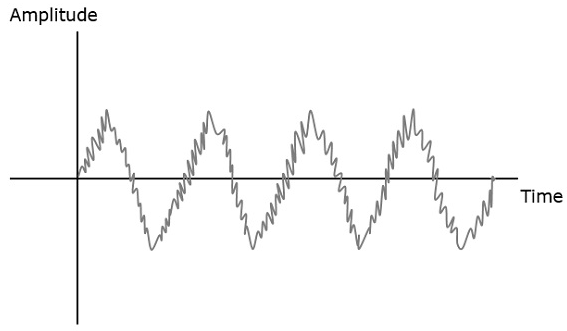
เมื่อสัญญาณสองสัญญาณเข้าสู่เครื่องผสม RF
ความถี่สัญญาณแรก = F1
ความถี่สัญญาณที่สอง = F2
จากนั้นความถี่สัญญาณผลลัพธ์ = (F1 + F2) และ (F1 - F2)
เครื่องผสมสัญญาณสองสัญญาณที่มีความถี่ต่างกันถูกสร้างขึ้นที่เอาต์พุต
หากสังเกตสิ่งนี้ในโดเมนความถี่รูปแบบจะมีลักษณะดังรูปต่อไปนี้
สัญลักษณ์ของเครื่องผสม RF มีลักษณะดังรูปต่อไปนี้
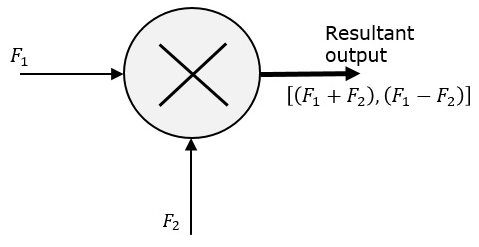
สัญญาณทั้งสองถูกผสมกันเพื่อสร้างสัญญาณผลลัพธ์โดยที่ผลของสัญญาณหนึ่งส่งผลต่อสัญญาณอื่นและทั้งสองจะสร้างรูปแบบที่แตกต่างกันดังที่เห็นก่อนหน้านี้
เครื่องรับ FM
เครื่องรับ FM เป็นหน่วยทั้งหมดที่รับสัญญาณมอดูเลตเป็นอินพุตและสร้างสัญญาณเสียงดั้งเดิมเป็นเอาต์พุต นักวิทยุสมัครเล่นเป็นเครื่องรับวิทยุเริ่มต้น อย่างไรก็ตามพวกเขามีข้อเสียเช่นความไวและการเลือกที่ไม่ดี
Selectivity คือการเลือกสัญญาณเฉพาะในขณะที่ปฏิเสธสัญญาณอื่น ๆ Sensitivity คือความสามารถในการตรวจจับสัญญาณ RF และถอดรหัสสัญญาณในขณะที่ระดับพลังงานต่ำสุด
เพื่อเอาชนะข้อบกพร่องเหล่านี้ super heterodyneเครื่องรับถูกคิดค้นขึ้น เครื่องรับ FM นี้ประกอบด้วย 5 ขั้นตอนหลัก ดังแสดงในรูปต่อไปนี้
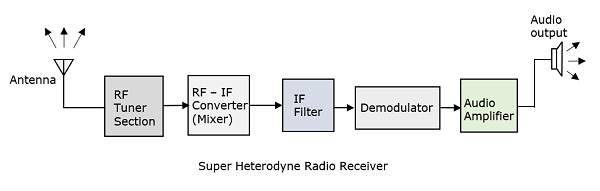
ส่วนจูนเนอร์ RF
สัญญาณมอดูเลตที่ได้รับจากเสาอากาศจะถูกส่งไปยังไฟล์ tuner circuitผ่านหม้อแปลง วงจรจูนเนอร์เป็นเพียงวงจร LC ซึ่งเรียกอีกอย่างว่าresonant หรือ tank circuit. เลือกความถี่ที่เครื่องรับวิทยุต้องการ นอกจากนี้ยังปรับแต่งออสซิลเลเตอร์ท้องถิ่นและฟิลเตอร์ RF ในเวลาเดียวกัน
เครื่องผสม RF
สัญญาณจากเอาต์พุตจูนเนอร์จะถูกกำหนดให้กับ RF-IF converterซึ่งทำหน้าที่เป็นเครื่องผสม มีออสซิลเลเตอร์ท้องถิ่นซึ่งสร้างความถี่คงที่ ขั้นตอนการผสมจะทำที่นี่โดยมีสัญญาณที่ได้รับเป็นอินพุตหนึ่งและความถี่ของออสซิลเลเตอร์ท้องถิ่นเป็นอินพุตอื่น ผลลัพธ์ที่ได้คือส่วนผสมของสองความถี่ [(f 1 + f 2 ), (f 1 - f 2 )] ที่ผลิตโดยเครื่องผสมซึ่งเรียกว่าIntermediate Frequency (IF).
การผลิต IF ช่วยในการ demodulation ของสัญญาณสถานีใด ๆ ที่มีความถี่พาหะ ดังนั้นสัญญาณทั้งหมดจะถูกแปลเป็นความถี่พาหะคงที่เพื่อการเลือกที่เพียงพอ
ถ้ากรอง
ตัวกรองความถี่ระดับกลางคือตัวกรองแบนด์พาสซึ่งส่งผ่านความถี่ที่ต้องการ จะกำจัดส่วนประกอบที่มีความถี่สูงกว่าที่ไม่ต้องการที่มีอยู่รวมทั้งเสียงรบกวน ตัวกรอง IF ช่วยในการปรับปรุงSignal to Noise Ratio (SNR).
Demodulator
ตอนนี้สัญญาณมอดูเลตที่ได้รับจะถูก demodulated ด้วยกระบวนการเดียวกับที่ใช้ที่ด้านเครื่องส่งสัญญาณ โดยทั่วไปจะใช้การแยกแยะความถี่สำหรับการตรวจจับ FM
เครื่องขยายเสียง
นี่คือขั้นตอนของเครื่องขยายเสียงที่ใช้ในการขยายสัญญาณเสียงที่ตรวจพบ สัญญาณที่ประมวลผลจะได้รับความแรงเพื่อให้มีประสิทธิภาพ สัญญาณนี้จะถูกส่งต่อไปยังลำโพงเพื่อรับสัญญาณเสียงต้นฉบับ
ตัวรับสัญญาณ super heterodyne นี้ใช้กันได้ดีเนื่องจากข้อดีเช่น SNR ที่ดีกว่าความไวและการเลือก
เสียงรบกวนใน FM
การมีสัญญาณรบกวนเป็นปัญหาใน FM เช่นกัน เมื่อใดก็ตามที่สัญญาณรบกวนที่รุนแรงซึ่งมีความถี่ใกล้เคียงกับสัญญาณที่ต้องการมาถึงเครื่องรับจะล็อคสัญญาณรบกวนนั้น ปรากฏการณ์ดังกล่าวเรียกว่าCapture effect.
ในการเพิ่ม SNR ที่ความถี่มอดูเลตที่สูงขึ้นเรียกว่าวงจร high pass preemphasisใช้ที่เครื่องส่งสัญญาณ อีกวงจรเรียกว่าde-emphasisกระบวนการผกผันของการเน้นล่วงหน้าถูกใช้ที่เครื่องรับซึ่งเป็นวงจร low pass วงจร preemphasis และ de-focus ถูกใช้กันอย่างแพร่หลายในเครื่องส่งและตัวรับสัญญาณ FM เพื่อเพิ่ม SNR เอาท์พุทอย่างมีประสิทธิภาพ
จนถึงตอนนี้เราได้พูดคุยเกี่ยวกับการมอดูเลตคลื่นต่อเนื่อง ตอนนี้ถึงเวลาสำหรับสัญญาณที่ไม่ต่อเนื่อง Pulse modulationเทคนิคที่เกี่ยวข้องกับสัญญาณที่ไม่ต่อเนื่อง ให้เราดูวิธีการแปลงสัญญาณต่อเนื่องเป็นสัญญาณที่ไม่ต่อเนื่อง กระบวนการที่เรียกว่าการสุ่มตัวอย่างช่วยเราในเรื่องนี้
การสุ่มตัวอย่าง
กระบวนการแปลงสัญญาณเวลาต่อเนื่องเป็นสัญญาณเวลาไม่ต่อเนื่องเทียบเท่าสามารถเรียกได้ว่า Sampling. ข้อมูลบางส่วนจะถูกสุ่มตัวอย่างอย่างต่อเนื่องในกระบวนการสุ่มตัวอย่าง
รูปต่อไปนี้แสดงสัญญาณเวลาต่อเนื่อง x(t) และสัญญาณตัวอย่าง xs(t). เมื่อไหร่x(t) คูณด้วยรถไฟอิมพัลส์เป็นระยะซึ่งเป็นสัญญาณตัวอย่าง xs(t) จะได้รับ
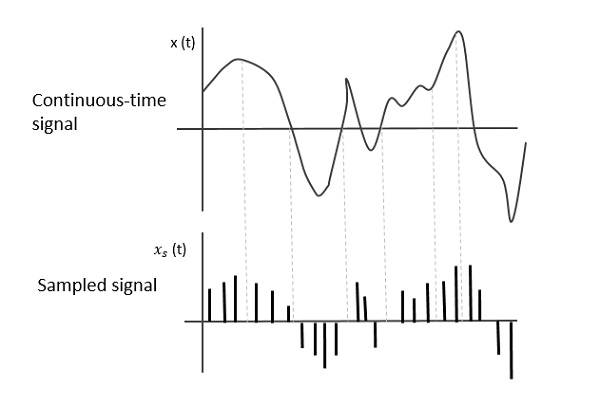
ก sampling signal เป็นรถไฟพัลส์เป็นระยะโดยมี unit amplitudeสุ่มตัวอย่างในช่วงเวลาที่เท่ากัน Tsซึ่งเรียกว่า Sampling time. ข้อมูลนี้จะถูกส่งในเวลาที่อินสแตนซ์Ts และสัญญาณของผู้ให้บริการจะถูกส่งในเวลาที่เหลือ
อัตราการสุ่มตัวอย่าง
ในการแยกแยะสัญญาณควรแก้ไขช่องว่างระหว่างตัวอย่าง ช่องว่างนั้นสามารถเรียกได้ว่าเป็นsampling period Ts.
$$ การสุ่มตัวอย่าง \: ความถี่ = \ frac {1} {T_s} = f_s $$
ที่ไหน
Ts = เวลาในการสุ่มตัวอย่าง
fs = ความถี่ในการสุ่มตัวอย่างหรืออัตราการสุ่มตัวอย่าง
ทฤษฎีบทการสุ่มตัวอย่าง
ในขณะที่พิจารณาอัตราการสุ่มตัวอย่างควรพิจารณาประเด็นสำคัญเกี่ยวกับอัตราที่ต้องมี rate of sampling ควรเป็นเช่นนั้นเพื่อไม่ให้ข้อมูลในสัญญาณข้อความสูญหายและไม่ควรถูกทับ
sampling theorem ระบุว่า“ สัญญาณสามารถทำซ้ำได้อย่างแน่นอนหากมีการสุ่มตัวอย่างในอัตรา fs ซึ่งมากกว่าหรือเท่ากับสองเท่าของความถี่สูงสุด W. ”
หากต้องการพูดให้เข้าใจง่ายขึ้นเพื่อให้การสร้างสัญญาณต้นฉบับมีประสิทธิภาพอัตราการสุ่มตัวอย่างควรเป็นสองเท่าของความถี่สูงสุด
ซึ่งหมายความว่า,
$$ f_s \ geq 2W $$
ที่ไหน
fs = ความถี่ในการสุ่มตัวอย่าง
W คือความถี่สูงสุด
อัตราการสุ่มตัวอย่างนี้เรียกว่า Nyquist rate.
ทฤษฎีบทการสุ่มตัวอย่างซึ่งเรียกอีกอย่างว่า Nyquist theoremนำเสนอทฤษฎีอัตราตัวอย่างที่เพียงพอในแง่ของแบนด์วิดท์สำหรับคลาสของฟังก์ชันที่ จำกัด แบนด์วิดท์
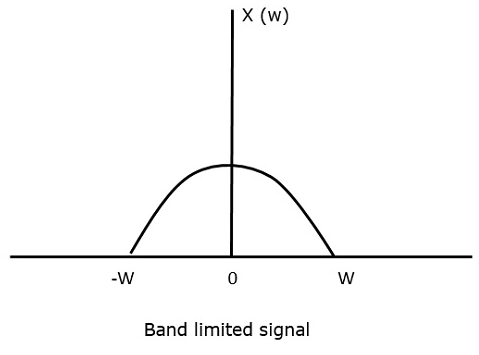
สำหรับสัญญาณเวลาต่อเนื่อง x(t)สัญญาณ จำกัด แบนด์ในโดเมนความถี่สามารถแสดงได้ดังแสดงในรูปต่อไปนี้
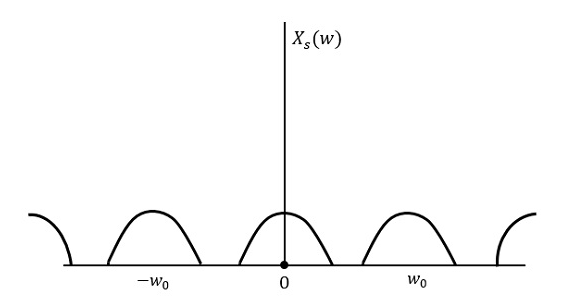
หากสัญญาณถูกสุ่มตัวอย่างสูงกว่าอัตรา Nyquist สัญญาณเดิมจะสามารถกู้คืนได้ รูปต่อไปนี้อธิบายสัญญาณหากสุ่มตัวอย่างด้วยอัตราที่สูงกว่า 2w ในโดเมนความถี่
หากสัญญาณเดียวกันถูกสุ่มตัวอย่างในอัตราที่น้อยกว่า 2w สัญญาณตัวอย่างจะมีลักษณะดังรูปต่อไปนี้
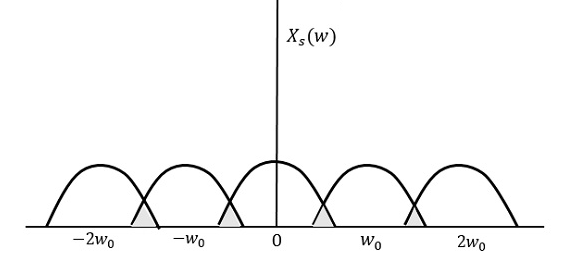
เราสามารถสังเกตได้จากรูปแบบข้างต้นว่ามีการทำข้อมูลมากเกินไปซึ่งนำไปสู่การปะปนและการสูญเสียข้อมูล ปรากฏการณ์ที่ไม่ต้องการของการทับซ้อนนี้เรียกว่าAliasing.
การใช้นามแฝงสามารถเรียกได้ว่าเป็น“ ปรากฏการณ์ของส่วนประกอบความถี่สูงในสเปกตรัมของสัญญาณโดยคำนึงถึงตัวตนของส่วนประกอบความถี่ต่ำในสเปกตรัมของเวอร์ชันตัวอย่าง”
ดังนั้นการสุ่มตัวอย่างของสัญญาณจึงถูกเลือกให้อยู่ในอัตรา Nyquist ตามที่ระบุไว้ในทฤษฎีบทการสุ่มตัวอย่าง หากอัตราการสุ่มตัวอย่างเท่ากับสองเท่าของความถี่สูงสุด (2W)
นั่นหมายความว่า,
$$ f_s = 2W $$
ที่ไหน
fs = ความถี่ในการสุ่มตัวอย่าง
W คือความถี่สูงสุด

ผลลัพธ์จะเป็นดังที่แสดงในรูปด้านบน ข้อมูลจะถูกแทนที่โดยไม่มีการสูญเสียใด ๆ ดังนั้นนี่จึงเป็นอัตราการสุ่มตัวอย่างที่ดี
หลังจากการมอดูเลตคลื่นต่อเนื่องส่วนถัดไปคือการมอดูเลตแบบพัลส์ การมอดูเลตพัลส์ยังแบ่งออกเป็นการมอดูเลตแบบอนาล็อกและดิจิตอล เทคนิคการมอดูเลตแบบอะนาล็อกส่วนใหญ่แบ่งออกเป็น Pulse Amplitude Modulation, Pulse Duration Modulation / Pulse Width Modulation และ Pulse Position Modulation
Pulse Amplitude Modulation
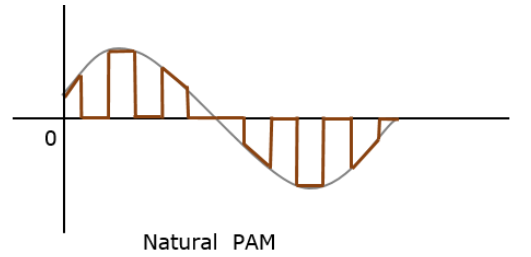
Pulse Amplitude Modulation (PAM) เป็นรูปแบบการมอดูเลตแบบอะนาล็อกซึ่งแอมพลิจูดของพัลส์พาหะแปรผันตามสัดส่วนกับแอมพลิจูดของสัญญาณข้อความในทันที
สัญญาณมอดูเลตแอมพลิจูดพัลส์จะเป็นไปตามแอมพลิจูดของสัญญาณเดิมเนื่องจากสัญญาณจะติดตามเส้นทางของคลื่นทั้งหมด ใน PAM ตามธรรมชาติสัญญาณที่สุ่มตัวอย่างด้วยอัตรา Nyquist จะถูกสร้างขึ้นใหม่โดยส่งผ่านสัญญาณที่มีประสิทธิภาพLow Pass Frequency (LPF) ด้วยความถี่ตัดที่แน่นอน
ตัวเลขต่อไปนี้อธิบายการมอดูเลต Pulse Amplitude
แม้ว่าสัญญาณ PAM จะถูกส่งผ่าน LPF แต่ก็ไม่สามารถกู้คืนสัญญาณได้โดยไม่ผิดเพี้ยน ดังนั้นเพื่อหลีกเลี่ยงเสียงรบกวนนี้ให้ทำการสุ่มตัวอย่างแบบแบนด้านบนดังแสดงในรูปต่อไปนี้
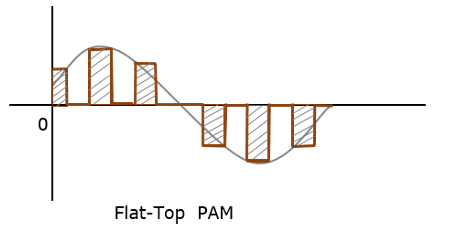
Flat-top samplingเป็นกระบวนการที่สัญญาณตัวอย่างสามารถแสดงเป็นพัลส์ซึ่งความกว้างของสัญญาณไม่สามารถเปลี่ยนแปลงได้เมื่อเทียบกับสัญญาณแอนะล็อกที่จะสุ่มตัวอย่าง ส่วนบนของแอมพลิจูดยังคงแบน กระบวนการนี้ช่วยลดความยุ่งยากในการออกแบบวงจร
การมอดูเลตความกว้างพัลส์
Pulse Width Modulation (PWM) หรือ Pulse Duration Modulation (PDM) หรือ Pulse Time Modulation (PTM) เป็นรูปแบบการมอดูเลตแบบอะนาล็อกซึ่งระยะเวลาหรือความกว้างหรือเวลาของพัลส์พาหะแตกต่างกันไปตามสัดส่วนกับแอมพลิจูดของสัญญาณข้อความในทันที
ความกว้างของพัลส์จะแตกต่างกันไปในวิธีนี้ แต่ความกว้างของสัญญาณยังคงที่ ตัว จำกัด แอมพลิจูดใช้เพื่อทำให้แอมพลิจูดของสัญญาณคงที่ วงจรเหล่านี้ตัดความกว้างไปยังระดับที่ต้องการและด้วยเหตุนี้สัญญาณรบกวนจึงถูก จำกัด
รูปต่อไปนี้อธิบายประเภทของการปรับความกว้างพัลส์

PWM มีสามรูปแบบ พวกเขาคือ -
ขอบนำของพัลส์คงที่ขอบต่อท้ายแตกต่างกันไปตามสัญญาณข้อความ
ขอบด้านท้ายของพัลส์คงที่ขอบนำจะแตกต่างกันไปตามสัญญาณข้อความ
จุดศูนย์กลางของพัลส์คงที่ขอบนำและขอบด้านท้ายแตกต่างกันไปตามสัญญาณข้อความ
ทั้งสามประเภทนี้แสดงในรูปที่กำหนดด้านบนพร้อมช่องเวลา
การปรับตำแหน่งพัลส์
Pulse Position Modulation (PPM) เป็นรูปแบบการมอดูเลตแบบอะนาล็อกซึ่งแอมพลิจูดและความกว้างของพัลส์จะคงที่ในขณะที่ตำแหน่งของพัลส์แต่ละอันโดยอ้างอิงตำแหน่งของพัลส์อ้างอิงจะแตกต่างกันไปตามค่าตัวอย่างทันทีของสัญญาณข้อความ
เครื่องส่งต้องส่งพัลส์ซิงโครไนซ์ (หรือเพียงแค่ซิงค์พัลส์) เพื่อให้เครื่องส่งและตัวรับอยู่ในการซิงโครไนซ์ พัลส์ซิงค์เหล่านี้ช่วยรักษาตำแหน่งของพัลส์ ตัวเลขต่อไปนี้อธิบายการมอดูเลตตำแหน่งพัลส์
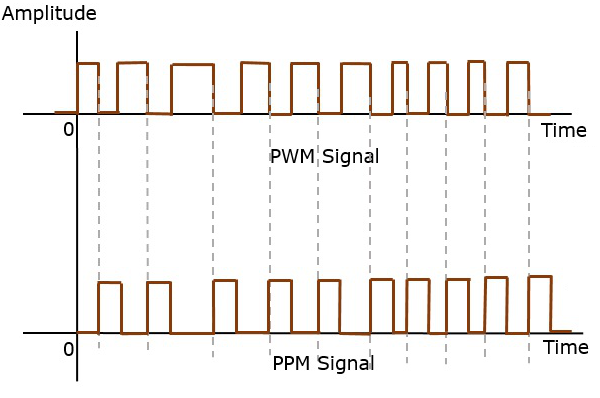
การมอดูเลตตำแหน่งพัลส์จะทำตามสัญญาณมอดูเลตความกว้างพัลส์ การต่อท้ายของสัญญาณมอดูเลตความกว้างพัลส์จะกลายเป็นจุดเริ่มต้นของพัลส์ในสัญญาณ PPM ดังนั้นตำแหน่งของพัลส์เหล่านี้จึงเป็นสัดส่วนกับความกว้างของพัลส์ PWM
ความได้เปรียบ
เนื่องจากแอมพลิจูดและความกว้างคงที่พลังงานที่จัดการก็จะคงที่เช่นกัน
เสียเปรียบ
การซิงโครไนซ์ระหว่างเครื่องส่งและเครื่องรับเป็นสิ่งที่จำเป็น
เปรียบเทียบระหว่าง PAM, PWM และ PPM
การเปรียบเทียบระหว่างกระบวนการมอดูเลตข้างต้นแสดงอยู่ในตารางเดียว
| PAM | PWM | พีพีเอ็ม |
|---|---|---|
| แอมพลิจูดมีหลากหลาย | ความกว้างมีหลากหลาย | ตำแหน่งมีหลากหลาย |
| แบนด์วิดท์ขึ้นอยู่กับความกว้างของพัลส์ | แบนด์วิดท์ขึ้นอยู่กับเวลาที่เพิ่มขึ้นของพัลส์ | แบนด์วิดท์ขึ้นอยู่กับเวลาที่เพิ่มขึ้นของพัลส์ |
| กำลังส่งสัญญาณทันทีจะแปรผันตามความกว้างของพัลส์ | กำลังส่งสัญญาณทันทีจะแตกต่างกันไปตามแอมพลิจูดและความกว้างของพัลส์ | กำลังของเครื่องส่งสัญญาณทันทีจะคงที่ตามความกว้างของพัลส์ |
| ความซับซ้อนของระบบสูง | ความซับซ้อนของระบบอยู่ในระดับต่ำ | ความซับซ้อนของระบบอยู่ในระดับต่ำ |
| สัญญาณรบกวนสูง | สัญญาณรบกวนต่ำ | สัญญาณรบกวนต่ำ |
| มันคล้ายกับการมอดูเลตแอมพลิจูด | มันคล้ายกับการมอดูเลตความถี่ | มันคล้ายกับการมอดูเลตเฟส |
จนถึงตอนนี้เราได้ใช้เทคนิคการมอดูเลตต่างๆ สิ่งที่เหลืออยู่คือdigital modulationซึ่งอยู่ภายใต้การจำแนกประเภทของการมอดูเลตชีพจร การมอดูเลตแบบดิจิทัลมี Pulse Code Modulation (PCM) เป็นหลักในการจำแนกประเภท นอกจากนี้ยังได้รับการประมวลผลเป็นเดลต้ามอดูเลตและ ADM
การปรับรหัสพัลส์
สัญญาณคือ Pulse Code ที่มอดูเลตเพื่อแปลงข้อมูลแอนะล็อกเป็นลำดับไบนารีเช่น 1s และ 0s ผลลัพธ์ของไฟล์Pulse Code Modulation (PCM)จะคล้ายกับลำดับไบนารี รูปต่อไปนี้แสดงตัวอย่างของเอาต์พุต PCM ที่เกี่ยวข้องกับค่าทันทีของคลื่นไซน์ที่กำหนด
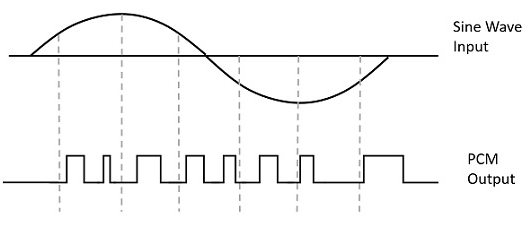
แทนที่จะเป็นรถไฟแบบพัลส์ PCM จะสร้างชุดตัวเลขหรือตัวเลขดังนั้นกระบวนการนี้จึงเรียกว่าดิจิทัล ตัวเลขเหล่านี้แต่ละหลักแม้ว่าจะอยู่ในรหัสไบนารี แต่จะแสดงถึงแอมพลิจูดโดยประมาณของตัวอย่างสัญญาณในช่วงเวลานั้น
ใน Pulse Code Modulation สัญญาณข้อความจะแสดงโดยลำดับของพัลส์ที่เข้ารหัส สัญญาณข้อความนี้ทำได้โดยการแสดงสัญญาณในรูปแบบไม่ต่อเนื่องทั้งในด้านเวลาและแอมพลิจูด
องค์ประกอบพื้นฐานของ PCM
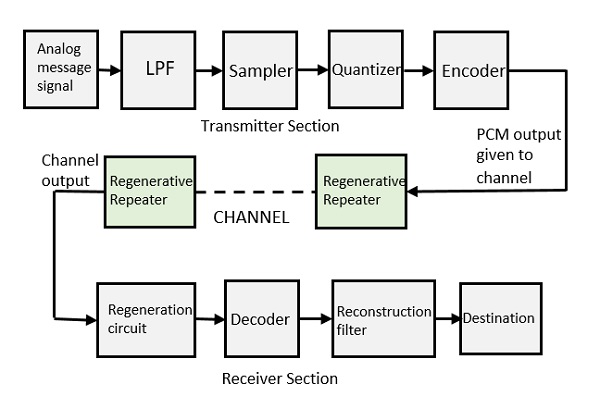
ส่วนเครื่องส่งสัญญาณของวงจร Pulse Code Modulator ประกอบด้วย Sampling, Quantizing และ Encodingซึ่งดำเนินการในไฟล์ analog-to-digital converterมาตรา. ตัวกรองความถี่ต่ำก่อนการสุ่มตัวอย่างจะป้องกันไม่ให้มีนามแฝงของสัญญาณข้อความ
การใช้งานพื้นฐานในส่วนเครื่องรับคือ regeneration of impaired signals, decoding, และ reconstructionของรถไฟชีพจรเชิงปริมาณ รูปต่อไปนี้คือแผนภาพบล็อกของ PCM ซึ่งแสดงถึงองค์ประกอบพื้นฐานของทั้งส่วนเครื่องส่งและส่วนรับ
ตัวกรองความถี่ต่ำ (LPF)
ตัวกรองนี้จะกำจัดส่วนประกอบความถี่สูงที่มีอยู่ในสัญญาณอนาล็อกอินพุตซึ่งมากกว่าความถี่สูงสุดของสัญญาณข้อความเพื่อหลีกเลี่ยงการกำหนดนามแฝงของสัญญาณข้อความ
ตัวอย่าง
นี่คือวงจรที่ใช้เทคนิคที่ช่วยในการรวบรวมข้อมูลตัวอย่างด้วยค่าทันทีของสัญญาณข้อความเพื่อสร้างสัญญาณดั้งเดิมขึ้นมาใหม่ อัตราการสุ่มตัวอย่างต้องมากกว่าสองเท่าขององค์ประกอบความถี่สูงสุดW ของสัญญาณข้อความตามทฤษฎีบทการสุ่มตัวอย่าง
Quantizer
Quantizing เป็นกระบวนการลดจำนวนบิตที่มากเกินไปและ จำกัด ข้อมูล เอาต์พุตตัวอย่างเมื่อกำหนดให้กับ Quantizer จะลดบิตที่ซ้ำซ้อนและบีบอัดค่า
ตัวเข้ารหัส
การแปลงสัญญาณอนาล็อกเป็นดิจิทัลทำได้โดยตัวเข้ารหัส กำหนดแต่ละระดับเชิงปริมาณด้วยรหัสไบนารี การสุ่มตัวอย่างที่ทำที่นี่เป็นกระบวนการเก็บตัวอย่าง ทั้งสามส่วนนี้จะทำหน้าที่เป็นตัวแปลงอนาล็อกเป็นดิจิตอล การเข้ารหัสช่วยลดแบนด์วิดท์ที่ใช้
รีเจนเนอเรเตอร์รีพีทเตอร์
เอาต์พุตของช่องสัญญาณมีวงจรรีเจนเนอเรเตอร์รีเจนเนอเรเตอร์หนึ่งวงจรเพื่อชดเชยการสูญเสียสัญญาณและสร้างสัญญาณขึ้นใหม่ นอกจากนี้ยังเพิ่มความแรงของสัญญาณ
ตัวถอดรหัส
วงจรถอดรหัสจะถอดรหัสรูปแบบสัญญาณพัลส์โค้ดเพื่อสร้างสัญญาณต้นฉบับ วงจรนี้ทำหน้าที่เป็นdemodulator.
ตัวกรองการสร้างใหม่
หลังจากการแปลงดิจิตอลเป็นอนาล็อกเสร็จสิ้นโดยวงจรรีเจนเนอเรเตอร์และตัวถอดรหัสจะมีการใช้ตัวกรองความถี่ต่ำเรียกว่าตัวกรองการสร้างใหม่เพื่อรับสัญญาณเดิมกลับมา
ดังนั้นวงจร Pulse Code Modulator จะแปลงสัญญาณแอนะล็อกที่กำหนดให้เป็นดิจิทัลรหัสและสุ่มตัวอย่าง จากนั้นส่งสัญญาณในรูปแบบอะนาล็อก กระบวนการทั้งหมดนี้ทำซ้ำในรูปแบบย้อนกลับเพื่อให้ได้สัญญาณดั้งเดิม
มีเทคนิคการมอดูเลตเล็กน้อยที่ใช้ในการสร้างสัญญาณ PCM เทคนิคเหล่านี้เช่นsampling, quantization, และ companding ช่วยในการสร้างสัญญาณ PCM ที่มีประสิทธิภาพซึ่งสามารถสร้างสัญญาณต้นฉบับได้อย่างแน่นอน
Quantization
การแปลงสัญญาณอนาล็อกเป็นดิจิทัลเกี่ยวข้องกับการปัดเศษของค่าซึ่งมีค่าเท่ากับค่าอนาล็อกโดยประมาณ วิธีการสุ่มตัวอย่างจะเลือกจุดสองสามจุดบนสัญญาณแอนะล็อกจากนั้นจุดเหล่านี้จะถูกรวมเข้าด้วยกันเพื่อปัดเศษค่าออกเป็นค่าที่ใกล้เสถียร กระบวนการดังกล่าวเรียกว่าQuantization.
การหาปริมาณของสัญญาณแอนะล็อกทำได้โดยการแยกแยะสัญญาณด้วยระดับการหาปริมาณ Quantization คือการแสดงค่าตัวอย่างของแอมพลิจูดด้วยชุดระดับที่ จำกัด ซึ่งหมายถึงการแปลง acontinuous-amplitude sample เป็น discrete-time signal.
รูปต่อไปนี้แสดงให้เห็นว่าสัญญาณอนาล็อกได้รับการวัดปริมาณอย่างไร เส้นสีน้ำเงินแสดงถึงสัญญาณแอนะล็อกในขณะที่เส้นสีแดงแสดงถึงสัญญาณเชิงปริมาณ
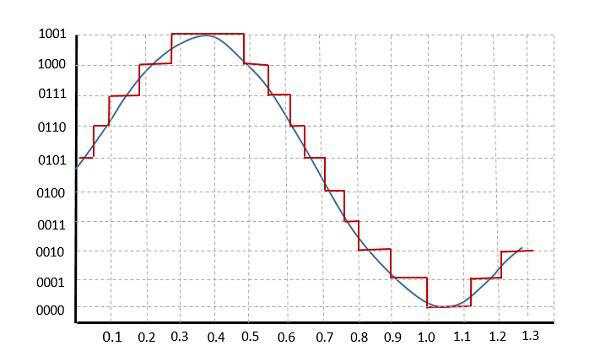
ทั้งการสุ่มตัวอย่างและการหาปริมาณทำให้ข้อมูลสูญหาย คุณภาพของเอาต์พุต Quantizer ขึ้นอยู่กับจำนวนระดับการหาปริมาณที่ใช้ แอมพลิจูดที่ไม่ต่อเนื่องของเอาต์พุตเชิงปริมาณเรียกว่าเป็นrepresentation levels หรือ reconstruction levels. ระยะห่างระหว่างระดับการแสดงที่อยู่ติดกันสองระดับเรียกว่า aquantum หรือ step-size.
การทำงานร่วมกันใน PCM
คำ Companding เป็นการรวมกันของ Comกดและ Expandingซึ่งหมายความว่ามันทำได้ทั้งสองอย่าง นี่เป็นเทคนิคที่ไม่เป็นเชิงเส้นที่ใช้ใน PCM ซึ่งบีบอัดข้อมูลที่เครื่องส่งและขยายข้อมูลเดียวกันที่เครื่องรับ ผลกระทบของเสียงรบกวนและ crosstalk จะลดลงโดยใช้เทคนิคนี้
เทคนิค Companding มีสองประเภท
เทคนิคการปฏิบัติตามกฎหมาย
การหาปริมาณสม่ำเสมอทำได้ที่ A = 1โดยที่เส้นโค้งลักษณะเป็นเส้นตรงและไม่มีการบีบอัด
A-law มีขึ้นกลางที่จุดกำเนิด ดังนั้นจึงมีค่าที่ไม่ใช่ศูนย์
A-law companding ใช้สำหรับระบบโทรศัพท์ PCM
กฎหมายถูกใช้ในหลายส่วนของโลก
เทคนิคการปฏิบัติตามกฎหมาย
การหาปริมาณสม่ำเสมอทำได้ที่ µ = 0โดยที่เส้นโค้งลักษณะเป็นเส้นตรงและไม่มีการบีบอัด
µ-law มีดอกยางกลางที่จุดกำเนิด ดังนั้นจึงมีค่าเป็นศูนย์
comp-law companding ใช้สำหรับสัญญาณเสียงพูดและเพลง
-law ใช้ในอเมริกาเหนือและญี่ปุ่น
PCM ที่แตกต่างกัน
ตัวอย่างที่มีความสัมพันธ์กันอย่างมากเมื่อเข้ารหัสโดยเทคนิค PCM จะทิ้งข้อมูลที่ซ้ำซ้อนไว้เบื้องหลัง ในการประมวลผลข้อมูลที่ซ้ำซ้อนนี้และเพื่อให้ได้ผลลัพธ์ที่ดีขึ้นจึงเป็นการตัดสินใจที่ชาญฉลาดที่จะใช้ค่าตัวอย่างที่คาดการณ์โดยสันนิษฐานจากผลลัพธ์ก่อนหน้านี้และสรุปด้วยค่าเชิงปริมาณ
กระบวนการดังกล่าวมีชื่อว่า Differential PCM เทคนิค.
อัตราการสุ่มตัวอย่างของสัญญาณควรสูงกว่าอัตรา Nyquist เพื่อให้ได้การสุ่มตัวอย่างที่ดีขึ้น หากช่วงเวลาการสุ่มตัวอย่างใน Differential PCM (DPCM) ลดลงมากความแตกต่างของแอมพลิจูดระหว่างตัวอย่างต่อตัวอย่างจะน้อยมากราวกับว่าความแตกต่างนั้น1-bit quantizationจากนั้นขนาดขั้นตอนจะเล็กมากเช่น Δ (เดลต้า).
Delta Modulation คืออะไร?
ประเภทของการมอดูเลตที่อัตราการสุ่มตัวอย่างสูงกว่ามากและขนาดขั้นตอนหลังการหาปริมาณมีค่าน้อยกว่า Δการมอดูเลตดังกล่าวเรียกว่า delta modulation.
คุณสมบัติของ Delta Modulation
อินพุตที่สุ่มตัวอย่างมากเกินไปจะถูกนำไปใช้ประโยชน์จากความสัมพันธ์ของสัญญาณอย่างเต็มที่
การออกแบบปริมาณนั้นเรียบง่าย
ลำดับการป้อนข้อมูลสูงกว่าอัตรา Nyquist มาก
คุณภาพอยู่ในระดับปานกลาง
การออกแบบโมดูเลเตอร์และเดโมดูเลเตอร์นั้นเรียบง่าย
การประมาณแบบขั้นบันไดของรูปคลื่นเอาท์พุต
ขนาดขั้นบันไดมีขนาดเล็กมากกล่าวคือ Δ (เดลต้า).
ผู้ใช้สามารถกำหนดอัตราบิตได้
ต้องใช้งานที่ง่ายกว่า
Delta Modulation เป็นรูปแบบที่เรียบง่ายของเทคนิค DPCM ซึ่งมองว่าเป็นโครงร่าง DPCM 1 บิต เมื่อช่วงการสุ่มตัวอย่างลดลงความสัมพันธ์ของสัญญาณจะสูงขึ้น
เดลต้าโมดูเลเตอร์
Delta Modulatorประกอบด้วยควอนไทเซอร์ 1 บิตและวงจรหน่วงเวลาพร้อมกับวงจรฤดูร้อนสองวงจร ต่อไปนี้เป็นแผนภาพบล็อกของโมดูเลเตอร์เดลต้า
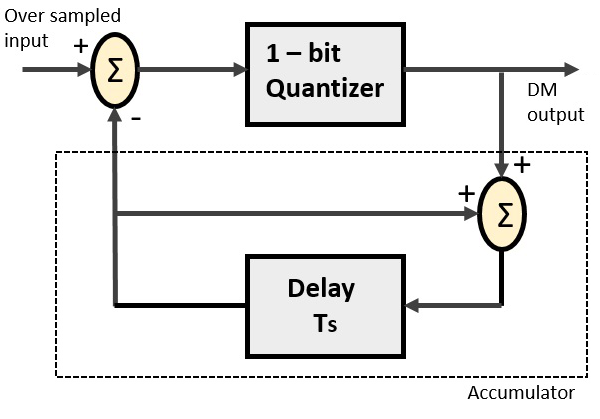
รูปคลื่นโดยประมาณของบันไดกรณีจะเป็นเอาต์พุตของเดลต้าโมดูเลเตอร์ที่มีขนาดขั้นตอนเป็นเดลต้า (Δ). คุณภาพเอาต์พุตของรูปคลื่นอยู่ในระดับปานกลาง
Delta Demodulator
เดโมดูเลเตอร์เดลต้าประกอบด้วยตัวกรองความถี่ต่ำฤดูร้อนและวงจรหน่วงเวลา วงจรทำนายจะถูกตัดออกที่นี่และด้วยเหตุนี้จึงไม่มีการป้อนข้อมูลที่สันนิษฐานให้กับเครื่องถอดรหัส
ต่อไปนี้เป็นแผนภาพบล็อกสำหรับเดโมดูเลเตอร์เดลต้า

ตัวกรองความถี่ต่ำถูกนำมาใช้ด้วยเหตุผลหลายประการ แต่สิ่งที่โดดเด่นคือการกำจัดสัญญาณรบกวนสำหรับสัญญาณนอกย่านความถี่ ข้อผิดพลาดขนาดขั้นตอนที่อาจเกิดขึ้นที่เครื่องส่งสัญญาณเรียกว่าgranular noiseซึ่งถูกกำจัดที่นี่ หากไม่มีสัญญาณรบกวนเอาต์พุตของโมดูเลเตอร์จะเท่ากับอินพุตเดโมดูเลเตอร์
ข้อดีของ DM มากกว่า DPCM
- Quantizer 1 บิต
- การออกแบบโมดูเลเตอร์และเดโมดูเลเตอร์ที่ง่ายมาก
อย่างไรก็ตามมีอยู่บ้าง noise in DM และประเภทของเสียงดังต่อไปนี้
- ความผิดเพี้ยนของโหลดเกินความลาดชัน (เมื่อΔมีขนาดเล็ก)
- สัญญาณรบกวนแบบละเอียด (เมื่อΔมีขนาดใหญ่)
Adaptive Delta Modulation
ในการมอดูเลตแบบดิจิทัลเราพบปัญหาบางอย่างในการกำหนดขนาดขั้นตอนซึ่งมีผลต่อคุณภาพของคลื่นเอาท์พุต
จำเป็นต้องมีขนาดขั้นบันไดที่ใหญ่ขึ้นในความชันของสัญญาณมอดูเลตและจำเป็นต้องมีขนาดขั้นบันไดที่เล็กลงซึ่งข้อความมีความลาดเอียงเล็กน้อย ส่งผลให้พลาดรายละเอียดนาทีไป ดังนั้นจะเป็นการดีกว่าหากเราสามารถควบคุมการปรับขนาดขั้นตอนตามความต้องการของเราเพื่อให้ได้การสุ่มตัวอย่างตามแบบที่ต้องการ นี่คือแนวคิดของAdaptive Delta Modulation (ADM).
Digital Modulation ให้ความจุข้อมูลมากขึ้นความปลอดภัยของข้อมูลสูงความพร้อมใช้งานของระบบที่รวดเร็วขึ้นพร้อมการสื่อสารที่มีคุณภาพดีเยี่ยม ดังนั้นเทคนิคการมอดูเลตแบบดิจิทัลจึงมีความต้องการมากขึ้นสำหรับความสามารถในการถ่ายทอดข้อมูลจำนวนมากขึ้นกว่าแบบอะนาล็อก
เทคนิคการมอดูเลตแบบดิจิทัลมีหลายประเภทและเรายังสามารถใช้เทคนิคเหล่านี้ร่วมกันได้อีกด้วย ในบทนี้เราจะพูดถึงเทคนิคการมอดูเลตแบบดิจิทัลที่โดดเด่นที่สุด
Amplitude Shift Keying
แอมพลิจูดของเอาต์พุตผลลัพธ์ขึ้นอยู่กับข้อมูลอินพุตว่าควรเป็นระดับศูนย์หรือรูปแบบของบวกและลบขึ้นอยู่กับความถี่ของพาหะ
Amplitude Shift Keying (ASK) เป็นประเภทของ Amplitude Modulation ซึ่งแสดงถึงข้อมูลไบนารีในรูปแบบของการเปลี่ยนแปลงในแอมพลิจูดของสัญญาณ
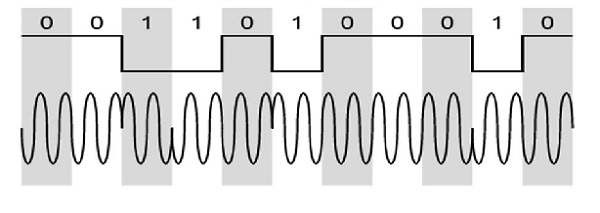
ต่อไปนี้เป็นแผนภาพสำหรับรูปคลื่นแบบมอดูเลต ASK พร้อมกับอินพุต

สัญญาณมอดูเลตใด ๆ มีพาหะความถี่สูง สัญญาณไบนารีเมื่อ ASK ถูกมอดูเลตจะให้ค่าเป็นศูนย์สำหรับอินพุต LOW และให้เอาต์พุตของพาหะสำหรับอินพุตสูง
การเปลี่ยนความถี่
ความถี่ของสัญญาณเอาต์พุตจะสูงหรือต่ำขึ้นอยู่กับข้อมูลอินพุตที่ใช้
Frequency Shift Keying (FSK)เป็นเทคนิคการมอดูเลตแบบดิจิทัลซึ่งความถี่ของสัญญาณพาหะจะแตกต่างกันไปตามการเปลี่ยนแปลงดิจิทัลแบบไม่ต่อเนื่อง FSK เป็นรูปแบบของการมอดูเลตความถี่
ต่อไปนี้เป็นแผนภาพสำหรับรูปคลื่นที่มอดูเลต FSK พร้อมกับอินพุต
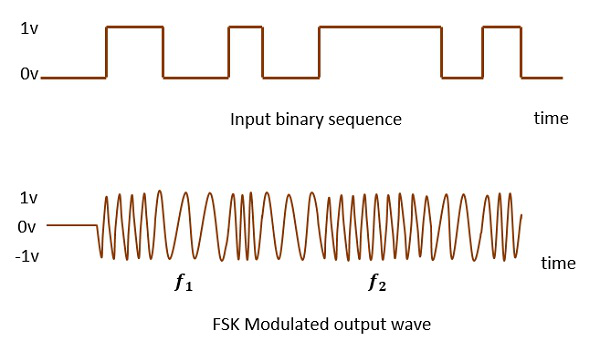
เอาต์พุตของคลื่นมอดูเลต FSK มีความถี่สูงสำหรับอินพุตไบนารี HIGH และความถี่ต่ำสำหรับอินพุต LOW ไบนารี ไบนารี 1s และ 0s ถูกเรียกว่าMark และ Space frequencies.
การคีย์ Shift เฟส
เฟสของสัญญาณเอาท์พุตจะเลื่อนขึ้นอยู่กับอินพุต ส่วนใหญ่เป็นสองประเภท ได้แก่ BPSK และ QPSK ตามจำนวนการเลื่อนเฟส อีกอันคือ DPSK ซึ่งเปลี่ยนเฟสตามค่าก่อนหน้า
Phase Shift Keying (PSK)เป็นเทคนิคการมอดูเลตแบบดิจิทัลซึ่งเฟสของสัญญาณพาหะมีการเปลี่ยนแปลงโดยการเปลี่ยนอินพุตไซน์และโคไซน์ในช่วงเวลาใดเวลาหนึ่ง เทคนิค PSK ใช้กันอย่างแพร่หลายสำหรับ LAN ไร้สายไบโอเมตริกการทำงานแบบไม่สัมผัสพร้อมกับการสื่อสาร RFID และ Bluetooth
PSK มีสองประเภทขึ้นอยู่กับระยะที่สัญญาณจะเปลี่ยนไป พวกเขาคือ -
คีย์กะไบนารีเฟส (BPSK)
นี้เรียกอีกอย่างว่า 2-phase PSK (หรือ) Phase Reversal Keying. ในเทคนิคนี้ผู้ให้บริการคลื่นไซน์ใช้การย้อนกลับสองเฟสเช่น 0 °และ 180 °
BPSK เป็นรูปแบบการมอดูเลต DSB-SC (Double Sideband Suppressed Carrier) สำหรับข้อความที่เป็นข้อมูลดิจิทัล
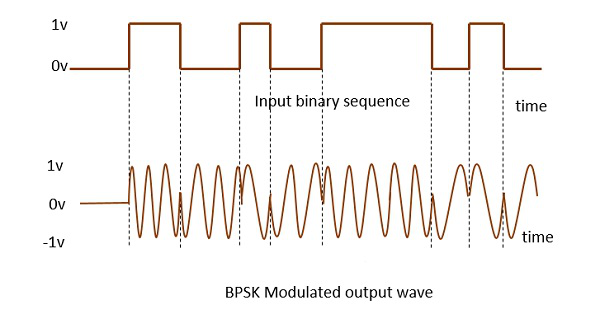
ต่อไปนี้เป็นภาพของคลื่นสัญญาณเอาต์พุต BPSK Modulated พร้อมกับอินพุต
การคีย์ Shift เฟสกำลังสอง (QPSK)
นี่คือเทคนิคการเปลี่ยนเฟสซึ่งผู้ให้บริการคลื่นไซน์ใช้การย้อนกลับสี่เฟสเช่น 0 °, 90 °, 180 °และ 270 °
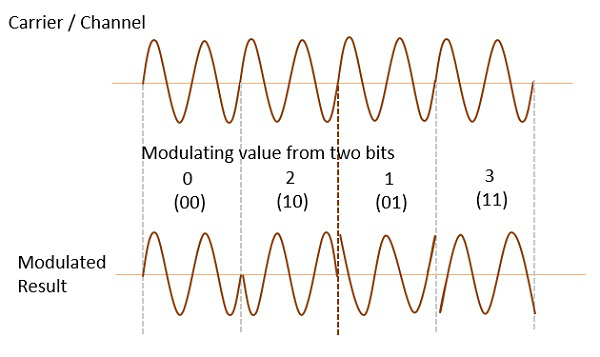
หากมีการขยายเทคนิคประเภทนี้เพิ่มเติม PSK สามารถทำได้โดยใช้ค่าแปดหรือสิบหกค่าขึ้นอยู่กับข้อกำหนด รูปต่อไปนี้แสดงถึงรูปคลื่น QPSK สำหรับอินพุตสองบิตซึ่งแสดงผลการมอดูเลตสำหรับอินสแตนซ์ที่แตกต่างกันของอินพุตไบนารี
QPSK เป็นรูปแบบหนึ่งของ BPSK และยังเป็นรูปแบบการมอดูเลต DSB-SC (Double Sideband Suppressed Carrier) ซึ่งส่งข้อมูลดิจิทัลสองบิตพร้อมกันเรียกว่า bigits.
แทนที่จะแปลงบิตดิจิทัลเป็นชุดของสตรีมดิจิทัลจะแปลงเป็นบิตคู่ ซึ่งจะลดอัตราบิตข้อมูลลงเหลือครึ่งหนึ่งซึ่งทำให้มีพื้นที่ว่างสำหรับผู้ใช้รายอื่น
การเปลี่ยนเฟสดิฟเฟอเรนเชียล (DPSK)
ใน DPSK (Differential Phase Shift Keying) เฟสของสัญญาณมอดูเลตจะเลื่อนโดยสัมพันธ์กับองค์ประกอบสัญญาณก่อนหน้า ไม่มีการพิจารณาสัญญาณอ้างอิงที่นี่ เฟสสัญญาณเป็นไปตามสถานะสูงหรือต่ำขององค์ประกอบก่อนหน้า เทคนิค DPSK นี้ไม่จำเป็นต้องมีออสซิลเลเตอร์อ้างอิง
รูปต่อไปนี้แสดงถึงรูปคลื่นโมเดลของ DPSK
จะเห็นได้จากรูปด้านบนว่าถ้าบิตข้อมูลมีค่าต่ำเช่น 0 แสดงว่าเฟสของสัญญาณจะไม่ย้อนกลับ แต่จะยังคงดำเนินต่อไปเหมือนเดิม ถ้าข้อมูลมีค่าสูงเช่น 1 เฟสของสัญญาณจะกลับด้านเช่นเดียวกับ NRZI จะกลับด้าน 1 (รูปแบบของการเข้ารหัสที่แตกต่างกัน)
หากเราสังเกตรูปคลื่นข้างต้นเราสามารถพูดได้ว่าสถานะสูงแสดงถึง M ในสัญญาณมอดูเลตและสถานะ LOW แสดงถึงไฟล์ W ในสัญญาณมอดูเลต
คำว่าไบนารีหมายถึงสองบิต M แสดงเพียงตัวเลขที่สอดคล้องกับจำนวนเงื่อนไขระดับหรือชุดค่าผสมที่เป็นไปได้สำหรับตัวแปรไบนารีจำนวนหนึ่ง
นี่คือเทคนิคการมอดูเลตแบบดิจิตอลที่ใช้สำหรับการส่งข้อมูลซึ่งแทนที่จะเป็นหนึ่งบิตสองหรือ more bits are transmitted at a time. เนื่องจากสัญญาณเดียวใช้สำหรับการส่งหลายบิตแบนด์วิดท์ของช่องสัญญาณจึงลดลง
สมการ M-ary
หากได้รับสัญญาณดิจิตอลภายใต้เงื่อนไขสี่ประการเช่นระดับแรงดันไฟฟ้าความถี่เฟสและแอมพลิจูดแล้ว M = 4.
จำนวนบิตที่จำเป็นในการสร้างเงื่อนไขตามจำนวนที่กำหนดจะแสดงทางคณิตศาสตร์เป็น
$$ N = \ log_ {2} M $$
ที่ไหน
N คือจำนวนบิตที่จำเป็น
M คือจำนวนเงื่อนไขระดับหรือชุดค่าผสมที่เป็นไปได้ด้วย N บิต
สมการข้างต้นสามารถจัดเรียงใหม่เป็น -
$$ 2 ^ {N} = M $$
ตัวอย่างเช่นด้วยสองบิต 22 = 4 เงื่อนไขเป็นไปได้
ประเภทของเทคนิค M-ary
โดยทั่วไป (M-ary) เทคนิคการมอดูเลตหลายระดับใช้ในการสื่อสารแบบดิจิทัลเป็นอินพุตดิจิทัลที่มีระดับการมอดูเลตมากกว่าสองระดับที่อนุญาตให้ใช้กับอินพุตของเครื่องส่งสัญญาณ ดังนั้นเทคนิคเหล่านี้จึงมีประสิทธิภาพแบนด์วิดท์
มีเทคนิคการมอดูเลต M-ary ที่แตกต่างกันมากมาย เทคนิคเหล่านี้บางส่วนปรับค่าพารามิเตอร์หนึ่งของสัญญาณพาหะเช่นแอมพลิจูดเฟสและความถี่
M-ary ถาม
นี้เรียกว่า M-ary Amplitude Shift Keying (M-ASK) หรือ M-ary Pulse Amplitude Modulation (PAM).
แอมพลิจูดของสัญญาณพาหะเริ่มขึ้น M ระดับที่แตกต่างกัน
การเป็นตัวแทนของ M-ary ASK
$$ S_m (t) = A_mcos (2 \ pi f_ct) \: \: \: \: \: \: A_m \ epsilon {(2m-1-M) \ Delta, m = 1,2 .... M } \: \: \: และ \: \: \: 0 \ leq t \ leq T_s $$
วิธีนี้ยังใช้ใน PAM การใช้งานทำได้ง่าย อย่างไรก็ตาม M-ary ASK มีความอ่อนไหวต่อเสียงรบกวนและการบิดเบือน
M-ary FSK
นี้เรียกว่าเป็น M-ary Frequency Shift Keying.
ความถี่ของสัญญาณผู้ให้บริการจะเกิดขึ้น M ระดับที่แตกต่างกัน
การเป็นตัวแทนของ M-ary FSK
$$ S_ {i} (t) = \ sqrt {\ frac {2E_ {s}} {T_ {S}}} \ cos \ lgroup \ frac {\ Pi} {T_ {s}} (n_ {c} + i) t \ rgroup \: \: \: \: 0 \ leq t \ leq T_ {s} \: \: \: และ \: \: \: i = 1,2 ..... M $$
โดยที่ $ f_ {c} = \ frac {n_ {c}} {2T_ {s}} $ สำหรับจำนวนเต็มคงที่ n.
สิ่งนี้ไม่ไวต่อเสียงรบกวนเท่า ASK ที่ส่งMจำนวนสัญญาณมีพลังงานและระยะเวลาเท่ากัน สัญญาณจะถูกคั่นด้วย $ \ frac {1} {2T_s} $Hz ทำให้สัญญาณตั้งฉากกัน
ตั้งแต่ Mสัญญาณตั้งฉากกันไม่มีความแออัดในพื้นที่สัญญาณ ประสิทธิภาพแบนด์วิดท์ของ M-ary FSK ลดลงและประสิทธิภาพการใช้พลังงานจะเพิ่มขึ้นตามการเพิ่มขึ้นของ M
M-ary PSK
สิ่งนี้เรียกว่า M-ary Phase Shift Keying
phase ของสัญญาณผู้ให้บริการจะเกิดขึ้น M ระดับที่แตกต่างกัน
การเป็นตัวแทนของ M-ary PSK
$$ S_ {i} (t) = \ sqrt {\ frac {2E} {T}} \ cos (w_ {0} t + \ emptyset_ {i} t) \: \: \: \: 0 \ leq t \ leq T_ {s} \: \: \: and \: \: \: i = 1,2 ..... M $$
$$ \ emptyset_ {i} t = \ frac {2 \ Pi i} {M} \: \: \: โดยที่ \: \: i = 1,2,3 ... \: ... M $$
ที่นี่ซองจดหมายจะคงที่และมีความเป็นไปได้ของเฟสมากกว่า วิธีนี้ใช้ในช่วงแรกของการสื่อสารในอวกาศ มีประสิทธิภาพดีกว่า ASK และ FSK ข้อผิดพลาดในการประมาณเฟสน้อยที่สุดที่เครื่องรับ
ประสิทธิภาพแบนด์วิธของ M-ary PSK จะลดลงและประสิทธิภาพการใช้พลังงานจะเพิ่มขึ้นตามการเพิ่มขึ้นของ M. จนถึงตอนนี้เราได้พูดถึงเทคนิคการมอดูเลตที่แตกต่างกัน ผลลัพธ์ของเทคนิคเหล่านี้ทั้งหมดเป็นลำดับไบนารีซึ่งแสดงเป็น 1s และ 0s ข้อมูลไบนารีหรือดิจิทัลนี้มีหลายประเภทและหลายรูปแบบซึ่งจะกล่าวถึงต่อไป
ข้อมูลเป็นแหล่งที่มาของระบบการสื่อสารไม่ว่าจะเป็นอนาล็อกหรือดิจิทัล Information theory เป็นวิธีการทางคณิตศาสตร์ในการศึกษาการเข้ารหัสข้อมูลพร้อมกับการหาปริมาณการจัดเก็บและการสื่อสารข้อมูล
เงื่อนไขการเกิดเหตุการณ์
หากเราพิจารณาเหตุการณ์มีสามเงื่อนไขของการเกิดขึ้น
หากเหตุการณ์ยังไม่เกิดขึ้นแสดงว่ามีเงื่อนไข uncertainty.
หากเหตุการณ์เพิ่งเกิดขึ้นมีเงื่อนไขของ surprise.
หากเหตุการณ์ได้เกิดขึ้นย้อนเวลามีเงื่อนไขของการมีบางอย่าง information.
ดังนั้นทั้งสามจึงเกิดขึ้นในช่วงเวลาที่ต่างกัน ความแตกต่างของเงื่อนไขเหล่านี้ช่วยให้เรามีความรู้เกี่ยวกับความน่าจะเป็นของเหตุการณ์ที่เกิดขึ้น
เอนโทรปี
เมื่อเราสังเกตความเป็นไปได้ของการเกิดเหตุการณ์ไม่ว่าจะเกิดความประหลาดใจหรือไม่แน่นอนเพียงใดนั่นหมายความว่าเราพยายามที่จะมีความคิดเกี่ยวกับเนื้อหาโดยเฉลี่ยของข้อมูลจากแหล่งที่มาของเหตุการณ์
Entropy สามารถกำหนดเป็นการวัดเนื้อหาข้อมูลโดยเฉลี่ยต่อสัญลักษณ์แหล่งที่มา Claude Shannonซึ่งเป็น“ บิดาแห่งทฤษฎีสารสนเทศ” ได้กำหนดสูตรไว้ว่า
$$ H = - \ sum_ {i} p_i \ log_ {b} p_i $$
โดยที่ $ p_i $ คือความน่าจะเป็นของการเกิดจำนวนอักขระ iจากสตรีมของอักขระที่กำหนดและ b คือฐานของอัลกอริทึมที่ใช้ ดังนั้นจึงเรียกอีกอย่างว่าShannon’s Entropy.
จำนวนความไม่แน่นอนที่เหลืออยู่เกี่ยวกับอินพุตช่องหลังจากสังเกตเอาต์พุตช่องเรียกว่า as Conditional Entropy. แสดงโดย $ H (x \ arrowvert y) $
แหล่งที่มาของหน่วยความจำแบบไม่ต่อเนื่อง
แหล่งที่มาซึ่งข้อมูลถูกปล่อยออกมาในช่วงเวลาต่อเนื่องกันซึ่งไม่ขึ้นกับค่าก่อนหน้านี้สามารถเรียกได้ว่าเป็น discrete memoryless source.
แหล่งที่มานี้ไม่ต่อเนื่องเนื่องจากไม่ได้รับการพิจารณาสำหรับช่วงเวลาต่อเนื่อง แต่เป็นช่วงเวลาที่ไม่ต่อเนื่อง แหล่งที่มานี้ไม่มีหน่วยความจำเนื่องจากเป็นแหล่งข้อมูลใหม่ในแต่ละช่วงเวลาโดยไม่พิจารณาค่าก่อนหน้า
การเข้ารหัสแหล่งที่มา
ตามคำจำกัดความ "ด้วยแหล่งที่มาของเอนโทรปี $ H (\ delta) $ แบบไม่ต่อเนื่องความยาวรหัส - คำโดยเฉลี่ย $ \ bar {L} $ สำหรับการเข้ารหัสแหล่งที่มาใด ๆ มีขอบเขตเป็น $ \ bar {L} \ geq H (\ delta) $”.
ในคำที่ง่ายกว่านั้น code-word (ตัวอย่างเช่นรหัสมอร์สสำหรับคำว่า QUEUE คือ -.- ..-. ..-.) จะมากกว่าหรือเท่ากับซอร์สโค้ดเสมอ (ตัวอย่างเช่น QUEUE) ซึ่งหมายความว่าสัญลักษณ์ในคำรหัสมีค่ามากกว่าหรือเท่ากับตัวอักษรในซอร์สโค้ด
การเข้ารหัสช่อง
การเข้ารหัสช่องสัญญาณในระบบการสื่อสารแนะนำความซ้ำซ้อนด้วยการควบคุมเพื่อปรับปรุงความน่าเชื่อถือของระบบ Source coding ช่วยลดความซ้ำซ้อนเพื่อปรับปรุงประสิทธิภาพของระบบ
การเข้ารหัสช่องประกอบด้วยการดำเนินการสองส่วน
Mapping ลำดับข้อมูลขาเข้าในลำดับอินพุตช่อง
Inverse mapping ลำดับช่องสัญญาณออกเป็นลำดับข้อมูลเอาต์พุต
เป้าหมายสุดท้ายคือควรลดผลกระทบโดยรวมของสัญญาณรบกวนของช่องสัญญาณ
การทำแผนที่ทำได้โดยเครื่องส่งสัญญาณด้วยความช่วยเหลือของตัวเข้ารหัสในขณะที่การทำแผนที่ผกผันจะกระทำที่เครื่องรับโดยตัวถอดรหัส
มีการใช้เทคนิคการส่งสัญญาณร่วมกันก่อนที่จะส่งสัญญาณเพื่อให้การสื่อสารที่ปลอดภัยหรือที่เรียกว่า Spread Spectrum Modulation. ข้อได้เปรียบหลักของเทคนิคการสื่อสารแบบกระจายสเปกตรัมคือการป้องกัน "การรบกวน" ไม่ว่าจะเป็นโดยเจตนาหรือไม่เจตนาก็ตาม
สัญญาณที่ปรับด้วยเทคนิคเหล่านี้ยากที่จะรบกวนและไม่สามารถติดขัดได้ ผู้บุกรุกที่ไม่มีการเข้าถึงอย่างเป็นทางการจะไม่ได้รับอนุญาตให้ถอดรหัส ดังนั้นจึงใช้เทคนิคเหล่านี้เพื่อวัตถุประสงค์ทางการทหาร สัญญาณสเปกตรัมการแพร่กระจายเหล่านี้ส่งที่ความหนาแน่นของพลังงานต่ำและมีการแพร่กระจายสัญญาณอย่างกว้างขวาง
ลำดับเสียงหลอก
ลำดับรหัส 1s และ 0s พร้อมคุณสมบัติความสัมพันธ์อัตโนมัติบางอย่างเรียกว่า as PseudoNoise coding sequenceใช้ในเทคนิคการแพร่กระจายสเปกตรัม เป็นลำดับความยาวสูงสุดซึ่งเป็นรหัสวงจรประเภทหนึ่ง
สัญญาณวงแคบ
สัญญาณวงแคบมีความเข้มข้นของสัญญาณดังแสดงในสเปกตรัมความถี่ในรูปต่อไปนี้

นี่คือคุณสมบัติของสัญญาณวงแคบ -
- แถบสัญญาณใช้ช่วงความถี่ที่แคบ
- ความหนาแน่นของพลังงานสูง
- การแพร่กระจายของพลังงานต่ำและเข้มข้น
แม้ว่าคุณสมบัติจะดี แต่สัญญาณเหล่านี้ก็มีแนวโน้มที่จะรบกวน
กระจายสัญญาณสเปกตรัม
สัญญาณสเปกตรัมการแพร่กระจายมีความแรงของสัญญาณกระจายดังแสดงในรูปสเปกตรัมความถี่ต่อไปนี้
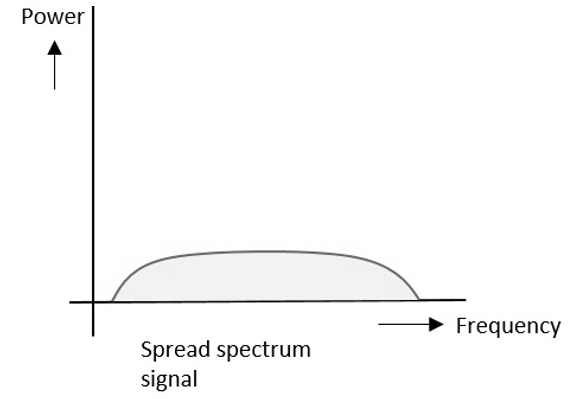
นี่คือคุณสมบัติของสัญญาณสเปกตรัมการแพร่กระจาย -
- แถบสัญญาณใช้ความถี่ที่หลากหลาย
- ความหนาแน่นของพลังงานต่ำมาก
- พลังงานเป็นที่แพร่หลาย
ด้วยคุณสมบัติเหล่านี้สัญญาณสเปกตรัมการแพร่กระจายจึงมีความทนทานต่อสัญญาณรบกวนหรือการรบกวนสูง เนื่องจากผู้ใช้หลายคนสามารถแชร์แบนด์วิดท์สเปกตรัมการแพร่กระจายเดียวกันได้โดยไม่รบกวนกันและกันสิ่งเหล่านี้จึงสามารถเรียกได้ว่าเป็นmultiple access techniques.
เทคนิคการเข้าถึงหลายสเปกตรัมการแพร่กระจายใช้สัญญาณที่มีแบนด์วิดท์การส่งซึ่งมีขนาดมากกว่าแบนด์วิดท์ RF ที่ต้องการขั้นต่ำ
สัญญาณสเปกตรัมการแพร่กระจายสามารถแบ่งออกเป็นสองประเภท -
- สเปกตรัมการแพร่กระจายของความถี่กระโดด (FHSS)
- Direct Sequence Spread สเปกตรัม (DSSS)
ความถี่ที่กระโดดกระจายสเปกตรัม
นี่คือเทคนิคการกระโดดความถี่ซึ่งผู้ใช้จะเปลี่ยนความถี่ของการใช้งานจากที่หนึ่งไปยังอีกที่หนึ่งในช่วงเวลาที่กำหนดจึงเรียกว่าเป็น frequency hopping.
ตัวอย่างเช่นความถี่ถูกกำหนดให้กับผู้ส่ง 1 ในช่วงเวลาหนึ่ง หลังจากนั้นสักครู่ผู้ส่ง 1 จะกระโดดไปยังความถี่อื่นและผู้ส่ง 2 ใช้ความถี่แรกซึ่งก่อนหน้านี้ผู้ส่ง 1 ใช้ นี้เรียกว่าเป็นfrequency reuse.
ความถี่ของข้อมูลจะถูกกระโดดจากกันเพื่อให้การรับส่งข้อมูลมีความปลอดภัย ระยะเวลาที่ใช้ในการกระโดดแต่ละความถี่เรียกว่าเป็นDwell time.
ลำดับโดยตรงกระจายสเปกตรัม
เมื่อใดก็ตามที่ผู้ใช้ต้องการส่งข้อมูลโดยใช้เทคนิค DSSS นี้ข้อมูลผู้ใช้แต่ละบิตจะถูกคูณด้วยรหัสลับที่เรียกว่ารหัสบิ่น นี้chipping codeไม่มีอะไรนอกจากรหัสการแพร่กระจายซึ่งคูณกับข้อความต้นฉบับและส่ง ผู้รับใช้รหัสเดียวกันในการดึงข้อความต้นฉบับ
DSSS นี้เรียกอีกอย่างว่า Code Division Multiple Access (CDMA).
การเปรียบเทียบระหว่าง FHSS และ DSSS / CDMA
เทคนิคการแพร่กระจายสเปกตรัมทั้งสองเป็นที่นิยมสำหรับลักษณะของพวกเขา เพื่อความเข้าใจที่ชัดเจนให้เรามาดูการเปรียบเทียบของพวกเขา
| FHSS | DSSS / CDMA |
|---|---|
| ใช้หลายความถี่ | ใช้ความถี่เดียว |
| ยากที่จะค้นหาความถี่ของผู้ใช้ในเวลาใดก็ได้ | ความถี่ของผู้ใช้เมื่อจัดสรรแล้วจะเท่ากันเสมอ |
| อนุญาตให้ใช้ซ้ำความถี่ได้ | ไม่อนุญาตให้ใช้ซ้ำความถี่ |
| ผู้ส่งไม่จำเป็นต้องรอ | ผู้ส่งต้องรอหากคลื่นความถี่ไม่ว่าง |
| ความแรงของสัญญาณสูง | ความแรงของสัญญาณต่ำ |
| มีความแข็งแกร่งและทะลุผ่านอุปสรรค | มันอ่อนแอกว่าเมื่อเทียบกับ FHSS |
| ไม่เคยได้รับผลกระทบจากการรบกวน | อาจได้รับผลกระทบจากสัญญาณรบกวน |
| มันถูกกว่า | มันแพง |
| นี่เป็นเทคนิคที่ใช้กันเป็นส่วนใหญ่ | เทคนิคนี้ไม่ได้ใช้บ่อย |
ข้อดีของการแพร่กระจายสเปกตรัม
ต่อไปนี้เป็นข้อดีของ Spread Spectrum
- การกำจัดการพูดคุยข้ามสาย
- ผลลัพธ์ที่ดีขึ้นพร้อมความสมบูรณ์ของข้อมูล
- ลดผลกระทบของการซีดจางหลายเส้นทาง
- ความปลอดภัยที่ดีขึ้น
- ลดสัญญาณรบกวน
- การอยู่ร่วมกับระบบอื่น ๆ
- ระยะการผ่าตัดที่ไกลขึ้น
- ยากที่จะตรวจจับ
- ยากที่จะ demodulate / ถอดรหัส
- สัญญาณติดขัดยากขึ้น
แม้ว่าเทคนิคการแพร่กระจายสเปกตรัมได้รับการออกแบบมาเพื่อการใช้งานทางทหาร แต่ตอนนี้มีการใช้กันอย่างแพร่หลายในเชิงพาณิชย์
เทคนิคการสื่อสารดิจิทัลที่กล่าวถึงจนถึงขณะนี้ได้นำไปสู่ความก้าวหน้าในการศึกษาการสื่อสารด้วยแสงและดาวเทียม ให้เราดูที่พวกเขา
ใยแก้วนำแสง
ใยแก้วนำแสงสามารถเข้าใจได้ว่าเป็นท่อนำคลื่นอิเล็กทริกซึ่งทำงานที่ความถี่แสง อุปกรณ์หรือท่อถ้างอหรือถ้ายุติเพื่อแผ่พลังงานเรียกว่ากwaveguideโดยทั่วไป ภาพต่อไปนี้แสดงสายเคเบิลใยแก้วนำแสงจำนวนมาก
พลังงานแม่เหล็กไฟฟ้าเดินทางผ่านในรูปของแสง การแพร่กระจายของแสงตามท่อนำคลื่นสามารถอธิบายได้ในรูปของชุดของคลื่นแม่เหล็กไฟฟ้าที่เรียกว่าmodes ของท่อนำคลื่น
หลักการทำงาน
พารามิเตอร์ทางแสงพื้นฐานที่เราควรมีความคิดในขณะที่ศึกษาไฟเบอร์ออปติกคือ Refractive index. ตามคำจำกัดความ“ อัตราส่วนของความเร็วแสงในสุญญากาศต่อสิ่งนั้นในสสารคือดัชนีการหักเหของแสงnของวัสดุ” แสดงเป็น -
$$ n = \ frac {c} {v} $$
ที่ไหน
c= ความเร็วแสงในพื้นที่ว่าง = 3 × 10 8 ม. / วินาที
v = ความเร็วของแสงในวัสดุที่เป็นไฟฟ้าหรือไม่นำไฟฟ้า
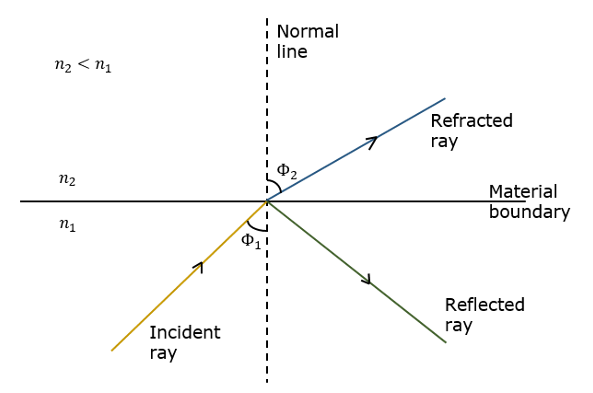
โดยทั่วไปสำหรับแสงเดินทาง reflectionจะเกิดขึ้นเมื่อ n 2 <n 1 การโค้งงอของแสงที่อินเทอร์เฟซเป็นผลมาจากความแตกต่างของความเร็วแสงในวัสดุสองชนิดที่มีดัชนีหักเหต่างกัน ความสัมพันธ์ระหว่างมุมเหล่านี้ที่อินเทอร์เฟซสามารถเรียกได้ว่าเป็นSnell’s law. แสดงเป็น -
$$ n_1sin \ phi _1 = n_2sin \ phi _2 $$
ที่ไหน
$ \ phi _1 $ คือมุมตกกระทบ
$ \ phi _2 $ คือมุมหักเห
n 1และ n 2เป็นดัชนีหักเหของวัสดุสองชนิด
สำหรับวัสดุที่มีความหนาแน่นทางแสงถ้าการสะท้อนเกิดขึ้นภายในวัสดุเดียวกันปรากฏการณ์ดังกล่าวจะเรียกว่าเป็น internal reflection. มุมตกกระทบและมุมหักเหแสดงดังรูปต่อไปนี้
ถ้ามุมตกกระทบ $ \ phi _1 $ มากกว่ามากมุมหักเห $ \ phi _2 $ ที่จุดหนึ่งจะกลายเป็นΠ / 2 ไม่สามารถหักเหต่อไปได้นอกเหนือจากจุดนี้ ดังนั้นจุดดังกล่าวจึงเรียกว่าCritical angle $\phi _c$. เมื่อมุมตกกระทบ $ \ phi _1 $ มากกว่ามุมวิกฤตเงื่อนไขสำหรับtotal internal reflection พอใจ
รูปต่อไปนี้แสดงเงื่อนไขเหล่านี้อย่างชัดเจน
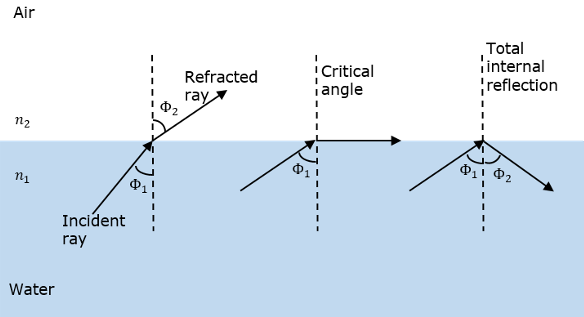
รังสีแสงหากผ่านเข้าไปในแก้วในสภาพเช่นนี้มันจะสะท้อนกลับเข้าไปในแก้วโดยสิ้นเชิงโดยไม่มีแสงเล็ดลอดออกมาจากพื้นผิวของแก้ว
ชิ้นส่วนของไฟเบอร์
ใยแก้วนำแสงที่ใช้กันมากที่สุดคือ single solid di-electric cylinder ของรัศมี aและดัชนีการหักเห n 1 . รูปต่อไปนี้อธิบายถึงชิ้นส่วนของใยแก้วนำแสง
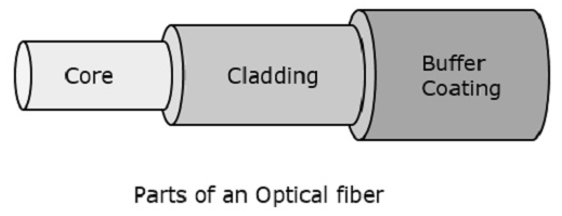
กระบอกนี้เรียกว่า Coreของเส้นใย วัสดุไฟฟ้าแบบทึบล้อมรอบแกนซึ่งเรียกว่าCladding. Cladding มีดัชนีหักเห n 2ซึ่งน้อยกว่า n 1
การหุ้มช่วยใน -
- ลดการสูญเสียที่กระจัดกระจาย
- เพิ่มความแข็งแรงเชิงกลให้กับเส้นใย
- ปกป้องแกนกลางจากการดูดซับสิ่งปนเปื้อนบนพื้นผิวที่ไม่ต้องการ
ประเภทของเส้นใยแสง
ขึ้นอยู่กับองค์ประกอบวัสดุของแกนมีเส้นใยสองประเภทที่ใช้กันทั่วไป พวกเขาคือ -
Step-index fiber - ดัชนีหักเหของแกนกลางมีความสม่ำเสมอและมีการเปลี่ยนแปลงอย่างกะทันหัน (หรือขั้นตอน) ที่ขอบเขตหุ้ม
Graded-index fiber - ดัชนีการหักเหของแกนกลางถูกสร้างขึ้นให้แตกต่างกันไปตามฟังก์ชันของระยะรัศมีจากศูนย์กลางของเส้นใย
ทั้งสองอย่างนี้แบ่งออกเป็น -
Single-mode fiber - เหล่านี้ตื่นเต้นกับเลเซอร์
Multi-mode fiber - ตื่นเต้นกับ LED
การสื่อสารด้วยใยแก้วนำแสง
ระบบการสื่อสารของไฟเบอร์ออปติกนั้นเข้าใจได้ดีโดยการศึกษาชิ้นส่วนและส่วนต่างๆของมัน องค์ประกอบหลักของระบบสื่อสารใยแก้วนำแสงแสดงดังรูปต่อไปนี้
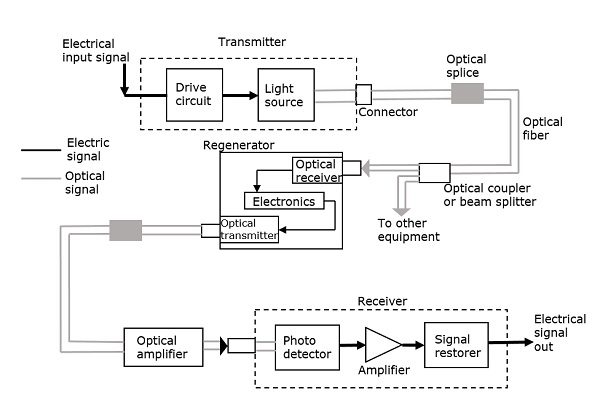
ส่วนประกอบพื้นฐาน ได้แก่ เครื่องส่งสัญญาณแสงใยแก้วนำแสงและตัวรับสัญญาณตรวจจับภาพถ่าย มีการใช้องค์ประกอบเพิ่มเติมเช่นตัวต่อไฟเบอร์และสายเคเบิลและคอนเนคเตอร์รีเจนเนอเรเตอร์ตัวแยกลำแสงและแอมพลิฟายเออร์ออปติกเพื่อปรับปรุงประสิทธิภาพของระบบการสื่อสาร
ข้อดีของการทำงาน
ข้อดีของเส้นใยแก้วนำแสงคือ -
แบนด์วิดท์การส่งของสายไฟเบอร์ออปติกสูงกว่าสายโลหะ
ปริมาณการรับส่งข้อมูลสูงกว่าในสายไฟเบอร์ออปติก
การสูญเสียพลังงานต่ำมากและเป็นประโยชน์ในการส่งสัญญาณทางไกล
สายไฟเบอร์ออปติกให้ความปลอดภัยสูงและไม่สามารถเคาะได้
สายไฟเบอร์ออปติกเป็นวิธีที่ปลอดภัยที่สุดสำหรับการรับส่งข้อมูล
สายไฟเบอร์ออปติกมีภูมิคุ้มกันต่อการรบกวนทางแม่เหล็กไฟฟ้า
สิ่งเหล่านี้ไม่ได้รับผลกระทบจากเสียงไฟฟ้า
ข้อดีทางกายภาพ
ข้อดีทางกายภาพของสายไฟเบอร์ออปติกคือ -
ความจุของสายเคเบิลเหล่านี้สูงกว่าสายลวดทองแดงมาก
แม้ว่าความจุจะสูงขึ้น แต่ขนาดของสายก็ไม่ได้เพิ่มขึ้นเหมือนในระบบสายทองแดง
พื้นที่ว่างที่ใช้โดยสายเคเบิลเหล่านี้น้อยกว่ามาก
น้ำหนักของสาย FOC เหล่านี้เบากว่าสายทองแดงมาก
เนื่องจากสายเคเบิลเหล่านี้เป็นแบบไฟฟ้าจึงไม่มีอันตรายจากประกายไฟ
สายเหล่านี้ทนต่อการกัดกร่อนได้ดีกว่าสายทองแดงเนื่องจากงอได้ง่ายและมีความยืดหยุ่น
วัตถุดิบในการผลิตสายไฟเบอร์ออปติกคือแก้วซึ่งมีราคาถูกกว่าทองแดง
สายไฟเบอร์ออปติกมีอายุการใช้งานยาวนานกว่าสายทองแดง
ข้อเสีย
แม้ว่าไฟเบอร์ออปติกจะมีข้อดีหลายประการ แต่ก็มีข้อเสียดังต่อไปนี้ -
แม้ว่าสายไฟเบอร์ออปติกจะมีอายุการใช้งานนานกว่า แต่ค่าใช้จ่ายในการติดตั้งก็สูง
จำนวนขาประจำจะต้องเพิ่มขึ้นตามระยะทาง
พวกมันเปราะบางหากไม่ได้อยู่ในปลอกพลาสติก ดังนั้นจึงจำเป็นต้องมีการป้องกันมากกว่าทองแดง
การใช้งานไฟเบอร์ออปติก
เส้นใยนำแสงมีการใช้งานมากมาย บางส่วนมีดังนี้ -
ใช้ในระบบโทรศัพท์
ใช้ในเครือข่ายเคเบิลใต้น้ำ
ใช้ในดาต้าลิงค์สำหรับเครือข่ายคอมพิวเตอร์ CATV Systems
ใช้ในกล้องวงจรปิด CCTV
ใช้สำหรับเชื่อมต่อดับเพลิงตำรวจและบริการฉุกเฉินอื่น ๆ
ใช้ในโรงพยาบาลโรงเรียนและระบบการจัดการจราจร
มีการใช้งานในอุตสาหกรรมมากมายและยังใช้ในงานก่อสร้างที่มีน้ำหนักมาก
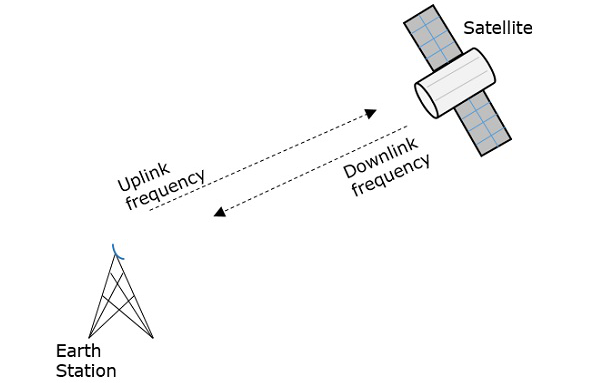
ก satellite คือร่างกายที่เคลื่อนที่ไปรอบ ๆ ร่างอื่นในเส้นทางที่คาดเดาได้ทางคณิตศาสตร์เรียกว่า Orbit. ดาวเทียมสื่อสารไม่ใช่อะไรนอกจากสถานีทวนสัญญาณไมโครเวฟในอวกาศที่มีประโยชน์ในการสื่อสารโทรคมนาคมวิทยุและโทรทัศน์พร้อมกับแอปพลิเคชันอินเทอร์เน็ต
ก repeaterเป็นวงจรที่เพิ่มความแรงของสัญญาณที่รับและส่งสัญญาณใหม่ แต่ที่นี่ repeater นี้ทำงานเป็นไฟล์transponderซึ่งจะเปลี่ยนย่านความถี่ของสัญญาณที่ส่งจากย่านที่ได้รับ
ความถี่ที่สัญญาณถูกส่งไปในอวกาศเรียกว่า Uplink frequencyในขณะที่ความถี่ที่ส่งโดยทรานสปอนเดอร์คือ Downlink frequency.
รูปต่อไปนี้แสดงให้เห็นถึงแนวคิดนี้อย่างชัดเจน
ตอนนี้ให้เรามาดูข้อดีข้อเสียและการประยุกต์ใช้การสื่อสารผ่านดาวเทียม
การสื่อสารผ่านดาวเทียม - ข้อดี
ข้อดีของการสื่อสารผ่านดาวเทียมมีหลายประการเช่น -
Flexibility
ง่ายในการติดตั้งวงจรใหม่
ครอบคลุมระยะทางได้อย่างง่ายดายและค่าใช้จ่ายไม่สำคัญ
ความเป็นไปได้ในการออกอากาศ
ทุกมุมโลกถูกปกคลุม
ผู้ใช้สามารถควบคุมเครือข่าย
การสื่อสารผ่านดาวเทียม - ข้อเสีย
การสื่อสารผ่านดาวเทียมมีข้อบกพร่องดังต่อไปนี้ -
ค่าใช้จ่ายเริ่มต้นเช่นส่วนและต้นทุนการเปิดตัวสูงเกินไป
ความแออัดของความถี่
การรบกวนและการขยายพันธุ์
การสื่อสารผ่านดาวเทียม - การใช้งาน
การสื่อสารผ่านดาวเทียมพบการใช้งานในพื้นที่ต่อไปนี้ -
ในวิทยุกระจายเสียง.
ในการแพร่ภาพโทรทัศน์เช่น DTH.
ในแอปพลิเคชันอินเทอร์เน็ตเช่นการให้การเชื่อมต่ออินเทอร์เน็ตสำหรับการถ่ายโอนข้อมูลแอปพลิเคชัน GPS ท่องอินเทอร์เน็ตเป็นต้น
สำหรับการสื่อสารด้วยเสียง
สำหรับภาคการวิจัยและพัฒนาในหลาย ๆ ด้าน
ในการใช้งานทางทหารและการนำทาง
การวางแนวของดาวเทียมในวงโคจรขึ้นอยู่กับกฎหมายสามประการที่เรียกว่ากฎของเคปเลอร์
กฎหมายของเคปเลอร์
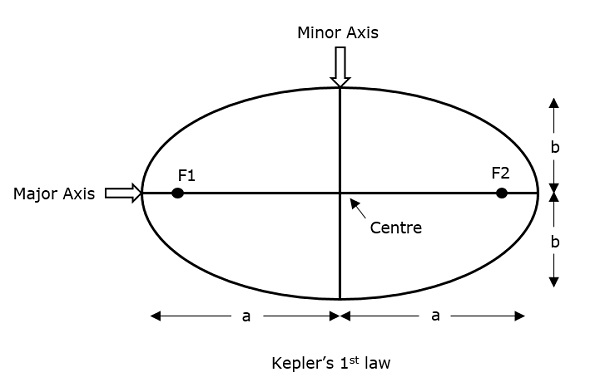
Johannes Kepler (1571-1630) นักวิทยาศาสตร์ดาราศาสตร์ให้กฎหมายปฏิวัติ 3 ฉบับเกี่ยวกับการเคลื่อนที่ของดาวเทียม เส้นทางตามด้วยดาวเทียมรอบปฐมภูมิ (พื้นโลก) คือellipse. วงรีมีสองจุดโฟกัส -F1 และ F2โลกเป็นหนึ่งในนั้น
หากพิจารณาระยะทางจากจุดศูนย์กลางของวัตถุถึงจุดหนึ่งบนเส้นทางวงรีแล้วจุดที่ไกลที่สุดของวงรีจากจุดศูนย์กลางจะเรียกว่า apogee และจุดที่สั้นที่สุดของวงรีจากจุดศูนย์กลางเรียกว่าเป็น perigee.
เคปเลอร์ 1 เซนต์กฎหมาย
เคปเลอร์ 1 เซนต์รัฐกฎหมายที่“ดาวเคราะห์ทุกดวงหมุนรอบดวงอาทิตย์ในวงโคจรเป็นรูปวงรีมีดวงอาทิตย์เป็นหนึ่งในจุดโฟกัสของมัน.” ด้วยเหตุนี้ดาวเทียมจึงเคลื่อนที่ไปในเส้นทางวงรีโดยมีโลกเป็นจุดโฟกัส
แกนกึ่งสำคัญของวงรีแสดงเป็น 'a'และแกนรองกึ่งเล็กแสดงเป็น b. ดังนั้นความเยื้องศูนย์ e ของระบบนี้สามารถเขียนได้ว่า -
$$ e = \ frac {\ sqrt {a ^ {2} -b ^ {2}}} {a} $$
Eccentricity (e) - เป็นพารามิเตอร์ที่กำหนดความแตกต่างของรูปร่างของวงรีแทนที่จะเป็นวงกลม
Semi-major axis (a) - เป็นเส้นผ่านศูนย์กลางที่ยาวที่สุดที่ลากเข้ากับจุดโฟกัสสองจุดตรงกึ่งกลางซึ่งสัมผัสทั้งสองจุด (จุดที่ไกลที่สุดของวงรีจากจุดศูนย์กลาง)
Semi-minor axis (b) - เป็นเส้นผ่านศูนย์กลางที่สั้นที่สุดที่ลากผ่านศูนย์กลางซึ่งสัมผัสทั้งสองรอบ (จุดที่สั้นที่สุดของวงรีจากจุดศูนย์กลาง)
สิ่งเหล่านี้อธิบายไว้อย่างดีในรูปต่อไปนี้
สำหรับเส้นทางรูปไข่เป็นที่พึงปรารถนาเสมอว่าความเยื้องศูนย์ควรอยู่ระหว่าง 0 ถึง 1 นั่นคือ 0 <e <1 เพราะถ้า e กลายเป็นศูนย์เส้นทางจะไม่เป็นรูปไข่อีกต่อไป แต่จะถูกเปลี่ยนเป็นเส้นทางวงกลม
เคปเลอร์ 2 ครั้งกฎหมาย
เคปเลอร์ 2 ครั้งที่รัฐกฎหมายว่า“สำหรับช่วงเวลาที่เท่ากันของเวลาพื้นที่ปกคลุมด้วยดาวเทียมเท่ากับส่วนที่เกี่ยวกับศูนย์ของแผ่นดิน.”
สามารถเข้าใจได้โดยดูที่รูปต่อไปนี้
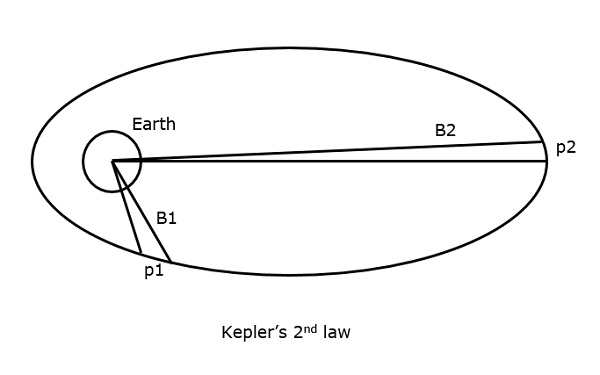
สมมติว่าดาวเทียมครอบคลุม p1 และ p2 ระยะทางในช่วงเวลาเดียวกันตามด้วยพื้นที่ B1 และ B2 ครอบคลุมในทั้งสองกรณีตามลำดับมีค่าเท่ากัน
กฎหมายเลขที่ 3 ของเคปเลอร์
3 เคปเลอร์ถรัฐกฎหมายที่“ตารางเวลาระยะของวงโคจรเป็นสัดส่วนกับก้อนของระยะทางเฉลี่ยระหว่างสองศพ.”
สิ่งนี้สามารถเขียนในเชิงคณิตศาสตร์เป็น
$$ T ^ {2} \: \ alpha \: \: a ^ {3} $$
ซึ่งหมายความว่า
$$ T ^ {2} = \ frac {4 \ pi ^ {2}} {GM} a ^ {3} $$
โดยที่ $ \ frac {4 \ pi ^ {2}} {GM} $ คือค่าคงที่ตามสัดส่วน (ตามกลศาสตร์ของนิวตัน)
$$ T ^ {2} = \ frac {4 \ pi ^ {2}} {\ mu} a ^ {3} $$
โดยที่μ = ค่าคงที่ความโน้มถ่วงของโลกคือΜ = 3.986005 × 10 14ม. 3 / วินาที2
$$ 1 = \ left (\ frac {2 \ pi} {T} \ right) ^ {2} \ frac {a ^ {3}} {\ mu} $$
$$ 1 = n ^ {2} \ frac {a ^ {3}} {\ mu} \: \: \: \ Rightarrow \: \: \: a ^ {3} = \ frac {\ mu} {n ^ {2}} $$
ที่ไหน n = การเคลื่อนที่เฉลี่ยของดาวเทียมในหน่วยเรเดียนต่อวินาที
การทำงานของดาวเทียมคำนวณโดยอาศัยกฎของเคปเลอร์
นอกจากนี้ยังมีสิ่งสำคัญที่ต้องสังเกต ดาวเทียมเมื่อหมุนรอบโลกจะได้รับแรงดึงจากพื้นโลกซึ่งเป็นแรงโน้มถ่วง นอกจากนี้ยังได้รับแรงดึงจากดวงอาทิตย์และดวงจันทร์ ดังนั้นจึงมีกองกำลังสองกองกำลังกระทำอยู่ พวกเขาคือ -
Centripetal force - แรงที่มีแนวโน้มที่จะดึงวัตถุที่เคลื่อนที่ในเส้นทางวิถีเข้าหาตัวเองเรียกว่า as centripetal force.
Centrifugal force - แรงที่มีแนวโน้มที่จะผลักวัตถุที่เคลื่อนที่ในเส้นทางการเคลื่อนที่ซึ่งอยู่ห่างจากตำแหน่งเรียกว่า as centrifugal force.
ดังนั้นดาวเทียมจึงต้องสร้างสมดุลของพลังทั้งสองนี้เพื่อให้ตัวเองอยู่ในวงโคจร
วงโคจรของโลก
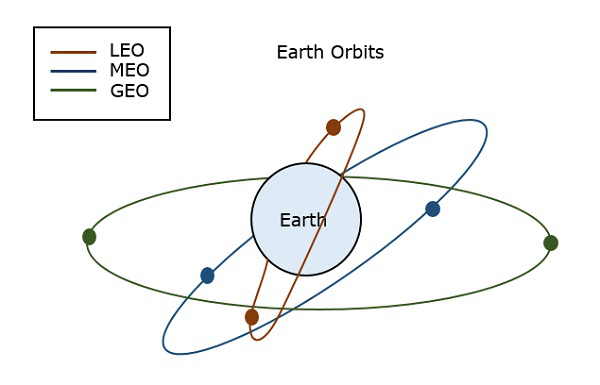
ดาวเทียมเมื่อปล่อยสู่อวกาศจำเป็นต้องวางไว้ในวงโคจรที่แน่นอนเพื่อให้เกิดการปฏิวัติโดยเฉพาะเพื่อรักษาการเข้าถึงและตอบสนองวัตถุประสงค์ไม่ว่าจะเป็นทางวิทยาศาสตร์การทหารหรือเชิงพาณิชย์ วงโคจรดังกล่าวซึ่งกำหนดให้กับดาวเทียมในส่วนที่เกี่ยวกับโลกเรียกว่าเป็นEarth Orbits. ดาวเทียมในวงโคจรเหล่านี้คือโลกOrbit Satellites.
วงโคจรของโลกที่สำคัญ ได้แก่ -
Geo Synchronous Earth Orbit
วงโคจรของโลกขนาดกลาง
วงโคจรต่ำของโลก
ดาวเทียมโคจรรอบโลกแบบ Geosynchronous
ก Geo-Synchronous Earth Orbit (GEO)ดาวเทียมเป็นดาวเทียมที่วางไว้ที่ระดับความสูง 22,300 ไมล์เหนือพื้นโลก วงโคจรนี้ซิงโครไนซ์กับside real day(เช่น 23 ชม. 56 นาที) วงโคจรนี้สามารถhave inclination and eccentricity. มันอาจไม่เป็นวงกลม วงโคจรนี้สามารถเอียงที่ขั้วของโลกได้ แต่ดูเหมือนจะหยุดนิ่งเมื่อสังเกตจากพื้นโลก
วงโคจรทางภูมิศาสตร์ซิงโครนัสเดียวกันถ้าเป็นวงกลมและอยู่ในระนาบของเส้นศูนย์สูตรจะเรียกว่าเป็น geo-stationary orbit. ดาวเทียมเหล่านี้ถูกวางไว้ที่ 35,900 กิโลเมตร (เช่นเดียวกับ geosynchronous) เหนือเส้นศูนย์สูตรของโลกและพวกมันจะหมุนไปเรื่อย ๆ ตามทิศทางของโลก (ตะวันตกไปตะวันออก) ดาวเทียมเหล่านี้ถือว่าอยู่นิ่งเมื่อเทียบกับโลกและด้วยเหตุนี้ชื่อจึงมีความหมาย
Geo-Stationary Earth Orbit Satellites ใช้สำหรับการพยากรณ์อากาศทีวีดาวเทียมวิทยุดาวเทียมและการสื่อสารทั่วโลกประเภทอื่น ๆ
รูปต่อไปนี้แสดงความแตกต่างระหว่างวงโคจร Geo-synchronous และ Geo-stationary แกนของการหมุนแสดงถึงการเคลื่อนที่ของโลก
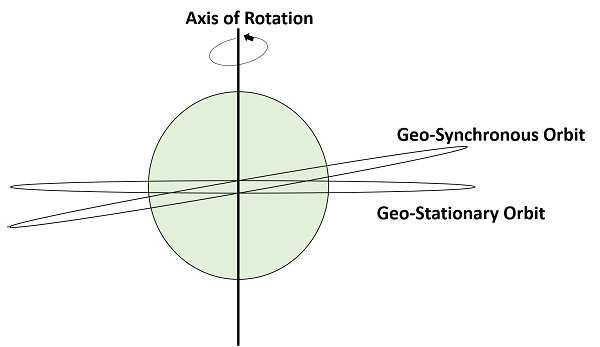
Note- วงโคจรที่เคลื่อนที่ทางภูมิศาสตร์ทุกวงเป็นวงโคจรทางภูมิศาสตร์ซิงโครนัส แต่ทุกวงโคจรทางภูมิศาสตร์ - ซิงโครนัสไม่ใช่วงโคจรที่อยู่กับที่
ดาวเทียมวงโคจรของโลกขนาดกลาง
Medium Earth Orbit (MEO)เครือข่ายดาวเทียมจะโคจรในระยะทางประมาณ 8000 ไมล์จากพื้นผิวโลก สัญญาณที่ส่งจากดาวเทียม MEO เดินทางในระยะทางสั้นกว่า สิ่งนี้แปลเป็นการปรับปรุงความแรงของสัญญาณเมื่อสิ้นสุดการรับสัญญาณ นี่แสดงให้เห็นว่าสามารถใช้ขั้วรับสัญญาณขนาดเล็กและน้ำหนักเบากว่าที่ปลายรับได้
เนื่องจากสัญญาณเดินทางเป็นระยะทางสั้นกว่าไปและกลับจากดาวเทียมจึงมีความล่าช้าในการส่งน้อยกว่า Transmission delay สามารถกำหนดเป็นเวลาที่สัญญาณจะเดินทางไปยังดาวเทียมและกลับลงไปที่สถานีรับสัญญาณ
สำหรับการสื่อสารแบบเรียลไทม์ยิ่งความล่าช้าในการส่งข้อมูลสั้นลงระบบการสื่อสารก็จะยิ่งดีขึ้นเท่านั้น ตัวอย่างเช่นหากดาวเทียม GEO ต้องใช้เวลา 0.25 วินาทีในการเดินทางไปกลับดาวเทียม MEO จะใช้เวลาน้อยกว่า 0.1 วินาทีในการเดินทางครั้งเดียวกัน MEO ทำงานในช่วงความถี่ 2 GHz ขึ้นไป
ดาวเทียมวงโคจรต่ำของโลก
ดาวเทียมวงโคจรต่ำ (LEO) ส่วนใหญ่แบ่งออกเป็นสามประเภท ได้แก่ LEO น้อย LEO ขนาดใหญ่และ Mega-LEO LEO จะโคจรในระยะ 500 ถึง 1,000 ไมล์เหนือพื้นผิวโลก
ระยะทางที่ค่อนข้างสั้นนี้ช่วยลดความล่าช้าในการส่งข้อมูลเหลือเพียง 0.05 วินาที ซึ่งจะช่วยลดความจำเป็นในการใช้อุปกรณ์รับสัญญาณที่ละเอียดอ่อนและมีขนาดใหญ่ LEO ตัวน้อยจะทำงานในช่วง 800 MHz (0.8 GHz) LEO ขนาดใหญ่จะทำงานในช่วง 2 GHz หรือสูงกว่าและ Mega-LEO ทำงานในช่วง 20-30 GHz
ความถี่ที่สูงขึ้นที่เกี่ยวข้องกับ Mega-LEOs แปลเป็นความสามารถในการรับข้อมูลที่มากขึ้นและให้ผลตอบแทนตามความสามารถของรูปแบบการส่งวิดีโอแบบเรียลไทม์และความล่าช้าต่ำ
รูปต่อไปนี้แสดงเส้นทางของ LEO, MEO และ GEO