การสื่อสารผ่านดาวเทียม - ระบบย่อย AOC
เราทราบดีว่าดาวเทียมอาจเบี่ยงเบนไปจากวงโคจรเนื่องจากแรงดึงดูดจากดวงอาทิตย์ดวงจันทร์และดาวเคราะห์ดวงอื่น ๆ กองกำลังเหล่านี้เปลี่ยนแปลงไปตามวัฏจักรในช่วง 24 ชั่วโมงเนื่องจากดาวเทียมเคลื่อนที่ไปรอบโลก
การควบคุมระดับความสูงและวงโคจร (AOC)ระบบย่อยประกอบด้วยมอเตอร์จรวดซึ่งสามารถวางดาวเทียมเข้าสู่วงโคจรที่เหมาะสมเมื่อใดก็ตามที่มันเบี่ยงเบนไปจากวงโคจรตามลำดับ ระบบย่อย AOC มีประโยชน์ในการสร้างเสาอากาศซึ่งเป็นประเภทลำแสงแคบชี้เข้าหาโลก
เราสามารถทำให้ระบบย่อย AOC เป็นดังต่อไปนี้ two parts.
- ระบบย่อยควบคุมระดับความสูง
- ระบบย่อยการควบคุมวงโคจร
ตอนนี้ให้เราพูดคุยเกี่ยวกับระบบย่อยทั้งสองนี้ทีละระบบ
ระบบย่อยควบคุมระดับความสูง
ระบบย่อยควบคุมระดับความสูงดูแลทิศทางของดาวเทียมในวงโคจรตามลำดับ ต่อไปนี้คือไฟล์two methods เพื่อทำให้ดาวเทียมที่อยู่ในวงโคจรมีเสถียรภาพ
- หมุนดาวเทียม
- วิธีสามแกน
หมุนดาวเทียม
ด้วยวิธีนี้ร่างกายของดาวเทียมจะหมุนไปรอบ ๆ spin axis. โดยทั่วไปสามารถหมุนได้ที่ 30 ถึง 100 รอบต่อนาทีเพื่อสร้างแรงซึ่งเป็นประเภทไจโรสโคป ด้วยเหตุนี้แกนหมุนจึงได้รับความเสถียรและดาวเทียมจะชี้ไปในทิศทางเดียวกัน ดาวเทียมประเภทนี้เรียกว่าspinners.
สปินเนอร์ประกอบด้วยดรัมซึ่งมีรูปทรงกระบอก กลองนี้หุ้มด้วยแผงโซล่าเซลล์ ระบบไฟฟ้าและจรวดมีอยู่ในกลองนี้
ระบบย่อยการสื่อสารวางอยู่ด้านบนของดรัม มอเตอร์ไฟฟ้าขับเคลื่อนระบบสื่อสารนี้ ทิศทางของมอเตอร์นี้จะตรงข้ามกับการหมุนของตัวดาวเทียมเพื่อให้เสาอากาศชี้ไปที่พื้นโลก ดาวเทียมที่ดำเนินการในลักษณะนี้เรียกว่าde-spin.
ในช่วงเปิดตัวดาวเทียม spinsเมื่อใช้งานหัวฉีดก๊าซเรเดียลขนาดเล็ก หลังจากนี้ไฟล์de-spin ระบบทำงานเพื่อให้เสาอากาศของระบบย่อย TTCM ชี้ไปที่สถานีดิน
วิธีสามแกน
ในวิธีนี้เราสามารถทำให้ดาวเทียมมีเสถียรภาพได้โดยใช้ล้อโมเมนตัมหนึ่งวงขึ้นไป วิธีนี้เรียกว่าthree-axis method. ข้อดีของวิธีนี้คือการวางแนวของดาวเทียมในสามแกนจะได้รับการควบคุมและไม่จำเป็นต้องหมุนตัวหลักของดาวเทียม
ด้วยวิธีนี้ดังต่อไปนี้ three axes ได้รับการพิจารณา
Roll axis พิจารณาในทิศทางที่ดาวเทียมเคลื่อนที่ในระนาบวงโคจร
Yaw axis ได้รับการพิจารณาในทิศทางที่มุ่งสู่โลก
Pitch axis พิจารณาในทิศทางซึ่งตั้งฉากกับระนาบวงโคจร
แกนทั้งสามนี้แสดงไว้ด้านล่าง figure.
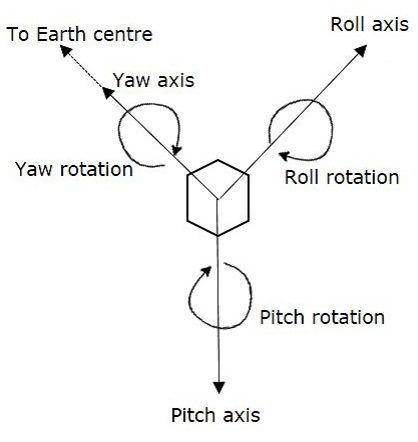
ให้ X R , Y Rและ Z Rเป็นแกนม้วนแกนหันเหและแกนพิทช์ตามลำดับ แกนทั้งสามนี้กำหนดโดยพิจารณาตำแหน่งของดาวเทียมเป็นreference. แกนทั้งสามนี้กำหนดระดับความสูงของดาวเทียม
ให้ X, Y และ Z เป็นอีกชุดหนึ่งของแกนคาร์ทีเซียน ชุดแกนสามแกนนี้ให้ข้อมูลเกี่ยวกับการวางแนวของดาวเทียมที่เกี่ยวกับแกนอ้างอิง หากมีการเปลี่ยนแปลงระดับความสูงของดาวเทียมมุมระหว่างแกนต่างๆจะเปลี่ยนไป
ในวิธีนี้แต่ละแกนจะมีไอพ่นก๊าซสองตัว พวกเขาจะให้การหมุนทั้งสองทิศทางของแกนสามแกน
first gas jet จะดำเนินการเป็นระยะเวลาหนึ่งเมื่อมีความต้องการของการเคลื่อนที่ของดาวเทียมในทิศทางแกนเฉพาะ
second gas jetจะดำเนินการในช่วงเวลาเดียวกันเมื่อดาวเทียมไปถึงตำแหน่งที่ต้องการ ดังนั้นแก๊สเจ็ทที่สองจะหยุดการเคลื่อนที่ของดาวเทียมในทิศทางแกนนั้น
ระบบย่อยการควบคุมวงโคจร
ระบบย่อยควบคุมวงโคจรมีประโยชน์ในการนำดาวเทียมเข้าสู่วงโคจรที่ถูกต้องเมื่อใดก็ตามที่ดาวเทียมเบี่ยงออกจากวงโคจร
ระบบย่อย TTCM ที่อยู่ที่สถานีพื้นโลกจะตรวจสอบตำแหน่งของดาวเทียม หากมีการเปลี่ยนแปลงใด ๆ ในวงโคจรดาวเทียมจะส่งสัญญาณเกี่ยวกับการแก้ไขไปยังระบบย่อยการควบคุมวงโคจร จากนั้นจะแก้ไขปัญหานั้นโดยการนำดาวเทียมเข้าสู่วงโคจรที่ถูกต้อง
ด้วยวิธีนี้ไฟล์ AOC subsystem ดูแลตำแหน่งดาวเทียมในวงโคจรที่เหมาะสมและในระดับความสูงที่เหมาะสมตลอดช่วงชีวิตทั้งหมดของดาวเทียมในอวกาศ