การสื่อสารผ่านดาวเทียม - คู่มือฉบับย่อ
โดยทั่วไปก satelliteเป็นวัตถุขนาดเล็กที่หมุนรอบวัตถุขนาดใหญ่ในอวกาศ ตัวอย่างเช่นดวงจันทร์เป็นบริวารของโลกตามธรรมชาติ
เรารู้ว่า Communicationหมายถึงการแลกเปลี่ยน (แบ่งปัน) ข้อมูลระหว่างสองหน่วยงานขึ้นไปผ่านสื่อหรือช่องทางใด ๆ กล่าวอีกนัยหนึ่งก็คือไม่มีอะไรนอกจากการส่งการรับและการประมวลผลข้อมูล
หากการสื่อสารเกิดขึ้นระหว่างสถานีโลกสองแห่งผ่านดาวเทียมจะเรียกว่าเป็น satellite communication. ในการสื่อสารนี้ใช้คลื่นแม่เหล็กไฟฟ้าเป็นสัญญาณพาหะ สัญญาณเหล่านี้นำข้อมูลเช่นเสียงเสียงวิดีโอหรือข้อมูลอื่นใดระหว่างพื้นดินและอวกาศและในทางกลับกัน
สหภาพโซเวียตได้เปิดตัวดาวเทียมประดิษฐ์ดวงแรกของโลกชื่อ Sputnik 1 ในปี 2500 หลังจากนั้นเกือบ 18 ปีอินเดียก็ได้เปิดตัวดาวเทียมประดิษฐ์ชื่อ Aryabhata ในปี 2518
ต้องการการสื่อสารผ่านดาวเทียม
การแพร่กระจายสองชนิดต่อไปนี้ใช้ก่อนหน้านี้เพื่อการสื่อสารในระยะไกล
Ground wave propagation- การแพร่กระจายคลื่นพื้นเหมาะสำหรับความถี่สูงถึง 30MHz วิธีการสื่อสารนี้ใช้ประโยชน์จากสภาพโทรโพสเฟียร์ของโลก
Sky wave propagation - แบนด์วิดท์ที่เหมาะสมสำหรับการสื่อสารประเภทนี้กว้างระหว่าง 30–40 MHz และใช้ประโยชน์จากคุณสมบัติไอโอโนสเฟียร์ของโลก
การกระโดดสูงสุดหรือระยะทางของสถานีถูก จำกัด ไว้ที่ 1500KM เฉพาะทั้งในการแพร่กระจายคลื่นพื้นดินและการแพร่กระจายคลื่นท้องฟ้า การสื่อสารผ่านดาวเทียมเอาชนะข้อ จำกัด นี้ ด้วยวิธีนี้ดาวเทียมให้communication for long distancesซึ่งอยู่เหนือเส้นสายตา
เนื่องจากดาวเทียมตั้งอยู่ที่ระดับความสูงเหนือพื้นโลกการสื่อสารจึงเกิดขึ้นระหว่างสถานีโลกทั้งสองแห่งได้อย่างง่ายดายผ่านดาวเทียม ดังนั้นจึงเอาชนะข้อ จำกัด ของการสื่อสารระหว่างสถานีโลกสองแห่งเนื่องจากความโค้งของโลก
ดาวเทียมทำงานอย่างไร
ก satelliteคือร่างกายที่เคลื่อนไหวไปรอบ ๆ ร่างกายอื่นในเส้นทางเฉพาะ ดาวเทียมสื่อสารไม่ใช่แค่สถานีทวนสัญญาณไมโครเวฟในอวกาศ เป็นประโยชน์ในการสื่อสารโทรคมนาคมวิทยุและโทรทัศน์พร้อมกับแอปพลิเคชันอินเทอร์เน็ต
ก repeaterเป็นวงจรที่เพิ่มความแรงของสัญญาณที่ได้รับแล้วส่งไป แต่ตัวทำซ้ำนี้ทำงานเป็นไฟล์transponder. นั่นหมายความว่ามันจะเปลี่ยนย่านความถี่ของสัญญาณที่ส่งจากสัญญาณที่ได้รับ
ความถี่ที่สัญญาณถูกส่งไปในอวกาศเรียกว่าเป็น Uplink frequency. ในทำนองเดียวกันความถี่ที่สัญญาณถูกส่งโดยช่องสัญญาณเรียกว่าเป็นDownlink frequency. รูปต่อไปนี้แสดงให้เห็นถึงแนวคิดนี้อย่างชัดเจน
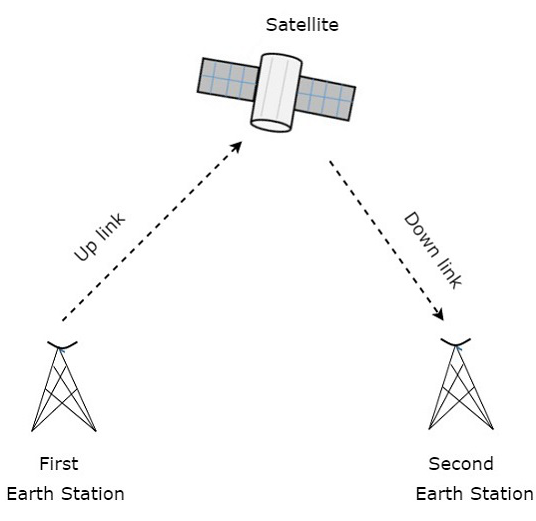
การส่งสัญญาณจากสถานีภาคพื้นดินแห่งแรกไปยังดาวเทียมผ่านช่องสัญญาณเรียกว่าเป็น uplink. ในทำนองเดียวกันการส่งสัญญาณจากดาวเทียมไปยังสถานีดินที่สองผ่านช่องสัญญาณเรียกว่า asdownlink.
Uplink frequencyคือความถี่ที่สถานีภาคพื้นดินแห่งแรกกำลังสื่อสารกับดาวเทียม ทรานสปอนเดอร์ดาวเทียมแปลงสัญญาณนี้เป็นความถี่อื่นและส่งลงไปยังสถานีพื้นโลกที่สอง ความถี่นี้เรียกว่าDownlink frequency. ในทำนองเดียวกันสถานีดินที่สองสามารถสื่อสารกับสถานีแรกได้ด้วย
กระบวนการสื่อสารผ่านดาวเทียมเริ่มต้นที่สถานีภาคพื้นดิน ที่นี่การติดตั้งออกแบบมาเพื่อส่งและรับสัญญาณจากดาวเทียมในวงโคจรรอบโลก สถานีโลกจะส่งข้อมูลไปยังดาวเทียมในรูปแบบของสัญญาณพลังงานสูงความถี่สูง (ช่วง GHz)
ดาวเทียมจะรับและส่งสัญญาณกลับมายังพื้นโลกอีกครั้งซึ่งได้รับจากสถานีภาคพื้นดินอื่น ๆ ในพื้นที่ครอบคลุมของดาวเทียม ดาวเทียมfootprint คือบริเวณที่รับสัญญาณความแรงที่เป็นประโยชน์จากดาวเทียม
ข้อดีข้อเสียของการสื่อสารผ่านดาวเทียม
ในส่วนนี้ให้เราดูข้อดีและข้อเสียของการสื่อสารผ่านดาวเทียม
ต่อไปนี้คือไฟล์ advantages การใช้การสื่อสารผ่านดาวเทียม:
พื้นที่ครอบคลุมมากกว่าระบบภาคพื้นดิน
ทุกมุมของโลกสามารถปกคลุมได้
ค่าส่งไม่ขึ้นอยู่กับพื้นที่ครอบคลุม
แบนด์วิดท์และความเป็นไปได้ในการแพร่ภาพมากขึ้น
ต่อไปนี้คือไฟล์ disadvantages การใช้การสื่อสารผ่านดาวเทียม -
การปล่อยดาวเทียมขึ้นสู่วงโคจรเป็นกระบวนการที่มีค่าใช้จ่ายสูง
ความล่าช้าในการแพร่กระจายของระบบดาวเทียมมีมากกว่าระบบภาคพื้นดินทั่วไป
ยากที่จะจัดให้มีกิจกรรมการซ่อมแซมหากเกิดปัญหาในระบบดาวเทียม
การสูญเสียพื้นที่ว่างมีมากขึ้น
อาจมีความแออัดของความถี่
การประยุกต์ใช้การสื่อสารผ่านดาวเทียม
การสื่อสารผ่านดาวเทียมมีบทบาทสำคัญในชีวิตประจำวันของเรา ต่อไปนี้เป็นแอพพลิเคชั่นของการสื่อสารผ่านดาวเทียม -
วิทยุกระจายเสียงและการสื่อสารด้วยเสียง
การแพร่ภาพโทรทัศน์เช่น Direct To Home (DTH)
แอปพลิเคชั่นอินเทอร์เน็ตเช่นการเชื่อมต่ออินเทอร์เน็ตสำหรับการถ่ายโอนข้อมูลแอพพลิเคชั่น GPS ท่องอินเทอร์เน็ตเป็นต้น
การใช้งานและการนำทางทางทหาร
แอปพลิเคชันการสำรวจระยะไกล
การตรวจสอบสภาพอากาศและการพยากรณ์
เรารู้ว่าเส้นทางของดาวเทียมที่หมุนรอบโลกเป็นที่รู้จักกันในชื่อ orbit. เส้นทางนี้สามารถแสดงด้วยสัญกรณ์ทางคณิตศาสตร์ กลศาสตร์การโคจรคือการศึกษาการเคลื่อนที่ของดาวเทียมที่มีอยู่ในวงโคจร ดังนั้นเราจึงสามารถเข้าใจการทำงานของอวกาศได้อย่างง่ายดายด้วยความรู้เกี่ยวกับการเคลื่อนที่ของวงโคจร
องค์ประกอบการโคจร
องค์ประกอบของวงโคจรเป็นพารามิเตอร์ซึ่งมีประโยชน์ในการอธิบายการเคลื่อนที่ของวงโคจรของดาวเทียม ต่อไปนี้คือไฟล์orbital elements.
- แกนกึ่งหลัก
- Eccentricity
- หมายถึงความผิดปกติ
- อาร์กิวเมนต์ของ perigee
- Inclination
- การขึ้นไปทางขวาของโหนดจากน้อยไปมาก
องค์ประกอบวงโคจรทั้งหกข้างต้นกำหนดวงโคจรของดาวเทียมโลก ดังนั้นจึงเป็นเรื่องง่ายที่จะแยกแยะดาวเทียมดวงหนึ่งจากดาวเทียมดวงอื่นโดยพิจารณาจากค่าขององค์ประกอบวงโคจร
แกนกึ่งหลัก
ความยาวของ Semi-major axis (a)กำหนดขนาดของวงโคจรของดาวเทียม มันเป็นครึ่งหนึ่งของแกนหลัก สิ่งนี้จะวิ่งจากจุดศูนย์กลางผ่านโฟกัสไปที่ขอบของวงรี ดังนั้นมันจึงเป็นรัศมีของวงโคจรที่จุดสองจุดที่ไกลที่สุดของวงโคจร
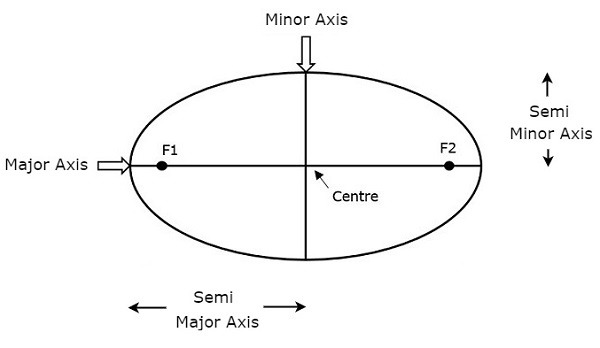
ทั้งแกนกึ่งหลักและกึ่งรองจะแสดงในรูปด้านบน ความยาวกึ่งmajor axis (a) ไม่เพียง แต่กำหนดขนาดวงโคจรของดาวเทียมเท่านั้น แต่ยังรวมถึงช่วงเวลาแห่งการปฏิวัติด้วย
ถ้าวงโคจรแบบวงกลมถือเป็นกรณีพิเศษความยาวของแกนกึ่งสำคัญจะเท่ากับ radius ของวงโคจรวงกลมนั้น
ความเยื้องศูนย์
คุณค่าของ Eccentricity (e)แก้ไขรูปร่างของวงโคจรของดาวเทียม พารามิเตอร์นี้บ่งชี้ความเบี่ยงเบนของรูปร่างของวงโคจรจากวงกลมที่สมบูรณ์แบบ
ถ้าความยาวของแกนกึ่งหลักและแกนรองกึ่งเล็กของวงโคจรรูปไข่เป็น a & b ดังนั้นนิพจน์ทางคณิตศาสตร์สำหรับ eccentricity (e) จะ
$$e = \frac{\sqrt{a^2 - b^2}}{a}$$
ค่าของความเยื้องศูนย์ของวงโคจรวงกลมคือ zeroเนื่องจากทั้ง a & b เท่ากัน ในขณะที่ค่าของความเยื้องศูนย์ของวงโคจรรูปไข่อยู่ระหว่างศูนย์ถึงหนึ่ง
ดังต่อไปนี้ figure แสดงวงโคจรของดาวเทียมต่างๆสำหรับค่าความเยื้องศูนย์ที่แตกต่างกัน (e)
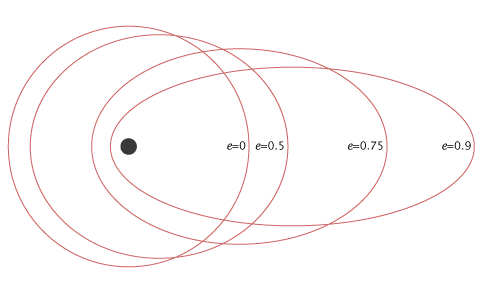
จากรูปด้านบนวงโคจรของดาวเทียมที่สอดคล้องกับค่าความเยื้องศูนย์ (e) ของศูนย์คือวงโคจรวงกลม และวงโคจรของดาวเทียมอีกสามดวงที่เหลือเป็นวงรีที่สอดคล้องกับค่าความเบี้ยว (e) 0.5, 0.75 และ 0.9
หมายถึงความผิดปกติ
สำหรับดาวเทียมจุดที่อยู่ใกล้โลกมากที่สุดเรียกว่า Perigee Mean anomaly (M) ให้ค่าเฉลี่ยของตำแหน่งเชิงมุมของดาวเทียมโดยอ้างอิงถึง perigee
ถ้าวงโคจรเป็นวงกลมความผิดปกติค่าเฉลี่ยจะให้ตำแหน่งเชิงมุมของดาวเทียมในวงโคจร แต่ถ้าวงโคจรเป็นวงรีการคำนวณตำแหน่งที่แน่นอนนั้นยากมาก ในขณะนั้นค่าเฉลี่ยความผิดปกติจะใช้เป็นขั้นตอนกลาง
อาร์กิวเมนต์ของ Perigee
วงโคจรของดาวเทียมตัดระนาบเส้นศูนย์สูตรสองจุด จุดแรกเรียกว่าdescending nodeซึ่งดาวเทียมเคลื่อนผ่านจากซีกโลกเหนือไปยังซีกโลกใต้ จุดที่สองเรียกว่าascending nodeซึ่งดาวเทียมเคลื่อนผ่านจากซีกโลกใต้ไปยังซีกโลกเหนือ
Argument of perigee (ω)คือมุมระหว่างโหนดจากน้อยไปมากและ perigee ถ้าทั้ง perigee และโหนดจากน้อยไปมากมีอยู่ในจุดเดียวกันอาร์กิวเมนต์ของ perigee จะเป็นศูนย์องศา
อาร์กิวเมนต์ของ perigee วัดได้ในระนาบวงโคจรที่ศูนย์กลางของโลกในทิศทางการเคลื่อนที่ของดาวเทียม
ความโน้มเอียง
มุมระหว่างระนาบวงโคจรกับระนาบเส้นศูนย์สูตรของโลกเรียกว่า inclination (i). วัดจากโหนดจากน้อยไปมากโดยมีทิศทางเป็นตะวันออกไปเหนือ ดังนั้นการเอียงจึงกำหนดแนวของวงโคจรโดยพิจารณาจากเส้นศูนย์สูตรของโลกเป็นข้อมูลอ้างอิง

มีสี่ประเภทของวงโคจรตามมุมเอียง
Equatorial orbit - มุมเอียงเป็นศูนย์องศาหรือ 180 องศา
Polar orbit - มุมเอียง 90 องศา
Prograde orbit - มุมเอียงอยู่ระหว่างศูนย์ถึง 90 องศา
Retrograde orbit - มุมเอียงอยู่ระหว่าง 90 ถึง 180 องศา
การขึ้นไปทางขวาของโหนดจากน้อยไปมาก
เรารู้ว่า ascending node คือจุดที่ดาวเทียมพาดผ่านระนาบเส้นศูนย์สูตรขณะเคลื่อนจากซีกโลกใต้ไปยังซีกโลกเหนือ
การขึ้นไปทางขวาของโหนดจากน้อยไปหามาก (Ω)คือมุมระหว่างเส้นของราศีเมษและโหนขึ้นไปทางทิศตะวันออกในระนาบเส้นศูนย์สูตร ราศีเมษเรียกอีกอย่างว่า vernal และ equinox
ดาวเทียม ground trackคือเส้นทางบนพื้นผิวโลกซึ่งอยู่ใต้วงโคจรของมัน การติดตามพื้นของดาวเทียมอาจมีหลายรูปแบบขึ้นอยู่กับค่าขององค์ประกอบการโคจร
สมการการโคจร
ในส่วนนี้ให้เราพูดคุยเกี่ยวกับสมการที่เกี่ยวข้องกับการเคลื่อนที่ของวงโคจร
กองกำลังที่ทำหน้าที่บนดาวเทียม
ดาวเทียมเมื่อหมุนรอบโลกจะได้รับแรงดึงจากโลกเนื่องจากแรงดึงดูดของโลก กองกำลังนี้เรียกว่าCentripetal force(F 1 ) เนื่องจากแรงนี้ทำให้ดาวเทียมพุ่งเข้าหามัน
ในทางคณิตศาสตร์ Centripetal force(F 1 ) ที่ทำหน้าที่บนดาวเทียมเนื่องจากพื้นโลกสามารถเขียนเป็น
$$F_{1} = \frac{GMm}{R^2} $$
ที่ไหน
Gเป็นสากลอย่างต่อเนื่องแรงโน้มถ่วงและมันจะมีค่าเท่ากับ 6.673 x 10 -11 N ∙ม. 2 / กก. 2
Mคือมวลของโลกและเท่ากับ 5.98 x 10 24 Kg.
m คือมวลของดาวเทียม
R คือระยะทางจากดาวเทียมถึงศูนย์กลางของโลก
ดาวเทียมเมื่อหมุนรอบโลกจะได้รับแรงดึงจากดวงอาทิตย์และดวงจันทร์เนื่องจากแรงดึงดูดของโลก กองกำลังนี้เรียกว่าCentrifugal force(F 2 ) เนื่องจากแรงนี้ทำให้ดาวเทียมอยู่ห่างจากพื้นโลก
ในทางคณิตศาสตร์ Centrifugal force(F 2 ) ที่แสดงบนดาวเทียมสามารถเขียนเป็น
$$F_{2} = \frac{mv^2}{R} $$
ที่ไหน v คือความเร็วในการโคจรของดาวเทียม
ความเร็ววงโคจร
ความเร็วในการโคจรของดาวเทียมคือความเร็วที่ดาวเทียมหมุนรอบโลก ดาวเทียมไม่เบี่ยงเบนไปจากวงโคจรและเคลื่อนที่ด้วยความเร็วที่แน่นอนในวงโคจรนั้นเมื่อทั้งแรงสู่ศูนย์กลางและแรงเหวี่ยงbalance ซึ่งกันและกัน
ดังนั้น, equateแรงสู่ศูนย์กลาง (F 1 ) และแรงเหวี่ยง (F 2 )
$$\frac{GMm}{R^2} = \frac{mv^2}{R}$$
$$= > \frac{GM}{R} = v^2$$
$$= > v = \sqrt{\frac{GM}{R}}$$
ดังนั้นไฟล์ orbital velocity ของดาวเทียมคือ
$$v = \sqrt{\frac{GM}{R}}$$
ที่ไหน
Gเป็นค่าคงที่แรงโน้มถ่วงและมันจะมีค่าเท่ากับ 6.673 x 10 -11 N ∙ม. 2 / กก. 2
Mคือมวลของโลกและเท่ากับ 5.98 x 10 24 Kg.
R คือระยะทางจากดาวเทียมถึงศูนย์กลางของโลก
ดังนั้นความเร็วในการโคจรเป็นหลัก depends ในระยะห่างจากดาวเทียมถึงศูนย์กลางของโลก (R) เนื่องจาก G & M เป็นค่าคงที่
เรารู้ว่าดาวเทียมหมุนรอบโลกซึ่งคล้ายกับโลกหมุนรอบดวงอาทิตย์ ดังนั้นหลักการที่ใช้กับโลกและการเคลื่อนที่รอบดวงอาทิตย์จึงใช้ได้กับดาวเทียมและการเคลื่อนที่รอบโลกด้วย
นักวิทยาศาสตร์หลายคนให้ทฤษฎีประเภทต่างๆตั้งแต่ยุคแรก ๆ แต่เท่านั้นJohannes Kepler (ค.ศ. 1571-1630) เป็นนักวิทยาศาสตร์ที่ได้รับการยอมรับมากที่สุดคนหนึ่งในการอธิบายหลักการของดาวเทียมที่เคลื่อนที่ไปรอบโลก
เคปเลอร์ได้กำหนดกฎหมาย 3 ฉบับที่เปลี่ยนแปลงทฤษฎีและการสังเกตการณ์การสื่อสารผ่านดาวเทียมทั้งหมด เหล่านี้เป็นที่รู้จักกันแพร่หลายว่าKepler’s laws. สิ่งเหล่านี้ช่วยให้เห็นภาพการเคลื่อนไหวผ่านอวกาศ
กฎข้อแรกของเคปเลอร์
กฎข้อแรกของ Kepler ระบุว่าเส้นทางตามด้วยดาวเทียมรอบ ๆ (พื้นโลก) หลักจะเป็น ellipse. วงรีนี้มีจุดโฟกัสสองจุด (โฟกัส) F1 และ F2 ดังแสดงในรูปด้านล่าง จุดศูนย์กลางมวลของโลกจะอยู่ที่จุดโฟกัสหนึ่งในสองจุดของวงรีเสมอ
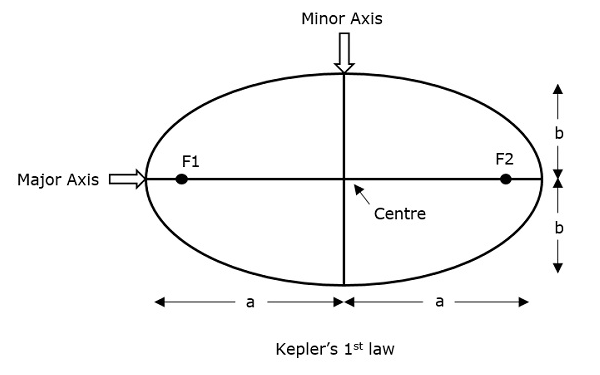
หากพิจารณาระยะทางจากจุดศูนย์กลางของวัตถุถึงจุดหนึ่งบนเส้นทางวงรีแล้วจุดที่ไกลที่สุดของวงรีจากจุดศูนย์กลางจะเรียกว่าเป็น apogee และจุดที่สั้นที่สุดของวงรีจากจุดศูนย์กลางเรียกว่าเป็น perigee.
Eccentricity "e" ของระบบนี้สามารถเขียนเป็น -
$$e = \frac{\sqrt{a^2 - b^2}}{a}$$
ที่ไหน a & b คือความยาวของแกนกึ่งหลักและแกนรองกึ่งหนึ่งของวงรีตามลำดับ
สำหรับ elliptical pathค่าของความเยื้องศูนย์ (e) จะอยู่ระหว่าง 0 ถึง 1 เสมอเช่น $0$ < $e$ < $1$เนื่องจาก a มากกว่า b สมมติว่าถ้าค่าของความเยื้องศูนย์ (e) เป็นศูนย์เส้นทางจะไม่อยู่ในรูปวงรีอีกต่อไป แต่จะถูกแปลงเป็นรูปวงกลม
กฎข้อที่สองของเคปเลอร์
กฎข้อที่สองของ Kepler ระบุว่าสำหรับช่วงเวลาที่เท่ากัน areaที่ครอบคลุมโดยดาวเทียมจะเหมือนกันกับจุดศูนย์กลางมวลของโลก สิ่งนี้สามารถเข้าใจได้โดยดูที่รูปต่อไปนี้
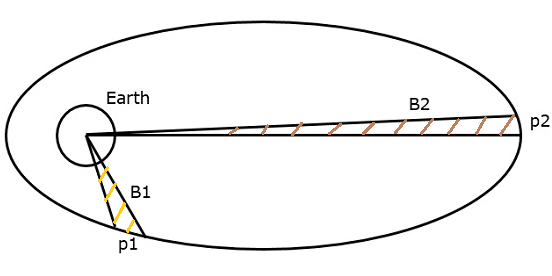
สมมติว่าดาวเทียมครอบคลุมระยะทาง p1 และ p2 ในช่วงเวลาเดียวกัน จากนั้นพื้นที่ B1 และ B2 ที่ครอบคลุมโดยดาวเทียมในสองอินสแตนซ์นั้นเท่ากัน
กฎข้อที่สามของเคปเลอร์
กฎข้อที่สามของเคปเลอร์ระบุว่ากำลังสองของช่วงเวลาของวงโคจรวงรีเป็นสัดส่วนกับลูกบาศก์ของความยาวแกนกึ่งเอกของมัน Mathematicallyสามารถเขียนได้ดังนี้ -
$$T^2\:\alpha\:a^3$$
$$=> T^2=\left(\frac{4\pi ^2}{\mu }\right) a^3$$
ที่ไหน $\frac{4\pi^2}{\mu}$ คือค่าคงที่ตามสัดส่วน
$\mu$คือค่าคงที่ของ Kepler และค่าเท่ากับ 3.986005 x 10 14 m 3 / วินาที2
$$1 = \left(\frac{2\pi}{T}\right)^2\left(\frac{a^2}{\mu}\right)$$
$$1 = n^2\left(\frac{a^3}{\mu}\right)$$
$$=> a^3 = \frac{\mu}{n^2}$$
ที่ไหน ‘n’ คือการเคลื่อนที่เฉลี่ยของดาวเทียมในหน่วยเรเดียนต่อวินาที
Note- ดาวเทียมเมื่อหมุนรอบโลกจะได้รับแรงดึงจากโลกซึ่งเป็นแรงดึงดูด ในทำนองเดียวกันมันได้รับแรงดึงจากดวงอาทิตย์และดวงจันทร์อีกครั้ง ดังนั้นดาวเทียมจึงต้องสร้างสมดุลให้กับพลังทั้งสองนี้เพื่อให้ตัวเองอยู่ในวงโคจร
ควรวางดาวเทียมในวงโคจรที่สอดคล้องกันหลังจากทิ้งไว้ในอวกาศ มันหมุนไปในลักษณะเฉพาะและตอบสนองวัตถุประสงค์ทางวิทยาศาสตร์การทหารหรือเชิงพาณิชย์ วงโคจรซึ่งกำหนดให้กับดาวเทียมที่เกี่ยวกับโลกเรียกว่าเป็นEarth Orbits. ดาวเทียมที่อยู่ในวงโคจรเหล่านั้นเรียกว่าEarth Orbit Satellites.
เราควรเลือกวงโคจรให้เหมาะสมสำหรับดาวเทียมตามข้อกำหนด ตัวอย่างเช่นหากวางดาวเทียมไว้lower orbitจากนั้นจะใช้เวลาน้อยลงในการเดินทางรอบโลกและกล้องออนบอร์ดจะมีความละเอียดที่ดีกว่า ในทำนองเดียวกันหากวางดาวเทียมไว้higher orbitจากนั้นจึงต้องใช้เวลามากขึ้นในการเดินทางรอบโลกและครอบคลุมพื้นผิวโลกมากขึ้นในคราวเดียว
ต่อไปนี้เป็นสามสิ่งที่สำคัญ types of Earth Orbit satellites -
- ดาวเทียมโคจรรอบโลกแบบ Geosynchronous
- ดาวเทียมวงโคจรของโลกขนาดกลาง
- ดาวเทียมวงโคจรต่ำของโลก
ตอนนี้ให้เราคุยกันเกี่ยวกับดาวเทียมวงโคจรโลกแต่ละประเภททีละดวง
Geosynchronous Earth OrbitSatellites
วงโคจรของโลกแบบ Geo-synchronous (GEO) Satellite เป็นหนึ่งซึ่งวางไว้ที่ระดับความสูง 22,300ไมล์เหนือพื้นโลก วงโคจรนี้ซิงโครไนซ์กับวันจริงด้านข้าง (เช่น 23 ชั่วโมง 56 นาที) วงโคจรนี้อาจมีความเอียงและความเยื้องศูนย์
มันอาจไม่เป็นวงกลม วงโคจรนี้สามารถเอียงที่ขั้วของโลกได้ แต่ดูเหมือนจะหยุดนิ่งเมื่อสังเกตจากพื้นโลก ดาวเทียมเหล่านี้ใช้สำหรับโทรทัศน์ดาวเทียม
วงโคจรทางภูมิศาสตร์ซิงโครนัสเดียวกันถ้าเป็นวงกลมและอยู่ในระนาบของเส้นศูนย์สูตรจะเรียกว่าเป็น Geostationary orbit. ดาวเทียมเหล่านี้ถูกวางไว้ที่ 35,900 กิโลเมตร (เช่นเดียวกับ Geosynchronous) เหนือเส้นศูนย์สูตรของโลกและพวกมันยังคงหมุนตามทิศทางของโลก (ตะวันตกไปตะวันออก)
ดาวเทียมที่อยู่ในวงโคจรเหล่านี้มีความเร็วเชิงมุมเช่นเดียวกับของโลก ดังนั้นดาวเทียมเหล่านี้จึงถือเป็นstationary สำหรับโลกเนื่องจากสิ่งเหล่านี้จะซิงโครไนซ์กับการหมุนของโลก
advantage ของวงโคจร Geostationary คือไม่จำเป็นต้องติดตามเสาอากาศเพื่อค้นหาตำแหน่งของดาวเทียม
ดาวเทียมโคจรรอบโลก Geostationary ใช้สำหรับการพยากรณ์อากาศทีวีดาวเทียมวิทยุดาวเทียมและการสื่อสารทั่วโลกประเภทอื่น ๆ
รูปต่อไปนี้แสดงความแตกต่างระหว่างวงโคจร Geo-synchronous และ Geo-stationary แกนของการหมุนบ่งบอกถึงการเคลื่อนที่ของโลก
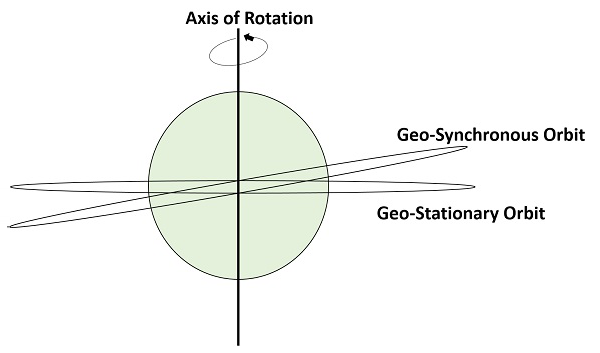
Note- วงโคจร Geostationary ทุกวงเป็นวงโคจร Geo-synchronous แต่การสนทนาไม่จำเป็นต้องเป็นจริง
ดาวเทียมวงโคจรของโลกขนาดกลาง
วงโคจรของโลกขนาดกลาง (MEO) ดาวเทียมจะโคจรในระยะทางประมาณ 8000 milesจากพื้นผิวโลก สัญญาณที่ส่งจากดาวเทียม MEO เดินทางในระยะทางสั้นกว่า ด้วยเหตุนี้ความแรงของสัญญาณที่จุดรับสัญญาณจึงดีขึ้น นี่แสดงให้เห็นว่าสามารถใช้ขั้วรับน้ำหนักขนาดเล็กและน้ำหนักเบาที่ปลายรับได้
Transmission delayสามารถกำหนดเป็นเวลาที่สัญญาณเดินทางขึ้นไปยังดาวเทียมและกลับลงไปที่สถานีรับสัญญาณ ในกรณีนี้มีความล่าช้าในการส่งน้อยกว่า เนื่องจากสัญญาณเดินทางไปและกลับจากดาวเทียม MEO เป็นระยะทางสั้นกว่า
สำหรับ real-time communicationsยิ่งความล่าช้าในการส่งข้อมูลสั้นลงระบบการสื่อสารก็จะยิ่งดีขึ้นเท่านั้น ตัวอย่างเช่นหากดาวเทียม GEO ต้องใช้เวลา 0.25 วินาทีในการเดินทางไปกลับดาวเทียม MEO จะใช้เวลาน้อยกว่า 0.1 วินาทีในการเดินทางครั้งเดียวกัน MEO ทำงานในช่วงความถี่ 2 GHz ขึ้นไป
ดาวเทียมเหล่านี้ใช้สำหรับสัญญาณโทรศัพท์ความเร็วสูง จำเป็นต้องมีดาวเทียม MEO สิบดวงขึ้นไปเพื่อให้ครอบคลุมทั้งโลก
ดาวเทียมวงโคจรต่ำของโลก
วงโคจรต่ำของโลก LEO)ดาวเทียมแบ่งออกเป็นสามประเภทหลัก ๆ สิ่งเหล่านี้คือ LEO เล็ก ๆ น้อย ๆ LEO ขนาดใหญ่และ Mega-LEO LEO จะโคจรในระยะทาง500 to 1000 milesเหนือพื้นผิวโลก ดาวเทียมเหล่านี้ใช้สำหรับโทรศัพท์ดาวเทียมและ GPS
ระยะทางที่ค่อนข้างสั้นนี้ช่วยลดความล่าช้าในการส่งข้อมูลเหลือเพียง 0.05 วินาที ซึ่งจะช่วยลดความจำเป็นในการใช้อุปกรณ์รับสัญญาณที่ละเอียดอ่อนและมีขนาดใหญ่ได้ จำเป็นต้องใช้ดาวเทียม LEO อย่างน้อยยี่สิบดวงเพื่อให้ครอบคลุมทั้งโลก
LEO ตัวน้อยจะทำงานในช่วง 800 MHz (0.8 GHz) LEO ขนาดใหญ่จะทำงานในช่วง 2 GHz หรือสูงกว่าและ Mega-LEO ทำงานในช่วง 20-30 GHz
ความถี่ที่สูงขึ้นที่เกี่ยวข้องกับ Mega-LEOs แปลเป็นความสามารถในการรับข้อมูลที่มากขึ้นและให้ผลตอบแทนตามความสามารถของรูปแบบการส่งวิดีโอแบบเรียลไทม์ที่มีความล่าช้าต่ำ
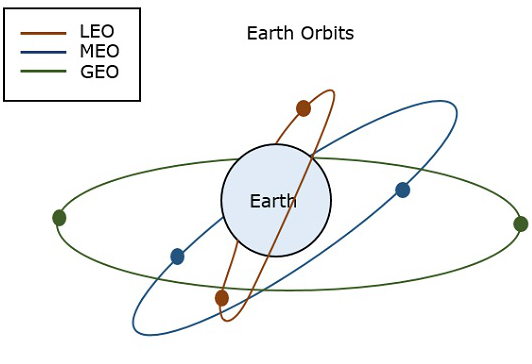
ดังต่อไปนี้ figure แสดงเส้นทางของ LEO, MEO และ GEO
สล็อตออร์บิทัล
ที่นี่อาจมีคำถามเกิดขึ้นโดยมีมากกว่า 200 satellites ที่อยู่ในวงโคจรแบบ geosynchronous เราจะป้องกันไม่ให้พวกมันวิ่งเข้าหากันหรือพยายามใช้ตำแหน่งเดียวกันในอวกาศได้อย่างไร?
เพื่อตอบปัญหานี้ (คำถาม) หน่วยงานกำกับดูแลระหว่างประเทศเช่นสหภาพโทรคมนาคมระหว่างประเทศ (ITU) และองค์กรของรัฐบาลระดับชาติเช่น Federal Communications Commission (FCC) กำหนดตำแหน่งบนวงโคจร geosynchronous ซึ่งสามารถระบุตำแหน่งของดาวเทียมสื่อสารได้
ตำแหน่งเหล่านี้ระบุเป็นองศาลองจิจูดและเรียกว่าเป็น orbital slots. FCC และ ITU ได้ลดระยะห่างที่ต้องการลงอย่างต่อเนื่องเหลือเพียง 2 องศาสำหรับดาวเทียม C-band และ Ku-band เนื่องจากความต้องการช่องวงโคจรอย่างมาก
สถานีภาคพื้นดินจะได้รับระดับสัญญาณสูงสุดหากตั้งอยู่ใต้ดาวเทียมโดยตรง มิฉะนั้นจะไม่ได้รับระดับสัญญาณสูงสุดและระดับสัญญาณจะลดลงเมื่อความแตกต่างระหว่างละติจูดและลองจิจูดของสถานีโลกเพิ่มขึ้น
ดังนั้นตามข้อกำหนดเราสามารถวางดาวเทียมในวงโคจรเฉพาะได้ ตอนนี้ให้เราพูดคุยเกี่ยวกับมุมมอง
ดูมุม
เสาอากาศของสถานีดินสองมุมต่อไปนี้รวมกันเรียกว่า look angles.
- มุม Azimuth
- มุมเงย
โดยทั่วไปค่าของมุมเหล่านี้จะเปลี่ยนไปสำหรับวงโคจรที่ไม่ใช่ geostationary ในขณะที่ค่าของมุมเหล่านี้ไม่เปลี่ยนแปลงสำหรับวงโคจร geostationary เนื่องจากดาวเทียมที่อยู่ในวงโคจร geostationary จึงปรากฏนิ่งเมื่อเทียบกับโลก
มุมทั้งสองนี้มีประโยชน์ในการชี้ไปที่ดาวเทียมโดยตรงจากเสาอากาศของสถานีภาคพื้นดิน ดังนั้นmaximum gain ของเสาอากาศสถานีดินสามารถส่งไปที่ดาวเทียม
เราทำได้ calculate มุมมองของวงโคจร geostationary โดยใช้ลองจิจูดและละติจูดของสถานีโลกและตำแหน่งของวงโคจรดาวเทียม
มุม Azimuth
มุมระหว่างระนาบแนวนอนท้องถิ่นกับเครื่องบินที่ผ่านสถานีโลกดาวเทียมและศูนย์กลางของโลกเรียกว่าเป็น azimuth angle.
formula สำหรับมุม Azimuth ($\alpha$) คือ
$$\alpha\: = 180^0 + Tan^{-1}\left(\frac{Tan G}{TanL}\right)$$
ที่ไหน
L คือละติจูดของเสาอากาศสถานีดิน
G คือความแตกต่างระหว่างตำแหน่งของวงโคจรของดาวเทียมและเสาอากาศของสถานีภาคพื้นดิน
ดังต่อไปนี้ figure แสดงมุมราบ

วัด horizontal angleที่เสาอากาศของสถานีดินถึงขั้วเหนือดังแสดงในรูป แสดงถึงมุมแอซิมัท ใช้เพื่อติดตามดาวเทียมในแนวนอน
มุมเงย
มุมระหว่างระนาบแนวตั้งและเส้นที่ชี้ไปยังดาวเทียมเรียกว่ามุมเงย ระนาบแนวตั้งไม่ใช่อะไรนอกจากระนาบซึ่งตั้งฉากกับระนาบแนวนอน
formula สำหรับมุมเงย ($\beta$) คือ
$$\beta = Tan^{-1}\left(\frac{cosG.cosL-0.15}{\sqrt{1-cos^2G.cos^2L}}\right)$$
เราสามารถคำนวณมุมเงยได้โดยใช้สูตรข้างต้น ดังต่อไปนี้figure แสดงมุมเงย

วัด vertical angleที่เสาอากาศสถานีดินจากพื้นถึงดาวเทียมดังแสดงในรูป แสดงถึงมุมเงย
การรบกวนของวงโคจร
ต่อไปนี้คือการก่อกวนของวงโคจรเนื่องจากแรงโน้มถ่วงและไม่ใช่แรงโน้มถ่วงหรือพารามิเตอร์
แรงโน้มถ่วงที่ไม่สม่ำเสมอรอบโลกเนื่องจากการกระจายมวลไม่สม่ำเสมอ สนามแม่เหล็กของโลกก็ทำให้เกิดการรบกวนของวงโคจรเช่นกัน
การรบกวนภายนอกหลักมาจากดวงอาทิตย์และดวงจันทร์ เมื่อดาวเทียมอยู่ใกล้กับร่างกายภายนอกเหล่านี้จะได้รับแรงดึงดูดที่แรงขึ้น
ดาวเทียมวงโคจรต่ำได้รับผลกระทบเนื่องจากแรงเสียดทานที่เกิดจากการชนกับอะตอมและไอออน
ความดันรังสีดวงอาทิตย์ส่งผลกระทบต่อดาวเทียม GEO ขนาดใหญ่ซึ่งใช้แผงเซลล์แสงอาทิตย์ขนาดใหญ่
แรงบิดและแรงกดดันที่สร้างขึ้นเองที่เกิดจากการแผ่รังสี RF จากเสาอากาศ
ดาวเทียมส่วนใหญ่ใช้ไฟล์ propulsion subsystem เพื่อรักษาทิศทางแกนหมุนที่เหมาะสมและควบคุมระดับความสูงของดาวเทียมจากแรงก่อกวน
ดาวเทียมอยู่ในอวกาศเกือบตลอดชีวิต เรารู้ว่าสภาพแวดล้อมของการไร้น้ำหนักมีอยู่ในอวกาศ นั่นเป็นเหตุผลที่ดาวเทียมไม่ต้องการเฟรมที่แข็งแกร่งเพิ่มเติมในอวกาศ แต่สิ่งเหล่านี้จำเป็นในระหว่างขั้นตอนการเปิดตัว เนื่องจากในกระบวนการดังกล่าวดาวเทียมจะสั่นอย่างรุนแรงจนกว่าดาวเทียมจะอยู่ในวงโคจรที่เหมาะสม
design of satellites ควรเข้ากันได้กับยานปล่อยอย่างน้อยหนึ่งลำเพื่อวางดาวเทียมในวงโคจร
เรารู้ว่าช่วงเวลาแห่งการปฏิวัติจะมีมากขึ้น apogeeระดับความสูงตามกฎข้อที่สองของ Kepler ระยะเวลาของวงโคจรการถ่ายเท geostationary เกือบเท่ากับ 16 ชั่วโมง ถ้าperigee เพิ่มขึ้นเป็นระดับความสูง GEO (ประมาณ 36,000 กม.) จากนั้นระยะเวลาของการปฏิวัติจะเพิ่มขึ้นเป็น 24 ชั่วโมง
การเปิดตัวดาวเทียม
กระบวนการวางดาวเทียมในวงโคจรที่เหมาะสมเรียกว่า launching process. ในระหว่างกระบวนการนี้จากสถานีภาคพื้นดินเราสามารถควบคุมการทำงานของดาวเทียมได้ โดยหลักแล้วการส่งดาวเทียมมีสี่ขั้นตอน
First Stage - ขั้นตอนแรกของยานปล่อยจรวดประกอบด้วยจรวดและเชื้อเพลิงสำหรับยกดาวเทียมพร้อมกับยานปล่อยขึ้นจากพื้นดิน
Second Stage- ยานปล่อยขั้นที่สองประกอบด้วยจรวดขนาดเล็ก สิ่งเหล่านี้จะถูกจุดหลังจากเสร็จสิ้นขั้นตอนแรก พวกเขามีถังเชื้อเพลิงของตัวเองเพื่อที่จะส่งดาวเทียมขึ้นสู่อวกาศ
Third Stage- ขั้นตอนที่สาม (บน) ของยานเปิดตัวเชื่อมต่อกับแฟริ่งดาวเทียม แฟริ่งนี้เป็นโล่โลหะซึ่งมีดาวเทียมและปกป้องดาวเทียม
Fourth Stage- ดาวเทียมถูกแยกออกจากขั้นตอนบนของยานปล่อยเมื่อมันมาถึงชั้นบรรยากาศของโลก จากนั้นดาวเทียมจะไปที่ "วงโคจรถ่ายโอน" วงโคจรนี้ส่งดาวเทียมขึ้นสู่อวกาศ
เมื่อดาวเทียมไปถึงระดับความสูงที่ต้องการของวงโคจรระบบย่อยของมันเช่นแผงโซลาร์เซลล์และเสาอากาศสื่อสารจะคลี่ออก จากนั้นดาวเทียมจะเข้าสู่ตำแหน่งในวงโคจรพร้อมกับดาวเทียมดวงอื่น ตอนนี้ดาวเทียมพร้อมให้บริการแล้วservices สู่สาธารณะ
ยานพาหนะปล่อยดาวเทียม
ยานปล่อยดาวเทียมปล่อยดาวเทียมขึ้นสู่วงโคจรเฉพาะตามข้อกำหนด ยานปล่อยดาวเทียมไม่ใช่แค่จรวดหลายสเตจ ต่อไปนี้คือไฟล์two types ของยานปล่อยดาวเทียม
- ยานพาหนะเปิดตัวที่สามารถใช้ได้ (ELV)
- รถเปิดตัวที่ใช้ซ้ำได้ (RLV)
ยานพาหนะเปิดตัวที่สามารถใช้ได้
ยานเปิดตัวที่สามารถใช้งานได้ (ELV) ถูกทำลายหลังจากออกจากดาวเทียมในอวกาศ ภาพต่อไปนี้แสดงให้เห็นว่า ELV มีลักษณะอย่างไร

ELV ประกอบด้วยสามขั้นตอน ขั้นตอนแรกและขั้นที่สองของ ELV จะยกระดับดาวเทียมขึ้นเป็นระยะทาง 50 ไมล์และ 100 ไมล์ ELV ขั้นที่สามวางดาวเทียมในวงโคจร งานของELV จะแล้วเสร็จและชิ้นส่วนอะไหล่จะตกลงสู่พื้นโลกเมื่อดาวเทียมมาถึงเพื่อถ่ายโอนวงโคจร
รถเปิดตัวที่ใช้ซ้ำได้
สามารถนำมาใช้ใหม่ได้ (RLV) multiple timesสำหรับการปล่อยดาวเทียม โดยทั่วไปยานปล่อยประเภทนี้จะกลับสู่พื้นโลกหลังจากออกจากดาวเทียมในอวกาศ
ภาพต่อไปนี้แสดงรถเปิดตัวที่ใช้ซ้ำได้ เป็นที่รู้จักกันในชื่อspace shuttle.

ฟังก์ชั่นของ space shuttleคล้ายกับฟังก์ชันของ ELV ขั้นแรกและขั้นที่สอง ดาวเทียมพร้อมกับกระสวยอวกาศขั้นที่สามติดตั้งอยู่ในช่องบรรทุกสินค้า มันถูกขับออกจากช่องบรรทุกสินค้าเมื่อกระสวยอวกาศถึงระดับความสูง 150 ถึง 200 ไมล์
จากนั้นกระสวยอวกาศขั้นที่สามจะถูกยิงและวางดาวเทียมเข้าสู่วงโคจร หลังจากนี้กระสวยอวกาศจะกลับสู่พื้นโลกเพื่อreuse.
ในระบบการสื่อสารผ่านดาวเทียมมีการดำเนินการต่างๆ ซึ่งการดำเนินการหลัก ได้แก่ การควบคุมวงโคจรระดับความสูงของดาวเทียมการตรวจสอบและควบคุมระบบย่อยอื่น ๆ
การสื่อสารผ่านดาวเทียมประกอบด้วยสองส่วนใหญ่ segments. นั่นคือส่วนของอวกาศและส่วนของโลก ดังนั้นจะมีระบบย่อยสองประเภท ได้แก่ ระบบย่อยส่วนของพื้นที่และระบบย่อยส่วนของโลก ดังต่อไปนี้figure แสดงแนวคิดนี้
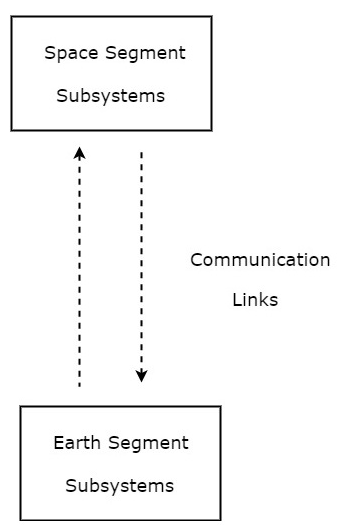
ดังแสดงในรูป communication เกิดขึ้นระหว่างระบบย่อยส่วนพื้นที่และระบบย่อยส่วนของโลกผ่านการเชื่อมโยงการสื่อสาร
ระบบย่อยของ Space Segment
ระบบย่อยที่อยู่ในส่วนของพื้นที่เรียกว่าเป็นระบบย่อยของส่วนพื้นที่ ต่อไปนี้คือไฟล์space segment subsystems.
- ระบบย่อย AOC
- ระบบย่อย TTCM
- ระบบย่อยไฟฟ้าและเสาอากาศ
- Transponders
ระบบย่อยของ Earth Segment
ระบบย่อยที่มีอยู่ในส่วนภาคพื้นดินมีความสามารถในการเข้าถึงดาวเทียมทวนสัญญาณเพื่อให้การสื่อสารระหว่างผู้ใช้ Earth segment เรียกอีกอย่างว่าส่วนกราวด์
ส่วนของโลกทำหน้าที่หลักสองอย่าง สิ่งเหล่านี้กำลังส่งสัญญาณไปยังดาวเทียมและการรับสัญญาณจากดาวเทียมEarth stations เป็นระบบย่อยที่สำคัญที่มีอยู่ในส่วนของโลก
เราจะพูดถึงระบบย่อยทั้งหมดของส่วนอวกาศและส่วนของโลกในบทต่อไปนี้
เราทราบดีว่าดาวเทียมอาจเบี่ยงเบนไปจากวงโคจรเนื่องจากแรงโน้มถ่วงจากดวงอาทิตย์ดวงจันทร์และดาวเคราะห์ดวงอื่น ๆ กองกำลังเหล่านี้เปลี่ยนแปลงไปตามวัฏจักรในช่วง 24 ชั่วโมงเนื่องจากดาวเทียมเคลื่อนที่ไปรอบโลก
การควบคุมระดับความสูงและวงโคจร (AOC)ระบบย่อยประกอบด้วยมอเตอร์จรวดซึ่งสามารถวางดาวเทียมเข้าสู่วงโคจรที่เหมาะสมเมื่อใดก็ตามที่มันเบี่ยงเบนไปจากวงโคจรตามลำดับ ระบบย่อย AOC มีประโยชน์ในการสร้างเสาอากาศซึ่งเป็นประเภทลำแสงแคบชี้เข้าหาโลก
เราสามารถทำให้ระบบย่อย AOC เป็นดังต่อไปนี้ two parts.
- ระบบย่อยควบคุมระดับความสูง
- ระบบย่อยการควบคุมวงโคจร
ตอนนี้ให้เราพูดคุยเกี่ยวกับระบบย่อยทั้งสองนี้ทีละระบบ
ระบบย่อยควบคุมระดับความสูง
ระบบย่อยควบคุมระดับความสูงดูแลทิศทางของดาวเทียมในวงโคจรตามลำดับ ต่อไปนี้คือไฟล์two methods เพื่อทำให้ดาวเทียมที่อยู่ในวงโคจรมีเสถียรภาพ
- หมุนดาวเทียม
- วิธีสามแกน
หมุนดาวเทียม
ด้วยวิธีนี้ร่างกายของดาวเทียมจะหมุนไปรอบ ๆ spin axis. โดยทั่วไปสามารถหมุนได้ที่ 30 ถึง 100 รอบต่อนาทีเพื่อสร้างแรงซึ่งเป็นประเภทไจโรสโคป ด้วยเหตุนี้แกนหมุนจึงได้รับความเสถียรและดาวเทียมจะชี้ไปในทิศทางเดียวกัน ดาวเทียมประเภทนี้เรียกว่าspinners.
สปินเนอร์ประกอบด้วยดรัมซึ่งมีรูปทรงกระบอก กลองนี้หุ้มด้วยแผงโซล่าเซลล์ ระบบไฟฟ้าและจรวดมีอยู่ในกลองนี้
ระบบย่อยการสื่อสารวางอยู่ด้านบนของดรัม มอเตอร์ไฟฟ้าขับเคลื่อนระบบสื่อสารนี้ ทิศทางของมอเตอร์นี้จะตรงข้ามกับการหมุนของตัวดาวเทียมเพื่อให้เสาอากาศชี้ไปที่พื้นโลก ดาวเทียมที่ดำเนินการในลักษณะนี้เรียกว่าde-spin.
ในช่วงเปิดตัวดาวเทียม spinsเมื่อใช้งานหัวฉีดก๊าซเรเดียลขนาดเล็ก หลังจากนี้ไฟล์de-spin ระบบทำงานเพื่อให้เสาอากาศระบบย่อย TTCM ชี้ไปที่สถานีดิน
วิธีสามแกน
ในวิธีนี้เราสามารถทำให้ดาวเทียมมีเสถียรภาพได้โดยใช้ล้อโมเมนตัมหนึ่งวงขึ้นไป วิธีนี้เรียกว่าthree-axis method. ข้อดีของวิธีนี้คือการวางแนวของดาวเทียมในสามแกนจะได้รับการควบคุมและไม่จำเป็นต้องหมุนตัวหลักของดาวเทียม
ด้วยวิธีนี้ดังต่อไปนี้ three axes ได้รับการพิจารณา
Roll axis พิจารณาในทิศทางที่ดาวเทียมเคลื่อนที่ในระนาบวงโคจร
Yaw axis ได้รับการพิจารณาในทิศทางที่มุ่งสู่โลก
Pitch axis พิจารณาในทิศทางซึ่งตั้งฉากกับระนาบวงโคจร
แกนทั้งสามนี้แสดงไว้ด้านล่าง figure.
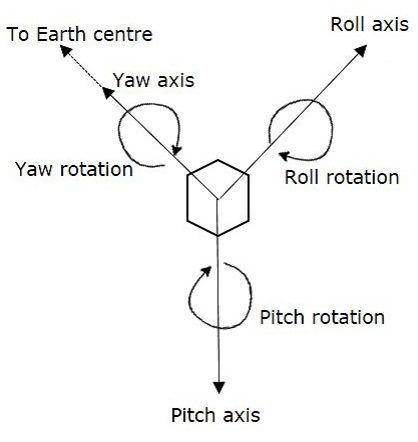
ให้ X R , Y Rและ Z Rเป็นแกนม้วนแกนหันเหและแกนพิทช์ตามลำดับ แกนทั้งสามนี้กำหนดโดยพิจารณาตำแหน่งของดาวเทียมเป็นreference. แกนทั้งสามนี้กำหนดระดับความสูงของดาวเทียม
ให้ X, Y และ Z เป็นแกนคาร์ทีเซียนอีกชุดหนึ่ง ชุดแกนสามแกนนี้ให้ข้อมูลเกี่ยวกับการวางแนวของดาวเทียมที่เกี่ยวกับแกนอ้างอิง หากมีการเปลี่ยนแปลงระดับความสูงของดาวเทียมมุมระหว่างแกนต่างๆจะเปลี่ยนไป
ในวิธีนี้แต่ละแกนจะมีไอพ่นก๊าซสองตัว พวกเขาจะให้การหมุนทั้งสองทิศทางของแกนสามแกน
first gas jet จะดำเนินการเป็นระยะเวลาหนึ่งเมื่อมีความต้องการของการเคลื่อนที่ของดาวเทียมในทิศทางแกนเฉพาะ
second gas jetจะดำเนินการในช่วงเวลาเดียวกันเมื่อดาวเทียมไปถึงตำแหน่งที่ต้องการ ดังนั้นแก๊สเจ็ทที่สองจะหยุดการเคลื่อนที่ของดาวเทียมในทิศทางแกนนั้น
ระบบย่อยการควบคุมวงโคจร
ระบบย่อยควบคุมวงโคจรมีประโยชน์ในการนำดาวเทียมเข้าสู่วงโคจรที่ถูกต้องเมื่อใดก็ตามที่ดาวเทียมเบี่ยงออกจากวงโคจร
ระบบย่อย TTCM ที่อยู่ที่สถานีพื้นโลกจะตรวจสอบตำแหน่งของดาวเทียม หากมีการเปลี่ยนแปลงใด ๆ ในวงโคจรดาวเทียมจะส่งสัญญาณเกี่ยวกับการแก้ไขไปยังระบบย่อยการควบคุมวงโคจร จากนั้นจะแก้ไขปัญหานั้นโดยการนำดาวเทียมเข้าสู่วงโคจรที่ถูกต้อง
ด้วยวิธีนี้ไฟล์ AOC subsystem ดูแลตำแหน่งดาวเทียมในวงโคจรที่ถูกต้องและในระดับความสูงที่เหมาะสมตลอดช่วงชีวิตทั้งหมดของดาวเทียมในอวกาศ
Telemetry การติดตามการบังคับบัญชาและการตรวจสอบ (TTCM)ระบบย่อยมีอยู่ทั้งในสถานีดาวเทียมและสถานีภาคพื้นดิน โดยทั่วไปดาวเทียมรับข้อมูลผ่านเซ็นเซอร์ ดังนั้นระบบย่อย Telemetry ที่มีอยู่ในดาวเทียมจะส่งข้อมูลนี้ไปยังสถานีภาคพื้นดิน ดังนั้นระบบย่อย TTCM จึงมีความจำเป็นอย่างมากสำหรับดาวเทียมสื่อสารใด ๆ เพื่อให้ทำงานได้สำเร็จ
เป็นความรับผิดชอบของผู้ปฏิบัติงานดาวเทียมในการควบคุมดาวเทียมในช่วงอายุการใช้งานหลังจากวางในวงโคจรที่เหมาะสม ซึ่งสามารถทำได้ด้วยความช่วยเหลือของTTCM subsystem.
เราสามารถทำให้ระบบย่อย TTCM เป็นดังต่อไปนี้ three parts.
- ระบบย่อย Telemetry และ Monitoring
- ติดตามระบบย่อย
- Commanding Subsystem
ระบบย่อย Telemetry และ Monitoring
คำ ‘Telemetry’หมายถึงการวัดที่ระยะทาง โดยหลักแล้วการดำเนินการต่อไปนี้จะเกิดขึ้นใน 'Telemetry'
การสร้างสัญญาณไฟฟ้าซึ่งเป็นสัดส่วนกับปริมาณที่จะวัด
การเข้ารหัสสัญญาณไฟฟ้า
การส่งรหัสนี้ไปยังระยะไกล
Telemetry subsystem ที่มีอยู่ในดาวเทียมทำหน้าที่หลักสองอย่าง -
- รับข้อมูลจากเซ็นเซอร์และ
- การส่งข้อมูลนั้นไปยังสถานีภาคพื้นดิน
ดาวเทียมมีเซ็นเซอร์ค่อนข้างน้อยเพื่อตรวจสอบพารามิเตอร์ต่างๆเช่นความดันอุณหภูมิสถานะและอื่น ๆ ของระบบย่อยต่างๆ โดยทั่วไปข้อมูลทางไกลจะถูกส่งเป็น FSK หรือ PSK
ระบบย่อย Telemetry เป็นระบบควบคุมระยะไกล ส่งข้อมูลการตรวจสอบจากดาวเทียมไปยังสถานีภาคพื้นดิน โดยทั่วไปไฟล์telemetry signals ดำเนินการข้อมูลที่เกี่ยวข้องกับระดับความสูงสภาพแวดล้อมและดาวเทียม
ติดตามระบบย่อย
ระบบย่อยการติดตามมีประโยชน์ในการทราบตำแหน่งของดาวเทียมและวงโคจรปัจจุบัน ศูนย์ควบคุมดาวเทียม(SCC)ตรวจสอบการทำงานและสถานะของระบบย่อยส่วนพื้นที่ด้วยความช่วยเหลือของดาวน์ลิงค์ telemetry และควบคุมระบบย่อยเหล่านั้นโดยใช้คำสั่งอัปลิงค์
เรารู้ว่า tracking subsystemยังมีอยู่ในสถานีภาคพื้นดิน ส่วนใหญ่มุ่งเน้นไปที่ระยะและมุมมองของดาวเทียม จำนวนเทคนิคที่ใช้เพื่อติดตามดาวเทียม สำหรับexampleการเปลี่ยนแปลงตำแหน่งวงโคจรของดาวเทียมสามารถระบุได้โดยใช้ข้อมูลที่ได้รับจากเซ็นเซอร์ความเร็วและความเร่งที่มีอยู่บนดาวเทียม
tracking subsystemที่มีอยู่ในสถานีภาคพื้นดินจะติดตามดาวเทียมเมื่อปล่อยจากขั้นตอนสุดท้ายของยานเปิดตัว มันทำหน้าที่เช่นการค้นหาตำแหน่งของดาวเทียมในวงโคจรเริ่มต้นและการถ่ายโอนวงโคจร
Commanding Subsystem
ระบบย่อยการบังคับบัญชาเป็นสิ่งที่จำเป็นในการส่งดาวเทียมขึ้นสู่วงโคจรและทำงานในวงโคจรนั้น ระบบย่อยนี้จะปรับระดับความสูงและวงโคจรของดาวเทียมเมื่อใดก็ตามที่ค่าเหล่านั้นเบี่ยงเบน นอกจากนี้ยังควบคุมระบบย่อยการสื่อสาร นี้commanding subsystem มีหน้าที่ในการเปิด / ปิดระบบย่อยอื่น ๆ ที่มีอยู่ในดาวเทียมโดยอาศัยข้อมูลที่ได้รับจาก telemetry และติดตามระบบย่อย
โดยทั่วไปรหัสควบคุมจะถูกแปลงเป็นคำสั่ง คำสั่งเหล่านี้ใช้เพื่อส่งในรูปแบบTDM frames. ในขั้นต้นความถูกต้องของคำสั่งจะถูกตรวจสอบในดาวเทียม หลังจากนี้คำสั่งเหล่านี้สามารถส่งกลับไปยังสถานีภาคพื้นดินได้ ที่นี่คำสั่งเหล่านี้จะถูกตรวจสอบอีกครั้ง
หากสถานีภาคพื้นดินได้รับคำสั่ง (ที่ถูกต้อง) เหมือนกันก็จะส่งคำสั่งดำเนินการไปยังดาวเทียม ดังนั้นจึงเรียกใช้คำสั่งนั้น
ฟังก์ชันการทำงานที่ชาญฉลาดระบบย่อย Telemetry และระบบย่อยคำสั่งอยู่ตรงข้ามกัน เนื่องจากดวงแรกส่งข้อมูลของดาวเทียมไปยังสถานีภาคพื้นดินและดวงที่สองรับสัญญาณคำสั่งจากสถานีภาคพื้นดิน
ในบทนี้ให้เราพิจารณาเกี่ยวกับ Power systems ซึ่งระบบย่อยต่างๆของดาวเทียมได้รับพลังงานและ Antenna subsystems ทีละคน.
ระบบไฟฟ้า
เราทราบดีว่าดาวเทียมที่อยู่ในวงโคจรควรทำงานอย่างต่อเนื่องตลอดช่วงชีวิต ดังนั้นดาวเทียมจึงต้องใช้พลังงานภายในเพื่อใช้งานระบบอิเล็กทรอนิกส์และน้ำหนักบรรทุกการสื่อสารต่างๆที่มีอยู่ในนั้น
Power systemเป็นระบบย่อยที่สำคัญซึ่งให้พลังงานที่จำเป็นสำหรับการทำงานของดาวเทียม โดยหลักแล้วเซลล์แสงอาทิตย์ (หรือแผง) และแบตเตอรี่แบบชาร์จได้จะใช้ในระบบเหล่านี้
พลังงานแสงอาทิตย์
โดยทั่วไปแล้วไฟล์ solar cellsผลิตพลังงานไฟฟ้า (กระแส) จากแสงแดดที่ตกกระทบ ดังนั้นเซลล์แสงอาทิตย์จึงถูกใช้เป็นหลักเพื่อให้พลังงานแก่ระบบย่อยอื่น ๆ ของดาวเทียม
เราทราบดีว่าเซลล์แสงอาทิตย์แต่ละเซลล์สร้างพลังงานได้น้อยมาก ดังนั้นเพื่อสร้างพลังงานให้มากขึ้นสามารถใช้กลุ่มเซลล์ที่มีอยู่ในรูปแบบอาร์เรย์ได้
แผงเซลล์แสงอาทิตย์
มีสอง types of solar arraysที่ใช้ในดาวเทียม สิ่งเหล่านี้คือแผงเซลล์แสงอาทิตย์ทรงกระบอกและแผงเซลล์แสงอาทิตย์รูปสี่เหลี่ยมผืนผ้าหรือใบเรือพลังงานแสงอาทิตย์
Cylindrical solar arraysใช้ในการหมุนดาวเทียม เฉพาะบางส่วนของอาร์เรย์ทรงกระบอกเท่านั้นที่จะถูกปกคลุมภายใต้แสงแดดในช่วงเวลาใดเวลาหนึ่ง ด้วยเหตุนี้พลังงานไฟฟ้าจึงถูกสร้างขึ้นจากแผงโซลาร์เซลล์บางส่วน นี่คือข้อเสียเปรียบของประเภทนี้
ข้อเสียเปรียบของแผงเซลล์แสงอาทิตย์ทรงกระบอกสามารถเอาชนะได้ด้วย Solar sail. สิ่งนี้ผลิตพลังงานได้มากกว่าเนื่องจากเซลล์แสงอาทิตย์ทั้งหมดของใบเรือพลังงานแสงอาทิตย์สัมผัสกับแสงจากดวงอาทิตย์
แบตเตอรี่แบบชาร์จไฟได้
ในช่วงเวลาสุริยุปราคาเป็นเรื่องยากที่จะได้รับพลังจากแสงดวงอาทิตย์ ดังนั้นในสถานการณ์นั้นระบบย่อยอื่น ๆ จะได้รับพลังจากrechargeable batteries. แบตเตอรี่เหล่านี้ผลิตพลังงานให้กับระบบย่อยอื่น ๆ ในระหว่างการปล่อยดาวเทียมด้วย
โดยทั่วไปแบตเตอรี่เหล่านี้จะชาร์จเนื่องจากกระแสไฟฟ้าเกินซึ่งเกิดจากเซลล์แสงอาทิตย์ในที่ที่มีแสงจากดวงอาทิตย์
ระบบย่อยเสาอากาศ
เสาอากาศมีอยู่ทั้งในสถานีดาวเทียมและสถานีภาคพื้นดิน ตอนนี้ให้เราพูดคุยเกี่ยวกับเสาอากาศดาวเทียม
เสาอากาศดาวเทียมดำเนินการ two typesของฟังก์ชัน สิ่งเหล่านี้กำลังรับสัญญาณซึ่งมาจากสถานีภาคพื้นดินและส่งสัญญาณไปยังสถานีภาคพื้นดินอย่างน้อยหนึ่งแห่งตามข้อกำหนด กล่าวอีกนัยหนึ่งเสาอากาศดาวเทียมรับสัญญาณอัปลิงค์และส่งสัญญาณดาวน์ลิงค์
เราทราบดีว่าความยาวของเสาอากาศรับสัญญาณดาวเทียมนั้นแปรผกผันกับความถี่ในการทำงาน ต้องเพิ่มความถี่ในการทำงานเพื่อลดความยาวของเสาอากาศรับสัญญาณดาวเทียม ดังนั้นเสาอากาศดาวเทียมจึงทำงานตามลำดับGHz ความถี่.
เสาอากาศดาวเทียม
เสาอากาศที่ใช้ในดาวเทียมเรียกว่าเสาอากาศดาวเทียม ส่วนใหญ่มีสี่types of Antennas. พวกเขาเป็น:
- สายอากาศ
- เสาอากาศฮอร์น
- อาร์เรย์เสาอากาศ
- เสาอากาศสะท้อนแสง
ตอนนี้ให้เราพูดคุยเกี่ยวกับเสาอากาศเหล่านี้ทีละตัว
สายอากาศ
สายอากาศเป็นเสาอากาศพื้นฐาน Mono pole และ dipole antennasมาอยู่ในหมวดหมู่นี้ ใช้ในความถี่ที่สูงมากเพื่อให้การสื่อสารสำหรับระบบย่อย TTCM
ความยาวของเส้นลวดทั้งหมดซึ่งใช้เป็นไดโพลถ้าเท่ากับครึ่งหนึ่งของความยาวคลื่น (เช่น l = λ / 2) เสาอากาศดังกล่าวเรียกว่า half-wave dipole antenna.
Wire antennasเหมาะสำหรับครอบคลุมช่วงการเข้าถึงและให้ความแรงของสัญญาณในทุกทิศทาง นั่นหมายความว่าเสาอากาศแบบลวดเป็นเสาอากาศรอบทิศทาง
เสาอากาศฮอร์น
เสาอากาศที่มีรูรับแสงในตอนท้ายสามารถเรียกได้ว่าเป็นไฟล์ Aperture antenna. ขอบของสายส่งไฟฟ้าเมื่อสิ้นสุดด้วยการเปิดจะแผ่พลังงานออกมา ช่องนี้ซึ่งเป็นรูรับแสงทำให้เป็นเสาอากาศแบบรูรับแสง
Horn antennaเป็นตัวอย่างของเสาอากาศรูรับแสง ใช้ในดาวเทียมเพื่อให้ครอบคลุมพื้นที่บนโลกมากขึ้น
ใช้เสาอากาศฮอร์น microwaveช่วงความถี่ ฟีดฮอร์นเดียวกันสามารถใช้สำหรับการส่งและรับสัญญาณ อุปกรณ์ชื่อ duplexer ซึ่งแยกสัญญาณทั้งสองนี้
อาร์เรย์เสาอากาศ
เสาอากาศเมื่อแยกกันสามารถแผ่พลังงานจำนวนหนึ่งไปในทิศทางใดทิศทางหนึ่งซึ่งส่งผลให้การส่งผ่านข้อมูลดีขึ้นจะเป็นอย่างไรหากมีการเพิ่มองค์ประกอบอื่น ๆ เข้าไปเพื่อให้ได้ผลผลิตที่มีประสิทธิภาพ มันเป็นความคิดนี้เองที่นำไปสู่การประดิษฐ์Array Antennasหรืออาร์เรย์เสาอากาศ เสาอากาศอาร์เรย์ใช้ในดาวเทียมเพื่อสร้างลำแสงหลายอันจากรูรับแสงเดียว

เสาอากาศสะท้อนแสง

เสาอากาศสะท้อนแสงเหมาะสำหรับการผลิตคานซึ่งมีความแรงของสัญญาณมากกว่าในทิศทางเดียว นั่นหมายความว่าเสาอากาศเหล่านี้เป็นเสาอากาศที่มีทิศทางสูง ดังนั้น,Parabolic reflectorsเพิ่มการรับเสาอากาศในระบบสื่อสารดาวเทียม ดังนั้นจึงใช้ในการสื่อสารโทรคมนาคมและการกระจายเสียง
หากใช้เสาอากาศ Parabolic Reflector สำหรับ transmittingสัญญาณสัญญาณจากฟีดออกมาจากไดโพลหรือเสาอากาศฮอร์นเพื่อโฟกัสคลื่นไปที่พาราโบลา นั่นหมายความว่าคลื่นจะออกมาจากจุดโฟกัสและกระทบกับตัวสะท้อนแสง Paraboloidal ตอนนี้คลื่นนี้ได้รับการสะท้อนเป็นคลื่นด้านหน้า
หากใช้เสาอากาศเดียวกันเป็นไฟล์ receiverคลื่นแม่เหล็กไฟฟ้าเมื่อกระทบรูปร่างของพาราโบลาคลื่นจะสะท้อนไปยังจุดป้อน ไดโพลหรือเสาอากาศฮอร์นซึ่งทำหน้าที่เป็นเสาอากาศรับที่ฟีดรับสัญญาณนี้เพื่อแปลงเป็นสัญญาณไฟฟ้าและส่งต่อไปยังวงจรรับ
ระบบย่อยซึ่งให้การเชื่อมโยงระหว่างการส่งและรับเสาอากาศของดาวเทียมเรียกว่า Transponder. เป็นระบบย่อยที่สำคัญที่สุดระบบหนึ่งของระบบย่อยส่วนอวกาศ
Transponder ทำหน้าที่ของทั้งตัวส่งและตัวรับ (Responder) ในดาวเทียม ดังนั้นคำว่า 'Transponder' จึงได้มาจากการรวมตัวอักษรสองสามคำเข้าด้วยกันคือ Transmitter(Trans) และ Responder (ponder).
แผนภาพบล็อกของ Transponder
Transponder ทำหน้าที่เป็นหลัก two functions. สิ่งเหล่านี้กำลังขยายสัญญาณอินพุตที่ได้รับและแปลความถี่ของมัน โดยทั่วไปจะมีการเลือกค่าความถี่ที่แตกต่างกันสำหรับทั้งอัปลิงค์และลิงค์ลงเพื่อหลีกเลี่ยงการรบกวนระหว่างสัญญาณที่ส่งและรับ
block diagram ของช่องสัญญาณดังแสดงในรูปด้านล่าง
เราสามารถเข้าใจการทำงานของ Transponder ได้อย่างง่ายดายจากบล็อกไดอะแกรมเอง ฟังก์ชันของแต่ละบล็อกจะกล่าวถึงด้านล่าง
Duplexerเป็นประตูไมโครเวฟสองทาง รับสัญญาณอัปลิงค์จากเสาอากาศดาวเทียมและส่งสัญญาณดาวน์ลิงค์ไปยังเสาอากาศดาวเทียม
Low Noise Amplifier (LNA) ขยายสัญญาณที่ได้รับอ่อน
Carrier Processorดำเนินการแปลงความถี่ลงของสัญญาณที่ได้รับ (อัปลิงค์) บล็อกนี้กำหนดประเภทของทรานสปอนเดอร์
Power Amplifier ขยายพลังของสัญญาณที่แปลงความถี่ลง (ลิงค์ลง) ไปยังระดับที่ต้องการ
ประเภทของทรานสปอนเดอร์
โดยทั่วไปมี two typesของช่องสัญญาณ สิ่งเหล่านี้คือทรานสปอนเดอร์ท่องอและทรานสปอนเดอร์ Regenerative
ท่อรับส่งสัญญาณแบบงอ
ทรานสปอนเดอร์แบบท่องอรับสัญญาณความถี่ไมโครเวฟ จะแปลงความถี่ของสัญญาณอินพุตเป็นความถี่ RF แล้วขยายสัญญาณ
ทรานสปอนเดอร์ท่องอเรียกอีกอย่างว่าทวนและ conventional transponder. เหมาะสำหรับทั้งสัญญาณอนาล็อกและดิจิตอล
Regenerative Transponders
Regenerative transponder ทำหน้าที่ของช่องรับสัญญาณแบบ Bent pipe กล่าวคือการแปลความถี่และการขยายสัญญาณ นอกเหนือจากฟังก์ชั่นทั้งสองนี้แล้ว Regenerative transponder ยังทำการ demodulation ของ RF carrier ไปยัง baseband การสร้างสัญญาณและการมอดูเลตอีกครั้ง
Regenerative transponder เรียกอีกอย่างว่า Processing transponder เหมาะสำหรับสัญญาณดิจิตอลเท่านั้น หลักadvantages ของทรานสปอนเดอร์ Regenerative กำลังปรับปรุง Signal to Noise Ratio (SNR) และมีความยืดหยุ่นในการนำไปใช้งานมากขึ้น
earth segmentของระบบการสื่อสารผ่านดาวเทียมส่วนใหญ่ประกอบด้วยสถานีดินสองแห่ง พวกนี้กำลังส่งสถานีดินและรับสถานีดิน
การส่งสัญญาณ earth stationส่งสัญญาณข้อมูลไปยังดาวเทียม ในขณะที่สถานีภาคพื้นดินรับสัญญาณจะรับสัญญาณข้อมูลจากดาวเทียม บางครั้งสถานีดินเดียวกันสามารถใช้เพื่อวัตถุประสงค์ในการส่งและรับ
โดยทั่วไปสถานีภาคพื้นดินจะรับสัญญาณเบสแบนด์ในรูปแบบใดรูปแบบหนึ่งต่อไปนี้ สัญญาณเสียงและสัญญาณวิดีโอทั้งในรูปแบบแอนะล็อกหรือรูปแบบดิจิทัล
ในขั้นต้นเทคนิคการมอดูเลตแบบอะนาล็อกชื่อ FM modulationใช้สำหรับการส่งสัญญาณทั้งเสียงและวิดีโอซึ่งอยู่ในรูปแบบแอนะล็อก ต่อมาคือเทคนิคการมอดูเลตแบบดิจิทัล ได้แก่ Frequency Shift Keying(FSK) และ Phase Shift Keying (PSK)ใช้สำหรับส่งสัญญาณเหล่านั้น เนื่องจากสัญญาณเสียงและสัญญาณวิดีโอถูกใช้เพื่อแสดงในรูปแบบดิจิทัลโดยการแปลงสัญญาณจากอนาล็อก
แผนภาพบล็อกของสถานีดิน
การออกแบบไฟล์ Earth stationไม่เพียงขึ้นอยู่กับที่ตั้งของสถานีดินเท่านั้น แต่ยังขึ้นอยู่กับปัจจัยอื่น ๆ ด้วย ที่ตั้งของสถานีภาคพื้นดินอาจอยู่บนบกบนเรือในทะเลและบนเครื่องบิน ปัจจัยที่ขึ้นอยู่ ได้แก่ ประเภทของการให้บริการการใช้คลื่นความถี่ลักษณะตัวส่งตัวรับและเสาอากาศ
block diagram ของสถานีดินดิจิตอลแสดงไว้ในรูปด้านล่าง

เราสามารถเข้าใจการทำงานของสถานีดินได้อย่างง่ายดายจากรูปด้านบน มีสี่รายใหญ่subsystemsที่มีอยู่ในสถานีดินใด ๆ นั่นคือเครื่องส่งสัญญาณเครื่องรับเสาอากาศและระบบย่อยการติดตาม
เครื่องส่ง
ข้อมูลไบนารี (ดิจิทัล) จะเข้าสู่อุปกรณ์แบนด์ฐานของสถานีภาคพื้นดินจากเครือข่ายภาคพื้นดิน Encoder รวมบิตแก้ไขข้อผิดพลาดเพื่อลดอัตราความผิดพลาดของบิต
ในการสื่อสารผ่านดาวเทียมความถี่กลาง (IF)สามารถเลือกเป็น 70 MHz โดยใช้ทรานสปอนเดอร์ที่มีแบนด์วิดท์ 36 MHz ในทำนองเดียวกัน IF สามารถเลือกเป็น 140 MHz ได้โดยใช้ทรานสปอนเดอร์ที่มีแบนด์วิดท์ 54 MHz หรือ 72 MHz
Up converter ทำการแปลงความถี่ของสัญญาณมอดูเลตเป็นความถี่ที่สูงขึ้น สัญญาณนี้จะถูกขยายโดยใช้เครื่องขยายเสียงกำลังสูง เสาอากาศของสถานีภาคพื้นดินส่งสัญญาณนี้
ผู้รับ
ระหว่าง receptionเสาอากาศของสถานีภาคพื้นดินรับสัญญาณดาวน์ลิงค์ นี่คือสัญญาณ RF แบบมอดูเลตระดับต่ำ โดยทั่วไปสัญญาณที่ได้รับจะมีความแรงของสัญญาณน้อย ดังนั้นเพื่อขยายสัญญาณนี้ Low Noise Amplifier(LNA)ถูกนำมาใช้. ด้วยเหตุนี้จึงมีการปรับปรุงค่า Signal to Noise Ratio (SNR)
สัญญาณ RF สามารถ down convertedเป็นค่า Intermediate Frequency (IF) ซึ่งเป็น 70 หรือ 140 MHz เพราะมันง่ายที่จะ demodulate ที่ความถี่กลางเหล่านี้
ฟังก์ชั่นของ decoderตรงข้ามกับตัวเข้ารหัส ดังนั้นตัวถอดรหัสจึงสร้างข้อมูลไบนารีที่ปราศจากข้อผิดพลาดโดยการลบบิตการแก้ไขข้อผิดพลาดและแก้ไขตำแหน่งบิตหากมี
ข้อมูลไบนารีนี้มอบให้กับอุปกรณ์แบนด์ฐานสำหรับการประมวลผลเพิ่มเติมจากนั้นส่งไปยังเครือข่ายภาคพื้นดิน
เสาอากาศสถานีดิน
ส่วนสำคัญของ Earth station Antennaคือระบบฟีดและตัวสะท้อนเสาอากาศ ทั้งสองส่วนนี้รวมกันจะแผ่หรือรับคลื่นแม่เหล็กไฟฟ้า เนื่องจากระบบฟีดเป็นไปตามทฤษฎีบทซึ่งกันและกันเสาอากาศของสถานีดินจึงเหมาะสำหรับทั้งการส่งและรับคลื่นแม่เหล็กไฟฟ้า
Parabolic reflectorsใช้เป็นเสาอากาศหลักในสถานีภาคพื้นดิน การได้รับของตัวสะท้อนแสงเหล่านี้สูง พวกมันมีความสามารถในการโฟกัสลำแสงคู่ขนานไปยังจุดที่โฟกัสซึ่งเป็นที่ตั้งของระบบฟีด
ติดตามระบบย่อย
Tracking subsystemติดตามดาวเทียมและตรวจสอบให้แน่ใจว่าลำแสงพุ่งเข้าหาเพื่อสร้างการสื่อสาร ระบบติดตามที่มีอยู่ในสถานีภาคพื้นดินดำเนินการเป็นหลักtwo functions. สิ่งเหล่านี้คือการจัดหาดาวเทียมและการติดตามดาวเทียม การติดตามนี้สามารถทำได้ด้วยวิธีใดวิธีหนึ่งดังต่อไปนี้ นั่นคือการติดตามอัตโนมัติการติดตามด้วยตนเองและการติดตามโปรแกรม
ในบทนี้ขอให้เราพิจารณาตัวอย่างของสถานีบนดินสองตัวอย่าง: Receive-only Home TV system และ Community Antenna TV system.
รับเฉพาะระบบทีวีที่บ้าน
หากการแพร่ภาพเกิดขึ้นโดยตรงไปยังเครื่องรับโทรทัศน์ที่บ้านบริการประเภทนั้นจะเรียกว่า Direct Broadcast Satellite (DBS) บริการ.
สามารถใช้ตัวสะท้อนแสงชนิดตาข่ายสำหรับการโฟกัสสัญญาณไปยังไฟล์ dual feed-horn. มีสองเอาต์พุตแยกกัน จากเอาต์พุตหนึ่งจะได้รับสัญญาณ C-band และจากเอาต์พุตอื่น ๆ จะได้รับสัญญาณ Ku-band
รายการโทรทัศน์ส่วนใหญ่มาจากสัญญาณรุ่นแรก สัญญาณเหล่านี้ส่งผ่านดาวเทียมไปยังสถานีปลายทางหลักของเครือข่ายในแถบ C สัญญาณเหล่านี้ถูกบีบอัดและส่งในรูปแบบดิจิทัลไปยังผู้ให้บริการเคเบิลและ DBS
ผู้ใช้ C-band สามารถสมัครรับช่องทีวีแบบเสียเงินได้ บริการสมัครสมาชิกเหล่านี้คือcheaper เมื่อเปรียบเทียบกับสายเคเบิลเนื่องจากความพร้อมใช้งานของการเขียนโปรแกรมหลายแหล่ง
block diagram ของเครื่องรับโทรทัศน์ DBS แสดงดังรูปด้านล่าง
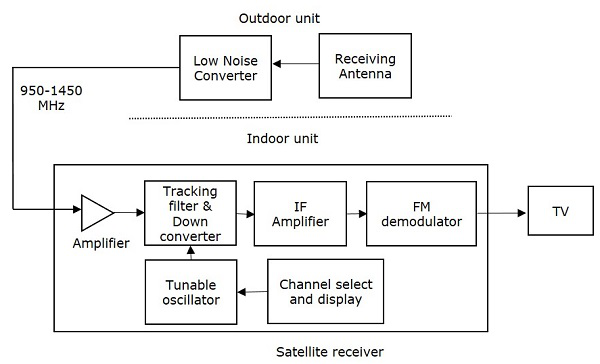
หน่วยกลางแจ้ง
หน่วยกลางแจ้งส่วนใหญ่ประกอบด้วย receiving antenna และตัวแปลงสัญญาณรบกวนต่ำ (LNC). ตัวแปลงสัญญาณรบกวนต่ำ (LNC) เป็นเพียงการรวมกันของ Low Noise Amplifier (LNA) ตามด้วยตัวแปลง เสาอากาศรับจะถูกป้อนเข้าสู่ LNC โดยตรง
โดยทั่วไปแล้วไฟล์ parabolic reflector ยังใช้กับเสาอากาศรับสัญญาณฮอร์นเพื่อโฟกัสลำแสงได้มากขึ้น
หน่วยในร่ม
โดยทั่วไปสัญญาณที่ป้อนไปยังหน่วยในร่มเป็นสัญญาณแบบไวด์แบนด์ ความถี่ของสัญญาณนี้อยู่ระหว่าง 950 MHz ถึง 1450 MHz ในหน่วยในร่มสัญญาณนี้จะขยายโดยใช้ไฟล์amplifier.
สัญญาณขยายถูกนำไปใช้กับตัวกรองการติดตามและตัวแปลงดาวน์ เลือกช่องสัญญาณที่ต้องการและแปลงความถี่เป็นไฟล์Intermediate Frequency (IF) ที่ 70 MHz.
IF amplifierขยายความแรงของสัญญาณเพื่อแยกสัญญาณออกอย่างเหมาะสม สัญญาณเบสแบนด์ (demodulated) ใช้เพื่อสร้างสัญญาณ Vestigial Single Side Band (VSSB) สัญญาณนี้ถูกป้อนเข้าไปในช่อง VHF / UHF ช่องหนึ่งของเครื่องทีวีมาตรฐาน
การมอดูเลตความถี่ (FM) ใช้ใน DBS TV ในขณะที่ Amplitude Modulation (AM) ในรูปแบบ VSSB ใช้ในทีวีทั่วไป นี้เป็นmajor difference ระหว่าง DBS TV และทีวีทั่วไป
ระบบเสาอากาศทีวีชุมชน
ทีวีเสาอากาศชุมชน (CATV)ระบบใช้หน่วยกลางแจ้งเดียวและหลายฟีด ฟีดเหล่านี้มีจำหน่ายแยกกันสำหรับแต่ละความรู้สึกของโพลาไรซ์ ด้วยเหตุนี้ช่องทั้งหมดจะพร้อมใช้งานที่เครื่องรับสัญญาณภายในอาคารพร้อมกัน
block diagram หน่วยภายในของระบบ CATV แสดงดังรูปด้านล่าง
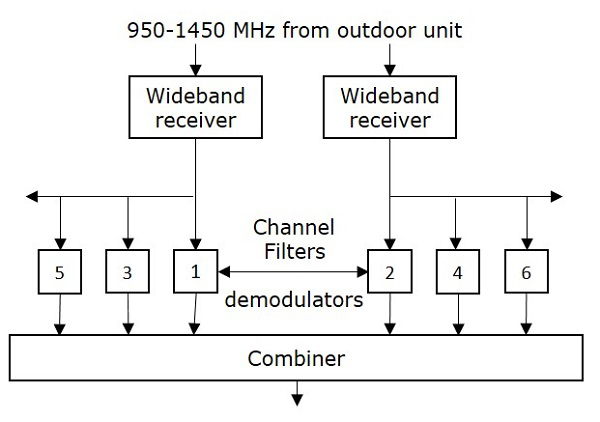
ในกรณีนี้ผู้ใช้แต่ละคนไม่จำเป็นต้องใช้ตัวรับสัญญาณแยกกัน เนื่องจากผู้ให้บริการทั้งหมดถูก demodulated ในระบบตัวกรองตัวรับทั่วไป หลังจากนั้นช่องจะรวมกันเป็นสัญญาณมัลติเพล็กซ์ จากนั้นสัญญาณนี้จะถูกส่งผ่านสายเคเบิลไปยังสมาชิก (ผู้ใช้)
ในระบบการสื่อสารผ่านดาวเทียมมีการคำนวณกำลังสองประเภท กำลังส่งและรับการคำนวณกำลัง โดยทั่วไปการคำนวณเหล่านี้เรียกว่าLink budget calculations. หน่วยของกำลังคือdecibel.
ขั้นแรกให้เราพูดถึงคำศัพท์พื้นฐานที่ใช้ใน Link Budget จากนั้นเราจะไปอธิบายการคำนวณ Link Budget
คำศัพท์พื้นฐาน
อัน isotropic radiator(เสาอากาศ) แผ่กระจายอย่างเท่าเทียมกันในทุกทิศทาง แต่มันไม่มีอยู่จริง มันเป็นเพียงเสาอากาศตามทฤษฎี เราสามารถเปรียบเทียบประสิทธิภาพของเสาอากาศจริง (ในทางปฏิบัติ) ทั้งหมดกับเสาอากาศนี้
ความหนาแน่นของฟลักซ์กำลัง
สมมติว่าหม้อน้ำ isotropic ตั้งอยู่ที่ศูนย์กลางของทรงกลมที่มีรัศมี r เราทราบดีว่าความหนาแน่นของฟลักซ์กำลังคืออัตราส่วนของการไหลของกำลังและพื้นที่หน่วย
Power flux density,$\Psi_i$ ของหม้อน้ำ isotropic คือ
$$\Psi_i = \frac{p_s}{4\pi r^2}$$
ที่ไหน $P_s$คือกระแสไฟ โดยทั่วไปความหนาแน่นของฟลักซ์กำลังของเสาอากาศที่ใช้งานได้จริงจะแตกต่างกันไปตามทิศทาง แต่มันmaximum value จะเป็นไปในทิศทางเดียวเท่านั้น
กำไรเสาอากาศ
gain ของเสาอากาศที่ใช้งานได้จริงถูกกำหนดให้เป็นอัตราส่วนของความหนาแน่นของฟลักซ์กำลังสูงสุดของเสาอากาศที่ใช้งานได้จริงและความหนาแน่นของฟลักซ์กำลังของเสาอากาศไอโซโทรปิก
ดังนั้นกำไรของเสาอากาศหรือ Antenna gain, G คือ
$$G = \frac{\Psi_m}{\Psi_i}$$
ที่ไหน $\Psi_m$คือความหนาแน่นของฟลักซ์กำลังสูงสุดของเสาอากาศที่ใช้งานได้จริง และ,$\Psi_i$ คือความหนาแน่นของฟลักซ์กำลังของหม้อน้ำไอโซโทรปิก (เสาอากาศ)
กำลังการแผ่รังสีไอโซโทปเทียบเท่า
กำลังการแผ่รังสีไอโซโทรปิกเทียบเท่า (EIRP) เป็นพารามิเตอร์หลักที่ใช้ในการวัดงบประมาณการเชื่อมโยง Mathematicallyสามารถเขียนเป็น
$$EIRP = G\:\:P_s$$
เราสามารถเป็นตัวแทนของ EIRP ในรูปแบบ decibels เช่น
$$\left [ EIRP \right ] = \left [ G \right ] + \left [ P_s \right ]dBW$$
ที่ไหน G คือกำไรของการส่งเสาอากาศและ $P_s$ คือพลังของเครื่องส่งสัญญาณ
การสูญเสียการส่งข้อมูล
ความแตกต่างระหว่างกำลังที่ส่งไปที่ปลายด้านหนึ่งและรับที่สถานีรับเรียกว่า Transmission losses. การสูญเสียแบ่งออกได้เป็น 2 ประเภท
- ขาดทุนอย่างต่อเนื่อง
- การสูญเสียที่ผันแปร
การสูญเสียที่คงที่เช่นการสูญเสียตัวป้อนเรียกว่า constant losses. ไม่ว่าเราจะมีมาตรการป้องกันอย่างไรความสูญเสียเหล่านี้ก็ยังคงเกิดขึ้น
การสูญเสียอีกประเภทหนึ่งคือ variable loss. สภาพท้องฟ้าและสภาพอากาศเป็นตัวอย่างของการสูญเสียประเภทนี้ หมายถึงหากท้องฟ้าไม่ชัดเจนสัญญาณจะส่งไปยังดาวเทียมไม่ได้อย่างมีประสิทธิภาพหรือในทางกลับกัน
ดังนั้นขั้นตอนของเราจึงรวมการคำนวณการสูญเสียเนื่องจากสภาพอากาศแจ่มใสหรือสภาพท้องฟ้าแจ่มใสเป็น 1 stเนื่องจากการสูญเสียเหล่านี้คงที่ พวกเขาจะไม่เปลี่ยนแปลงไปตามกาลเวลา จากนั้นใน 2 ครั้งขั้นตอนที่เราสามารถคำนวณความสูญเสียอันเนื่องมาจากสภาพอากาศเลวร้าย
เชื่อมโยงการคำนวณงบประมาณ
การคำนวณงบประมาณลิงก์มีสองประเภทเนื่องจากมีลิงก์สองลิงก์คือ uplink และ downlink.
อัปลิงค์สถานี Earth
เป็นกระบวนการที่โลกกำลังส่งสัญญาณไปยังดาวเทียมและดาวเทียมกำลังรับสัญญาณ มันmathematical equation สามารถเขียนเป็น
$$\left(\frac{C}{N_0}\right)_U = [EIRP]_U+\left(\frac{G}{T}\right)_U - [LOSSES]_U -K$$
ที่ไหน
- $\left [\frac{C}{N_0}\right ]$ เป็นตัวให้บริการต่ออัตราส่วนความหนาแน่นของเสียง
- $\left [\frac{G}{T}\right ]$ คืออัตราส่วน G / T ของเครื่องรับสัญญาณดาวเทียมและหน่วยเป็น dB / K
ที่นี่การสูญเสียแสดงถึงการสูญเสียตัวป้อนตัวรับสัญญาณดาวเทียม การสูญเสียที่ขึ้นอยู่กับความถี่จะถูกนำมาพิจารณาทั้งหมด
ค่า EIRP ควรต่ำที่สุดเพื่อให้ UPLINK มีประสิทธิภาพ และเป็นไปได้เมื่อเราได้รับสภาพท้องฟ้าแจ่มใส
ที่นี่เราได้ใช้สัญกรณ์ (ตัวห้อย)“ U” ซึ่งแสดงถึงปรากฏการณ์อัปลิงค์
Downlink ดาวเทียม
ในกระบวนการนี้ดาวเทียมจะส่งสัญญาณและสถานีภาคพื้นดินได้รับ สมการนี้เหมือนกับการอัปลิงค์จากดาวเทียมโดยมีข้อแตกต่างที่เราใช้ตัวย่อ“ D” ทุกที่แทน“ U” เพื่อแสดงถึงปรากฏการณ์ดาวน์ลิงค์
มัน mathematical สมการสามารถเขียนเป็น;
$$\left [\frac{C}{N_0}\right ]_D = \left [ EIRP \right ]_D + \left [ \frac{G}{T} \right ]_D - \left [ LOSSES \right ]_D - K$$
ที่ไหน
- $\left [\frac{C}{N_0}\right ]$ เป็นตัวให้บริการต่ออัตราส่วนความหนาแน่นของเสียง
- $\left [\frac{G}{T}\right ]$ คืออัตราส่วน G / T ของเครื่องรับสถานีภาคพื้นดินและหน่วยเป็น dB / K
ที่นี่ความสูญเสียทั้งหมดที่มีอยู่รอบสถานีโลก
ในสมการข้างต้นเรายังไม่ได้รวมแบนด์วิดท์สัญญาณ B อย่างไรก็ตามถ้าเรารวมสมการนั้นจะถูกแก้ไขดังนี้
$$\left [\frac{C}{N_0}\right ]_D = \left [ EIRP \right ]_D + \left [ \frac{G}{T} \right ]_D - \left [ LOSSES \right ]_D -K-B$$
ลิงก์งบประมาณ
หากเรานำดาวเทียมภาคพื้นดินมาพิจารณาก็ควรคำนึงถึงการสูญเสียพื้นที่ว่าง (FSP) ด้วย
หากวางเสาอากาศไม่ถูกต้องอาจเกิดการสูญเสียได้ ดังนั้นเราจึงใช้AML(การสูญเสียแนวเสาอากาศ) เข้าบัญชี ในทำนองเดียวกันเมื่อสัญญาณมาจากดาวเทียมมายังโลกมันชนกับพื้นผิวโลกและบางส่วนก็ถูกดูดซับ สิ่งเหล่านี้ได้รับการดูแลโดยการสูญเสียการดูดซึมในชั้นบรรยากาศที่กำหนดโดย“AA” และวัดเป็น db
ตอนนี้เราสามารถเขียนสมการการสูญเสียสำหรับท้องฟ้าว่างเป็น
$$Losses = FSL + RFL+ AML+ AA + PL$$
ที่ไหน
RFL ย่อมาจากการสูญเสียตัวป้อนที่ได้รับและหน่วยคือ db
PL ย่อมาจากการสูญเสียที่ไม่ตรงกันของโพลาไรซ์
ตอนนี้ decibel equation สำหรับพลังงานที่ได้รับสามารถเขียนเป็น
$$P_R = EIRP + G_R + Losses$$
ที่ไหน
- $P_R$ หมายถึงกำลังรับซึ่งวัดเป็น dBW
- $G_r$ คือกำไรเสาอากาศรับ
การออกแบบลิงค์ลงมีความสำคัญมากกว่าการออกแบบอัปลิงค์ เนื่องจากข้อ จำกัด ด้านกำลังไฟฟ้าที่จำเป็นสำหรับการส่งและรับเสาอากาศ
บางครั้งบริการของดาวเทียมอยู่ที่ตำแหน่งใดตำแหน่งหนึ่งบนสถานีภาคพื้นดินและบางครั้งก็ไม่มีอยู่ นั่นหมายความว่าดาวเทียมอาจมีสถานีบริการของตัวเองที่แตกต่างกันไปตามสถานที่ต่างๆบนโลก พวกเขาส่งสัญญาณผู้ให้บริการสำหรับดาวเทียม
ในสถานการณ์เช่นนี้เราสามารถเข้าถึงได้หลายช่องทางเพื่อให้ดาวเทียมสามารถรับหรือให้สัญญาณจากสถานีต่างๆได้ตลอดเวลาโดยไม่มีสัญญาณรบกวนระหว่างกัน ต่อไปนี้คือไฟล์three types ของเทคนิคการเข้าถึงที่หลากหลาย
- FDMA (การเข้าถึงหลายส่วนความถี่)
- TDMA (การเข้าถึงหลายส่วนของเวลา)
- CDMA (Code Division Multiple Access)
ตอนนี้ให้เราคุยกันทีละเทคนิค
FDMA
ในการเข้าถึงหลายประเภทนี้เรากำหนดให้สัญญาณแต่ละประเภทเป็นย่านความถี่ (ช่วง) ที่แตกต่างกัน ดังนั้นสัญญาณสองสัญญาณไม่ควรมีช่วงความถี่ประเภทเดียวกัน ดังนั้นจะไม่มีการรบกวนใด ๆ แม้ว่าเราจะส่งสัญญาณเหล่านั้นในช่องสัญญาณเดียวก็ตาม
ที่สมบูรณ์แบบ exampleการเข้าถึงประเภทนี้คือช่องวิทยุของเรา เราจะเห็นได้ว่าแต่ละสถานีมีการกำหนดย่านความถี่ที่แตกต่างกันเพื่อใช้งาน
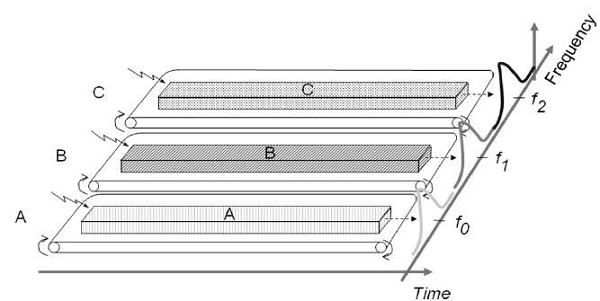
ลองใช้สามสถานี A, B และ C เราต้องการเข้าถึงผ่านเทคนิค FDMA เราจึงกำหนดคลื่นความถี่ที่แตกต่างกัน
ดังแสดงในรูปสถานีดาวเทียม A ถูกเก็บไว้ภายใต้ช่วงความถี่ 0 ถึง 20 HZ ในทำนองเดียวกันสถานี B และ C ได้รับการกำหนดช่วงความถี่ 30-60 Hz และ 70-90 Hz ตามลำดับ ไม่มีการรบกวนระหว่างพวกเขา
หลัก disadvantageของระบบประเภทนี้คือมีการระเบิดมาก ไม่แนะนำให้ใช้การเข้าถึงหลายรายการสำหรับช่องซึ่งมีไดนามิกและไม่สม่ำเสมอ เนื่องจากจะทำให้ข้อมูลไม่ยืดหยุ่นและไม่มีประสิทธิภาพ
TDMA
ตามชื่อที่แนะนำ TDMA คือการเข้าถึงตามเวลา ในที่นี้เรากำหนดกรอบเวลาที่แน่นอนให้กับแต่ละช่อง ภายในกรอบเวลานั้นช่องสามารถเข้าถึงแบนด์วิดท์สเปกตรัมทั้งหมด
แต่ละสถานีมีความยาวหรือช่องคงที่ สล็อตที่ไม่ได้ใช้งานจะยังคงอยู่ในสถานะว่าง
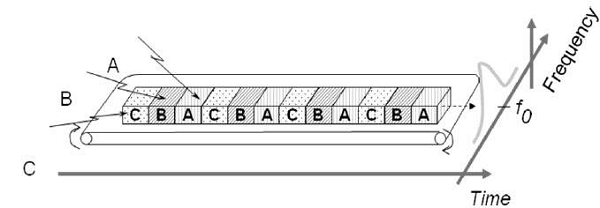
สมมติว่าเราต้องการส่งข้อมูลห้าแพ็กเก็ตไปยังแชนเนลเฉพาะในเทคนิค TDMA ดังนั้นเราควรกำหนดช่วงเวลาที่แน่นอนหรือtime frame ซึ่งสามารถเข้าถึงแบนด์วิดท์ทั้งหมดได้
ในรูปด้านบนแพ็กเก็ต 1, 3 และ 4 ทำงานอยู่ซึ่งส่งข้อมูล ในขณะที่แพ็กเก็ต 2 และ 5 ไม่ได้ใช้งานเนื่องจากไม่มีส่วนร่วม รูปแบบนี้จะเกิดซ้ำทุกครั้งที่เรากำหนดแบนด์วิดท์ให้กับช่องนั้น ๆ
แม้ว่าเราจะกำหนดช่วงเวลาบางช่วงให้กับช่องใดช่องหนึ่ง แต่ก็สามารถเปลี่ยนแปลงได้ขึ้นอยู่กับความสามารถในการรับน้ำหนัก นั่นหมายความว่าหากช่องกำลังส่งโหลดที่หนักกว่าก็สามารถกำหนดช่วงเวลาที่ใหญ่กว่าช่องสัญญาณที่ส่งโหลดที่เบากว่าได้ ที่ใหญ่ที่สุดนี้advantageของ TDMA มากกว่า FDMA ข้อดีอีกอย่างของ TDMA คือการใช้พลังงานจะต่ำมาก
Note - ในบางแอปพลิเคชันเราใช้ไฟล์ combination ของทั้งสอง TDMA and FDMAเทคนิค. ในกรณีนี้แต่ละช่องจะดำเนินการในย่านความถี่เฉพาะสำหรับช่วงเวลาหนึ่ง ๆ ในกรณีนี้การเลือกความถี่จะมีประสิทธิภาพมากกว่าและมีความจุมากขึ้นเมื่อเวลาผ่านไป
CDMA
ในเทคนิค CDMA จะมีการกำหนดรหัสเฉพาะให้กับแต่ละช่องสัญญาณเพื่อแยกความแตกต่างจากกันและกัน สมบูรณ์แบบexampleการเข้าถึงหลายประเภทนี้เป็นระบบเซลลูลาร์ของเรา เราจะเห็นว่าไม่มีหมายเลขโทรศัพท์มือถือของบุคคลสองคนที่ตรงกันแม้ว่าจะเป็นบริการมือถือ X หรือ Y เดียวกันก็ตามที่ให้บริการลูกค้าของ บริษัท โดยใช้แบนด์วิดท์เดียวกัน
ในกระบวนการ CDMA เราทำการถอดรหัสผลิตภัณฑ์ภายในของสัญญาณที่เข้ารหัสและลำดับการบิ่น ดังนั้นในทางคณิตศาสตร์จึงสามารถเขียนเป็น
$$Encoded\:signal = Orginal\:data\:\: \times\:\: chipping\:sequence$$
พื้นฐาน advantageการเข้าถึงหลายประเภทนี้คือการอนุญาตให้ผู้ใช้ทุกคนสามารถอยู่ร่วมกันและใช้แบนด์วิดท์ทั้งหมดในเวลาเดียวกัน เนื่องจากผู้ใช้แต่ละคนมีรหัสที่แตกต่างกันจึงไม่มีการรบกวนใด ๆ
ในเทคนิคนี้สถานีจำนวนมากสามารถมีช่องสัญญาณได้หลายช่องซึ่งแตกต่างจาก FDMA และ TDMA ส่วนที่ดีที่สุดของเทคนิคนี้คือแต่ละสถานีสามารถใช้คลื่นความถี่ทั้งหมดได้ตลอดเวลา
บริการของการสื่อสารผ่านดาวเทียมสามารถแบ่งออกเป็นสองประเภทดังต่อไปนี้
- บริการเชื่อมโยงการสื่อสารผ่านดาวเทียมทางเดียว
- บริการเชื่อมโยงการสื่อสารผ่านดาวเทียมสองทาง
ตอนนี้ให้เราพูดคุยเกี่ยวกับบริการแต่ละรายการทีละรายการ
บริการลิงค์การสื่อสารดาวเทียมทางเดียว
ใน one-wayบริการเชื่อมโยงการสื่อสารผ่านดาวเทียมข้อมูลสามารถถ่ายโอนจากสถานีโลกหนึ่งไปยังสถานีภาคพื้นดินหนึ่งหรือหลายสถานีผ่านดาวเทียม นั่นหมายความว่ามีการเชื่อมต่อแบบจุดต่อจุดและชี้ไปที่การเชื่อมต่อแบบหลายจุด
ด้านล่าง figure แสดงตัวอย่างบริการเชื่อมโยงการสื่อสารผ่านดาวเทียมทางเดียว
ที่นี่การสื่อสารเกิดขึ้นระหว่างสถานีดินแรก (เครื่องส่งสัญญาณ) และสถานีโลกที่สอง (เครื่องรับ) บนพื้นผิวโลกผ่านดาวเทียมใน one direction.
ต่อไปนี้เป็นไฟล์ one-way ลิงค์การสื่อสารผ่านดาวเทียม services.
การแพร่ภาพบริการดาวเทียมเช่นบริการวิทยุทีวีและอินเทอร์เน็ต
บริการปฏิบัติการอวกาศเช่นบริการโทรมาตรติดตามและสั่งการ
บริการดาวเทียมกำหนดวิทยุเช่นบริการระบุตำแหน่ง
บริการเชื่อมโยงการสื่อสารดาวเทียมสองทาง
ใน two-wayลิงค์การสื่อสารผ่านดาวเทียมข้อมูลสามารถแลกเปลี่ยนระหว่างสองสถานีโลกผ่านดาวเทียม นั่นหมายความว่าจะให้การเชื่อมต่อแบบจุดต่อจุดเท่านั้น
รูปต่อไปนี้แสดงตัวอย่างบริการเชื่อมโยงการสื่อสารผ่านดาวเทียมสองทาง
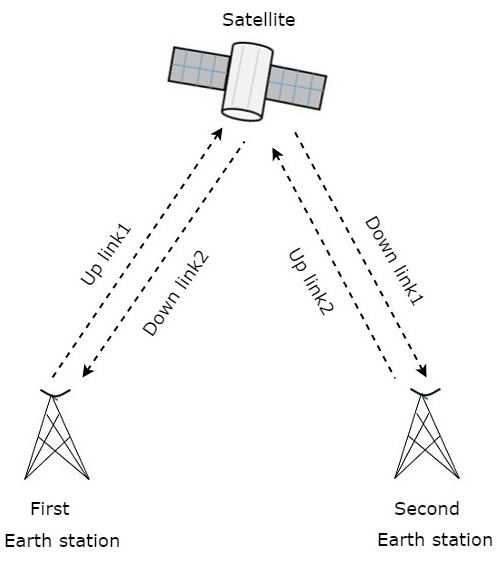
ที่นี่การสื่อสารเกิดขึ้นระหว่างสถานีดินแรก (เครื่องส่งสัญญาณ) และสถานีโลกที่สอง (เครื่องรับ) บนพื้นผิวโลกผ่านดาวเทียมใน two (ทั้งสอง) directions.
ต่อไปนี้เป็นลิงค์สื่อสารดาวเทียมสองทาง services.
บริการดาวเทียมคงที่เช่นโทรศัพท์โทรสารและข้อมูลของบริการอัตราบิตสูง
บริการดาวเทียมเคลื่อนที่เช่น Land mobile, Maritime และบริการสื่อสารเคลื่อนที่ Aero
ระบบกำหนดตำแหน่งบนโลก (GPS)เป็นระบบนำทางที่ใช้ดาวเทียม ได้สร้างการปฏิวัติในการนำทางและตำแหน่งตำแหน่ง ส่วนใหญ่จะใช้ในการระบุตำแหน่งการนำทางการตรวจสอบและการสำรวจแอปพลิเคชัน
ที่สำคัญ advantagesของการนำทางด้วยดาวเทียมคือการระบุตำแหน่งแบบเรียลไทม์และการซิงโครไนซ์เวลา นั่นเป็นเหตุผลที่ระบบนำทางด้วยดาวเทียมกลายเป็นส่วนสำคัญในแอพพลิเคชั่นส่วนใหญ่โดยที่ความคล่องตัวเป็นตัวแปรสำคัญ
ส่วนพื้นที่ GPS ที่ใช้งานได้อย่างสมบูรณ์ประกอบด้วยดาวเทียมยี่สิบสี่ดวงใน MEO ดาวเทียมเหล่านี้แบ่งออกเป็นหกกลุ่มเพื่อให้แต่ละกลุ่มมีดาวเทียมสี่ดวง กลุ่มของดาวเทียมสี่ดวงถูกเรียกว่าเป็นหนึ่งเดียวconstellation. กลุ่มดาวสองกลุ่มที่อยู่ติดกันจะถูกคั่นด้วยลองจิจูด 60 องศา
orbital period ของดาวเทียมแต่ละดวงมีค่าประมาณเท่ากับ twelve hours. ดังนั้นดาวเทียมทุกดวงจึงหมุนรอบโลกสองรอบทุกวัน เมื่อใดก็ตามเครื่องรับ GPS จะรับสัญญาณจากดาวเทียมอย่างน้อยสี่ดวง
รหัส GPS และบริการ
ดาวเทียม GPS แต่ละตัวส่งสัญญาณสองสัญญาณ L1 and L2 มีความถี่ต่างกัน Trilaterationเป็นวิธีง่ายๆในการค้นหาตำแหน่ง (Latitude, Longitude, Elevation) ของเครื่องรับ GPS การใช้วิธีนี้สามารถวัดตำแหน่งของจุดที่ไม่รู้จักได้จากจุดที่ทราบสามจุด
รหัส GPS
ต่อไปนี้เป็นรหัส GPS สองประเภท
- รหัสการได้มาอย่างหยาบหรือรหัส C / A
- รหัสที่แม่นยำหรือรหัส P
สัญญาณ L 1ถูกมอดูเลตด้วยลำดับบิตสุ่มหลอก 1.023 Mbps รหัสนี้เรียกว่า Coarse Acquisition code หรือC/A code และถูกใช้โดยสาธารณะ
สัญญาณ L 2ถูกมอดูเลตด้วยลำดับบิตสุ่มหลอก 10.23 Mbps รหัสนี้เรียกว่ารหัสที่แม่นยำหรือP codeและใช้ในระบบกำหนดตำแหน่งทางทหาร โดยทั่วไปรหัส P นี้จะถูกส่งในรูปแบบที่เข้ารหัสและเรียกว่าเป็นY code
รหัส P ให้ความแม่นยำในการวัดที่ดีกว่าเมื่อเทียบกับรหัส C / A เนื่องจากอัตราบิตของรหัส P มีค่ามากกว่าอัตราบิตของรหัส C / A
บริการ GPS
ต่อไปนี้เป็นบริการสองประเภทที่จัดหาให้โดย GPS
- บริการระบุตำแหน่งที่แม่นยำ (PPS)
- บริการกำหนดตำแหน่งมาตรฐาน (SPS)
PPS receiversให้ติดตามทั้ง C / รหัสและ P โค้ดบนสองสัญญาณ, L 1และ L 2 รหัส Y ถูกถอดรหัสที่เครื่องรับเพื่อให้ได้รหัส P
SPS receiversให้ติดตามเพียง C / รหัสสัญญาณ, L 1
ตัวรับสัญญาณ GPS
มีเพียงการส่งทางเดียวจากดาวเทียมไปยังผู้ใช้ในระบบ GPS ดังนั้นผู้ใช้แต่ละคนไม่จำเป็นต้องใช้เครื่องส่งสัญญาณ แต่มีเพียงไฟล์GPS receiver. ส่วนใหญ่จะใช้เพื่อค้นหาตำแหน่งที่ถูกต้องของวัตถุ ทำงานนี้โดยใช้สัญญาณที่ได้รับจากดาวเทียม
block diagram ของเครื่องรับ GPS แสดงดังรูปด้านล่าง
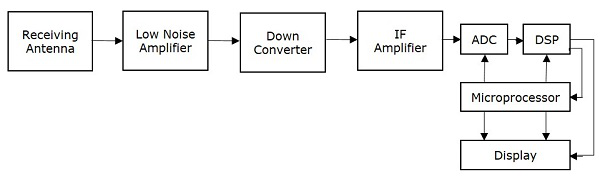
ฟังก์ชั่นของแต่ละบล็อกที่มีอยู่ในเครื่องรับ GPS มีการระบุไว้ด้านล่าง
Receiving Antennaรับสัญญาณดาวเทียม ส่วนใหญ่เป็นเสาอากาศแบบโพลาไรซ์แบบวงกลม
Low Noise Amplifier (LNA) ขยายสัญญาณที่ได้รับอ่อน
Down converter แปลงความถี่ของสัญญาณที่ได้รับเป็นสัญญาณ Intermediate Frequency (IF)
IF Amplifier ขยายสัญญาณความถี่กลาง (IF)
ADCทำการแปลงสัญญาณแอนะล็อกซึ่งได้รับจากเครื่องขยายสัญญาณ IF เป็นดิจิตอล สมมติว่าบล็อกการสุ่มตัวอย่างและการหาปริมาณยังมีอยู่ใน ADC (ตัวแปลงอนาล็อกเป็นดิจิตอล)
DSP (Digital Signal Processor) สร้างรหัส C / A
Microprocessorทำการคำนวณตำแหน่งและให้สัญญาณเวลาเพื่อควบคุมการทำงานของบล็อกดิจิทัลอื่น ๆ จะส่งข้อมูลที่เป็นประโยชน์ไปยังหน่วยแสดงผลเพื่อแสดงบนหน้าจอ