การสื่อสารผ่านดาวเทียม - กลศาสตร์การโคจร
เรารู้ว่าเส้นทางของดาวเทียมที่หมุนรอบโลกเป็นที่รู้จักกันในชื่อ orbit. เส้นทางนี้สามารถแสดงด้วยสัญกรณ์ทางคณิตศาสตร์ กลศาสตร์การโคจรคือการศึกษาการเคลื่อนที่ของดาวเทียมที่มีอยู่ในวงโคจร ดังนั้นเราจึงสามารถเข้าใจการทำงานของอวกาศได้อย่างง่ายดายด้วยความรู้เกี่ยวกับการเคลื่อนที่ของวงโคจร
องค์ประกอบวงโคจร
องค์ประกอบของวงโคจรเป็นพารามิเตอร์ซึ่งมีประโยชน์ในการอธิบายการเคลื่อนที่ของวงโคจรของดาวเทียม ต่อไปนี้คือไฟล์orbital elements.
- แกนกึ่งหลัก
- Eccentricity
- หมายถึงความผิดปกติ
- อาร์กิวเมนต์ของ perigee
- Inclination
- การขึ้นไปทางขวาของโหนดจากน้อยไปมาก
องค์ประกอบวงโคจรทั้งหกข้างต้นกำหนดวงโคจรของดาวเทียมโลก ดังนั้นจึงเป็นเรื่องง่ายที่จะแยกแยะดาวเทียมดวงหนึ่งจากดาวเทียมดวงอื่นโดยพิจารณาจากค่าขององค์ประกอบวงโคจร
แกนกึ่งหลัก
ความยาวของ Semi-major axis (a)กำหนดขนาดของวงโคจรของดาวเทียม มันเป็นครึ่งหนึ่งของแกนหลัก สิ่งนี้จะวิ่งจากจุดศูนย์กลางผ่านโฟกัสไปที่ขอบของวงรี ดังนั้นมันจึงเป็นรัศมีของวงโคจรที่สองจุดที่ไกลที่สุดของวงโคจร
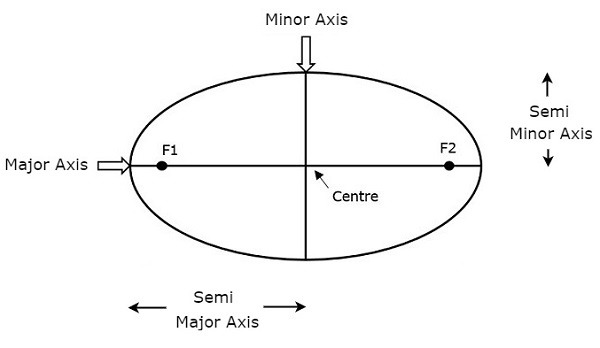
ทั้งแกนกึ่งหลักและกึ่งรองจะแสดงในรูปด้านบน ความยาวกึ่งmajor axis (a) ไม่เพียง แต่กำหนดขนาดวงโคจรของดาวเทียมเท่านั้น แต่ยังรวมถึงช่วงเวลาแห่งการปฏิวัติด้วย
ถ้าวงโคจรวงกลมถือเป็นกรณีพิเศษความยาวของแกนกึ่งสำคัญจะเท่ากับ radius ของวงโคจรวงกลมนั้น
ความเยื้องศูนย์
คุณค่าของ Eccentricity (e)แก้ไขรูปร่างของวงโคจรของดาวเทียม พารามิเตอร์นี้บ่งชี้ความเบี่ยงเบนของรูปร่างของวงโคจรจากวงกลมที่สมบูรณ์แบบ
ถ้าความยาวของแกนกึ่งหลักและแกนรองกึ่งเล็กของวงโคจรรูปไข่เป็น a & b ดังนั้นนิพจน์ทางคณิตศาสตร์สำหรับ eccentricity (e) จะ
$$ e = \ frac {\ sqrt {a ^ 2 - b ^ 2}} {a} $$
ค่าของความเยื้องศูนย์ของวงโคจรวงกลมคือ zeroเนื่องจากทั้ง a & b เท่ากัน ในขณะที่ค่าของความเยื้องศูนย์ของวงโคจรรูปไข่อยู่ระหว่างศูนย์ถึงหนึ่ง
ดังต่อไปนี้ figure แสดงวงโคจรของดาวเทียมต่างๆสำหรับค่าความเยื้องศูนย์ (e) ที่แตกต่างกัน
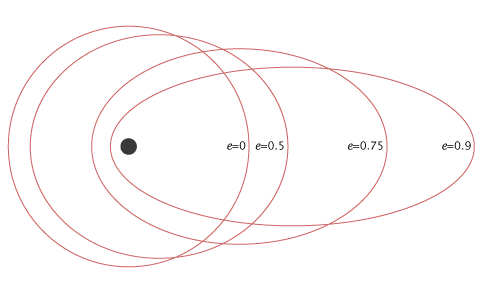
จากรูปด้านบนวงโคจรของดาวเทียมที่สอดคล้องกับค่าความเยื้องศูนย์ (e) ของศูนย์คือวงโคจรวงกลม และวงโคจรของดาวเทียมอีกสามดวงที่เหลือเป็นวงรีที่สอดคล้องกับค่าความเบี้ยว (e) 0.5, 0.75 และ 0.9
หมายถึงความผิดปกติ
สำหรับดาวเทียมจุดที่อยู่ใกล้โลกมากที่สุดเรียกว่า Perigee Mean anomaly (M) ให้ค่าเฉลี่ยของตำแหน่งเชิงมุมของดาวเทียมโดยอ้างอิงถึง perigee
ถ้าวงโคจรเป็นวงกลมความผิดปกติค่าเฉลี่ยจะให้ตำแหน่งเชิงมุมของดาวเทียมในวงโคจร แต่ถ้าวงโคจรเป็นวงรีการคำนวณตำแหน่งที่แน่นอนนั้นยากมาก ในขณะนั้นค่าเฉลี่ยความผิดปกติจะใช้เป็นขั้นตอนกลาง
อาร์กิวเมนต์ของ Perigee
วงโคจรของดาวเทียมตัดระนาบเส้นศูนย์สูตรสองจุด จุดแรกเรียกว่าdescending nodeซึ่งดาวเทียมเคลื่อนผ่านจากซีกโลกเหนือไปยังซีกโลกใต้ จุดที่สองเรียกว่าascending nodeซึ่งดาวเทียมเคลื่อนผ่านจากซีกโลกใต้ไปยังซีกโลกเหนือ
Argument of perigee (ω)คือมุมระหว่างโหนดจากน้อยไปมากและ perigee ถ้าทั้ง perigee และโหนดจากน้อยไปมากมีอยู่ในจุดเดียวกันอาร์กิวเมนต์ของ perigee จะเป็นศูนย์องศา
อาร์กิวเมนต์ของ perigee วัดได้ในระนาบวงโคจรที่ศูนย์กลางของโลกตามทิศทางการเคลื่อนที่ของดาวเทียม
ความโน้มเอียง
มุมระหว่างระนาบวงโคจรกับระนาบเส้นศูนย์สูตรของโลกเรียกว่า inclination (i). วัดจากโหนดจากน้อยไปมากโดยมีทิศทางเป็นตะวันออกไปเหนือ ดังนั้นการเอียงจึงกำหนดแนวของวงโคจรโดยพิจารณาจากเส้นศูนย์สูตรของโลกเป็นข้อมูลอ้างอิง

มีสี่ประเภทของวงโคจรตามมุมเอียง
Equatorial orbit - มุมเอียงเป็นศูนย์องศาหรือ 180 องศา
Polar orbit - มุมเอียง 90 องศา
Prograde orbit - มุมเอียงอยู่ระหว่างศูนย์ถึง 90 องศา
Retrograde orbit - มุมเอียงอยู่ระหว่าง 90 ถึง 180 องศา
การขึ้นไปทางขวาของโหนดจากน้อยไปมาก
เรารู้ว่า ascending node คือจุดที่ดาวเทียมพาดผ่านระนาบเส้นศูนย์สูตรขณะเคลื่อนจากซีกโลกใต้ไปยังซีกโลกเหนือ
การขึ้นไปทางขวาของโหนดจากน้อยไปหามาก (Ω)คือมุมระหว่างเส้นของราศีเมษและโหนขึ้นไปทางทิศตะวันออกในระนาบเส้นศูนย์สูตร ราศีเมษเรียกอีกอย่างว่า vernal และ equinox
ดาวเทียม ground trackคือเส้นทางบนพื้นผิวโลกซึ่งอยู่ใต้วงโคจรของมัน การติดตามพื้นของดาวเทียมอาจมีหลายรูปแบบขึ้นอยู่กับค่าขององค์ประกอบการโคจร
สมการการโคจร
ในส่วนนี้ให้เราพูดคุยเกี่ยวกับสมการที่เกี่ยวข้องกับการเคลื่อนที่ของวงโคจร
กองกำลังที่ทำหน้าที่บนดาวเทียม
ดาวเทียมเมื่อหมุนรอบโลกจะได้รับแรงดึงจากโลกเนื่องจากแรงโน้มถ่วงของโลก กองกำลังนี้เรียกว่าCentripetal force(F 1 ) เนื่องจากแรงนี้ทำให้ดาวเทียมพุ่งเข้าหามัน
ในทางคณิตศาสตร์ Centripetal force(F 1 ) ที่ทำหน้าที่บนดาวเทียมเนื่องจากพื้นโลกสามารถเขียนเป็น
$$ F_ {1} = \ frac {GMm} {R ^ 2} $$
ที่ไหน
Gเป็นสากลอย่างต่อเนื่องแรงโน้มถ่วงและมันจะมีค่าเท่ากับ 6.673 x 10 -11 N ∙ม. 2 / กก. 2
Mคือมวลของโลกและเท่ากับ 5.98 x 10 24 Kg.
m คือมวลของดาวเทียม
R คือระยะทางจากดาวเทียมถึงศูนย์กลางของโลก
ดาวเทียมเมื่อหมุนรอบโลกจะได้รับแรงดึงจากดวงอาทิตย์และดวงจันทร์เนื่องจากแรงดึงดูดของโลก กองกำลังนี้เรียกว่าCentrifugal force(F 2 ) เนื่องจากแรงนี้ทำให้ดาวเทียมอยู่ห่างจากพื้นโลก
ในทางคณิตศาสตร์ Centrifugal force(F 2 ) ที่แสดงบนดาวเทียมสามารถเขียนเป็น
$$ F_ {2} = \ frac {mv ^ 2} {R} $$
ที่ไหน v คือความเร็วในการโคจรของดาวเทียม
ความเร็ววงโคจร
ความเร็วในการโคจรของดาวเทียมคือความเร็วที่ดาวเทียมหมุนรอบโลก ดาวเทียมไม่เบี่ยงเบนไปจากวงโคจรและเคลื่อนที่ด้วยความเร็วที่แน่นอนในวงโคจรนั้นเมื่อทั้งแรงสู่ศูนย์กลางและแรงเหวี่ยงbalance ซึ่งกันและกัน
ดังนั้น, equateแรงสู่ศูนย์กลาง (F 1 ) และแรงเหวี่ยง (F 2 )
$$ \ frac {GMm} {R ^ 2} = \ frac {mv ^ 2} {R} $$
$$ => \ frac {GM} {R} = v ^ 2 $$
$$ => v = \ sqrt {\ frac {GM} {R}} $$
ดังนั้นไฟล์ orbital velocity ของดาวเทียมคือ
$$ v = \ sqrt {\ frac {GM} {R}} $$
ที่ไหน
Gเป็นค่าคงที่แรงโน้มถ่วงและมันจะมีค่าเท่ากับ 6.673 x 10 -11 N ∙ม. 2 / กก. 2
Mคือมวลของโลกและเท่ากับ 5.98 x 10 24 Kg.
R คือระยะทางจากดาวเทียมถึงศูนย์กลางของโลก
ดังนั้นความเร็วในการโคจรเป็นหลัก depends ในระยะทางจากดาวเทียมถึงศูนย์กลางของโลก (R) เนื่องจาก G & M เป็นค่าคงที่