Elektronik Devreler - Doğrultucular
Bir AC'yi DC gücüne dönüştürme ihtiyacı ortaya çıktığında, kurtarma için bir redresör devresi gelir. Basit bir PN bağlantı diyotu, doğrultucu görevi görür. Diyotun ileri eğilimli ve ters eğimli koşulları, düzeltmeyi yapar.
Düzeltme
Alternatif bir akım, durumunu sürekli olarak değiştirme özelliğine sahiptir. Bu, alternatif bir akımın gösterildiği sinüs dalgasını gözlemleyerek anlaşılır. Pozitif yönünde yükselir, pik pozitif bir değere gider, oradan normale düşer ve tekrar negatif kısma giderek negatif pike ulaşır ve tekrar normale döner ve devam eder.
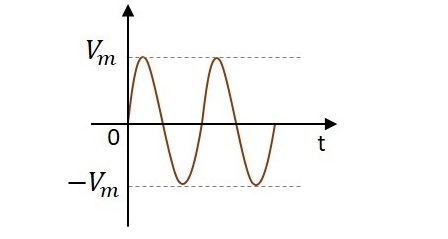
Dalga oluşumu yolculuğunda dalganın olumlu ve olumsuz yönlerde gittiğini gözlemleyebiliriz. Aslında tamamen değişiyor ve dolayısıyla alternatif akım adı.
Ancak düzeltme işlemi sırasında, bu alternatif akım, doğru akım DC'ye dönüştürülür. O zamana kadar hem pozitif hem de negatif yönde akan dalga, DC'ye dönüştürüldüğünde yönünü yalnızca pozitif yönde sınırlandıracaktır. Bu nedenle, aşağıdaki şekilde olduğu gibi, akımın sadece pozitif yönde akmasına ve negatif yönde direnmesine izin verilir.

Düzeltme yapan devreye bir Rectifier circuit. Bir doğrultucu devresi oluşturmak için bir doğrultucu olarak bir diyot kullanılır.
Doğrultucu devreleri türleri
Çıkışlarına bağlı olarak iki ana tip redresör devresi vardır. Onlar
- Yarım dalga Doğrultucu
- Tam dalga Doğrultucu
Yarım dalgalı bir doğrultucu devresi, giriş kaynağının yalnızca pozitif yarım döngülerini düzeltirken, Tam dalga doğrultucu devresi, giriş kaynağının hem pozitif hem de negatif yarım döngülerini düzeltir.
Yarım Dalga Doğrultucu
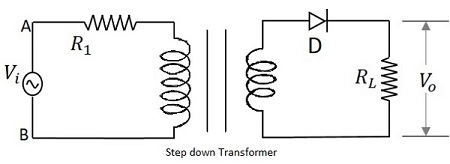
Yarım dalga doğrultucunun adı, rectification sadece için yapılır halfdöngünün. AC sinyali, kullanıma göre yukarı veya aşağı adım atan bir giriş trafosu aracılığıyla verilir. Giriş voltajını düşürmek için çoğunlukla redresör devrelerinde bir düşürücü transformatör kullanılır.
Transformatöre verilen giriş sinyali, redresör görevi gören bir PN bağlantı diyotundan geçirilir. Bu diyot, girişin yalnızca pozitif yarı döngüleri için AC voltajını darbeli dc'ye dönüştürür. Devrenin sonuna bir yük direnci bağlanır. Aşağıdaki şekil bir yarım dalga doğrultucunun devresini göstermektedir.
Bir HWR'nin Çalışması
T Giriş sinyali, gerilim seviyelerini düşüren transformatöre verilir. Transformatörün çıkışı, redresör görevi gören diyota verilir. Bu diyot, giriş sinyalinin pozitif yarım döngüleri için AÇIK hale gelir (iletir). Bu nedenle devrede bir akım akar ve yük direnci boyunca bir voltaj düşüşü olur. Negatif yarım döngülerde diyot KAPALI olur (işlem yapmaz) ve dolayısıyla negatif yarım döngülerin çıkışı $ i_ {D} = 0 $ ve $ V_ {o} = 0 $ olacaktır.
Bu nedenle çıkış, giriş voltajının yalnızca pozitif yarım döngüleri için mevcuttur (ters kaçak akımı ihmal ederek). Bu çıkış, yük direnci üzerinden alınan titreşimli olacaktır.
Bir HWR'nin dalga formları
Giriş ve çıkış dalga formları aşağıdaki şekilde gösterildiği gibidir.
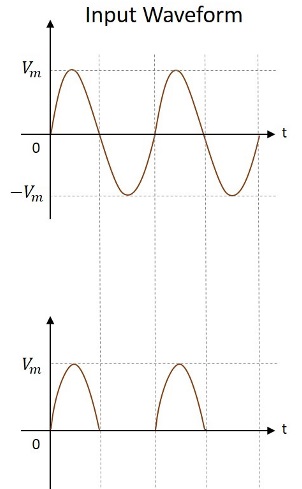
Bu nedenle, bir yarım dalga doğrultucunun çıkışı, atımlı bir dc'dir. Yarım dalga doğrultucunun çıkışından elde edilen birkaç değeri anlayarak yukarıdaki devreyi analiz etmeye çalışalım.
Yarım Dalga Doğrultucu Analizi
Yarım dalgalı bir doğrultucu devresini analiz etmek için, giriş voltajı denklemini ele alalım.
$$ v_ {i} = V_ {m} \ sin \ omega t $$
$ V_ {m} $, besleme voltajının maksimum değeridir.
Diyotun ideal olduğunu varsayalım.
- İleri yöndeki direnç, yani AÇIK durumunda, $ R_f $ dir.
- Ters yöndeki direnç, yani KAPALI durumdaki direnç $ R_r $ 'dır.
Akım i diyotta veya yük direncinde $ R_L $ verilir
$ i = I_m \ sin \ omega t \ quad için \ quad 0 \ leq \ omega t \ leq 2 \ pi $
$ i = 0 \ quad \ quad \ quad \ quad için \ quad \ pi \ leq \ omega t \ leq 2 \ pi $
Nerede
$$ I_m = \ frac {V_m} {R_f + R_L} $$
DC Çıkış Akımı
Ortalama akım $ I_ {dc} $, tarafından verilir
$$ I_ {dc} = \ frac {1} {2 \ pi} \ int_ {0} ^ {2 \ pi} i \: d \ left (\ omega t \ right) $$
$$ = \ frac {1} {2 \ pi} \ left [\ int_ {0} ^ {\ pi} I_m \ sin \ omega t \: d \ left (\ omega t \ right) + \ int_ {0} ^ {2 \ pi} 0 \: d \ left (\ omega t \ right) \ sağ] $$
$$ = \ frac {1} {2 \ pi} \ left [I_m \ left \ {- \ cos \ omega t \ right \} _ {0} ^ {\ pi} \ right] $$
$$ = \ frac {1} {2 \ pi} \ sol [I_m \ sol \ {+ 1- \ sol (-1 \ sağ) \ sağ \} \ sağ] = \ frac {I_m} {\ pi} = 0.318 I_m $$
$ I_m $ değerini değiştirerek şunu elde ederiz
$$ I_ {dc} = \ frac {V_m} {\ pi \ left (R_f + R_L \ sağ)} $$
$ R_L >> R_f $ ise, o zaman
$$ I_ {dc} = \ frac {V_m} {\ pi R_L} = 0,318 \ frac {V_m} {R_L} $$
DC Çıkış Gerilimi
DC çıkış voltajı şu şekilde verilir:
$$ V_ {dc} = I_ {dc} \ times R_L = \ frac {I_m} {\ pi} \ times R_L $$
$$ = \ frac {V_m \ times R_L} {\ pi \ left (R_f + R_L \ sağ)} = \ frac {V_m} {\ pi \ left \ {1+ \ left (R_f / R_L \ sağ) \ sağ \}} $$
$ R_L >> R_f $ ise, o zaman
$$ V_ {dc} = \ frac {V_m} {\ pi} = 0,318 V_m $$
RMS Akım ve Gerilim
RMS akımının değeri şu şekilde verilir:
$$ I_ {rms} = \ left [\ frac {1} {2 \ pi} \ int_ {0} ^ {2 \ pi} i ^ {2} d \ left (\ omega t \ right) \ sağ] ^ {\ frac {1} {2}} $$
$$ I_ {rms} = \ sol [\ frac {1} {2 \ pi} \ int_ {0} ^ {2 \ pi} I_ {m} ^ {2} \ sin ^ {2} \ omega t \: d \ left (\ omega t \ right) + \ frac {1} {2 \ pi} \ int _ {\ pi} ^ {2 \ pi} 0 \: d \ left (\ omega t \ right) \ sağ] ^ {\ frac {1} {2}} $$
$$ = \ left [\ frac {I_ {m} ^ {2}} {2 \ pi} \ int_ {0} ^ {\ pi} \ left (\ frac {1- \ cos 2 \ omega t} {2 } \ sağ) d \ sol (\ omega t \ sağ) \ sağ] ^ {\ frac {1} {2}} $$
$$ = \ left [\ frac {I_ {m} ^ {2}} {4 \ pi} \ left \ {\ left (\ omega t \ right) - \ frac {\ sin 2 \ omega t} {2} \ sağ \} _ {0} ^ {\ pi} \ sağ] ^ {\ frac {1} {2}} $$
$$ = \ left [\ frac {I_ {m} ^ {2}} {4 \ pi} \ left \ {\ pi - 0 - \ frac {\ sin 2 \ pi} {2} + \ sin 0 \ right \} \ sağ] ^ {\ frac {1} {2}} $$
$$ = \ left [\ frac {I_ {m} ^ {2}} {4 \ pi} \ sağ] ^ {\ frac {1} {2}} = \ frac {I_m} {2} $$
$$ = \ frac {V_m} {2 \ left (R_f + R_L \ sağ)} $$
Yük boyunca RMS voltajı
$$ V_ {rms} = I_ {rms} \ times R_L = \ frac {V_m \ times R_L} {2 \ left (R_f + R_L \ sağ)} $$
$$ = \ frac {V_m} {2 \ left \ {1+ \ left (R_f / R_L \ sağ) \ sağ \}} $$
$ R_L >> R_f $ ise, o zaman
$$ V_ {rms} = \ frac {V_m} {2} $$
Doğrultucu Verimliliği
Daha iyi bir çıktı için herhangi bir devrenin çalışmasında verimli olması gerekir. Yarım dalga doğrultucunun verimliliğini hesaplamak için, çıkış gücünün giriş gücüne oranı dikkate alınmalıdır.
Doğrultucu verimliliği şu şekilde tanımlanır:
$$ \ eta = \ frac {dcpower \: \: teslim \: \: to \: \: the \: \: load} {acinput \: \: power \: \: from \: \: transformer \: \ : ikincil} = \ frac {P_ {ac}} {P_ {dc}} $$
Şimdi
$$ P_ {dc} = \ sol ({I_ {dc}} \ sağ) ^ 2 \ times R_L = \ frac {I_m R_L} {\ pi ^ 2} $$
Daha ileri
$$ P_ {ac} = P_a + P_r $$
Nerede
$ P_a = güç \: dağıtılan \: \: \: kavşağı \: / \: diyot $
$$ = I_ {rms} ^ {2} \ times R_f = \ frac {I_ {m} ^ {2}} {4} \ times R_f $$
Ve
$$ P_r = güç \: dağıtılan \: içinde \: \: yük \: direnç $$
$$ = I_ {rms} ^ {2} \ times R_L = \ frac {I_ {m} ^ {2}} {4} \ times R_L $$
$$ P_ {ac} = \ frac {I_ {m} ^ {2}} {4} \ times R_f + \ frac {I_ {m} ^ {2}} {4} \ times R_L = \ frac {I_ {m } ^ {2}} {4} \ left (R_f + R_L \ sağ) $$
$ P_ {ac} $ ve $ P_ {dc} $ ifadelerinin her ikisinden de yazabiliriz
$$ \ eta = \ frac {I_ {m} ^ {2} R_L / \ pi ^ 2} {I_ {m} ^ {2} \ left (R_f + R_L \ sağ) / 4} = \ frac {4} {\ pi ^ 2} \ frac {R_L} {\ left (R_f + R_L \ sağ)} $$
$$ = \ frac {4} {\ pi ^ 2} \ frac {1} {\ left \ {1+ \ left (R_f / R_L \ sağ) \ sağ \}} = \ frac {0.406} {\ sol \ {1+ \ left (R_f / R_L \ sağ) \ sağ \}} $$
Yüzde doğrultucu verimliliği
$$ \ eta = \ frac {40.6} {\ lbrace1 + \ lgroup \: R_ {f} / R_ {L} \ rgroup \ rbrace} $$
Teorik olarak, bir yarım dalga doğrultucunun doğrultucu verimliliğinin maksimum değeri $ R_ {f} / R_ {L} = 0 $ olduğunda% 40.6'dır.
Ayrıca, verimlilik aşağıdaki şekilde hesaplanabilir
$$ \ eta = \ frac {P_ {dc}} {P_ {ac}} = \ frac {\ left (I_ {dc} \ right) ^ 2R_L} {\ left (I_ {rms} \ sağ) ^ 2R_L} = \ frac {\ left (V_ {dc} / R_L \ sağ) ^ 2R_L} {\ left (V_ {rms} / R_L \ sağ) ^ 2R_L} = \ frac {\ left (V_ {dc} \ sağ) ^ 2} {\ left (V_ {rms} \ sağ) ^ 2} $$
$$ = \ frac {\ left (V_m / \ pi \ right) ^ 2} {\ left (V_m / 2 \ right) ^ 2} = \ frac {4} {\ pi ^ 2} = 0.406 $$
$$ = 40,6 \% $$
Dalgalanma Faktörü
Düzeltilmiş çıktı, dalgacıklar şeklinde içinde bulunan bir miktar AC bileşeni içerir. Bu, yarım dalga doğrultucunun çıkış dalga biçimini gözlemleyerek anlaşılır. Saf bir dc elde etmek için, bu bileşen hakkında bir fikrimiz olmalı.
Dalgalanma faktörü, düzeltilmiş çıktının dalgalılığını verir. İle gösteriliry. Bu, voltaj veya akımın ac bileşeninin etkin değerinin doğrudan değere veya ortalama değere oranı olarak tanımlanabilir.
$$ \ gamma = \ frac {dalgalanma \: gerilim} {dc \: gerilim} = \ frac {rms \: değer \: / \: akabinde} {dcvalue \: / \: dalga} = \ frac {\ left ( V_r \ right) _ {rms}} {v_ {dc}} $$
Buraya,
$$ \ left (V_r \ right) _ {rms} = \ sqrt {V_ {rms} ^ {2} -V_ {dc} ^ {2}} $$
Bu nedenle,
$$ \ gamma = \ frac {\ sqrt {V_ {rms} ^ {2} -V_ {dc} ^ {2}}} {V_ {dc}} = \ sqrt {\ left (\ frac {V_ {rms} } {V_ {dc}} \ sağ) ^ 2-1} $$
Şimdi,
$$ V_ {rms} = \ sol [\ frac {1} {2 \ pi} \ int_ {0} ^ {2 \ pi} V_ {m} ^ {2} \ sin ^ 2 \ omega t \: d \ sol (\ omega t \ sağ) \ sağ] ^ {\ frac {1} {2}} $$
$$ = V_m \ left [\ frac {1} {4 \ pi} \ int_ {0} ^ {\ pi} \ left (1- \ cos2 \: \ omega t \ right) d \ left (\ omega t \ sağ) \ sağ] ^ {\ frac {1} {2}} = \ frac {V_m} {2} $$
$$ V_ {dc} = V_ {av} = \ frac {1} {2 \ pi} \ left [\ int_ {0} ^ {\ pi} V_m \ sin \ omega t \: d \ left (\ omega t \ right) + \ int_ {0} ^ {2 \ pi} 0.d \ left (\ omega t \ right) \ right] $$
$$ = \ frac {V_m} {2 \ pi} \ left [- \ cos \ omega t \ right] _ {0} ^ {\ pi} = \ frac {V_m} {\ pi} $$
$$ \ gamma = \ sqrt {\ left [\ left \ {\ frac {\ left (V_m / 2 \ right)} {\ left (V_m / \ pi \ right)} \ sağ \} ^ 2-1 \ sağ ]} = \ sqrt {\ left \ {\ left (\ frac {\ pi} {2} \ sağ) ^ 2-1 \ sağ \}} = 1,21 $$
Dalgalanma faktörü ayrıca şu şekilde tanımlanır:
$$ \ gamma = \ frac {\ left (I_r \ right) _ {rms}} {I_ {dc}} $$
Yarım dalga doğrultucudaki dalgalanma faktörünün değeri 1,21 olduğundan, çıkışta bulunan ac miktarının dc voltajının 121 $ \% $ olduğu anlamına gelir.
Yönetmelik
Yükün içinden geçen akım, yük direncine bağlı olarak değişebilir. Ancak böyle bir durumda bile, bu yük direnci üzerinden alınan çıkış voltajımızın sabit olmasını bekliyoruz. Bu nedenle, voltajımızın farklı yük koşullarında bile düzenlenmesi gerekir.
DC yük akımındaki değişiklik ile DC çıkış voltajının değişimi şu şekilde tanımlanır: Regulation. Yüzde düzenlemesi aşağıdaki şekilde hesaplanır.
$$ Yüzde \: düzenleme = \ frac {V_ {no \: load} -V_ {full \: load}} {V_ {full \: load}} \ times 100 \% $$
Yüzde düzenlemesi ne kadar düşükse, güç kaynağı o kadar iyi olur. İdeal bir güç kaynağı sıfır yüzde düzenlemesine sahip olacaktır.
Trafo Kullanım Faktörü
Bir redresör devresinde yüke verilecek DC güç, bir devrede kullanılan transformatörün derecesine karar verir.
Dolayısıyla, trafo kullanım faktörü şu şekilde tanımlanır:
$$ TUF = \ frac {dcpower \: to \: be \: teslim \: to \: the \: load} {acrating \: of \: the \: transformer \: ikincil} $$
$$ = \ frac {P_ {dc}} {P_ {ac \ left (derecelendirme \ sağ)}} $$
Transformatör teorisine göre, sekonderin anma gerilimi olacaktır.
$$ V_m / \ sqrt {2} $$
İçinden akan gerçek RMS voltajı,
$$ I_m / 2 $$
Bu nedenle
$$ TUF = \ frac {\ left (I_m / \ pi \ right) ^ 2 \ times R_L} {\ left (V_m / \ sqrt {2} \ right) \ times \ left (I_m / 2 \ sağ)} $ $
Fakat
$$ V_m = I_m \ sol (R_f + R_L \ sağ) $$
Bu nedenle
$$ TUF = \ frac {\ left (I_m / \ pi \ right) ^ 2 \ times R_L} {\ left \ {I_m \ left (R_f + R_L \ sağ) / \ sqrt {2} \ sağ \} \ times \ left (I_m / 2 \ right)} $$
$$ = \ frac {2 \ sqrt {2}} {\ pi ^ 2} \ times \ frac {R_L} {\ left (R_f + R_L \ right)} $$
$$ = \ frac {2 \ sqrt {2}} {\ pi ^ 2} = 0,287 $$
Tepe Ters Gerilimi
Ters öngerilimle bağlandığında bir diyot kontrollü bir voltaj seviyesi altında çalıştırılmalıdır. Bu güvenli voltaj aşılırsa, diyot zarar görür. Bu nedenle, bu maksimum voltajı bilmek çok önemlidir.
Diyotun tahrip edilmeden dayanabileceği maksimum ters voltaj olarak adlandırılır. Peak Inverse Voltage. Kısacası,PIV.
Burada PIV, Vm'den başka bir şey değildir
Form faktörü
Bu, dalga formu üzerindeki tüm noktaların mutlak değerlerinin matematiksel ortalaması olarak anlaşılabilir. form factorRMS değerinin ortalama değere oranı olarak tanımlanır. İle gösterilirF.
$$ F = \ frac {rms \: değer} {ortalama \: değer} = \ frac {I_m / 2} {I_m / \ pi} = \ frac {0.5I_m} {0.318I_m} = 1.57 $$
Tepe Faktörü
Düzeltmenin ne kadar etkili olduğunu bilmek için dalgalanmadaki tepe değerinin dikkate alınması gerekir. Tepe faktörünün değeri de önemli bir husustur.Peak factor tepe değerin RMS değerine oranı olarak tanımlanır.
Bu nedenle
$$ Tepe Faktörü = \ frac {Tepe \: değer} {rms \: değer} = \ frac {V_m} {V_m / 2} = 2 $$
Tüm bunlar, bir redresör üzerinde çalışırken dikkate alınması gereken önemli parametrelerdir.