Lý thuyết cộng hưởng thích ứng
Mạng này được phát triển bởi Stephen Grossberg và Gail Carpenter vào năm 1987. Nó dựa trên sự cạnh tranh và sử dụng mô hình học tập không giám sát. Các mạng của Lý thuyết Cộng hưởng Thích ứng (ART), như tên gọi cho thấy, luôn mở ra cho việc học mới (thích ứng) mà không làm mất đi các mô hình cũ (cộng hưởng). Về cơ bản, mạng ART là một bộ phân loại vectơ chấp nhận một vectơ đầu vào và phân loại nó thành một trong các loại tùy thuộc vào mẫu được lưu trữ mà nó giống nhất.
Điều hành chính
Hoạt động chính của phân loại ART có thể được chia thành các giai đoạn sau:
Recognition phase- Vectơ đầu vào được so sánh với phân loại được trình bày ở mọi nút trong lớp đầu ra. Đầu ra của nơ-ron trở thành “1” nếu nó phù hợp nhất với phân loại được áp dụng, nếu không nó trở thành “0”.
Comparison phase- Trong pha này, việc so sánh vector đầu vào với vector lớp so sánh được thực hiện. Điều kiện để đặt lại là mức độ giống nhau sẽ nhỏ hơn tham số cảnh giác.
Search phase- Trong đợt này, nhà mạng sẽ tìm kiếm reset cũng như trận đấu đã thực hiện ở các đợt trên. Do đó, nếu không có thiết lập lại và trận đấu khá tốt, thì phân loại kết thúc. Nếu không, quá trình sẽ được lặp lại và mẫu đã lưu khác phải được gửi đi để tìm kết quả phù hợp.
ART1
Nó là một loại ART, được thiết kế để phân cụm các vectơ nhị phân. Chúng ta có thể hiểu về điều này với kiến trúc của nó.
Kiến trúc của ART1
Nó bao gồm hai đơn vị sau:
Computational Unit - Nó được tạo thành từ những điều sau -
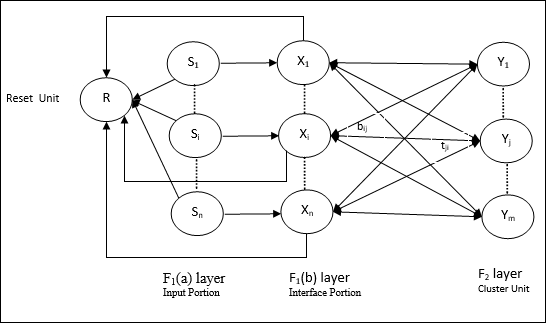
Input unit (F1 layer) - Nó còn có hai phần sau -
F1(a) layer (Input portion)- Trong ART1, sẽ không có xử lý trong phần này thay vì chỉ có các vectơ đầu vào. Nó được kết nối với lớp F 1 (b) (phần giao diện).
F1(b) layer (Interface portion)- Phần này kết hợp tín hiệu từ phần đầu vào với tín hiệu của lớp F 2 . Lớp F 1 (b) được kết nối với lớp F 2 thông qua các quả nặng từ dưới lênbijvà lớp F 2 được kết nối với lớp F 1 (b) thông qua các trọng lượng từ trên xuốngtji.
Cluster Unit (F2 layer)- Đây là tầng cạnh tranh. Đơn vị có đầu vào ròng lớn nhất được chọn để tìm hiểu kiểu đầu vào. Kích hoạt của tất cả các đơn vị cụm khác được đặt thành 0.
Reset Mechanism- Công việc của cơ chế này dựa trên sự giống nhau giữa trọng số từ trên xuống và vectơ đầu vào. Bây giờ, nếu mức độ tương tự này nhỏ hơn tham số cảnh giác, thì cụm không được phép tìm hiểu mẫu và phần còn lại sẽ xảy ra.
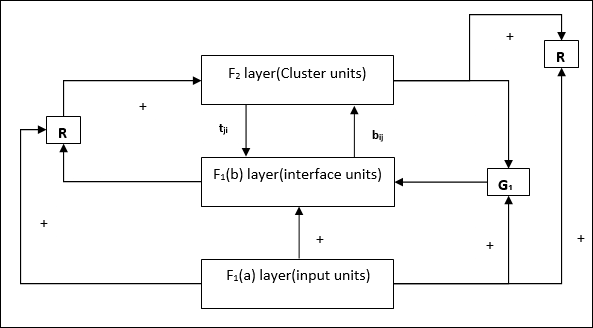
Supplement Unit - Thực ra vấn đề với cơ chế Reset là lớp F2phải bị ức chế trong những điều kiện nhất định và cũng phải sẵn sàng khi một số học tập xảy ra. Đó là lý do tại sao hai đơn vị bổ sung,G1 và G2 được thêm vào cùng với đơn vị đặt lại, R. Chúng được gọi làgain control units. Các đơn vị này nhận và gửi tín hiệu đến các đơn vị khác có trong mạng.‘+’ chỉ ra một tín hiệu kích thích, trong khi ‘−’ chỉ ra một tín hiệu ức chế.
Các thông số được sử dụng
Các thông số sau được sử dụng:
n - Số thành phần trong vector đầu vào
m - Số lượng cụm tối đa có thể được hình thành
bij- Trọng lượng từ lớp F 1 (b) đến lớp F 2 , tức là trọng lượng từ dưới lên
tji- Trọng lượng từ F 2 đến F 1 (b) lớp, tức là trọng lượng từ trên xuống
ρ - Tham số cảnh giác
||x|| - Định mức của vectơ x
Thuật toán
Step 1 - Khởi tạo tốc độ học, tham số cảnh giác và trọng số như sau:
$$ \ alpha \:> \: 1 \: \: và \: \: 0 \: <\ rho \: \ leq \: 1 $$
$$ 0 \: <\: b_ {ij} (0) \: <\: \ frac {\ alpha} {\ alpha \: - \: 1 \: + \: n} \: \: và \: \: t_ {ij} (0) \: = \: 1 $$
Step 2 - Tiếp tục bước 3-9, khi điều kiện dừng không đúng.
Step 3 - Tiếp tục bước 4-6 cho mọi đầu vào đào tạo.
Step 4- Đặt kích hoạt của tất cả các đơn vị F 1 (a) và F 1 như sau
F2 = 0 and F1(a) = input vectors
Step 5- Tín hiệu đầu vào từ lớp F 1 (a) đến lớp F 1 (b) phải được gửi như
$$ s_ {i} \: = \: x_ {i} $$
Step 6- Đối với mọi nút F 2 bị ức chế
$ y_ {j} \: = \: \ sum_i b_ {ij} x_ {i} $ điều kiện là yj ≠ -1
Step 7 - Thực hiện bước 8-10, khi thiết lập lại là đúng.
Step 8 - Tìm J cho yJ ≥ yj cho tất cả các nút j
Step 9- Một lần nữa tính toán kích hoạt trên F 1 (b) như sau
$$ x_ {i} \: = \: sitJi $$
Step 10 - Bây giờ, sau khi tính toán chuẩn của vector x và vector s, chúng ta cần kiểm tra điều kiện đặt lại như sau:
Nếu ||x||/ ||s|| <thông số cảnh giác ρ, Theninression node J và chuyển sang bước 7
Khác nếu ||x||/ ||s|| ≥ thông số cảnh giác ρ, sau đó tiến hành thêm.
Step 11 - Cập nhật trọng lượng cho nút J có thể được thực hiện như sau:
$$ b_ {ij} (mới) \: = \: \ frac {\ alpha x_ {i}} {\ alpha \: - \: 1 \: + \: || x ||} $$
$$ t_ {ij} (mới) \: = \: x_ {i} $$
Step 12 - Điều kiện dừng của thuật toán phải được kiểm tra và nó có thể như sau:
- Không có bất kỳ thay đổi nào về trọng lượng.
- Đặt lại không được thực hiện cho các đơn vị.
- Đã đạt đến số kỷ nguyên tối đa.