Arduino - स्टेपर मोटर
स्टेपर मोटर या स्टेप मोटर एक ब्रशलेस, सिंक्रोनस मोटर होती है, जो पूर्ण घुमाव को कई चरणों में विभाजित करती है। एक ब्रशलेस डीसी मोटर के विपरीत, जो लगातार घूमता है जब एक निश्चित डीसी वोल्टेज उस पर लागू होता है, एक कदम मोटर असतत चरण कोणों में घूमता है।
इसलिए स्टेपर मोटर्स को 12, 24, 72, 144, 180 और 200 की क्रांति के साथ निर्मित किया जाता है, जिसके परिणामस्वरूप 30, 15, 5, 2.5, 2 और 1.8 डिग्री प्रति चरण के कोण हैं। स्टेपर मोटर को प्रतिक्रिया के साथ या उसके बिना नियंत्रित किया जा सकता है।
आरसी हवाई जहाज पर मोटर की कल्पना करें। मोटर एक दिशा या किसी अन्य में बहुत तेजी से घूमती है। आप मोटर को दी गई शक्ति की मात्रा के साथ गति को भिन्न कर सकते हैं, लेकिन आप प्रोपेलर को किसी विशिष्ट स्थिति में रुकने के लिए नहीं कह सकते।
अब एक प्रिंटर की कल्पना करें। एक प्रिंटर के अंदर बहुत सारे मूविंग पार्ट्स होते हैं, जिनमें मोटर भी शामिल हैं। ऐसा ही एक मोटर पेपर फीड, कताई रोलर्स के रूप में कार्य करता है जो कागज के टुकड़े को स्याही के रूप में स्थानांतरित करता है। इस मोटर को पाठ की अगली पंक्ति या एक छवि की अगली पंक्ति को प्रिंट करने में सक्षम होने के लिए कागज को एक सटीक दूरी पर ले जाने में सक्षम होने की आवश्यकता है।
थ्रेडेड रॉड से जुड़ी एक और मोटर है जो प्रिंट हेड को आगे और पीछे ले जाती है। फिर, उस थ्रेडेड रॉड को एक के बाद एक अक्षर प्रिंट करने के लिए एक सटीक राशि को स्थानांतरित करने की आवश्यकता होती है। यह वह जगह है जहां स्टेपर मोटर्स काम में आते हैं।
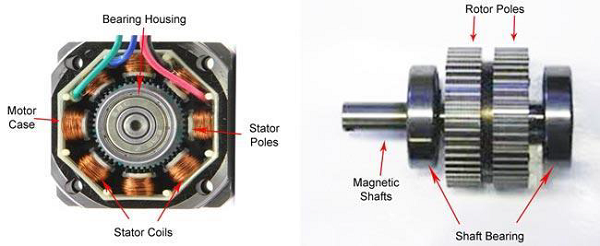
कैसे एक Stepper मोटर काम करता है?
एक नियमित डीसी मोटर केवल दिशा में घूमती है जबकि एक स्टेपर मोटर सटीक वेतन वृद्धि में स्पिन कर सकती है।
स्टेपर मोटर्स वांछित के रूप में डिग्री (या कदम) की एक सटीक राशि को बदल सकते हैं। यह आपको मोटर पर कुल नियंत्रण देता है, जिससे आप इसे एक सटीक स्थान पर ले जा सकते हैं और उस स्थिति को पकड़ सकते हैं। यह बहुत कम समय के लिए मोटर के अंदर कॉइल को शक्ति द्वारा ऐसा करता है। नुकसान यह है कि आपको उस स्थिति में रखने के लिए हर समय मोटर को बिजली देना होगा जो आप चाहते हैं।
अब आपको यह जानने की आवश्यकता है कि स्टेपर मोटर को स्थानांतरित करने के लिए, आप इसे एक दिशा या दूसरी दिशा में निश्चित संख्या में कदम बढ़ाने के लिए कहते हैं, और इसे उस दिशा में गति प्रदान करने के लिए गति बताएं। स्टेपर मोटर्स की कई किस्में हैं। यहां बताए गए तरीकों का उपयोग अन्य मोटर्स और ड्राइवरों का उपयोग करने के तरीके का पता लगाने के लिए किया जा सकता है जो इस ट्यूटोरियल में वर्णित नहीं हैं। हालाँकि, यह हमेशा अनुशंसा की जाती है कि आप अपने पास मौजूद मॉडल के लिए विशिष्ट मोटर और ड्राइवरों की डेटशीट और गाइड से परामर्श करें।
अवयव आवश्यक
आपको निम्नलिखित घटकों की आवश्यकता होगी -
- 1 × Arduino UNO बोर्ड
- 1 × छोटे द्विध्रुवी स्टेपर मोटर जैसा कि नीचे दी गई छवि में दिखाया गया है
- 1 × LM298 ड्राइविंग आईसी

प्रक्रिया
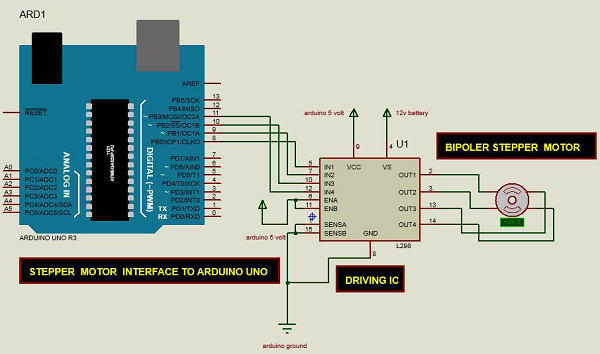
सर्किट आरेख का पालन करें और नीचे दी गई छवि में दिखाए अनुसार कनेक्शन बनाएं।
स्केच
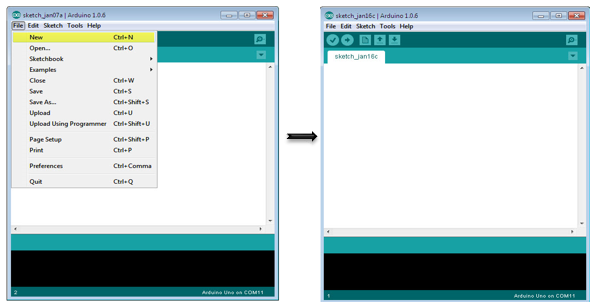
अपने कंप्यूटर पर Arduino IDE सॉफ्टवेयर खोलें। Arduino भाषा में कोडिंग आपके सर्किट को नियंत्रित करेगा। New पर क्लिक करके एक नया स्केच फाइल खोलें।
Arduino कोड
/* Stepper Motor Control */
#include <Stepper.h>
const int stepsPerRevolution = 90;
// change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(5);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(500);
// step one revolution in the other direction:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500);
}नोट करने के लिए कोड
यह कार्यक्रम एकध्रुवीय या द्विध्रुवीय स्टेपर मोटर चलाता है। मोटर Arduino के डिजिटल पिन 8 - 11 से जुड़ा हुआ है।
परिणाम
मोटर एक दिशा में एक क्रांति लेगी, फिर दूसरी दिशा में एक क्रांति।