レーダーシステム-追跡レーダー
1つまたは複数のターゲットの経路を追跡するために使用されるレーダーは、 Tracking Radar。一般に、追跡アクティビティを開始する前に、次の機能を実行します。
- ターゲット検出
- ターゲットの範囲
- 仰角と方位角を見つける
- ドップラー周波数シフトを見つける
したがって、追跡レーダーは、範囲、角度、ドップラー周波数シフトの3つのパラメーターのいずれかを追跡することによってターゲットを追跡します。ほとんどの追跡レーダーはprinciple of tracking in angle。それでは、角度追跡とは何かについて説明しましょう。
角度追跡
レーダーアンテナのペンシルビームは、角度の追跡を実行します。レーダーアンテナの軸を基準方向とします。ターゲットの方向と参照方向が同じでない場合は、angular error、これは2つの方向の違いに他なりません。
角度誤差信号がサーボ制御システムに適用されると、レーダーアンテナの軸がターゲットの方向に移動します。レーダーアンテナの軸とターゲットの方向の両方がcoincide角度誤差がゼロのとき。トラッキングレーダーには、角度誤差がゼロになるまで機能するフィードバックメカニズムがあります。
以下は two techniques、角度追跡で使用されます。
- シーケンシャルローブ
- コニカルスキャン
それでは、これら2つのテクニックについて1つずつ説明しましょう。
シーケンシャルローブ
ターゲットを追跡するためにアンテナビームが2つのパターン間で交互に切り替えられる場合、それは sequential lobing。シーケンシャルスイッチングおよびローブスイッチングとも呼ばれます。この手法は、1つの座標の角度誤差を見つけるために使用されます。角度誤差の大きさと方向の両方の詳細を示します。
次の図は、のシーケンシャルロビングの例を示しています。 polar coordinates。
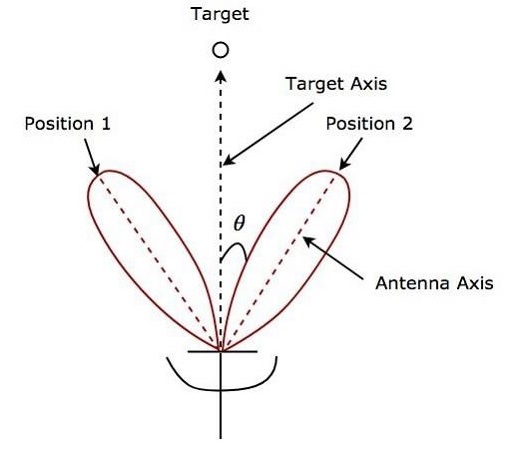
図に示すように、アンテナビームは位置1と位置2を交互に切り替えます。角度誤差θは上図に示されています。シーケンシャルロビングは、ターゲットの位置を高精度で提供します。これがメインですadvantage シーケンシャルロビングの。
コニカルスキャン
アンテナビームがターゲットを追跡するために継続的に回転する場合、それはと呼ばれます conical scanning。コニカルスキャン変調は、ターゲットの位置を見つけるために使用されます。次の図は、コニカルスキャンの例を示しています。

Squint angleはビーム軸と回転軸の間の角度であり、上図に示されています。ターゲットから得られたエコー信号は、アンテナビームが回転する周波数に等しい周波数で変調されます。
ターゲットの方向と回転軸の間の角度が決定します amplitude of the modulated signal。したがって、コニカルスキャン変調はエコー信号から抽出する必要があり、次にそれをサーボ制御システムに適用して、アンテナビーム軸をターゲットの方向に移動させます。