Obwody elektroniczne - szybki przewodnik
W elektronice mamy różne komponenty, które służą różnym celom. Istnieją różne elementy, które są używane w wielu typach obwodów w zależności od aplikacji.
Części elektroniczne
Podobnie jak cegła, która tworzy ścianę, komponent jest podstawową cegłą obwodu. ZAComponent to podstawowy element, który przyczynia się do rozwoju pomysłu w plik circuit do wykonania.
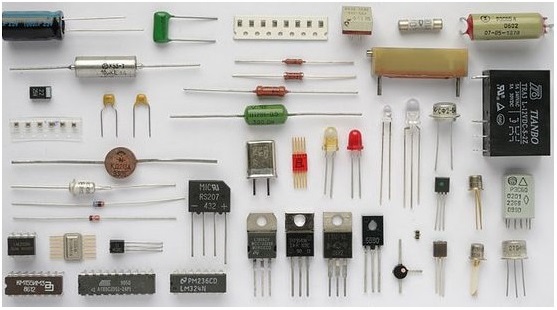
Każdy komponent ma kilka podstawowych właściwości i zachowuje się odpowiednio. Od motta dewelopera zależy wykorzystanie ich przy budowie planowanego obwodu. Poniższy obraz przedstawia kilka przykładów elementów elektronicznych używanych w różnych układach elektronicznych.
Aby zebrać pomysł, przyjrzyjmy się typom komponentów. Mogą byćActive Components lub Passive Components.
Aktywne komponenty
Składniki aktywne to takie, które przewodzą po dostarczeniu pewnej energii zewnętrznej.
Składniki aktywne wytwarzają energię w postaci napięcia lub prądu.
Examples - Diody, tranzystory, transformatory itp.
Komponenty pasywne
Komponenty pasywne to takie, które rozpoczynają działanie po połączeniu. Do ich działania nie jest potrzebna energia zewnętrzna.
Elementy pasywne przechowują i utrzymują energię w postaci napięcia lub prądu.
Examples - Rezystory, kondensatory, cewki itp.
Mamy też inną klasyfikację jako Linear i Non-Linear elementy.
Komponenty liniowe
Elementy lub komponenty liniowe to te, które mają liniową zależność między prądem a napięciem.
Parametry elementów liniowych nie ulegają zmianie w zakresie prądu i napięcia.
Examples - Diody, tranzystory, transformatory itp.
Komponenty nieliniowe
Elementy lub komponenty nieliniowe to te, które mają nieliniową zależność między prądem a napięciem.
Parametry elementów nieliniowych zmieniają się w zależności od prądu i napięcia.
Examples - Rezystory, kondensatory, cewki itp.
Są to komponenty przeznaczone do różnych celów, które łącznie mogą wykonać preferowane zadanie, do którego zostały zbudowane. Taka kombinacja różnych komponentów jest znana jakoCircuit.
Elektroniczne obwody
Pewna liczba komponentów podłączonych do celu w określony sposób tworzy circuit. Obwód to sieć różnych elementów. Istnieją różne typy obwodów.
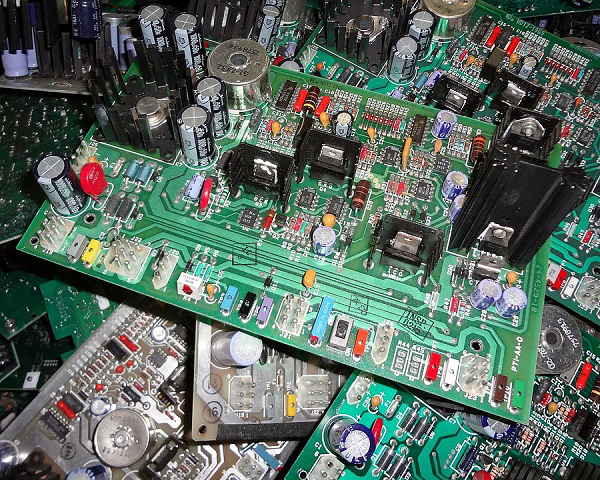
Poniższy obraz przedstawia różne typy obwodów elektronicznych. Pokazuje płytki drukowane, które są grupą obwodów elektronicznych połączonych na płytce.
Obwody elektroniczne można pogrupować w różne kategorie w zależności od ich działania, połączenia, budowy itp. Porozmawiajmy więcej o typach obwodów elektronicznych.
Aktywny obwód
Obwód zbudowany przy użyciu aktywnych składników nosi nazwę Active Circuit.
Zwykle zawiera źródło zasilania, z którego obwód pobiera więcej mocy i dostarcza ją do obciążenia.
Dodatkowa moc jest dodawana do wyjścia, a zatem moc wyjściowa jest zawsze większa niż zastosowana moc wejściowa.
Zysk mocy zawsze będzie większy niż jedność.
Obwód pasywny
Obwód zbudowany przy użyciu komponentów pasywnych nosi nazwę Passive Circuit.
Nawet jeśli zawiera źródło zasilania, obwód nie pobiera żadnej mocy.
Dodatkowa moc nie jest dodawana do wyjścia, dlatego moc wyjściowa jest zawsze mniejsza niż zastosowana moc wejściowa.
Zysk mocy zawsze będzie mniejszy niż jedność.
Obwody elektroniczne można również sklasyfikować jako Analog, Digitallub Mixed.
Obwód analogowy
Obwód analogowy może być taki, który zawiera elementy liniowe. Stąd jest to obwód liniowy.
Obwód analogowy ma analogowe wejścia sygnałowe, które mają ciągły zakres napięć.
Obwód cyfrowy
Obwód cyfrowy może być taki, który zawiera elementy nieliniowe. Dlatego jest to układ nieliniowy.
Może przetwarzać tylko sygnały cyfrowe.
Obwód cyfrowy ma cyfrowe wejścia sygnałowe, które są wartościami dyskretnymi.
Obwód sygnałów mieszanych
Obwód sygnału mieszanego może mieć zarówno składową liniową, jak i nieliniową. Dlatego nazywa się to obwodem sygnału mieszanego.
Obwody te składają się z obwodów analogowych wraz z mikroprocesorami do przetwarzania danych wejściowych.
W zależności od typu połączenia obwody można sklasyfikować jako Series Circuit lub Parallel Circuit. Obwód szeregowy to taki, który jest połączony szeregowo iparallel circuit to taki, którego elementy są połączone równolegle.
Teraz, gdy mamy już podstawowe pojęcie o elementach elektronicznych, przejdźmy dalej i omówmy ich przeznaczenie, które pomoże nam zbudować lepsze obwody do różnych zastosowań. Bez względu na cel obwodu elektronicznego (przetwarzanie, wysyłanie, odbieranie, analizowanie), proces odbywa się w postaci sygnałów. W następnym rozdziale omówimy sygnały i rodzaje sygnałów występujących w obwodach elektronicznych.
ZA Signalmożna rozumieć jako „reprezentację, która zawiera pewne informacje o danych obecnych u źródła, z którego została utworzona”. Jest to zwykle zależne od czasu. Stąd sygnał może byćsource of energy which transmits some information. Można to łatwo przedstawić na wykresie.
Przykłady
- Alarm daje sygnał, że już czas.
- Gwizdek kuchenki potwierdza gotowanie potrawy.
- Czerwone światło sygnalizuje pewne niebezpieczeństwo.
- Sygnał drogowy wskazuje Twój ruch.
- Telefon dzwoni, sygnalizując połączenie.
Sygnał może być dowolnego typu, który przekazuje pewne informacje. Ten sygnał wytwarzany przez sprzęt elektroniczny nosi nazwęElectronic Signal lub Electrical Signal. Są to na ogół warianty czasowe.
Rodzaje sygnałów
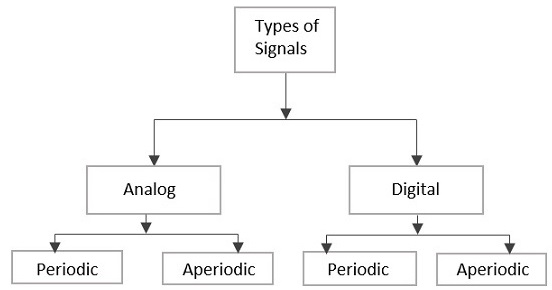
Sygnały można sklasyfikować jako analogowe lub cyfrowe, w zależności od ich charakterystyki. Sygnały analogowe i cyfrowe można dalej klasyfikować, jak pokazano na poniższej ilustracji.
Sygnał analogowy
Ciągły sygnał zmieniający się w czasie, który reprezentuje wielkość zmieniającą się w czasie, można określić jako Analog Signal. Sygnał ten zmienia się w czasie, zgodnie z chwilowymi wartościami wielkości, która go reprezentuje.
Sygnał cyfrowy
Sygnał, który jest discrete w naturze lub która jest non-continuous w formie można określić jako Digital signal. Ten sygnał ma indywidualne wartości, oznaczone osobno, które nie są oparte na poprzednich wartościach, tak jakby były wyprowadzone w tym konkretnym momencie.
Sygnał okresowy i sygnał okresowy
Każdy sygnał analogowy lub cyfrowy, który powtarza swój wzór przez pewien czas, nazywany jest jako Periodic Signal. Ten sygnał ma swój wzór powtarzany wielokrotnie i można go łatwo założyć lub obliczyć.
Każdy sygnał analogowy lub cyfrowy, który nie powtarza swojego wzoru przez pewien czas, nazywany jest as Aperiodic Signal. Ten sygnał ma swój wzór, ale wzór się nie powtarza i nie jest tak łatwy do przyjęcia ani do obliczenia.
Sygnały i zapisy
Spośród Periodic Signals, najczęściej używanymi sygnałami są sinusoida, cosinus, trójkątny, prostokątny, prostokątny, piłokształtny, impulsowy lub ciąg impulsów itp., przyjrzyjmy się tym przebiegom.
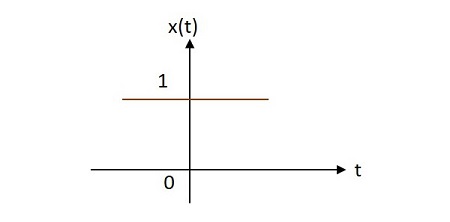
Sygnał kroku jednostki
Sygnał kroku jednostkowego ma wartość jednej jednostki od początku do jednej jednostki na osi X. Jest to najczęściej używane jako sygnał testowy. Obraz sygnału kroku jednostki jest pokazany poniżej.
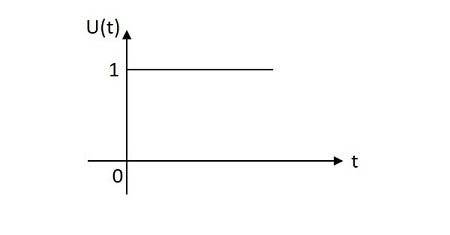
Funkcja kroku jednostkowego jest oznaczona przez $u\left ( t \right )$. Jest definiowany jako -
$$ u \ left (t \ right) = \ left \ {\ begin {matrix} 1 & t \ geq 0 \\ 0 & t <0 \ end {matrix} \ right. $$
Sygnał impulsowy jednostki
Jednostkowy sygnał impulsowy ma wartość jednej jednostki na początku. Jego powierzchnia to jedna jednostka. Obraz sygnału impulsowego urządzenia pokazano poniżej.
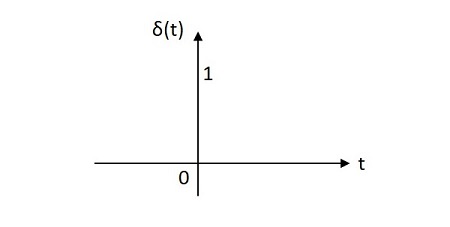
Jednostkową funkcję impulsu oznaczono ẟ(t). Jest zdefiniowany jako
$$\delta \left ( t \right )=\left\{\begin{matrix} \infty \:\:if \:\:t=0\\0 \:\:if \:\:t\neq 0\end{matrix}\right.$$
$$\int_{-\infty }^{\infty }\delta \left ( t \right )d\left ( t \right )=1$$
$$\int_{-\infty }^{t }\delta \left ( t \right )d\left ( t \right )=u\left ( t \right )$$
$$\delta \left ( t \right )=\frac{du\left ( t \right )}{d\left ( t \right )} $$
Sygnał rampy jednostki
Wartość jednostkowego sygnału rampy rośnie wykładniczo od początku. Obraz sygnału rampy jednostki pokazano poniżej.
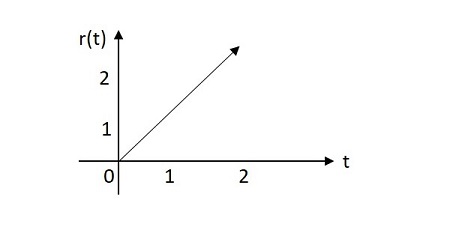
Jednostkowa funkcja rampy jest oznaczona przez u(t). Jest definiowany jako -
$$\int_{0}^{t}u\left ( t \right ) d\left ( t \right )=\int_{0}^{t} 1 dt =t=r\left ( t \right )$$
$$u\left ( t \right )=\frac{dr\left ( t \right )}{dt}$$
Jednostkowy sygnał paraboliczny
Jednostkowy sygnał paraboliczny ma swoją wartość zmieniającą się jak parabola u jego początku. Obraz sygnału parabolicznego jednostki pokazano poniżej.
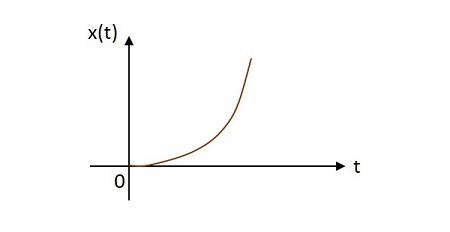
Jednostkowa funkcja paraboliczna jest oznaczona przez $u\left ( t \right )$. Jest definiowany jako -
$$\int_{0}^{t}\int_{0}^{t}u\left ( t \right )dtdt=\int_{0}^{t}r\left ( t \right )dt=\int_{0}^{t} t.dt=\frac{t^{2}}{2}dt=x\left ( t \right )$$
$$r\left ( t \right )=\frac{dx\left ( t \right )}{dt}$$
$$u\left ( t \right )=\frac{d^{2}x\left ( t \right )}{dt^{2}}$$
Funkcja Signum
Funkcja Signum ma swoją wartość równomiernie rozłożoną w obu płaszczyznach dodatnich i ujemnych od początku. Obraz funkcji Signum pokazano poniżej.
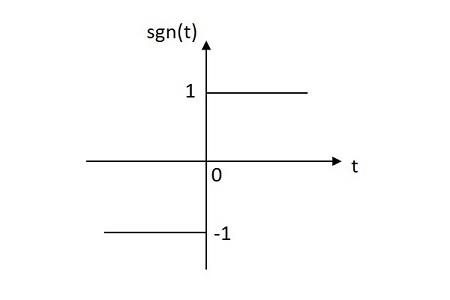
Funkcja Signum jest oznaczona przez sgn(t). Jest zdefiniowany jako
$$ sgn \ left (t \ right) = \ left \ {\ begin {matrix} 1 \: \: for \: \: t \ geq 0 \\ - 1 \: \: for \: \: t <0 \ end {matrix} \ right. $$
$$sgn\left ( t \right )=2u\left ( t \right ) -1$$
Sygnał wykładniczy
Sygnał wykładniczy ma wartość zmieniającą się wykładniczo w stosunku do jego pochodzenia. Funkcja wykładnicza ma postać -
$$x\left ( t \right ) =e^{\alpha t}$$
Kształt wykładniczy można zdefiniować za pomocą $\alpha$. Funkcję tę można zrozumieć w 3 przypadkach
Case 1 -
Gdyby $\alpha = 0\rightarrow x\left ( t \right )=e^{0}=1$
Case 2 -
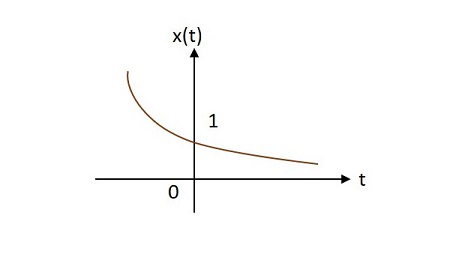
Jeśli $ \ alpha <0 $ to $x\left ( t \right )=e^{\alpha t}$ gdzie $\alpha$jest negatywna. Ten kształt nazywa siędecaying exponential.
Case 3 -
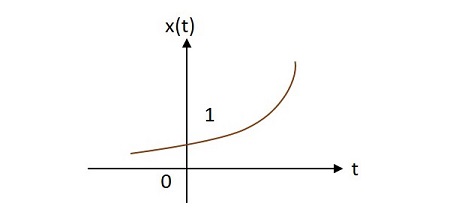
Gdyby $\alpha > 0$ następnie $x\left ( t \right )=e^{\alpha t}$ gdzie $\alpha$jest pozytywna. Ten kształt nazywa sięraising exponential.
Sygnał prostokątny
Sygnał prostokątny ma swoją wartość rozłożoną w kształcie prostokąta zarówno w płaszczyźnie dodatniej, jak i ujemnej od początku. Obraz sygnału prostokątnego pokazano poniżej.
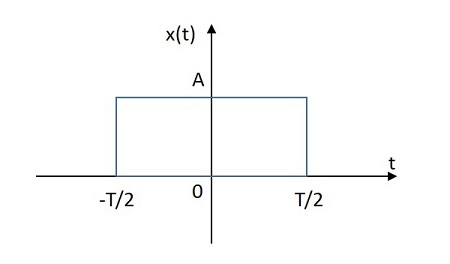
Funkcja prostokątna jest oznaczona przez $x\left ( t \right )$. Jest zdefiniowany jako
$$x\left ( t \right )=A \:rect\left [ \frac{t}{T} \right ]$$
Trójkątny sygnał
Sygnał prostokątny ma swoją wartość rozłożoną w kształcie trójkąta zarówno w płaszczyźnie dodatniej, jak i ujemnej od początku. Obraz sygnału trójkątnego pokazano poniżej.
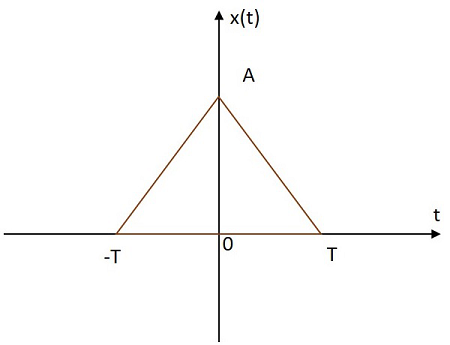
Funkcja trójkątna jest oznaczona przez$x\left ( t \right )$. Jest zdefiniowany jako
$$x\left ( t \right )=A \left [ 1-\frac{\left | t \right |}{T} \right ]$$
Sygnał sinusoidalny
Sygnał sinusoidalny ma swoją wartość zmieniającą się sinusoidalnie od jego pochodzenia. Obraz sygnału sinusoidalnego pokazano poniżej.
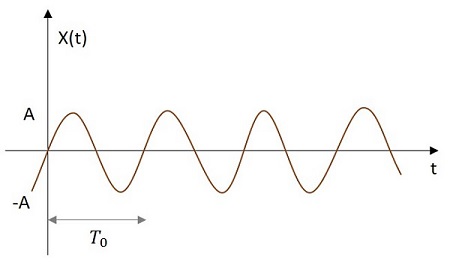
Funkcja sinusoidalna jest oznaczona przez x (t). Jest definiowany jako -
$$x\left ( t \right )=A \cos \left ( w_{0} t\pm \phi \right )$$
lub
$$x\left ( t \right )=A sin\left ( w_{0}t\pm \phi \right )$$
Gdzie $T_{0}=\frac{2 \pi}{w_{0}}$
Funkcja Sinc
Sygnał Sinc ma wartość zmieniającą się zgodnie z określoną zależnością, jak w poniższym równaniu. Ma swoją maksymalną wartość u źródła i zmniejsza się, gdy się oddala. Obraz sygnału funkcji Sinc pokazano poniżej.
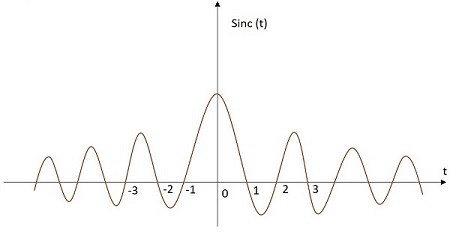
Funkcja Sinc jest oznaczona przez sinc(t). Jest definiowany jako -
$$sinc\left ( t \right )=\frac{sin\left ( \pi t \right )}{\pi t}$$
Są to więc różne sygnały, z którymi najczęściej spotykamy się w dziedzinie elektroniki i komunikacji. Każdy sygnał można zdefiniować w równaniu matematycznym, aby ułatwić analizę sygnału.
Każdy sygnał ma określony kształt fali, jak wspomniano wcześniej. Kształtowanie fali może zmienić zawartość obecną w sygnale. W każdym razie decyzja należy do projektanta, czy zmienić falę, czy nie, dla konkretnego obwodu. Ale aby zmienić kształt fali, istnieje kilka technik, które zostaną omówione w dalszych rozdziałach
Sygnał można również nazwać jako Wave. Każda fala ma określony kształt, gdy jest przedstawiona na wykresie. Ten kształt może mieć różne typy, takie jak sinusoidalny, kwadratowy, trójkątny itp., Które różnią się w zależności od okresu lub mogą mieć pewne losowe kształty niezależnie od okresu czasu.
Rodzaje kształtowania fal
Istnieją dwa główne typy kształtowania fali. Oni są -
- Liniowe kształtowanie fali
- Nieliniowe kształtowanie fali
Liniowe kształtowanie fal
Elementy liniowe, takie jak rezystory, kondensatory i cewki indukcyjne, służą do kształtowania sygnału w tym liniowym kształtowaniu fali. Wejście sinusoidalne ma wyjście fali sinusoidalnej, a zatem wejścia niesinusoidalne są częściej wykorzystywane do zrozumienia liniowego kształtowania fali.
Filtering jest procesem tłumienia niepożądanego sygnału lub odtwarzania wybranych części składowych częstotliwości konkretnego sygnału.
Filtry
W procesie kształtowania sygnału, jeśli niektóre fragmenty sygnału są niepożądane, można je odciąć za pomocą obwodu filtrującego. A Filter is a circuit that can remove unwanted portions of a signal at its input. Proces zmniejszania siły sygnału jest również określany jakoAttenuation.
Mamy kilka komponentów, które pomagają nam w technikach filtrowania.
ZA Capacitor ma właściwość do allow AC i do block DC
Na Inductor ma właściwość do allow DC ale blocks AC.
Korzystając z tych właściwości, te dwa komponenty są szczególnie używane do blokowania lub zezwalania AC lub DC. Filtry można zaprojektować w zależności od tych właściwości.
Mamy cztery główne typy filtrów -
- Filtr dolnoprzepustowy
- Filtr górnoprzepustowy
- Filtr pasmowy
- Filtr pasmowy
Omówmy teraz szczegółowo te typy filtrów.
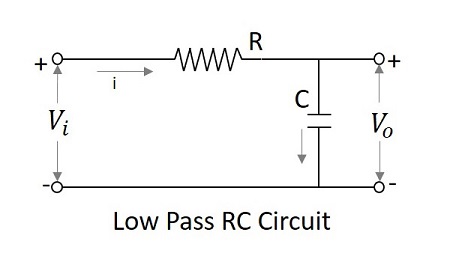
Filtr dolnoprzepustowy
Obwód filtru, który pozwala na zestaw częstotliwości poniżej określonej wartości, można określić jako Low pass filter. Ten filtr przepuszcza niższe częstotliwości. Schemat obwodu filtra dolnoprzepustowego wykorzystującego RC i RL jest taki, jak pokazano poniżej.
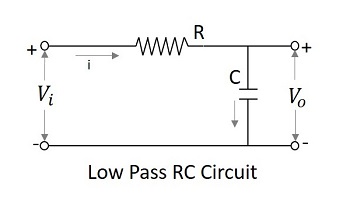
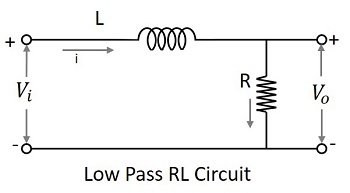
Filtr kondensatora lub RC filtr i filtr induktora lub filtr RL działają jako filtry dolnoprzepustowe.
The RC filter- Ponieważ kondensator jest umieszczony w boczniku, prąd przemienny, na który pozwala, jest uziemiony. To omija wszystkie komponenty o wysokiej częstotliwości, jednocześnie dopuszczając prąd stały na wyjściu.
The RL filter- Ponieważ cewka jest umieszczona szeregowo, prąd stały jest wpuszczany na wyjście. Cewka blokuje prąd zmienny, który nie jest dozwolony na wyjściu.
Symbol filtra dolnoprzepustowego (LPF) przedstawiono poniżej.
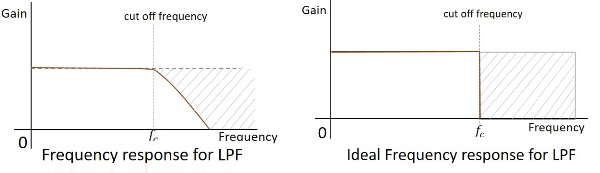
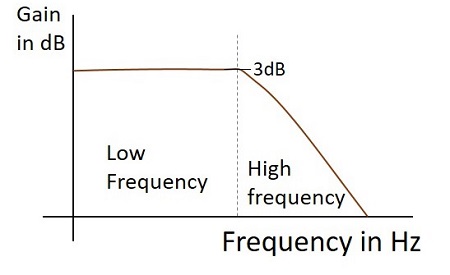
Pasmo przenoszenia
Odpowiedź częstotliwościowa praktycznego filtra jest pokazana poniżej, a odpowiedź częstotliwościowa idealnego LPF, gdy nie są brane pod uwagę praktyczne względy elementów elektronicznych, będzie następująca.
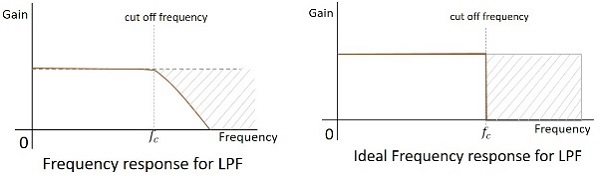
Częstotliwość odcięcia dla dowolnego filtra to częstotliwość krytyczna $f_{c}$dla których filtr ma osłabiać (przecinać) sygnał. Idealny filtr ma doskonałe odcięcie, a praktyczny ma kilka ograniczeń.
Filtr RLC
Wiedząc o filtrach RC i RL, można pomyśleć, że dobrze byłoby dodać te dwa obwody, aby uzyskać lepszą odpowiedź. Poniższy rysunek pokazuje, jak wygląda obwód RLC.
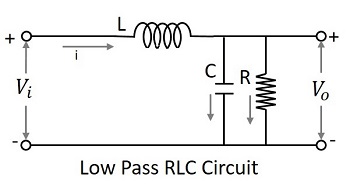
Sygnał na wejściu przechodzi przez cewkę, która blokuje prąd przemienny i dopuszcza prąd stały. Teraz to wyjście jest ponownie przepuszczane przez kondensator w boczniku, który uziemia pozostałą składową prądu przemiennego, jeśli występuje, obecną w sygnale, zezwalając na prąd stały na wyjściu. Tak więc na wyjściu mamy czysty DC. To lepszy obwód dolnoprzepustowy niż oba.
Filtr górnoprzepustowy
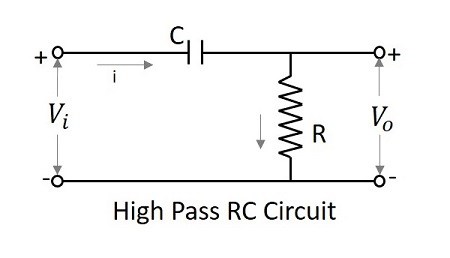
Obwód filtrujący, który dopuszcza zestaw częstotliwości, które są above a specified value można określić jako High pass filter. Ten filtr przepuszcza wyższe częstotliwości. Schemat obwodu filtra górnoprzepustowego wykorzystującego RC i RL przedstawiono poniżej.
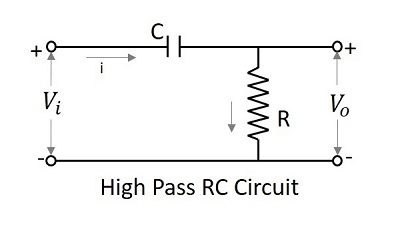
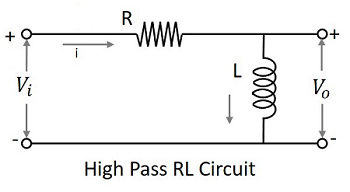
Filtr kondensatora lub RC filtr i filtr induktora lub RL filtry działają jak filtry górnoprzepustowe.
Filtr RC
Ponieważ kondensator jest umieszczony szeregowo, blokuje składowe prądu stałego i pozwala komponentom prądu przemiennego na wyjście. Stąd składowe o wysokiej częstotliwości pojawiają się na wyjściu na rezystorze.
Filtr RL
Ponieważ cewka indukcyjna jest umieszczona w boczniku, DC może być uziemiony. Na wyjściu pojawi się pozostały składnik AC. Symbol filtra górnoprzepustowego (HPF) podano poniżej.
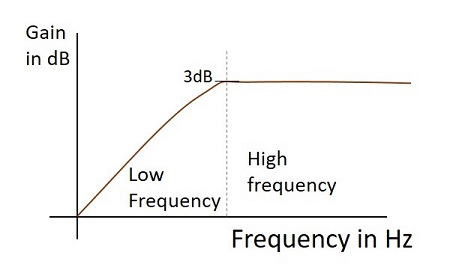
Pasmo przenoszenia
Odpowiedź częstotliwościowa praktycznego filtra jest pokazana poniżej, a odpowiedź częstotliwościowa idealnego HPF, gdy nie są brane pod uwagę praktyczne względy elementów elektronicznych, będzie następująca.
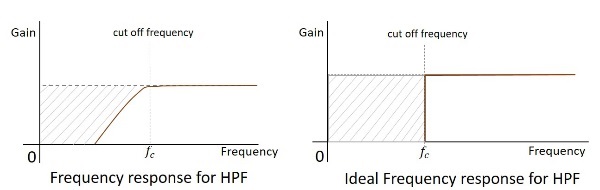
Częstotliwość odcięcia dla dowolnego filtra to częstotliwość krytyczna $f_{c}$dla których filtr ma osłabiać (przecinać) sygnał. Idealny filtr ma doskonałe odcięcie, a praktyczny ma kilka ograniczeń.
Filtr RLC
Wiedząc o filtrach RC i RL, można pomyśleć, że dobrze byłoby dodać te dwa obwody, aby uzyskać lepszą odpowiedź. Poniższy rysunek pokazuje, jak wygląda obwód RLC.

Sygnał na wejściu przechodzi przez kondensator, który blokuje prąd stały i dopuszcza prąd zmienny. Teraz to wyjście jest ponownie przepuszczane przez cewkę indukcyjną w boczniku, która uziemia pozostałą składową DC, jeśli występuje, obecną w sygnale, zezwalając na prąd zmienny na wyjściu. Tak więc na wyjściu mamy czyste AC. To lepszy obwód górnoprzepustowy niż oba.
Filtr pasmowoprzepustowy
Obwód filtrujący, który dopuszcza zestaw częstotliwości, które są between two specified values można określić jako Band pass filter. Ten filtr przepuszcza pasmo częstotliwości.
Ponieważ musimy wyeliminować kilka niskich i wysokich częstotliwości, aby wybrać zestaw określonych częstotliwości, musimy kaskadować HPF i LPF, aby uzyskać BPF. Można to łatwo zrozumieć, nawet obserwując krzywe odpowiedzi częstotliwościowej.
Schemat obwodu filtra środkowoprzepustowego przedstawiono poniżej.
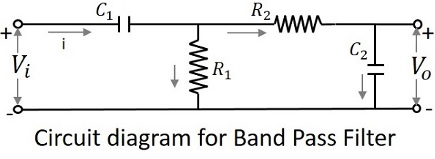
Powyższy obwód można również zbudować z wykorzystaniem obwodów RL lub RLC. Powyższy obwód to obwód RC wybrany do prostego zrozumienia.
Symbol filtra pasmowoprzepustowego (BPF) podano poniżej.
Pasmo przenoszenia
Odpowiedź częstotliwościowa praktycznego filtra jest taka, jak pokazano poniżej, a odpowiedź częstotliwościowa idealnego BPF, gdy nie są brane pod uwagę praktyczne względy komponentów elektronicznych, będzie następująca.
Częstotliwość odcięcia dla dowolnego filtra to częstotliwość krytyczna $f_{c}$dla których filtr ma osłabiać (przecinać) sygnał. Idealny filtr ma doskonałe odcięcie, a praktyczny ma kilka ograniczeń.
Filtr pasmowy
Obwód filtrujący, który blokuje lub tłumi zestaw częstotliwości, które są between two specified values można określić jako Band Stop filter. Ten filtr odrzuca pasmo częstotliwości i dlatego można go również nazwać jakoBand Reject Filter.
Ponieważ musimy wyeliminować kilka niskich i wysokich częstotliwości, aby wybrać zestaw określonych częstotliwości, musimy kaskadować LPF i HPF, aby uzyskać BSF. Można to łatwo zrozumieć, nawet obserwując krzywe odpowiedzi częstotliwościowej.
Schemat obwodu filtra pasmowego jest pokazany poniżej.
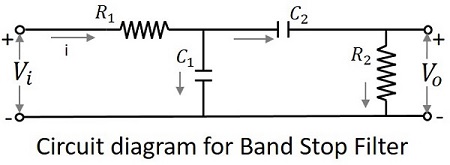
Powyższy obwód można również zbudować z wykorzystaniem obwodów RL lub RLC. Powyższy obwód to obwód RC wybrany do prostego zrozumienia.
Symbol pasmowego filtru zatrzymującego (BSF) podano poniżej.
Pasmo przenoszenia
Odpowiedź częstotliwościowa praktycznego filtra jest taka, jak pokazano poniżej, a odpowiedź częstotliwościowa idealnego BSF, gdy nie uwzględnia się praktycznych aspektów elementów elektronicznych, będzie następująca.
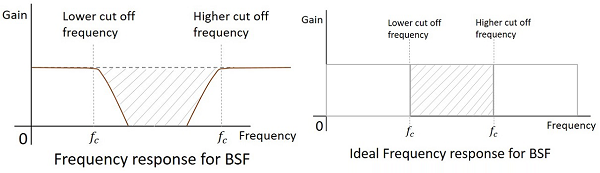
Częstotliwość odcięcia dla dowolnego filtra to częstotliwość krytyczna $f_{c}$dla których filtr ma osłabiać (przecinać) sygnał. Idealny filtr ma doskonałe odcięcie, a praktyczny ma kilka ograniczeń.
Obwody filtrów dolnoprzepustowych i górnoprzepustowych są używane jako obwody specjalne w wielu zastosowaniach. Filtr dolnoprzepustowy (LPF) może działać jakoIntegrator, podczas gdy filtr górnoprzepustowy (HPF) może działać jako Differentiator. Te dwie funkcje matematyczne są możliwe tylko w przypadku tych obwodów, które zmniejszają wysiłek inżyniera elektronika w wielu zastosowaniach.
Filtr dolnoprzepustowy jako integrator
Przy niskich częstotliwościach reaktancja pojemnościowa staje się nieskończona, a przy wysokich częstotliwościach reaktancja staje się zerowa. Stąd przy niskich częstotliwościach LPF ma skończoną moc wyjściową, a przy wysokich częstotliwościach wyjście jest zerowe, co jest takie samo dla obwodu integratora. Stąd można powiedzieć, że filtr dolnoprzepustowy działa jakointegrator.
Aby LPF zachowywał się jak integrator
$$\tau \gg T$$
Gdzie $\tau = RC$ stała czasowa obwodu
Wtedy zmiana napięcia w C jest bardzo mała.
$$V_{i}=iR+\frac{1}{C} \int i \:dt$$
$$V_{i}\cong iR$$
$$Since \:\: \frac{1}{C} \int i \:dt \ll iR$$
$$i=\frac{V_{i}}{R}$$
$$ Since \:\: V_{0}=\frac{1}{C}\int i dt =\frac{1}{RC}\int V_{i}dt=\frac{1}{\tau }\int V_{i} dt$$
$$Output \propto \int input$$
Stąd LPF o dużej stałej czasowej wytwarza sygnał wyjściowy, który jest proporcjonalny do całki wejścia.
Pasmo przenoszenia
Odpowiedź częstotliwościowa praktycznego filtra dolnoprzepustowego, gdy działa jako integrator, jest taka, jak pokazano poniżej.
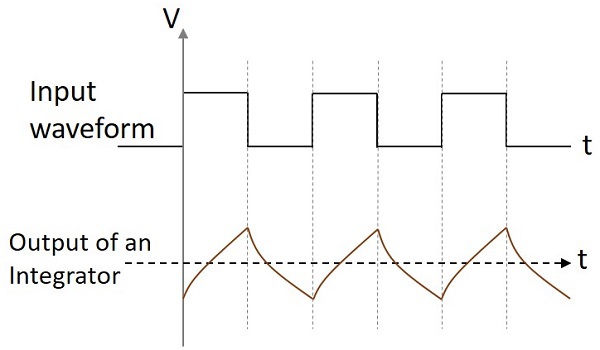
Przebieg wyjściowy
Jeśli obwód integratora ma wejście sinusoidalne, na wyjściu będzie przebieg cosinusoidalny. Jeśli wejście jest prostokątne, przebieg wyjściowy zmienia swój kształt i wygląda jak na poniższym rysunku.
Filtr górnoprzepustowy jako element różnicowy
Przy niskich częstotliwościach sygnał wyjściowy wyróżniacza wynosi zero, podczas gdy przy wysokich częstotliwościach jego sygnał wyjściowy ma pewną skończoną wartość. To jest to samo, co dla wyróżnika. Stąd mówi się, że filtr górnoprzepustowy zachowuje się jak element różnicowy.
Jeżeli stała czasowa RC HPF jest znacznie mniejsza niż okres czasu sygnału wejściowego, wówczas obwód zachowuje się jak element różniczkujący. Wtedy spadek napięcia na R jest bardzo mały w porównaniu ze spadkiem na C.
$$V_{i}=\frac{1}{C}\int i \:dt +iR$$
Ale $iR=V_{0}$ jest mały
$$since V_{i}=\frac{1}{C}\int i \:dt$$
$$i=\frac{V_{0}}{R}$$
$$Since \: V_{i} =\frac{1}{\tau }\int V_{0} \:dt$$
Gdzie $\tau =RC$ stała czasowa obwodu.
Różnicowanie po obu stronach,
$$\frac{dV_{i}}{dt}=\frac{V_0}{\tau }$$
$$V_{0}=\tau \frac{dV_{i}}{dt}$$
$$Since \:V_{0}\propto \frac{dV_{i}}{dt}$$
Wyjście jest proporcjonalne do różnicy sygnału wejściowego.
Pasmo przenoszenia
Odpowiedź częstotliwościowa praktycznego filtra górnoprzepustowego, gdy działa jako różnicowy, jest pokazana poniżej.
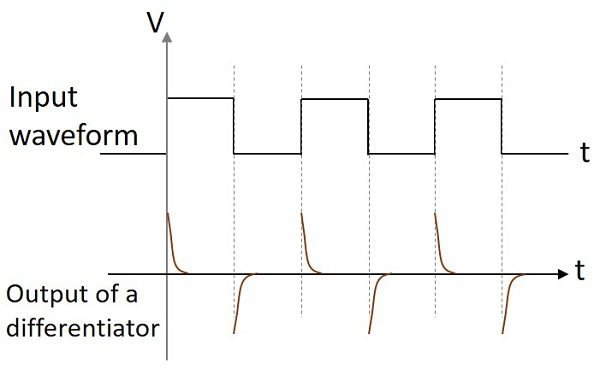
Forma fali wyjściowej
Jeśli obwód różniczkujący ma wejście sinusoidalne, na wyjściu będzie przebieg cosinusoidalny. Jeśli wejście jest prostokątne, przebieg wyjściowy zmienia swój kształt i wygląda jak na poniższym rysunku.
Te dwa obwody są najczęściej używane w różnych zastosowaniach elektronicznych. Obwód różnicowy wytwarza stałe napięcie wyjściowe, gdy stosowane wejście ma tendencję do stabilnej zmiany. Obwód integratora wytwarza stale zmieniające się napięcie wyjściowe, gdy przyłożone napięcie wejściowe jest stałe.
Wraz z rezystorami elementy nieliniowe, takie jak diodessą używane w nieliniowych obwodach kształtujących fale, aby uzyskać wymagane zmienione wyjścia. Albo kształt fali jest tłumiony, albo poziom prądu stałego fali jest zmieniany w nieliniowym kształtowaniu fali.
Proces wytwarzania niesinusoidalnych przebiegów wyjściowych z sinusoidalnego sygnału wejściowego przy użyciu elementów nieliniowych nazywa się nonlinear wave shaping.
Obwody Clipper
Obwód Clippera to obwód, który rejects the part fali wejściowej określonej while allowing the remainingczęść. Część fali powyżej lub poniżej określonego napięcia odcięcia jest odcinana lub odcinana.
Obwody obcinania składają się z elementów liniowych i nieliniowych, takich jak rezystory i diody, ale nie z elementów magazynujących energię, takich jak kondensatory. Te obwody obcinania mają wiele zastosowań, ponieważ są korzystne.
Główną zaletą obwodów obcinających jest eliminacja niepożądanego szumu występującego w amplitudach.
Mogą one działać jako konwertery fal prostokątnych, ponieważ mogą przekształcić fale sinusoidalne w fale prostokątne przez obcinanie.
Amplituda żądanej fali może być utrzymywana na stałym poziomie.
Wśród obcinaczy diodowych są dwa główne typy positive i negative clippers. Omówimy te dwa typy maszynek do strzyżenia w następnych dwóch rozdziałach.
Obwód Clipper, który jest przeznaczony do tłumienia dodatnich części sygnału wejściowego, można określić jako Positive Clipper. Wśród obwodów obcinacza diod dodatnich mamy następujące typy -
- Clipper z serii pozytywnej
- Clipper z serii pozytywnej z pozytywem $V_{r}$ (napięcie odniesienia)
- Clipper z serii pozytywnej z negatywem $V_{r}$
- Strzyżarka z dodatnim bocznikiem
- Pozytywna maszynka do strzyżenia boczków z pozytywem $V_{r}$
- Dodatnia strzyżarka bocznikowa z negatywem $V_{r}$
Omówmy szczegółowo każdy z tych typów.
Clipper z serii pozytywnej
Obwód Clipper, w którym dioda jest połączona szeregowo z sygnałem wejściowym i który osłabia dodatnie części przebiegu, jest określany jako Positive Series Clipper. Poniższy rysunek przedstawia schemat połączeń dla maszynki do strzyżenia serii dodatniej.

Positive Cycle of the Input- Po przyłożeniu napięcia wejściowego, dodatni cykl wejścia powoduje, że punkt A w obwodzie jest dodatni w stosunku do punktu B. To powoduje, że dioda jest spolaryzowana odwrotnie, a zatem zachowuje się jak otwarty przełącznik. W ten sposób napięcie na rezystorze obciążenia spada do zera, ponieważ nie przepływa przez niego prąd, a zatem$V_{0}$ będzie wynosić zero.
Negative Cycle of the Input- Cykl ujemny wejścia powoduje, że punkt A w obwodzie jest ujemny w stosunku do punktu B. To powoduje, że dioda jest spolaryzowana do przodu, a tym samym przewodzi jak zamknięty przełącznik. Zatem napięcie na rezystorze obciążającym będzie równe przyłożonemu napięciu wejściowemu, gdy całkowicie pojawia się na wyjściu$V_{0}$.
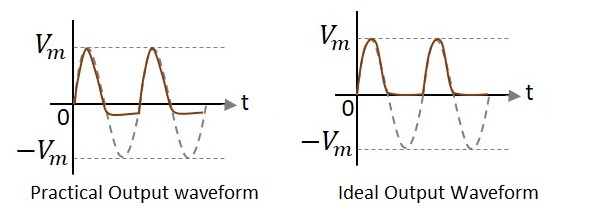
Przebiegi
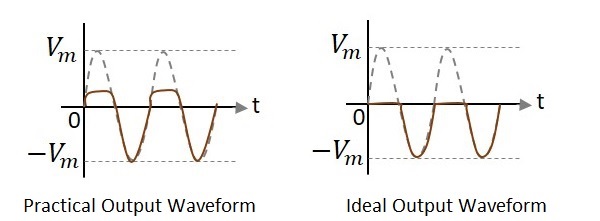
Na powyższych rysunkach, jeśli obserwuje się przebiegi, możemy zrozumieć, że tylko część dodatniego piku została obcięta. Dzieje się tak z powodu napięcia na V0. Ale idealna produkcja nie miała tak być. Spójrzmy na poniższe liczby.
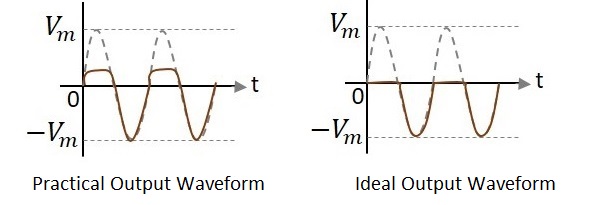
W przeciwieństwie do idealnego wyjścia, niewielka część dodatniego cyklu jest obecna w praktycznym wyjściu z powodu napięcia przewodzenia diody, które wynosi 0,7 V. Stąd będzie różnica w praktycznych i idealnych przebiegach wyjściowych.
Clipper z serii pozytywnej z pozytywem $V_{r}$
Obwód Clipper, w którym dioda jest połączona szeregowo z sygnałem wejściowym i spolaryzowana dodatnim napięciem odniesienia $V_{r}$ a to osłabia dodatnie części kształtu fali, jest określane jako Positive Series Clipper with positive $V_{r}$. Poniższy rysunek przedstawia schemat obwodu dla obcinacza szeregowego dodatniego, gdy przyłożone napięcie odniesienia jest dodatnie.
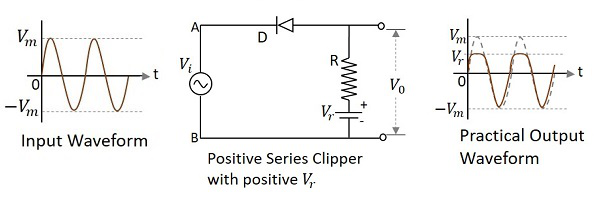
Podczas dodatniego cyklu na wejściu dioda zostaje spolaryzowana odwrotnie, a na wyjściu pojawia się napięcie odniesienia. Podczas cyklu ujemnego dioda jest spolaryzowana do przodu i zachowuje się jak zamknięty przełącznik. W związku z tym przebieg wyjściowy wygląda tak, jak pokazano na powyższym rysunku.
Clipper z serii pozytywnej z negatywem $V_{r}$
Obwód Clipper, w którym dioda jest połączona szeregowo z sygnałem wejściowym i spolaryzowana ujemnym napięciem odniesienia $V_{r}$ a to osłabia dodatnie części kształtu fali, jest określane jako Positive Series Clipper with negative $V_{r}$. Poniższy rysunek przedstawia schemat obwodu dodatniego odcinacza szeregowego, gdy przyłożone napięcie odniesienia jest ujemne.
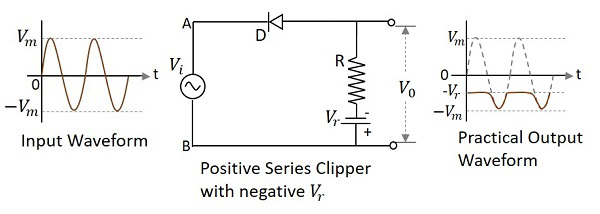
Podczas dodatniego cyklu na wejściu dioda zostaje spolaryzowana odwrotnie, a na wyjściu pojawia się napięcie odniesienia. Ponieważ napięcie odniesienia jest ujemne, wyświetlane jest to samo napięcie o stałej amplitudzie. Podczas cyklu ujemnego dioda jest spolaryzowana do przodu i zachowuje się jak zamknięty przełącznik. Stąd na wyjściu pojawia się sygnał wejściowy, który jest większy niż napięcie odniesienia.
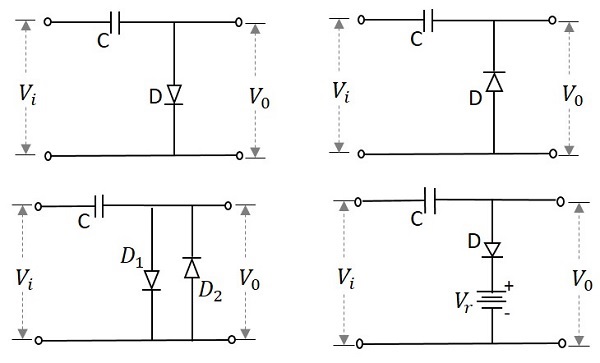
Strzyżarka z dodatnim bocznikiem
Obwód Clipper, w którym dioda jest podłączona bocznikowo do sygnału wejściowego i który tłumi dodatnie części kształtu fali, jest określany jako Positive Shunt Clipper. Poniższy rysunek przedstawia schemat obwodu dodatniego obcinacza bocznikowego.
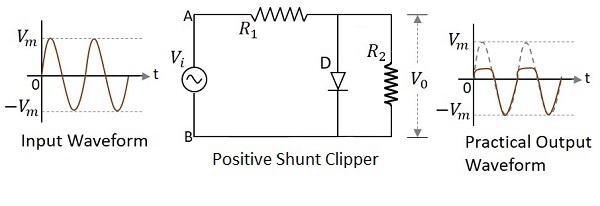
Positive Cycle of the Input- Po przyłożeniu napięcia wejściowego, dodatni cykl na wejściu powoduje, że punkt A w obwodzie jest dodatni w stosunku do punktu B. To powoduje, że dioda jest spolaryzowana do przodu, a zatem przewodzi jak zamknięty przełącznik. W ten sposób napięcie na rezystorze obciążenia spada do zera, ponieważ nie przepływa przez niego prąd, a zatem$V_{0}$ będzie wynosić zero.
Negative Cycle of the Input- Cykl ujemny na wejściu powoduje, że punkt A w obwodzie jest ujemny w stosunku do punktu B. Powoduje to odwrócenie polaryzacji diody i tym samym zachowuje się jak otwarty przełącznik. Zatem napięcie na rezystorze obciążającym będzie równe przyłożonemu napięciu wejściowemu, gdy całkowicie pojawia się na wyjściu$V_{0}$.
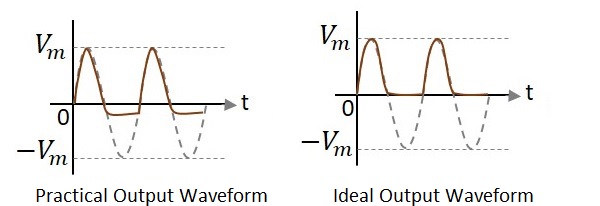
Przebiegi
Na powyższych rysunkach, jeśli obserwuje się przebiegi, możemy zrozumieć, że tylko część dodatniego piku została obcięta. Dzieje się tak z powodu napięcia w poprzek$V_{0}$. Ale idealna produkcja nie miała tak być. Spójrzmy na poniższe liczby.
W przeciwieństwie do idealnego wyjścia, niewielka część dodatniego cyklu jest obecna w praktycznym wyjściu z powodu napięcia przewodzenia diody, które wynosi 0,7 V. Stąd będzie różnica w praktycznych i idealnych przebiegach wyjściowych.
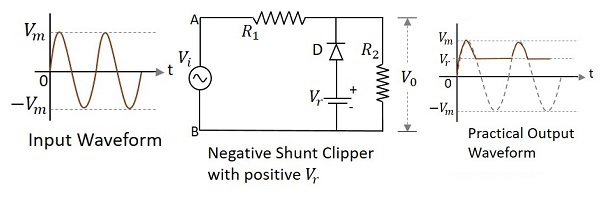
Pozytywna maszynka do strzyżenia boczków z pozytywem $V_{r}$
Obwód Clipper, w którym dioda jest połączona bocznikiem z sygnałem wejściowym i spolaryzowana dodatnim napięciem odniesienia $V_{r}$ a to osłabia dodatnie części kształtu fali, jest określane jako Positive Shunt Clipper with positive $V_{r}$. Poniższy rysunek przedstawia schemat obwodu dodatniego obcinacza bocznika, gdy przyłożone napięcie odniesienia jest dodatnie.
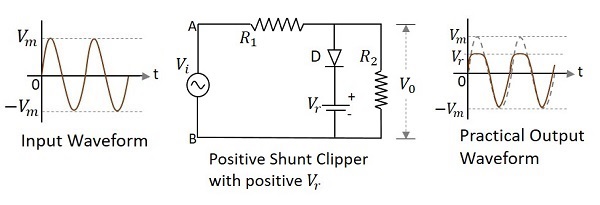
Podczas dodatniego cyklu na wejściu dioda jest spolaryzowana do przodu i na wyjściu pojawia się tylko napięcie odniesienia. Podczas cyklu ujemnego dioda zostaje spolaryzowana do tyłu i zachowuje się jak otwarty przełącznik. Na wyjściu pojawia się całość wejścia. W związku z tym przebieg wyjściowy wygląda tak, jak pokazano na powyższym rysunku.
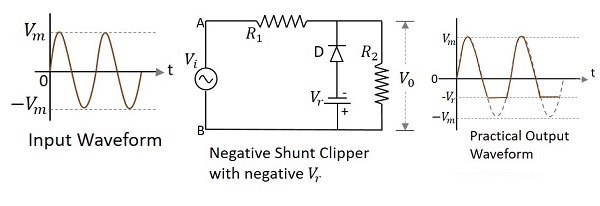
Dodatnia strzyżarka bocznikowa z negatywem $V_{r}$
Obwód Clipper, w którym dioda jest podłączona bocznikowo do sygnału wejściowego i spolaryzowana ujemnym napięciem odniesienia $V_{r}$ a to osłabia dodatnie części kształtu fali, jest określane jako Positive Shunt Clipper with negative $V_{r}$.
Poniższy rysunek przedstawia schemat obwodu dodatniego obcinacza bocznikowego, gdy przyłożone napięcie odniesienia jest ujemne.
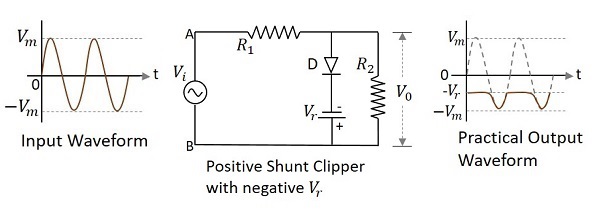
Podczas dodatniego cyklu na wejściu dioda jest spolaryzowana do przodu i na wyjściu pojawia się napięcie odniesienia. Ponieważ napięcie odniesienia jest ujemne, wyświetlane jest to samo napięcie o stałej amplitudzie. Podczas cyklu ujemnego dioda zostaje spolaryzowana do tyłu i zachowuje się jak otwarty przełącznik. Stąd na wyjściu pojawia się sygnał wejściowy, który jest większy niż napięcie odniesienia.
Obwód Clipper, który jest przeznaczony do tłumienia ujemnych części sygnału wejściowego, można określić jako Negative Clipper. Wśród obwodów obcinacza diod ujemnych mamy następujące typy.
- Maszynka do strzyżenia Negative Series
- Negative Series Clipper z pozytywem $V_{r}$ (napięcie odniesienia)
- Maszynka do strzyżenia Negative Series z negatywem $V_{r}$
- Obcinarka bocznikowa ujemna
- Ujemna strzyżarka bocznikowa z dodatnim $V_{r}$
- Strzyżarka bocznikowa ujemna z negatywem $V_{r}$
Omówmy szczegółowo każdy z tych typów.
Maszynka do strzyżenia Negative Series
Obwód Clipper, w którym dioda jest połączona szeregowo z sygnałem wejściowym i który tłumi ujemne części kształtu fali, jest określany jako Negative Series Clipper. Poniższy rysunek przedstawia schemat połączeń dla obcinacza serii ujemnej.
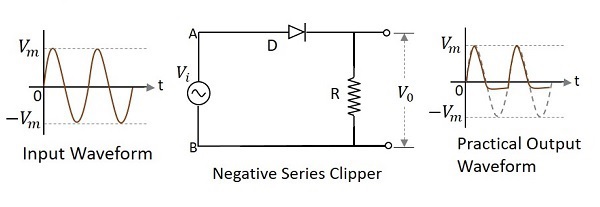
Positive Cycle of the Input- Po przyłożeniu napięcia wejściowego dodatni cykl wejściowy powoduje, że punkt A w obwodzie jest dodatni w stosunku do punktu B. To powoduje, że dioda jest spolaryzowana do przodu, a zatem działa jak zamknięty przełącznik. W ten sposób napięcie wejściowe pojawia się całkowicie na rezystorze obciążenia, aby wytworzyć wyjście$V_{0}$.
Negative Cycle of the Input- Cykl ujemny wejścia powoduje, że punkt A w obwodzie jest ujemny w stosunku do punktu B. Powoduje to odwrócenie polaryzacji diody i tym samym działa jak otwarty przełącznik. Zatem napięcie na rezystorze obciążenia będzie równe zeru$V_{0}$ zero.
Przebiegi
Na powyższych rysunkach, jeśli obserwuje się przebiegi, możemy zrozumieć, że tylko część ujemnego piku została obcięta. Dzieje się tak z powodu napięcia w poprzek$V_{0}$. Ale idealna produkcja nie miała tak być. Spójrzmy na poniższe liczby.
W przeciwieństwie do idealnego wyjścia, niewielka część ujemnego cyklu jest obecna w praktycznym wyjściu ze względu na napięcie przewodzenia diody, które wynosi 0,7 V. Stąd będzie różnica w praktycznych i idealnych przebiegach wyjściowych.
Negative Series Clipper z pozytywem $V_{r}$
Obwód Clipper, w którym dioda jest połączona szeregowo z sygnałem wejściowym i spolaryzowana dodatnim napięciem odniesienia $V_{r}$ a to osłabia ujemne części kształtu fali, jest określane jako Negative Series Clipper with positive $V_{r}$. Poniższy rysunek przedstawia schemat obwodu dla obcinacza szeregowego ujemnego, gdy przyłożone napięcie odniesienia jest dodatnie.
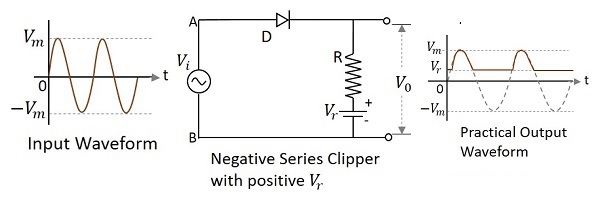
Podczas dodatniego cyklu wejścia dioda zaczyna przewodzić tylko wtedy, gdy wartość napięcia anodowego przekroczy wartość napięcia katodowego diody. Ponieważ napięcie katody jest równe przyłożonemu napięciu odniesienia, sygnał wyjściowy będzie taki, jak pokazano.
Maszynka do strzyżenia Negative Series z negatywem $V_{r}$
Obwód Clipper, w którym dioda jest połączona szeregowo z sygnałem wejściowym i spolaryzowana ujemnym napięciem odniesienia $V_{r}$ a to osłabia ujemne części kształtu fali, jest określane jako Negative Series Clipper with negative $V_{r}$. Poniższy rysunek przedstawia schemat obwodu dla obcinacza szeregowego ujemnego, gdy przyłożone napięcie odniesienia jest ujemne.
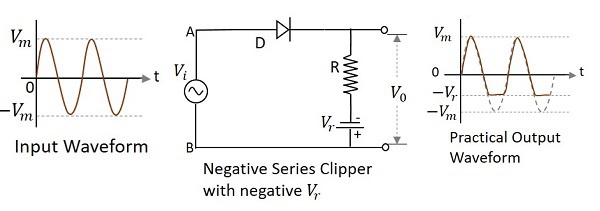
Podczas dodatniego cyklu na wejściu dioda zostaje spolaryzowana do przodu i na wyjściu pojawia się sygnał wejściowy. Podczas cyklu ujemnego dioda jest spolaryzowana odwrotnie i dlatego nie będzie przewodzić. Ale przyłożone ujemne napięcie odniesienia pojawia się na wyjściu. Stąd ujemny cykl przebiegu wyjściowego zostaje obcinany po tym poziomie odniesienia.
Obcinarka bocznikowa ujemna
Obwód Clippera, w którym dioda jest podłączona bocznikowo do sygnału wejściowego i który tłumi ujemne części kształtu fali, jest określany jako Negative Shunt Clipper. Poniższy rysunek przedstawia schemat połączeń dlanegative shunt clipper.
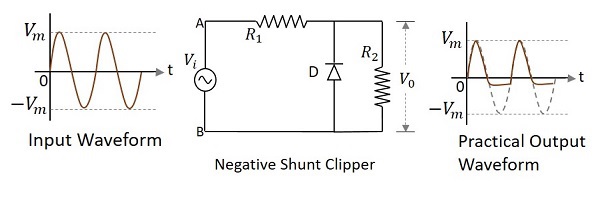
Positive Cycle of the Input- Po przyłożeniu napięcia wejściowego, dodatni cykl wejścia powoduje, że punkt A w obwodzie jest dodatni w stosunku do punktu B. To powoduje, że dioda jest spolaryzowana odwrotnie, a zatem zachowuje się jak otwarty przełącznik. Zatem napięcie na rezystorze obciążającym jest równe przyłożonemu napięciu wejściowemu, które pojawia się całkowicie na wyjściu$V_{0}$
Negative Cycle of the Input- Cykl ujemny wejścia powoduje, że punkt A w obwodzie jest ujemny w stosunku do punktu B. To powoduje, że dioda jest spolaryzowana do przodu, a tym samym przewodzi jak zamknięty przełącznik. Zatem napięcie na rezystorze obciążenia spada do zera, ponieważ nie przepływa przez niego prąd.
Przebiegi
Na powyższych rysunkach, jeśli obserwuje się przebiegi, możemy zrozumieć, że tylko część ujemnego piku została obcięta. Dzieje się tak z powodu napięcia w poprzek$V_{0}$. Ale idealna produkcja nie miała tak być. Spójrzmy na poniższe liczby.
W przeciwieństwie do idealnego wyjścia, niewielka część ujemnego cyklu jest obecna w praktycznym wyjściu ze względu na napięcie przewodzenia diody, które wynosi 0,7 V. Stąd będzie różnica w praktycznych i idealnych przebiegach wyjściowych.
Ujemna strzyżarka bocznikowa z dodatnim $V_{r}$
Obwód Clipper, w którym dioda jest połączona bocznikiem z sygnałem wejściowym i spolaryzowana dodatnim napięciem odniesienia $V_{r}$ a to osłabia ujemne części kształtu fali, jest określane jako Negative Shunt Clipper with positive $V_{r}$. Poniższy rysunek przedstawia schemat obwodu ogranicznika bocznikowego ujemnego, gdy przyłożone napięcie odniesienia jest dodatnie.
Podczas dodatniego cyklu na wejściu dioda zostaje spolaryzowana odwrotnie i zachowuje się jak otwarty przełącznik. Tak więc na wyjściu pojawia się całe napięcie wejściowe, które jest większe niż przyłożone napięcie odniesienia. Sygnał poniżej poziomu napięcia odniesienia zostaje odcięty.
Podczas ujemnego półcyklu, gdy dioda jest spolaryzowana do przodu i pętla zostaje zakończona, wyjście nie jest obecne.
Strzyżarka bocznikowa ujemna z negatywem $V_{r}$
Obwód Clipper, w którym dioda jest podłączona bocznikowo do sygnału wejściowego i spolaryzowana ujemnym napięciem odniesienia $V_{r}$ a to osłabia ujemne części kształtu fali, jest określane jako Negative Shunt Clipper with negative $V_{r}$. Poniższy rysunek przedstawia schemat obwodu ogranicznika bocznikowego ujemnego, gdy przyłożone napięcie odniesienia jest ujemne.
Podczas dodatniego cyklu na wejściu dioda zostaje spolaryzowana odwrotnie i zachowuje się jak otwarty przełącznik. Czyli całość napięcia wejściowego pojawia się na wyjściu$V_{o}$. Podczas ujemnego półcyklu dioda jest spolaryzowana do przodu. Ujemne napięcie aż do napięcia odniesienia trafia na wyjście, a pozostały sygnał zostaje odcięty.
Dwukierunkowy Clipper
Jest to strzyżarka dodatnia i ujemna z napięciem odniesienia $V_{r}$. Napięcie wejściowe jest obcinane dwukierunkowo, zarówno w dodatnich, jak i ujemnych częściach przebiegu wejściowego, z dwoma napięciami odniesienia. Do tego dwie diody$D_{1}$ i $D_{2}$ wraz z dwoma napięciami odniesienia $V_{r1}$ i $V_{r2}$ są podłączone w obwodzie.
Ten obwód jest również nazywany Combinational Clipperobwód. Poniższy rysunek przedstawia układ obwodu dwukierunkowego lub kombinacyjnego obwodu obcinacza wraz z jego przebiegiem wyjściowym.

Podczas dodatniej połowy sygnału wejściowego dioda $D_{1}$ prowadzi wytwarzanie napięcia odniesienia $V_{r1}$pojawiają się na wyjściu. W czasie ujemnej połowy sygnału wejściowego dioda$D_{2}$ prowadzi wytwarzanie napięcia odniesienia $V_{r1}$pojawiają się na wyjściu. Stąd obie diody przewodzą naprzemiennie, aby przyciąć wyjście podczas obu cykli. Wyjście jest przenoszone przez rezystor obciążenia.
Skończyliśmy z głównymi obwodami obcinacza. Przejdźmy do obwodów zaciskowych w następnym rozdziale.
Obwód zaciskowy to obwód, który dodaje poziom DC do sygnału AC. W rzeczywistości dodatnie i ujemne szczyty sygnałów można umieścić na żądanych poziomach za pomocą obwodów mocujących. Gdy poziom DC zostaje przesunięty, obwód zacisku nazywany jest jakoLevel Shifter.
Obwody zaciskowe składają się z elementów magazynujących energię, takich jak kondensatory. Prosty obwód zaciskowy składa się z kondensatora, diody, rezystora i baterii prądu stałego, jeśli jest to wymagane.
Obwód zaciskowy
Obwód Clamper można zdefiniować jako obwód składający się z diody, rezystora i kondensatora, który przesuwa kształt fali do pożądanego poziomu prądu stałego bez zmiany rzeczywistego wyglądu przyłożonego sygnału.
Aby zachować okres czasu fali, rozszerzenie tau musi być większa niż połowa okresu czasu (czas rozładowania kondensatora powinien być powolny).
$$\tau = Rc$$
Gdzie
- R jest rezystancją zastosowanego rezystora
- C to pojemność zastosowanego kondensatora
Stała czasowa ładowania i rozładowania kondensatora określa moc wyjściową obwodu zaciskowego.
W obwodzie zaciskowym następuje pionowe przesunięcie w górę lub w dół przebiegu wyjściowego w odniesieniu do sygnału wejściowego.
Rezystor obciążający i kondensator wpływają na przebieg. Tak więc czas rozładowania kondensatora powinien być wystarczająco duży.
Składowa DC obecna na wejściu jest odrzucana, gdy używana jest sieć sprzężona z kondensatorem (jako kondensator blokuje prąd stały). Stąd kiedydc musi być restored, używany jest obwód zaciskowy.
Rodzaje zacisków
Istnieje kilka typów obwodów zaciskowych, takich jak
- Pozytywny Clamper
- Zacisk pozytywny z pozytywnym $V_r$
- Zacisk pozytywny z negatywem $V_r$
- Zacisk ujemny
- Zacisk negatywny z pozytywem $V_{r}$
- Zacisk negatywowy z negatywem $V_{r}$
Omówmy je szczegółowo.
Dodatni obwód zacisku
Obwód zaciskowy przywraca poziom DC. Kiedy ujemny szczyt sygnału jest podniesiony powyżej poziomu zerowego, mówi się, że sygnał jestpositively clamped.
Obwód z zaciskiem dodatnim to taki, który składa się z diody, rezystora i kondensatora i przesuwa sygnał wyjściowy do dodatniej części sygnału wejściowego. Poniższy rysunek wyjaśnia budowę dodatniego obwodu zaciskowego.
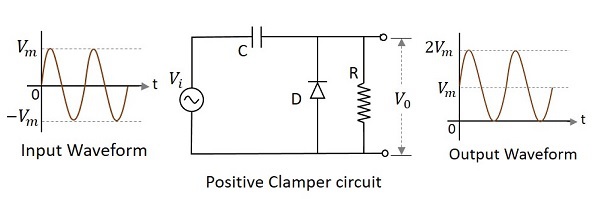
Początkowo, gdy podane jest dane wejściowe, kondensator nie jest jeszcze naładowany, a dioda jest spolaryzowana odwrotnie. Wyjście nie jest brane pod uwagę w tym momencie. Podczas ujemnego półcyklu, przy wartości szczytowej, kondensator jest ładowany ujemnym na jednej płycie i dodatnim na drugiej. Kondensator jest teraz ładowany do wartości szczytowej$V_{m}$. Dioda jest spolaryzowana do przodu i silnie przewodzi.
Podczas następnego dodatniego półcyklu kondensator jest ładowany do dodatniego Vm, podczas gdy dioda jest spolaryzowana wstecz i otwiera się. Wyjście obwodu w tym momencie będzie
$$V_{0}=V_{i}+V_{m}$$
W związku z tym sygnał jest stabilizowany dodatnio, jak pokazano na powyższym rysunku. Sygnał wyjściowy zmienia się zgodnie ze zmianami na wejściu, ale przesuwa poziom zgodnie z ładunkiem na kondensatorze, ponieważ dodaje napięcie wejściowe.
Zacisk dodatni z dodatnim V r
Dodatni obwód zaciskowy, jeśli jest polaryzowany dodatnim napięciem odniesienia, to napięcie zostanie dodane do wyjścia, aby podnieść poziom zacisku. Wykorzystując to, obwód zacisku dodatniego z dodatnim napięciem odniesienia jest zbudowany jak poniżej.
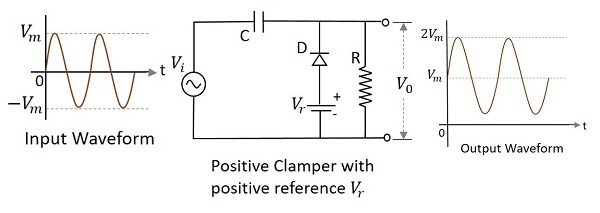
Podczas dodatniego półokresu napięcie odniesienia jest przykładane przez diodę na wyjściu, a wraz ze wzrostem napięcia wejściowego napięcie katodowe diody rośnie w stosunku do napięcia anodowego, a zatem przestaje przewodzić. Podczas ujemnego półcyklu dioda zostaje przesunięta do przodu i zaczyna przewodzić. Napięcie na kondensatorze i napięcie odniesienia razem utrzymują poziom napięcia wyjściowego.
Pozytywny zacisk z negatywem $V_{r}$
Dodatni obwód zaciskowy, jeśli jest spolaryzowany jakimś ujemnym napięciem odniesienia, to napięcie zostanie dodane do wyjścia w celu podniesienia poziomu zacisku. Wykorzystując to, obwód zacisku dodatniego z dodatnim napięciem odniesienia jest zbudowany jak poniżej.
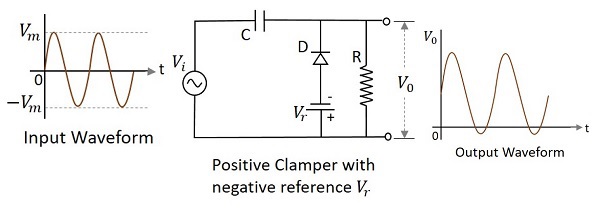
Podczas dodatniego półokresu napięcie na kondensatorze i napięcie odniesienia razem utrzymują poziom napięcia wyjściowego. Podczas ujemnego półokresu dioda przewodzi, gdy napięcie katody spada poniżej napięcia anodowego. Te zmiany powodują, że napięcie wyjściowe jest pokazane na powyższym rysunku.
Zacisk ujemny
Obwód z zaciskiem ujemnym to taki, który składa się z diody, rezystora i kondensatora i przesuwa sygnał wyjściowy do ujemnej części sygnału wejściowego. Poniższy rysunek wyjaśnia budowę ujemnego obwodu zaciskowego.
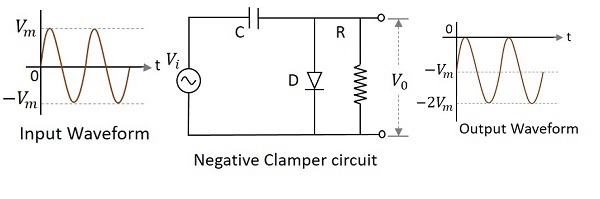
Podczas dodatniego półcyklu kondensator jest ładowany do wartości szczytowej $v_{m}$. Dioda jest spolaryzowana do przodu i przewodzi. Podczas ujemnego półcyklu dioda zostaje spolaryzowana odwrotnie i zostaje otwarta w obwodzie. Wyjście obwodu w tym momencie będzie
$$V_{0}=V_{i}+V_{m}$$
W związku z tym sygnał jest stabilizowany ujemnie, jak pokazano na powyższym rysunku. Sygnał wyjściowy zmienia się zgodnie ze zmianami na wejściu, ale przesuwa poziom zgodnie z ładunkiem na kondensatorze, ponieważ dodaje napięcie wejściowe.
Zacisk ujemny z dodatnim V r
Ujemny obwód zaciskowy, jeśli jest obciążony dodatnim napięciem odniesienia, to napięcie zostanie dodane do wyjścia w celu podniesienia poziomu zacisku. Wykorzystując to, obwód zacisku ujemnego z dodatnim napięciem odniesienia jest zbudowany jak poniżej.
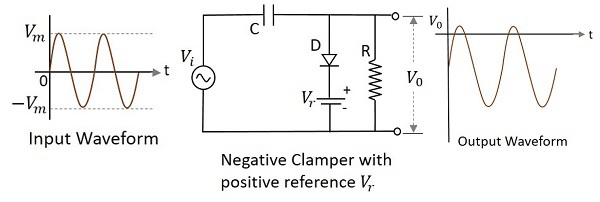
Chociaż napięcie wyjściowe jest ujemne, część przebiegu wyjściowego jest podnoszona do poziomu dodatniego, ponieważ przyłożone napięcie odniesienia jest dodatnie. Podczas dodatniego półokresu dioda przewodzi, ale wyjście jest równe przyłożonemu dodatniemu napięciu odniesienia. Podczas ujemnego półcyklu dioda działa jak otwarty obwód, a napięcie na kondensatorze tworzy wyjście.
Zacisk ujemny z ujemnym V r
Ujemny obwód zaciskowy, jeśli jest spolaryzowany jakimś ujemnym napięciem odniesienia, to napięcie zostanie dodane do wyjścia w celu podniesienia poziomu zacisku. Wykorzystując to, obwód zacisku ujemnego z ujemnym napięciem odniesienia jest zbudowany jak poniżej.
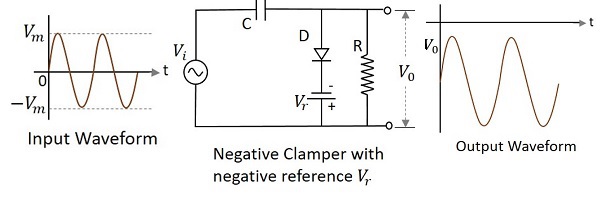
Katoda diody jest połączona z ujemnym napięciem odniesienia, które jest mniejsze od zera, i napięciem anodowym. Stąd dioda zaczyna przewodzić podczas dodatniego półcyklu, przed zerowym poziomem napięcia. Podczas ujemnego półcyklu na wyjściu pojawia się napięcie na kondensatorze. W ten sposób przebieg jest zaciskany w kierunku części ujemnej.
Aplikacje
Istnieje wiele zastosowań zarówno dla Clippers, jak i Clampers, takich jak
Nożyce
- Służy do generowania i kształtowania przebiegów
- Służy do ochrony obwodów przed skokami
- Używany do przywracania amplitudy
- Używane jako ograniczniki napięcia
- Używany w obwodach telewizyjnych
- Stosowany w nadajnikach FM
Zaciski
- Używany jako regeneratory prądu stałego
- Służy do usuwania zniekształceń
- Używane jako mnożniki napięcia
- Służy do ochrony wzmacniaczy
- Używany jako sprzęt testowy
- Używany jako stabilizator linii bazowej
Wraz z układami kształtującymi fale, takimi jak obcinacze i cęgi, diody służą do konstruowania innych obwodów, takich jak ograniczniki i powielacze napięcia, które omówimy w tym rozdziale. Diody mają również inne ważne zastosowanie znane jako prostowniki, które zostaną omówione później.
Ograniczniki
Inną nazwą, z którą często spotykamy się podczas przeglądania tych cążek i zacisków, jest obwód ogranicznika. ZAlimiter Obwód można rozumieć jako taki, który ogranicza napięcie wyjściowe od przekroczenia określonej wartości.
Jest to mniej więcej obwód obcinacza, który nie pozwala na przekroczenie określonej wartości sygnału. W rzeczywistości obcinanie można nazwać skrajnym ograniczeniem. Dlatego ograniczenie można rozumieć jako płynne obcinanie.
Poniższy obraz przedstawia kilka przykładów obwodów ogranicznika -
Działanie obwodu ogranicznika można zrozumieć na podstawie jego charakterystyki przenoszenia. Przykład takiej krzywej jest następujący.
Dolną i górną granicę określa wykres, który wskazuje charakterystykę ogranicznika. Napięcie wyjściowe dla takiego wykresu można rozumieć jako
$$V_{0}= L_{-},KV_{i},L_{+}$$
Gdzie
$$L_{-}=V_{i}\leq \frac{L_{-}}{k}$$
$$ KV_ {i} = \ frac {L _ {-}} {k} <V_ {i} <\ frac {L _ {+}} {k} $$
$$L_{+}=V_{i}\geq \frac{L_{+}}{K}$$
Rodzaje ograniczników
Istnieje kilka typów ograniczników, takich jak
Unipolar Limiter - Ten obwód ogranicza sygnał w jeden sposób.
Bipolar Limiter - Ten obwód ogranicza sygnał w dwojaki sposób.
Soft Limiter - Wyjście może się zmienić w tym obwodzie nawet przy niewielkiej zmianie na wejściu.
Hard Limiter - Wyjście nie będzie łatwo zmieniać się wraz ze zmianą sygnału wejściowego.
Single Limiter - Ten obwód wykorzystuje jedną diodę do ograniczania.
Double Limiter - Ten obwód wykorzystuje dwie diody ograniczające.
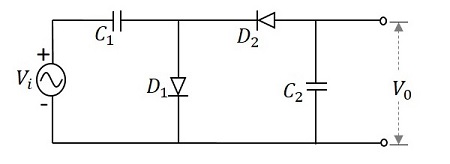
Mnożniki napięcia
Istnieją aplikacje, w których w niektórych przypadkach konieczne jest zwielokrotnienie napięcia. Można to łatwo zrobić za pomocą prostego obwodu z diodami i kondensatorami. Podwojenie napięcia powoduje, że obwód taki nazywany jest podwajaczem napięcia. Można to rozszerzyć, aby utworzyć potrójnik napięcia lub czteroręcznik napięcia lub tak dalej, aby uzyskać wysokie napięcia DC.
Aby lepiej zrozumieć, rozważmy obwód, który mnoży napięcie przez współczynnik 2. Obwód ten można nazwać Voltage Doubler. Poniższy rysunek przedstawia obwód podwajacza napięcia.
Przyłożone napięcie wejściowe będzie sygnałem AC, który ma postać fali sinusoidalnej, jak pokazano na poniższym rysunku.
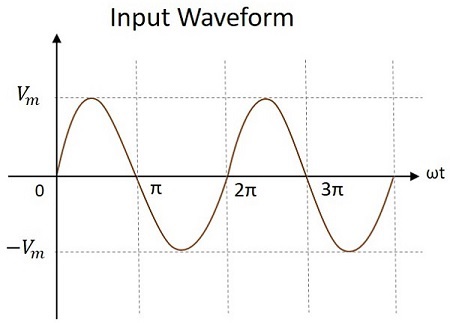
Pracujący
Obwód powielacza napięcia można zrozumieć analizując każde półcyklu sygnału wejściowego. Każdy cykl powoduje, że diody i kondensatory działają w inny sposób. Spróbujmy to zrozumieć.
During the first positive half cycle - Po przyłożeniu sygnału wejściowego kondensator $C_{1}$ jest naładowany i dioda $D_{1}$jest skierowany do przodu. Podczas gdy dioda$D_{2}$ jest spolaryzowane odwrotnie i kondensator $C_{2}$nie pobiera żadnych opłat. To sprawia, że wyjście$V_{0}$ być $V_{m}$
Można to zrozumieć na poniższym rysunku.
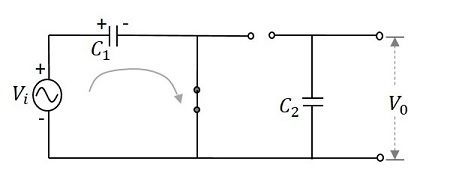
Stąd podczas 0 do $\pi$, wytworzone napięcie wyjściowe będzie $V_{max}$. Kondensator$C_{1}$ jest ładowany przez diodę polaryzowaną do przodu $D_{1}$ aby dać wynik, podczas gdy $C_{2}$nie ładuje się. To napięcie pojawia się na wyjściu.
During the negative half cycle - Po tym, gdy nadejdzie ujemny półcykl, dioda $D_{1}$ dostaje odwrotną polaryzację i dioda $D_{2}$staje się stronniczy. Dioda$D_{2}$ pobiera ładunek przez kondensator $C_{2}$która jest naliczana podczas tego procesu. Prąd przepływa następnie przez kondensator$C_{1}$który wyładowuje. Można to zrozumieć na poniższym rysunku.
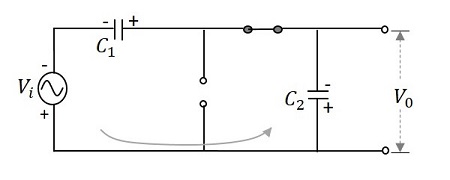
Stąd w trakcie $\pi$ do $2\pi$, napięcie na kondensatorze $C_{2}$ będzie $V_{max}$. Podczas gdy kondensator$C_{1}$który jest w pełni naładowany, ma tendencję do rozładowywania się. Teraz napięcia z obu kondensatorów razem pojawiają się na wyjściu, czyli$2V_{max}$. Więc napięcie wyjściowe$V_{0}$ podczas tego cyklu jest $2V_{max}$
During the next positive half cycle - Kondensator $C_{1}$ ładuje się z zasilacza i diody $D_{1}$staje się stronniczy. Kondensator$C_{2}$ utrzymuje ładunek, ponieważ nie znajdzie sposobu na rozładowanie i diodę $D_{2}$zostaje odwrócony. Teraz napięcie wyjściowe$V_{0}$ tego cyklu pobiera napięcia z obu kondensatorów, które razem pojawiają się na wyjściu, czyli $2V_{max}$.
During the next negative half cycle - Następna ujemna połowa cyklu tworzy kondensator $C_{1}$ aby ponownie rozładować się z pełnego naładowania i diody $D_{1}$ odwrócić stronniczość podczas $D_{2}$ do przodu i kondensator $C_{2}$ładować dalej, aby utrzymać swoje napięcie. Teraz napięcie wyjściowe$V_{0}$ tego cyklu pobiera napięcia z obu kondensatorów, które razem pojawiają się na wyjściu, czyli $2V_{max}$.
Stąd napięcie wyjściowe $V_{0}$ jest utrzymywany $2V_{max}$ podczas całej swojej pracy, co sprawia, że obwód podwaja napięcie.
Powielacze napięcia są najczęściej używane tam, gdzie wymagane są wysokie napięcia DC. Na przykład lampy elektronopromieniowe i monitor komputerowy.
Dzielnik napięcia
Podczas gdy diody są używane do zwielokrotnienia napięcia, zestaw rezystorów szeregowych można przekształcić w małą sieć, aby podzielić napięcie. Takie sieci nazywane są jakoVoltage Divider sieci.
Dzielnik napięcia to obwód, który zamienia większe napięcie na mniejsze. Odbywa się to za pomocą rezystorów połączonych szeregowo. Wynik będzie ułamkiem wkładu. Napięcie wyjściowe zależy od rezystancji obciążenia, które napędza.
Spróbujmy dowiedzieć się, jak działa obwód dzielnika napięcia. Poniższy rysunek jest przykładem prostej sieci dzielnika napięcia.
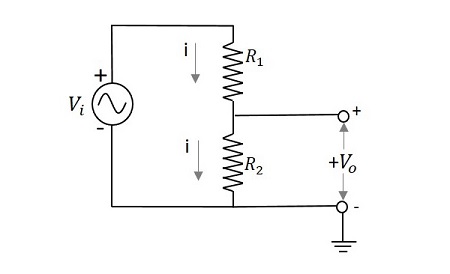
Jeśli spróbujemy narysować wyrażenie na napięcie wyjściowe,
$$V_{i}=i\left ( R_{1}+R_{2} \right )$$
$$i=\frac{V-{i}}{\left ( R_{1}+R_{2} \right )}$$
$$V_{0}=i \:R_{2}\rightarrow \:i\:=\frac{V_{0}}{R_{2}}$$
Porównując oba,
$$\frac{V_{0}}{R_{2}}=\frac{V_{i}}{\left ( R_1 + R_{2} \right )}$$
$$V_{0}=\frac{V_{i}}{\left ( R_1 + R_{2} \right )}R_{2}$$
To jest wyrażenie pozwalające uzyskać wartość napięcia wyjściowego. Stąd napięcie wyjściowe jest dzielone w zależności od wartości rezystancji rezystorów w sieci. Dodano więcej rezystorów, aby uzyskać różne ułamki różnych napięć wyjściowych.
Przyjrzyjmy się przykładowemu problemowi, aby lepiej zrozumieć dzielniki napięcia.
Przykład
Obliczyć napięcie wyjściowe sieci o napięciu wejściowym 10 V z dwoma rezystorami szeregowymi 2 kΩ i 5 kΩ.
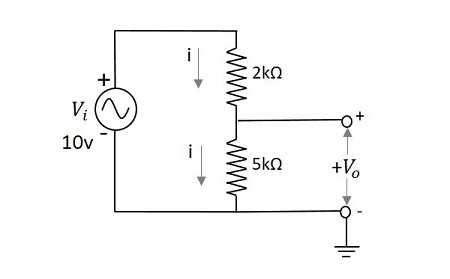
Napięcie wyjściowe $V_{0}$ jest dany przez
$$V_{0}=\frac{V_{i}}{\left ( R_1 + R_{2} \right )}R_{2}$$
$$=\frac{10}{\left ( 2 + 5 \right )k\Omega }5k\Omega$$
$$=\frac{10}{7}\times 5=\frac{50}{7}$$
$$=7.142v$$
Napięcie wyjściowe $V_0$ dla powyższego problemu jest 7.14v
Dioda to dwuzaciskowe złącze PN, które może być używane w różnych aplikacjach. Jedną z takich aplikacji jest przełącznik elektryczny. Złącze PN, gdy spolaryzowane do przodu, działa jako zwarte, a gdy spolaryzowane do tyłu, działa jak otwarte. Stąd zmiana stanów spolaryzowanych do przodu i do tyłu powoduje, że dioda działa jako przełącznikforward istota ON i reverse istota OFF stan.

Przełączniki elektryczne zamiast przełączników mechanicznych
Przełączniki elektryczne są preferowanym wyborem w stosunku do przełączników mechanicznych z następujących powodów -
- Przełączniki mechaniczne są podatne na utlenianie metali, podczas gdy przełączniki elektryczne nie.
- Przełączniki mechaniczne mają ruchome styki.
- Są bardziej podatne na stres i odkształcenia niż przełączniki elektryczne.
- Zużyte i rozdarte przełączniki mechaniczne często wpływają na ich działanie.
Dlatego przełącznik elektryczny jest bardziej przydatny niż przełącznik mechaniczny.
Działanie diody jako przełącznika
Po przekroczeniu określonego napięcia rezystancja diody wzrasta, powodując odwrócenie polaryzacji diody i działa jak otwarty przełącznik. Ilekroć przyłożone napięcie jest poniżej napięcia odniesienia, rezystancja diody zmniejsza się, powodując, że dioda jest spolaryzowana do przodu i działa jak zamknięty przełącznik.
Poniższy obwód wyjaśnia działanie diody jako przełącznika.
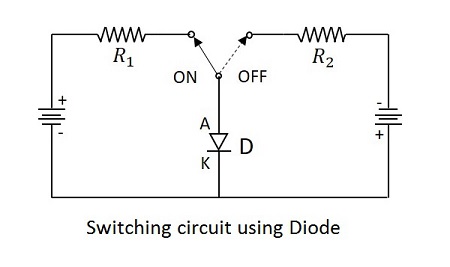
Dioda przełączająca ma złącze PN, w którym obszar P jest lekko domieszkowany, a obszar N jest mocno domieszkowany. Powyższy obwód symbolizuje, że dioda włącza się, gdy dodatnie napięcie polaryzuje diodę i wyłącza się, gdy ujemne napięcie polaryzuje diodę.
Dzwonienie
Gdy prąd przewodzenia płynie do tego momentu, z nagłym napięciem wstecznym, prąd wsteczny płynie na przykład zamiast natychmiastowego wyłączania. Im wyższy prąd upływu, tym większa strata. Przepływ prądu wstecznego, gdy dioda jest nagle spolaryzowana wstecz, może czasami powodować kilka oscylacji, zwanych asRINGING.
Ten stan dzwonienia jest stratą i dlatego należy go zminimalizować. Aby to zrobić, należy zrozumieć czasy przełączania diody.
Czasy przełączania diod
Zmieniając warunki polaryzacji dioda przechodzi a transient response. Reakcja układu na jakąkolwiek nagłą zmianę z położenia równowagi nazywana jest reakcją przejściową.
Nagła zmiana z jazdy do przodu na wsteczny iz odwrotnej do przodu wpływa na obwód. Czas potrzebny na reakcję na takie nagłe zmiany jest ważnym kryterium określającym skuteczność przełącznika elektrycznego.
Czas potrzebny do powrotu diody do stanu ustalonego nazywa się Recovery Time.
Przedział czasu potrzebny diodzie do przełączenia ze stanu spolaryzowanego do tyłu do stanu polaryzacji do przodu jest nazywany jako Forward Recovery Time.($t_{fr}$)
Przedział czasu potrzebny diodzie do przełączenia ze stanu spolaryzowanego do przodu do stanu spolaryzowanego do tyłu jest nazywany jako Reverse Recovery Time. ($t_{fr}$)
Aby lepiej to zrozumieć, spróbujmy przeanalizować, co się dzieje po przyłożeniu napięcia do przełączającej diody PN.
Koncentracja przewoźników
Stężenie nośników ładunku mniejszościowego zmniejsza się wykładniczo, patrząc z dala od złącza. Po przyłożeniu napięcia, ze względu na stan polaryzacji naprzód, większość nośników jednej strony przesuwa się w kierunku drugiej. Stają się mniejszościowymi nosicielami drugiej strony. Ta koncentracja będzie bardziej na skrzyżowaniu.
Na przykład, jeśli rozważa się typ N, nadmiar otworów, które wchodzą w typ N po zastosowaniu odchylenia w przód, dodaje się do już obecnych mniejszościowych nośników materiału typu N.
Rozważmy kilka zapisów.
- Większość nośników typu P (otwory) = $P_{po}$
- Większość nośników typu N (elektrony) = $N_{no}$
- Nośniki mniejszościowe typu P (elektrony) = $N_{po}$
- Większość nośników typu N (otwory) = $P_{no}$
During Forward biased Condition- Przewoźnicy mniejszościowi są bliżej skrzyżowania i mniej daleko od skrzyżowania. Poniższy wykres wyjaśnia to.
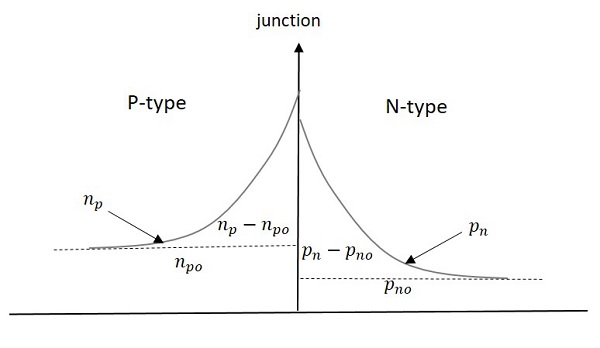
Nadwyżka opłaty przewoźnika mniejszościowego w typie P = $P_n-P_{no}$ z $p_{no}$ (wartość w stanie ustalonym)
Nadwyżka opłaty przewoźnika mniejszościowego w typie N = $N_p-N_{po}$ z $N_{po}$ (wartość w stanie ustalonym)
During reverse bias condition- Większość przewoźników nie przewodzi prądu przez skrzyżowanie i dlatego nie uczestniczy w obecnym stanie. Dioda przełączająca zachowuje się jak zwarcie, na przykład w odwrotnym kierunku.
Przewoźnicy mniejszościowi przekroczą skrzyżowanie i przewodzą prąd zwany as Reverse Saturation Current. Poniższy wykres przedstawia stan podczas odwrotnego odchylenia.

Na powyższym rysunku linia przerywana przedstawia wartości równowagi, a linie ciągłe przedstawiają wartości rzeczywiste. Ponieważ prąd pochodzący od nośników ładunku mniejszościowego jest wystarczająco duży, aby przewodzić, obwód będzie WŁĄCZONY do momentu usunięcia tego nadmiaru ładunku.
Wywoływany jest czas potrzebny diodzie do zmiany z polaryzacji w przód na wsteczne Reverse recovery time ($t_{rr}$). Poniższe wykresy szczegółowo wyjaśniają czasy przełączania diod.
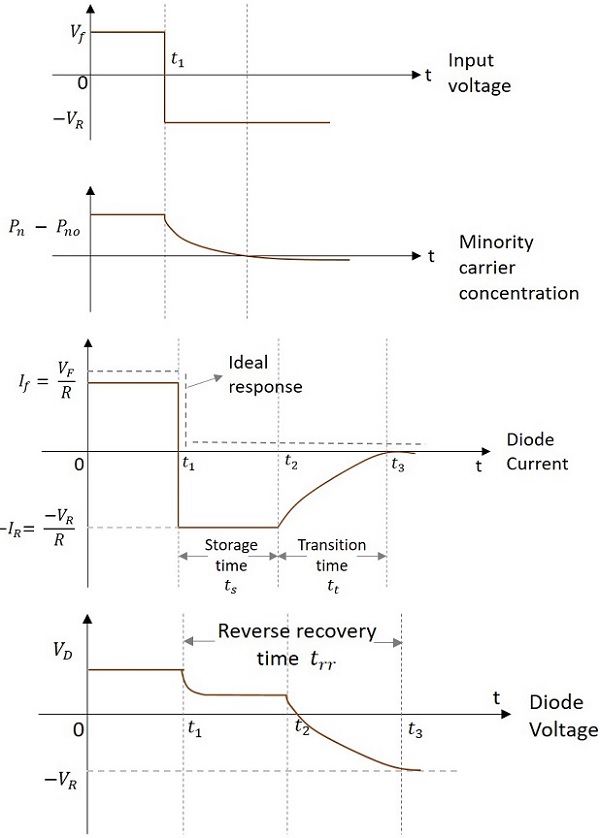
Z powyższego rysunku rozważmy wykres prądu diody.
W $t_{1}$dioda nagle przechodzi do stanu OFF ze stanu ON; jest znany jako czas przechowywania.Storage timeto czas potrzebny do usunięcia nadmiernej opłaty przewoźnika mniejszościowego. Ujemny prąd płynący z materiału typu N do P ma znaczną wielkość w czasie przechowywania. Ten ujemny prąd jest
$$-I_R= \frac{-V_{R}}{R}$$
Następnym okresem jest transition time" (od $t_2$ do $t_3$)
Czas przejścia to czas, w którym dioda całkowicie przechodzi w stan obwodu otwartego. Po$t_3$dioda będzie w stanie ustalonym z odwróconą polaryzacją. Przed$t_1$ dioda jest w stanie ustalonego polaryzacji do przodu.
Zatem czas potrzebny do całkowitego przejścia do stanu otwartego obwodu wynosi
$$Reverse \:\:recovery\:\: time\left ( t_{rr} \right )= Storage \:\:time \left ( T_{s} \right )+Transition \:\: time \left ( T_{t} \right )$$
Natomiast przejście do stanu ON z OFF zajmuje mniej czasu, o nazwie as Forward recovery time. Czas przywracania do tyłu jest dłuższy niż czas odzyskiwania do przodu. Dioda działa jako lepszy przełącznik, jeśli ten czas powrotu do tyłu jest krótszy.
Definicje
Przejdźmy tylko przez definicje omawianych okresów.
Storage time - Okres, przez który dioda pozostaje w stanie przewodzenia, nawet w stanie spolaryzowanym odwrotnym, nazywany jest ciągiem Storage time.
Transition time - Czas, jaki upłynął w powrocie do stanu nieprzewodzenia, czyli odwrotnego odchylenia w stanie ustalonym, nazywany jest Transition time.
Reverse recovery time - Czas potrzebny diodzie do zmiany z polaryzacji w przód na wsteczny jest nazywany jako Reverse recovery time.
Forward recovery time - Czas wymagany do zmiany diody z odchylenia wstecznego do przodu nazywany jest jako Forward recovery time.
Czynniki wpływające na czasy przełączania diod
Jest kilka czynników, które wpływają na czasy przełączania diody, np
Diode Capacitance - Pojemność złącza PN zmienia się w zależności od warunków polaryzacji.
Diode Resistance - Opór oferowany przez diodę do zmiany jej stanu.
Doping Concentration - Poziom domieszkowania diody wpływa na czasy przełączania diody.
Depletion Width- Im węższa szerokość warstwy zubożenia, tym szybsze przełączanie. Dioda Zenera ma wąski obszar zubożenia niż dioda lawinowa, co czyni ją lepszym przełącznikiem.
Aplikacje
Istnieje wiele zastosowań, w których stosowane są obwody przełączające diody, takie jak:
- Obwody prostownicze o dużej szybkości
- Szybkie obwody przełączające
- Odbiorniki RF
- Zastosowania ogólnego przeznaczenia
- Aplikacje konsumenckie
- Aplikacje motoryzacyjne
- Aplikacje telekomunikacyjne itp.
Ten rozdział stanowi nowy początek dotyczący innej sekcji obwodów diodowych. Daje to wprowadzenie do obwodów zasilania, z którymi spotykamy się w naszym codziennym życiu. Każde urządzenie elektroniczne składa się z jednostki zasilającej, która dostarcza wymaganą ilość zasilania AC lub DC do różnych sekcji tego urządzenia elektronicznego.
Potrzeba zasilaczy
W urządzeniach elektronicznych, takich jak komputer, telewizor, oscyloskop katodowy itp. Występuje wiele małych sekcji, ale wszystkie te sekcje nie wymagają zasilania 230V AC, które otrzymujemy.
Zamiast tego jedna lub więcej sekcji może potrzebować 12 V DC, podczas gdy inne mogą potrzebować 30 V DC. Aby zapewnić wymagane napięcie DC, wchodzące zasilanie 230 V AC musi zostać zamienione na czysty DC do użytku. PlikPower supply units służą temu samemu celowi.
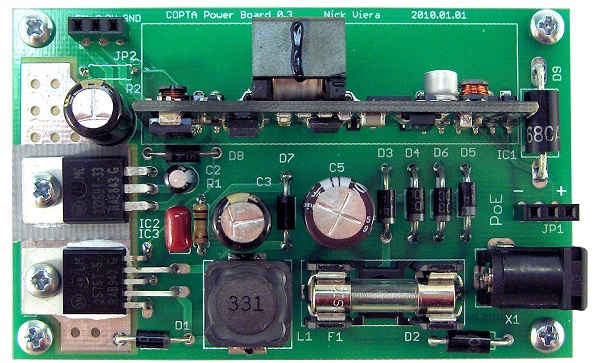
Praktyczny zasilacz wygląda jak na poniższym rysunku.
Przejdźmy teraz przez różne części, które składają się na zasilacz.
Części zasilacza
Typowy zasilacz składa się z następujących elementów.
Transformer - Transformator wejściowy do obniżania napięcia zasilania 230 V AC.
Rectifier - Obwód prostownika służący do konwersji składników prądu przemiennego obecnych w sygnale na składowe prądu stałego.
Smoothing - Obwód filtrujący do wyrównywania zmian występujących na wyprostowanym wyjściu.
Regulator - Obwód regulatora napięcia w celu regulacji napięcia do pożądanego poziomu wyjściowego.
Load - Obciążenie wykorzystujące czyste wyjście DC z wyjścia regulowanego.
Schemat blokowy zasilacza
Schemat blokowy zasilacza regulowanego przedstawiono poniżej.
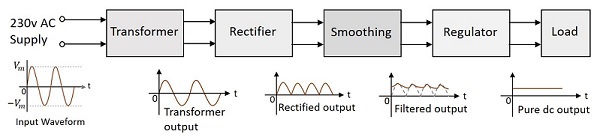
Z powyższego schematu widać, że transformator jest obecny na początkowym etapie. Chociaż omawialiśmy już koncepcję transformatorów w tutorialu BASIC ELECTRONICS, rzućmy okiem na to.
Transformator
Transformator ma primary coil do którego input jest podane i secondary coil z którego outputjest zbierany. Obie te cewki są nawinięte na rdzeń. Zwykle izolator tworzyCore transformatora.
Poniższy rysunek przedstawia praktyczny transformator.
Z powyższego rysunku jasno wynika, że kilka notacji jest wspólnych. Są następujące -
$N_{p}$ = Liczba zwojów w uzwojeniu pierwotnym
$N_{s}$ = Liczba zwojów uzwojenia wtórnego
$I_{p}$ = Prąd płynący w uzwojeniu pierwotnym transformatora
$I_{s}$ = Prąd płynący w uzwojeniu wtórnym transformatora
$V_{p}$ = Napięcie na uzwojeniu pierwotnym transformatora
$V_{s}$ = Napięcie na uzwojeniu wtórnym transformatora
$\phi$ = Strumień magnetyczny obecny wokół rdzenia transformatora
Transformator w obwodzie
Poniższy rysunek pokazuje, jak transformator jest reprezentowany w obwodzie. Uzwojenie pierwotne, uzwojenie wtórne i rdzeń transformatora są również przedstawione na poniższym rysunku.
W związku z tym, gdy transformator jest podłączony do obwodu, zasilanie wejściowe jest podawane do cewki pierwotnej, tak że wytwarza zmienny strumień magnetyczny z tym zasilaczem i ten strumień jest indukowany do uzwojenia wtórnego transformatora, co wytwarza zmienne pole elektromagnetyczne zmienny strumień. Ponieważ strumień powinien się zmieniać, w celu przeniesienia pola elektromagnetycznego z pierwotnego do wtórnego transformator zawsze działa na prąd przemienny AC.
W zależności od liczby zwojów uzwojenia wtórnego transformator można sklasyfikować jako Step-up lub a Step-down transformator.
Transformator podwyższający
Gdy uzwojenie wtórne ma więcej zwojów niż uzwojenie pierwotne, wówczas mówi się, że transformator jest a Step-uptransformator. Tutaj indukowana EMF jest większa niż sygnał wejściowy.
Poniższy rysunek przedstawia symbol transformatora podwyższającego.
Transformator obniżający napięcie
Gdy uzwojenie wtórne ma mniejszą liczbę zwojów niż uzwojenie pierwotne, wówczas mówi się, że transformator jest a Step-downtransformator. Tutaj indukowana EMF jest mniejsza niż sygnał wejściowy.
Poniższy rysunek przedstawia symbol transformatora obniżającego napięcie.
W naszych obwodach zasilania używamy Step-down transformer, ponieważ musimy zmniejszyć moc prądu przemiennego do prądu stałego. Moc wyjściowa tego transformatora obniżającego będzie mniejsza i będzie to dane wejściowe do następnej sekcji, zwanejrectifier. Omówimy prostowniki w następnym rozdziale.
Zawsze, gdy zachodzi potrzeba konwersji prądu zmiennego na prąd stały, na ratunek przychodzi obwód prostownika. Prosta dioda złączowa PN działa jako prostownik. Warunki polaryzacji do przodu i do tyłu diody powodują prostowanie.
Sprostowanie
Prąd przemienny ma właściwość ciągłej zmiany swojego stanu. Można to zrozumieć, obserwując falę sinusoidalną, przez którą wskazywany jest prąd przemienny. Podnosi się w swoim dodatnim kierunku, przechodzi do szczytowej wartości dodatniej, stamtąd zmniejsza się do normalnej i ponownie przechodzi do części ujemnej i osiąga ujemny szczyt i ponownie wraca do normy i kontynuuje.
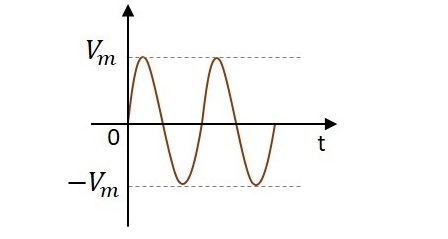
Podczas swojej podróży w formowaniu się fali, możemy zaobserwować, że fala biegnie w kierunku dodatnim i ujemnym. W rzeczywistości zmienia się całkowicie i stąd nazwa prąd przemienny.
Ale podczas procesu prostowania ten prąd przemienny jest zamieniany na prąd stały DC. Fala, która do tej pory płynie zarówno w kierunku dodatnim, jak i ujemnym, po konwersji na prąd stały będzie miała swój kierunek ograniczony tylko do kierunku dodatniego. W związku z tym prąd może płynąć tylko w kierunku dodatnim i opiera się w kierunku ujemnym, tak jak na poniższym rysunku.

Obwód, który wykonuje prostowanie, nazywany jest a Rectifier circuit. Dioda służy jako prostownik do budowy obwodu prostownika.
Rodzaje obwodów prostownika
Istnieją dwa główne typy obwodów prostownika, w zależności od ich mocy wyjściowej. Oni są
- Prostownik półfalowy
- Prostownik pełnookresowy
Obwód prostownika półokresowego prostuje tylko dodatnie półcykle zasilania wejściowego, podczas gdy obwód prostownika pełnookresowego prostuje zarówno dodatnie, jak i ujemne półcykle zasilania wejściowego.
Prostownik półfalowy
Sama nazwa prostownika półfalowego stwierdza, że rectification jest zrobione tylko dla halfcyklu. Sygnał AC jest podawany przez transformator wejściowy, który zwiększa lub zmniejsza się w zależności od zastosowania. W obwodach prostowników stosowany jest przeważnie transformator obniżający napięcie, aby zmniejszyć napięcie wejściowe.
Sygnał wejściowy podawany do transformatora przechodzi przez diodę złączową PN, która działa jak prostownik. Ta dioda przekształca napięcie przemienne w pulsujący prąd stały tylko dla dodatnich półcykli na wejściu. Rezystor obciążający jest podłączony na końcu obwodu. Poniższy rysunek przedstawia obwód prostownika półokresowego.
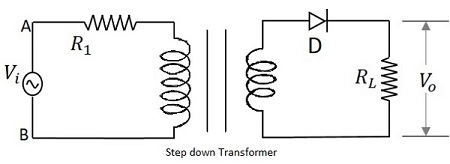
Działanie HWR
T Sygnał wejściowy podawany jest do transformatora, co zmniejsza poziomy napięcia. Sygnał wyjściowy z transformatora podawany jest na diodę, która pełni rolę prostownika. Ta dioda zapala się (przewodzi) dla dodatnich półcykli sygnału wejściowego. Stąd w obwodzie płynie prąd i nastąpi spadek napięcia na rezystorze obciążenia. Dioda wyłącza się (nie przewodzi) dla ujemnych półcyklów, a zatem wyjście dla ujemnych półcyklów będzie:$i_{D} = 0$ i $V_{o}=0$.
Stąd wyjście jest obecne tylko dla dodatnich półcyklów napięcia wejściowego (pomijając zwrotny prąd upływu). To wyjście będzie pulsować, które jest przenoszone przez rezystor obciążenia.
Przebiegi HWR
Przebiegi wejściowe i wyjściowe są pokazane na poniższym rysunku.
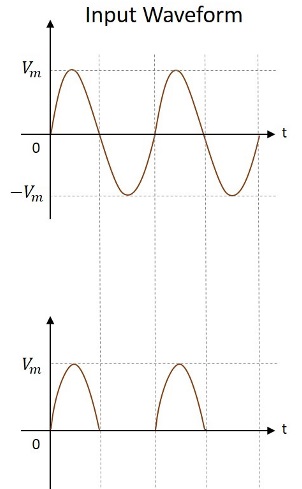
Stąd wyjście prostownika półfalowego to pulsujący prąd stały. Spróbujmy przeanalizować powyższy obwód, rozumiejąc kilka wartości, które są uzyskiwane z wyjścia prostownika półokresowego.
Analiza prostownika półfalowego
Aby przeanalizować obwód prostownika półfalowego, rozważmy równanie napięcia wejściowego.
$$v_{i}=V_{m} \sin \omega t$$
$V_{m}$ to maksymalna wartość napięcia zasilania.
Załóżmy, że dioda jest idealna.
- Opór w kierunku do przodu, tj. W stanie włączenia, wynosi $R_f$.
- Opór w odwrotnym kierunku, czyli w stanie WYŁ $R_r$.
Obecny i w diodzie lub rezystorze obciążenia $R_L$ jest dany przez
$i=I_m \sin \omega t \quad for\quad 0\leq \omega t\leq 2 \pi$
$ i=0 \quad\quad\quad\quad for \quad \pi\leq \omega t\leq 2 \pi$
Gdzie
$$I_m= \frac{V_m}{R_f+R_L}$$
Prąd wyjściowy DC
Średni prąd $I_{dc}$ jest dany przez
$$I_{dc}=\frac{1}{2 \pi}\int_{0}^{2 \pi} i \:d\left ( \omega t \right )$$
$$=\frac{1}{2 \pi}\left [ \int_{0}^{\pi}I_m \sin \omega t \:d\left ( \omega t \right )+\int_{0}^{2 \pi}0\: d\left ( \omega t \right )\right ]$$
$$=\frac{1}{2 \pi}\left [ I_m\left \{-\cos \omega t \right \}_{0}^{\pi} \right ]$$
$$=\frac{1}{2 \pi}\left [ I_m\left \{ +1-\left ( -1 \right ) \right \} \right ]=\frac{I_m}{\pi}=0.318 I_m$$
Podstawiając wartość $I_m$, mamy
$$I_{dc}=\frac{V_m}{\pi\left ( R_f+R_L \right )}$$
Gdyby $R_L >> R_f$, następnie
$$I_{dc}=\frac{V_m}{\pi R_L}=0.318 \frac{V_m}{R_L}$$
Napięcie wyjściowe DC
Napięcie wyjściowe DC jest podane przez
$$ V_{dc}=I_{dc}\times R_L=\frac{I_m}{\pi}\times R_L$$
$$=\frac{V_m\times R_L}{\pi\left (R_f+R_L \right )}=\frac{V_m}{\pi\left \{ 1+\left ( R_f/R_L \right ) \right \}}$$
Gdyby $R_L>>R_f$, następnie
$$V_{dc}=\frac{V_m}{\pi}=0.318 V_m$$
Prąd i napięcie RMS
Wartość prądu RMS jest podana przez
$$I_{rms}=\left [ \frac{1}{2 \pi}\int_{0}^{2\pi} i^{2} d\left ( \omega t \right )\right ]^{\frac{1}{2}}$$
$$I_{rms}=\left [ \frac{1}{2 \pi}\int_{0}^{2\pi}I_{m}^{2} \sin^{2}\omega t \:d\left (\omega t \right ) +\frac{1}{2\pi}\int_{\pi}^{2\pi} 0 \:d\left ( \omega t \right )\right ]^{\frac{1}{2}}$$
$$=\left [ \frac{I_{m}^{2}}{2 \pi}\int_{0}^{\pi}\left ( \frac{1-\cos 2 \omega t}{2} \right )d\left ( \omega t \right ) \right ]^{\frac{1}{2}}$$
$$=\left [ \frac{I_{m}^{2}}{4 \pi}\left \{ \left ( \omega t \right )-\frac{\sin 2 \omega t}{2} \right \}_{0}^{\pi}\right ]^{\frac{1}{2}}$$
$$=\left [ \frac{I_{m}^{2}}{4 \pi}\left \{ \pi - 0 - \frac{\sin 2 \pi}{2}+ \sin 0 \right \} \right ]^{\frac{1}{2}}$$
$$=\left [ \frac{I_{m}^{2}}{4 \pi} \right ]^{\frac{1}{2}}=\frac{I_m}{2}$$
$$=\frac{V_m}{2\left ( R_f+R_L \right )}$$
Napięcie RMS na obciążeniu wynosi
$$V_{rms}=I_{rms} \times R_L= \frac{V_m \times R_L}{2\left ( R_f+R_L \right )}$$
$$=\frac{V_m}{2\left \{ 1+\left ( R_f/R_L \right ) \right \}}$$
Gdyby $R_L>>R_f$, następnie
$$V_{rms}=\frac{V_m}{2}$$
Sprawność prostownika
Aby uzyskać lepszą wydajność, każdy obwód musi działać wydajnie. Aby obliczyć sprawność prostownika półfalowego, należy wziąć pod uwagę stosunek mocy wyjściowej do mocy wejściowej.
Sprawność prostownika określa się jako
$$\eta =\frac{d.c.power\:\: delivered \:\: to \:\: the \:\: load}{a.c.input \:\: power\:\:from\:\:transformer\:\:secondary}=\frac{P_{ac}}{P_{dc}}$$
Teraz
$$P_{dc}=\left ( {I_{dc}} \right )^2 \times R_L=\frac{I_m R_L}{\pi^2}$$
Dalej
$$P_{ac}=P_a+P_r$$
Gdzie
$P_a = power \:dissipated \:at \:the \:junction \:of \:diode$
$$=I_{rms}^{2}\times R_f=\frac{I_{m}^{2}}{4}\times R_f$$
I
$$P_r = power \:dissipated \:in \:the \:load \:resistance$$
$$=I_{rms}^{2}\times R_L=\frac{I_{m}^{2}}{4}\times R_L$$
$$P_{ac}=\frac{I_{m}^{2}}{4}\times R_f+\frac{I_{m}^{2}}{4}\times R_L =\frac{I_{m}^{2}}{4}\left ( R_f+R_L \right )$$
Z obu wyrażeń $P_{ac}$ i $P_{dc}$, możemy pisać
$$\eta =\frac{I_{m}^{2}R_L/\pi^2}{I_{m}^{2}\left ( R_f+R_L \right )/4}=\frac{4}{\pi^2}\frac{R_L}{\left ( R_f+R_L \right )}$$
$$=\frac{4}{\pi^2}\frac{1}{\left \{ 1+\left ( R_f/R_L \right ) \right \}}=\frac{0.406}{\left \{ 1+\left ( R_f/R_L \right ) \right \}}$$
Procentowa sprawność prostownika
$$\eta =\frac{40.6}{\lbrace1+\lgroup\: R_{f}/R_{L}\rgroup\rbrace}$$
Teoretycznie maksymalna wartość sprawności prostownika prostownika półfalowego wynosi 40,6%, gdy $R_{f}/R_{L} = 0$
Ponadto sprawność można obliczyć w następujący sposób
$$\eta =\frac{P_{dc}}{P_{ac}}=\frac{\left (I_{dc} \right )^2R_L}{\left ( I_{rms} \right )^2R_L}=\frac{\left ( V_{dc}/R_L \right )^2R_L}{\left (V_{rms}/R_L \right )^2R_L} =\frac{\left ( V_{dc} \right )^2}{\left ( V_{rms} \right )^2}$$
$$=\frac{\left ( V_m/ \pi \right )^2}{\left ( V_m/2 \right )^2}=\frac{4}{\pi^2}=0.406$$
$$=40.6\%$$
Ripple Factor
Wyjście wyprostowane zawiera pewną ilość obecnego w nim składnika AC w postaci tętnień. Można to zrozumieć, obserwując przebieg wyjściowy prostownika półokresowego. Aby uzyskać czysty prąd stały, musimy mieć pomysł na ten element.
Współczynnik tętnienia określa falistość wyprostowanej mocy. Jest oznaczonyy. Można to zdefiniować jako stosunek wartości skutecznej składowej AC napięcia lub prądu do wartości stałej lub wartości średniej.
$$\gamma =\frac{ripple \: voltage}{d.c \:voltage} =\frac{rms\:value\:of\: a.c.component}{d.c.value\:of\:wave}=\frac{\left ( V_r \right )_{rms}}{v_{dc}}$$
Tutaj,
$$\left ( V_r \right )_{rms}=\sqrt{V_{rms}^{2}-V_{dc}^{2}}$$
W związku z tym,
$$\gamma =\frac{\sqrt{V_{rms}^{2}-V_{dc}^{2}}}{V_{dc}}=\sqrt{\left (\frac{V_{rms}}{V_{dc}} \right )^2-1}$$
Teraz,
$$V_{rms}=\left [ \frac{1}{2\pi}\int_{0}^{2\pi} V_{m}^{2} \sin^2\omega t\:d\left ( \omega t \right ) \right ]^{\frac{1}{2}}$$
$$=V_m\left [ \frac{1}{4\pi} \int_{0}^{\pi}\left ( 1- \cos2 \:\omega t \right )d\left ( \omega t \right )\right ]^{\frac{1}{2}}=\frac{V_m}{2}$$
$$V_{dc}=V_{av}=\frac{1}{2\pi}\left [ \int_{0}^{\pi}V_m \sin \omega t \:d\left ( \omega t \right )+\int_{0}^{2\pi} 0.d\left ( \omega t \right )\right ]$$
$$=\frac{V_m}{2 \pi}\left [ -\cos \omega t \right ]_{0}^{\pi}=\frac{V_m}{\pi}$$
$$\gamma =\sqrt{\left [ \left \{ \frac{\left ( V_m/2 \right )}{\left ( V_m/\pi \right )} \right \}^2-1 \right ]}=\sqrt{\left \{ \left ( \frac{\pi}{2} \right )^2-1 \right \}}=1.21$$
Współczynnik tętnienia jest również definiowany jako
$$\gamma =\frac{\left ( I_r \right )_{rms}}{I_{dc}}$$
Ponieważ wartość współczynnika tętnienia występującego w prostowniku półokresowym wynosi 1,21, oznacza to, że ilość prądu przemiennego obecnego na wyjściu wynosi $121\%$ napięcia stałego
Rozporządzenie
Prąd przepływający przez obciążenie może się różnić w zależności od rezystancji obciążenia. Ale nawet w takich warunkach spodziewamy się, że nasze napięcie wyjściowe, które jest przenoszone na ten rezystor obciążenia, będzie stałe. Tak więc nasze napięcie musi być regulowane nawet przy różnych warunkach obciążenia.
Zmiana napięcia wyjściowego DC wraz ze zmianą prądu obciążenia DC jest definiowana jako Regulation. Regulacja procentowa jest obliczana w następujący sposób.
$$Percentage\:regulation=\frac{V_{no \:load}-V_{full\:load}}{V_{full\:load}} \times 100\%$$
Im niższa regulacja procentowa, tym lepsze byłoby zasilanie. Idealny zasilacz będzie miał zerową regulację procentową.
Współczynnik wykorzystania transformatora
Moc prądu stałego dostarczana do obciążenia w obwodzie prostownika decyduje o wartości znamionowej transformatora zastosowanego w obwodzie.
Tak więc współczynnik wykorzystania transformatora jest zdefiniowany jako
$$TUF=\frac{d.c.power\:to\:be\:delivered\:to\:the\:load}{a.c.rating\:of\:the\:transformer\:secondary}$$
$$=\frac{P_{d.c}}{P_{a.c\left ( rated \right )}}$$
Zgodnie z teorią transformatora napięcie znamionowe uzwojenia wtórnego będzie wynosić
$$V_m/\sqrt{2}$$
Rzeczywiste napięcie RMS przepływające przez niego będzie
$$I_m/2$$
W związku z tym
$$TUF=\frac{\left ( I_m/\pi \right )^2\times R_L}{\left ( V_m/\sqrt{2} \right )\times\left ( I_m/2 \right )}$$
Ale
$$V_m=I_m\left ( R_f+R_L \right )$$
W związku z tym
$$TUF=\frac{\left ( I_m/\pi \right )^2\times R_L}{\left \{ I_m\left ( R_f+R_L \right )/\sqrt{2} \right \}\times \left ( I_m/2 \right )}$$
$$=\frac{2\sqrt{2}}{\pi^2}\times \frac{R_L}{\left ( R_f+R_L \right )}$$
$$=\frac{2\sqrt{2}}{\pi^2} = 0.287$$
Szczytowe napięcie odwrotne
Dioda, gdy jest podłączona odwrotnie, powinna pracować pod kontrolowanym poziomem napięcia. Jeśli to bezpieczne napięcie zostanie przekroczone, dioda zostanie uszkodzona. Dlatego bardzo ważne jest, aby wiedzieć o tym maksymalnym napięciu.
Maksymalne napięcie odwrotne, które dioda może wytrzymać bez zniszczenia, nazywa się Peak Inverse Voltage. W skrócie,PIV.
Tutaj PIV to nic innego jak Vm
Form Factor
Można to rozumieć jako matematyczną średnią wartości bezwzględnych wszystkich punktów na przebiegu. Plikform factordefiniuje się jako stosunek wartości RMS do wartości średniej. Jest oznaczonyF.
$$F=\frac{rms\:value}{average\:value}=\frac{I_m/2}{I_m/\pi}=\frac{0.5I_m}{0.318I_m}=1.57$$
Peak Factor
Należy wziąć pod uwagę wartość piku w tętnieniu, aby wiedzieć, jak skuteczna jest rektyfikacja. Ważną kwestią jest również wartość współczynnika szczytowego.Peak factor definiuje się jako stosunek wartości szczytowej do wartości skutecznej.
W związku z tym
$$Peak Factor=\frac{Peak\:value}{r.m.s\:value}=\frac{V_m}{V_m/2}=2$$
Są to wszystkie ważne parametry, które należy wziąć pod uwagę podczas studiowania prostownika.
Obwód prostownika, który prostuje zarówno dodatnie, jak i ujemne półcykle, można określić jako prostownik pełnookresowy, ponieważ prostuje cały cykl. Konstrukcję prostownika pełnookresowego można wykonać w dwóch rodzajach. Oni są
- Prostownik pełnookresowy z gwintem centralnym
- Mostek prostownika pełnookresowego
Oba mają swoje zalety i wady. Przeanalizujmy teraz zarówno ich konstrukcję, jak i pracę z ich przebiegami, aby dowiedzieć się, który z nich jest lepszy i dlaczego.
Prostownik pełnookresowy z gwintem centralnym
Obwód prostownika, którego wtórny transformator jest odczepiany, aby uzyskać pożądane napięcie wyjściowe, przy użyciu dwóch diod naprzemiennie, w celu wyprostowania całego cyklu, nazywany jest Center-tapped Full wave rectifier circuit. W przeciwieństwie do innych obudów transformator jest tutaj zaczepiony na środku.
Cechy transformatora z centralnym odczepem to -
Gwintowanie odbywa się poprzez narysowanie przewodu w punkcie środkowym uzwojenia wtórnego. W ten sposób uzwojenie zostaje podzielone na dwie równe połowy.
Napięcie w punkcie środkowym na zaczepie wynosi zero. To tworzy punkt neutralny.
Odgałęzienie środkowe zapewnia dwa oddzielne napięcia wyjściowe, które mają równą wielkość, ale przeciwną biegunowość.
Aby uzyskać różne poziomy napięć, można wyciągnąć kilka taśm.
Transformator z odczepem centralnym z dwiema diodami prostowniczymi jest stosowany w konstrukcji a Center-tapped full wave rectifier. Schemat obwodu prostownika pełnookresowego z odczepem centralnym jest pokazany poniżej.
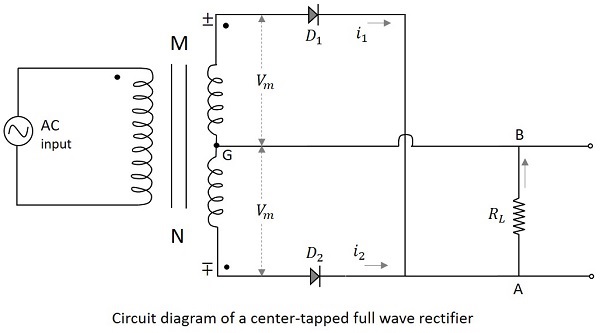
Działanie CT-FWR
Działanie prostownika pełnookresowego z gwintem centralnym można zrozumieć na powyższym rysunku. Po przyłożeniu dodatniego półcyklu napięcia wejściowego punkt M na stronie wtórnej transformatora staje się dodatni w stosunku do punktu N. To sprawia, że dioda$D_1$tendencja do przodu. Stąd obecny$i_1$ przepływa przez rezystor obciążenia od A do B. Mamy teraz dodatnie półcykle na wyjściu
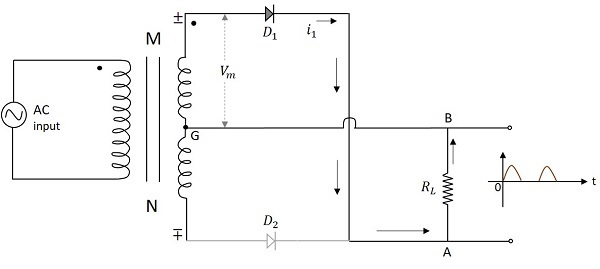
Po przyłożeniu ujemnego półcyklu napięcia wejściowego punkt M na uzwojeniu wtórnym transformatora staje się ujemny w stosunku do punktu N. To sprawia, że dioda $D_2$tendencja do przodu. Stąd obecny$i_2$ przepływa przez rezystor obciążenia od A do B. Mamy teraz dodatnie półcykle na wyjściu, nawet podczas ujemnych półcyklów na wejściu.

Przebiegi CT FWR
Przebiegi wejściowe i wyjściowe prostownika pełnookresowego z centralnym zaczepem są następujące.
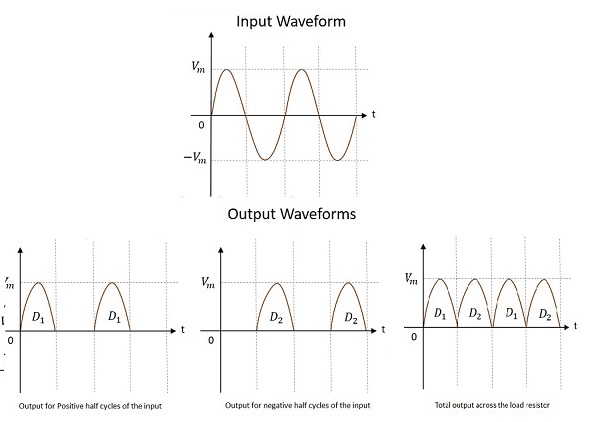
Z powyższego rysunku jasno wynika, że wynik jest uzyskiwany zarówno dla dodatnich, jak i ujemnych półcyklów. Zaobserwowano również, że wyjście na rezystorze obciążenia znajduje się wsame direction dla obu półcyklów.
Szczytowe napięcie odwrotne
Ponieważ maksymalne napięcie na połowie uzwojenia wtórnego wynosi $V_m$, całe napięcie wtórne pojawia się na nieprzewodzącej diodzie. Stądpeak inverse voltage jest dwa razy większe od maksymalnego napięcia na uzwojeniu pół-wtórnym, tj
$$PIV=2V_m$$
Niedogodności
Istnieje kilka wad prostownika pełnookresowego z gwintem centralnym, takich jak -
- Lokalizacja gwintowania centralnego jest trudna
- Napięcie wyjściowe DC jest małe
- PIV diod powinno być wysokie
Następnym rodzajem obwodu prostownika pełnookresowego jest Bridge Full wave rectifier circuit.
Mostek prostownika pełnookresowego
Jest to taki obwód prostownika pełnookresowego, który wykorzystuje cztery diody połączone w mostek, aby nie tylko wytwarzać sygnał wyjściowy podczas pełnego cyklu wejściowego, ale także eliminować wady obwodu prostownika pełnookresowego z odczepem centralnym.
W tym obwodzie nie ma potrzeby żadnego odgałęzienia transformatora do środka. Zadzwoniono na cztery diody$D_1$, $D_2$, $D_3$ i $D_4$służą do budowy sieci typu mostkowego tak, aby dwie diody przewodziły przez pół cyklu, a dwie przez drugą połowę cyklu zasilania wejściowego. Obwód mostkowego prostownika pełnookresowego pokazano na poniższym rysunku.
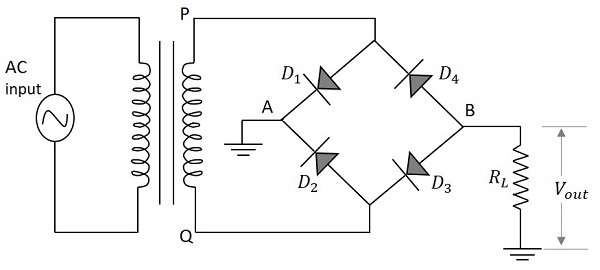
Działanie mostkowego prostownika pełnookresowego
Prostownik pełnookresowy z czterema diodami połączonymi w obwód mostkowy służy do uzyskania lepszej pełnej odpowiedzi wyjściowej. Gdy podany jest dodatni półcykl zasilania wejściowego, punkt P staje się dodatni w stosunku do punktuQ. To sprawia, że dioda$D_1$ i $D_3$ tendencja do przodu, podczas gdy $D_2$ i $D_4$odwrotna stronniczość. Te dwie diody będą teraz połączone szeregowo z rezystorem obciążenia.
Poniższy rysunek pokazuje to wraz z konwencjonalnym przepływem prądu w obwodzie.
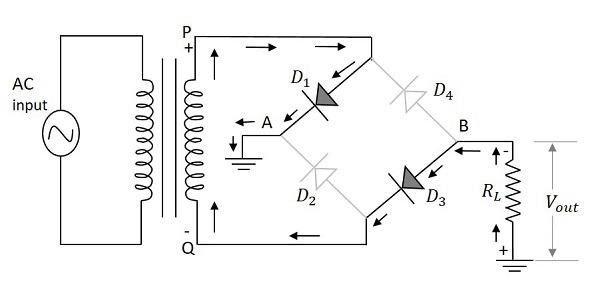
Stąd diody $D_1$ i $D_3$przewodzić podczas dodatniego półcyklu zasilania wejściowego w celu wytworzenia sygnału wyjściowego wzdłuż rezystora obciążenia. Ponieważ dwie diody pracują w celu wytworzenia sygnału wyjściowego, napięcie będzie dwukrotnie wyższe niż napięcie wyjściowe prostownika pełnookresowego z centralnym odczepem.
Kiedy podany jest ujemny półcykl zasilania wejściowego, punkt P staje się ujemny w stosunku do punktu Q. To sprawia, że dioda$D_1$ i $D_3$ odwrotna stronniczość podczas $D_2$ i $D_4$tendencja do przodu. Te dwie diody będą teraz połączone szeregowo z rezystorem obciążenia.
Poniższy rysunek pokazuje to wraz z konwencjonalnym przepływem prądu w obwodzie.
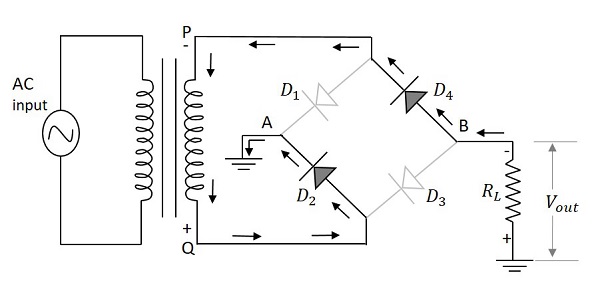
Stąd diody $D_{2}$ i $D_{4}$przewodzić podczas ujemnego półcyklu zasilania wejściowego w celu wytworzenia sygnału wyjściowego wzdłuż rezystora obciążenia. Tutaj również dwie diody wytwarzają napięcie wyjściowe. Prąd płynie w tym samym kierunku, jak podczas dodatniego półcyklu na wejściu.
Przebiegi mostka FWR
Przebiegi wejściowe i wyjściowe prostownika pełnookresowego z centralnym zaczepem są następujące.
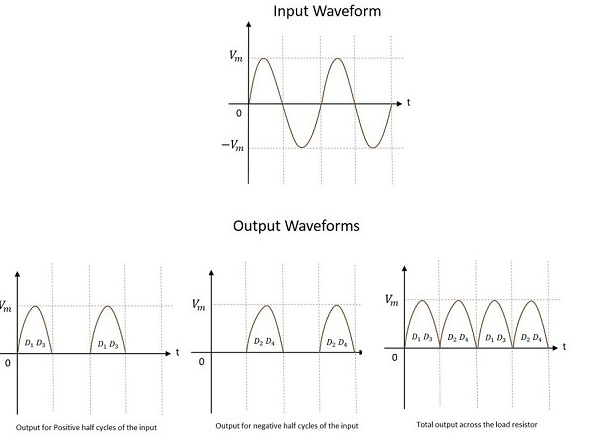
Z powyższego rysunku jasno wynika, że wynik jest uzyskiwany zarówno dla dodatnich, jak i ujemnych półcyklów. Zaobserwowano również, że wyjście na rezystorze obciążenia znajduje się wsame direction dla obu półcyklów.
Szczytowe napięcie odwrotne
Ilekroć dwie diody są równoległe do uzwojenia wtórnego transformatora, maksymalne napięcie wtórne na transformatorze pojawia się na diodach nieprzewodzących, które tworzą PIV obwodu prostownika. Stądpeak inverse voltage to maksymalne napięcie na uzwojeniu wtórnym, tj
$$PIV=V_m$$
Zalety
Mostkowy prostownik pełnookresowy ma wiele zalet, takich jak:
- Nie ma potrzeby stukania w środek.
- Napięcie wyjściowe DC jest dwa razy większe niż FWR z centralnym zaczepem.
- PIV diod jest o połowę mniejsze niż FWR zwężki środkowej.
- Konstrukcja obwodu jest łatwiejsza z lepszą wydajnością.
Przeanalizujmy teraz charakterystykę prostownika pełnookresowego.
Analiza prostownika pełnookresowego
Aby przeanalizować obwód prostownika pełnookresowego, przyjmijmy napięcie wejściowe $V_{i}$ tak jak,
$$V_{i}=V_m \sin \omega t$$
Obecny $i_1$ przez rezystor obciążenia $R_L$ jest dany przez
$$i_1=I_m \sin \omega t \quad for \quad0 \leq \omega t \leq \pi$$
$$i_1=\quad0 \quad\quad\quad for \quad \pi \leq \omega t \leq 2\pi$$
Gdzie
$$I_m=\frac{V_m}{R_f+R_L}$$
$R_f$ będąca rezystancją diody w stanie włączonym.
Podobnie, obecny $i_2$ przepływa przez diodę $D_2$ a rezystor obciążenia RL jest określony przez,
$$i_2=\quad\:0 \quad\quad\quad for \quad 0 \leq \omega t \leq \pi$$
$$i_2=I_m \sin \omega t \quad for \quad\pi \leq \omega t \leq 2\pi$$
Całkowity przepływający prąd $R_L$ jest sumą dwóch prądów $i_1$ i $i_2$ to znaczy
$$i=i_1+i_2$$
Prąd stały lub średni
Średnia wartość prądu wyjściowego, którą wskaże amperomierz prądu stałego, jest podana przez
$$I_{dc}=\frac{1}{2\pi} \int_{0}^{2\pi} i_1 \:d\left ( \omega t \right )+\frac{1}{2\pi}\int_{0}^{2\pi}i_2 \:d\left ( \omega t \right )$$
$$=\frac{1}{2\pi\int_{0}^{\pi}}I_m \sin \omega t \:d\left ( \omega t \right )+0+0+$$
$$\frac{1}{2\pi} \int_{0}^{2\pi}I_m \sin \omega t\:d\left ( \omega t \right ) $$
$$=\frac{I_m}{\pi}+ \frac{I_m}{\pi} =\frac{2I_m}{\pi}=0.636I_m$$
Jest to dwukrotność wartości prostownika półokresowego.
Napięcie wyjściowe DC
Napięcie wyjściowe DC na obciążeniu jest określone przez
$$V_{dc}=I_{dc}\times R_L = \frac{2I_mR_L}{\pi}=0.636I_mR_L$$
Zatem napięcie wyjściowe DC jest dwa razy większe niż w prostowniku półfalowym.
Prąd RMS
Wartość skuteczną prądu podaje się przez
$$I_{rms}=\left [ \frac{1}{\pi}\int_{0}^{\pi} t^2 \:d\left ( \omega t \right )\right ]^{\frac{1}{2}}$$
Ponieważ prąd ma dwie takie same formy w dwóch połówkach
$$=\left [ \frac{I_{m}^{2}}{\pi} \int_{0}^{\pi }\sin^2 \omega t\:d\left ( \omega t \right )\right ]^{\frac{1}{2}}$$
$$=\frac{I_m}{\sqrt{2}}$$
Sprawność prostownika
Sprawność prostownika określa się jako
$$\eta=\frac{P_{dc}}{P_{ac}}$$
Teraz,
$$P_{dc}=\left (V_{dc} \right )^2/R_L=\left ( 2V_m/\pi \right )^2$$
I,
$$P_{ac}=\left (V_{rms} \right )^2/R_L=\left (V_m/\sqrt{2} \right )^2$$
W związku z tym,
$$\eta =\frac{P_{dc}}{P_{ac}}=\frac{\left (2V_m/\pi \right )^2}{\left ( V_m/\sqrt{2} \right )^2}=\frac{8}{\pi^2}$$
$$=0.812=81.2\%$$
Sprawność prostownika można obliczyć w następujący sposób -
Moc wyjściowa DC,
$$P_{dc}=I_{dc}^{2}R_L=\frac{4I_{m}^{2}}{\pi^2}\times R_L$$
Moc wejściowa AC,
$$P_{ac}=I_{rms}^{2}\left (R_f+R_L \right )=\frac{I_{m}^{2}}{2}\left ( R_f+R_L \right )$$
W związku z tym,
$$\eta=\frac{4I_{m}^{2}R_L/\pi^2}{I_{m}^{2}\left ( R_f+R_L \right )/2}=\frac{8}{\pi^2}\frac{R_L}{\left ( R_f+R_L \right )}$$
$$=\frac{0.812}{\left \{ 1+\left ( R_f/R_L \right ) \right \}}$$
Dlatego wydajność procentowa wynosi
$$=\frac{0.812}{ 1+\left ( R_f+R_L \right )}$$
$$=81.2\% \quad if\: R_f=0$$
Zatem prostownik pełnookresowy ma dwukrotnie większą wydajność niż prostownik półokresowy.
Ripple Factor
Współczynnik kształtu wyprostowanego napięcia wyjściowego prostownika pełnookresowego jest określony przez
$$F=\frac{I_{rms}}{I_{dc}}=\frac{I_m/\sqrt{2}}{2I_m/\pi}=1.11$$
Współczynnik tętnienia $\gamma$ definiuje się jako (używając teorii obwodu prądu przemiennego)
$$\gamma =\left [ \left ( \frac{I_{rms}}{I_{dc}} \right )-1 \right ]^{\frac{1}{2}}=\left ( F^2 -1\right )^{\frac{1}{2}}$$
$$=\left [ \left ( 1.11 \right )^2 -1\right ]^\frac{1}{2}=0.48$$
To duża poprawa w stosunku do współczynnika tętnienia prostownika półokresowego, który wynosił 1,21
Rozporządzenie
Napięcie wyjściowe DC jest podane przez
$$V_{dc}=\frac{2I_mR_L}{\pi}=\frac{2V_mR_L}{\pi\left ( R_f+R_L \right )}$$
$$=\frac{2V_m}{\pi}\left [ 1-\frac{R_f}{R_f+R_L} \right ]=\frac{2V_m}{\pi}-I_{dc}R_f$$
Współczynnik wykorzystania transformatora
TUF prostownika półokresowego wynosi 0,287
Istnieją dwa uzwojenia wtórne w prostowniku z gwintem centralnym, a zatem TUF centralnie umieszczonego prostownika pełnookresowego jest
$$\left ( TUF \right )_{avg}=\frac{P_{dc}}{V-A\:rating\:of\:a\:transformer}$$
$$=\frac{\left ( TUF \right )_p+\left ( TUF \right )_s+\left ( TUF \right )_s}{3}$$
$$=\frac{0.812+0.287+0.287}{3}=0.693$$
Prostownik półfalowy kontra prostownik pełnookresowy
Po przejrzeniu wszystkich wartości różnych parametrów prostownika pełnookresowego, spróbujmy porównać i skontrastować cechy prostowników półfalowych i pełnookresowych.
| Warunki | Prostownik półfalowy | Środkowy gwintowany FWR | Bridge FWR |
|---|---|---|---|
| Liczba diod | $1$ | $2$ | $4$ |
| Gwintowanie transformatora | $No$ | $Yes$ | $No$ |
| Szczytowe napięcie odwrotne | $V_m$ | $2V_m$ | $V_m$ |
| Maksymalna wydajność | $40.6\%$ | $81.2\%$ | $81.2\%$ |
| Prąd średni / DC | $I_m/\pi$ | $2I_m/\pi$ | $2I_m/\pi$ |
| Napięcie DC | $V_m/\pi$ | $2V_m/\pi$ | $2V_m/\pi$ |
| Prąd RMS | $I_m/2$ | $I_m/\sqrt{2}$ | $I_m/\sqrt{2}$ |
| Ripple Factor | $1.21$ | $0.48$ | $0.48$ |
| Częstotliwość wyjściowa | $f_{in}$ | $2f_{in}$ | $2f_{in}$ |
Schemat blokowy zasilacza jasno wyjaśnia, że obwód filtra jest potrzebny za obwodem prostownika. Prostownik pomaga w przekształcaniu pulsującego prądu przemiennego w prąd stały, który płynie tylko w jednym kierunku. Do tej pory widzieliśmy różne typy obwodów prostowniczych.
Wyjścia wszystkich tych obwodów prostownika zawierają pewien współczynnik tętnienia. Zauważyliśmy również, że współczynnik tętnienia prostownika półokresowego jest większy niż prostownika pełnookresowego.
Dlaczego potrzebujemy filtrów?
Tętnienie sygnału oznacza obecność jakiejś składowej AC. Aby uzyskać czysty prąd stały, należy całkowicie usunąć ten komponent AC. Więc potrzebujemy takiego obwodusmoothens wyprostowane wyjście na czysty sygnał DC.
ZA filter circuit to taki, który usuwa składnik prądu przemiennego obecny w wyprostowanym wyjściu i pozwala składnikowi prądu stałego na osiągnięcie obciążenia.
Poniższy rysunek przedstawia funkcjonalność obwodu filtra.

Obwód filtra jest zbudowany z dwóch głównych elementów, cewki indukcyjnej i kondensatora. Nauczyliśmy się już tego w tutorialu Basic Electronics
Cewka umożliwia dc i bloki ac.
Kondensator pozwala ac i bloki dc.
Spróbujmy skonstruować kilka filtrów, używając tych dwóch elementów.
Filtr cewki szeregowej
Ponieważ induktor dopuszcza prąd stały i blokuje prąd przemienny, filtr o nazwie Series Inductor Filtermożna skonstruować łącząc cewkę szeregową między prostownikiem a obciążeniem. Poniższy rysunek przedstawia obwód szeregowego filtra cewki indukcyjnej.
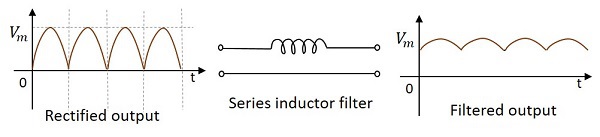
Po przejściu przez ten filtr wyprostowane wyjście cewki indukcyjnej blokuje składowe prądu przemiennego obecne w sygnale, aby zapewnić czyste napięcie stałe. To jest prosty filtr główny.
Filtr kondensatora bocznikowego
Ponieważ kondensator przepuszcza prąd przemienny i blokuje prąd stały, filtr o nazwie Shunt Capacitor Filter można skonstruować z kondensatorem podłączonym bocznikiem, jak pokazano na poniższym rysunku.
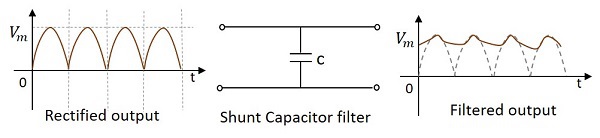
Wyprostowane wyjście po przejściu przez ten filtr, składowe prądu przemiennego obecne w sygnale są uziemione przez kondensator, który pozwala na składowe prądu przemiennego. Pozostałe składowe DC obecne w sygnale są zbierane na wyjściu.
Omówione powyżej typy filtrów są zbudowane przy użyciu cewki lub kondensatora. Teraz spróbujmy użyć obu z nich, aby stworzyć lepszy filtr. To są filtry kombinacyjne.
Filtr LC
Obwód filtru może być skonstruowany przy użyciu zarówno cewki indukcyjnej, jak i kondensatora, w celu uzyskania lepszej mocy wyjściowej, gdy można wykorzystać sprawność zarówno cewki indukcyjnej, jak i kondensatora. Poniższy rysunek przedstawia schemat obwodu filtra LC.
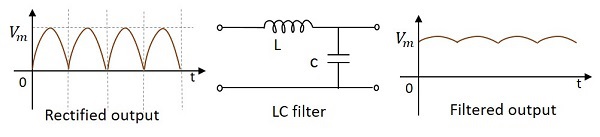
Po podaniu do tego obwodu wyprostowanego wyjścia cewka indukcyjna umożliwia przejście przez niego składowych prądu stałego, blokując składowe prądu przemiennego w sygnale. Teraz, z tego sygnału, kilka dodatkowych komponentów prądu przemiennego, jeśli są obecne, jest uziemionych, tak że otrzymujemy czyste wyjście prądu stałego.
Ten filtr jest również nazywany Choke Input Filterponieważ sygnał wejściowy najpierw wchodzi do cewki indukcyjnej. Wydajność tego filtra jest lepsza niż poprzednich.
Π- Filtr (filtr Pi)
Jest to kolejny typ obwodu filtra, który jest bardzo powszechnie używany. Ma kondensator na wejściu i dlatego jest również nazywanyCapacitor Input Filter. Tutaj dwa kondensatory i jedna cewka są połączone w postaci sieci w kształcie π. Kondensator równolegle, następnie cewka połączona szeregowo, a za nim równolegle drugi kondensator tworzy ten obwód.
W razie potrzeby można do tego dodać kilka identycznych sekcji, zgodnie z wymaganiami. Poniższy rysunek przedstawia obwód$\pi$ filtr (Pi-filter).
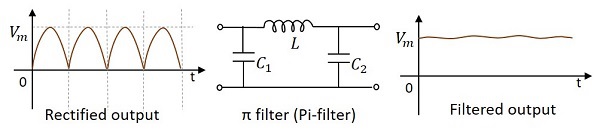
Działanie filtra Pi
W tym obwodzie mamy kondensator równolegle, następnie szeregowo cewkę indukcyjną, a następnie równolegle kolejny kondensator.
Capacitor C1- Ten kondensator filtrujący zapewnia wysoką reaktancję w stosunku do prądu stałego i niską reaktancję na sygnał prądu przemiennego. Po uziemieniu składowych prądu przemiennego obecnych w sygnale, sygnał przechodzi do cewki w celu dalszej filtracji.
Inductor L- To induktor oferuje niskie reaktancyjne składników DC, jednocześnie blokując składników ac jeśli got udało się przejść, przez kondensator C 1 .
Capacitor C2 - Teraz sygnał jest dalej wygładzany za pomocą tego kondensatora, dzięki czemu dopuszcza dowolny składnik prądu przemiennego obecny w sygnale, którego nie udało się zablokować cewki indukcyjnej.
W ten sposób otrzymujemy pożądaną czystą moc wyjściową prądu stałego przy obciążeniu.
Kolejnym i ostatnim etapem przed obciążeniem w systemie zasilania jest część Regulator. Spróbujmy teraz zrozumieć, czym jest regulator i co robi.
Część elektroniki, która zajmuje się sterowaniem i przetwarzaniem energii elektrycznej, można określić jako Power Electronics. Regulator jest ważnym urządzeniem, jeśli chodzi o elektronikę mocy, ponieważ steruje mocą wyjściową.
Potrzeba regulatora
Aby zasilacz wytwarzał stałe napięcie wyjściowe, niezależnie od zmian napięcia wejściowego lub zmian prądu obciążenia, potrzebny jest regulator napięcia.
ZA voltage regulatorto takie urządzenie, które utrzymuje stałe napięcie wyjściowe, zamiast jakichkolwiek wahań w przyłożonym napięciu wejściowym lub jakichkolwiek zmian prądu pobieranego przez obciążenie. Poniższy obraz daje wyobrażenie o tym, jak wygląda praktyczny regulator.
Rodzaje regulatorów
Regulatory można podzielić na różne kategorie, w zależności od ich działania i rodzaju połączenia.
Depending upon the type of regulation, regulatory są głównie podzielone na dwa typy, a mianowicie regulatory liniowe i regulatory obciążenia.
Line Regulator - Regulator, który reguluje napięcie wyjściowe, aby było stałe, pomimo zmian linii wejściowej, nazywa się Line regulator.
Load Regulator - Regulator, który reguluje napięcie wyjściowe na stałym poziomie, pomimo zmian obciążenia na wyjściu, nazywany jest Load regulator.
Depending upon the type of connectionistnieją dwa rodzaje regulatorów napięcia. Oni są
- Szeregowy regulator napięcia
- Bocznikowy regulator napięcia
Ich rozmieszczenie w obwodzie będzie takie, jak na poniższych rysunkach.
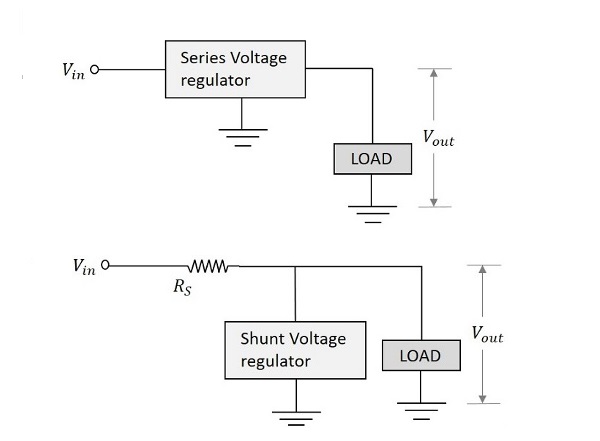
Przyjrzyjmy się innym ważnym typom regulatorów.
Regulator napięcia Zenera
Regulator napięcia Zenera to taki, który wykorzystuje diodę Zenera do regulacji napięcia wyjściowego. Szczegóły dotyczące diody Zenera omówiliśmy już w tutorialu BASIC ELECTRONICS.
Gdy dioda Zenera działa w przypadku awarii lub Zener region, napięcie na nim jest znacznie constant dla large change of currentprzez to. Ta cecha sprawia, że dioda Zenera agood voltage regulator.
Poniższy rysunek przedstawia obraz prostego regulatora Zenera.
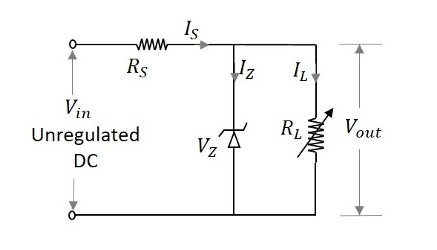
Zastosowane napięcie wejściowe $V_i$ gdy wzrośnie powyżej napięcia Zenera $V_z$, wówczas dioda Zenera działa w obszarze przebicia i utrzymuje stałe napięcie na obciążeniu. Szeregowy rezystor ograniczający$R_s$ ogranicza prąd wejściowy.
Działanie regulatora napięcia Zenera
Dioda Zenera utrzymuje stałe napięcie na niej pomimo zmian obciążenia i wahań napięcia wejściowego. Dlatego możemy rozważyć 4 przypadki, aby zrozumieć działanie regulatora napięcia Zenera.
Case 1 - Jeśli prąd obciążenia $I_L$ wzrasta, a następnie prąd płynący przez diodę Zenera $I_Z$ zmniejsza się, aby utrzymać prąd płynący przez rezystor szeregowy $R_S$stały. Napięcie wyjściowe Vo zależy od napięcia wejściowego Vi i napięcia na rezystorze szeregowym$R_S$.
Można to zapisać jako
$$V_o=V_{in}-IR_{s}$$
Gdzie $I$jest stała. W związku z tym,$V_o$ również pozostaje niezmienna.
Case 2 - Jeśli prąd obciążenia $I_L$ maleje, a następnie prąd płynący przez diodę Zenera $I_Z$ rośnie, jak prąd $I_S$przez rezystor szeregowy RS pozostaje stały. Chociaż obecny$I_Z$ przez diodę Zenera zwiększa, utrzymuje stałe napięcie wyjściowe $V_Z$, który utrzymuje stałe napięcie obciążenia.
Case 3 - Jeśli napięcie wejściowe $V_i$ wzrasta, a następnie prąd $I_S$poprzez wzrost rezystora szeregowego RS. Zwiększa to spadek napięcia na rezystorze, tj$V_S$wzrasta. Chociaż prąd przez diodę Zenera$I_Z$ wzrasta wraz z tym napięcie na diodzie Zenera $V_Z$ pozostaje stała, utrzymując stałe napięcie wyjściowe obciążenia.
Case 4 - Jeśli napięcie wejściowe spada, prąd płynący przez rezystor szeregowy maleje, co powoduje przepływ prądu przez diodę Zenera $I_Z$maleje. Ale dioda Zenera utrzymuje stałe napięcie wyjściowe ze względu na swoje właściwości.
Ograniczenia regulatora napięcia Zenera
Istnieje kilka ograniczeń dotyczących regulatora napięcia Zenera. Oni są -
- Jest mniej wydajny w przypadku dużych prądów obciążenia.
- Impedancja Zenera nieznacznie wpływa na napięcie wyjściowe.
Stąd regulator napięcia Zenera jest uważany za skuteczny w zastosowaniach niskonapięciowych. Teraz przejdźmy do innych typów regulatorów napięcia, które są wykonane za pomocą tranzystorów.
Regulator napięcia serii tranzystorów
Ten regulator ma tranzystor połączony szeregowo z regulatorem Zenera i oba równolegle do obciążenia. Tranzystor działa jako rezystor zmienny regulujący napięcie kolektora na emiterze w celu utrzymania stałego napięcia wyjściowego. Poniższy rysunek przedstawia szeregowy regulator napięcia tranzystora.
Wraz z wejściowymi warunkami pracy zmienia się prąd płynący przez podstawę tranzystora. Ma to wpływ na napięcie na złączu bazowym-emiterowym tranzystora$V_{BE}$. Napięcie wyjściowe jest utrzymywane przez napięcie Zenera$V_Z$która jest stała. Ponieważ oba są równe, każda zmiana zasilania wejściowego jest wskazywana przez zmianę napięcia podstawowego emitera$V_{BE}$.
Stąd napięcie wyjściowe Vo można rozumieć jako
$$V_O=V_Z+V_{BE}$$
Działanie regulatora napięcia serii tranzystorów
Należy wziąć pod uwagę pracę szeregowego regulatora napięcia przy zmianach na wejściu i obciążeniu. Jeśli wzrasta napięcie wejściowe, wzrasta również napięcie wyjściowe. Ale to z kolei powoduje powstanie napięcia na złączu podstawy kolektora$V_{BE}$ zmniejszyć, jak napięcie Zenera $V_Z$pozostaje stała. Przewodnictwo maleje wraz ze wzrostem rezystancji w obszarze kolektora emitera. To dodatkowo zwiększa napięcie na złączu kolektor-emiter VCE, zmniejszając tym samym napięcie wyjściowe$V_O$. Podobnie będzie, gdy napięcie wejściowe spadnie.
Gdy zachodzą zmiany obciążenia, co oznacza, że rezystancja obciążenia spada, zwiększa się prąd obciążenia $I_L$, napięcie wyjściowe $V_O$ maleje, zwiększając napięcie bazowe emitera $V_{BE}$.
Wraz ze wzrostem napięcia bazowego emitera $V_{BE}$przewodnictwo wzrasta, zmniejszając rezystancję kolektora emiterów. To z kolei zwiększa prąd wejściowy, który kompensuje spadek rezystancji obciążenia. Podobnie będzie, gdy prąd obciążenia wzrośnie.
Ograniczenia regulatora napięcia szeregowego tranzystora
Regulatory napięcia szeregowego tranzystorów mają następujące ograniczenia -
- Napięcia $V_{BE}$ i $V_Z$ na które wpływa wzrost temperatury.
- Nie jest możliwa dobra regulacja dla wysokich prądów.
- Straty mocy są wysokie.
- Straty mocy są wysokie.
- Mniej wydajne.
Aby zminimalizować te ograniczenia, stosuje się regulator bocznikowy tranzystora.
Regulator napięcia bocznika tranzystora
Obwód regulatora bocznikowego tranzystora jest tworzony przez połączenie rezystora szeregowo z wejściem i tranzystora, którego baza i kolektor są połączone za pomocą diody Zenera, która reguluje, oba równolegle do obciążenia. Poniższy rysunek przedstawia schemat obwodu regulatora bocznikowego tranzystora.
Działanie regulatora napięcia bocznika tranzystora
Jeśli napięcie wejściowe wzrośnie, $V_{BE}$ i $V_O$również wzrasta. Ale dzieje się to początkowo. Właściwie kiedy$V_{in}$ wzrasta, prąd $I_{in}$również wzrasta. Ten prąd przepływający przez RS powoduje spadek napięcia$V_S$ w poprzek rezystora szeregowego, który również wzrasta o $V_{in}$. Ale to sprawia$V_o$zmniejszyć. Teraz ten spadek$V_o$kompensuje początkowy wzrost, utrzymując go na stałym poziomie. W związku z tym$V_o$jest utrzymywana na stałym poziomie. Jeśli zamiast tego napięcie wyjściowe spada, dzieje się odwrotnie.
Jeżeli rezystancja obciążenia spada, należy zmniejszyć napięcie wyjściowe $V_o$. Prąd przepływający przez obciążenie wzrasta. Powoduje to zmniejszenie prądu bazowego i prądu kolektora tranzystora. Napięcie na rezystorze szeregowym staje się niskie, ponieważ prąd płynie silnie. Prąd wejściowy będzie stały.
Pojawi się napięcie wyjściowe, będące różnicą między przyłożonym napięciem $V_i$ i spadek napięcia szeregowego $V_s$. Stąd napięcie wyjściowe zostanie zwiększone, aby skompensować początkowy spadek, a tym samym utrzymane na stałym poziomie. Odwrotna sytuacja ma miejsce, gdy wzrasta rezystancja obciążenia.
Regulatory IC
Regulatory napięcia są obecnie dostępne w postaci układów scalonych (IC). Są one w skrócie nazywane regulatorami IC.
Oprócz funkcji normalnego regulatora, regulator IC ma takie właściwości jak kompensacja termiczna, ochrona przed zwarciem i ochrona przeciwprzepięciowa, które są wbudowane w urządzenie.
Rodzaje regulatorów IC
Regulatory IC mogą być następujących typów -
- Naprawiono dodatnie regulatory napięcia
- Naprawiono ujemne regulatory napięcia
- Regulowane regulatory napięcia
- Regulatory napięcia z podwójnym śledzeniem
Omówmy je teraz szczegółowo.
Naprawiono dodatni regulator napięcia
Wyjście tych regulatorów jest ustalone na określoną wartość, a wartości są dodatnie, co oznacza, że dostarczane napięcie wyjściowe jest napięciem dodatnim.
Najczęściej używaną serią jest seria 7800, a układy scalone będą podobne do IC 7806, IC 7812 i IC 7815 itp., Które zapewniają odpowiednio + 6v, + 12v i + 15v jako napięcia wyjściowe. Poniższy rysunek przedstawia IC 7810 podłączony w celu zapewnienia stałego, dodatnio regulowanego napięcia wyjściowego 10V.
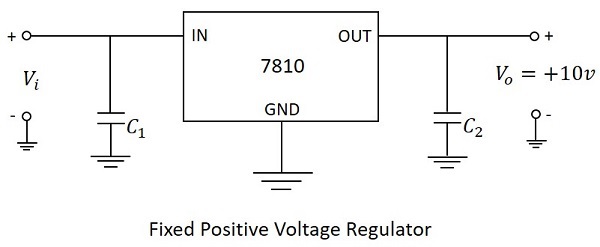
Na powyższym rysunku kondensator wejściowy $C_1$ służy do zapobiegania niepożądanym oscylacjom i kondensatorowi wyjściowemu $C_2$ działa jak filtr liniowy poprawiający odpowiedź przejściową.
Naprawiono ujemny regulator napięcia
Wyjście tych regulatorów jest ustalone na określoną wartość, a wartości są ujemne, co oznacza, że dostarczane napięcie wyjściowe jest napięciem ujemnym.
Najczęściej używaną serią jest seria 7900, a układy scalone będą podobne do IC 7906, IC 7912 i IC 7915 itp., Które zapewniają odpowiednio -6v, -12v i -15v jako napięcia wyjściowe. Poniższy rysunek przedstawia IC 7910 podłączony w celu zapewnienia stałego ujemnego regulowanego napięcia wyjściowego 10 V.
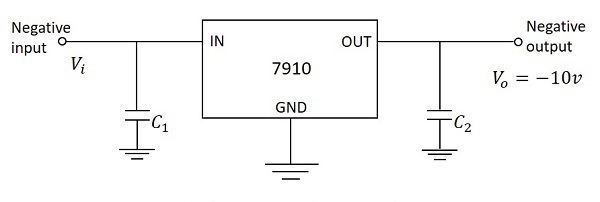
Na powyższym rysunku kondensator wejściowy $C_1$ służy do zapobiegania niepożądanym oscylacjom i kondensatorowi wyjściowemu $C_2$ działa jak filtr liniowy poprawiający odpowiedź przejściową.
Regulowane regulatory napięcia
Regulowany regulator napięcia ma trzy zaciski IN, OUT i ADJ. Zaciski wejściowe i wyjściowe są wspólne, podczas gdy zacisk regulowany jest wyposażony w rezystor zmienny, który umożliwia zmianę wartości wyjściowej w szerokim zakresie.
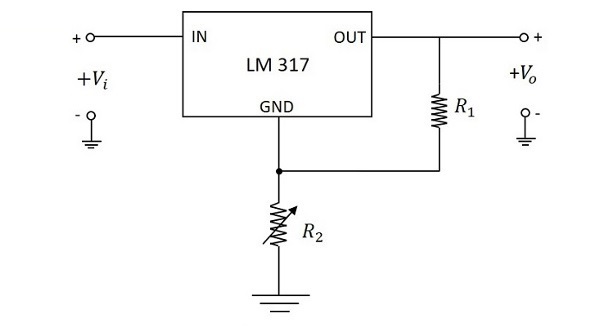
Powyższy rysunek przedstawia nieregulowany zasilacz napędzający regulowany regulator IC LM 317, który jest powszechnie używany. LM 317 to trójzaciskowy dodatni regulowany regulator napięcia, który może dostarczać 1,5 A prądu obciążenia w regulowanym zakresie wyjściowym od 1,25 V do 37 V.
Regulatory napięcia z podwójnym śledzeniem
Regulator z podwójnym śledzeniem jest używany, gdy potrzebne są napięcia podzielonego zasilania. Zapewniają one równe dodatnie i ujemne napięcia wyjściowe. Na przykład układ scalony RC4195 zapewnia wyjścia DC o napięciu + 15 V i -15 V. Wymaga to dwóch nieregulowanych napięć wejściowych, takich jak dodatnie wejście może zmieniać się od + 18 V do + 30 V, a ujemne napięcie wejściowe może zmieniać się od -18 V do -30 V.
Powyższy obraz przedstawia regulator IC RC4195 z podwójnym śledzeniem. Dostępne są również regulowane regulatory z podwójnym sczepieniem, których moc wyjściowa waha się między dwoma wartościami granicznymi.
Tematy poruszane do tej pory dotyczą różnych działów zasilacza. Wszystkie te sekcje razem tworzą plikLinear Power Supply. Jest to konwencjonalna metoda uzyskiwania prądu stałego z wejściowego źródła zasilania prądem przemiennym.
Liniowy zasilacz
Zasilacz liniowy (LPS) to zasilacz regulowany, który rozprasza dużo ciepła w rezystorze szeregowym, aby regulować napięcie wyjściowe, które ma niskie tętnienia i niski poziom szumów. Ten LPS ma wiele zastosowań.
Liniowy zasilacz wymaga większych urządzeń półprzewodnikowych do regulacji napięcia wyjściowego i generuje więcej ciepła, co skutkuje niższą wydajnością energetyczną. Zasilacze liniowe mają czasy reakcji przejściowej do 100 razy krótsze niż inne, co jest bardzo ważne w niektórych wyspecjalizowanych obszarach.
Zalety LPS
- Zasilanie jest ciągłe.
- Obwód jest prosty.
- To są niezawodne systemy.
- Ten system dynamicznie reaguje na zmiany obciążenia.
- Rezystancje obwodu są zmieniane w celu regulacji napięcia wyjściowego.
- Ponieważ komponenty działają w obszarze liniowym, szum jest niski.
- Tętnienia są bardzo niskie w napięciu wyjściowym.
Wady LPS
- Zastosowane transformatory są cięższe i większe.
- Odprowadzanie ciepła jest większe.
- Sprawność zasilacza liniowego wynosi od 40 do 50%
- W obwodach LPS energia jest marnowana w postaci ciepła.
- Uzyskuje się pojedyncze napięcie wyjściowe.
Przeszliśmy już przez różne części zasilacza liniowego. Schemat blokowy zasilacza liniowego przedstawiono na poniższym rysunku.

Pomimo powyższych wad, liniowe zasilacze są szeroko stosowane we wzmacniaczach o niskim poziomie szumów, sprzęcie testowym, obwodach sterujących. Ponadto znajdują również zastosowanie w akwizycji danych i przetwarzaniu sygnałów.
Wszystkie systemy zasilania, które wymagają prostej regulacji i gdzie sprawność nie ma znaczenia, stosowane są obwody LPS. Ponieważ szum elektryczny jest niższy, LPS jest używany do zasilania czułych obwodów analogowych. Aby jednak przezwyciężyć wady systemu zasilania liniowego, stosuje się zasilacz impulsowy (SMPS).
Zasilacz impulsowy (SMPS)
Wady LPS, takie jak niższa wydajność, potrzeba dużej wartości kondensatorów w celu zmniejszenia tętnień oraz ciężkich i kosztownych transformatorów itp., Są przezwyciężane poprzez zastosowanie Switched Mode Power Supplies.
Działanie SMPS można po prostu zrozumieć, wiedząc, że tranzystor używany w LPS służy do kontrolowania spadku napięcia, podczas gdy tranzystor w SMPS jest używany jako controlled switch.
Pracujący
Działanie SMPS można zrozumieć na poniższym rysunku.
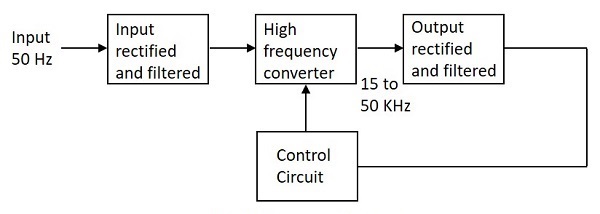
Spróbujmy zrozumieć, co dzieje się na każdym etapie obwodu SMPS.
Stopień wejściowy
Sygnał wejściowy AC 50 Hz jest podawany bezpośrednio do prostownika i kombinacji obwodu filtra bez użycia transformatora. To wyjście będzie miało wiele odmian, a wartość pojemności kondensatora powinna być wyższa, aby sprostać fluktuacjom wejściowym. Ten nieregulowany prąd stały jest podawany do centralnej sekcji przełączającej SMPS.
Sekcja przełączania
W tej sekcji zastosowano szybkie urządzenie przełączające, takie jak tranzystor mocy lub MOSFET, które włącza i wyłącza w zależności od zmian, a wyjście to jest przekazywane do uzwojenia pierwotnego transformatora obecnego w tej sekcji. Zastosowane tutaj transformatory są znacznie mniejsze i lżejsze w porównaniu z transformatorami używanymi do zasilania 60 Hz. Są one znacznie wydajne, a zatem współczynnik konwersji mocy jest wyższy.
Stopień wyjściowy
Sygnał wyjściowy z sekcji przełączającej jest ponownie prostowany i filtrowany, aby uzyskać wymagane napięcie DC. Jest to regulowane napięcie wyjściowe, które jest następnie podawane do obwodu sterującego, który jest obwodem sprzężenia zwrotnego. Ostateczny wynik uzyskuje się po uwzględnieniu sygnału zwrotnego.
Jednostka sterująca
Ta jednostka jest obwodem sprzężenia zwrotnego, który ma wiele sekcji. Pozwól nam jasno zrozumieć to na poniższym rysunku.
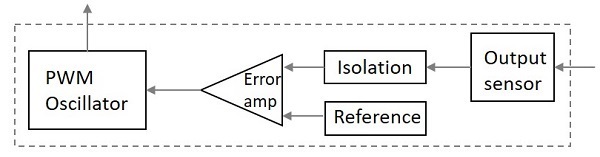
Powyższy rysunek wyjaśnia wewnętrzne części jednostki sterującej. Czujnik wyjściowy wyczuwa sygnał i łączy go z jednostką sterującą. Sygnał jest izolowany od drugiej sekcji, więc żadne nagłe skoki nie powinny wpływać na obwody. Napięcie odniesienia podawane jest jako jedno wejście wraz z sygnałem do wzmacniacza błędu, który jest komparatorem, który porównuje sygnał z wymaganym poziomem sygnału.
Kontrolując częstotliwość przerywania, utrzymywany jest końcowy poziom napięcia. Jest to kontrolowane przez porównanie danych wejściowych podawanych do wzmacniacza błędu, którego wyjście pomaga zdecydować, czy zwiększyć, czy zmniejszyć częstotliwość przerywania. Oscylator PWM wytwarza standardową stałą częstotliwość fali PWM.
Możemy uzyskać lepszy obraz pełnego funkcjonowania SMPS, patrząc na poniższy rysunek.
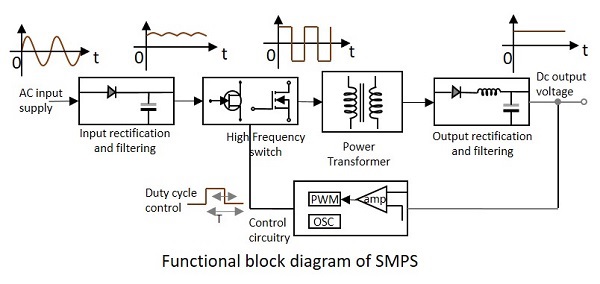
SMPS jest używany głównie tam, gdzie przełączanie napięć nie stanowi żadnego problemu i gdzie naprawdę liczy się wydajność systemu. Jest kilka punktów, na które należy zwrócić uwagę w odniesieniu do SMPS. Oni są
Obwód SMPS jest obsługiwany przez przełączanie, a zatem napięcia zmieniają się w sposób ciągły.
Urządzenie przełączające pracuje w trybie nasycenia lub odcięcia.
Napięcie wyjściowe jest kontrolowane przez czas przełączania obwodu sprzężenia zwrotnego.
Czas przełączania jest regulowany poprzez dostosowanie cyklu pracy.
Wydajność SMPS jest wysoka, ponieważ zamiast rozpraszać nadmiar mocy w postaci ciepła, w sposób ciągły przełącza swoje wejście, aby sterować wyjściem.
Niedogodności
SMPS ma kilka wad, takich jak
- Hałas jest spowodowany przełączaniem wysokiej częstotliwości.
- Obwód jest złożony.
- Wytwarza zakłócenia elektromagnetyczne.
Zalety
Zalety SMPS obejmują:
- Sprawność od 80 do 90%
- Mniejsze wytwarzanie ciepła; mniejsze straty mocy.
- Zmniejszone sprzężenie harmoniczne w sieci zasilającej.
- Urządzenie jest kompaktowe i niewielkie.
- Koszt produkcji jest obniżony.
- Zapewnienie wymaganej liczby napięć.
Aplikacje
Istnieje wiele zastosowań SMPS. Znajdują zastosowanie w płytach głównych komputerów, ładowarkach do telefonów komórkowych, pomiarach HVDC, ładowarkach akumulatorów, centralnej dystrybucji energii, pojazdach silnikowych, elektronice użytkowej, laptopach, systemach bezpieczeństwa, stacjach kosmicznych itp.
Rodzaje SMPS
SMPS to obwód zasilacza impulsowego, który jest przeznaczony do uzyskiwania regulowanego napięcia wyjściowego DC z nieregulowanego napięcia DC lub AC. Istnieją cztery główne typy SMPS, takie jak
- Konwerter DC na DC
- Konwerter AC na DC
- Fly Back Converter
- Konwerter do przodu
Część konwersji AC na DC w sekcji wejściowej stanowi różnicę między przetwornicą AC na DC i przetwornicą DC na DC. Konwerter Fly back jest używany w aplikacjach o małej mocy. Istnieją również konwertery Buck i Boost w typach SMPS, które zmniejszają lub zwiększają napięcie wyjściowe w zależności od wymagań. Drugi typ SMPS obejmuje samoscylujący konwerter fly-back, konwerter buck-boost, Cuk, Sepic itp.