Energoelektronika - Krótki przewodnik
Energoelektronika odnosi się do procesu kontrolowania przepływu prądu i napięcia i przekształcania ich w formę odpowiednią dla obciążeń użytkownika. Najbardziej pożądanym układem energoelektronicznym jest taki, którego sprawność i niezawodność wynosi 100%.
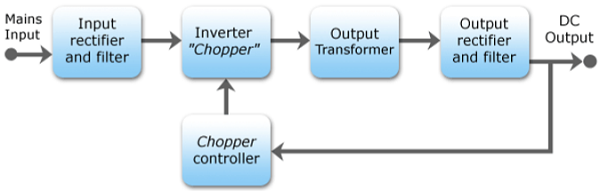
Spójrz na poniższy schemat blokowy. Pokazuje elementy systemu Power Electronic i ich wzajemne powiązania.
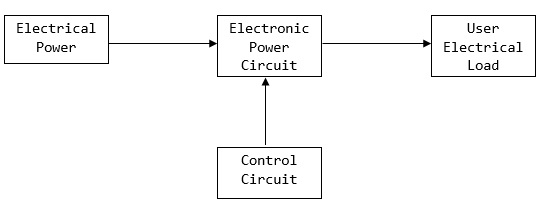
System energoelektroniczny przekształca energię elektryczną z jednej postaci w drugą i zapewnia osiągnięcie następujących efektów:
- Maksymalna efektywność
- Maksymalna niezawodność
- Maksymalna dostępność
- Minimalny koszt
- Najmniejsza waga
- Mały rozmiar
Zastosowania energoelektroniki dzieli się na dwa typy - aplikacje statyczne i aplikacje napędowe.
Aplikacje statyczne
Wykorzystuje to ruchome i / lub obracające się części mechaniczne, takie jak spawanie, ogrzewanie, chłodzenie i galwanizacja oraz prąd stały.
Zasilacz

Aplikacje napędowe
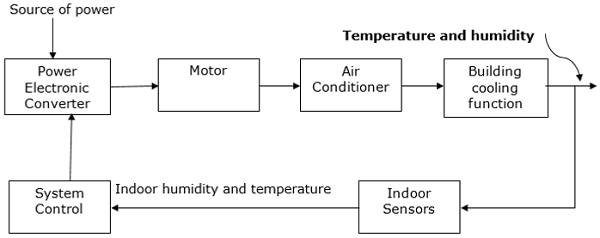
Aplikacje napędowe mają obracające się części, takie jak silniki. Przykłady obejmują kompresory, pompy, przenośniki taśmowe i systemy klimatyzacji.
System klimatyzacji
Elektronika mocy jest szeroko stosowana w klimatyzatorach do sterowania elementami, takimi jak sprężarki. Schemat przedstawiający sposób wykorzystania elektroniki mocy w klimatyzatorach pokazano poniżej.
Energoelektroniczne urządzenie przełączające to połączenie aktywnych, przełączalnych półprzewodnikowych sterowników mocy, które zostały zintegrowane w jeden. Główne cechy przełącznika są określone przez wewnętrzną korelację funkcji i interakcji jego zintegrowanego systemu. Poniższy rysunek przedstawia sposób działania elektronicznego systemu przełączników mocy.
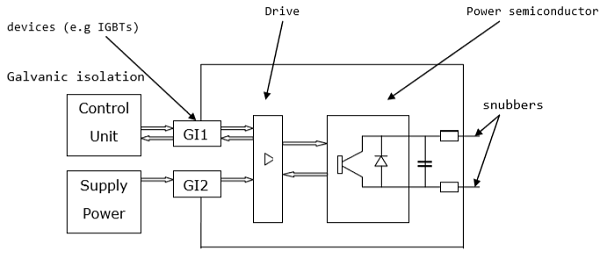
Zewnętrzny obwód powyższego schematu jest zwykle utrzymywany na wysokim potencjale w stosunku do jednostki sterującej. Nadajniki indukcyjne służą do obsługi wymaganej różnicy potencjałów między dwoma interfejsami.
Urządzenia przełączające moc są zwykle wybierane na podstawie wartości znamionowej, z jaką radzą sobie z mocą, to znaczy iloczynu ich prądu i napięcia znamionowego zamiast szybkości rozpraszania mocy. W konsekwencji główną atrakcyjną cechą przełącznika energoelektronicznego jest jego zdolność do rozpraszania małej lub prawie zerowej mocy. W rezultacie przełącznik elektroniczny jest w stanie osiągnąć niski i ciągły wzrost mocy.
Liniowe elementy obwodu odnoszą się do elementów obwodu elektrycznego, które wykazują liniową zależność między wejściem prądowym a wyjściowym napięciem. Przykłady elementów z obwodami liniowymi obejmują -
- Resistors
- Capacitors
- Inductors
- Transformers
Aby lepiej zrozumieć elementy obwodów liniowych, konieczna jest analiza elementów rezystorowych.
Rezystory
Rezystor to urządzenie, w którym przepływ prądu elektrycznego jest ograniczony, co powoduje konwersję energii. Na przykład, kiedy elektryczność przepływa przez żarówkę, jest ona przekształcana w inną formę energii, taką jak ciepło i / lub światło. Rezystancja elementu jest mierzona w omach (Ω).
Miarą rezystancji w danym obwodzie jest -
$$R=\rho \frac{L}{A}$$Gdzie R - opór; ρ - rezystywność; L- długość drutu; iA - pole przekroju poprzecznego drutu
Symbol różnych rezystorów
| Rezystor |

|
| Rezystor zmienny |
|
| Potencjometr |
|
Kondensatory
Kondensator odnosi się do urządzenia elektrycznego, które ma dwa materiały przewodzące (znane również jako płytki) oddzielone izolatorem znanym jako dielektryk. Wykorzystuje pole elektryczne do magazynowania energii elektrycznej. Pole elektryczne rozwija się, gdy kondensator jest podłączony do akumulatora, co powoduje, że dodatnie ładunki elektryczne gromadzą się na jednej płycie, a ujemne ładunki elektryczne na drugiej.
Kiedy energia jest magazynowana w polu elektrycznym kondensatora, proces nazywa się ładowaniem, a gdy energia jest usuwana, proces nazywany jest rozładowywaniem. Poziom energii elektrycznej zmagazynowanej w kondensatorze nazywany jest pojemnością i jest mierzony w faradach (F). Jeden farad to to samo, co jeden kulomb na jednostkę V podany przez 1 C / V.
Różnica między kondensatorem a baterią polega na tym, że kondensator magazynuje energię elektryczną, podczas gdy bateria magazynuje energię chemiczną i uwalnia ją w wolnym tempie.
Symbol różnych kondensatorów
W poniższej tabeli podano różne symbole kondensatora.
| Kondensator stały |
|
| Kondensator zmienny |
|
| Kondensator polaryzacyjny |
|
Cewki indukcyjne
Induktory to urządzenia elektroniczne, które wykorzystują pole magnetyczne do magazynowania energii elektrycznej. Najprostszą formą cewki indukcyjnej jest cewka lub drut w postaci pętli, w której indukcyjność jest wprost proporcjonalna do liczby pętli w przewodzie. Ponadto indukcyjność zależy od rodzaju materiału w przewodzie i promienia pętli.
Biorąc pod uwagę określoną liczbę zwojów i rozmiar promienia, tylko rdzeń powietrzny może dawać najmniejszą indukcyjność. Materiały dielektryczne, które służą temu samemu celowi, co powietrze, to drewno, szkło i plastik. Materiały te pomagają w procesie nawijania cewki indukcyjnej. Kształt uzwojeń (kształt pączka), a także substancje ferromagnetyczne, na przykład żelazo, zwiększają całkowitą indukcyjność.
Ilość energii, jaką może przechowywać cewka indukcyjna, nazywana jest indukcyjnością. Jest mierzona w Henryku (H).
Symbol różnych cewek
| Naprawiono cewkę |
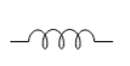
|
| Zmienna cewka |
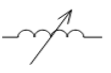
|
Transformers
Odnosi się to do urządzenia, które zmienia energię z jednego poziomu na inny w procesie znanym jako indukcja elektromagnetyczna. Zwykle jest używany do podwyższania lub obniżania napięcia AC w aplikacjach wykorzystujących energię elektryczną.
Gdy prąd po stronie pierwotnej transformatora ulega zmianie, na jego rdzeniu powstaje zmienny strumień magnetyczny, który rozprzestrzenia się na uzwojenia wtórne transformatora w postaci pól magnetycznych.
Zasada działania transformatora opiera się na prawie indukcji elektromagnetycznej Faradaya. Prawo stanowi, że szybkość zmiany strumienia łącza względem czasu jest bezpośrednio związana z polem elektromagnetycznym indukowanym w przewodniku.
Transformator składa się z trzech głównych części -
- Uzwojenie pierwotne
- Rdzeń magnetyczny
- Uzwojenie wtórne
Symbol transformatora
Dodatkowe urządzenia
Urządzenia elektromagnetyczne
Pojęcie elektromagnetyzmu jest szeroko stosowane w technologii i jest stosowane w silnikach, generatorach i dzwonkach elektrycznych. Na przykład w dzwonku do drzwi składnik elektromagnetyczny przyciąga klapę, która uderza w dzwonek i powoduje, że dzwoni.
Kontrolery
Sterowniki to urządzenia, które odbierają sygnały elektroniczne przesyłane z mierzonej zmiennej w procesie i porównują uzyskaną wartość z zadaną wartością sterowania. Wykorzystuje cyfrowe algorytmy do korelacji i porównywania funkcji.
Czujniki
Czujniki służą do określania prądu, który stale się zmienia, aby zapewnić sprzężenie zwrotne do celów sterowania. Prąd wykrywania umożliwia uzyskanie płynnej i dokładnej funkcji przetwornika. Czujniki prądu są krytyczne w przetwornicach, tak że informacje w przetwornikach równoległych lub wielofazowych są łatwo udostępniane.
Filtry
Filtry elektroniczne są również używane do przetwarzania sygnałów w celu usunięcia niepożądanych częstotliwości. Są to obwody analogowe i istnieją w stanie aktywnym lub pasywnym.
Prostownik sterowany krzemem lub prostownik sterowany półprzewodnikiem to czterowarstwowe urządzenie kontrolujące prąd w stanie stałym. Nazwa „prostownik sterowany silikonem” to nazwa handlowa General Electric dla pewnego typu tyrystora.
SCR są używane głównie w urządzeniach elektronicznych, które wymagają kontroli wysokiego napięcia i mocy. To sprawia, że można je stosować w operacjach o średniej i dużej mocy AC, takich jak funkcja sterowania silnikiem.
SCR przewodzi, gdy jest do niego przyłożony impuls bramki, podobnie jak dioda. Ma cztery warstwy półprzewodników, które tworzą dwie struktury, a mianowicie; NPNP lub PNPN. Ponadto ma trzy złącza oznaczone jako J1, J2 i J3 oraz trzy zaciski (anoda, katoda i bramka). SCR jest schematycznie przedstawiony, jak pokazano poniżej.
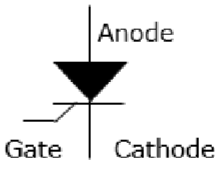
Anoda łączy się z typem P, katoda z typem N, a bramka z typem P, jak pokazano poniżej.
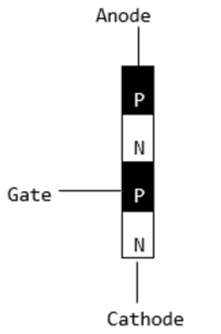
W SCR, wewnętrznym półprzewodnikiem jest krzem, do którego wprowadzane są wymagane domieszki. Jednak domieszkowanie złącza PNPN zależy od zastosowania SCR.
Tryby działania w SCR
OFF state (forward blocking mode)- Tutaj anodzie jest przypisane napięcie dodatnie, bramka ma przypisane napięcie zerowe (odłączone), a katodzie przypisane jest napięcie ujemne. W rezultacie, złącza J1 i J3 mają odchylenie w przód, podczas gdy J2 w kierunku wstecz. J2 osiąga swoją awaryjną wartość lawinową i zaczyna działać. Poniżej tej wartości rezystancja J1 jest znacznie wysoka i dlatego mówi się, że jest w stanie wyłączonym.
ON state (conducting mode)- SCR jest doprowadzany do tego stanu albo przez zwiększenie różnicy potencjałów między anodą a katodą powyżej napięcia lawinowego lub przez przyłożenie dodatniego sygnału do bramki. Natychmiast SCR zaczyna przewodzić, napięcie bramki nie jest już potrzebne do utrzymania stanu włączenia i dlatego jest wyłączane przez -
Zmniejszenie przepływu prądu przez niego do najniższej wartości zwanej prądem podtrzymania
Za pomocą tranzystora umieszczonego w poprzek złącza.
Reverse blocking- To kompensuje spadek napięcia przewodzenia. Wynika to z faktu, że potrzebny jest obszar o niskiej domieszce w P1. Ważne jest, aby pamiętać, że napięcia znamionowe blokowania do przodu i do tyłu są równe.
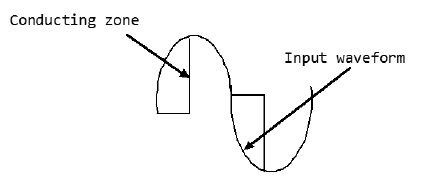
Akronim TRIAC oznacza Triode dla prądu przemiennego. TRIAC to urządzenie półprzewodnikowe z trzema zaciskami, które kontrolują przepływ prądu, stąd nazwa Triac. W przeciwieństwie do SCR, TRIAC jest dwukierunkowy, podczas gdy SCR jest dwukierunkowy. Jest idealny do pracy z wykorzystaniem zasilania AC do celów przełączania, ponieważ może kontrolować przepływ prądu dla obu połówek cyklu prądu przemiennego. Wyjaśniono to wyraźnie na poniższym diagramie.
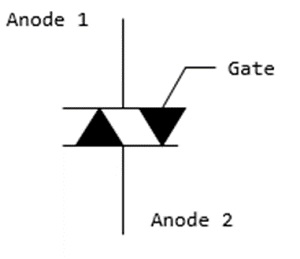
Symbol TRIAC
Schemat obwodu TRIAC pokazano poniżej. Przypomina dwa tyrystory umieszczone plecami do siebie.
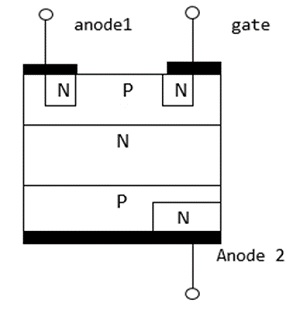
Struktura TRIAC
Struktura TRIAC jest uważana za DIAC z wbudowanym dodatkowym stykiem bramki, aby zapewnić kontrolę urządzenia. Podobnie jak inne urządzenia zasilające, TRIAC jest wykonany z krzemu. W konsekwencji proces wytwarzania krzemu prowadzi do produkcji tańszych urządzeń. Jak wskazano poniżej, TRIAC ma sześć obszarów, a mianowicie; cztery regiony typu N i dwa regiony typu P.
Działanie TRIAC
Działanie TRIAC oparte jest na tyrystorze. Ułatwia funkcję przełączania w elementach i układach elektrycznych prądu przemiennego. Są szeroko stosowane w ściemniaczach światła, ponieważ pozwalają na wykorzystanie obu połówek cyklu AC. W rezultacie sprawia, że są bardziej wydajne w zużyciu energii. O ile jest to możliwe, aby używać tyrystorów do działania jako TRIAC, nie jest to opłacalne w przypadku operacji wymagających małej mocy. Możliwe jest spojrzenie na TRIAC w odniesieniu do dwóch tyrystorów.

TRIAC są zwykle używane w aplikacjach, które nie wymagają bardzo dużej mocy, ponieważ wykazują niesymetryczne przełączanie w swojej pracy. Jest to niekorzystne w zastosowaniach wykorzystujących dużą moc, ponieważ powoduje zakłócenia elektromagnetyczne. W rezultacie TRIAC są używane w sterowaniu silnikami, ściemniaczach oświetlenia mieszkań i małych wentylatorach elektrycznych do sterowania prędkością.
Tranzystor złączowy bipolarny (BJT) to tranzystor, którego działanie zależy od zestyku dwóch półprzewodników. Może działać jako przełącznik, wzmacniacz lub oscylator. Jest znany jako tranzystor bipolarny, ponieważ do jego działania potrzebne są dwa rodzaje nośników ładunku (dziury i elektrony). Otwory stanowią dominujące nośniki ładunku w półprzewodnikach typu P, podczas gdy elektrony są głównymi nośnikami ładunku w półprzewodnikach typu N.
Symbole BJT

Struktura BJT
BJT ma dwa złącza PN połączone tyłem do siebie i dzielące wspólny region B (podstawę). Zapewnia to nawiązanie kontaktów we wszystkich regionach, które są podstawą, kolektorem i emiterem. Struktura tranzystora bipolarnego PNP jest pokazana poniżej.
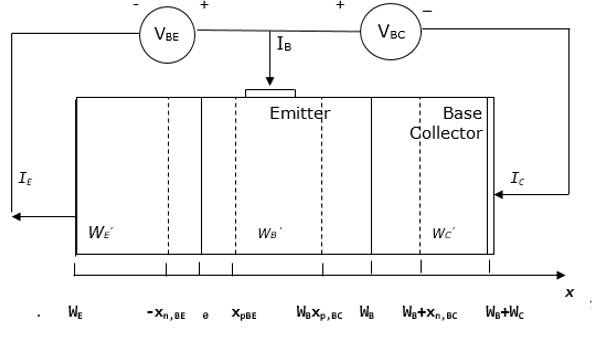
Pokazany powyżej BJT składa się z dwóch diod połączonych tyłem do siebie, co skutkuje wyczerpaniem obszarów zwanych quasi-neutralnymi. Szerokość quasi-neutralnego emitera, podstawy i kolektora jest oznaczona powyżej jako W E ', W B ' i W C '. Otrzymuje się je w następujący sposób -
$$W_{E}^{'}=W_{E}-X_{n,BE}$$ $$W_{B}^{'}=W_{B}-X_{p,BE}-X_{p,BC}$$ $$W_{C}^{'}=W_{C}-X_{n,BC}$$Konwencjonalne Znaki prądów emitera, bazę i kolektor są oznaczone przez I E , I B i I C , odpowiednio. Dlatego prąd kolektora i prądu podstawowego są dodatnie, gdy prąd dodatni spotyka się z kolektorem lub stykiem podstawy. Ponadto prąd emitera jest dodatni, gdy prąd opuszcza styk emitera. A zatem,
$$I_{E}=I_{B}+I_{C}$$Po przyłożeniu dodatniego napięcia do styku podstawy względem kolektora i emitera, napięcie baza-kolektor oraz napięcie baza-emiter stają się dodatnie.
Dla uproszczenia przyjmuje się , że V CE wynosi zero.
Dyfuzja elektronów zachodzi od emitera do podstawy, podczas gdy dyfuzja dziur pochodzi od podstawy do emitera. Gdy elektrony dotrą do obszaru zubożonego w kolektor podstawy, są przepuszczane przez ten region przez pole elektryczne. Te elektrony tworzą prąd kolektora.
Kiedy BJT jest polaryzowany w aktywnym trybie do przodu, całkowity prąd emitera jest uzyskiwany przez dodanie prądu dyfuzji elektronów ( I E, n ), prądu dyfuzji dziur ( I E, p ) i prądu podstawowego emitera.
$$I_{E}=I_{E,n}+I_{E,p}+I_{r,d}$$Całkowity prąd kolektora jest określony przez prąd dyfuzji elektronów ( I E, n ), pomniejszony o podstawowy prąd rekombinacyjny ( I r, B ).
$$I_{C}=I_{E,n}-I_{r,B}$$Suma prądu bazowego I B jest otrzymywana przez dodanie prądu dyfuzji dziurowej ( I E, p ), prądu rekombinacji bazy ( I r, B ) i prądu rekombinacji baza-emiter warstwy zubożonej ( I r, d ).
$$I_{B}=I_{E,p}+I_{r,B}+I_{r,d}$$Czynnik transportowy
Wynika to ze stosunku prądu kolektora do prądu emitera.
$$\alpha =\frac{I_{C}}{I_{E}}$$Stosując aktualne prawo Kirchhoffa, okazuje się, że prąd bazowy jest określony przez różnicę między prądem emitera a prądem kolektora.
Aktualny zysk
Wynika to ze stosunku prądu kolektora do prądu podstawowego.
$$\beta =\frac{I_{C}}{I_{B}}=\frac{\alpha }{1-\alpha }$$Powyższe wyjaśnia, w jaki sposób BJT może wytwarzać wzmocnienie prądu. Współczynnik transportu (α) zbliża się do jednego, jeśli prąd kolektora jest prawie równy prądowi emitera. W ten sposób bieżące wzmocnienie (β) staje się większe niż jeden.
Do dalszej analizy przepisujemy współczynnik transportu (α) jako iloczyn wydajności emitera (γ E ), podstawowego współczynnika transportu (α T ) i współczynnika rekombinacji warstwy zubożonej (δ r ). Został przepisany w następujący sposób -
$$\alpha =\gamma _{E}\times \alpha _{T}\times \delta _{r}$$Poniżej znajduje się podsumowanie omawianej wydajności emitera, podstawowego współczynnika transportu i współczynnika rekombinacji warstwy zubożonej.
Wydajność emitera
$$\gamma _{E}=\frac{I_{E,n}}{I_{E,p}+I_{E,P}}$$Podstawowy współczynnik transportu
$$\alpha _{T}=\frac{I_{E,n}-I_{r,b}}{I_{E,n}}$$Współczynnik rekombinacji warstwy zubożenia
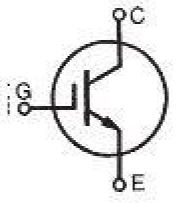
$$\delta _{r}=\frac{I_{E}-I_{r,d}}{I_{E,n}}$$Tranzystor bipolarny z izolowaną bramką (IGBT) jest urządzeniem półprzewodnikowym z trzema zaciskami i jest używany głównie jako przełącznik elektroniczny. Charakteryzuje się szybkim przełączaniem i wysoką wydajnością, co czyni go niezbędnym komponentem w nowoczesnych urządzeniach takich jak stateczniki do lamp, samochody elektryczne i napędy o zmiennej częstotliwości (VFD).
Jego zdolność do szybkiego włączania i wyłączania sprawia, że można go stosować we wzmacniaczach do przetwarzania złożonych wzorów fal z modulacją szerokości impulsu. IGBT łączy cechy tranzystorów MOSFET i BJT w celu uzyskania odpowiednio wysokiego prądu i niskiego napięcia nasycenia. Integruje izolowaną bramkę za pomocą FET (tranzystor polowy), aby uzyskać wejście sterujące.
Symbol IGBT
Wzmocnienie IGBT jest obliczane jako stosunek jego sygnału wyjściowego do sygnału wejściowego. W konwencjonalnych BJT stopień wzmocnienia (β) jest równy stosunkowi jego prądu wyjściowego do prądu wejściowego.
IGBT ma bardzo niską wartość rezystancji stanu włączenia (RON) niż tranzystor MOSFET. Oznacza to, że spadek napięcia (I 2 R) na bipolarnym dla danej operacji przełączania jest bardzo mały. Działanie blokujące w przód przez IGBT jest podobne do działania MOSFET-u.
Gdy IGBT jest używany jako kontrolowany przełącznik w stanie statycznym, jego wartości znamionowe prądu i napięcia są równe BJT. Wręcz przeciwnie, izolowana bramka w IGBT ułatwia prowadzenie ładunków BJT, a tym samym wymagana jest mniejsza moc.
IGBT jest włączany lub wyłączany w zależności od tego, czy jego zacisk bramki został aktywowany, czy dezaktywowany. Stała dodatnia różnica potencjałów między bramką a emiterem utrzymuje IGBT w stanie WŁ. Gdy sygnał wejściowy zostanie usunięty, IGBT jest wyłączany.
Zasada działania IGBT
IGBT wymaga tylko małego napięcia do utrzymania przewodnictwa w urządzeniu, w przeciwieństwie do BJT. IGBT jest urządzeniem jednokierunkowym, to znaczy może włączać się tylko w kierunku do przodu. Oznacza to, że prąd płynie od kolektora do emitera w przeciwieństwie do tranzystorów MOSFET, które są dwukierunkowe.
Zastosowania IGBT
IGBT jest używany w aplikacjach o średniej i bardzo dużej mocy, na przykład w silnikach trakcyjnych. W dużych tranzystorach IGBT można obsługiwać wysokie prądy w zakresie stu amperów i napięcia blokujące do 6 kV.
Tranzystory IGBT są również używane w urządzeniach energoelektronicznych, takich jak przetworniki, falowniki i inne urządzenia, w których konieczne jest przełączanie półprzewodnikowe. Dostępne są bipolary z wysokim prądem i napięciem. Jednak ich prędkości przełączania są niskie. Wręcz przeciwnie, tranzystory MOSFET mają wysokie prędkości przełączania, chociaż są drogie.
Tranzystor polowy typu metal-tlenek-półprzewodnik (MOSFET) to rodzaj tranzystora używanego do przełączania sygnałów elektronicznych. Ma cztery terminale, a mianowicie; source (S), Drain (D), Gate (G) and Body (B). Korpus tranzystora MOSFET jest zwykle podłączony do zacisku źródła (S), co skutkuje urządzeniem trójzaciskowym podobnym do innych tranzystorów polowych ( FET). Ponieważ te dwa główne zaciski są zwykle połączone przez zwarcie, na schematach elektrycznych widoczne są tylko trzy zaciski.
Jest to najczęściej spotykane urządzenie w obwodach, które są zarówno cyfrowe, jak i analogowe. W porównaniu do zwykłego tranzystora, tranzystor MOSFET wymaga niskiego prądu (mniej niż jeden milimper) do włączenia. Jednocześnie zapewnia wysokie obciążenie prądowe powyżej 50 amperów.
Działanie MOSFET-u
MOSFET ma cienką warstwę dwutlenku krzemu, który pełni rolę płytki kondensatora. Izolacja bramki sterującej podnosi rezystancję tranzystora MOSFET do ekstremalnie wysokich poziomów (prawie nieskończonych).
Terminal bramki jest odcięty od głównego szlaku prądowego; w ten sposób żaden prąd nie przedostaje się do bramy.
Tranzystory MOSFET występują w dwóch głównych formach -
Depletion state- Wymaga to napięcia źródła bramki (V GB ) do wyłączenia komponentu. Gdy bramka jest na zero (V GB ), urządzenie jest zwykle włączone, dlatego działa jako rezystor obciążenia dla danych obwodów logicznych. W przypadku urządzeń ładujących ze zubożeniem typu N, 3 V jest napięciem progowym, w którym urządzenie jest wyłączane przez przełączenie bramki na ujemne 3 V.
Enhancement state- W tym stanie napięcie bramka-źródło (V GB ) jest wymagane do włączenia komponentu. Gdy bramka jest na zero (V GB ), urządzenie jest zwykle WYŁĄCZONE i można je włączyć, upewniając się, że napięcie bramki jest wyższe niż napięcie źródła.
Symbol i podstawowa konstrukcja

Gdzie, D - Opróżnij; G - Brama; S- źródło; iSub - Podłoże
A (BJT) emituje prąd o wartości 1 mA i ma sprawność emitera równą 0,99. Podstawowy współczynnik transportu wynosi 0,994, a współczynnik rekombinacji warstwy zubożonej wynosi 0,997. Dla BJT obliczyć następujące -
Czynnik transportowy
Przepisany współczynnik transportu jest określony przez -
$$\alpha =\gamma _{E}\times \alpha _{T}\times \delta _{r}$$Zastępując wartości, otrzymujemy
$$\alpha =0.99\times 0.994\times 0.997=0.981$$Aktualny zysk
Aktualny zysk jest określony przez -
$$\beta =\frac{I_{C}}{I_{B}}=\frac{\alpha }{1-\alpha }$$Zastępując wartości, otrzymujemy
$$\beta =\frac{0.981}{1-0.981}=51.6$$Prąd kolektora
$$I_{C}=\alpha \times I_{E}=0.981\times 1=0.981mA$$Prąd bazowy
$$I_{B}=I_{E}-I_{C}=1-0.981=19\mu A$$Konwerter sterowany fazowo
Konwerter sterowany fazowo przekształca energię prądu przemiennego w prąd stały (komutowana w linii). Innymi słowy, jest używany do konwersji mocy prądu przemiennego o stałej częstotliwości i stałego napięcia w zmienne napięcie wyjściowe prądu stałego. Jest wyrażany jako
Fixed Input - Napięcie, częstotliwość i moc prądu przemiennego
Variable output - Wyjście napięcia stałego
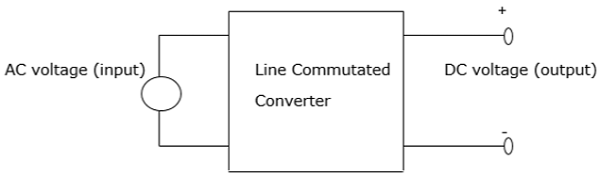
Napięcie wejściowe AC, które trafia do przekształtnika, ma zwykle stałą wartość skuteczną (RMS) i stałą częstotliwość. Włączenie do przekształtnika tyrystorów sterowanych fazowo zapewnia uzyskanie zmiennego napięcia wyjściowego DC. Jest to możliwe dzięki zmianie kąta fazowego, przy którym wyzwalane są tyrystory. W rezultacie uzyskuje się pulsujący przebieg prądu obciążenia.
Podczas półcyklu zasilania wejściowego tyrystor jest w przewodzie wstępnym i jest włączany poprzez zastosowanie wystarczającego impulsu bramki (wyzwalacza). Prąd zaczyna płynąć po włączeniu tyrystora, czyli w punkcie ωt = α do punktu ωt = β. Z chwilą spadku prądu obciążenia do zera tyrystor wyłącza się w wyniku komutacji (naturalnej) linii.
Istnieje wiele przetworników mocy, które wykorzystują naturalną komutację. Należą do nich -
- Przetwornice AC na DC
- Przetwornice AC na AC
- Kontrolery napięcia AC
- Cycloconverters
Powyższe konwertery mocy zostaną wyjaśnione w następnych rozdziałach tego samouczka.
2- Konwerter impulsów
Dwufazowy konwerter impulsów, znany również jako generator modulatora szerokości impulsu (PWM) poziomu 2, służy do generowania impulsów dla konwerterów z modulacją szerokości impulsu opartych na nośnej. Czyni to poprzez wykorzystanie topologii drugiego poziomu. Ten blok steruje urządzeniami przełączającymi do celów sterowania, takimi jak tranzystory IGBT i FET, które istnieją w trzech typach przetworników, a mianowicie -
- 1 ramię (półmostek jednofazowy)
- 2 ramiona (jednofazowy pełny most)
- 3 ramiona (most trójfazowy)
Sygnał wejściowy odniesienia w konwerterze 2-impulsowym jest porównywany z nośną. Jeśli wejściowy sygnał odniesienia jest większy niż nośna, impuls jest równy 1 dla górnego urządzenia i 0 dla dolnego urządzenia.
Do sterowania urządzeniem z jednofazowym mostkiem pełnym (2 ramiona) konieczne jest zastosowanie jednobiegunowej lub bipolarnej modulacji szerokości impulsu. W modulacji jednobiegunowej każde z dwóch ramion jest sterowane niezależnie. Drugi sygnał wejściowy odniesienia jest generowany wewnętrznie poprzez przesunięcie początkowego punktu odniesienia o 180 °
Po zastosowaniu dwubiegunowego PWM stan dolnego urządzenia przełączającego w drugim jednofazowym pełnym mostku jest podobny do górnego przełącznika w pierwszym jednofazowym urządzeniu z pełnym mostkiem. Stosowanie modulacji jednobiegunowej prowadzi do gładkich przebiegów prądu przemiennego, podczas gdy modulacja bipolarna skutkuje mniejszą zmiennością napięcia.
Konwerter 3-impulsowy
Rozważmy trójfazowy konwerter trójpulsowy, w którym każdy z tyrystorów jest w trybie przewodzenia podczas trzeciego cyklu zasilania. Najwcześniejszy moment włączenia tyrystora do przewodzenia następuje pod kątem 30 ° w odniesieniu do napięcia fazowego.
Jego działanie wyjaśniono za pomocą trzech tyrystorów i trzech diod. Gdy tyrystory T1, T2 i T3 zostaną zastąpione diodami D1, D2 i D3, przewodzenie rozpocznie się pod kątem 30 ° w odniesieniu do napięć fazowych odpowiednio u an , u bn i u cn . Dlatego kąt zapłonu α jest mierzony początkowo pod kątem 30 ° w odniesieniu do odpowiadającego mu napięcia fazowego.
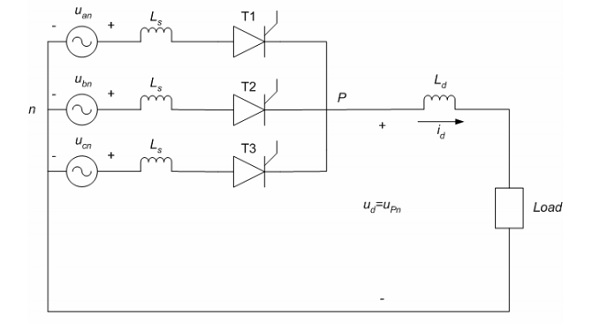
Prąd może przepływać tylko w jednym kierunku przez tyrystor, co jest podobne do trybu pracy falownika, w którym moc przepływa ze strony DC na AC. Ponadto napięcie w tyrystorach jest kontrolowane przez sterowanie kątem zapłonu. Osiąga się to, gdy α = 0 (możliwe w prostowniku). Zatem konwerter 3-impulsowy działa jako falownik i prostownik.
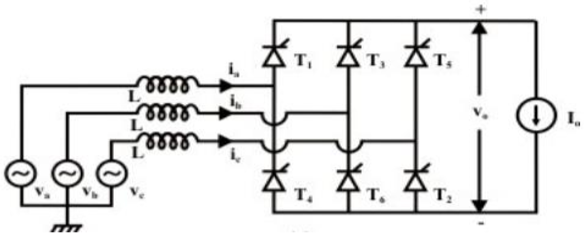
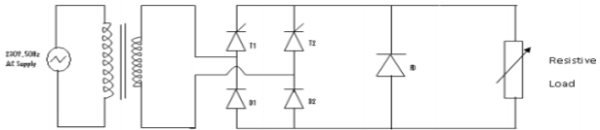
Konwerter 6-impulsowy
Poniższy rysunek przedstawia sześciopulsowy konwerter sterowany mostkiem, podłączony do źródła trójfazowego. To znaczy w tym konwerterze liczba impulsów jest dwukrotnie większa niż w przypadku fazp = 2m. Korzystając z tej samej konfiguracji konwertera, możliwe jest połączenie dwóch mostków sześciopulsowych w celu uzyskania konwertera dwunastu lub więcej impulsów.
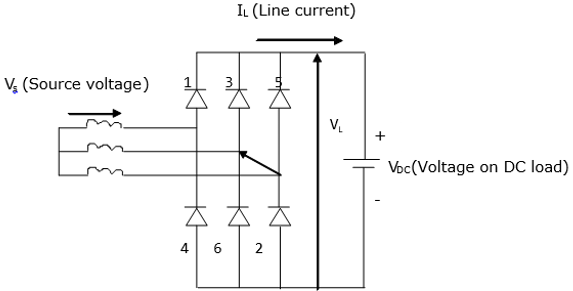
Gdy komutacja nie jest dostępna, dwie diody będą przewodzić w dowolnym momencie. Ponadto, aby uzyskać spadek napięcia na obciążeniu, należy umieścić dwie diody na przeciwległych nogach mostka. Na przykład diody 3 i 6 nie mogą świecić w tym samym czasie. Dlatego spadek napięcia na obciążeniu DC jest połączeniem napięcia sieciowego VL ze źródła trójfazowego.
Należy pamiętać, że im większa liczba impulsów, tym większe wykorzystanie konwertera. Ponadto im mniejsza liczba impulsów, tym mniejsze wykorzystanie konwertera.
Analiza większości przetworników jest zwykle uproszczona w idealnych warunkach (brak impedancji źródła). Jednak założenie to nie jest uzasadnione, ponieważ impedancja źródła jest zwykle indukcyjna z pomijalnym elementem rezystancyjnym.
Indukcyjność źródła ma znaczący wpływ na pracę przekształtnika, gdyż jej obecność zmienia napięcie wyjściowe przekształtnika. W rezultacie napięcie wyjściowe spada wraz ze spadkiem prądu obciążenia. Ponadto przebiegi prądu wejściowego i napięcia wyjściowego znacznie się zmieniają.
Wpływ indukcyjności źródła na przetwornik jest analizowany na dwa sposoby.
Wpływ na jedną fazę
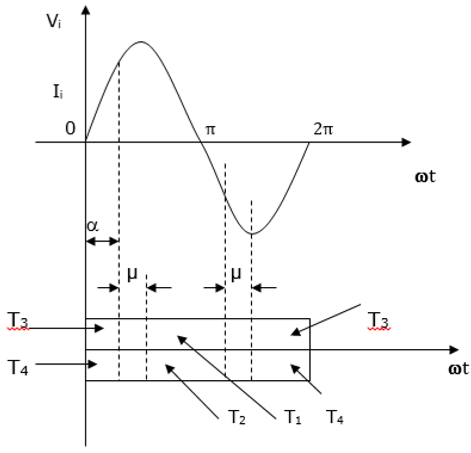
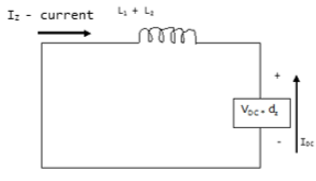
Zakładając, że konwerter pracuje w trybie przewodzenia, a tętnienie prądu obciążenia jest pomijalne, napięcie w obwodzie otwartym staje się równe średniej mocy wyjściowej DC przy kącie wyzwalania α. Poniższy schemat przedstawia w pełni sterowany przetwornik ze źródłem w jednej fazie. Zakłada się, że tyrystory T 3 i T 4 są w trybie przewodzenia, gdy t = 0. Z drugiej strony, T 1 i T 2 zapalają się, gdy ωt = α

Gdzie -
- V i = napięcie wejściowe
- I i = prąd wejściowy
- V o = napięcie wyjściowe
- I o = napięcie wyjściowe
Gdy nie ma indukcyjności źródła, komutacja nastąpi w T 3 i T 4 . Natychmiast włączają się tyrystory T 1 i T 2 . Spowoduje to natychmiastową zmianę polaryzacji wejścia. W obecności indukcyjności źródła zmiana polaryzacji i komutacja nie zachodzą natychmiast. Zatem T 3 i T 4 nie komutują, gdy tylko T 1 i T 2 zostaną włączone.
W pewnym momencie wszystkie cztery tyrystory będą przewodzić. Ten przedział przewodzenia nazywany jest przedziałem nakładania się (μ).
Nakładanie się podczas komutacji zmniejsza napięcie wyjściowe DC i kąt ekstynkcji γ, co powoduje niepowodzenie komutacji, gdy α jest bliskie 180 °. Pokazuje to poniższy przebieg.
Wpływ na trzy fazy
Podobnie jak przekształtnik jednofazowy, nie ma chwilowych komutacji ze względu na obecność indukcyjności źródła. Biorąc pod uwagę indukcyjności źródła, wpływ (jakościowy) na pracę przekształtnika jest taki sam jak w przekształtniku jednofazowym. Pokazuje to poniższy diagram.
Ważne jest, aby określić parametry wydajności dla różnych konwerterów, których topologie mogą być jednofazowe lub wielofazowe.
Założenia
- Zastosowane urządzenia są idealne, to znaczy nie mają żadnych strat
- Urządzenia mają obciążenia rezystancyjne
Napięcie DC przy obciążeniu
$$V_{DC}=\frac{1}{T} \int_{0}^{T}V_{L}\left ( t \right )dt$$Napięcie RMS przy obciążeniu
$$V_{L}=\sqrt{\frac{1}{T}}\int_{0}^{T}V_{L}^{2}\left ( t \right )dt$$Form Factor
$$FF=\frac{V_{L}}{V_{DC}}$$Ripple Factor
$$RF=\frac{\sqrt{V_{L}^{2}-V_{DC}^{2}}}{V_{DC}}=\sqrt{FF^{2}-1}$$Sprawność (współczynnik rektyfikacji)
$$\eta =\frac{P_{DC}}{P_{L}+P_{D}}$$Gdzie powyżej zdefiniowano jako -
$P_{DC}=V_{DC}\times I_{DC}$
$P_{L}=V_{L}\times I_{L}$
$P_{D}=R_{D}\times I_{L}^{2}$($P_{D}$ to straty prostownika i $R_{D}$ opór)
$$\eta =\frac{V_{DC}I_{DC}}{\left ( V_{L}I_{L} \right )+\left ( R_{D}I_{L}^{2} \right )}=\frac{V_{DC}^{2}}{V_{L}^{2}}\times \frac{1}{1+\frac{R_{D}}{R_{L}}}$$Ale $R_{D}=0$
W związku z tym,
$$\eta =\left ( \frac{V_{DC}}{V_{L}} \right )^{2}=\left ( \frac{1}{FF}\right )^{2}$$Współczynnik wykorzystania transformatora
$$TUF=\frac{P_{DC}}{VA \:Rating \:of \:the \:Transformer }=\frac{P_{DC}}{\frac{VA_{p}+VA_{s}}{2}}$$VA p i VA s to pierwotne i wtórne moce znamionowe transformatora.
W przetwornicach prądu stałego wysokiego napięcia (HVDC) stacje są komutowane liniowo. Oznacza to, że prąd początkowy zaworu może być opóźniony tylko w odniesieniu do zerowej wartości napięcia szyny przetwornicy w postaci prądu przemiennego. W konsekwencji, w celu lepszej kontroli napięcia, magistrala przekształtnika jest podłączona do źródła mocy biernej.
Źródła mocy biernej służą do zmiany kondensatorów w układach statycznych. Odpowiedź układu mocy biernej jest podyktowana regulacją napięcia w warunkach dynamicznych.
Podczas pracy z niestabilnymi sieciami prądu przemiennego często pojawiają się problemy z powodu niestabilnych skoków napięcia i przepięć. Lepsza koordynacja źródeł mocy biernej jest niezbędna, aby uprościć sterowanie kątami wystrzału. W rezultacie ta cecha przekształtnika mocy biernej jest coraz częściej stosowana w nowoczesnych przekształtnikach wykorzystujących HVDC.
Regulacja mocy biernej w stanie ustalonym
Równania wyrażające moc bierną w funkcji mocy czynnej podano w postaci wielkości jednostkowych.
Podstawowe napięcie konwertera jest określone przez -
$$V_{db}=3\sqrt{\frac{2}{\pi }}\times V_{L}$$Gdzie VL = Napięcie międzyfazowe (po stronie uzwojenia)
Base DC Current (Idb ) = Znamionowy prąd stały (Idr)
Base DC Power (Pdc)= n b × V db × I db , gdzienb = liczba mostów połączonych szeregowo
BaseBase AC voltage (Vb) = (Va)
Base AC Power = Podstawowa moc prądu stałego
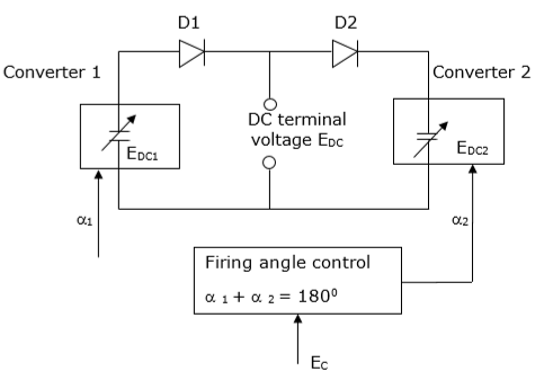
$$\sqrt{\frac{18}{\pi }}\times V_{a}\times I_{db}\times n_{b}$$Podwójne konwertery znajdują się głównie w napędach o zmiennej prędkości (VFD). W podwójnym konwerterze dwa konwertery są połączone ze sobą tyłem do siebie. Działanie podwójnego konwertera wyjaśniono na poniższym schemacie. Zakłada się, że -
Podwójny konwerter jest idealny (daje czyste wyjście DC) na swoich zaciskach.
Każdy przekształtnik dwu-kwadrantowy jest kontrolowanym źródłem prądu stałego połączonym szeregowo z diodą.
Diody D1 i D2 pokazują jednokierunkowy przepływ prądu.
Biorąc pod uwagę podwójny przetwornik działający bez prądu cyrkulacyjnego, przepływ prądu przemiennego jest zabroniony przez kontrolowane impulsy zapłonu. Zapewnia to, że konwerter przenoszący prąd obciążenia przewodzi, podczas gdy drugi przetwornik jest zablokowany. Oznacza to, że nie jest potrzebny reaktor między konwerterami.
Ładowarka
Ładowarka baterii, znana również jako ładowarka, wykorzystuje prąd elektryczny do magazynowania energii w ogniwie wtórnym. Proces ładowania zależy od rodzaju i rozmiaru baterii. Różne typy akumulatorów mają różne poziomy tolerancji na przeładowanie. Proces ładowania można osiągnąć podłączając go do źródła stałego napięcia lub prądu stałego.
Szybkość ładowania (C)
Szybkość ładowania jest definiowana jako szybkość ładowania lub rozładowywania baterii i jest równa pojemności baterii w ciągu jednej godziny.
Ładowarkę baterii określa się w kategoriach szybkości ładowania C. Na przykład ładowarka o wartości znamionowej C / 10 zapewniłaby pojemność ładowania w ciągu 10 godzin, a ładowarka o wartości znamionowej 3C ładowałaby baterię w ciągu 20 minut.
Rodzaje ładowarek akumulatorów
Istnieje wiele typów ładowarek do akumulatorów. W tym samouczku rozważymy pięć głównych typów.
Simple chargers - Działa poprzez dostarczanie stałego źródła prądu stałego do ładowanego akumulatora.
Fast chargers - Wykorzystuje obwody sterujące do szybkiego ładowania akumulatora i jednocześnie zapobiega uszkodzeniu ogniw akumulatora.
Inductive chargers - Wykorzystuje indukcję elektromagnetyczną do ładowania baterii.
Intelligent chargers - Służy do ładowania baterii zawierającej układ scalony, z którym się komunikuje the inteligentna ładowarka.
Motion powered charger- Wykorzystuje ludzki ruch do ładowania baterii. Magnes umieszczony między dwiema sprężynami jest poruszany ruchem człowieka w górę iw dół, ładując w ten sposób akumulator.
Obcowzbudny silnik prądu stałego ma parametry: 220V, 100A i 1450 obr / min. Jego twornik ma rezystancję 0,1 Ω. Ponadto zasilany jest z trójfazowego, w pełni sterowanego przetwornika podłączonego do trójfazowego źródła prądu przemiennego o częstotliwości 50 Hz i reaktancji indukcyjnej 0,5 Ω i 50 Hz. Przy α = 0 silnik pracuje przy znamionowym momencie obrotowym i prędkości. Załóżmy, że silnik hamuje ponownie, używając wstecznego kierunku przy jego prędkości znamionowej. Obliczyć maksymalny prąd, poniżej którego komutacja nie ulega zmianie.
Solution -
Wiemy to,
$$V_{db}=3\sqrt{\frac{2}{\pi }}\times V_{L}-\frac{3}{\pi }\times R_{b}\times I_{db}$$Zastępując wartości, otrzymujemy
$220=3\sqrt{\frac{2}{\pi }}\times V_{L}-\frac{3}{\pi }\times 0.5\times 100$
W związku z tym,
$V_{L}=198V$
Napięcie przy prędkości znamionowej = $220-\left ( 100\times 0.1 \right )=210V$
Przy prędkości znamionowej hamowanie odzyskowe w kierunku wstecznym,
$=3\sqrt{\frac{2}{\pi }}\times 198\cos \alpha -\left ( \frac{3}{\pi }\times 0.5+0.1\right )\times I_{db}=-210V$
Ale $\cos \alpha -\cos \left ( \mu +\alpha \right )=\frac{\sqrt{2}}{198}\times 0.5I_{db}$
Aby komutacja nie powiodła się, powinien być spełniony następujący warunek ograniczający.
$\mu +\alpha \approx 180^{\circ}$
W związku z tym, $\quad \cos \alpha =\frac{I_{db}}{198\sqrt{2}}-1$
Również,
$\frac{3}{\pi }I_{db}-\frac{3\sqrt{2}}{\pi }\times 198-\left ( \frac{3}{\pi }\times 0.5+0.1 \right )I_{db}=-210$
To daje, $\quad 0.3771I_{db}=57.4$
W związku z tym, $\quad I_{db}=152.2A$
Chopper wykorzystuje dużą prędkość do łączenia i odłączania obciążenia źródłowego. Stałe napięcie DC jest przykładane okresowo do obciążenia źródła poprzez ciągłe wyzwalanie włącznika / wyłącznika zasilania. Okres czasu, przez który wyłącznik zasilania pozostaje WŁĄCZONY lub WYŁĄCZONY, nazywany jest odpowiednio czasami stanu WŁĄCZENIA i WYŁĄCZENIA przerywacza.
Rozdrabniacze są najczęściej stosowane w samochodach elektrycznych, konwersji energii wiatrowej i słonecznej oraz regulatorach silników prądu stałego.
Symbol Choppera
Klasyfikacja chopperów
W zależności od napięcia wyjściowego czopery są klasyfikowane jako -
- Step Up chopper (konwerter boost)
- Step Down Chopper (konwerter Buck)
- Step Up / Down Chopper (konwerter buck-boost)
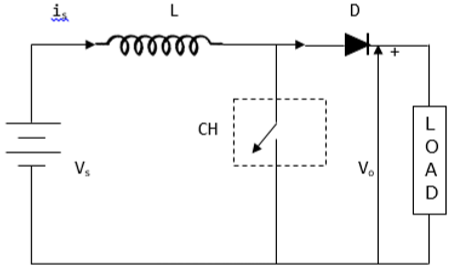
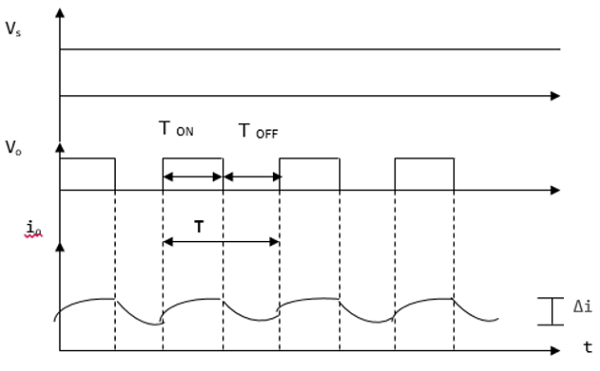
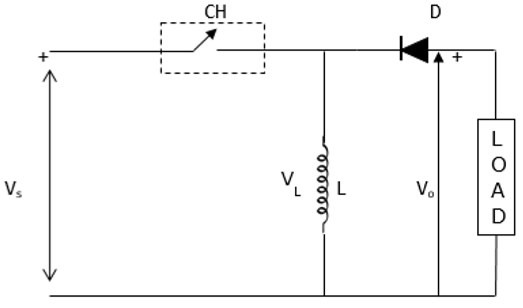
Step Up Chopper
Średnie napięcie wyjściowe (V o ) w przerywaczu podwyższającym jest większe niż napięcie wejściowe (V s ). Poniższy rysunek przedstawia konfigurację przerywacza podwyższającego.
Przebiegi prądu i napięcia
V 0 (średnie napięcie wyjściowe) jest dodatnie, gdy przerywacz jest włączony i ujemne, gdy przerywacz jest wyłączony, jak pokazano na poniższym przebiegu.
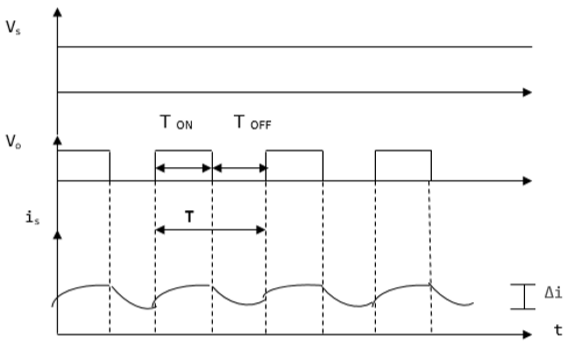
Gdzie
T ON - przedział czasu, w którym chopper jest włączony
T OFF - przedział czasu, w którym czopper jest wyłączony
V L - napięcie obciążenia
V s - napięcie źródła
T - Okres siekania = T ON + T OFF
V o jest określone przez -
$$V_{0}=\frac{1}{T}\int_{0}^{T_{ON}}V_{S}dt$$Gdy przerywacz (CH) jest włączony, następuje zwarcie obciążenia, a tym samym wyjście napięcia na okres TONwynosi zero. Ponadto cewka indukcyjna jest w tym czasie ładowana. To daje V S = V L
$L\frac{di}{dt}=V_{S},$ $\frac{\Delta i}{T_{ON}}=\frac{V_{S}}{L}$
W związku z tym,$\Delta i=\frac{V_{S}}{L}T_{ON}$
Δi = jest prądem szczytowym cewki indukcyjnej. Gdy przerywacz (CH) jest wyłączony, rozładowania następuje poprzez cewkę L. Zatem sumowanie V s i V L jest podawany w następujący sposób: -
$V_{0}=V_{S}+V_{L},\quad V_{L}=V_{0}-V_{S}$
Ale $L\frac{di}{dt}=V_{0}-V_{S}$
A zatem,$L\frac{\Delta i}{T_{OFF}}=V_{0}-V_{S}$
To daje,$\Delta i=\frac{V_{0}-V_{S}}{L}T_{OFF}$
Zrównanie Δi ze stanu włączenia do Δi ze stanu wyłączenia daje -
$\frac{V_{S}}{L}T_{ON}=\frac{V_{0}-V_{S}}{L}T_{OFF}$, $V_{S}\left ( T_{ON}+T_{OFF} \right )=V_{0}T_{OFF}$
$V_{0}=\frac{TV_{S}}{T_{OFF}}=\frac{V_{S}}{\frac{\left ( T+T_{ON} \right )}{T}}$
Daje to średnie napięcie wyjściowe jako,
$$V_{0}=\frac{V_{S}}{1-D}$$Z powyższego równania wynika, że V o można zmieniać od V S do nieskończoności. Dowodzi, że napięcie wyjściowe zawsze będzie większe niż napięcie wejściowe, a tym samym podnosi lub podnosi poziom napięcia.
Step Down Chopper
Jest to również znane jako konwerter złotówki. W tym przerywacza średnie napięcie wyjściowe V O jest mniejszy niż napięcie wejściowe V S . Gdy przerywacz jest włączony, V O = V S, a gdy przerywacz jest wyłączony, V O = 0
Gdy chopper jest włączony -
$V_{S}=\left ( V_{L}+V_{0} \right ),\quad V_{L}=V_{S}-V_{0},\quad L\frac{di}{dt}=V_{S}-V_{0},\quad L\frac{\Delta i}{T_{ON}}=V_{s}+V_{0}$
Zatem obciążenie prądem międzyszczytowym jest wyrażone wzorem,
$\Delta i=\frac{V_{s}-V_{0}}{L}T_{ON}$
Schemat obwodu
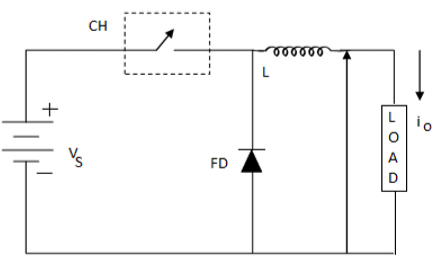
Gdzie FD to dioda wolnego koła.
Gdy przerywacz jest wyłączony, następuje odwrócenie polaryzacji i wyładowanie na cewce. Prąd przepływa przez diodę wolnego koła i cewkę do obciążenia. To daje,
$$L\frac{di}{dt}=V_{0}........................................\left ( i \right )$$Przepisano jako -$\quad L\frac{\Delta i}{T_{OFF}}=V_{0}$ $$\Delta i=V_{0}\frac{T_{OFF}}{L}...................................\left ( ii \right )$$
Równania zrównania (i) i (ii) dają;
$\frac{V_{S}-V_{0}}{L}T_{ON}=\frac{V_{0}}{L}T_{OFF}$
$\frac{V_{S}-V_{0}}{V_{0}}=\frac{T_{OFF}}{T_{ON}}$
$\frac{V_{S}}{V_{0}}=\frac{T_{ON}-T_{OFF}}{T_{ON}}$
Powyższe równanie daje;
$$V_{0}=\frac{T_{ON}}{T}V_{S}=DV_{S}$$Równanie (i) daje -
$\Delta i=\frac{V_{S}-DV_{S}}{L}DT$, od $D=\frac{T_{ON}}{T}$
$=\frac{V_{S}-\left ( 1-D \right )D}{Lf}$
$f=\frac{1}{T}=$częstotliwość siekania
Przebiegi prądu i napięcia
Przebiegi prądu i napięcia podano poniżej -
W przypadku przerywacza obniżającego napięcie wyjściowe jest zawsze mniejsze niż napięcie wejściowe. Pokazuje to poniższy przebieg.
Chopper w górę / w dół
Jest to również znane jako konwerter buck-boost. Umożliwia zwiększenie lub zmniejszenie poziomu wejściowego napięcia. Poniższy schemat przedstawia chopper buck-boost.
Gdy przerywacz jest włączony, cewka L zostaje naładowana przez źródło zasilania V s . W związku z tym, V y = v L .
$$L\frac{di}{dt}=V_{S}$$ $$\Delta i=\frac{V_{S}}{L}T_{ON}=\frac{V_{S}}{L}T\frac{T_{ON}}{T}=\frac{DV_{S}}{Lf}$$Ponieważ -
$D=\frac{T_{ON}}{T}$ i $f=\frac{1}{T} .............................................. \left ( iii \right )$
Kiedy przerywacz jest wyłączony, polaryzacja cewki zmienia się, co powoduje jej rozładowanie przez diodę i obciążenie.
W związku z tym,
$$V_{0}=-V_{L}$$ $$L\frac{di}{dt}=-V_{0}$$$L\frac{\Delta i}{T_{OFF}}=-V_{0}$, więc $\Delta i=-\frac{V_{0}}{L}T_{OFF}................................\left ( iv \right )$
Obliczanie równania (iii) i (iv) daje -
$\frac{DV_{S}}{Lf}=-\frac{V_{0}}{L}T_{OFF}$, $DV_{S}=-DV_{S}=-V_{0}T_{OFF}f$
$DV_{S}=-V_{0}\frac{T-T_{ON}}{T}=-V_{0}\left ( 1-\frac{T_{ON}}{T} \right )$, $V_{0}=-\frac{DV_{S}}{1-D}$
Dlatego $D=\frac{T_{ON}}{T}=\frac{T-T_{OFF}}{1-D}$
To daje,
$V_{0}=\frac{DV_{S}}{1-D}$
D może zmieniać się od 0 do 1. Kiedy, D = 0; V O = 0
Gdy D = 0,5, V O = V S
Kiedy D = 1, V O = ∞.
Stąd w przedziale 0 ≤ D ≤ 0,5 napięcie wyjściowe zmienia się w zakresie 0 ≤ V O <V S i otrzymujemy obniżanie lub operację Buck. Natomiast w przedziale 0,5 ≤ D ≤ 1 napięcie wyjściowe zmienia się w zakresie V S ≤ V O ≤ ∞ i uzyskujemy działanie podwyższające lub podwyższające.
W konwerterze istnieją dwie podstawowe metody sterowania służące do zmiany napięcia wyjściowego. To są -
- Kontrola stosunku czasu
- Kontrola ograniczenia prądu
Kontrola stosunku czasu
W sterowaniu stosunkiem czasu stała k dana przez $\frac{T_{ON}}{T}$Jest zróżnicowana. Stała k nazywana jest współczynnikiem wypełnienia. Kontrolę wskaźnika czasu można osiągnąć na dwa sposoby -
Stała częstotliwość
W tej metodzie sterowania częstotliwość (f = 1 / T 0N ) jest utrzymywana na stałym poziomie, podczas gdy zmienia się czas załączenia T. Nazywa się to modulacją szerokości impulsu (PWM).
Zmienna częstotliwość
W technice zmiennej częstotliwości częstotliwość (f = 1 / T) jest zmieniana, podczas gdy czas załączenia T jest utrzymywany na stałym poziomie. Nazywa się to sterowaniem modulacją częstotliwości.
Kontrola ograniczenia prądu
W konwerterze DC na DC wartość prądu zmienia się między maksymalnym a minimalnym poziomem napięcia ciągłego. W tej technice przerywacz (przełącznik w przetwornicy DC / DC) jest włączany, a następnie wyłączany, aby zapewnić utrzymanie prądu na stałym poziomie między górną i dolną granicą. Gdy prąd przekroczy punkt maksymalny, przerywacz wyłącza się.
Gdy przełącznik jest w stanie WYŁĄCZENIA, prąd płynie przez diodę i spada w sposób wykładniczy. Czoper jest włączany, gdy prąd osiągnie minimalny poziom. Metodę tę można stosować, gdy czas załączenia T jest stały lub gdy częstotliwość (f = 1 / T).
Przetworniki z przełącznikiem rezonansowym to konwertery z sieciami cewek indukcyjnych i kondensatorów (LC), których przebiegi prądu i napięcia zmieniają się w sposób sinusoidalny w każdym okresie przełączania. Istnieją różne rezonansowe konwertery przełączające -
- Rezonansowe konwertery DC na DC
- Falowniki DC na AC
- Rezonansowe falowniki AC na konwertery DC
W tym samouczku skupimy się na rezonansowych konwerterach DC na DC
Rezonansowe konwertery DC na DC
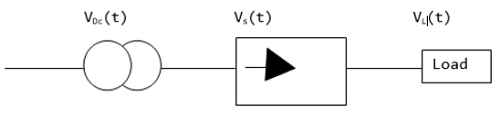
Koncepcja zasilacza impulsowego (SMPS) została wyjaśniona poniżej przy użyciu konwertera DC na DC. Obciążenie jest zasilane stałym napięciem (V OUT ), które jest uzyskiwane z podstawowego źródła zasilania V IN . Wartość V OUT jest regulowana przez rezystor zmienny szeregowo (R S ) lub źródło prądowe podłączone w boczniku ( I S ). Poprzez sterowanie V OUT poprzez zmianę I S i zapewnienie stałego R S , przetwornica traci znaczną ilość mocy.

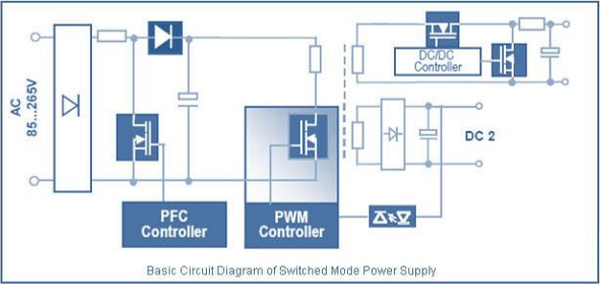
Zasilacz impulsowy (SMPS)
Zasilacz impulsowy (SMPS) odnosi się do urządzenia elektronicznego, które wykorzystuje regulator impulsowy w celu przetwarzania energii elektrycznej w efektywny sposób. SMPS pobiera energię z głównych linii energetycznych i przekazuje ją do obciążenia. Na przykład komputer zapewnia konwersję charakterystyk napięcia i prądu.
Różnica między zasilaczem SMPS a zasilaniem liniowym polega na tym, że ten pierwszy stale włącza się i wyłącza podczas niskiego rozpraszania i zużywa mniej czasu w obszarach o wysokim rozpraszaniu. Zapewnia to mniejsze marnowanie energii. W rzeczywistości SMPS nie rozprasza żadnej mocy.
Rozmiar SMPS jest mniejszy i bardzo lekki w porównaniu do normalnego liniowego urządzenia zasilającego o tym samym rozmiarze i kształcie.
Poniższy rysunek przedstawia schemat obwodu dla SMPS. Gdy zmienia się częstotliwość przełączania, zmagazynowana energia może się zmieniać dla każdego cyklu, a zatem zmienia się napięcie wyjściowe.
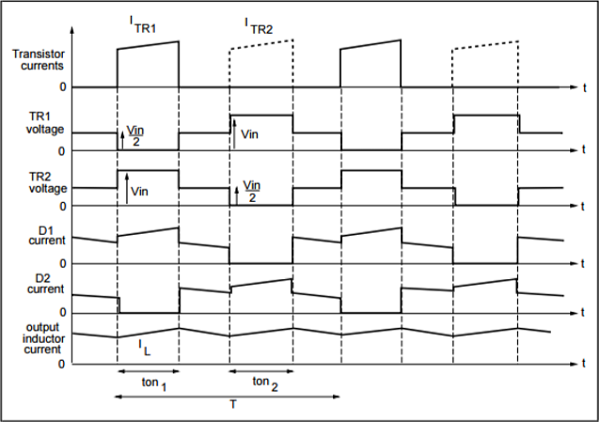
Poniższe przebiegi dotyczą konwertera półmostkowego, znanego również jako push-pull. Znajduje zastosowanie w aplikacjach wykorzystujących dużą moc. Napięcie wejściowe zmniejsza się o połowę, jak pokazano na przebiegu.
Chopper podwyższający ma napięcie wejściowe 150 V. Wymagane napięcie wyjściowe wynosi 450 V. Biorąc pod uwagę, że tyrystor ma czas przewodzenia 150 μsekund. Oblicz częstotliwość przerywania.
Solution −
The chopping frequency (f)
$f=\frac{1}{T}$
Gdzie T - Czas siekania = $T_{ON}+T_{OFF}$
Biorąc pod uwagę - $V_{S}=150V$$V_{0}=450V$ $T_{ON}=150\mu sec$
$V_{0}=V_{S\left ( \frac{T}{T-T_{ON}} \right )}$
$450=150\frac{T}{T-150^{-6}}$ $T=225\mu sec$
Dlatego $f=\frac{1}{225\ast 10^{-6}}=4.44KHz$
The new voltage output, on condition that the operation is at constant frequency after the halving the pulse width.
Zmniejszenie o połowę szerokości impulsu daje -
$$T_{ON}=\frac{150\times 10^{-6}}{2}=75\mu sec$$Częstotliwość jest więc stała,
$$f=4.44KHz$$ $$T=\frac{1}{f}=150\mu sec$$Wyjście napięciowe jest określone przez -
$$V_{0}=V_{S}\left ( \frac{T}{T-T_{ON}} \right )=150\times \left ( \frac{150\times 10^{-6}}{\left ( 150-75 \right )\times 10^{-6}} \right )=300Volts$$Inwerter odnosi się do energoelektronicznego urządzenia, które przekształca moc w postaci prądu stałego na prąd przemienny przy wymaganej częstotliwości i napięciu wyjściowym.
Falowniki są podzielone na dwie główne kategorie -
Voltage Source Inverter (VSI) - Falownik źródła napięcia ma sztywne napięcie źródła DC, to znaczy napięcie DC ma ograniczoną lub zerową impedancję na zaciskach wejściowych falownika.
Current Source Inverter (CSI)- Falownik źródła prądu jest zasilany zmiennym prądem ze źródła prądu stałego o wysokiej impedancji. Obciążenie nie wpływa na powstałe fale prądu.
Falownik jednofazowy
Istnieją dwa rodzaje falowników jednofazowych - falownik z pełnym mostkiem i falownik półmostkowy.
Falownik półmostkowy
Ten typ falownika jest podstawowym elementem konstrukcyjnym falownika z pełnym mostkiem. Zawiera dwa przełączniki, a każdy z jego kondensatorów ma napięcie wyjściowe równe$\frac{V_{dc}}{2}$. Dodatkowo przełączniki uzupełniają się wzajemnie, to znaczy jeśli jeden jest włączony, drugi gaśnie.
Falownik z pełnym mostkiem
Ten obwód falownika przekształca prąd stały na prąd przemienny. Osiąga to poprzez zamykanie i otwieranie przełączników w odpowiedniej kolejności. Ma cztery różne stany pracy, w zależności od tego, które przełączniki są zamknięte.
Falownik trójfazowy
Falownik trójfazowy przekształca wejście DC w trójfazowe wyjście AC. Jego trzy ramiona są zwykle opóźnione o kąt 120 °, aby generować trójfazowe zasilanie AC. Każdy z przełączników falownika ma stosunek 50%, a przełączanie następuje po każdym T / 6 czasu T (odstęp kątowy 60 °). Przełączniki S1 i S4, przełączniki S2 i S5 oraz przełączniki S3 i S6 uzupełniają się wzajemnie.
Poniższy rysunek przedstawia obwód falownika trójfazowego. To nic innego jak trzy falowniki jednofazowe umieszczone na tym samym źródle prądu stałego. Napięcia biegunów w falowniku trójfazowym są równe napięciom biegunów w jednofazowym falowniku półmostkowym.

Dwa powyższe typy falowników mają dwa tryby przewodzenia - 180° mode of conduction i 120° mode of conduction.
Tryb przewodzenia 180 °
W tym trybie przewodzenia każde urządzenie jest w stanie przewodzenia przez 180 °, gdzie jest włączane co 60 °. Zaciski A, B i C są zaciskami wyjściowymi mostka, które są podłączone do trójfazowego połączenia obciążenia w trójkąt lub gwiazdę.
Działanie symetrycznego obciążenia połączonego w gwiazdę jest wyjaśnione na poniższym schemacie. Dla okresu 0 ° - 60 ° punkty S1, S5 i S6 są w trybie przewodzenia. Zaciski A i C obciążenia są podłączone do źródła w jego dodatnim punkcie. Zacisk B jest podłączony do źródła w punkcie ujemnym. Ponadto rezystancje R / 2 znajdują się między punktem zerowym a dodatnim końcem, podczas gdy rezystancja R znajduje się między punktem neutralnym a ujemnym zaciskiem.
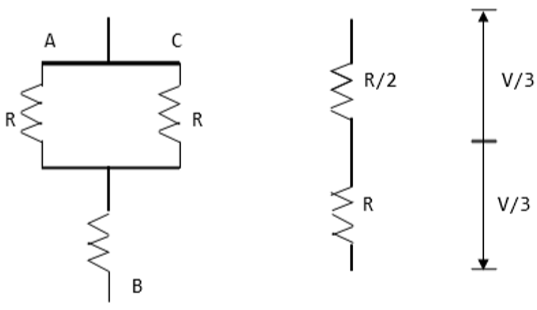
| Napięcia obciążenia są podane w następujący sposób; V AN = V / 3, V BN = −2V / 3, V CN = V / 3 |
Napięcia linii są podane w następujący sposób; V AB = V AN - V BN = V, V BC = V BN - V CN = −V, V CA = V CN - V AN = 0 |
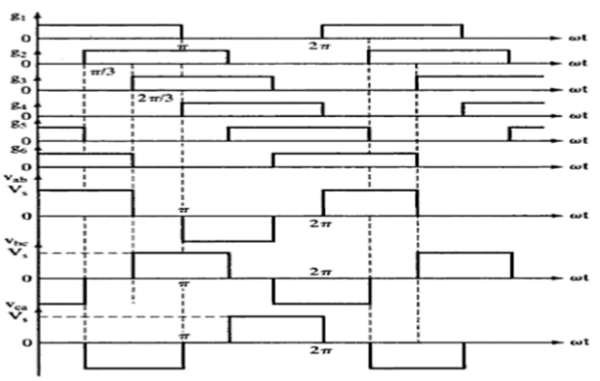
Przebiegi dla trybu przewodzenia 180 °
Tryb przewodzenia 120 °
W tym trybie przewodzenia każde urządzenie elektroniczne jest przewodzone przez 120 °. Jest najbardziej odpowiedni dla połączenia w trójkąt w obciążeniu, ponieważ daje w wyniku sześciostopniowy przebieg na dowolnej z jego faz. Dlatego w dowolnym momencie tylko dwa urządzenia przewodzą, ponieważ każde z nich przewodzi tylko pod kątem 120 °.
Zacisk A obciążenia jest podłączony do dodatniego końca, podczas gdy zacisk B jest podłączony do ujemnego końca źródła. Terminal C obciążenia jest w stanie zwanym stanem pływającym. Ponadto napięcia fazowe są równe napięciom obciążenia, jak pokazano poniżej.
Napięcia fazowe = napięcia sieciowe
V AB = V
V BC = -V / 2
V CA = -V / 2
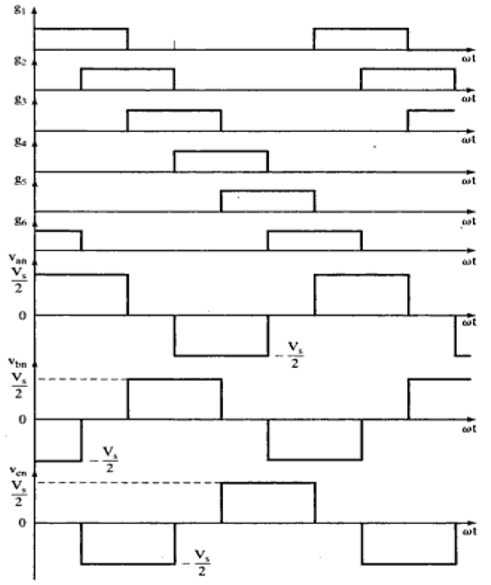
Przebiegi dla trybu przewodzenia 120 °
PWM to technika stosowana w celu zmniejszenia całkowitego zniekształcenia harmonicznego (THD) w prądzie obciążenia. Wykorzystuje falę impulsową w postaci prostokątnej / kwadratowej, która daje zmienną średnią wartość przebiegu f (t) po zmodulowaniu szerokości impulsu. Okres modulacji jest określony przez T. Dlatego też średnia wartość przebiegu jest podana przez
$$\bar{y}=\frac{1}{T}\int_{0}^{T}f\left ( t \right )dt$$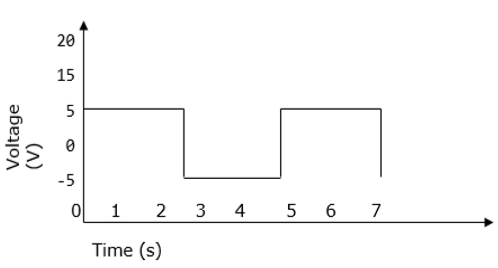
Sinusoidalna modulacja szerokości impulsu
W prostym falowniku źródła, przełączniki można włączać i wyłączać w razie potrzeby. Podczas każdego cyklu przełącznik jest włączany lub wyłączany raz. Daje to przebieg prostokątny. Jeśli jednak przełącznik jest kilkakrotnie włączany, uzyskuje się profil harmonicznych o ulepszonym przebiegu.
Sinusoidalny przebieg PWM uzyskuje się przez porównanie pożądanego przebiegu modulowanego z trójkątnym przebiegiem o wysokiej częstotliwości. Niezależnie od tego, czy napięcie sygnału jest mniejsze, czy większe niż napięcie fali nośnej, wynikowe napięcie wyjściowe szyny DC jest ujemne lub dodatnie.
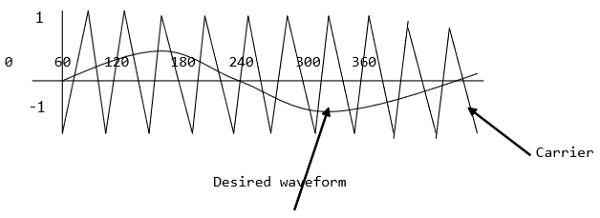
Amplituda sinusoidalna jest podana jako A m, a trójkąt nośny jako A c . W przypadku sinusoidalnego PWM współczynnik modulacji m jest określony przez A m / A c .
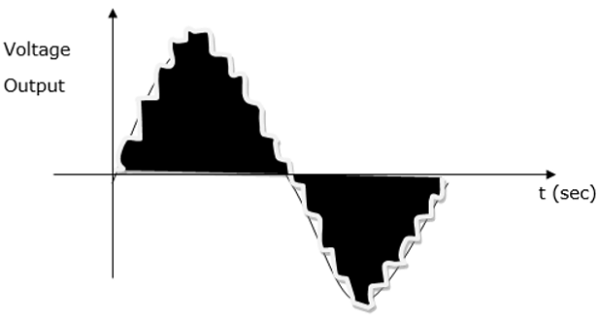
Zmodyfikowana sinusoidalna PWM
Zmodyfikowany sinusoidalny przebieg PWM jest używany do sterowania mocą i optymalizacji współczynnika mocy. Główną koncepcją jest przesunięcie prądu opóźnionego w sieci do sieci napięciowej poprzez modyfikację przetwornika PWM. W konsekwencji następuje poprawa sprawności energetycznej oraz optymalizacja współczynnika mocy.
Wiele PWM
Wielokrotne PWM ma wiele wyjść, które nie mają takiej samej wartości, ale okres czasu, w którym są wytwarzane, jest stały dla wszystkich wyjść. Falowniki z PWM mogą pracować przy wysokim napięciu wyjściowym.

Poniższy przebieg jest falą sinusoidalną wytwarzaną przez wielokrotne PWM
Kontrola napięcia i harmonicznych
Okresowy przebieg o częstotliwości, która jest wielokrotnością całki podstawowej mocy o częstotliwości 60 Hz, jest znany jako harmoniczna. Z drugiej strony, całkowite zniekształcenie harmoniczne (THD) odnosi się do całkowitego udziału wszystkich częstotliwości harmonicznych prądu.
Harmoniczne charakteryzowane są przez impuls, który reprezentuje liczbę prostowników używanych w danym obwodzie. Jest obliczany w następujący sposób -
$$h=\left ( n\times P \right )+1 \quad or \quad -1$$Gdzie n - jest liczbą całkowitą 1, 2, 3, 4… .n
P - Liczba prostowników
Podsumowano w poniższej tabeli -
Harmonic |
Frequency |
| 1 | 60 Hz |
| 2 nd | 120 Hz |
| 3 rd | 180 Hz |
| 4 th | 240 Hz |
| 5 . . 49-ty |
300 Hz . . 2940 Hz |
Harmoniczne mają wpływ na napięcie i prąd wyjściowy i można je zredukować za pomocą transformatorów separacyjnych, dławików sieciowych, przeprojektowania systemów zasilania i filtrów harmonicznych.
Szeregowy falownik rezonansowy
Falownik rezonansowy to falownik elektryczny, którego działanie opiera się na oscylacji prądu rezonansowego. Tutaj urządzenie przełączające i element rezonansowy są połączone szeregowo ze sobą. W wyniku naturalnych cech obwodu prąd przepływający przez urządzenie przełączające spada do zera.
Ten typ falownika generuje sinusoidalny przebieg przy bardzo wysokich częstotliwościach w zakresie 20kHz-100kHz. Dlatego jest najbardziej odpowiedni do zastosowań wymagających stałej mocy, takich jak ogrzewanie indukcyjne i oświetlenie fluorescencyjne. Zwykle jest mały, ponieważ jego częstotliwość przełączania jest wysoka.
Falownik rezonansowy ma wiele konfiguracji i dlatego jest podzielony na dwie grupy -
- Te z przełącznikami jednokierunkowymi
- Te z przełącznikami dwukierunkowymi
Falownik jednofazowy półmostkowy ma rezystancję 2,5 Ω i napięcie wejściowe DC 50 V. Oblicz następujące -
Solution -
a. The RMS voltage occurring at the fundamental frequency
$E_{1RMS}=0.9\times 50V=45V$
b. The power Output
Napięcie wyjściowe RMS $E_{ORMS}=E=50V$
Moc wyjściowa $=E^{2}/R=\left ( 50\right )^{2}/2.5=1000W$
c. Peak current and average current
Prąd szczytowy $I_{p}=E_{0}/R=50/2.5=20A$
Średni prąd$=I_{p}/2=20/2=10A$
d. Harmonic RMS voltage
$E_{n}=\left \{ \left ( E_{ORMS} \right )^{2}-\left ( E_{1RMS} \right )^{2} \right \}^{0.5}=\left [ 50^{2} -45^{2}\right ]^{0.5}=21.8V$
e. Total harmonic distortion
$E_{n}/E_{1RMS}=21.8/45=0.48\times 100\%=48\%$
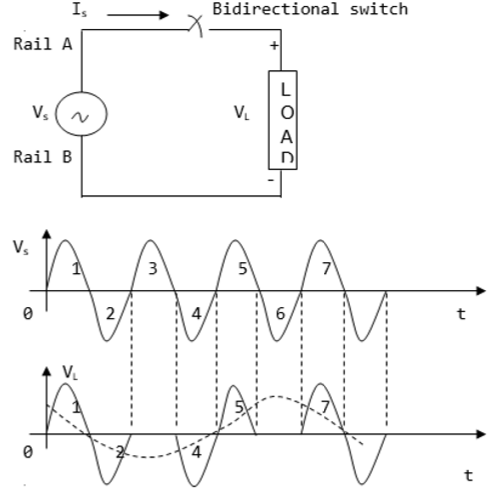
Jednofazowy regulator prądu przemiennego (regulator napięcia) służy do zmiany wartości napięcia przemiennego po podaniu go do obwodu obciążenia. Tyrystor jest również umieszczony między obciążeniem a stałym źródłem napięcia przemiennego.
Średni kwadrat napięcia przemiennego jest regulowany przez zmianę kąta wyzwalania tyrystora. W przypadku sterowania fazowego tyrystory są wykorzystywane jako przełączniki do ustanowienia połączenia od zasilania wejściowego AC do obwodu obciążenia podczas każdego cyklu wejściowego. Dla każdego dodatniego napięcia wejściowego występuje przerywanie i redukcja napięcia.
Schemat obwodu z obciążeniem rezystancyjnym
W połowie cyklu wyłącznik tyrystorowy jest włączany, aby umożliwić pojawienie się napięcia na obciążeniu. Po tym następuje stan OFF podczas ostatniej połowy cyklu, aby odłączyć obciążenie od napięcia źródła.
Podczas regulacji kąta wyzwalania α kontrolowana jest również wartość skuteczna napięcia na obciążeniu. Dlatego kąt wyzwalania α jest definiowany jako wartośćωt przy którym tyrystor włącza się.
Wielostopniowe sterowanie sekwencyjne konwertera AC
W przypadku podłączenia dwóch lub więcej stopni regulacji sekwencyjnej możliwa jest poprawa współczynnika mocy i dalsze zmniejszenie THD (całkowite zniekształcenie harmoniczne). Przekształtnik z regulacją sekwencji n-stopniowej ma n uzwojeń w części wtórnej transformatora o każdym znamionowym e s / n (napięcie źródła).
Kiedy dwa konwertery prądu przemiennego są umieszczone równolegle względem siebie, powstaje sposób sekwencji zerowej. Niewielka różnica między dwoma przetwornikami powoduje dużą sekwencję zerową w prądzie cyrkulacyjnym. Poniższy schemat przedstawia układ równoległy konwertera. Kierunek prądu jest przeciwny do ruchu wskazówek zegara w stosunku do układu napięciowego.
Cyklokonwerter odnosi się do przemiennika częstotliwości, który może zmieniać moc prądu przemiennego z jednej częstotliwości na prąd przemienny z inną częstotliwością. Ten proces jest znany jako konwersja AC-AC. Stosowany jest głównie w trakcji elektrycznej, silnikach prądu przemiennego o zmiennej prędkości i nagrzewaniu indukcyjnym.
Cyklokonwerter może osiągnąć konwersję częstotliwości w jednym etapie i zapewnia kontrolę napięcia i częstotliwości. Ponadto nie ma potrzeby stosowania obwodów komutacyjnych, ponieważ wykorzystuje on komutację naturalną. Przenoszenie mocy w cyklokonwerterze odbywa się w dwóch kierunkach (dwukierunkowo).
Głównym problemem związanym z cyklokonwerterami jest to, że gdy pracują przy małych prądach, występują nieefektywności wynikające z opóźnienia odpalania. Ponadto operacje są płynne tylko przy częstotliwościach, które nie są równe wartościom wejściowym połowy częstotliwości. Jest to prawdą, ponieważ cyklokonwerter to przetwornica AC-AC sterowana fazowo. Dlatego, aby zapewnić wymagane napięcie wyjściowe prądu przemiennego, musi dokonać wyboru segmentów wejściowych napięcia, stosując komutację liniową (naturalną). To wyjaśnia, dlaczego częstotliwość wyjściowa jest niższa niż częstotliwość wejściowa.
Na harmoniczne w cyklokonwerterze wpływają głównie metody sterowania, efekt nakładania się, liczba impulsów w danym cyklu, tryb pracy i sposób przewodzenia.
Istnieją dwa rodzaje cyklokonwerterów -
Step Up cycloconverter - Te typy wykorzystują naturalną komutację i dają sygnał wyjściowy przy wyższej częstotliwości niż częstotliwość wejściowa.
Step Down cycloconverter - Ten typ wykorzystuje wymuszoną komutację i skutkuje na wyjściu o częstotliwości mniejszej niż częstotliwość wejściowa.
Cyklokonwertery są dalej klasyfikowane w trzech kategoriach -
Single phase to single-phase- Ten typ cyklokonwertera ma dwa konwertery pełnookresowe podłączone tyłem do siebie. Jeśli jeden konwerter pracuje, drugi jest wyłączony, nie przepływa przez niego żaden prąd.
Three-phase to single-phase - Ten cyklokonwerter działa w czterech kwadrantach, czyli (+ V, + I) i (−V, −I) są trybami prostowania, a (+ V, −I) i (−V, + I) są trybami inwersji.
Three-phase to three-phase - Ten typ cyklokonwertera jest głównie stosowany w układach maszyn prądu przemiennego, które działają na trójfazowych maszynach indukcyjnych i maszynach synchronicznych.
Integralne sterowniki cykli to konwertery z możliwością bezpośredniego przełączania bez strat. Proces bezpośrednio przekształca prąd przemienny w prąd przemienny bez konieczności wykonywania procesów pośrednich z prądu przemiennego na prąd stały, a następnie z prądu stałego na prąd przemienny.
Podstawowy integralny cykl sterowania ma charakter sinusoidalny. Działa poprzez łączenie i eliminowanie półcyklów o wyższej częstotliwości z wejścia AC. Sterowniki są normalnie włączane lub wyłączane podczas półcyklów, w których napięcie wejściowe jest zerowe, ponieważ wykorzystywane są tylko pełne lub pół cykli. Dlatego obwody o cyklu integralnym osiągają przełączanie przy zerowym napięciu bez konieczności stosowania obwodu rezonansowego.
Poniższy schemat przedstawia prosty zintegrowany kontroler cyklu. Zawiera obciążenie i wyłącznik zasilania, który wykonuje bezpośrednią konwersję. Ten diagram pokazuje konwersję częstotliwości źródła z współczynnika trzech na jeden.
Kontrola współczynnika mocy
Regulacja współczynnika mocy, zwana również korektą współczynnika mocy, to proces zmniejszania ilości mocy biernej. Zastosowane w tym przypadku urządzenie energoelektroniczne nazywa się regulatorem współczynnika mocy (PFC). Od trójkąta mocy (który obejmuje moc bierną, rzeczywistą i pozorną), moc bierna jest ustawiona pod kątem prostym (90 °) do mocy rzeczywistej i służy do zasilania pola magnetycznego. Chociaż moc bierna nie ma rzeczywistej wartości w sprzęcie elektronicznym, rachunek za energię elektryczną obejmuje rzeczywiste i bierne koszty energii. Stąd konieczność stosowania regulatorów współczynnika mocy w urządzeniach elektronicznych.
Współczynnik mocy (k) definiuje się jako stosunek mocy czynnej (w kW) do mocy biernej (w kVAr). Jego wartość mieści się w zakresie od 0 do 1. Jeśli urządzenie ma współczynnik mocy 0,8 i więcej, mówi się, że zużywa energię efektywnie. Zastosowanie PFC zapewnia współczynnik mocy w zakresie od 0,95 do 0,99. Regulatory współczynnika mocy znajdują się głównie w urządzeniach przemysłowych, aby zminimalizować moc bierną generowaną przez oświetlenie fluorescencyjne i silniki elektryczne.
Aby zapewnić poprawę współczynnika mocy bez powodowania zniekształceń harmonicznych, nie należy używać konwencjonalnych kondensatorów. Zamiast tego stosowane są filtry (połączenie kondensatorów i dławików) do tłumienia harmonicznych. Poniższy rysunek przedstawia filtr harmonicznych.
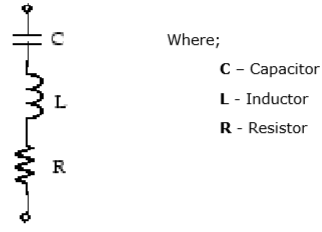
Powyższy typ filtra harmonicznych jest określany jako pojedynczy filtr dostrojony. Współczynnik jakości Q tego filtra jest definiowany jako współczynnik jakości jego reaktancji (X L ) przy Q (częstotliwość dostrajania), gdzie Q jest określone przez (nX L / R).
Konwerter macierzy definiuje się jako konwerter z pojedynczym etapem konwersji. Wykorzystuje dwukierunkowy przełącznik sterowany, aby uzyskać automatyczną konwersję mocy z AC na AC. Stanowi alternatywę dla prostownika napięcia PWM (dwustronny).
Przetwornice matrycowe charakteryzują się sinusoidalnymi przebiegami, które pokazują wejściowe i wyjściowe częstotliwości przełączania. Dwukierunkowe przełączniki umożliwiają sterowanie wejściowym współczynnikiem mocy. Ponadto brak łączy DC zapewnia kompaktową konstrukcję. Wadą konwerterów matrycowych jest brak dwustronnych przełączników, które są w pełni kontrolowane i mogą pracować na wysokich częstotliwościach. Jego stosunek napięcia wyjściowego do napięcia wejściowego jest ograniczony.
Istnieją trzy metody sterowania konwerterem macierzy -
- Modulacja wektora przestrzeni
- Modulacja szerokości impulsów
- Venturi - analiza transferu funkcji
Obwód przetwornika macierzy
Poniższy schemat przedstawia jednofazowy przetwornik matrycowy.

Zawiera cztery przełączniki dwukierunkowe, z których każdy może przewodzić zarówno napięcie blokujące w kierunku przewodzenia, jak i napięcie wsteczne.
Modulacja wektora przestrzeni (SVM)
SVM odnosi się do metody algorytmu używanej do sterowania PWM. Tworzy przebiegi prądu przemiennego, które napędzają silniki prądu przemiennego z różnymi prędkościami. W przypadku falownika trójfazowego zasilanego prądem stałym, jego trzy główne nogi na wyjściu są połączone z silnikiem trójfazowym.
Przełączniki są pod kontrolą, aby zapewnić, że żadne dwa przełączniki w tej samej nodze nie są włączone w tym samym czasie. Jednoczesne stany ON mogą spowodować zwarcie zasilania DC. Prowadzi to do ośmiu wektorów przełączających, w których dwa to zero, a sześć to aktywne wektory do przełączania.
Jednofazowy przetwornik napięcia AC ma następujące szczegóły -
Czas włączenia = 6 min, czas wyłączenia = 4 min, częstotliwość = 50 Hz i
Źródło napięcia V o = 110V
Oblicz następujące.
Kąt wyzwalania α
Solution -
$T=2\times \left ( T_{ON}+T_{OFF} \right )$ ale $f=50Hz,$ $T=2\times \left ( 6+4 \right )=20mins$
$360^{\circ}=20min,$ $1min=18^{\circ}$
W związku z tym, $T_{OFF}=4min$
Następnie,
$$\alpha =\frac{4}{0.1}\times 1.8=72^{\circ}$$Wyjście napięciowe
Solution -
$$V_{0}=\left ( V_{S}\times D \right ),\quad where \quad D=\frac{T_{ON}}{T_{ON}+T_{OFF}}=\frac{6}{10}=0.6$$ $$T_{ON}=6min,\quad T_{OFF}=4 min,\quad V_{S}=110V$$ $$V_{0}\left ( Voltage Output \right )=V_{S}\times D=110\times 0.6=66Volts$$