Arduino - Interface Periférica Serial
Um barramento de interface periférica serial (SPI) é um sistema para comunicação serial, que usa até quatro condutores, geralmente três. Um condutor é usado para receber dados, um para enviar dados, um para sincronização e um alternativamente para selecionar um dispositivo com o qual se comunicar. É uma conexão full duplex, o que significa que os dados são enviados e recebidos simultaneamente. A taxa de transmissão máxima é maior do que no sistema de comunicação I2C.
Pinos SPI da placa
SPI usa os seguintes quatro fios -
SCK - Este é o relógio serial acionado pelo mestre.
MOSI - Esta é a saída mestre / entrada escrava controlada pelo mestre.
MISO - Esta é a entrada mestre / saída escrava conduzida pelo mestre.
SS - Este é o fio de seleção do escravo.
As seguintes funções são usadas. Você tem que incluir o SPI.h.
SPI.begin() - Inicializa o barramento SPI configurando SCK, MOSI e SS para as saídas, puxando SCK e MOSI para baixo e SS para alto.
SPI.setClockDivider(divider)- Para definir o divisor de relógio SPI em relação ao relógio do sistema. Em placas baseadas em AVR, os divisores disponíveis são 2, 4, 8, 16, 32, 64 ou 128. A configuração padrão é SPI_CLOCK_DIV4, que define o relógio SPI para um quarto da frequência do relógio do sistema (5 Mhz para placas a 20 MHz).
Divider - Pode ser (SPI_CLOCK_DIV2, SPI_CLOCK_DIV4, SPI_CLOCK_DIV8, SPI_CLOCK_DIV16, SPI_CLOCK_DIV32, SPI_CLOCK_DIV64, SPI_CLOCK_DIV128).
SPI.transfer(val) - A transferência SPI é baseada em um envio e recebimento simultâneos: os dados recebidos são retornados em receivedVal.
SPI.beginTransaction(SPISettings(speedMaximum, dataOrder, dataMode)) - speedMaximum é o relógio, dataOrder (MSBFIRST ou LSBFIRST), dataMode (SPI_MODE0, SPI_MODE1, SPI_MODE2 ou SPI_MODE3).
Temos quatro modos de operação no SPI como segue -
Mode 0 (the default) - O relógio é normalmente baixo (CPOL = 0) e os dados são amostrados na transição de baixo para alto (borda de ataque) (CPHA = 0).
Mode 1 - O relógio é normalmente baixo (CPOL = 0) e os dados são amostrados na transição de alto para baixo (borda de fuga) (CPHA = 1).
Mode 2 - O clock é normalmente alto (CPOL = 1) e os dados são amostrados na transição de alto para baixo (borda de ataque) (CPHA = 0).
Mode 3 - O clock é normalmente alto (CPOL = 1) e os dados são amostrados na transição de baixo para alto (borda de fuga) (CPHA = 1).
SPI.attachInterrupt(handler) - Função a ser chamada quando um dispositivo escravo recebe dados do mestre.
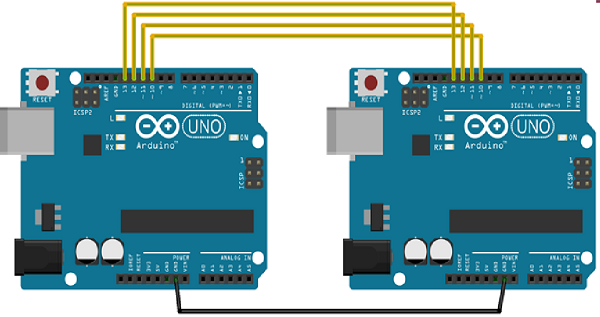
Agora, conectaremos duas placas Arduino UNO; um como mestre e o outro como escravo.
- (SS): pino 10
- (MOSI): pino 11
- (MISO): pino 12
- (SCK): pino 13
O terreno é comum. A seguir está a representação esquemática da conexão entre as duas placas -
Vejamos exemplos de SPI como Master e SPI como Slave.
SPI como MASTER
Exemplo
#include <SPI.h>
void setup (void) {
Serial.begin(115200); //set baud rate to 115200 for usart
digitalWrite(SS, HIGH); // disable Slave Select
SPI.begin ();
SPI.setClockDivider(SPI_CLOCK_DIV8);//divide the clock by 8
}
void loop (void) {
char c;
digitalWrite(SS, LOW); // enable Slave Select
// send test string
for (const char * p = "Hello, world!\r" ; c = *p; p++) {
SPI.transfer (c);
Serial.print(c);
}
digitalWrite(SS, HIGH); // disable Slave Select
delay(2000);
}SPI como SLAVE
Exemplo
#include <SPI.h>
char buff [50];
volatile byte indx;
volatile boolean process;
void setup (void) {
Serial.begin (115200);
pinMode(MISO, OUTPUT); // have to send on master in so it set as output
SPCR |= _BV(SPE); // turn on SPI in slave mode
indx = 0; // buffer empty
process = false;
SPI.attachInterrupt(); // turn on interrupt
}
ISR (SPI_STC_vect) // SPI interrupt routine {
byte c = SPDR; // read byte from SPI Data Register
if (indx < sizeof buff) {
buff [indx++] = c; // save data in the next index in the array buff
if (c == '\r') //check for the end of the word
process = true;
}
}
void loop (void) {
if (process) {
process = false; //reset the process
Serial.println (buff); //print the array on serial monitor
indx= 0; //reset button to zero
}
}