Sistemas de radar - Guia rápido
RADAR é um sistema de detecção de base eletromagnética que funciona irradiando ondas eletromagnéticas e estudando o eco ou as ondas de retorno refletidas.
A forma completa de RADAR é RAdio Detecção And Ranging. A detecção se refere à presença ou não do alvo. O alvo pode ser estacionário ou móvel, ou seja, não estacionário. O alcance refere-se à distância entre o radar e o alvo.
Os radares podem ser usados para várias aplicações em terra, no mar e no espaço. oapplications de radares estão listados abaixo.
- Controle do tráfego aéreo
- Segurança do navio
- Sentindo os lugares remotos
- Aplicações militares
Em qualquer aplicação do Radar, o princípio básico permanece o mesmo. Vamos agora discutir o princípio do radar.
Princípio Básico do Radar
O radar é usado para detectar os objetos e encontrar sua localização. Podemos entender obasic principle do radar da figura a seguir.

Conforme mostrado na figura, o radar consiste principalmente em um transmissor e um receptor. Ele usa a mesma antena para transmitir e receber os sinais. A função dotransmitter é transmitir o sinal do radar na direção do alvo presente.
O alvo reflete este sinal recebido em várias direções. O sinal, que é refletido de volta para a antena, é recebido peloreceiver.
Terminologia de Sistemas de Radar
A seguir estão os termos básicos, que são úteis neste tutorial.
- Range
- Frequência de Repetição de Pulso
- Alcance Máximo Não Ambíguo
- Alcance Mínimo
Agora, vamos discutir sobre esses termos básicos um por um.
Alcance
A distância entre o radar e o alvo é chamada Range do alvo ou simplesmente alcance, R. Sabemos que o Radar transmite um sinal para o alvo e, portanto, o alvo envia um sinal de eco para o radar com a velocidade da luz, C.
Deixe o tempo que leva para o sinal viajar do radar ao alvo e de volta ao radar seja 'T'. A distância bidirecional entre o radar e o alvo será 2R, uma vez que a distância entre o radar e o alvo é R.
Agora, a seguir está a fórmula para Speed.
$$Speed= \frac{Distance}{Time}$$
$$\Rightarrow Distance=Speed\times Time$$
$$\Rightarrow 2R=C\times T$$
$$R=\frac{CT}{2}\:\:\:\:\:Equation\:1$$
Podemos encontrar o range of the target substituindo os valores de C & T na Equação 1.
Frequência de Repetição de Pulso
Os sinais de radar devem ser transmitidos a cada pulso de clock. A duração entre os dois pulsos do relógio deve ser escolhida apropriadamente de tal forma que o sinal de eco correspondente ao pulso do relógio atual seja recebido antes do próximo pulso do relógio. Um típicoRadar wave form é mostrado na figura a seguir.

Conforme mostrado na figura, o radar transmite um sinal periódico. Tem uma série de pulsos estreitos e retangulares. O intervalo de tempo entre os pulsos de relógio sucessivos é chamadopulse repetition time, $T_P$.
O recíproco do tempo de repetição do pulso é chamado pulse repetition frequency, $f_P$. Matematicamente, pode ser representado como
$$f_P=\frac{1}{T_P}\:\:\:\:\:Equation\:2$$Portanto, a frequência de repetição do pulso nada mais é do que a frequência na qual o Radar transmite o sinal.
Alcance Máximo Não Ambíguo
Sabemos que os sinais de radar devem ser transmitidos a cada pulso de clock. Se selecionarmos uma duração mais curta entre os dois pulsos de clock, o sinal de eco correspondente ao pulso de clock presente será recebido após o próximo pulso de clock. Devido a isso, o alcance do alvo parece ser menor do que o alcance real.
Portanto, temos que selecionar a duração entre os dois pulsos de clock de forma que o sinal de eco correspondente ao pulso de clock atual seja recebido antes que o próximo pulso de clock comece. Em seguida, obteremos o verdadeiro alcance do alvo e também é chamado de alcance máximo inequívoco do alvo ou simplesmente,maximum unambiguous range.
Substituto, $R=R_{un}$ e $T=T_P$ na Equação 1.
$$R_{un}=\frac{CT_P}{2}\:\:\:\:\:Equation\:3$$
Da Equação 2, obteremos o tempo de repetição do pulso, $T_P$ como o recíproco da frequência de repetição de pulso, $f_P$. Mathematically, pode ser representado como
$$T_P=\frac{1}{f_P}\:\:\:\:\:Equation\:4$$
Substitua, Equação 4 na Equação 3.
$$R_{un}=\frac{C\left ( \frac{1}{f_P} \right )}{2}$$
$$R_{un}=\frac{C}{2f_P}\:\:\:\:\:Equation\:5$$
Podemos usar a Equação 3 ou a Equação 5 para calcular o intervalo não ambíguo máximo do alvo.
Obteremos o valor do intervalo não ambíguo máximo do alvo, $R_{un}$ substituindo os valores de $C$ e $T_P$ na Equação 3.
Da mesma forma, obteremos o valor do intervalo não ambíguo máximo do alvo, $R_{un}$ substituindo os valores de $C$ e $f_P$ na Equação 5.
Alcance Mínimo
Vamos pegar o minimum rangedo alvo, quando consideramos o tempo necessário para o sinal de eco receber no radar após o sinal sendo transmitido do radar como largura de pulso. Também é chamado de alcance mais curto do alvo.
Substituto, $R=R_{min}$ e $T=\tau$ na Equação 1.
$$R_{min}=\frac{C\tau}{2}\:\:\:\:\:Equation\:6$$
Obteremos o valor do intervalo mínimo do alvo, $R_{min}$ substituindo os valores de $C$ e $\tau$ na Equação 6.
A equação do alcance do radar é útil para saber o alcance do alvo theoretically. Neste capítulo, discutiremos a forma padrão da equação de alcance do radar e, em seguida, discutiremos sobre as duas formas modificadas da equação de alcance do radar.
Obteremos essas formas modificadas da equação de alcance do radar a partir da forma padrão da equação de alcance do radar. Agora, vamos discutir sobre a derivação da forma padrão da equação de alcance do radar.
Derivação da Equação de Alcance do Radar
A forma padrão da equação de alcance do radar também é chamada de forma simples de equação de alcance do radar. Agora, vamos derivar a forma padrão da equação de alcance do radar.
Nós sabemos isso power densitynada mais é do que a relação entre potência e área. Então, a densidade de potência,$P_{di}$ à distância, R do radar pode ser matematicamente representado como -
$$P_{di}=\frac{P_t}{4\pi R^2}\:\:\:\:\:Equation\:1$$
Onde,
$P_t$A densidade de potência acima é válida para uma antena isotrópica. Em geral, os radares usam antenas direcionais. Portanto, a densidade de potência,$P_{dd}$ devido à antena direcional será -
$$P_{dd}=\frac{P_tG}{4\pi R^2}\:\:\:\:\:Equation\:2$$
O alvo irradia a potência em diferentes direções da potência de entrada recebida. A quantidade de energia refletida de volta para o radar depende de sua seção transversal. Então, a densidade de potência$P_{de}$ de sinal de eco no radar pode ser matematicamente representado como -
$$P_{de}=P_{dd}\left (\frac{\sigma}{4\pi R^2}\right )\:\:\:\:\:Equation\:3$$ Substitua, Equação 2 na Equação 3.
$$P_{de}=\left (\frac{P_tG}{4\pi R^2}\right )\left (\frac{\sigma}{4\pi R^2}\right )\:\:\:\:\:Equation\:4$$
A quantidade de power, $P_r$ received pelo radar depende da abertura efetiva, $A_e$ da antena receptora.
$$P_r=P_{de}A_e\:\:\:\:\:Equation\:5$$
Substitua, Equação 4 na Equação 5.
$$P_r=\left (\frac{P_tG}{4\pi R^2}\right )\left (\frac{\sigma}{4\pi R^2}\right )A_e$$
$$\Rightarrow P_r=\frac{P_tG\sigma A_e}{\left (4\pi\right )^2 R^4}$$
$$\Rightarrow R^4=\frac{P_tG\sigma A_e}{\left (4\pi\right )^2 P_r}$$
$$\Rightarrow R=\left [\frac{P_tG\sigma A_e}{\left (4\pi\right )^2 P_r}\right ]^{1/4}\:\:\:\:\:Equation\:6$$
Forma padrão da equação de alcance do radar
Se o sinal de eco tiver uma potência menor do que a potência do sinal mínimo detectável, o radar não poderá detectar o alvo, pois está além do limite máximo do alcance do radar.
Portanto, podemos dizer que a faixa do alvo é dita faixa máxima quando o sinal de eco recebido está tendo a potência igual à do sinal mínimo detectável. Obteremos a seguinte equação, substituindo$R=R_{Max}$ e $P_r=S_{min}$ na Equação 6.
$$R_{Max}=\left [\frac{P_tG\sigma A_e}{\left (4\pi\right )^2 S_{min}}\right ]^{1/4}\:\:\:\:\:Equation\:7$$
Equação 7 representa o standard formda equação de alcance do radar. Usando a equação acima, podemos encontrar o intervalo máximo do alvo.
Formas modificadas de equação de alcance do radar
Conhecemos a seguinte relação entre o ganho da antena direcional, $G$ e abertura efetiva, $A_e$.
$$G=\frac{4\pi A_e}{\lambda^2}\:\:\:\:\:Equation\:8$$
Substitua, Equação 8 na Equação 7.
$$R_{Max}=\left [ \frac{P_t\sigma A_e}{\left ( 4\pi \right )^2S_{min}}\left ( \frac{4\pi A_e}{\lambda^2} \right ) \right ]^{1/4}$$
$$\Rightarrow R_{Max}=\left [\frac{P_tG\sigma {A_e}^2}{4\pi \lambda^2 S_{min}}\right ]^{1/4}\:\:\:\:\:Equation\:9$$
Equação 9 representa o modified formda equação de alcance do radar. Usando a equação acima, podemos encontrar o intervalo máximo do alvo.
Obteremos a seguinte relação entre a abertura efetiva, $A_e$ e o ganho de antena direcional, $G$ da Equação 8.
$$A_e=\frac{G\lambda^2}{4\pi}\:\:\:\:\:Equation\:10$$
Substitua, Equação 10 na Equação 7.
$$R_{Max}=\left [\frac{P_tG\sigma}{\left (4\pi\right )^2 S_{min}}(\frac{G\lambda^2}{4\pi})\right ]^{1/4}$$
$$\Rightarrow R_{Max}=\left [\frac{P_tG^2 \lambda^2 \sigma}{\left (4\pi\right )^2 S_{min}}\right ]^{1/4}\:\:\:\:\:Equation\:11$$
Equação 11 representa another modified form da equação de alcance do radar. Usando a equação acima, podemos encontrar o intervalo máximo do alvo.
Note - Com base nos dados fornecidos, podemos encontrar o intervalo máximo do alvo usando uma dessas três equações, a saber
- Equação 7
- Equação 9
- Equação 11
Problemas de exemplo
Na seção anterior, obtivemos as formas padrão e modificadas da equação de alcance do radar. Agora, vamos resolver alguns problemas usando essas equações.
Problema 1
Calcule o maximum range of Radar para as seguintes especificações -
- Potência de pico transmitida pelo radar, $P_t=250KW$
- Ganho de transmissão de antena, $G=4000$
- Abertura efetiva da antena receptora, $A_e=4\:m^2$
- Seção transversal do radar do alvo, $\sigma=25\:m^2$
- Potência do sinal mínimo detectável, $S_{min}=10^{-12}W$
Solução
Podemos usar o seguinte standard form da equação do alcance do radar para calcular o alcance máximo do radar para determinadas especificações.
$$R_{Max}=\left [\frac{P_tG \sigma A_e}{\left (4\pi \right )^2 S_{min}}\right ]^{1/4}$$
Substitute todos os parâmetros fornecidos na equação acima.
$$R_{Max}=\left [\frac{ \left ( 250\times 10^3 \right )\left ( 4000 \right )\left ( 25 \right )\left ( 4 \right )}{\left ( 4\pi \right )^2 \left ( 10^{-12} \right )} \right ]^{1/4}$$
$$\Rightarrow R_{Max}=158\:KM$$
Portanto, o maximum range of Radar para determinadas especificações é $158\:KM$.
Problema 2
Calcule o maximum range of Radar para as especificações a seguir.
- Frequência de operação, $f=10GHZ$
- Potência de pico transmitida pelo radar, $P_t=400KW$
- Abertura efetiva da antena receptora, $A_e=5\:m^2$
- Seção transversal do radar do alvo, $\sigma=30\:m^2$
- Potência do sinal mínimo detectável, $S_{min}=10^{-10}W$
Solução
Nós conhecemos a seguinte fórmula para operating wavelength, $\lambda$ em termos de freqüência de operação, f.
$$\lambda =\frac{C}{f}$$
Substituto, $C=3\times 10^8m/sec$ e $f=10GHZ$ na equação acima.
$$\lambda =\frac{3\times 10^8}{10\times 10^9}$$
$$\Rightarrow \lambda=0.03m$$
Então o operating wavelength,$\lambda$ é igual a $0.03m$, quando a frequência operacional, $f$ é $10GHZ$.
Podemos usar o seguinte modified form da equação do alcance do radar para calcular o alcance máximo do radar para determinadas especificações.
$$R_{Max}=\left [\frac{P_t \sigma {A_e}^2}{4\pi \lambda^2 S_{min}}\right ]^{1/4}$$
Substitute, os parâmetros fornecidos na equação acima.
$$R_{Max}=\left [ \frac{\left ( 400\times 10^3 \right )\left ( 30 \right )\left ( 5^2 \right )}{4\pi\left ( 0.003 \right )^2\left ( 10 \right )^{-10}} \right ]^{1/4}$$
$$\Rightarrow R_{Max}=128KM$$
Portanto, o maximum range of Radar para determinadas especificações é $128\:KM$.
Os fatores que afetam o desempenho do radar são conhecidos como fatores de desempenho do radar. Neste capítulo, vamos discutir sobre esses fatores. Nós sabemos que o seguintestandard form da equação de alcance do radar, que é útil para calcular o alcance máximo do radar para determinadas especificações.
$$R_{Max}=\left [\frac{P_tG\sigma A_e}{\left (4\pi\right )^2 S_{min}}\right ]^{1/4}$$
Onde,
$P_t$ é o pico de potência transmitido pelo radar
$G$ é o ganho de transmitir Antena
$\sigma$ é a seção transversal do radar do alvo
$A_e$ é a abertura efetiva da antena receptora
$S_{min}$ é a potência do sinal mínimo detectável
A partir da equação acima, podemos concluir que o seguinte conditions deve ser considerado para obter o alcance do radar o máximo.
- Potência de pico transmitida pelo radar $P_t$ deve ser alto.
- Ganho da antena transmissora $G$ deve ser alto.
- Seção transversal do radar do alvo $\sigma$ deve ser alto.
- Abertura efetiva da antena receptora $A_e$ deve ser alto.
- Potência do sinal mínimo detectável $S_{min}$ deve ser baixo.
É difícil prever o alcance do alvo a partir da forma padrão da equação de alcance do radar. Isso significa que o grau de precisão fornecido pela equação de alcance do radar sobre o alcance do alvo é menor. Porque os parâmetros como a seção transversal do radar do alvo,$\sigma$ e sinal mínimo detectável, $S_{min}$ está statistical in nature.
Sinal Mínimo Detectável
Se o sinal de eco tiver potência mínima, a detecção desse sinal pelo radar é conhecida como minimum detectable signal. Isso significa que o radar não pode detectar o sinal de eco se esse sinal tiver menos potência do que a potência mínima.
Em geral, o Radar recebe o sinal de eco além do ruído. Se o valor do limite for usado para detectar a presença do alvo a partir do sinal recebido, essa detecção é chamadathreshold detection.
Temos que selecionar o valor de limite adequado com base na força do sinal a ser detectado.
Um valor de limite alto deve ser escolhido quando a intensidade do sinal a ser detectado é alta, de modo que elimine o sinal de ruído indesejado presente nele.
Da mesma forma, um valor de limite baixo deve ser escolhido quando a intensidade do sinal a ser detectado é baixa.
Os seguintes figure ilustra este conceito -

UMA typical waveformdo receptor do radar é mostrado na figura acima. Os eixos xey representam o tempo e a tensão, respectivamente. O valor rms do ruído e o valor limite são indicados com linhas pontilhadas na figura acima.
Consideramos três pontos, A, B e C na figura acima para identificar as detecções válidas e as detecções ausentes.
O valor do sinal no ponto A é maior do que o valor limite. Portanto, é umvalid detection.
O valor do sinal no ponto B é igual ao valor limite. Portanto, é umvalid detection.
Mesmo que o valor do sinal no ponto C esteja mais próximo do valor limite, é um missing detection. Porque, o valor do sinal no ponto C é menor que o valor limite.
Portanto, os pontos, A e B são detecções válidas. Considerando que, o ponto C é uma detecção ausente.
Ruído do receptor
Se o receptor gerar um componente de ruído no sinal, que é recebido no receptor, esse tipo de ruído é conhecido como ruído do receptor. oreceiver noiseé um componente indesejado; devemos tentar eliminá-lo com algumas precauções.
No entanto, existe um tipo de ruído que é conhecido como ruído térmico. Isso ocorre devido ao movimento térmico dos elétrons de condução. Matematicamente, podemos escreverthermal noise power, $N_i$ produzido no receptor como -
$$N_i=KT_oB_n$$
Onde,
$K$ é a constante de Boltzmann e é igual a $1.38\times 10^{-23}J/deg$
$T_o$ é a temperatura absoluta e é igual a $290^0K$
$B_n$ é a largura de banda do receptor
Figura de mérito
o Figure of Merit, F nada mais é do que a relação de SNR de entrada, $(SNR)_i$ e saída SNR, $(SNR)_o$. Matematicamente, pode ser representado como -
$$F=\frac{(SNR)_i}{(SNR)_o}$$
$$\Rightarrow F=\frac{S_i/N_i}{S_o/N_o}$$
$$\Rightarrow F=\frac{N_oS_i}{N_iS_o}$$
$$\Rightarrow S_i=\frac{FN_iS_o}{N_o}$$
Substituto, $N_i=KT_oB_n$ na equação acima.
$$\Rightarrow S_i=FKT_oB_n\left ( \frac{S_o}{N_o}\right )$$
A potência do sinal de entrada terá o valor mínimo, quando o SNR da saída estiver com o valor mínimo.
$$\Rightarrow S_{min}=FKT_oB_n\left ( \frac{S_o}{N_o}\right )_{min}$$
Substituto, o acima $S_{min}$ na seguinte forma padrão da equação de alcance do radar.
$$R_{Max}=\left [\frac{P_tG\sigma A_e}{\left (4\pi\right )^2 S_{min}}\right ]^{1/4}$$
$$\Rightarrow R_{Max}=\left [\frac{P_tG\sigma A_e}{\left (4\pi\right )^2 FKT_oB_n\left ( \frac{S_o}{N_o}\right )_{min}}\right ]^{1/4}$$
A partir da equação acima, podemos concluir que o seguinte conditions deve ser considerado para obter o alcance do radar o máximo.
- Potência de pico transmitida pelo radar, $P_t$ deve ser alto.
- Ganho da antena transmissora $G$ deve ser alto.
- Seção transversal do radar do alvo $\sigma$ deve ser alto.
- Abertura efetiva da antena receptora $A_e$ deve ser alto.
- Figura de mérito F deve ser baixa.
- Largura de banda do receptor $B_n$ deve ser baixo.
Neste capítulo, discutiremos brevemente os diferentes tipos de radar. Este capítulo fornece informações resumidas sobre os tipos de radares. Os radares podem ser classificados nas seguintestwo types com base no tipo de sinal com o qual o radar pode ser operado.
- Radar de pulso
- Radar de onda contínua
Agora, vamos discutir sobre esses dois tipos de radar, um por um.
Radar de pulso
O Radar, que opera com sinal de pulso é chamado de Pulse Radar. Os radares de pulso podem ser classificados nos dois tipos a seguir, com base no tipo de alvo que detecta.
- Radar de pulso básico
- Radar de indicação de alvo móvel
Vamos agora discutir os dois radares brevemente.
Radar de pulso básico
O Radar, que opera com sinal de pulso para detecção de alvos estacionários, é chamado de Basic Pulse Radarou simplesmente, Radar de pulso. Ele usa uma única antena para transmitir e receber sinais com a ajuda do Duplexer.
A antena irá transmitir um sinal de pulso a cada pulso do clock. A duração entre os dois pulsos do relógio deve ser escolhida de tal forma que o sinal de eco correspondente ao pulso do relógio atual seja recebido antes do próximo pulso do relógio.
Radar de indicação de alvo móvel
O Radar, que opera com sinal de pulso para detecção de alvos não estacionários, é denominado Radar de Indicação de Alvo Móvel ou simplesmente, MTI Radar. Ele usa uma única antena para transmissão e recepção de sinais com a ajuda do Duplexer.
O radar MTI usa o princípio de Doppler effect para distinguir os alvos não estacionários de objetos estacionários.
Radar de onda contínua
O Radar, que opera com sinal contínuo ou onda é denominado Continuous Wave Radar. Eles usam o efeito Doppler para detectar alvos não estacionários. Os radares de onda contínua podem ser classificados nos dois tipos a seguir.
- Radar de onda contínua não modulada
- Radar de onda contínua modulada por frequência
Agora, vamos discutir os dois radares brevemente.
Radar de onda contínua não modulada
O Radar, que opera com sinal contínuo (onda) para detecção de alvos não estacionários é denominado Radar de Onda Contínua Não Modulada ou simplesmente, CW Radar. É também chamado de CW Doppler Radar.
Este radar requer duas antenas. Destas duas antenas, uma antena é usada para transmitir o sinal e a outra antena é usada para receber o sinal. Ele mede apenas a velocidade do alvo, mas não a distância do alvo ao radar.
Radar de onda contínua modulada por frequência
Se o radar Doppler CW usa a modulação em frequência, esse radar é chamado de onda contínua modulada em frequência (FMCW)Radar ou radar Doppler FMCW. É também chamado de Radar Modulado por Frequência de Onda Contínua ou Radar CWFM.
Este radar requer duas antenas. Entre as quais, uma antena é usada para transmitir o sinal e a outra antena é usada para receber o sinal. Ele mede não apenas a velocidade do alvo, mas também a distância entre o alvo e o radar.
Em nossos capítulos subsequentes, discutiremos as operações de todos esses radares em detalhes.
O Radar, que opera com sinal de pulso para detecção de alvos estacionários, é denominado Radar de Pulso Básico ou simplesmente, Pulse Radar. Neste capítulo, vamos discutir o funcionamento do radar de pulso.
Diagrama de blocos do radar de pulso
O radar de pulso usa uma única antena para transmitir e receber sinais com a ajuda do Duplexer. A seguir está oblock diagram do radar de pulso -

Vamos agora ver o function de cada bloco do radar de pulso -
Pulse Modulator - Produz um sinal modulado por pulso e é aplicado ao Transmissor.
Transmitter - Transmite o sinal modulado por pulso, que é um trem de pulsos repetitivos.
Duplexer- É um interruptor de microondas, que conecta a antena à seção do transmissor e à seção do receptor alternadamente. A antena transmite o sinal modulado por pulso, quando o duplexador conecta a antena ao transmissor. Da mesma forma, o sinal que é recebido pela Antena será dado ao Amplificador de RF de Baixo Ruído, quando o duplexador conectar a Antena ao Amplificador de RF de Baixo Ruído.
Low Noise RF Amplifier- Amplifica o sinal fraco de RF, que é recebido pela antena. A saída deste amplificador é conectada ao Mixer.
Local Oscillator- Produz um sinal com frequência estável. A saída do Oscillator Local é conectada ao Mixer.
Mixer- Sabemos que o Mixer pode produzir soma e diferença das frequências que lhe são aplicadas. Dentre as quais, a diferença das frequências será do tipo Frequência Intermediária (IF).
IF Amplifier- O amplificador IF amplifica o sinal de frequência intermediária (IF). O amplificador IF mostrado na figura permite apenas a Freqüência Intermediária, que é obtida do Mixer e a amplifica. Além disso, melhora a relação sinal / ruído na saída.
Detector - Desmodula o sinal, que é obtido na saída do amplificador IF.
Video Amplifier - Como o nome sugere, amplifica o sinal de vídeo, que é obtido na saída do detector.
Display - Em geral, ele exibe o sinal de vídeo amplificado na tela CRT.
Neste capítulo, discutimos como o radar de pulso funciona e como ele é útil para detectar alvos estacionários. Em nossos capítulos subsequentes, discutiremos os radares, que são úteis para detectar alvos não estacionários.
Neste capítulo, aprenderemos sobre o efeito Doppler em sistemas de radar.
Se o alvo não estiver estacionário, haverá uma mudança na frequência do sinal que é transmitido do Radar e que é recebido pelo Radar. Este efeito é conhecido comoDoppler effect.
De acordo com o efeito Doppler, obteremos os seguintes dois casos possíveis -
o frequency do sinal recebido irá increase, quando o alvo se move em direção ao radar.
o frequency do sinal recebido irá decrease, quando o alvo se afasta do radar.
Agora, vamos derivar a fórmula para a frequência Doppler.
Derivação da frequência Doppler
A distância entre o radar e o alvo nada mais é do que Range do alvo ou simplesmente alcance, R. Portanto, a distância total entre o radar e o alvo em um caminho de comunicação bidirecional será 2R, uma vez que o radar transmite um sinal para o alvo e, consequentemente, o alvo envia um sinal de eco para o radar.
E se $\lambda$ é um comprimento de onda, então o número de comprimentos de onda N que estão presentes em um caminho de comunicação bidirecional entre o radar e o alvo será igual a $2R/\lambda$.
Nós sabemos que um comprimento de onda $\lambda$ corresponde a uma excursão angular de $2\pi$radianos. Então ototal angle of excursion feita pela onda eletromagnética durante o caminho de comunicação bidirecional entre o radar e o alvo será igual a $4\pi R/\lambda$ radianos.
A seguir está a fórmula matemática para angular frequency, $\omega$ -
$$\omega=2\pi f\:\:\:\:\:Equation\:1$$
A equação a seguir mostra a relação matemática entre a frequência angular $\omega$ e ângulo de fase $\phi$ -
$$\omega=\frac{d\phi }{dt}\:\:\:\:\:Equation\:2$$
Equate os termos do lado direito da Equação 1 e Equação 2, uma vez que os termos do lado esquerdo dessas duas equações são iguais.
$$2\pi f=\frac{d\phi }{dt}$$
$$\Rightarrow f =\frac{1}{2\pi}\frac{d\phi }{dt}\:\:\:\:\:Equation\:3$$
Substitute,$f=f_d$ e $\phi=4\pi R/\lambda$ na Equação 3.
$$f_d =\frac{1}{2\pi}\frac{d}{dt}\left ( \frac{4\pi R}{\lambda} \right )$$
$$\Rightarrow f_d =\frac{1}{2\pi}\frac{4\pi}{\lambda}\frac{dR}{dt}$$
$$\Rightarrow f_d =\frac{2V_r}{\lambda}\:\:\:\:\:Equation\:4$$
Onde,
$f_d$ é a frequência Doppler
$V_r$ é a velocidade relativa
Podemos encontrar o valor da frequência Doppler $f_d$ substituindo os valores de $V_r$ e $\lambda$ na Equação 4.
Substitute, $\lambda=C/f$ na Equação 4.
$$f_d =\frac{2V_r}{C/f}$$
$$\Rightarrow f_d =\frac{2V_rf}{C}\:\:\:\:\:Equation\:5$$
Onde,
$f$ é a frequência do sinal transmitido
$C$ é a velocidade da luz e é igual a $3\times 10^8m/sec$
Podemos encontrar o valor da frequência Doppler, $f_d$ substituindo os valores de $V_r,f$ e $C$ na Equação 5.
Note - Tanto a Equação 4 quanto a Equação 5 mostram as fórmulas da frequência Doppler, $f_d$. Podemos usar a Equação 4 ou a Equação 5 para encontrarDoppler frequency, $f_d$ com base nos dados fornecidos.
Exemplo de problema
Se o radar opera a uma frequência de $5GHZ$, então encontre o Doppler frequency de uma aeronave se movendo a uma velocidade de 100 km / h.
Solução
Dado,
A frequência do sinal transmitido, $f=5GHZ$
Velocidade da aeronave (alvo), $V_r=100KMph$
$$\Rightarrow V_r=\frac{100\times 10^3}{3600}m/sec$$
$$\Rightarrow V_r=27.78m/sec$$
Nós convertemos a velocidade dada da aeronave (alvo), que está presente em KMph em seu equivalente m / s.
Nós sabemos que, a velocidade da luz, $C=3\times 10^8m/sec$
Agora, a seguir está o formula for Doppler frequency -
$$f_d=\frac{2Vrf}{C}$$
Substitute os valores de ð ?? '‰ ð ??' Ÿ, $V_r,f$ e $C$ na equação acima.
$$\Rightarrow f_d=\frac{2\left ( 27.78 \right )\left ( 5\times 10^9 \right )}{3\times 10^8}$$
$$\Rightarrow f_d=926HZ$$
Portanto, o valor de Doppler frequency, $f_d$ é $926HZ$ para as especificações fornecidas.
O radar básico usa a mesma antena para transmissão e recepção de sinais. Podemos utilizar este tipo de Radar, quando o alvo estiver parado, ou seja, sem movimento e / ou quando aquele Radar puder ser operado com sinal de pulso.
O Radar, que opera com sinal contínuo (onda) para detecção de alvos não estacionários, é denominado Radar de Onda Contínua ou simplesmente CW Radar. Este radar requer duas antenas. Entre as quais, uma antena é usada para transmitir o sinal e a outra antena é usada para receber o sinal.
Diagrama de blocos do radar CW
Sabemos que o radar Doppler CW contém duas antenas - antena transmissora e antena receptora. A figura a seguir mostra oblock diagram do radar CW -

O diagrama de blocos do CW Doppler Radar contém um conjunto de blocos e o function de cada bloco é mencionado abaixo.
CW Transmitter - Produz um sinal analógico com uma frequência de $f_o$. A saída do Transmissor CW é conectada à Antena de transmissão e ao Mixer-I.
Local Oscillator - Produz um sinal com uma frequência de $f_l$. A saída do Oscillator local é conectada ao Mixer-I.
Mixer-I- Mixer pode produzir soma e diferença das frequências que são aplicadas a ele. Os sinais com frequências de$f_o$ e $f_l$são aplicados ao Mixer-I. Então, o Mixer-I irá produzir a saída com frequências$f_o+f_l$ ou $f_o−f_l$.
Side Band Filter- Como o nome sugere, o filtro de banda lateral permite frequências específicas da banda lateral - freqüências da banda lateral superior ou frequências da banda lateral inferior. O filtro da banda lateral mostrado na figura acima produz apenas a frequência da banda lateral superior, ou seja,$f_o+f_l$.
Mixer-II- Mixer pode produzir soma e diferença das frequências que são aplicadas a ele. Os sinais com frequências de$f_o+f_l$ e $f_o\pm f_d$são aplicados ao Mixer-II. Portanto, o Mixer-II produzirá a saída com frequências de 2$f_o+f_l\pm f_d$ ou $f_l\pm f_d$.
IF Amplifier- O amplificador IF amplifica o sinal de frequência intermediária (IF). O amplificador IF mostrado na figura permite apenas a frequência intermediária,$f_l\pm f_d$ e o amplifica.
Detector - Ele detecta o sinal, que está tendo frequência Doppler, $f_d$.
Doppler Amplifier - Como o nome sugere, o amplificador Doppler amplifica o sinal, que tem frequência Doppler, $f_d$.
Indicator - Indica a velocidade relativa relacionada à informação e se o alvo está entrando ou saindo.
Os radares Doppler CW fornecem medições precisas de relative velocities. Portanto, eles são usados principalmente, onde a informação de velocidade é mais importante do que a faixa real.
Se o radar Doppler CW usa a modulação de frequência, esse radar é denominado FMCW Doppler Radar ou simplesmente, FMCW Radar. É também chamado de Radar Modulado por Frequência de Onda Contínua ou Radar CWFM. Ele mede não apenas a velocidade do alvo, mas também a distância entre o alvo e o radar.
Diagrama de blocos do radar FMCW
O radar FMCW é usado principalmente como radar altímetro para medir a altura exata durante o pouso da aeronave. A figura a seguir mostra oblock diagram do Radar FMCW -

FMCW Radarcontém duas antenas - antena de transmissão e antena de recepção, conforme mostrado na figura. A antena transmissora transmite o sinal e a antena receptora recebe o sinal de eco.
O diagrama de blocos do radar FMCW é semelhante ao diagrama de blocos do radar CW. Ele contém alguns blocos modificados e alguns outros blocos além dos blocos que estão presentes no diagrama de blocos do Radar CW. ofunction de cada bloco do radar FMCW é mencionado abaixo.
FM Modulator - Produz um sinal de frequência modulada (FM) com frequência variável, $f_o\left (t \right )$ e é aplicado ao transmissor FM.
FM Transmitter- Transmite o sinal FM com a ajuda da Antena Transmissora. A saída do transmissor FM também é conectada ao Mixer-I.
Local Oscillator- Em geral, o Oscilador local é usado para produzir um sinal de RF. Mas, aqui é usado para produzir um sinal com uma frequência intermediária,$f_{IF}$. A saída do Oscillator Local é conectada ao Mixer-I e ao Detector Balanceado.
Mixer-I- Mixer pode produzir soma e diferença das frequências que são aplicadas a ele. Os sinais com frequências de$f_o\left (t \right )$ e $f_{IF}$são aplicados ao Mixer-I. Então, o Mixer-I produzirá a saída com frequência$f_o\left (t \right )+f_{IF}$ ou $f_o\left (t \right )-f_{IF}$.
Side Band Filter- Permite apenas uma freqüência da banda lateral, ou seja, freqüências da banda lateral superior ou freqüências da banda lateral inferior. O filtro de banda lateral mostrado na figura produz apenas frequência de banda lateral inferior. ie,$f_o\left (t \right )-f_{IF}$.
Mixer-II- Mixer pode produzir soma e diferença das frequências que são aplicadas a ele. Os sinais com frequências de$f_o\left (t \right )-f_{IF}$ e $f_o\left (t-T \right )$são aplicados ao Mixer-II. Portanto, o Mixer-II produzirá a saída com frequência$f_o\left (t-T \right )+f_o\left (t \right )-f_{IF}$ ou $f_o\left (t-T \right )-f_o\left (t \right )+f_{IF}$.
IF Amplifier- O amplificador IF amplifica o sinal de frequência intermediária (IF). O amplificador IF mostrado na figura amplifica o sinal com frequência de$f_o\left (t-T \right )-f_o\left (t \right )+f_{IF}$. Este sinal amplificado é aplicado como uma entrada para o detector balanceado.
Balanced Detector - É usado para produzir o sinal de saída com frequência de $f_o\left (t-T \right )-f_o\left (t \right )$ dos dois sinais de entrada aplicados, que têm frequências de $f_o\left (t-T \right )-f_o\left (t \right )+f_{IF}$ e $f_{IF}$. A saída do detector balanceado é aplicada como uma entrada para o amplificador de baixa frequência.
Low Frequency Amplifier- Amplifica a saída do detector balanceado para o nível necessário. A saída do amplificador de baixa frequência é aplicada ao contador de frequência comutado e ao contador de frequência média.
Switched Frequency Counter - É útil para obter o valor da velocidade Doppler.
Average Frequency Counter - É útil para obter o valor de Range.
Se o radar for usado para detectar o alvo móvel, ele deverá receber apenas o sinal de eco devido a esse alvo móvel. Este sinal de eco é o desejado. No entanto, em aplicações práticas, o radar recebe os sinais de eco devido a objetos estacionários, além do sinal de eco devido a esse alvo móvel.
Os sinais de eco devido a objetos estacionários (lugares), como terra e mar, são chamados cluttersporque esses são sinais indesejados. Portanto, temos que escolher o Radar de forma que considere apenas o sinal de eco devido ao alvo móvel, mas não a desordem.
Para isso, o Radar usa o princípio do Efeito Doppler para distinguir os alvos não estacionários dos objetos estacionários. Este tipo de radar é chamado de radar indicador de alvo móvel ou simplesmente,MTI Radar.
De acordo com Doppler effect, a frequência do sinal recebido aumentará se o alvo estiver se movendo na direção do radar. Da mesma forma, a frequência do sinal recebido diminuirá se o alvo estiver se afastando do radar.
Tipos de Radares MTI
Podemos classificar os radares MTI nas seguintes two types com base no tipo de transmissor que foi usado.
- Radar MTI com transmissor amplificador de potência
- Radar MTI com transmissor de oscilador de potência
Agora, vamos discutir sobre esses dois radares MTI, um por um.
Radar MTI com transmissor amplificador de potência
O radar MTI usa uma única antena para transmissão e recepção de sinais com a ajuda do Duplexer. oblock diagram do radar MTI com transmissor amplificador de potência é mostrado na figura a seguir.
o function de cada bloco do radar MTI com transmissor amplificador de potência é mencionado abaixo.
Pulse Modulator - Produz um sinal modulado por pulso e é aplicado ao amplificador de potência.
Power Amplifier - Amplifica os níveis de potência do sinal modulado por pulso.
Local Oscillator - Produz um sinal com frequência estável $f_l$. Por isso, também é chamado de Oscilador local estável. A saída do Oscillator Local é aplicada ao Mixer-I e Mixer-II.
Coherent Oscillator - Produz um sinal com frequência intermediária, $f_c$. Este sinal é usado como sinal de referência. A saída do Oscilador Coerente é aplicada ao Mixer-I e ao Detector de Fase.
Mixer-I- O Mixer pode produzir a soma ou a diferença das frequências que são aplicadas a ele. Os sinais com frequências de$f_l$ e $f_c$são aplicados ao Mixer-I. Aqui, o Mixer-I é usado para produzir a saída, que está tendo a frequência$f_l+f_c$.
Duplexer- É um interruptor de micro-ondas, que conecta a Antena à seção do transmissor ou à seção do receptor com base na necessidade. A antena transmite o sinal com frequência$f_l+f_c$quando o duplexador conecta a antena ao amplificador de potência. Da mesma forma, a antena recebe o sinal com frequência de$f_l+f_c\pm f_d$ quando o duplexador conecta a antena ao Mixer-II.
Mixer-II- O Mixer pode produzir a soma ou a diferença das frequências que são aplicadas a ele. Os sinais com frequências$f_l+f_c\pm f_d$ e $f_l$são aplicados ao Mixer-II. Aqui, o Mixer-II é usado para produzir a saída, que está tendo a frequência$f_c\pm f_d$.
IF Amplifier- O amplificador IF amplifica o sinal de frequência intermediária (IF). O amplificador IF mostrado na figura amplifica o sinal com frequência$f_c+f_d$. Este sinal amplificado é aplicado como uma entrada para o detector de fase.
Phase Detector - É usado para produzir o sinal de saída com frequência $f_d$ dos dois sinais de entrada aplicados, que têm as frequências de $f_c+f_d$ e $f_c$. A saída do detector de fase pode ser conectada ao cancelador de linha de atraso.
Radar MTI com transmissor de oscilador de potência
O diagrama de blocos do Radar MTI com transmissor oscilador de potência é semelhante ao diagrama de blocos do Radar MTI com transmissor amplificador de potência. Os blocos correspondentes à seção receptora serão iguais em ambos os diagramas de blocos. Considerando que, os blocos correspondentes à seção do transmissor podem diferir em ambos os diagramas de blocos.
o block diagram do radar MTI com transmissor oscilador de potência é mostrado na figura a seguir.
Conforme mostrado na figura, o radar MTI usa a única antena para transmissão e recepção de sinais com a ajuda do Duplexer. ooperation do radar MTI com transmissor oscilador de potência é mencionado abaixo.
A saída do Oscilador Magnetron e a saída do Oscilador Local são aplicadas ao Mixer-I. Isso irá produzir ainda mais umIF signal, cuja fase está diretamente relacionada à fase do sinal transmitido.
A saída do Mixer-I é aplicada ao Oscillator Coerente. Portanto, a fase de saída do Oscilador Coerente serálockedpara a fase do sinal IF. Isso significa que a fase da saída do Oscilador Coerente também se relacionará diretamente com a fase do sinal transmitido.
Assim, a saída do Oscilador Coerente pode ser usada como sinal de referência para comparar o sinal de eco recebido com o sinal transmitido correspondente usando phase detector.
As tarefas acima serão repetidas para cada novo sinal transmitido.
Sistemas de radar - canceladores de linha de atraso
Neste capítulo, aprenderemos sobre canceladores de linha de retardo em sistemas de radar. Como o nome sugere, a linha de atraso introduz uma certa quantidade de atraso. Assim, a linha de atraso é usada principalmente no cancelador de linha de atraso, a fim de introduzir umdelay do tempo de repetição do pulso.
Delay line cancelleré um filtro, que elimina os componentes DC dos sinais de eco recebidos de alvos estacionários. Isso significa que ele permite os componentes AC dos sinais de eco recebidos de alvos não estacionários, ou seja, alvos móveis.
Tipos de canceladores de linha de atraso
Os canceladores de linha de atraso podem ser classificados nos seguintes two types com base no número de linhas de atraso que estão presentes nele.
- Cancelador de linha de atraso único
- Cancelamento de linha de atraso duplo
Em nossas seções subsequentes, discutiremos mais sobre esses dois canceladores de linha de atraso.
Cancelador de linha de atraso único
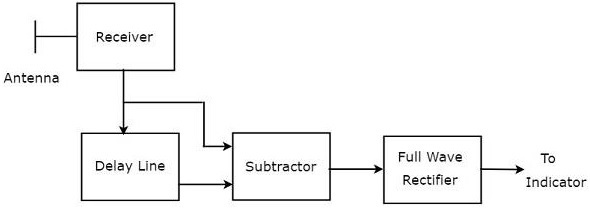
A combinação de uma linha de atraso e um subtrator é conhecida como cancelador de linha de atraso. É também chamado de cancelador de linha de atraso único. oblock diagram do receptor MTI com cancelador de linha de atraso único é mostrado na figura abaixo.
Podemos escrever o mathematical equation do sinal de eco recebido após o efeito Doppler como -
$$V_1=A\sin\left [ 2\pi f_dt-\phi_0 \right ]\:\:\:\:\:Equation\:1$$
Onde,
A é a amplitude do sinal de vídeo
$f_d$ é a frequência Doppler
$\phi_o$ é a mudança de fase e é igual a $4\pi f_tR_o/C$
Vamos pegar o output of Delay line canceller, substituindo $t$ de $t-T_P$ na Equação 1.
$$V_2=A\sin\left [ 2\pi f_d\left ( t-T_P\right )-\phi_0 \right ]\:\:\:\:\:Equation\:2$$
Onde,
$T_P$ é o tempo de repetição do pulso
Vamos pegar o subtractor output subtraindo a Equação 2 da Equação 1.
$$V_1-V_2=A\sin\left [ 2\pi f_dt-\phi_0 \right ]-A\sin\left [ 2\pi f_d\left ( t-T_P\right )-\phi_0 \right ]$$
$$\Rightarrow V_1-V_2=2A\sin\left [ \frac{ 2\pi f_dt-\phi_0-\left [ 2\pi f_d\left ( t-T_P \right )-\phi_0 \right ]}{2}\right ]\cos\left [ \frac{ 2\pi f_dt-\phi_o+2\pi f_d\left ( t-T_P \right )-\phi_0 }{2}\right ]$$
$$V_1-V_2=2A\sin\left [ \frac{2\pi f_dT_P}{2} \right ]\cos\left [ \frac{2\pi f_d\left ( 2t-T_P \right )-2\phi_0}{2} \right ]$$
$$\Rightarrow V_1-V_2=2A\sin\left [ \pi f_dT_p \right ]\cos\left [ 2\pi f_d\left ( t-\frac{T_P}{2} \right )-\phi_0 \right ]\:\:\:\:\:Equation\:3$$
A saída do subtrator é aplicada como entrada para o retificador de onda completa. Portanto, a saída do Retificador Full Wave se parece com a mostrada na figura a seguir. Não é nada além defrequency response do cancelador de linha de atraso único.

Da Equação 3, podemos observar que a resposta de frequência do cancelador de linha de atraso único torna-se zero, quando $\pi f_dT_P$ é igual a integer multiples of $\pi$ Isso significa, $\pi f_dT_P$ é igual a $n\pi$ Matematicamente, pode ser escrito como
$$\pi f_dT_P=n\pi$$
$$\Rightarrow f_dT_P=n$$
$$\Rightarrow f_d=\frac{n}{T_P}\:\:\:\:\:Equation\:4$$
Da Equação 4, podemos concluir que a resposta de frequência do cancelador de linha de atraso único torna-se zero, quando a frequência Doppler $f_d$ é igual a múltiplos inteiros do recíproco do tempo de repetição do pulso $T_P$.
Sabemos a seguinte relação entre o tempo de repetição do pulso e a frequência de repetição do pulso.
$$f_d=\frac{1}{T_P}$$
$$\Rightarrow \frac{1}{T_P}=f_P\:\:\:\:\:Equation\:5$$
Obteremos a seguinte equação, substituindo a Equação 5 na Equação 4.
$$\Rightarrow f_d=nf_P\:\:\:\:\:Equation\:6$$
Da Equação 6, podemos concluir que a resposta de frequência do cancelador de linha de atraso único torna-se zero, quando a frequência Doppler, $f_d$ é igual a múltiplos inteiros de frequência de repetição de pulso $f_P$.
Velocidades cegas
Pelo que aprendemos até agora, o cancelador de linha de atraso único elimina os componentes DC dos sinais de eco recebidos de alvos estacionários, quando $n$é igual a zero. Além disso, também elimina os componentes AC dos sinais de eco recebidos de alvos não estacionários, quando a frequência Doppler$f_d$ é igual a inteiro (other than zero) múltiplos de frequência de repetição de pulso $f_P$.
Assim, as velocidades relativas para as quais a resposta de frequência do cancelador de linha de atraso único torna-se zero são chamadas blind speeds. Matematicamente, podemos escrever a expressão para velocidade cega$v_n$ como -
$$v_n=\frac{n\lambda}{2T_P}\:\:\:\:\:Equation\:7$$
$$\Rightarrow v_n=\frac{n\lambda f_P}{2}\:\:\:\:\:Equation\:8$$
Onde,
$n$ é um número inteiro e é igual a 1, 2, 3 e assim por diante
$\lambda$ é o comprimento de onda operacional
Exemplo de problema
Um radar MTI opera a uma frequência de $6GHZ$ com uma frequência de repetição de pulso de $1KHZ$. Encontre o primeiro, o segundo e o terceiroblind speeds deste Radar.
Solução
Dado,
A frequência de operação do radar MTI, $f=6GHZ$
Frequência de repetição de pulso, $f_P=1KHZ$.
A seguir está a fórmula para operating wavelength $\lambda$ em termos de freqüência de operação, f.
$$\lambda=\frac{C}{f}$$
Substituto, $C=3\times10^8m/sec$ e $f=6GHZ$ na equação acima.
$$\lambda=\frac{3\times10^8}{6\times10^9}$$
$$\Rightarrow \lambda=0.05m$$
Então o operating wavelength $\lambda$ é igual a $0.05m$, quando a frequência operacional f é $6GHZ$.
Nós sabemos o seguinte formula for blind speed.
$$v_n=\frac{n\lambda f_p}{2}$$
Substituindo, $n$= 1,2 e 3 na equação acima, obteremos as seguintes equações para a primeira, segunda e terceira velocidades cegas, respectivamente.
$$v_1=\frac{1\times \lambda f_p}{2}=\frac{\lambda f_p}{2}$$
$$v_2=\frac{2\times \lambda f_p}{2}=2\left ( \frac{\lambda f_p}{2} \right )=2v_1$$
$$v_3=\frac{3\times \lambda f_p}{2}=3\left ( \frac{\lambda f_p}{2} \right )=3v_1$$
Substitute os valores de $\lambda$ e $f_P$ na equação da primeira velocidade cega.
$$v_1=\frac{0.05\times 10^3}{2}$$
$$\Rightarrow v_1=25m/sec$$
Portanto, o first blind speed $v_1$ é igual a $25m/sec$ para as especificações fornecidas.
Obteremos os valores de second & third blind speeds Como $50m/sec$E $75m/sec$ respectivamente, substituindo o valor de ð ?? '£ 1 nas equações da segunda e terceira velocidades cegas.
Cancelamento de linha de atraso duplo
Sabemos que um único cancelador de linha de retardo consiste em uma linha de retardo e um subtrator. Se dois canceladores de linha de atraso estiverem conectados em cascata, essa combinação será chamada de cancelador de linha de atraso duplo. oblock diagram de cancelador de linha de atraso duplo é mostrado na figura a seguir.

Deixei $p\left ( t \right )$ e $q\left ( t \right )$ser a entrada e a saída do primeiro cancelador de linha de atraso. Obteremos a seguinte relação matemática defirst delay line canceller.
$$q\left ( t \right )=p\left ( t \right )-p\left ( t-T_P \right )\:\:\:\:\:Equation\:9$$
A saída do primeiro cancelador de linha de atraso é aplicada como uma entrada para o segundo cancelador de linha de atraso. Conseqüentemente,$q\left ( t \right )$será a entrada do segundo cancelador de linha de atraso. Deixei$r\left ( t \right )$ser a saída do segundo cancelador de linha de retardo. Obteremos a seguinte relação matemática dosecond delay line canceller.
$$r\left ( t \right )=q\left ( t \right )-q\left ( t-T_P \right )\:\:\:\:\:Equation\:10$$
Substituir $t$ de $t-T_P$ na Equação 9.
$$q\left ( t-T_P \right )=p\left ( t-T_P \right )-p\left ( t-T_P-T_P \right )$$
$$q\left ( t-T_P \right )=p\left ( t-T_P \right )-p\left ( t-2T_P \right )\:\:\:\:\:Equation\:11$$
Substitute, Equação 9 e Equação 11 na Equação 10.
$$r\left ( t \right )=p\left ( t \right )-p\left ( t-T_P \right )-\left [ p\left ( t-T_P \right )-p\left ( t-2T_P \right ) \right ]$$
$$\Rightarrow r\left ( t \right )=p\left ( t \right )-2p\left ( t-T_P \right )+p\left ( t-2T_P \right )\:\:\:\:\:Equation\:12$$
o advantagedo cancelador de linha de atraso duplo é que ele rejeita a desordem amplamente. A saída de dois canceladores de linha de atraso, que estão em cascata, será igual ao quadrado da saída do cancelador de linha de atraso único.
Assim, a magnitude da saída do cancelador de linha de atraso duplo, que está presente no receptor de radar MTI, será igual a $4A^2\left ( \sin\left [ \pi f_dT_P \right ] \right )^2$.

As características de resposta de frequência do cancelador de linha de atraso duplo e da combinação em cascata de dois canceladores de linha de atraso são as mesmas. oadvantage do cancelador de linha de atraso no domínio do tempo é que ele pode ser operado para todas as faixas de frequência.
Sistemas de radar - radar de rastreamento
O radar, que é usado para rastrear o caminho de um ou mais alvos, é conhecido como Tracking Radar. Em geral, ele executa as seguintes funções antes de iniciar a atividade de rastreamento.
- Detecção de alvo
- Alcance do alvo
- Encontrando ângulos de elevação e azimute
- Encontrando mudança de frequência Doppler
Portanto, o radar de rastreamento rastreia o alvo rastreando um dos três parâmetros - alcance, ângulo, mudança de frequência Doppler. A maioria dos radares de rastreamento usa oprinciple of tracking in angle. Agora, vamos discutir o que é rastreamento angular.
Rastreamento Angular
Os feixes de lápis da antena de radar realizam o rastreamento em ângulo. O eixo da antena do radar é considerado a direção de referência. Se a direção do alvo e a direção de referência não forem iguais, então haveráangular error, que nada mais é do que a diferença entre as duas direções.
Se o sinal de erro angular for aplicado a um sistema de controle servo, ele moverá o eixo da antena de radar na direção do alvo. Tanto o eixo da antena de radar quanto a direção do alvocoincidequando o erro angular é zero. Existe um mecanismo de feedback no radar de rastreamento, que funciona até que o erro angular se torne zero.
A seguir estão os two techniques, que são usados no rastreamento angular.
- Lobing Sequencial
- Varredura cônica
Agora, vamos discutir sobre essas duas técnicas, uma por uma.
Lobing Sequencial
Se os feixes da antena são alternados entre dois padrões alternadamente para rastrear o alvo, então é chamado sequential lobing. É também chamada de comutação sequencial e comutação de lóbulo. Esta técnica é usada para encontrar o erro angular em uma coordenada. Ele fornece os detalhes da magnitude e da direção do erro angular.
A figura a seguir mostra um exemplo de lóbulo sequencial em polar coordinates.
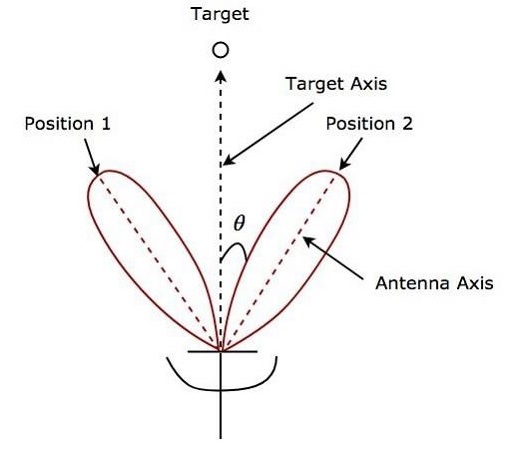
Conforme mostrado na figura, os feixes da antena alternam entre a Posição 1 e a Posição 2 alternadamente. O erro angular θ é indicado na figura acima. O lóbulo sequencial fornece a posição do alvo com alta precisão. Este é o principaladvantage de lobing sequencial.
Varredura cônica
Se o feixe da antena gira continuamente para rastrear um alvo, ele é chamado conical scanning. A modulação de varredura cônica é usada para encontrar a posição do alvo. A figura a seguir mostra um exemplo de digitalização cônica.

Squint angleé o ângulo entre o eixo do feixe e o eixo de rotação e é mostrado na figura acima. O sinal de eco obtido do alvo é modulado em uma frequência igual à frequência na qual o feixe da antena gira.
O ângulo entre a direção do alvo e o eixo de rotação determina o amplitude of the modulated signal. Portanto, a modulação de varredura cônica deve ser extraída do sinal de eco e, em seguida, aplicada ao sistema de servo controle, que move o eixo do feixe da antena em direção ao alvo.
Sistemas de radar - Parâmetros da antena
A Antenna ou Aerial é um transdutor que converte energia elétrica em ondas eletromagnéticas e vice-versa.
Uma antena tem os seguintes parâmetros -
- Directivity
- Eficiência de abertura
- Eficiência da antena
- Gain
Agora, vamos discutir esses parâmetros em detalhes -
Diretividade
De acordo com a definição padrão, "A razão da intensidade máxima de radiação da antena em questão para a intensidade de radiação de uma antena isotrópica ou de referência, irradiando a mesma potência total é chamada de Directivity. ”
Embora uma antena irradie poder, a direção em que ela irradia é importante. A antena em estudo é denominada comosubject Antenna. Sua intensidade de radiação é focada em uma determinada direção, enquanto está transmitindo ou recebendo. Conseqüentemente, diz-se que a Antena tem sua diretividade nessa direção específica.
A proporção da intensidade de radiação em uma determinada direção de uma antena para a intensidade de radiação média em todas as direções, é denominada como Directivity.
Se essa direção particular não for especificada, então a direção na qual a intensidade máxima é observada pode ser tomada como a diretividade daquela Antena.
A diretividade de uma antena não isotrópica é igual à razão entre a intensidade da radiação em uma determinada direção e a intensidade da radiação da fonte isotrópica.
Mathematically, podemos escrever a expressão para Diretividade como -
$$Directivity=\frac{U_{Max}\left (\theta,\phi\right )}{U_0}$$
Onde,
$U_{Max}\left (\theta,\phi\right )$ é a intensidade máxima de radiação da antena em questão
$U_0$ é a intensidade da radiação de uma antena isotrópica.
Eficiência de abertura
De acordo com a definição padrão, “Aperture efficiency de uma antena é a relação entre a área de radiação efetiva (ou área efetiva) e a área física da abertura. ”
Uma antena irradia energia através de uma abertura. Essa radiação deve ser eficaz com perdas mínimas. A área física da abertura também deve ser levada em consideração, pois a eficácia da radiação depende da área da abertura, fisicamente na Antena.
Mathematically, podemos escrever a expressão para eficiência de abertura $\epsilon_A$ Como
$$\epsilon _A=\frac{A_{eff}}{A_p}$$
Onde,
$A_{eff}$ é a área efetiva
$A_P$ é a área física
Eficiência da antena
De acordo com a definição padrão, “Antenna Efficiency é a relação entre a potência irradiada da antena e a potência de entrada aceita pela antena. ”
Qualquer antena é projetada para irradiar potência com perdas mínimas, para uma determinada entrada. A eficiência de uma antena explica o quanto uma antena é capaz de entregar sua saída de forma eficaz com perdas mínimas na linha de transmissão. Também é chamadoRadiation Efficiency Factor da Antena.
Mathematically, podemos escrever a expressão para eficiência da antena 𝜂𝑒 como -
$$\eta _e=\frac{P_{Rad}}{P_{in}}$$
Onde,
$P_{Rad}$ é a quantidade de energia irradiada
$P_{in}$ é a potência de entrada para a antena
Ganho
De acordo com a definição padrão, “Gain de uma antena é a razão da intensidade da radiação em uma determinada direção para a intensidade da radiação que seria obtida se a potência aceita pela antena fosse irradiada isotropicamente. ”
Simplesmente, Gainde uma antena leva em conta a diretividade da antena junto com seu desempenho eficaz. Se a potência aceita pela Antena foi irradiada isotropicamente (ou seja, em todas as direções), então a intensidade de radiação que obtemos pode ser tomada como referencial.
O termo Antenna gain descreve quanta energia é transmitida na direção do pico de radiação para uma fonte isotrópica.
O ganho é geralmente medido em dB.
Ao contrário da diretividade, o ganho da antena leva em consideração as perdas que ocorrem e, portanto, concentra-se na eficiência.
Mathematically, podemos escrever a expressão para ganho de antena $G$ como -
$$G=\eta_eD$$
Onde,
$\eta_e$ é a eficiência da antena
$D$ é a diretividade da antena
Sistemas de radar - antenas de radar
Neste capítulo, vamos aprender sobre as antenas, que são úteis na comunicação por radar. Podemos classificar as antenas de radar nas seguintestwo types com base na estrutura física.
- Antenas refletoras parabólicas
- Antenas de lente
Em nossas seções subsequentes, discutiremos os dois tipos de antenas em detalhes.
Antenas refletoras parabólicas
As antenas refletoras parabólicas são as antenas de micro-ondas. O conhecimento do refletor parabólico é essencial para entender o funcionamento das antenas em profundidade.
Princípio da Operação
Parabola nada mais é do que o Locus dos pontos, que se movem de tal forma que sua distância do ponto fixo (denominado foco) mais sua distância de uma linha reta (denominada diretriz) são constantes.
A figura a seguir mostra o geometry of parabolic reflector. Os pontos F e V são o foco (o feed é dado) e o vértice, respectivamente. A linha que une F e V é o eixo de simetria.$P_1Q_1, P_2Q_2$ e $P_3Q_3$são os raios refletidos. A linha L representa a diretriz na qual os pontos refletidos se encontram (para dizer que eles estão sendo colineares).

Conforme mostrado na figura, a distância entre F e L é constante em relação às ondas que estão sendo focalizadas. A onda refletida forma uma frente de onda colimada, fora do formato parabólico. A proporção da distância focal para o tamanho da abertura (ou seja,$f/D$ ) é conhecido como “f over D ratio”. É um parâmetro importante do refletor parabólico e seu valor varia de0.25 to 0.50.
o law of reflectionafirma que o ângulo de incidência e o ângulo de reflexão são iguais. Esta lei, quando usada junto com uma parábola, ajuda o foco do feixe. A forma da parábola, quando usada para fins de reflexão das ondas, exibe algumas propriedades da parábola, que são úteis para a construção de uma Antena, usando as ondas refletidas.
Propriedades da parábola
A seguir estão as diferentes propriedades de Parabola -
Todas as ondas originadas do foco refletem de volta ao eixo parabólico. Portanto, todas as ondas que atingem a abertura estão em fase.
Como as ondas estão em fase, o feixe de radiação ao longo do eixo parabólico será forte e concentrado.
Seguindo esses pontos, os refletores parabólicos auxiliam na produção de alta diretividade com largura de feixe mais estreita.
Construção e funcionamento de um refletor parabólico
Se uma antena reflectora parabólica for usada para transmitting a signal, o sinal do feed sai de uma antena dipolo ou antena de chifre, para focar a onda na parábola. Isso significa que as ondas saem do ponto focal e atingem o refletor parabolóide. Esta onda agora é refletida como frente de onda colimada, conforme discutido anteriormente, para ser transmitida.
A mesma antena é usada como um receiver. Quando a onda eletromagnética atinge a forma da parábola, a onda é refletida no ponto de alimentação. A antena dipolo ou corneta Antena, que atua como antena receptora em sua alimentação, recebe esse sinal para convertê-lo em sinal elétrico e encaminhá-lo para o circuito receptor.
O ganho do parabolóide é uma função da razão de abertura $D/\lambda$. O poder irradiado eficaz(ERP) de uma antena é a multiplicação da potência de entrada fornecida à antena e seu ganho de potência.
Normalmente, uma antena de chifre de guia de onda é usada como um radiador de alimentação para a antena refletora parabolóide. Junto com esta técnica, temos os seguintes dois tipos de alimentação dados à antena refletor parabolóide.
- Cassegrain Feed
- Alimentação Gregoriana
Cassegrain Feed
Nesse tipo, o feed está localizado no vértice do parabolóide, ao contrário do refletor parabólico. Um refletor de formato convexo, que atua como um hiperbolóide, é colocado do lado oposto à alimentação da Antena. Também é conhecido comosecondary hyperboloid reflectorou sub-refletor. É colocado de forma que um de seus focos coincida com o foco do parabolóide. Assim, a onda é refletida duas vezes.
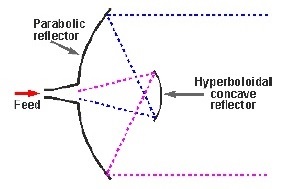
A figura acima mostra o modelo de trabalho da alimentação cassegrain.
Alimentação Gregoriana
O tipo de alimentação onde um par de certas configurações estão lá e onde a largura do feixe de alimentação é progressivamente aumentada enquanto as dimensões da antena são mantidas fixas é conhecido como Gregorian feed. Aqui, o hiperbolóide de formato convexo de Cassegrain é substituído por um refletor parabolóide de formato côncavo, que é, obviamente, de tamanho menor.
Esses refletores de alimentação gregoriana podem ser usados das quatro maneiras a seguir -
Sistemas gregorianos usando sub-refletor elipsoidal refletor nos focos F1.
Sistemas gregorianos usando sub-refletor elipsoidal refletor nos focos F2.
Sistemas Cassegrain usando sub-refletor hiperbolóide (convexo).
Sistemas Cassegrain usando sub-refletor hiperbolóide (côncavo, mas a alimentação estando muito perto dele).
Entre os diferentes tipos de antenas refletoras, os refletores parabólicos simples e os refletores parabólicos de alimentação Cassegrain são os mais utilizados.
Antenas de lente
Lens As antenas usam a superfície curva para transmissão e recepção de sinais. Essas antenas são feitas de vidro, onde as propriedades convergentes e divergentes das lentes são seguidas. ofrequency range de uso da antena de lente começa em 1 GHz mas seu uso é maior em 3 GHz and above.
É necessário um conhecimento do Lens para compreender o funcionamento da Antena Lens em profundidade. Lembre-se de que uma lente de vidro normal funciona noprinciple of refraction.
Construção e funcionamento da antena de lente
Se uma fonte de luz é assumida como estando presente em um ponto focal de uma lente, que está a uma distância focal da lente, os raios passam pela lente colimados ou parallel rays na frente da onda plana.
Existem dois fenômenos que acontecem quando os raios caem de lados diferentes de uma lente. Eles são dados aqui -
Os raios que passam pelo centro da lente são menos refratados do que os raios que passam pelas bordas da lente. Todos os raios são enviados paralelamente à frente da onda plana. Este fenômeno do Lens é chamado deDivergence.
O mesmo procedimento é revertido se um feixe de luz for enviado do lado direito para o lado esquerdo da mesma lente. Em seguida, o feixe é refratado e se encontra em um ponto denominado ponto focal, a uma distância focal da lente. Este fenômeno é chamadoConvergence.
O diagrama a seguir nos ajudará a entender melhor o fenômeno.
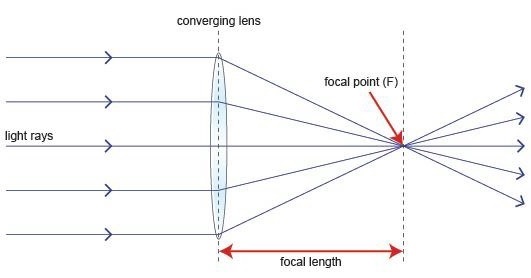
o ray diagramrepresenta o ponto focal e a distância focal da fonte até a lente. Os raios paralelos obtidos também são chamados de raios colimados.
Na figura acima, a fonte no ponto focal, a uma distância focal da lente é colimada na frente da onda plana. Este fenômeno pode ser revertido, o que significa que a luz, se enviada do lado esquerdo, é convergida para o lado direito da lente.
É por causa disso reciprocity, a lente pode ser usada como uma antena, pois o mesmo fenômeno ajuda a utilizar a mesma antena para transmissão e recepção.
Para alcançar as propriedades de foco em frequências mais altas, o índice de refração deve ser menor que a unidade. Qualquer que seja o índice de refração, o objetivo do Lens é endireitar a forma de onda. Com base nisso, as lentes do plano E e do plano H são desenvolvidas, que também atrasam ou aceleram a frente de onda.
Sistemas de radar - Receptor de filtro compatível
Se um filtro produz uma saída de forma a maximizar a relação entre a potência de pico de saída e a potência de ruído média em sua resposta de frequência, esse filtro é chamado Matched filter.
Este é um critério importante, que é considerado ao projetar qualquer receptor de radar. Neste capítulo, vamos discutir a função de resposta em frequência do filtro compatível e a resposta ao impulso do filtro compatível.
Função de resposta de frequência do filtro compatível
A resposta de frequência do filtro Matched será proporcional ao conjugado complexo do espectro do sinal de entrada. Matematicamente, podemos escrever a expressão parafrequency response function, $H\left (f\right )$ do filtro correspondente como -
$$H\left (f\right )=G_aS^\ast\left (f\right )e^{-j2\pi ft_1}\:\:\:\:\:Equation\:1$$
Onde,
$G_a$ é o ganho máximo do filtro compatível
$S\left (f\right )$ é a transformada de Fourier do sinal de entrada, $s\left (t\right )$
$S^\ast\left (f\right )$ é o conjugado complexo de $S\left (f\right )$
$t_1$ é o instante de tempo em que o sinal observado é máximo
Em geral, o valor de $G_a$ is considered as one. We will get the following equation by substituting $G_a=1$ in Equation 1.
$$H\left (f\right )=S^\ast\left (f\right )e^{-j2\pi ft_1}\:\:\:\:\:Equation\:2$$
The frequency response function, $H\left (f\right )$ of the Matched filter is having the magnitude of $S^\ast\left (f\right )$ and phase angle of $e^{-j2\pi ft_1}$, which varies uniformly with frequency.
Impulse Response of Matched Filter
In time domain, we will get the output, $h(t)$ of Matched filter receiver by applying the inverse Fourier transform of the frequency response function, $H(f)$.
$$h\left (t\right )=\int_{-\infty }^{\infty }H\left (f\right )e^{-j2\pi ft_1}df\:\:\:\:\:Equation\:3$$
Substitute, Equation 1 in Equation 3.
$$h\left (t\right )=\int_{-\infty }^{\infty }\lbrace G_aS^\ast\left (f\right )e^{-j2\pi ft_1}\rbrace e^{j2\pi ft}df$$
$$\Rightarrow h\left (t\right )=\int_{-\infty }^{\infty }G_aS^\ast\left (f\right )e^{-j2\pi f\left (t_1-t\right )}df\:\:\:\:\:Equation\:4$$
We know the following relation.
$$S^\ast\left (f\right )=S\left (-f\right )\:\:\:\:\:Equation\:5$$
Substitute, Equation 5 in Equation 4.
$$h\left (t\right )=\int_{-\infty }^{\infty }G_aS(-f)e^{-j2\pi f\left (t_1-t\right )}df$$
$$\Rightarrow h\left (t\right )=\int_{-\infty }^{\infty }G_aS^\left (f\right )e^{j2\pi f\left (t_1-t\right )}df$$
$$\Rightarrow h\left (t\right )=G_as(t_1−t)\:\:\:\:\:Equation\:6$$
In general, the value of $G_a$ is considered as one. We will get the following equation by substituting $G_a=1$ in Equation 6.
$$h(t)=s\left (t_1-t\right )$$
The above equation proves that the impulse response of Matched filter is the mirror image of the received signal about a time instant $t_1$. The following figures illustrate this concept.


The received signal, $s\left (t\right )$ and the impulse response, $h\left (t\right )$ of the matched filter corresponding to the signal, $s\left (t\right )$ are shown in the above figures.
Radar Systems - Radar Displays
An electronic instrument, which is used for displaying the data visually is known as display. So, the electronic instrument which displays the information about Radar’s target visually is known as Radar display. It shows the echo signal information visually on the screen.
Types of Radar Displays
In this section, we will learn about the different types of Radar Displays. The Radar Displays can be classified into the following types.
A-Scope
It is a two dimensional Radar display. The horizontal and vertical coordinates represent the range and echo amplitude of the target respectively. In A-Scope, the deflection modulation takes place. It is more suitable for manually tracking Radar.
B-Scope
It is a two dimensional Radar display. The horizontal and vertical coordinates represent the azimuth angle and the range of the target respectively. In B-Scope, intensity modulation takes place. It is more suitable for military Radars.
C-Scope
It is a two-dimensional Radar display. The horizontal and vertical coordinates represent the azimuth angle and elevation angle respectively. In C-Scope, intensity modulation takes place.
D-Scope
If the electron beam is deflected or the intensity-modulated spot appears on the Radar display due to the presence of target, then it is known as blip. C-Scope becomes D-Scope, when the blips extend vertically in order to provide the distance.
E-Scope
It is a two-dimensional Radar display. The horizontal and vertical coordinates represent the distance and elevation angle respectively. In E-Scope, intensity modulation takes place.
F-Scope
If the Radar Antenna is aimed at the target, then F-Scope displays the target as a centralized blip. So, the horizontal and vertical displacements of the blip represent the horizontal and vertical aiming errors respectively.
G-Scope
If the Radar Antenna is aimed at the target, then G-Scope displays the target as laterally centralized blip. The horizontal and vertical displacements of the blip represent the horizontal and vertical aiming errors respectively.
H-Scope
It is the modified version of B-Scope in order to provide the information about elevation angle of the target. It displays the target as two blips, which are closely spaced. This can be approximated to a short bright line and the slope of this line will be proportional to the sine of the elevation angle.
I-Scope
If the Radar Antenna is aimed at the target, then I-Scope displays the target as a circle. The radius of this circle will be proportional to the distance of the target. If the Radar Antenna is aimed at the target incorrectly, then I-Scope displays the target as a segment instead of circle. The arc length of that segment will be inversely proportional to the magnitude of pointing error.
J-Scope
It is the modified version of A-Scope. It displays the target as radial deflection from time base.
K-Scope
It is the modified version of A-Scope. If the Radar Antenna is aimed at the target, then K-Scope displays the target as a pair of vertical deflections, which are having equal height. If the Radar Antenna is aimed at the target incorrectly, then there will be pointing error. So, the magnitude and the direction of the pointing error depends on the difference between the two vertical deflections.
L-Scope
If the Radar Antenna is aimed at the target, then L-Scope displays the target as two horizontal blips having equal amplitude. One horizontal blip lies to the right of central vertical time base and the other one lies to the left of central vertical time base.
M-Scope
It is the modified version of A-Scope. An adjustable pedestal signal has to be moved along the baseline till it coincides the signal deflections, which are coming from the horizontal position of the target. In this way, the target’s distance can be determined.
N-Scope
It is the modified version of K-Scope. An adjustable pedestal signal is used for measuring distance.
O-Scope
It is the modified version of A-Scope. We will get O-Scope, by including an adjustable notch to A-Scope for measuring distance.
P-Scope
It is a Radar display, which uses intensity modulation. It displays the information of echo signal as plan view. Range and azimuth angle are displayed in polar coordinates. Hence, it is called the Plan Position Indicator or the PPI display.
R-Scope
It is a Radar display, which uses intensity modulation. The horizontal and vertical coordinates represent the range and height of the target respectively. Hence, it is called Range-Height Indicator or RHI display.
Radar Systems - Duplexers
In two-way communication, if we are supposed to use the same Antenna for both transmission and reception of the signals, then we require Duplexer. Duplexer is a microwave switch, which connects the Antenna to the transmitter section for transmission of the signal. Therefore, the Radar cannot receive the signal during transmission time.
Similarly, it connects the Antenna to the receiver section for the reception of the signal. The Radar cannot transmit the signal during reception time. In this way, Duplexer isolates both transmitter and receiver sections.
Types of Duplexers
In this section, we will learn about the different types of duplexers. We can classify the Duplexers into the following three types.
- Branch-type Duplexer
- Balanced Duplexer
- Circulator as Duplexer
In our subsequent sections, we will discuss the types of Duplexers in detail.
Branch-type Duplexer
Branch-type Duplexer consists of two switches — Transmit-Receive (TR) switch and Anti Transmit-Receive (ATR) switch. The following figure shows the block diagram of Branch-type Duplexer −

As shown in the figure, the two switches, TR & ATR are placed at a distance of $\lambda/4$ from the transmission line and both the switches are separated by a distance of $\lambda/4$. The working of Branch-type Duplexer is mentioned below.
During transmission, both TR & ATR will look like an open circuit from the transmission line. Therefore, the Antenna will be connected to the transmitter through transmission line.
During reception, ATR will look like a short circuit across the transmission line. Hence, Antenna will be connected to the receiver through transmission line.
The Branch-type Duplexer is suitable only for low cost Radars, since it is having less power handling capability.
Balanced Duplexer
We know that a two-hole Directional Coupler is a 4-port waveguide junction consisting of a primary waveguide and a secondary waveguide. There are two small holes, which will be common to those two waveguides.
The Balanced Duplexer consists of two TR tubes. The configuration of Balanced Duplexer for transmission purpose is shown in the following figure.

The signal, which is produced by the transmitter has to reach the Antenna for the Antenna to transmit that signal during transmission time. The solid lines with arrow marks shown in the above figure represent how the signal reaches Antenna from transmitter.
The dotted lines with arrow marks shown in the above figure represent the signal, which is leaked from the Dual TR tubes; this will reach only the matched load. So, no signal has been reached to the receiver.
The configuration of Balanced Duplexer for reception purpose is shown in figure given below.

We know that Antenna receives the signal during reception time. The signal which is received by the Antenna has to reach the receiver. The solid lines with arrow marks shown in the above figure represent how the signal is reaching the receiver from Antenna. In this case, Dual TR tubes pass the signal from the first section of waveguide to the next section of waveguide.
The Balanced Duplexer has high power handling capability and high bandwidth when compared to Branch-type Duplexer.
Circulator as Duplexer
We know that the functionality of the circulator is that if we apply an input to a port, then it will be produced at the port, which is adjacent to it in the clockwise direction. There is no output at the remaining ports of the circulator.
So, consider a 4-port circulator and connect the transmitter, Antenna, receiver and matched load to port1, port2, port3 and port4 respectively. Now, let us understand how the 4-port circulator works as Duplexer.
The signal, which is produced by the transmitter has to reach the Antenna for the Antenna will transmit that signal during transmission time. This purpose will be achieved when the transmitter generates a signal at port1.
The signal, which is received by the Antenna has to reach the receiver during reception time. This purpose will be achieved when the Antenna present at port2 receives an external signal.
The following figure shows the block diagram of circulator as Duplexer −

The above figure consists of a 4-port circulator — Transmitter, Antenna and the matched load is connected to port1, port2 and port4 of circulator respectively as discussed in the beginning of the section.
The receiver is not directly connected to port3. Instead, the blocks corresponding to the passive TR limiter are placed between port3 of circulator and receiver. The blocks, TR tube & Diode limiter are the blocks corresponding to passive TR limiter.
Actually, the circulator itself acts as Duplexer. It does not require any additional blocks. However, it will not give any kind of protection to the receiver. Hence, the blocks corresponding to passive TR limiter are used in order to provide the protection to the receiver.
Radar Systems - Phased Array Antennas
A single Antenna can radiate certain amount of power in a particular direction. Obviously, the amount of radiation power will be increased when we use group of Antennas together. The group of Antennas is called Antenna array.
An Antenna array is a radiating system comprising radiators and elements. Each of this radiator has its own induction field. The elements are placed so closely that each one lies in the neighbouring one’s induction field. Therefore, the radiation pattern produced by them, would be the vector sum of the individual ones.
The Antennas radiate individually and while in an array, the radiation of all the elements sum up, to form the radiation beam, which has high gain, high directivity and better performance, with minimum losses.
An Antenna array is said to be Phased Antenna array if the shape and direction of the radiation pattern depends on the relative phases and amplitudes of the currents present at each Antenna of that array.
Radiation Pattern
Let us consider ‘n’ isotropic radiation elements, which when combined form an array. The figure given below will help you understand the same. Let the spacing between the successive elements be ‘d’ units.

As shown in the figure, all the radiation elements receive the same incoming signal. So, each element produces an equal output voltage of $sin \left ( \omega t \right)$. However, there will be an equal phase difference $\Psi$ between successive elements. Mathematically, it can be written as −
$$\Psi=\frac{2\pi d\sin\theta }{\lambda }\:\:\:\:\:Equation\:1$$
Where,
$\theta$ is the angle at which the incoming signal is incident on each radiation element.
Mathematically, we can write the expressions for output voltages of ‘n’ radiation elements individually as
$$E_1=\sin\left [ \omega t \right]$$
$$E_2=\sin\left [\omega t+\Psi\right]$$
$$E_3=\sin\left [\omega t+2\Psi\right]$$
$$.$$
$$.$$
$$.$$
$$E_n=\sin\left [\omega t+\left (N-1\right )\Psi\right]$$
Where,
$E_1, E_2, E_3, …, E_n$ are the output voltages of first, second, third, …, nth radiation elements respectively.
$\omega$ is the angular frequency of the signal.
We will get the overall output voltage $E_a$ of the array by adding the output voltages of each element present in that array, since all those radiation elements are connected in linear array. Mathematically, it can be represented as −
$$E_a=E_1+E_2+E_3+ …+E_n \:\:\:Equation\:2$$
Substitute, the values of $E_1, E_2, E_3, …, E_n$ in Equation 2.
$$E_a=\sin\left [ \omega t \right]+\sin\left [\omega t+\Psi\right ]+\sin\left [\omega t+2\Psi\right ]+\sin\left [\omega t+\left (n-1\right )\Psi\right]$$
$$\Rightarrow E_a=\sin\left [\omega t+\frac{(n-1)\Psi)}{2}\right ]\frac{\sin\left [\frac{n\Psi}{2}\right]}{\sin\left [\frac{\Psi}{2}\right ]}\:\:\:\:\:Equation\:3$$
In Equation 3, there are two terms. From first term, we can observe that the overall output voltage $E_a$ is a sine wave having an angular frequency $\omega$. But, it is having a phase shift of $\left (n−1\right )\Psi/2$. The second term of Equation 3 is an amplitude factor.
The magnitude of Equation 3 will be
$$\left | E_a \right|=\left | \frac{\sin\left [\frac{n\Psi}{2}\right ]}{\sin\left [\frac{\Psi}{2}\right]} \right |\:\:\:\:\:Equation\:4$$
We will get the following equation by substituting Equation 1 in Equation 4.
$$\left | E_a \right|=\left | \frac{\sin\left [\frac{n\pi d\sin\theta}{\lambda}\right]}{\sin\left [\frac{\pi d\sin\theta}{\lambda}\right ]} \right |\:\:\:\:\:Equation\:5$$
Equation 5 is called field intensity pattern. The field intensity pattern will have the values of zeros when the numerator of Equation 5 is zero
$$\sin\left [\frac{n\pi d\sin\theta}{\lambda}\right ]=0$$
$$\Rightarrow \frac{n\pi d\sin\theta}{\lambda}=\pm m\pi$$
$$\Rightarrow nd\sin\theta=\pm m\lambda$$
$$\Rightarrow \sin\theta=\pm \frac{m\lambda}{nd}$$
Where,
$m$ is an integer and it is equal to 1, 2, 3 and so on.
We can find the maximum values of field intensity pattern by using L-Hospital rule when both numerator and denominator of Equation 5 are equal to zero. We can observe that if the denominator of Equation 5 becomes zero, then the numerator of Equation 5 also becomes zero.
Now, let us get the condition for which the denominator of Equation 5 becomes zero.
$$\sin\left [\frac{\pi d\sin\theta}{\lambda}\right ]=0$$
$$\Rightarrow \frac{\pi d\sin\theta}{\lambda}=\pm p\pi$$
$$\Rightarrow d\sin\theta=\pm p\lambda$$
$$\Rightarrow \sin\theta=\pm \frac{p\lambda}{d}$$
Where,
$p$ is an integer and it is equal to 0, 1, 2, 3 and so on.
If we consider $p$ as zero, then we will get the value of $\sin\theta$ as zero. For this case, we will get the maximum value of field intensity pattern corresponding to the main lobe. We will get the maximum values of field intensity pattern corresponding to side lobes, when we consider other values of $p$.
The radiation pattern’s direction of phased array can be steered by varying the relative phases of the current present at each Antenna. This is the advantage of electronic scanning phased array.