Теория адаптивного резонанса
Эта сеть была разработана Стивеном Гроссбергом и Гейл Карпентер в 1987 году. Она основана на конкуренции и использует модель обучения без учителя. Сети теории адаптивного резонанса (ART), как следует из названия, всегда открыты для нового обучения (адаптивного) без потери старых паттернов (резонанс). По сути, сеть ART представляет собой векторный классификатор, который принимает входной вектор и классифицирует его по одной из категорий в зависимости от того, какой из сохраненных шаблонов он больше всего напоминает.
Операционный директор
Основную операцию классификации ART можно разделить на следующие этапы:
Recognition phase- Входной вектор сравнивается с классификацией, представленной в каждом узле выходного слоя. Выход нейрона становится «1», если он лучше всего соответствует применяемой классификации, в противном случае он становится «0».
Comparison phase- На этом этапе выполняется сравнение входного вектора с вектором слоя сравнения. Условием сброса является то, что степень подобия будет меньше параметра бдительности.
Search phase- На этом этапе сеть будет искать сброс, а также соответствие, выполненное на вышеуказанных этапах. Следовательно, если не будет сброса и совпадение будет хорошим, то классификация окончена. В противном случае процесс будет повторяться, и для поиска правильного соответствия необходимо будет отправить другой сохраненный шаблон.
ART1
Это тип ART, предназначенный для кластеризации двоичных векторов. Мы можем понять это по архитектуре.
Архитектура ART1
Он состоит из следующих двух блоков -
Computational Unit - Он состоит из следующего -
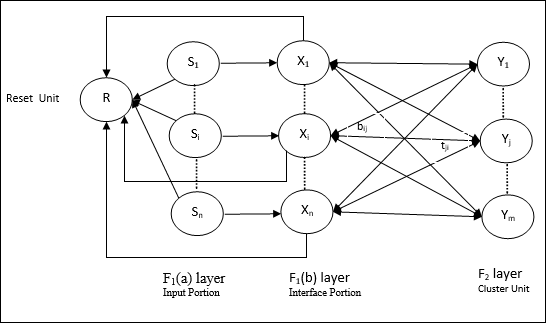
Input unit (F1 layer) - Он также имеет следующие две части -
F1(a) layer (Input portion)- В ART1 в этой части не будет обработки, а будут только входные векторы. Он подключен к слою F 1 (b) (интерфейсная часть).
F1(b) layer (Interface portion)- Эта часть объединяет сигнал входной части с сигналом слоя F 2 . Слой F 1 (b) соединен со слоем F 2 через снизу вверх грузы.bijи слой F 2 соединен со слоем F 1 (b) через грузы сверху вниз.tji.
Cluster Unit (F2 layer)- Это соревновательный слой. Для изучения шаблона ввода выбирается блок, имеющий наибольший чистый входной сигнал. Активация всех остальных кластерных блоков установлена на 0.
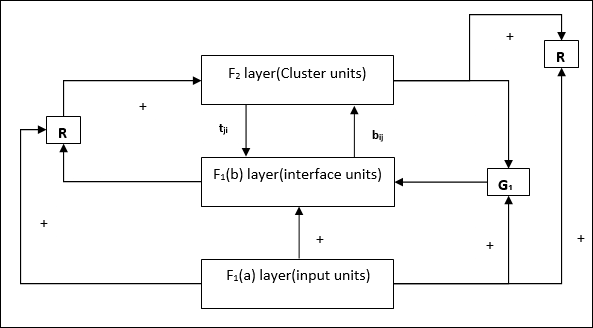
Reset Mechanism- Работа этого механизма основана на сходстве между нисходящим весом и входным вектором. Теперь, если степень этого сходства меньше, чем параметр бдительности, то кластеру не разрешается изучать паттерн, и наступает отдых.
Supplement Unit - На самом деле проблема с механизмом сброса заключается в том, что слой F2должны быть запрещены при определенных условиях, а также должны быть доступны, когда происходит некоторое обучение. Вот почему два дополнительных блока, а именно,G1 и G2 добавляется вместе с блоком сброса, R. Они называютсяgain control units. Эти устройства принимают и отправляют сигналы другим устройствам, присутствующим в сети.‘+’ указывает на возбуждающий сигнал, а ‘−’ указывает на тормозной сигнал.
Используемые параметры
Используются следующие параметры -
n - Количество компонентов во входном векторе
m - Максимальное количество кластеров, которые можно сформировать
bij- Вес от слоя F 1 (b) до слоя F 2 , то есть веса снизу вверх
tji- Вес от слоя F 2 до F 1 (b), то есть веса сверху вниз
ρ - Параметр бдительности
||x|| - Норма вектора x
Алгоритм
Step 1 - Инициализируйте скорость обучения, параметр бдительности и веса следующим образом:
$$ \ alpha \:> \: 1 \: \: и \: \: 0 \: <\ rho \: \ leq \: 1 $$
$$ 0 \: <\: b_ {ij} (0) \: <\: \ frac {\ alpha} {\ alpha \: - \: 1 \: + \: n} \: \: и \: \: t_ {ij} (0) \: = \: 1 $$
Step 2 - Продолжайте шаги 3-9, если условие остановки не выполняется.
Step 3 - Продолжайте шаги 4-6 для каждого обучающего входа.
Step 4- Задайте активации всех блоков F 1 (a) и F 1 следующим образом
F2 = 0 and F1(a) = input vectors
Step 5- Входной сигнал от F 1 (а) F 1 (б) слой должен быть послан , как
$$ s_ {i} \: = \: x_ {i} $$
Step 6- Для каждого заблокированного узла F 2
$ y_ {j} \: = \: \ sum_i b_ {ij} x_ {i} $ условие yj ≠ -1
Step 7 - Выполните шаги 8-10, когда сброс верен.
Step 8 - Найти J за yJ ≥ yj для всех узлов j
Step 9- Снова рассчитайте активацию на F 1 (b) следующим образом
$$ x_ {i} \: = \: sitJi $$
Step 10 - Теперь, посчитав норму вектора x и вектор s, нам нужно проверить условие сброса следующим образом -
Если ||x||/ ||s|| <параметр бдительности ρ, Затем запретить узел J и переходите к шагу 7
Иначе, если ||x||/ ||s|| ≥ параметр бдительности ρ, затем продолжайте.
Step 11 - Обновление веса узла J можно сделать следующим образом -
$$ b_ {ij} (новый) \: = \: \ frac {\ alpha x_ {i}} {\ alpha \: - \: 1 \: + \: || x ||} $$
$$ t_ {ij} (новый) \: = \: x_ {i} $$
Step 12 - Необходимо проверить условие остановки для алгоритма, и оно может быть следующим:
- Нет никаких изменений в весе.
- Сброс для агрегатов не выполняется.
- Достигнуто максимальное количество эпох.