Digitale Kommunikation - Kurzanleitung
Die Kommunikation, die in unserem täglichen Leben stattfindet, erfolgt in Form von Signalen. Diese Signale, wie beispielsweise Tonsignale, sind im Allgemeinen analoger Natur. Wenn die Kommunikation über eine Entfernung hergestellt werden muss, werden die analogen Signale unter Verwendung verschiedener Techniken für eine effektive Übertragung über Kabel gesendet.
Die Notwendigkeit der Digitalisierung
Die herkömmlichen Kommunikationsmethoden verwendeten analoge Signale für die Fernkommunikation, die unter vielen Verlusten wie Verzerrungen, Interferenzen und anderen Verlusten einschließlich Sicherheitsverletzungen leiden.
Um diese Probleme zu überwinden, werden die Signale unter Verwendung verschiedener Techniken digitalisiert. Die digitalisierten Signale ermöglichen eine klarere und präzisere Kommunikation ohne Verluste.
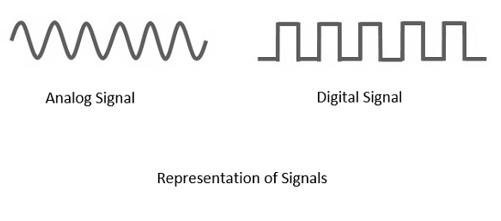
Die folgende Abbildung zeigt den Unterschied zwischen analogen und digitalen Signalen. Die digitalen Signale bestehen aus1s und 0s die hohe bzw. niedrige Werte anzeigen.
Vorteile der digitalen Kommunikation
Da die Signale digitalisiert werden, bietet die digitale Kommunikation viele Vorteile gegenüber der analogen Kommunikation, wie z.
Die Auswirkungen von Verzerrungen, Rauschen und Interferenzen sind bei digitalen Signalen viel geringer, da sie weniger betroffen sind.
Digitale Schaltungen sind zuverlässiger.
Digitale Schaltungen sind einfach zu entwerfen und billiger als analoge Schaltungen.
Die Hardware-Implementierung in digitalen Schaltkreisen ist flexibler als analog.
Das Auftreten von Übersprechen ist in der digitalen Kommunikation sehr selten.
Das Signal bleibt unverändert, da der Impuls eine hohe Störung benötigt, um seine Eigenschaften zu ändern, was sehr schwierig ist.
Signalverarbeitungsfunktionen wie Verschlüsselung und Komprimierung werden in digitalen Schaltungen verwendet, um die Geheimhaltung der Informationen aufrechtzuerhalten.
Die Wahrscheinlichkeit des Auftretens von Fehlern wird durch Verwendung von Fehlererkennungs- und Fehlerkorrekturcodes verringert.
Die Spread-Spectrum-Technik wird verwendet, um Signalstörungen zu vermeiden.
Das Kombinieren digitaler Signale mit Time Division Multiplexing (TDM) ist einfacher als das Kombinieren von analogen Signalen mit Frequency Division Multiplexing (FDM).
Die Konfiguration digitaler Signale ist einfacher als bei analogen Signalen.
Digitale Signale können bequemer gespeichert und abgerufen werden als analoge Signale.
Viele der digitalen Schaltungen weisen fast übliche Codierungstechniken auf, und daher können ähnliche Vorrichtungen für eine Reihe von Zwecken verwendet werden.
Die Kapazität des Kanals wird effektiv von digitalen Signalen genutzt.
Elemente der digitalen Kommunikation
Die Elemente, die ein digitales Kommunikationssystem bilden, werden zum leichteren Verständnis durch das folgende Blockdiagramm dargestellt.
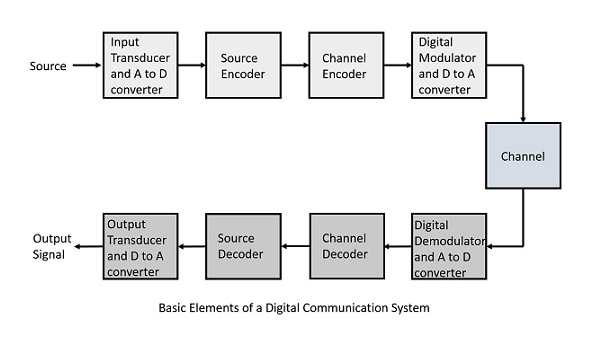
Es folgen die Abschnitte des digitalen Kommunikationssystems.
Quelle
Die Quelle kann eine sein analog Signal. Example: Ein Tonsignal
Eingangswandler
Dies ist ein Wandler, der einen physikalischen Eingang nimmt und ihn in ein elektrisches Signal umwandelt (Example: Mikrofon). Dieser Block besteht auch aus einemanalog to digital Konverter, bei dem ein digitales Signal für weitere Prozesse benötigt wird.
Ein digitales Signal wird im Allgemeinen durch eine Binärsequenz dargestellt.
Quellcodierer
Der Quellcodierer komprimiert die Daten auf eine minimale Anzahl von Bits. Dieser Prozess hilft bei der effektiven Nutzung der Bandbreite. Es entfernt die redundanten Bits (unnötige überschüssige Bits, dh Nullen).
Kanalcodierer
Der Kanalcodierer führt die Codierung für die Fehlerkorrektur durch. Während der Übertragung des Signals kann sich das Signal aufgrund des Rauschens im Kanal ändern, und um dies zu vermeiden, fügt der Kanalcodierer den übertragenen Daten einige redundante Bits hinzu. Dies sind die Fehlerkorrekturbits.
Digitaler Modulator
Das zu übertragende Signal wird hier von einem Träger moduliert. Das Signal wird auch von der digitalen Sequenz in eine analoge umgewandelt, um es durch den Kanal oder das Medium laufen zu lassen.
Kanal
Der Kanal oder ein Medium ermöglicht es dem analogen Signal, vom Senderende zum Empfängerende zu senden.
Digitaler Demodulator
Dies ist der erste Schritt auf der Empfängerseite. Das empfangene Signal wird demoduliert und wieder von analog zu digital umgewandelt. Das Signal wird hier rekonstruiert.
Kanaldecoder
Der Kanaldecoder führt nach dem Erkennen der Sequenz einige Fehlerkorrekturen durch. Die Verzerrungen, die während der Übertragung auftreten können, werden durch Hinzufügen einiger redundanter Bits korrigiert. Diese Hinzufügung von Bits hilft bei der vollständigen Wiederherstellung des ursprünglichen Signals.
Quelldecoder
Das resultierende Signal wird erneut durch Abtasten und Quantisieren digitalisiert, so dass der reine digitale Ausgang ohne Informationsverlust erhalten wird. Der Quelldecoder erstellt die Quellausgabe neu.
Ausgangswandler
Dies ist der letzte Block, der das Signal in die ursprüngliche physikalische Form umwandelt, die sich am Eingang des Senders befand. Es wandelt das elektrische Signal in eine physikalische Ausgabe um (Example: Lautsprecher).
Ausgangssignal
Dies ist die Ausgabe, die nach dem gesamten Prozess erzeugt wird. Example - Das empfangene Tonsignal.
Diese Einheit hat sich mit der Einführung, der Digitalisierung von Signalen, den Vorteilen und den Elementen der digitalen Kommunikation befasst. In den kommenden Kapiteln lernen wir die Konzepte der digitalen Kommunikation im Detail kennen.
Modulation ist der Prozess des Variierens eines oder mehrerer Parameter eines Trägersignals gemäß den Momentanwerten des Nachrichtensignals.
Das Nachrichtensignal ist das Signal, das zur Kommunikation übertragen wird, und das Trägersignal ist ein Hochfrequenzsignal, das keine Daten enthält, aber für die Fernübertragung verwendet wird.
Es gibt viele Modulationstechniken, die nach der Art der verwendeten Modulation klassifiziert werden. Von allen ist die verwendete digitale ModulationstechnikPulse Code Modulation (PCM).
Ein Signal wird impulscodemoduliert, um seine analogen Informationen in eine binäre Sequenz umzuwandeln, dh 1s und 0s. Die Ausgabe eines PCM ähnelt einer Binärsequenz. Die folgende Abbildung zeigt ein Beispiel für die PCM-Ausgabe in Bezug auf Momentanwerte einer bestimmten Sinuswelle.
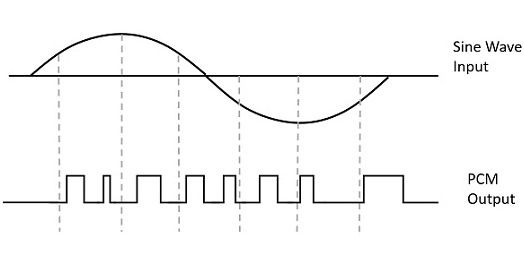
Anstelle einer Impulsfolge erzeugt PCM eine Reihe von Zahlen oder Ziffern, und daher wird dieser Prozess als bezeichnet digital. Jede dieser Ziffern repräsentiert, obwohl im Binärcode, die ungefähre Amplitude der Signalabtastung zu diesem Zeitpunkt.
Bei der Pulscodemodulation wird das Nachrichtensignal durch eine Folge von codierten Impulsen dargestellt. Dieses Nachrichtensignal wird erreicht, indem das Signal sowohl in Zeit als auch in Amplitude in diskreter Form dargestellt wird.
Grundelemente von PCM
Der Senderteil einer Pulscode-Modulatorschaltung besteht aus Sampling, Quantizing und Encoding, die im Analog-Digital-Wandler-Bereich durchgeführt werden. Das Tiefpassfilter vor dem Abtasten verhindert ein Aliasing des Nachrichtensignals.
Die Grundoperationen im Empfängerbereich sind regeneration of impaired signals, decoding, und reconstructionder quantisierten Impulsfolge. Es folgt das Blockdiagramm von PCM, das die Grundelemente sowohl des Sender- als auch des Empfängerabschnitts darstellt.
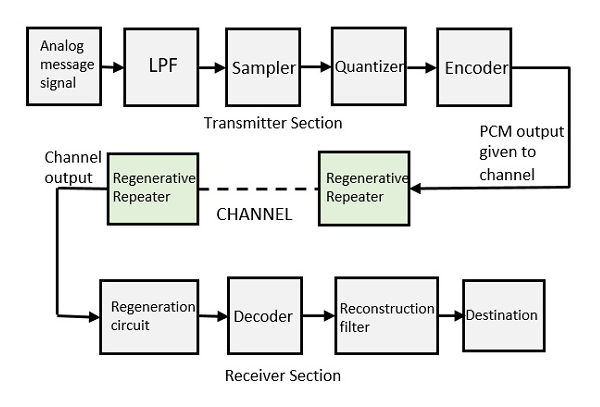
Tiefpassfilter
Dieses Filter eliminiert die im analogen Eingangssignal vorhandenen Hochfrequenzkomponenten, die größer als die höchste Frequenz des Nachrichtensignals sind, um ein Aliasing des Nachrichtensignals zu vermeiden.
Sampler
Dies ist die Technik, die hilft, die Abtastdaten bei Momentanwerten des Nachrichtensignals zu sammeln, um das ursprüngliche Signal zu rekonstruieren. Die Abtastrate muss größer als das Doppelte der höchsten Frequenzkomponente seinW des Nachrichtensignals gemäß dem Abtasttheorem.
Quantisierer
Beim Quantisieren werden die übermäßigen Bits reduziert und die Daten begrenzt. Die abgetastete Ausgabe an Quantizer reduziert die redundanten Bits und komprimiert den Wert.
Encoder
Die Digitalisierung des analogen Signals erfolgt durch den Encoder. Es bezeichnet jede quantisierte Ebene durch einen Binärcode. Die hier durchgeführte Abtastung ist der Sample-and-Hold-Prozess. Diese drei Abschnitte (LPF, Sampler und Quantizer) fungieren als Analog-Digital-Wandler. Durch die Codierung wird die verwendete Bandbreite minimiert.
Regenerativer Repeater
Dieser Abschnitt erhöht die Signalstärke. Der Ausgang des Kanals hat auch eine regenerative Repeater-Schaltung, um den Signalverlust zu kompensieren und das Signal zu rekonstruieren sowie seine Stärke zu erhöhen.
Decoder
Die Decodiererschaltung decodiert die pulscodierte Wellenform, um das ursprüngliche Signal zu reproduzieren. Diese Schaltung fungiert als Demodulator.
Rekonstruktionsfilter
Nachdem die Digital-Analog-Wandlung von der Regenerationsschaltung und dem Decodierer durchgeführt wurde, wird ein Tiefpassfilter verwendet, das als Rekonstruktionsfilter bezeichnet wird, um das ursprüngliche Signal zurückzugewinnen.
Daher digitalisiert die Pulscode-Modulatorschaltung das gegebene analoge Signal, codiert es und tastet es ab und überträgt es dann in einer analogen Form. Dieser gesamte Vorgang wird in umgekehrter Reihenfolge wiederholt, um das ursprüngliche Signal zu erhalten.
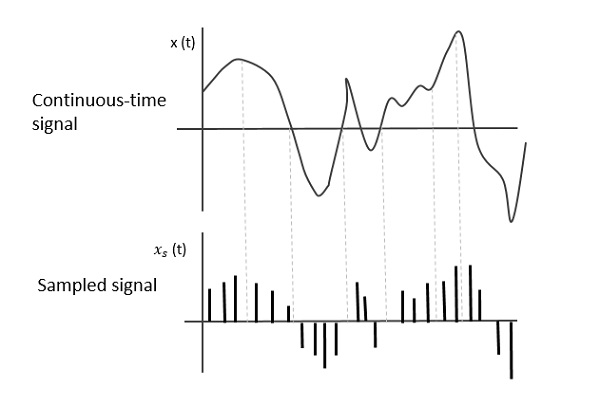
Sampling ist definiert als: "Der Prozess des Messens der Momentanwerte des zeitkontinuierlichen Signals in einer diskreten Form."
Sample ist ein Datenelement aus den gesamten Daten, das im Zeitbereich kontinuierlich ist.
Wenn eine Quelle ein analoges Signal erzeugt und wenn dieses digitalisiert werden muss, mit 1s und 0sdh hoch oder niedrig, das Signal muss rechtzeitig diskretisiert werden. Diese Diskretisierung des analogen Signals wird als Sampling bezeichnet.
Die folgende Abbildung zeigt ein zeitkontinuierliches Signal x (t) und ein abgetastetes Signal xs (t). Wannx (t) wird mit einer periodischen Impulsfolge multipliziert, dem abgetasteten Signal xs (t) erhalten wird.
Abtastrate
Um die Signale zu diskretisieren, sollte der Abstand zwischen den Abtastwerten festgelegt werden. Diese Lücke kann als bezeichnet werdensampling period Ts.
$$ Sampling \: Frequenz = \ frac {1} {T_ {s}} = f_s $$
Wo,
$ T_s $ ist die Abtastzeit
$ f_s $ ist die Abtastfrequenz oder die Abtastrate
Sampling frequencyist der Kehrwert der Abtastperiode. Diese Abtastfrequenz kann einfach als bezeichnet werdenSampling rate. Die Abtastrate gibt die Anzahl der Abtastungen pro Sekunde oder für einen endlichen Satz von Werten an.
Damit ein analoges Signal aus dem digitalisierten Signal rekonstruiert werden kann, sollte die Abtastrate stark berücksichtigt werden. Die Abtastrate sollte so sein, dass die Daten im Nachrichtensignal weder verloren gehen noch überlappen. Daher wurde hierfür eine Rate festgelegt, die als Nyquist-Rate bezeichnet wird.
Nyquist Rate
Angenommen, ein Signal ist bandbegrenzt und weist keine höheren Frequenzkomponenten als auf WHertz. Das bedeutet,Wist die höchste Frequenz. Für ein solches Signal sollte für eine effektive Wiedergabe des ursprünglichen Signals die Abtastrate doppelt so hoch sein wie die höchste Frequenz.
Was bedeutet,
$$ f_S = 2W $$
Wo,
$ f_S $ ist die Abtastrate
W ist die höchste Frequenz
Diese Abtastrate wird als bezeichnet Nyquist rate.
Über die Theorie dieser Nyquist-Rate wurde ein Satz namens Sampling Theorem aufgestellt.
Abtasttheorem
Der Abtastsatz, der auch als bezeichnet wird Nyquist theoremliefert die Theorie einer ausreichenden Abtastrate in Bezug auf die Bandbreite für die Klasse von Funktionen, die bandbegrenzt sind.
Der Abtastsatz besagt: „Ein Signal kann exakt reproduziert werden, wenn es mit der Rate abgetastet wird fs Das ist mehr als das Doppelte der maximalen Frequenz W. ”
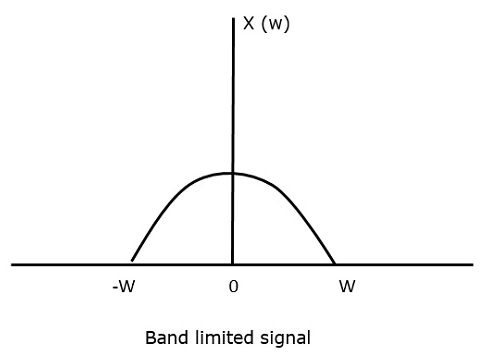
Um diesen Abtastsatz zu verstehen, betrachten wir ein bandbegrenztes Signal, dh ein Signal, dessen Wert ist non-zero zwischen einigen –W und W Hertz.
Ein solches Signal wird dargestellt als $ x (f) = 0 \: für \: \ mid f \ mid> W $
Für das zeitkontinuierliche Signal x (t)Das bandbegrenzte Signal im Frequenzbereich kann wie in der folgenden Abbildung dargestellt dargestellt werden.
Wir brauchen eine Abtastfrequenz, eine Frequenz, bei der auch nach der Abtastung kein Informationsverlust auftreten sollte. Dafür haben wir die Nyquist-Rate, dass die Abtastfrequenz das Zweifache der Maximalfrequenz betragen sollte. Dies ist die kritische Abtastrate.
Wenn das Signal x(t) Wird oberhalb der Nyquist-Rate abgetastet, kann das ursprüngliche Signal wiederhergestellt werden, und wenn es unterhalb der Nyquist-Rate abgetastet wird, kann das Signal nicht wiederhergestellt werden.
Die folgende Abbildung erläutert ein Signal, wenn es mit einer höheren Rate als abgetastet wird 2w im Frequenzbereich.
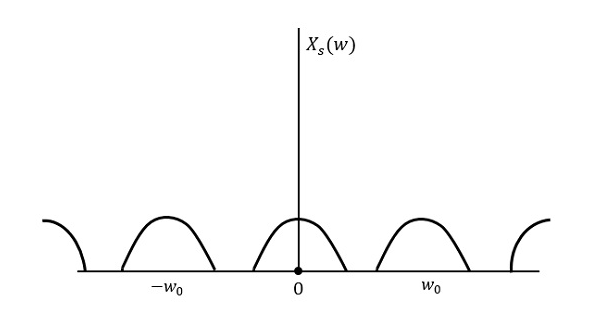
Die obige Abbildung zeigt die Fourier-Transformation eines Signals xs (t). Hier werden die Informationen ohne Verlust reproduziert. Es gibt keine Verwechslung und daher ist eine Rückgewinnung möglich.
Die Fourier-Transformation des Signals xs (t) ist
$$ X_s (w) = \ frac {1} {T_ {s}} \ sum_ {n = - \ infty} ^ \ infty X (w-nw_0) $$
Wobei $ T_s $ = Sampling Period und $ w_0 = \ frac {2 \ pi} {T_s} $
Lassen Sie uns sehen, was passiert, wenn die Abtastrate doppelt so hoch ist wie die höchste Frequenz (2W)
Das bedeutet,
$$ f_s = 2W $$
Wo,
$ f_s $ ist die Abtastfrequenz
W ist die höchste Frequenz
Das Ergebnis ist wie in der obigen Abbildung gezeigt. Die Informationen werden ohne Verlust ersetzt. Daher ist dies auch eine gute Abtastrate.
Betrachten wir nun den Zustand.
$$ f_s <2W $$
Das resultierende Muster sieht wie in der folgenden Abbildung aus.

Anhand des obigen Musters können wir beobachten, dass das Überlappen von Informationen erfolgt, was zu Verwechslungen und Informationsverlust führt. Dieses unerwünschte Phänomen des Überlappens wird als Aliasing bezeichnet.
Aliasing
Aliasing kann als "das Phänomen einer Hochfrequenzkomponente im Spektrum eines Signals bezeichnet werden, das die Identität einer Niederfrequenzkomponente im Spektrum seiner abgetasteten Version annimmt".
Die Korrekturmaßnahmen zur Verringerung der Auswirkung von Aliasing sind:
Im Senderbereich von PCM a low pass anti-aliasing filter wird vor dem Abtastgerät eingesetzt, um die unerwünschten Hochfrequenzkomponenten zu beseitigen.
Das Signal, das nach dem Filtern abgetastet wird, wird mit einer Rate abgetastet, die geringfügig höher als die Nyquist-Rate ist.
Diese Wahl, die Abtastrate höher als die Nyquist-Rate zu haben, hilft auch bei der einfacheren Gestaltung des reconstruction filter am Empfänger.
Umfang der Fourier-Transformation
Es wird allgemein beobachtet, dass wir die Hilfe von Fourier-Reihen und Fourier-Transformationen bei der Analyse der Signale und auch beim Beweis von Theoremen suchen. Es ist, weil -
Die Fourier-Transformation ist die Erweiterung der Fourier-Reihe für nichtperiodische Signale.
Die Fourier-Transformation ist ein leistungsstarkes mathematisches Werkzeug, mit dem die Signale in verschiedenen Bereichen angezeigt und die Signale einfach analysiert werden können.
Mit dieser Fourier-Transformation kann jedes Signal in Form der Summe von Sinus und Cosinus zerlegt werden.
Lassen Sie uns im nächsten Kapitel das Konzept der Quantisierung diskutieren.
Bei der Digitalisierung von Analogsignalen werden die Werte abgerundet, die in etwa den Analogwerten entsprechen. Bei der Abtastmethode werden einige Punkte des Analogsignals ausgewählt, und diese Punkte werden zusammengefügt, um den Wert auf einen nahezu stabilisierten Wert abzurunden. Ein solcher Prozess wird als bezeichnetQuantization.
Quantisierung eines analogen Signals
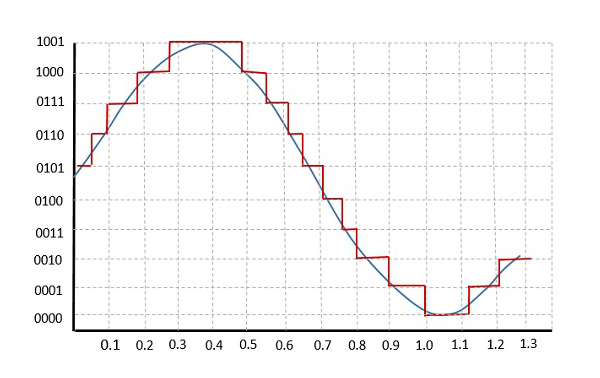
Die Analog-Digital-Wandler führen diese Art von Funktion aus, um aus dem gegebenen analogen Signal eine Reihe digitaler Werte zu erzeugen. Die folgende Abbildung zeigt ein analoges Signal. Dieses Signal muss abgetastet und quantisiert werden, um in digital umgewandelt zu werden.
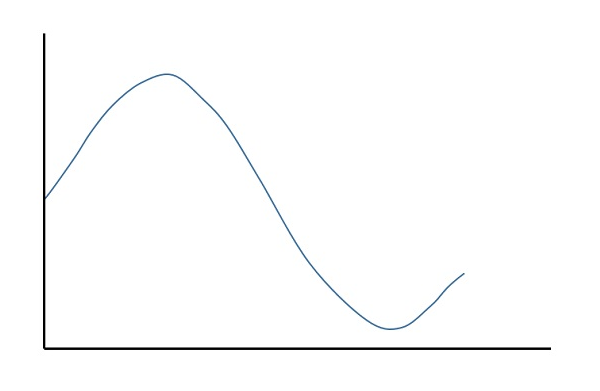
Die Quantisierung eines analogen Signals erfolgt durch Diskretisierung des Signals mit einer Anzahl von Quantisierungspegeln. Quantization stellt die abgetasteten Werte der Amplitude durch einen endlichen Satz von Pegeln dar, was bedeutet, dass ein Abtastwert mit kontinuierlicher Amplitude in ein zeitdiskretes Signal umgewandelt wird.
Die folgende Abbildung zeigt, wie ein analoges Signal quantisiert wird. Die blaue Linie repräsentiert das analoge Signal, während die braune das quantisierte Signal repräsentiert.
Sowohl die Abtastung als auch die Quantisierung führen zum Informationsverlust. Die Qualität einer Quantisiererausgabe hängt von der Anzahl der verwendeten Quantisierungsstufen ab. Die diskreten Amplituden des quantisierten Ausgangs werden als bezeichnetrepresentation levels oder reconstruction levels. Der Abstand zwischen den beiden benachbarten Darstellungsebenen wird als a bezeichnetquantum oder step-size.
Die folgende Abbildung zeigt das resultierende quantisierte Signal, das die digitale Form für das gegebene analoge Signal darstellt.
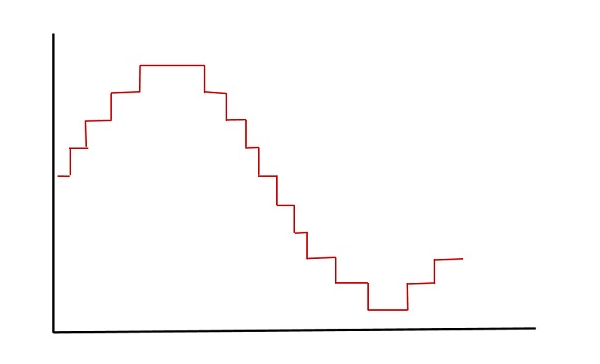
Dies wird auch als bezeichnet Stair-case Wellenform entsprechend ihrer Form.
Arten der Quantisierung
Es gibt zwei Arten der Quantisierung - die einheitliche Quantisierung und die ungleichmäßige Quantisierung.
Die Art der Quantisierung, bei der die Quantisierungspegel gleichmäßig verteilt sind, wird als a bezeichnet Uniform Quantization. Die Art der Quantisierung, bei der die Quantisierungsniveaus ungleich sind und die Beziehung zwischen ihnen meist logarithmisch ist, wird als a bezeichnetNon-uniform Quantization.
Es gibt zwei Arten der einheitlichen Quantisierung. Sie sind vom Typ Mid-Rise und Mid-Tread. Die folgenden Abbildungen zeigen die beiden Arten der einheitlichen Quantisierung.
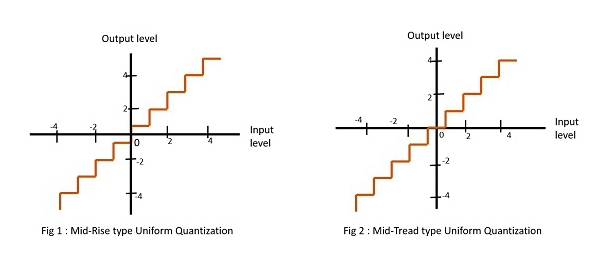
1 zeigt den Mid-Rise-Typ und 2 zeigt den Mid-Tread-Typ der einheitlichen Quantisierung.
Das Mid-RiseTyp wird so genannt, weil der Ursprung in der Mitte eines ansteigenden Teils des treppenartigen Graphen liegt. Die Quantisierungsstufen bei diesem Typ sind gerade.
Das Mid-treadTyp wird so genannt, weil der Ursprung in der Mitte eines Schrittes des treppenartigen Graphen liegt. Die Quantisierungspegel in diesem Typ sind ungerade.
Sowohl der Typ des mittleren Anstiegs als auch des mittleren Profils gleichförmiger Quantisierer sind symmetrisch zum Ursprung.
Quantisierungsfehler
Für jedes System gibt es während seiner Funktion immer einen Unterschied in den Werten seiner Ein- und Ausgabe. Die Verarbeitung des Systems führt zu einem Fehler, der die Differenz dieser Werte darstellt.
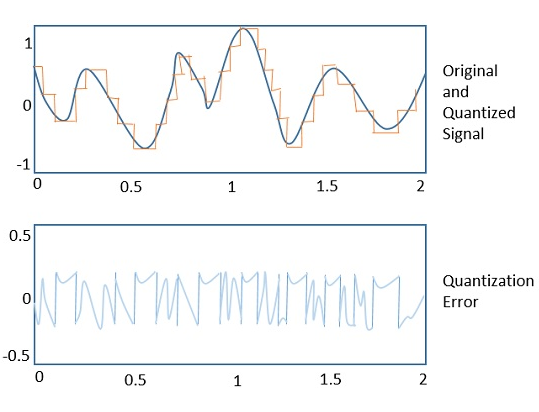
Die Differenz zwischen einem Eingabewert und seinem quantisierten Wert wird als a bezeichnet Quantization Error. EINQuantizerist eine logarithmische Funktion, die eine Quantisierung durchführt (Abrundung des Wertes). Ein Analog-Digital-Wandler (ADC) arbeitet als Quantisierer.
Die folgende Abbildung zeigt ein Beispiel für einen Quantisierungsfehler, der den Unterschied zwischen dem ursprünglichen Signal und dem quantisierten Signal angibt.
Quantisierungsrauschen
Es handelt sich um eine Art Quantisierungsfehler, der normalerweise im analogen Audiosignal auftritt, während es in digital quantisiert wird. Beispielsweise ändern sich in der Musik die Signale ständig, wobei bei Fehlern keine Regelmäßigkeit gefunden wird. Solche Fehler erzeugen ein Breitbandrauschen, das als bezeichnet wirdQuantization Noise.
Kompandieren in PCM
Das Wort Compandingist eine Kombination aus Komprimieren und Erweitern, was bedeutet, dass beides möglich ist. Dies ist eine nichtlineare Technik, die in PCM verwendet wird und die Daten am Sender komprimiert und dieselben Daten am Empfänger erweitert. Die Auswirkungen von Rauschen und Übersprechen werden durch diese Technik verringert.
Es gibt zwei Arten von Companding-Techniken. Sie sind -
A-Law Companding-Technik
Eine gleichmäßige Quantisierung wird bei erreicht A = 1, wo die Kennlinie linear ist und keine Komprimierung erfolgt.
A-Law hat am Ursprung einen mittleren Aufstieg. Daher enthält es einen Wert ungleich Null.
A-Law-Kompandierung wird für PCM-Telefonsysteme verwendet.
µ-Gesetz-Kompandierungstechnik
Eine gleichmäßige Quantisierung wird bei erreicht µ = 0, wo die Kennlinie linear ist und keine Komprimierung erfolgt.
µ-Law hat am Ursprung eine mittlere Lauffläche. Daher enthält es einen Nullwert.
Die µ-Law-Kompandierung wird für Sprach- und Musiksignale verwendet.
µ-Gesetz wird in Nordamerika und Japan verwendet.
Lassen Sie für die Proben, die stark korreliert sind, redundante Informationen zurück, wenn sie mit der PCM-Technik codiert werden. Um diese redundanten Informationen zu verarbeiten und eine bessere Ausgabe zu erzielen, ist es eine kluge Entscheidung, einen vorhergesagten Abtastwert, der von seiner vorherigen Ausgabe angenommen wurde, zu nehmen und ihn mit den quantisierten Werten zusammenzufassen. Ein solcher Prozess wird als bezeichnetDifferential PCM (DPCM) Technik.
DPCM-Sender
Der DPCM-Sender besteht aus Quantizer und Predictor mit zwei Sommerschaltungen. Es folgt das Blockschaltbild des DPCM-Senders.
Die Signale an jedem Punkt heißen -
$ x (nT_s) $ ist die abgetastete Eingabe
$ \ widehat {x} (nT_s) $ ist die vorhergesagte Stichprobe
$ e (nT_s) $ ist die Differenz zwischen abgetasteter Eingabe und vorhergesagter Ausgabe, die oft als Vorhersagefehler bezeichnet wird
$ v (nT_s) $ ist die quantisierte Ausgabe
$ u (nT_s) $ ist die Prädiktoreingabe, die tatsächlich die Sommerausgabe der Prädiktorausgabe und der Quantisiererausgabe ist
Der Prädiktor erzeugt die angenommenen Abtastwerte aus den vorherigen Ausgängen der Senderschaltung. Die Eingabe für diesen Prädiktor sind die quantisierten Versionen des Eingangssignals $ x (nT_s) $.
Die Quantisiererausgabe wird dargestellt als -
$$ v (nT_s) = Q [e (nT_s)] $$
$ = e (nT_s) + q (nT_s) $
Wo q (nTs) ist der Quantisierungsfehler
Die Prädiktoreingabe ist die Summe aus Quantisiererausgabe und Prädiktorausgabe.
$$ u (nT_s) = \ widehat {x} (nT_s) + v (nT_s) $$
$ u (nT_s) = \ widehat {x} (nT_s) + e (nT_s) + q (nT_s) $
$$ u (nT_s) = x (nT_s) + q (nT_s) $$
Dieselbe Prädiktorschaltung wird im Decoder verwendet, um den ursprünglichen Eingang zu rekonstruieren.
DPCM-Empfänger
Das Blockdiagramm des DPCM-Empfängers besteht aus einem Decoder, einem Prädiktor und einer Sommerschaltung. Es folgt das Diagramm des DPCM-Empfängers.

Die Notation der Signale ist die gleiche wie bei den vorherigen. Wenn kein Rauschen auftritt, ist der codierte Empfängereingang derselbe wie der codierte Senderausgang.
Wie bereits erwähnt, nimmt der Prädiktor einen Wert an, der auf den vorherigen Ausgaben basiert. Die dem Decoder gegebene Eingabe wird verarbeitet und diese Ausgabe wird mit der Ausgabe des Prädiktors summiert, um eine bessere Ausgabe zu erhalten.
Die Abtastrate eines Signals sollte höher sein als die Nyquist-Rate, um eine bessere Abtastung zu erzielen. Wenn dieses Abtastintervall in Differential PCM erheblich reduziert wird, ist die Amplitudendifferenz zwischen Abtastung und Abtastung sehr klein, als ob die Differenz gleich wäre1-bit quantization, dann wird die Schrittgröße sehr klein sein, dh Δ (Delta).
Delta-Modulation
Die Art der Modulation, bei der die Abtastrate viel höher ist und bei der die Schrittweite nach der Quantisierung einen kleineren Wert hat Δwird eine solche Modulation als bezeichnet delta modulation.
Merkmale der Delta-Modulation
Im Folgenden sind einige der Merkmale der Delta-Modulation aufgeführt.
Ein überabgetasteter Eingang wird verwendet, um die Signalkorrelation vollständig zu nutzen.
Das Quantisierungsdesign ist einfach.
Die Eingabesequenz ist viel höher als die Nyquist-Rate.
Die Qualität ist mäßig.
Das Design des Modulators und des Demodulators ist einfach.
Die Treppenhausnäherung der Ausgangswellenform.
Die Schrittgröße ist sehr klein, dh Δ (Delta).
Die Bitrate kann vom Benutzer festgelegt werden.
Dies beinhaltet eine einfachere Implementierung.
Delta Modulation ist eine vereinfachte Form der DPCM-Technik, die auch als angesehen wird 1-bit DPCM scheme. Wenn das Abtastintervall verringert wird, ist die Signalkorrelation höher.
Delta Modulator
Der Delta-Modulator besteht aus einem 1-Bit-Quantisierer und einer Verzögerungsschaltung sowie zwei Sommerschaltungen. Es folgt das Blockschaltbild eines Delta-Modulators.
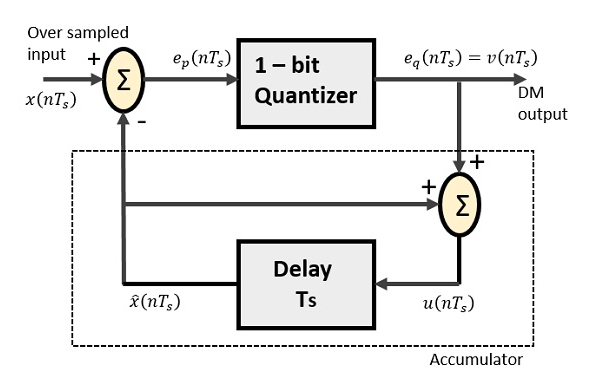
Die Prädiktorschaltung in DPCM wird durch eine einfache Verzögerungsschaltung in DM ersetzt.
Aus dem obigen Diagramm haben wir die Notationen als -
$ x (nT_s) $ = überabgetastete Eingabe
$ e_p (nT_s) $ = Sommerausgabe und Quantisierereingabe
$ e_q (nT_s) $ = Quantisiererausgabe = $ v (nT_s) $
$ \ widehat {x} (nT_s) $ = Ausgang der Verzögerungsschaltung
$ u (nT_s) $ = Eingang der Verzögerungsschaltung
Mit diesen Notationen werden wir nun versuchen, den Prozess der Delta-Modulation herauszufinden.
$ e_p (nT_s) = x (nT_s) - \ widehat {x} (nT_s) $
--------- Gleichung 1
$ = x (nT_s) - u ([n - 1] T_s) $
$ = x (nT_s) - [\ widehat {x} [[n - 1] T_s] + v [[n-1] T_s]] $
--------- Gleichung 2
Des Weiteren,
$ v (nT_s) = e_q (nT_s) = S.sig. [e_p (nT_s)] $
--------- Gleichung 3
$ u (nT_s) = \ widehat {x} (nT_s) + e_q (nT_s) $
Wo,
$ \ widehat {x} (nT_s) $ = der vorherige Wert der Verzögerungsschaltung
$ e_q (nT_s) $ = Quantisiererausgabe = $ v (nT_s) $
Daher,
$ u (nT_s) = u ([n-1] T_s) + v (nT_s) $
--------- Gleichung 4
Was bedeutet,
The present input of the delay unit
= (The previous output of the delay unit) + (the present quantizer output)
Unter der Annahme einer Null-Akkumulationsbedingung,
$ u (nT_s) = S \ Anzeigestil \ Summe \ Grenzen_ {j = 1} ^ n sig [e_p (jT_s)] $
Accumulated version of DM output = $ \ displaystyle \ sum \ limit_ {j = 1} ^ nv (jT_s) $
--------- Gleichung 5
Beachten Sie das jetzt
$ \ widehat {x} (nT_s) = u ([n-1] T_s) $
$ = \ displaystyle \ sum \ limit_ {j = 1} ^ {n - 1} v (jT_s) $
--------- Gleichung 6
Der Ausgang der Verzögerungseinheit ist ein Akkumulatorausgang, der um einen Abtastwert zurückliegt.
Aus den Gleichungen 5 und 6 erhalten wir eine mögliche Struktur für den Demodulator.
Eine im Treppenfall angenäherte Wellenform ist der Ausgang des Delta-Modulators mit der Schrittgröße Delta (Δ). Die Ausgabequalität der Wellenform ist moderat.
Delta Demodulator
Der Delta-Demodulator besteht aus einem Tiefpassfilter, einem Sommer- und einer Verzögerungsschaltung. Die Prädiktorschaltung wird hier eliminiert und daher wird dem Demodulator keine angenommene Eingabe gegeben.
Es folgt das Diagramm für den Delta-Demodulator.
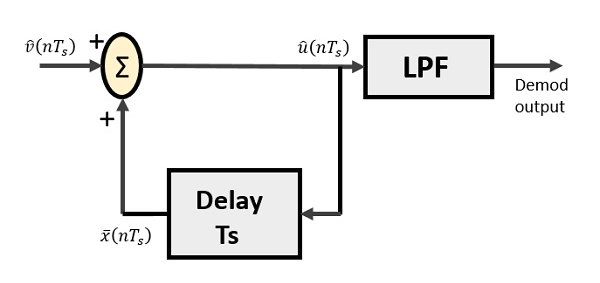
Aus dem obigen Diagramm haben wir die Notationen als -
$ \ widehat {v} (nT_s) $ ist das Eingabebeispiel
$ \ widehat {u} (nT_s) $ ist die Sommerausgabe
$ \ bar {x} (nT_s) $ ist die verzögerte Ausgabe
Eine Binärsequenz wird als Eingabe für den Demodulator angegeben. Die vom Treppenhaus angenäherte Leistung wird an den LPF übergeben.
Das Tiefpassfilter wird aus vielen Gründen verwendet, aber der Hauptgrund ist die Rauschunterdrückung für Außerbandsignale. Der Schrittgrößenfehler, der am Sender auftreten kann, wird aufgerufengranular noise, die hier beseitigt wird. Wenn kein Rauschen vorhanden ist, entspricht der Modulatorausgang dem Demodulatoreingang.
Vorteile von DM gegenüber DPCM
1-Bit-Quantisierer
Sehr einfaches Design des Modulators und des Demodulators
Es gibt jedoch etwas Rauschen in DM.
Steigung Überlastverzerrung (wenn Δ ist klein)
Körniges Geräusch (wenn Δ ist groß)
Adaptive Delta Modulation (ADM)
Bei der digitalen Modulation sind wir auf ein bestimmtes Problem bei der Bestimmung der Schrittgröße gestoßen, das die Qualität der Ausgangswelle beeinflusst.
Eine größere Schrittgröße wird für die steile Steigung des Modulationssignals benötigt, und eine kleinere Schrittgröße wird benötigt, wenn die Nachricht eine kleine Steigung aufweist. Die winzigen Details werden dabei übersehen. Es wäre also besser, wenn wir die Anpassung der Schrittgröße gemäß unserer Anforderung steuern könnten, um die Abtastung auf die gewünschte Weise zu erhalten. Dies ist das Konzept vonAdaptive Delta Modulation.
Es folgt das Blockschaltbild des adaptiven Delta-Modulators.
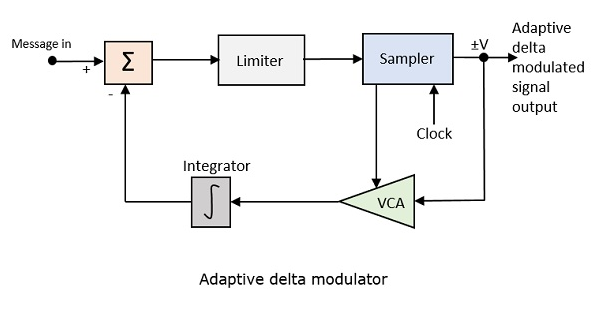
Die Verstärkung des spannungsgesteuerten Verstärkers wird durch das Ausgangssignal vom Sampler eingestellt. Die Verstärkung des Verstärkers bestimmt die Schrittgröße und beide sind proportional.
ADM quantisiert die Differenz zwischen dem Wert der aktuellen Stichprobe und dem vorhergesagten Wert der nächsten Stichprobe. Es verwendet eine variable Stufenhöhe, um die nächsten Werte vorherzusagen und die sich schnell ändernden Werte originalgetreu wiederzugeben.
Es gibt einige Techniken, die den grundlegenden Weg zu digitalen Kommunikationsprozessen geebnet haben. Damit die Signale digitalisiert werden können, verfügen wir über die Abtast- und Quantisierungstechniken.
Damit sie mathematisch dargestellt werden können, verfügen wir über LPC- und digitale Multiplextechniken. Diese digitalen Modulationstechniken werden weiter diskutiert.
Lineare prädiktive Codierung
Linear Predictive Coding (LPC)ist ein Werkzeug, das digitale Sprachsignale in einem linearen Vorhersagemodell darstellt. Dies wird hauptsächlich in der Audiosignalverarbeitung, Sprachsynthese, Spracherkennung usw. verwendet.
Die lineare Vorhersage basiert auf der Idee, dass die aktuelle Stichprobe auf der linearen Kombination früherer Stichproben basiert. Die Analyse schätzt die Werte eines zeitdiskreten Signals als lineare Funktion der vorherigen Proben.
Die Spektralhüllkurve wird unter Verwendung der Informationen des linearen Vorhersagemodells in komprimierter Form dargestellt. Dies kann mathematisch dargestellt werden als -
$ s (n) = \ displaystyle \ sum \ limit_ {k = 1} ^ p \ alpha_k s (n - k) $ für einen Wert von p und αk
Wo
s(n) ist das aktuelle Sprachbeispiel
k ist eine bestimmte Probe
p ist der aktuellste Wert
αk ist der Prädiktor-Koeffizient
s(n - k) ist das vorherige Sprachbeispiel
Für LPC werden die Prädiktor-Koeffizientenwerte bestimmt, indem die Summe der quadratischen Differenzen (über ein endliches Intervall) zwischen den tatsächlichen Sprachabtastwerten und den linear vorhergesagten minimiert wird.
Dies ist eine sehr nützliche Methode für encoding speechmit einer niedrigen Bitrate. Die LPC-Methode ist sehr nah an derFast Fourier Transform (FFT) Methode.
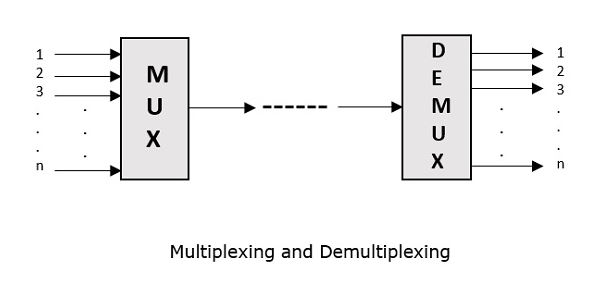
Multiplexing
Multiplexingist der Prozess des Kombinierens mehrerer Signale zu einem Signal über ein gemeinsam genutztes Medium. Wenn diese Signale analoger Natur sind, wird der Prozess als bezeichnetanalog multiplexing. Wenn digitale Signale gemultiplext werden, wird dies als bezeichnetdigital multiplexing.
Multiplexing wurde zuerst in der Telefonie entwickelt. Eine Anzahl von Signalen wurde kombiniert, um über ein einziges Kabel zu senden. Der Multiplexprozess unterteilt einen Kommunikationskanal in mehrere logische Kanäle, wobei jedem ein anderes Nachrichtensignal oder ein zu übertragender Datenstrom zugewiesen wird. Das Gerät, das Multiplexing ausführt, kann als bezeichnet werdenMUX. Der umgekehrte Vorgang, dh das Extrahieren der Anzahl von Kanälen aus einem, der am Empfänger ausgeführt wird, wird als bezeichnetde-multiplexing. Das Gerät, das das Demultiplexen durchführt, wird als bezeichnetDEMUX.
Die folgenden Abbildungen zeigen MUX und DEMUX. Ihre Hauptanwendung liegt im Bereich der Kommunikation.
Arten von Multiplexern
Es gibt hauptsächlich zwei Arten von Multiplexern, nämlich analoge und digitale. Sie sind weiter unterteilt in FDM, WDM und TDM. Die folgende Abbildung gibt einen detaillierten Überblick über diese Klassifizierung.
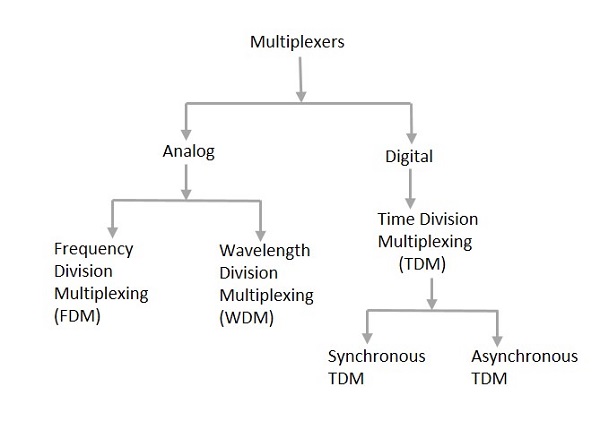
Tatsächlich gibt es viele Arten von Multiplextechniken. Von allen haben wir die Haupttypen mit allgemeiner Klassifizierung, die in der obigen Abbildung erwähnt werden.
Analoges Multiplexen
Die analogen Multiplextechniken umfassen Signale, die analoger Natur sind. Die analogen Signale werden entsprechend ihrer Frequenz (FDM) oder Wellenlänge (WDM) gemultiplext.
Frequenzmultiplex (FDM)
Beim analogen Multiplexen ist die am häufigsten verwendete Technik Frequency Division Multiplexing (FDM). Diese Technik verwendet verschiedene Frequenzen, um Datenströme zu kombinieren und auf einem Kommunikationsmedium als ein einziges Signal zu senden.
Example - Ein herkömmlicher Fernsehsender, der mehrere Kanäle über ein einziges Kabel sendet, verwendet FDM.
Wellenlängenmultiplex (WDM)
Das Wellenlängenmultiplex ist eine analoge Technik, bei der viele Datenströme unterschiedlicher Wellenlängen im Lichtspektrum übertragen werden. Wenn die Wellenlänge zunimmt, nimmt die Frequenz des Signals ab. EINprism die verschiedene Wellenlängen in eine einzige Linie verwandeln kann, kann am Ausgang von MUX und am Eingang von DEMUX verwendet werden.
Example - Die Glasfaserkommunikation verwendet die WDM-Technik, um verschiedene Wellenlängen für die Kommunikation zu einem einzigen Licht zusammenzuführen.
Digitales Multiplexing
Der Begriff digital repräsentiert die diskreten Informationsbits. Daher liegen die verfügbaren Daten in Form von Rahmen oder Paketen vor, die diskret sind.
Zeitmultiplex (TDM)
In TDM ist der Zeitrahmen in Slots unterteilt. Diese Technik wird verwendet, um ein Signal über einen einzelnen Kommunikationskanal zu übertragen, indem für jede Nachricht ein Steckplatz zugewiesen wird.
Von allen TDM-Typen sind die wichtigsten synchrones und asynchrones TDM.
Synchrones TDM
In Synchronous TDM ist der Eingang mit einem Frame verbunden. Wenn es gibt 'n'Anzahl der Verbindungen, dann wird der Rahmen unterteilt in'n' Zeitfenster. Jeder Eingangsleitung ist ein Steckplatz zugeordnet.
Bei dieser Technik ist die Abtastrate allen Signalen gemeinsam und daher wird der gleiche Takteingang gegeben. Der MUX weist jedem Gerät jederzeit den gleichen Steckplatz zu.
Asynchrones TDM
In asynchronem TDM ist die Abtastrate für jedes der Signale unterschiedlich und ein gemeinsamer Takt ist nicht erforderlich. Wenn das zugewiesene Gerät für einen Zeitschlitz nichts überträgt und sich im Leerlauf befindet, wird dieser Steckplatz im Gegensatz zu synchron einem anderen Gerät zugewiesen. Dieser TDM-Typ wird in Netzwerken im asynchronen Übertragungsmodus verwendet.
Regenerativer Repeater
Damit ein Kommunikationssystem zuverlässig ist, sollte es die Signale effektiv und verlustfrei senden und empfangen. Eine PCM-Welle wird nach dem Senden durch einen Kanal aufgrund des durch den Kanal eingebrachten Rauschens verzerrt.
Der regenerative Impuls im Vergleich zum ursprünglichen und empfangenen Impuls entspricht der folgenden Abbildung.

Zur besseren Wiedergabe des Signals wird eine Schaltung mit der Bezeichnung regenerative repeaterwird im Pfad vor dem Empfänger eingesetzt. Dies hilft bei der Wiederherstellung der Signale aus den aufgetretenen Verlusten. Es folgt die schematische Darstellung.
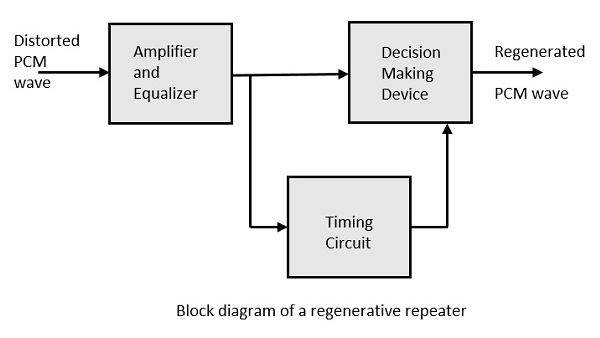
Dies besteht aus einem Equalizer zusammen mit einem Verstärker, einer Zeitschaltung und einer Entscheidungsvorrichtung. Ihre Arbeitsweise für jede der Komponenten wird wie folgt detailliert beschrieben.
Equalizer
Der Kanal erzeugt Amplituden- und Phasenverzerrungen der Signale. Dies ist auf die Übertragungseigenschaften des Kanals zurückzuführen. Die Equalizer-Schaltung kompensiert diese Verluste durch Formen der empfangenen Impulse.
Timing-Schaltung
Um eine Qualitätsausgabe zu erhalten, sollte die Abtastung der Impulse dort erfolgen, wo das Signal-Rausch-Verhältnis (SNR) maximal ist. Um diese perfekte Abtastung zu erreichen, muss aus den empfangenen Impulsen eine periodische Impulsfolge abgeleitet werden, die von der Zeitschaltung ausgeführt wird.
Daher teilt die Zeitschaltung das Zeitintervall für die Abtastung bei hohem SNR durch die empfangenen Impulse zu.
Entscheidungsgerät
Die Zeitschaltung bestimmt die Abtastzeiten. Das Entscheidungsgerät ist zu diesen Abtastzeiten aktiviert. Die Entscheidungsvorrichtung entscheidet ihre Ausgabe basierend darauf, ob die Amplitude des quantisierten Impulses und des Rauschens einen vorbestimmten Wert überschreitet oder nicht.
Dies sind nur einige der Techniken, die in der digitalen Kommunikation verwendet werden. Es müssen andere wichtige Techniken gelernt werden, die als Datencodierungstechniken bezeichnet werden. Lassen Sie uns in den folgenden Kapiteln mehr darüber erfahren, nachdem wir uns die Zeilencodes angesehen haben.
EIN line codeist der Code, der für die Datenübertragung eines digitalen Signals über eine Übertragungsleitung verwendet wird. Dieser Codierungsprozess wird so gewählt, dass eine Überlappung und Verzerrung des Signals wie Interferenz zwischen Symbolen vermieden wird.
Eigenschaften der Liniencodierung
Im Folgenden sind die Eigenschaften der Zeilencodierung aufgeführt:
Da die Codierung durchgeführt wird, um mehr Bits auf einem einzelnen Signal übertragen zu lassen, wird die verwendete Bandbreite stark reduziert.
Für eine gegebene Bandbreite wird die Leistung effizient genutzt.
Die Fehlerwahrscheinlichkeit ist stark reduziert.
Die Fehlererkennung erfolgt und auch der Bipolar verfügt über eine Korrekturfunktion.
Die Leistungsdichte ist sehr günstig.
Der Timing-Inhalt ist ausreichend.
Lange Saiten von 1s und 0s wird vermieden, um die Transparenz aufrechtzuerhalten.
Arten der Leitungscodierung
Es gibt 3 Arten der Leitungscodierung
- Unipolar
- Polar
- Bi-polar
Unipolare Signalisierung
Unipolare Signalisierung wird auch als bezeichnet On-Off Keying oder einfach OOK.
Das Vorhandensein eines Impulses repräsentiert a 1 und das Fehlen eines Impulses repräsentiert a 0.
Es gibt zwei Varianten der unipolaren Signalübertragung:
- Non Return to Zero (NRZ)
- Kehre zu Null zurück (RZ)
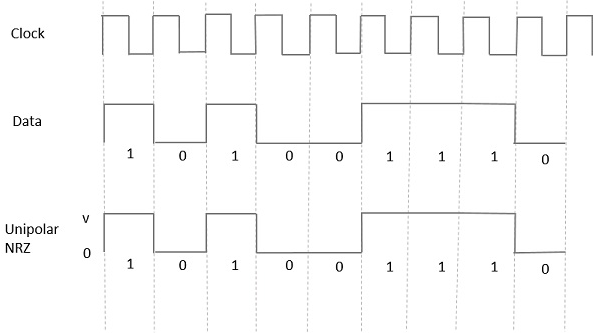
Unipolare Nicht-Rückkehr zu Null (NRZ)
Bei dieser Art der unipolaren Signalisierung wird ein Datenhoch durch einen positiven Impuls dargestellt, der als bezeichnet wird Mark, die eine Dauer hat T0gleich der Symbolbitdauer. Ein Low-in-Dateneingang hat keinen Impuls.
Die folgende Abbildung zeigt dies deutlich.
Advantages
Die Vorteile von Unipolar NRZ sind -
- Es ist einfach.
- Eine geringere Bandbreite ist erforderlich.
Disadvantages
Die Nachteile von Unipolar NRZ sind -
Keine Fehlerkorrektur durchgeführt.
Das Vorhandensein von Niederfrequenzkomponenten kann zu einem Signalabfall führen.
Es ist keine Uhr vorhanden.
Es ist wahrscheinlich, dass ein Synchronisationsverlust auftritt (insbesondere bei langen Zeichenfolgen von 1s und 0s).
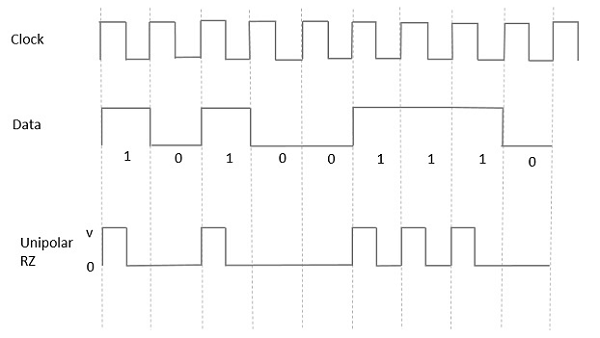
Unipolare Rückkehr zu Null (RZ)
Bei dieser Art der unipolaren Signalisierung ist ein Datenhoch, obwohl durch a dargestellt Mark pulse, seine Dauer T0ist kleiner als die Symbolbitdauer. Die Hälfte der Bitdauer bleibt hoch, kehrt jedoch sofort auf Null zurück und zeigt das Fehlen eines Impulses während der verbleibenden Hälfte der Bitdauer an.
Es wird anhand der folgenden Abbildung klar verstanden.
Advantages
Die Vorteile von Unipolar RZ sind -
- Es ist einfach.
- Die mit der Symbolrate vorhandene Spektrallinie kann als Uhr verwendet werden.
Disadvantages
Die Nachteile von Unipolar RZ sind -
- Keine Fehlerkorrektur.
- Besetzt die doppelte Bandbreite als unipolares NRZ.
- Der Signalabfall wird an den Stellen verursacht, an denen das Signal bei 0 Hz ungleich Null ist.
Polare Signalisierung
Es gibt zwei Methoden der Polarsignalisierung. Sie sind -
- Polar NRZ
- Polar RZ
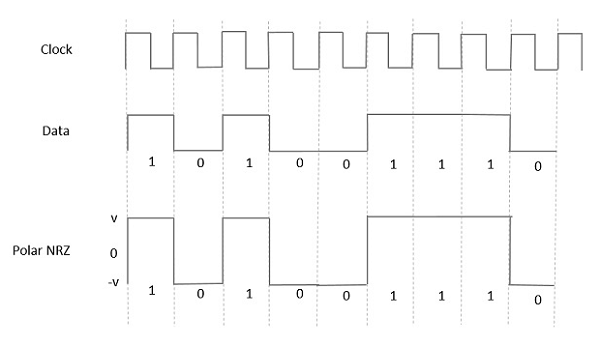
Polar NRZ
Bei dieser Art der polaren Signalisierung werden Daten mit hohem Datenwert durch einen positiven Impuls dargestellt, während Daten mit niedrigem Datenwert durch einen negativen Impuls dargestellt werden. Die folgende Abbildung zeigt dies gut.
Advantages
Die Vorteile von Polar NRZ sind -
- Es ist einfach.
- Es sind keine Niederfrequenzkomponenten vorhanden.
Disadvantages
Die Nachteile von Polar NRZ sind -
Keine Fehlerkorrektur.
Es ist keine Uhr vorhanden.
Der Signalabfall wird an den Stellen verursacht, an denen das Signal ungleich Null ist 0 Hz.
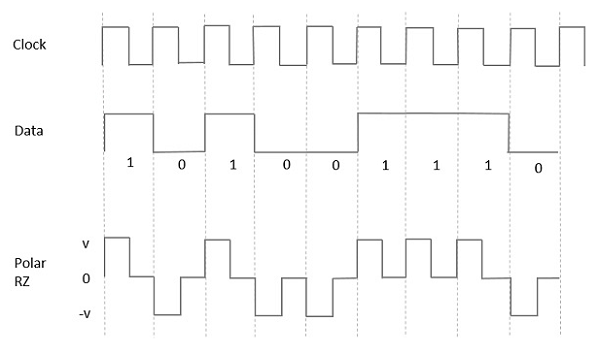
Polar RZ
Bei dieser Art der polaren Signalisierung ist ein Datenhoch, obwohl durch a dargestellt Mark pulse, seine Dauer T0ist kleiner als die Symbolbitdauer. Die Hälfte der Bitdauer bleibt hoch, kehrt jedoch sofort auf Null zurück und zeigt das Fehlen eines Impulses während der verbleibenden Hälfte der Bitdauer an.
Bei einem niedrigen Eingang repräsentiert jedoch ein negativer Impuls die Daten, und der Nullpegel bleibt für die andere Hälfte der Bitdauer gleich. Die folgende Abbildung zeigt dies deutlich.
Advantages
Die Vorteile von Polar RZ sind -
- Es ist einfach.
- Es sind keine Niederfrequenzkomponenten vorhanden.
Disadvantages
Die Nachteile von Polar RZ sind -
Keine Fehlerkorrektur.
Es ist keine Uhr vorhanden.
Besetzt die doppelte Bandbreite von Polar NRZ.
Der Signalabfall wird an Stellen verursacht, an denen das Signal ungleich Null ist 0 Hz.
Bipolare Signalisierung
Dies ist eine Codierungstechnik, die nämlich drei Spannungspegel aufweist +, - und 0. Ein solches Signal heißtduo-binary signal.
Ein Beispiel für diesen Typ ist Alternate Mark Inversion (AMI). Für ein1erhält der Spannungspegel einen Übergang von + nach - oder von - nach +, abwechselnd 1svon gleicher Polarität sein. EIN0 wird einen Spannungspegel von Null haben.
Auch bei dieser Methode gibt es zwei Arten.
- Bipolare NRZ
- Bipolar RZ
Aus den bisher diskutierten Modellen haben wir den Unterschied zwischen NRZ und RZ gelernt. Das geht auch hier genauso. Die folgende Abbildung zeigt dies deutlich.
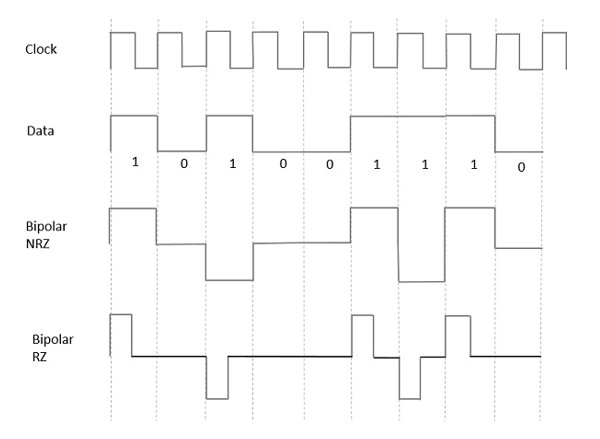
Die obige Abbildung zeigt sowohl die bipolaren NRZ- als auch die RZ-Wellenformen. Die Impulsdauer und die Symbolbitdauer sind beim NRZ-Typ gleich, während die Impulsdauer die Hälfte der Symbolbitdauer beim RZ-Typ beträgt.
Vorteile
Im Folgenden sind die Vorteile aufgeführt:
Es ist einfach.
Es sind keine Niederfrequenzkomponenten vorhanden.
Besetzt eine geringe Bandbreite als unipolare und polare NRZ-Schemata.
Diese Technik eignet sich für die Übertragung über AC-gekoppelte Leitungen, da hier kein Signalabfall auftritt.
Hierbei ist eine einzelne Fehlererkennungsfunktion vorhanden.
Nachteile
Es folgen die Nachteile -
- Es ist keine Uhr vorhanden.
- Lange Datenfolgen führen zum Verlust der Synchronisation.
Spektrale Leistungsdichte
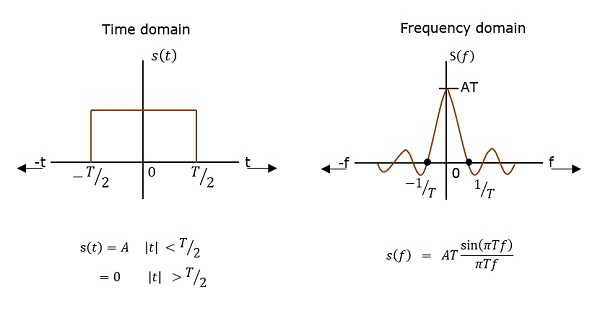
Die Funktion, die beschreibt, wie die Leistung eines Signals bei verschiedenen Frequenzen im Frequenzbereich verteilt wurde, wird als bezeichnet Power Spectral Density (PSD).
PSD ist die Fourier-Transformation der Autokorrelation (Ähnlichkeit zwischen Beobachtungen). Es hat die Form eines Rechteckimpulses.
PSD-Ableitung
Wenn nach dem Einstein-Wiener-Khintchine-Theorem die Autokorrelationsfunktion oder die spektrale Leistungsdichte eines zufälligen Prozesses bekannt ist, kann die andere genau gefunden werden.
Um die Leistungsspektraldichte abzuleiten, verwenden wir daher die Zeitautokorrelation $ (R_x (\ tau)) $ eines Leistungssignals $ x (t) $, wie unten gezeigt.
$ R_x (\ tau) = \ lim_ {T_p \ rightarrow \ infty} \ frac {1} {T_p} \ int _ {\ frac {{- T_p}} {2}} ^ {\ frac {T_p} {2}} x (t) x (t + \ tau) dt $
Da $ x (t) $ aus Impulsen besteht, kann $ R_x (\ tau) $ als geschrieben werden
$ R_x (\ tau) = \ frac {1} {T} \ displaystyle \ sum \ limit_ {n = - \ infty} ^ \ infty R_n \ delta (\ tau - nT) $
Wobei $ R_n = \ lim_ {N \ rightarrow \ infty} \ frac {1} {N} \ sum_ka_ka_ {k + n} $
Wenn wir wissen, dass $ R_n = R _ {- n} $ für reale Signale ist, haben wir
$ S_x (w) = \ frac {1} {T} (R_0 + 2 \ Anzeigestil \ Summe \ Grenzen_ {n = 1} ^ \ Infty R_n \ cos nwT) $
Da das Pulsfilter das Spektrum von $ (w) \ leftrightarrow f (t) $ hat, haben wir
$ s_y (w) = \ mid F (w) \ mid ^ 2S_x (w) $
$ = \ frac {\ mid F (w) \ mid ^ 2} {T} (\ displaystyle \ sum \ limit_ {n = - \ infty} ^ \ infty R_ne ^ {- jnwT_ {b}}) $
$ = \ frac {\ mid F (w) \ mid ^ 2} {T} (R_0 + 2 \ displaystyle \ sum \ limit_ {n = 1} ^ \ infty R_n \ cos nwT) $
Daher erhalten wir die Gleichung für die spektrale Leistungsdichte. Auf diese Weise können wir die PSD verschiedener Zeilencodes ermitteln.
Encoding ist der Prozess des Konvertierens der Daten oder einer bestimmten Folge von Zeichen, Symbolen, Alphabeten usw. in ein bestimmtes Format für die sichere Übertragung von Daten. Decoding ist der umgekehrte Prozess der Codierung, bei dem die Informationen aus dem konvertierten Format extrahiert werden.
Datencodierung
Beim Codieren werden verschiedene Muster von Spannungs- oder Strompegeln zur Darstellung verwendet 1s und 0s der digitalen Signale auf der Übertragungsstrecke.
Die gängigen Arten der Leitungscodierung sind Unipolar, Polar, Bipolar und Manchester.
Codierungstechniken
Die Datencodierungstechnik wird abhängig von der Art der Datenkonvertierung in die folgenden Typen unterteilt.
Analog data to Analog signals - Die Modulationstechniken wie Amplitudenmodulation, Frequenzmodulation und Phasenmodulation von analogen Signalen fallen unter diese Kategorie.
Analog data to Digital signals- Dieser Vorgang kann als Digitalisierung bezeichnet werden, die durch Pulse Code Modulation (PCM) erfolgt. Daher ist es nichts als digitale Modulation. Wie bereits erwähnt, sind Stichproben und Quantisierung die wichtigsten Faktoren. Delta Modulation liefert eine bessere Ausgabe als PCM.
Digital data to Analog signals- Die Modulationstechniken wie Amplitude Shift Keying (ASK), Frequency Shift Keying (FSK), Phase Shift Keying (PSK) usw. fallen unter diese Kategorie. Diese werden in den folgenden Kapiteln erläutert.
Digital data to Digital signals- Diese befinden sich in diesem Abschnitt. Es gibt verschiedene Möglichkeiten, digitale Daten digitalen Signalen zuzuordnen. Einige von ihnen sind -
Non Return to Zero (NRZ)
NRZ Codes hat 1 für Hochspannungspegel und 0für Niederspannungspegel. Das Hauptverhalten von NRZ-Codes besteht darin, dass der Spannungspegel während des Bitintervalls konstant bleibt. Das Ende oder der Anfang eines Bits wird nicht angezeigt und es behält den gleichen Spannungszustand bei, wenn der Wert des vorherigen Bits und der Wert des aktuellen Bits gleich sind.
Die folgende Abbildung erläutert das Konzept der NRZ-Codierung.
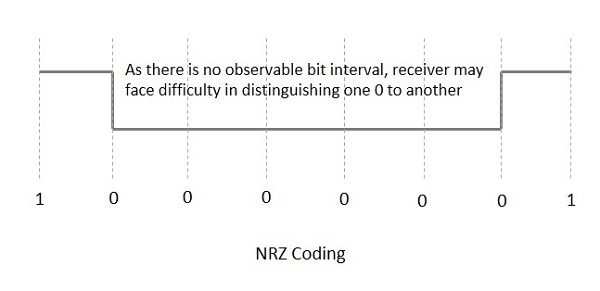
Wenn das obige Beispiel betrachtet wird, wird es für den Empfänger schwierig, zwischen 0 und 1 zu unterscheiden, da es eine lange Folge von konstantem Spannungspegel gibt und die Taktsynchronisation aufgrund des Fehlens eines Bitintervalls verloren gehen kann.
Es gibt zwei Variationen in NRZ, nämlich -
NRZ - L (NRZ - LEVEL)
Die Polarität des Signals ändert sich nur, wenn sich das eingehende Signal von 1 auf 0 oder von 0 auf 1 ändert. Es ist dasselbe wie NRZ, jedoch sollte das erste Bit des Eingangssignals eine Polaritätsänderung aufweisen.
NRZ - I (NRZ - INVERTIERT)
Wenn ein 1tritt beim eingehenden Signal auf, dann tritt zu Beginn des Bitintervalls ein Übergang auf. Für ein0 Beim eingehenden Signal gibt es zu Beginn des Bitintervalls keinen Übergang.
NRZ-Codes hat eine disadvantage dass die Synchronisation der Senderuhr mit der Empfängeruhr bei einer Folge von vollständig gestört wird 1s und 0s. Daher muss eine separate Taktleitung bereitgestellt werden.
Zweiphasencodierung
Der Signalpegel wird für jede Bitzeit sowohl anfangs als auch in der Mitte zweimal überprüft. Daher ist die Taktrate doppelt so hoch wie die Datenübertragungsrate und somit auch die Modulationsrate. Die Uhr wird aus dem Signal selbst entnommen. Die für diese Codierung erforderliche Bandbreite ist größer.
Es gibt zwei Arten der Zweiphasencodierung.
- Zweiphasiges Manchester
- Differential Manchester
Zweiphasiges Manchester
Bei dieser Art der Codierung erfolgt der Übergang in der Mitte des Bitintervalls. Der Übergang für den resultierenden Impuls erfolgt in der Mitte des Intervalls für das Eingangsbit 1 von hoch nach niedrig, während der Übergang für das Eingangsbit von niedrig nach hoch erfolgt0.
Differential Manchester
Bei dieser Art der Codierung tritt immer ein Übergang in der Mitte des Bitintervalls auf. Wenn zu Beginn des Bitintervalls ein Übergang auftritt, ist das Eingangsbit0. Wenn zu Beginn des Bitintervalls kein Übergang auftritt, ist das Eingangsbit1.
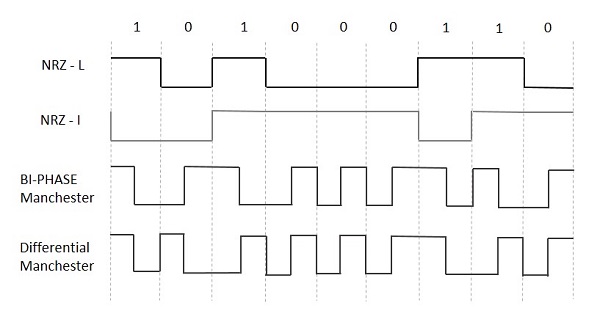
Die folgende Abbildung zeigt die Wellenformen der NRZ-L-, NRZ-I-, Bi-Phase-Manchester- und Differential-Manchester-Codierung für verschiedene digitale Eingänge.
Blockcodierung
Unter den Arten der Blockcodierung sind die berühmten 4B / 5B-Codierung und 8B / 6T-Codierung. Die Anzahl der Bits wird in beiden Prozessen auf unterschiedliche Weise verarbeitet.
4B / 5B-Codierung
Bei der Manchester-Codierung sind zum Senden der Daten die Uhren mit doppelter Geschwindigkeit anstelle der NRZ-Codierung erforderlich. Wie der Name schon sagt, werden hier 4 Codebits mit 5 Bit und einer Mindestanzahl von abgebildet1 Bits in der Gruppe.
Das Taktsynchronisationsproblem bei der NRZ-I-Codierung wird vermieden, indem anstelle jedes Blocks von 4 aufeinanderfolgenden Bits ein äquivalentes Wort von 5 Bits zugewiesen wird. Diese 5-Bit-Wörter sind in einem Wörterbuch vorbestimmt.
Die Grundidee bei der Auswahl eines 5-Bit-Codes ist, dass er haben sollte one leading 0 und es sollte haben no more than two trailing 0s. Daher werden diese Wörter so gewählt, dass zwei Transaktionen pro Bitblock stattfinden.
8B / 6T-Codierung
Wir haben zwei Spannungspegel verwendet, um ein einzelnes Bit über ein einzelnes Signal zu senden. Wenn wir jedoch mehr als 3 Spannungspegel verwenden, können wir mehr Bits pro Signal senden.
Wenn beispielsweise 6 Spannungspegel verwendet werden, um 8 Bits in einem einzelnen Signal darzustellen, wird eine solche Codierung als 8B / 6T-Codierung bezeichnet. Daher haben wir bei dieser Methode bis zu 729 (3 ^ 6) Kombinationen für Signal und 256 (2 ^ 8) Kombinationen für Bits.
Dies sind die Techniken, die hauptsächlich verwendet werden, um digitale Daten in digitale Signale umzuwandeln, indem sie für eine zuverlässige Datenübertragung komprimiert oder codiert werden.
Nachdem wir verschiedene Arten von Codierungstechniken durchlaufen haben, haben wir eine Vorstellung davon, wie die Daten zu Verzerrungen neigen und wie Maßnahmen ergriffen werden, um zu verhindern, dass sie beeinträchtigt werden, um eine zuverlässige Kommunikation herzustellen.
Es gibt eine weitere wichtige Verzerrung, die am wahrscheinlichsten auftritt, die als Inter-Symbol Interference (ISI).
Inter Symbol Interferenz
Dies ist eine Form der Verzerrung eines Signals, bei der ein oder mehrere Symbole nachfolgende Signale stören, Rauschen verursachen oder eine schlechte Ausgabe liefern.
Ursachen von ISI
Die Hauptursachen für ISI sind -
- Mehrwegeausbreitung
- Nichtlineare Frequenz in Kanälen
Der ISI ist unerwünscht und sollte vollständig entfernt werden, um eine saubere Ausgabe zu erhalten. Die Ursachen von ISI sollten ebenfalls gelöst werden, um seine Wirkung zu verringern.
Um ISI in einer mathematischen Form anzuzeigen, die in der Empfängerausgabe vorhanden ist, können wir die Empfängerausgabe betrachten.
Die empfangende Filterausgabe $ y (t) $ wird zum Zeitpunkt $ t_i = iT_b $ (mit) abgetastet i ganzzahlige Werte annehmen), ergibt -
$ y (t_i) = \ mu \ displaystyle \ sum \ limit_ {k = - \ infty} ^ {\ infty} a_kp (iT_b - kT_b) $
$ = \ mu a_i + \ mu \ displaystyle \ sum \ limit_ {k = - \ infty \\ k \ neq? i} ^ {\ infty} a_kp (iT_b - kT_b) $
In der obigen Gleichung wird der erste Term $ \ mu a_i $ durch die erzeugt ith übertragenes Bit.
Der zweite Term repräsentiert den Resteffekt aller anderen übertragenen Bits auf die Decodierung des ithbisschen. Dieser Resteffekt wird als bezeichnetInter Symbol Interference.
In Abwesenheit von ISI wird die Ausgabe -
$$ y (t_i) = \ mu a_i $$
Diese Gleichung zeigt, dass die ithDas übertragene Bit wird korrekt wiedergegeben. Das Vorhandensein von ISI führt jedoch zu Bitfehlern und Verzerrungen in der Ausgabe.
Beim Entwerfen des Senders oder Empfängers ist es wichtig, dass Sie die Auswirkungen von ISI minimieren, um die Ausgabe mit der geringstmöglichen Fehlerrate zu empfangen.
Korrelative Codierung
Bisher haben wir diskutiert, dass ISI ein unerwünschtes Phänomen ist und das Signal verschlechtert. Mit demselben ISI kann jedoch bei kontrollierter Verwendung eine Bitrate von erreicht werden2W Bits pro Sekunde in einem Bandbreitenkanal WHertz. Ein solches Schema heißtCorrelative Coding oder Partial response signaling schemes.
Da die Menge an ISI bekannt ist, ist es einfach, den Empfänger gemäß den Anforderungen zu entwerfen, um die Auswirkung von ISI auf das Signal zu vermeiden. Die Grundidee der korrelativen Codierung wird anhand eines Beispiels von erreichtDuo-binary Signaling.
Duo-binäre Signalisierung
Der Name Duo-Binary bedeutet die Verdoppelung der Übertragungsfähigkeit des Binärsystems. Um dies zu verstehen, betrachten wir eine binäre Eingabesequenz{ak} bestehend aus unkorrelierten Binärziffern mit jeweils einer Dauer TaSekunden. In diesem das Signal1 wird vertreten durch a +1 Volt und das Symbol 0 durch eine -1 Volt.
Daher wird der Duo-Binär-Codierer ausgegeben ck wird als Summe der gegenwärtigen Binärziffer angegeben ak und der vorherige Wert ak-1 wie in der folgenden Gleichung gezeigt.
$$ c_k = a_k + a_ {k-1} $$
Die obige Gleichung besagt, dass die Eingabesequenz der unkorrelierten Binärsequenz {ak} wird in eine Folge von korrelierten dreistufigen Impulsen geändert {ck}. Diese Korrelation zwischen den Impulsen kann so verstanden werden, dass ISI auf künstliche Weise in das übertragene Signal eingeführt wird.
Augenmuster
Ein effektiver Weg, um die Auswirkungen von ISI zu untersuchen, ist die Eye Pattern. Der Name Eye Pattern wurde aufgrund seiner Ähnlichkeit mit dem menschlichen Auge für binäre Wellen vergeben. Der innere Bereich des Augenmusters wird als bezeichneteye opening. Die folgende Abbildung zeigt das Bild eines Augenmusters.
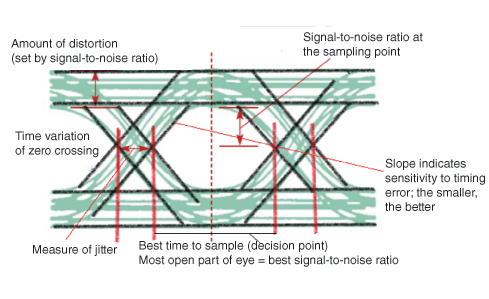
Jitter ist die kurzfristige Änderung des Zeitpunkts des digitalen Signals von seiner idealen Position, die zu Datenfehlern führen kann.
Wenn die Wirkung von ISI zunimmt, nehmen die Spuren vom oberen Teil zum unteren Teil der Augenöffnung zu und das Auge wird vollständig geschlossen, wenn der ISI sehr hoch ist.
Ein Augenmuster enthält die folgenden Informationen zu einem bestimmten System.
Tatsächliche Augenmuster werden verwendet, um die Bitfehlerrate und das Signal-Rausch-Verhältnis abzuschätzen.
Die Breite der Augenöffnung definiert das Zeitintervall, über das die empfangene Welle ohne Fehler von ISI abgetastet werden kann.
Der Zeitpunkt, zu dem die Augenöffnung weit ist, ist der bevorzugte Zeitpunkt für die Probenahme.
Die Geschwindigkeit des Schließens des Auges bestimmt entsprechend der Abtastzeit, wie empfindlich das System auf den Zeitsteuerungsfehler reagiert.
Die Höhe der Augenöffnung zu einem bestimmten Abtastzeitpunkt definiert den Spielraum über dem Rauschen.
Daher ist die Interpretation des Augenmusters ein wichtiger Gesichtspunkt.
Ausgleich
Damit eine zuverlässige Kommunikation hergestellt werden kann, benötigen wir eine qualitativ hochwertige Ausgabe. Die Übertragungsverluste des Kanals und andere Faktoren, die die Qualität des Signals beeinflussen, müssen behandelt werden. Der am häufigsten auftretende Verlust ist, wie wir bereits besprochen haben, der ISI.
Um das Signal frei von ISI zu machen und ein maximales Signal-Rausch-Verhältnis sicherzustellen, müssen wir eine Methode namens aufrufen Equalization. Die folgende Abbildung zeigt einen Equalizer im Empfängerbereich des Kommunikationssystems.
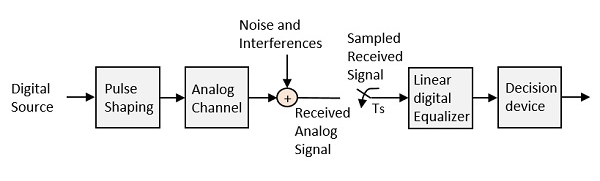
Das Rauschen und die Interferenzen, die in der Figur angegeben sind, treten wahrscheinlich während der Übertragung auf. Der regenerative Repeater verfügt über eine Entzerrerschaltung, die die Übertragungsverluste durch Formung der Schaltung kompensiert. Der Equalizer kann implementiert werden.
Fehlerwahrscheinlichkeit und Gütezahl
Die Rate, mit der Daten übertragen werden können, wird als bezeichnet data rate. Die Rate, mit der Fehler in den Bits auftreten, während Daten übertragen werden, wird als bezeichnetBit Error Rate (BER).
Die Wahrscheinlichkeit des Auftretens von BER ist die Error Probability. Die Erhöhung des Signal-Rausch-Verhältnisses (SNR) verringert die BER, daher wird auch die Fehlerwahrscheinlichkeit verringert.
In einem analogen Empfänger ist die figure of meritbeim Erfassungsprozess kann als das Verhältnis des Ausgangs-SNR zum Eingangs-SNR bezeichnet werden. Ein höherer Wert der Gütezahl ist von Vorteil.
Digital-Analog-Signale sind die nächste Umwandlung, die wir in diesem Kapitel behandeln werden. Diese Techniken werden auch als bezeichnetDigital Modulation techniques.
Digital ModulationBietet mehr Informationskapazität, hohe Datensicherheit, schnellere Systemverfügbarkeit bei qualitativ hochwertiger Kommunikation. Daher haben digitale Modulationstechniken eine größere Nachfrage nach ihrer Fähigkeit, größere Datenmengen zu übertragen als analoge Modulationstechniken.
Es gibt viele Arten von digitalen Modulationstechniken und auch deren Kombinationen, je nach Bedarf. Von allen werden wir die prominenten diskutieren.
ASK - Amplitude Shift Keying
Die Amplitude des resultierenden Ausgangs hängt von den Eingangsdaten ab, ob es sich um einen Nullpegel oder eine Variation von positiv und negativ handeln soll, abhängig von der Trägerfrequenz.
FSK - Frequenzumtastung
Die Frequenz des Ausgangssignals ist abhängig von den angewendeten Eingangsdaten entweder hoch oder niedrig.
PSK - Phasenumtastung
Die Phase des Ausgangssignals wird je nach Eingang verschoben. Es gibt hauptsächlich zwei Arten, nämlich die binäre Phasenumtastung (BPSK) und die Quadratur-Phasenumtastung (QPSK), je nach Anzahl der Phasenverschiebungen. Das andere ist das Differential Phase Shift Keying (DPSK), das die Phase gemäß dem vorherigen Wert ändert.
M-ary-Codierung
M-ary-Codierungstechniken sind die Verfahren, bei denen mehr als zwei Bits gleichzeitig auf einem einzelnen Signal übertragen werden. Dies hilft bei der Reduzierung der Bandbreite.
Die Arten von M-ary-Techniken sind -
- M-ary ASK
- M-ary FSK
- M-ary PSK
All dies wird in den folgenden Kapiteln erläutert.
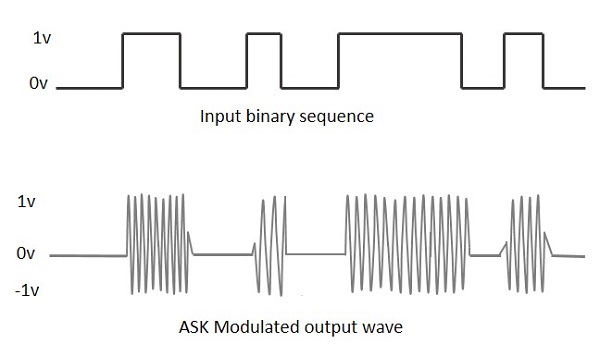
Amplitude Shift Keying (ASK) ist eine Art der Amplitudenmodulation, die die Binärdaten in Form von Variationen in der Amplitude eines Signals darstellt.
Jedes modulierte Signal hat einen Hochfrequenzträger. Das Binärsignal ergibt bei ASK-Modulation azero Wert für Low Eingabe, während es die gibt carrier output zum High Eingang.
Die folgende Abbildung zeigt die ASK-modulierte Wellenform zusammen mit ihrem Eingang.
Um den Prozess zum Erhalten dieser ASK-modulierten Welle zu finden, lernen wir die Funktionsweise des ASK-Modulators kennen.
ASK Modulator
Das ASK-Modulator-Blockdiagramm umfasst den Trägersignalgenerator, die Binärsequenz aus dem Nachrichtensignal und das bandbegrenzte Filter. Es folgt das Blockschaltbild des ASK-Modulators.
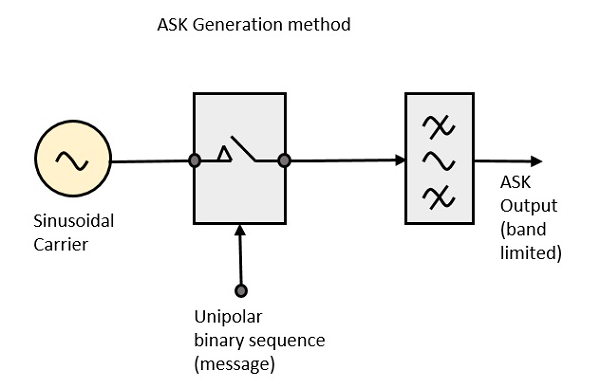
Der Trägergenerator sendet einen kontinuierlichen Hochfrequenzträger. Die Binärsequenz aus dem Nachrichtensignal bewirkt, dass der unipolare Eingang entweder hoch oder niedrig ist. Das hohe Signal schließt den Schalter und ermöglicht eine Trägerwelle. Daher ist der Ausgang das Trägersignal bei hohem Eingang. Bei niedrigem Eingang öffnet sich der Schalter und es tritt keine Spannung auf. Daher ist die Ausgabe niedrig.
Das Bandbegrenzungsfilter formt den Impuls in Abhängigkeit von den Amplituden- und Phaseneigenschaften des Bandbegrenzungsfilters oder des Impulsformungsfilters.
ASK Demodulator
Es gibt zwei Arten von ASK-Demodulationstechniken. Sie sind -
- Asynchrone ASK-Demodulation / Erkennung
- Synchrone ASK-Demodulation / Erkennung
Die Taktfrequenz am Sender, wenn sie mit der Taktfrequenz am Empfänger übereinstimmt, wird als a bezeichnet Synchronous method, wenn die Frequenz synchronisiert wird. Ansonsten ist es bekannt alsAsynchronous.
Asynchroner ASK-Demodulator
Der asynchrone ASK-Detektor besteht aus einem Halbwellengleichrichter, einem Tiefpassfilter und einem Komparator. Es folgt das Blockdiagramm für dasselbe.
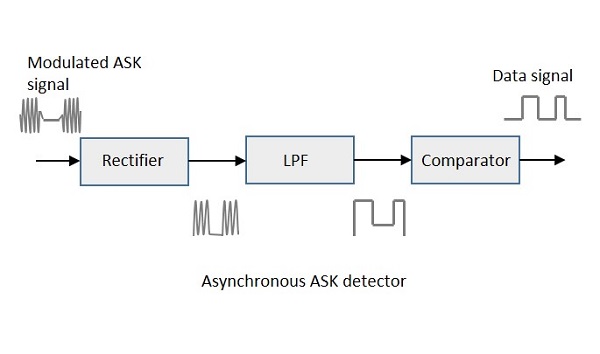
Das modulierte ASK-Signal wird an den Halbwellengleichrichter abgegeben, der eine positive Halbleistung liefert. Das Tiefpassfilter unterdrückt die höheren Frequenzen und liefert eine Hüllkurvenerkennung, von der der Komparator eine digitale Ausgabe liefert.
Synchroner ASK-Demodulator
Der synchrone ASK-Detektor besteht aus einem Detektor nach dem Quadratgesetz, einem Tiefpassfilter, einem Komparator und einem Spannungsbegrenzer. Es folgt das Blockdiagramm für dasselbe.
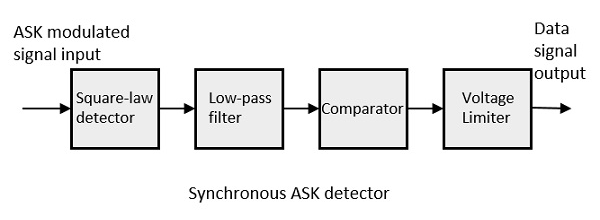
Das ASK-modulierte Eingangssignal wird an den Quadratgesetzdetektor übergeben. Ein Quadratgesetzdetektor ist einer, dessen Ausgangsspannung proportional zum Quadrat der amplitudenmodulierten Eingangsspannung ist. Das Tiefpassfilter minimiert die höheren Frequenzen. Der Komparator und der Spannungsbegrenzer sorgen für einen sauberen digitalen Ausgang.
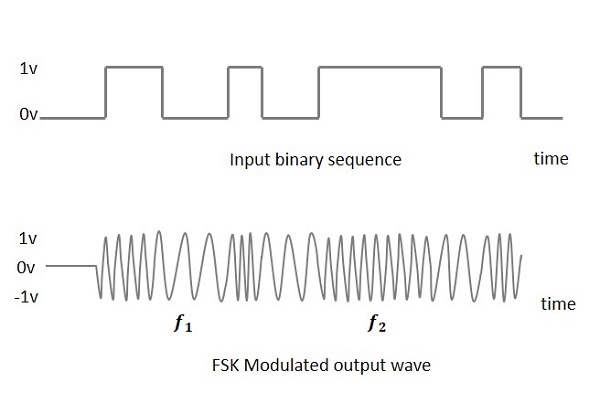
Frequency Shift Keying (FSK)ist die digitale Modulationstechnik, bei der die Frequenz des Trägersignals entsprechend den Änderungen des digitalen Signals variiert. FSK ist ein Schema der Frequenzmodulation.
Der Ausgang einer FSK-modulierten Welle hat eine hohe Frequenz für einen binären High-Eingang und eine niedrige Frequenz für einen binären Low-Eingang. Die Binärdatei1s und 0s werden Markierungs- und Raumfrequenzen genannt.
Das folgende Bild ist die schematische Darstellung der FSK-modulierten Wellenform zusammen mit ihrer Eingabe.
Um den Prozess zum Erhalten dieser FSK-modulierten Welle zu finden, informieren Sie uns über die Funktionsweise eines FSK-Modulators.
FSK Modulator
Das FSK-Modulator-Blockdiagramm besteht aus zwei Oszillatoren mit einem Takt und der binären Eingangssequenz. Es folgt das Blockdiagramm.
Die beiden Oszillatoren, die Signale mit höherer und niedrigerer Frequenz erzeugen, sind zusammen mit einer internen Uhr mit einem Schalter verbunden. Um die abrupten Phasendiskontinuitäten der Ausgangswellenform während der Übertragung der Nachricht zu vermeiden, wird intern ein Takt an beide Oszillatoren angelegt. Die Binäreingangssequenz wird an den Sender angelegt, um die Frequenzen entsprechend dem Binäreingang auszuwählen.
FSK Demodulator
Es gibt verschiedene Methoden zum Demodulieren einer FSK-Welle. Die Hauptmethoden der FSK-Erkennung sindasynchronous detector und synchronous detector. Der synchrone Detektor ist kohärent, während der asynchrone Detektor nicht kohärent ist.
Asynchroner FSK-Detektor
Das Blockdiagramm des asynchronen FSK-Detektors besteht aus zwei Bandpassfiltern, zwei Hüllkurvendetektoren und einer Entscheidungsschaltung. Es folgt die schematische Darstellung.
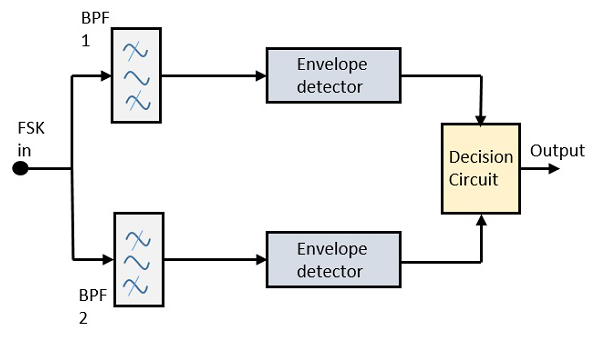
Das FSK-Signal wird durch die beiden abgestimmten Bandpassfilter (BPFs) geleitet Space und MarkFrequenzen. Die Ausgabe dieser beiden BPFs sieht aus wie ein ASK-Signal, das an den Hüllkurvendetektor gesendet wird. Das Signal in jedem Hüllkurvendetektor wird asynchron moduliert.
Die Entscheidungsschaltung wählt aus, welcher Ausgang wahrscheinlicher ist, und wählt ihn aus einem der Hüllkurvendetektoren aus. Außerdem wird die Wellenform in eine rechteckige Form umgewandelt.
Synchroner FSK-Detektor
Das Blockschaltbild des synchronen FSK-Detektors besteht aus zwei Mischern mit lokalen Oszillatorschaltungen, zwei Bandpassfiltern und einer Entscheidungsschaltung. Es folgt die schematische Darstellung.
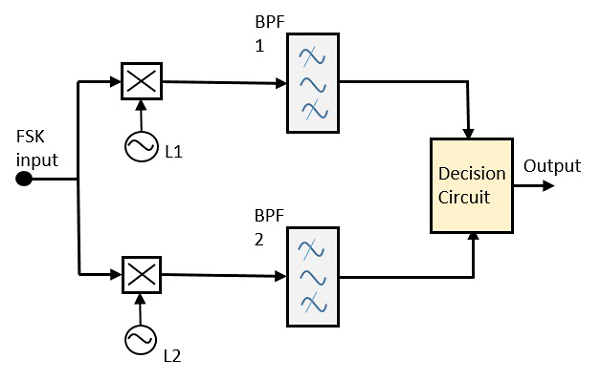
Der FSK-Signaleingang wird an die beiden Mischer mit lokalen Oszillatorschaltungen gegeben. Diese beiden sind mit zwei Bandpassfiltern verbunden. Diese Kombinationen wirken als Demodulatoren und die Entscheidungsschaltung wählt aus, welcher Ausgang wahrscheinlicher ist, und wählt ihn aus einem der Detektoren aus. Die beiden Signale haben einen minimalen Frequenzabstand.
Für beide Demodulatoren hängt die Bandbreite von jedem von ihnen von ihrer Bitrate ab. Dieser synchrone Demodulator ist etwas komplexer als Demodulatoren vom asynchronen Typ.
Phase Shift Keying (PSK)ist die digitale Modulationstechnik, bei der die Phase des Trägersignals durch Variieren der Sinus- und Cosinus-Eingänge zu einem bestimmten Zeitpunkt geändert wird. Die PSK-Technik wird häufig für drahtlose LANs, biometrische, kontaktlose Vorgänge sowie für RFID- und Bluetooth-Kommunikation verwendet.
Es gibt zwei Arten von PSK, abhängig von den Phasen, in denen das Signal verschoben wird. Sie sind -
Binäre Phasenumtastung (BPSK)
Dies wird auch als 2-Phasen-PSK oder Phasenumkehrschlüssel bezeichnet. Bei dieser Technik nimmt der Sinuswellenträger zwei Phasenumkehrungen wie 0 ° und 180 ° vor.
BPSK ist im Grunde ein DSBSC-Modulationsschema (Double Side Band Suppressed Carrier), bei dem die Nachricht die digitale Information ist.
Quadratur-Phasenumtastung (QPSK)
Dies ist die Phasenumtastungstechnik, bei der der Sinuswellenträger vier Phasenumkehrungen wie 0 °, 90 °, 180 ° und 270 ° durchführt.
Wenn diese Art von Techniken weiter ausgebaut wird, kann PSK je nach Anforderung auch um acht oder sechzehn Werte durchgeführt werden.
BPSK-Modulator
Das Blockdiagramm der binären Phasenumtastung besteht aus dem Gleichgewichtsmodulator, der die Trägersinuswelle als einen Eingang und die binäre Sequenz als den anderen Eingang hat. Es folgt die schematische Darstellung.
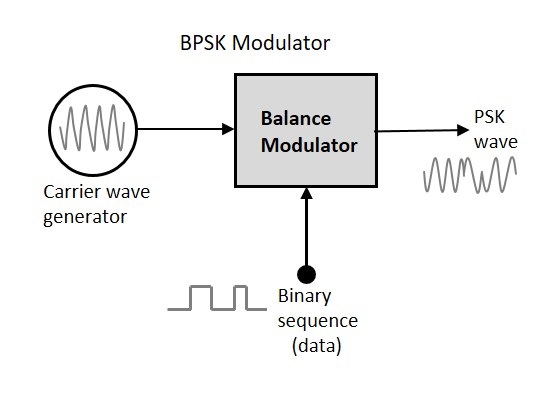
Die Modulation von BPSK erfolgt mit einem Balance-Modulator, der die beiden am Eingang angelegten Signale multipliziert. Bei einem Binäreingang von Null ist die Phase0° und für einen hohen Eingang ist die Phasenumkehrung von 180°.
Es folgt die schematische Darstellung der BPSK-modulierten Ausgangswelle zusammen mit ihrem gegebenen Eingang.
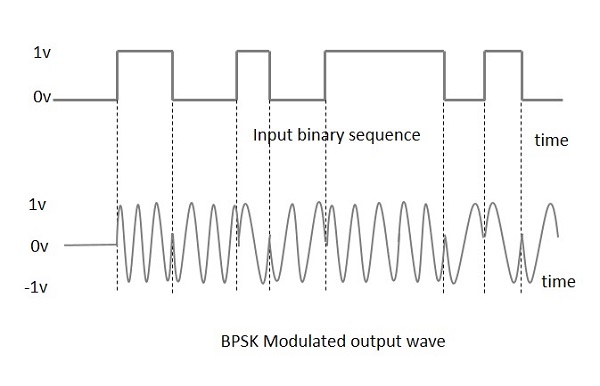
Die Ausgangssinuswelle des Modulators ist der direkte Eingangsträger oder der invertierte (um 180 ° phasenverschobene) Eingangsträger, der eine Funktion des Datensignals ist.
BPSK Demodulator
Das Blockschaltbild des BPSK-Demodulators besteht aus einem Mischer mit lokaler Oszillatorschaltung, einem Bandpassfilter und einer Detektorschaltung mit zwei Eingängen. Das Diagramm ist wie folgt.
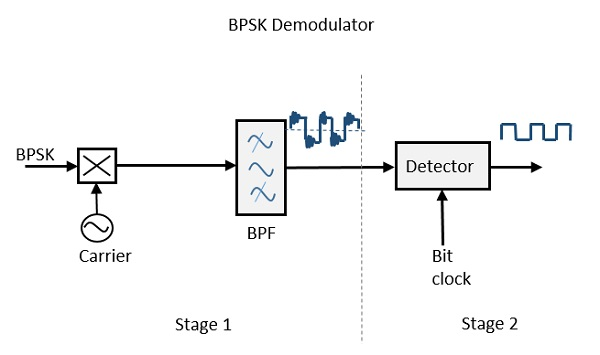
Durch Wiederherstellen des bandbegrenzten Nachrichtensignals mit Hilfe der Mischerschaltung und des Bandpassfilters wird die erste Stufe der Demodulation abgeschlossen. Das bandbegrenzte Basisbandsignal wird erhalten und dieses Signal wird verwendet, um den binären Nachrichtenbitstrom zu regenerieren.
In der nächsten Stufe der Demodulation wird die Bittaktrate an der Detektorschaltung benötigt, um das ursprüngliche binäre Nachrichtensignal zu erzeugen. Wenn die Bitrate ein Sub-Vielfaches der Trägerfrequenz ist, wird die Bittaktregeneration vereinfacht. Um die Schaltung leicht verständlich zu machen, eine Entscheidungsschaltung kann auch an der 2 eingesetzt wird nd Stufe der Detektion.
Das Quadrature Phase Shift Keying (QPSK) ist eine Variation von BPSK und es handelt sich auch um ein DSBSC-Modulationsschema (Double Side Band Suppressed Carrier), das zwei digitale Bits gleichzeitig sendet bigits.
Anstatt digitale Bits in eine Reihe digitaler Ströme umzuwandeln, werden sie in Bitpaare umgewandelt. Dies verringert die Datenbitrate auf die Hälfte, wodurch Platz für die anderen Benutzer bleibt.
QPSK Modulator
Der QPSK-Modulator verwendet einen Bit-Splitter, zwei Multiplikatoren mit lokalem Oszillator, einen 2-Bit-Seriell-Parallel-Wandler und eine Sommerschaltung. Es folgt das Blockdiagramm für dasselbe.

Am Eingang des Modulators, das geradzahligen Bits des Nachrichtensignals (dh 2 nd Bit, 4 th Bit, 6 th Bit, etc.) und ungeraden Bits (dh 1. Bit, 3 rd bit, 5 th Bit, etc.) getrennt sind durch den Bitteiler und werden mit demselben Träger multipliziert, um ungerade BPSK (genannt als) zu erzeugenPSKI) und sogar BPSK (genannt als PSKQ). DasPSKQ Das Signal ist ohnehin um 90 ° phasenverschoben, bevor es moduliert wird.
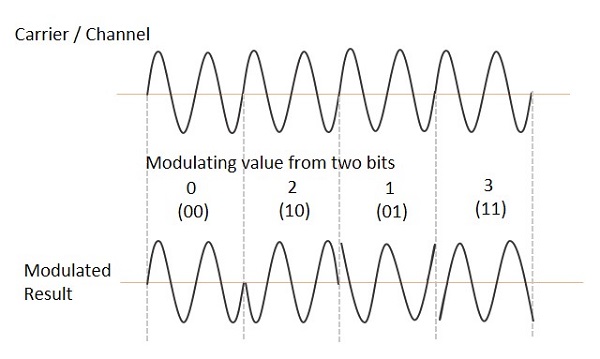
Die QPSK-Wellenform für die Zwei-Bit-Eingabe ist wie folgt, die das modulierte Ergebnis für verschiedene Instanzen von Binäreingängen zeigt.
QPSK Demodulator
Der QPSK-Demodulator verwendet zwei Produktdemodulatorschaltungen mit lokalem Oszillator, zwei Bandpassfilter, zwei Integratorschaltungen und einen 2-Bit-Parallel-Seriell-Wandler. Es folgt das Diagramm für dasselbe.
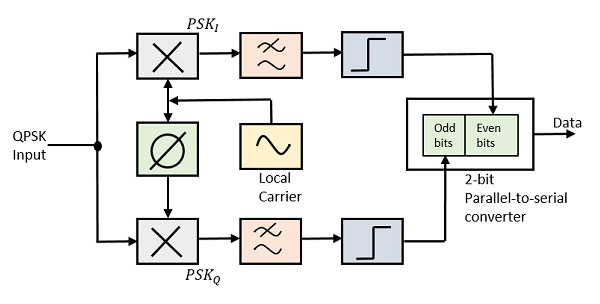
Die beiden Produktdetektoren am Eingang des Demodulators demodulieren gleichzeitig die beiden BPSK-Signale. Das Bitpaar wird hier aus den Originaldaten wiederhergestellt. Diese Signale werden nach der Verarbeitung an den Parallel-Seriell-Wandler weitergeleitet.
Im Differential Phase Shift Keying (DPSK)Die Phase des modulierten Signals ist relativ zum vorherigen Signalelement verschoben. Hier wird kein Referenzsignal berücksichtigt. Die Signalphase folgt dem hohen oder niedrigen Zustand des vorherigen Elements. Diese DPSK-Technik benötigt keinen Referenzoszillator.
Die folgende Abbildung zeigt die Modellwellenform von DPSK.
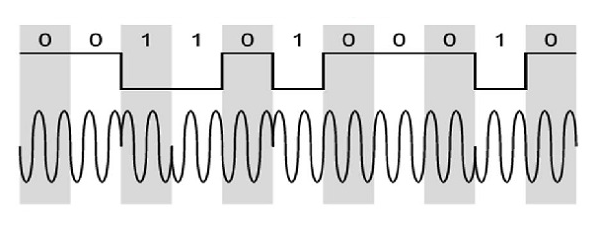
Aus der obigen Figur ist ersichtlich, dass, wenn das Datenbit niedrig ist, dh 0, die Phase des Signals nicht umgekehrt wird, sondern so fortgesetzt wird, wie sie war. Wenn die Daten ein High sind, dh 1, dann wird die Phase des Signals wie bei NRZI umgekehrt und auf 1 invertiert (eine Form der Differentialcodierung).
Wenn wir die obige Wellenform beobachten, können wir sagen, dass der hohe Zustand eine darstellt M im Modulationssignal und im Low-Zustand steht a W im modulierenden Signal.
DPSK-Modulator
DPSK ist eine Technik von BPSK, bei der kein Referenzphasensignal vorhanden ist. Hier kann das übertragene Signal selbst als Referenzsignal verwendet werden. Es folgt das Diagramm des DPSK-Modulators.
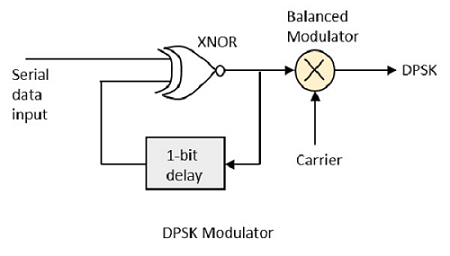
DPSK codiert zwei unterschiedliche Signale, dh den Träger und das Modulationssignal mit jeweils 180 ° Phasenverschiebung. Der serielle Dateneingang wird an das XNOR-Gatter übergeben und der Ausgang wird erneut mit einer 1-Bit-Verzögerung an den anderen Eingang zurückgeführt. Der Ausgang des XNOR-Gatters wird zusammen mit dem Trägersignal an den Ausgleichsmodulator gegeben, um das DPSK-modulierte Signal zu erzeugen.
DPSK Demodulator
Im DPSK-Demodulator wird die Phase des umgekehrten Bits mit der Phase des vorherigen Bits verglichen. Es folgt das Blockdiagramm des DPSK-Demodulators.

Aus der obigen Figur ist ersichtlich, dass der Ausgleichsmodulator das DPSK-Signal zusammen mit einem 1-Bit-Verzögerungseingang erhält. Dieses Signal wird mit Hilfe von LPF auf niedrigere Frequenzen beschränkt. Dann wird es an eine Shaper-Schaltung weitergeleitet, die ein Komparator oder eine Schmitt-Triggerschaltung ist, um die ursprünglichen Binärdaten als Ausgang wiederherzustellen.
Das Wort binär repräsentiert zwei Bits. M stellt eine Ziffer dar, die der Anzahl von Bedingungen, Ebenen oder Kombinationen entspricht, die für eine bestimmte Anzahl von Binärvariablen möglich sind.
Dies ist die Art der digitalen Modulationstechnik, die für die Datenübertragung verwendet wird, bei der anstelle eines Bits zwei oder mehr Bits gleichzeitig übertragen werden. Da ein einzelnes Signal für die Mehrbitübertragung verwendet wird, wird die Kanalbandbreite reduziert.
M-ary-Gleichung
Wenn ein digitales Signal unter vier Bedingungen wie Spannungspegeln, Frequenzen, Phasen und Amplitude ausgegeben wird, dann M = 4.
Die Anzahl der Bits, die zur Erzeugung einer bestimmten Anzahl von Bedingungen erforderlich sind, wird mathematisch ausgedrückt als
$$ N = \ log_ {2} {M} $$
Wo
N ist die Anzahl der erforderlichen Bits
M ist die Anzahl der Bedingungen, Ebenen oder Kombinationen, mit denen möglich ist N Bits.
Die obige Gleichung kann neu angeordnet werden als
$$ 2 ^ N = M $$
Zum Beispiel mit zwei Bits, 22 = 4 Bedingungen sind möglich.
Arten von M-ary-Techniken
Im Allgemeinen werden in der digitalen Kommunikation mehrstufige (M-ary) Modulationstechniken verwendet, da die digitalen Eingänge mit mehr als zwei Modulationspegeln am Eingang des Senders zulässig sind. Daher sind diese Techniken bandbreiteneffizient.
Es gibt viele M-ary-Modulationstechniken. Einige dieser Techniken modulieren einen Parameter des Trägersignals, wie z. B. Amplitude, Phase und Frequenz.
M-ary ASK
Dies wird als M-ary Amplitude Shift Keying (M-ASK) oder M-ary Pulse Amplitude Modulation (PAM) bezeichnet.
Das amplitude des Trägersignals übernimmt M verschiedene Level.
Darstellung von M-ary ASK
$ S_m (t) = A_mcos (2 \ pi f_ct) \ quad A_m \ epsilon {(2m - 1 - M) \ Delta, m = 1,2 ... \: .M} \ quad und \ quad 0 \ leq t \ leq T_s $
Einige herausragende Merkmale von M-ary ASK sind -
- Diese Methode wird auch in PAM verwendet.
- Die Implementierung ist einfach.
- M-ary ASK ist anfällig für Rauschen und Verzerrungen.
M-ary FSK
Dies wird als M-ary-Frequenzumtastung (M-ary FSK) bezeichnet.
Das frequency des Trägersignals übernimmt M verschiedene Level.
Vertretung von M-ary FSK
$ S_i (t) = \ sqrt {\ frac {2E_s} {T_s}} \ cos \ left (\ frac {\ pi} {T_s} \ left (n_c + i \ right) t \ right) $ $ 0 \ leq t \ leq T_s \ quad und \ quad i = 1,2,3 ... \: ..M $
Wobei $ f_c = \ frac {n_c} {2T_s} $ für eine feste ganze Zahl n.
Einige herausragende Merkmale von M-ary FSK sind -
Nicht so geräuschempfindlich wie ASK.
Das übertragene M Anzahl der Signale ist in Energie und Dauer gleich.
Die Signale werden durch $ \ frac {1} {2T_s} $ Hz getrennt, wodurch die Signale orthogonal zueinander sind.
Schon seit M Signale sind orthogonal, es gibt keine Überfüllung im Signalraum.
Die Bandbreiteneffizienz von M-ary FSK nimmt ab und die Energieeffizienz nimmt mit zunehmendem zu M.
M-ary PSK
Dies wird als M-ary Phase Shift Keying (M-ary PSK) bezeichnet.
Das phase des Trägersignals übernimmt M verschiedene Level.
Darstellung von M-ary PSK
$ S_i (t) = \ sqrt {\ frac {2E} {T}} \ cos \ left (w_o t + \ phi _it \ right) $ $ 0 \ leq t \ leq T \ quad und \ quad i = 1,2 ... M $
$$ \ phi _i \ left (t \ right) = \ frac {2 \ pi i} {M} \ quad wobei \ quad i = 1,2,3 ... \: ... M $$
Einige herausragende Merkmale von M-ary PSK sind -
Die Hüllkurve ist konstant mit mehr Phasenmöglichkeiten.
Diese Methode wurde in den frühen Tagen der Weltraumkommunikation angewendet.
Bessere Leistung als ASK und FSK.
Minimaler Phasenschätzfehler am Empfänger.
Die Bandbreiteneffizienz von M-ary PSK nimmt ab und die Energieeffizienz nimmt mit zunehmendem zu M.
Bisher haben wir verschiedene Modulationstechniken diskutiert. Die Ausgabe all dieser Techniken ist eine binäre Sequenz, dargestellt als1s und 0s. Diese binäre oder digitale Information hat viele Arten und Formen, die weiter diskutiert werden.
Informationen sind die Quelle eines Kommunikationssystems, ob analog oder digital. Information theory ist ein mathematischer Ansatz zur Untersuchung der Kodierung von Informationen zusammen mit der Quantifizierung, Speicherung und Kommunikation von Informationen.
Bedingungen für das Eintreten von Ereignissen
Wenn wir ein Ereignis betrachten, gibt es drei Eintrittsbedingungen.
Wenn das Ereignis nicht aufgetreten ist, liegt eine Bedingung von vor uncertainty.
Wenn das Ereignis gerade eingetreten ist, liegt eine Bedingung von vor surprise.
Wenn das Ereignis vor einiger Zeit eingetreten ist, besteht die Bedingung, dass einige vorliegen information.
Diese drei Ereignisse treten zu unterschiedlichen Zeiten auf. Der Unterschied in diesen Bedingungen hilft uns, Kenntnisse über die Wahrscheinlichkeiten des Auftretens von Ereignissen zu erlangen.
Entropie
Wenn wir die Möglichkeiten des Auftretens eines Ereignisses beobachten, wie überraschend oder unsicher es wäre, bedeutet dies, dass wir versuchen, eine Vorstellung vom durchschnittlichen Inhalt der Informationen aus der Quelle des Ereignisses zu bekommen.
Entropy kann als Maß für den durchschnittlichen Informationsgehalt pro Quellensymbol definiert werden. Claude Shannon, der "Vater der Informationstheorie", lieferte eine Formel dafür als -
$$ H = - \ sum_ {i} p_i \ log_ {b} p_i $$
Wo pi ist die Wahrscheinlichkeit des Auftretens einer Zeichennummer i aus einem bestimmten Strom von Zeichen und bist die Basis des verwendeten Algorithmus. Daher wird dies auch als bezeichnetShannon’s Entropy.
Die Unsicherheit, die nach Beobachtung des Kanalausgangs über den Kanaleingang verbleibt, wird als bezeichnet Conditional Entropy. Es wird mit $ H (x \ mid y) $ bezeichnet
Gegenseitige Information
Betrachten wir einen Kanal, dessen Ausgang ist Y und Eingabe ist X
Die Entropie für vorherige Unsicherheit sei X = H(x)
(Dies wird angenommen, bevor die Eingabe angewendet wird.)
Um die Unsicherheit der Ausgabe zu kennen, betrachten wir nach dem Anwenden der Eingabe die bedingte Entropie Y = yk
$$ H \ left (x \ mid y_k \ right) = \ sum_ {j = 0} ^ {j - 1} p \ left (x_j \ mid y_k \ right) \ log_ {2} \ left [\ frac {1 } {p (x_j \ mid y_k)} \ right] $$
Dies ist eine Zufallsvariable für $ H (X \ mid y = y_0) \: ... \: ... \: ... \: ... \: ... \: H (X \ mid y = y_k) $ mit Wahrscheinlichkeiten $ p (y_0) \: ... \: ... \: ... \: ... \: p (y_ {k-1)} $.
Der Mittelwert von $ H (X \ mid y = y_k) $ für das Ausgabealphabet y ist -
$ H \ left (X \ mid Y \ right) = \ displaystyle \ sum \ limit_ {k = 0} ^ {k - 1} H \ left (X \ mid y = y_k \ right) p \ left (y_k \ right) ) $
$ = \ Anzeigestil \ Summe \ Grenzen_ {k = 0} ^ {k - 1} \ Anzeigestil \ Summe \ Grenzen_ {j = 0} ^ {j - 1} p \ links (x_j \ Mitte y_k \ rechts) p \ links (y_k \ right) \ log_ {2} \ left [\ frac {1} {p \ left (x_j \ mid y_k \ right)} \ right] $
$ = \ Anzeigestil \ Summe \ Grenzen_ {k = 0} ^ {k - 1} \ Anzeigestil \ Summe \ Grenzen_ {j = 0} ^ {j - 1} p \ links (x_j, y_k \ rechts) \ log_ {2 } \ left [\ frac {1} {p \ left (x_j \ mid y_k \ right)} \ right] $
Unter Berücksichtigung der beiden Unsicherheitsbedingungen (vor und nach dem Anwenden der Eingänge) stellen wir nun fest, dass die Differenz, dh $ H (x) - H (x \ mid y) $, die Unsicherheit über den aufgelösten Kanaleingang darstellen muss durch Beobachtung des Kanalausgangs.
Dies wird als das bezeichnet Mutual Information des Kanals.
Wenn wir die gegenseitige Information als $ I (x; y) $ bezeichnen, können wir das Ganze wie folgt in eine Gleichung schreiben
$$ I (x; y) = H (x) - H (x \ mid y) $$
Daher ist dies die gleichwertige Darstellung der gegenseitigen Information.
Eigenschaften der gegenseitigen Information
Dies sind die Eigenschaften der gegenseitigen Information.
Die gegenseitige Information eines Kanals ist symmetrisch.
$$ I (x; y) = I (y; x) $$
Gegenseitige Informationen sind nicht negativ.
$$ I (x; y) \ geq 0 $$
Gegenseitige Informationen können als Entropie des Kanalausgangs ausgedrückt werden.
$$ I (x; y) = H (y) - H (y \ mid x) $$
Wobei $ H (y \ mid x) $ eine bedingte Entropie ist
Die gegenseitige Information eines Kanals hängt mit der gemeinsamen Entropie des Kanaleingangs und des Kanalausgangs zusammen.
$$ I (x; y) = H (x) + H (y) - H (x, y) $$
Wobei die gemeinsame Entropie $ H (x, y) $ definiert ist durch
$$ H (x, y) = \ Anzeigestil \ Summe \ Grenzen_ {j = 0} ^ {j-1} \ Anzeigestil \ Summe \ Grenzen_ {k = 0} ^ {k-1} p (x_j, y_k) \ log_ {2} \ left (\ frac {1} {p \ left (x_i, y_k \ right)} \ right) $$
Kanalkapazität
Wir haben bisher gegenseitige Informationen besprochen. Die maximale durchschnittliche gegenseitige Information in einem Moment eines Signalisierungsintervalls, wenn sie von einem diskreten speicherlosen Kanal übertragen wird, die Wahrscheinlichkeiten der Rate der maximal zuverlässigen Datenübertragung, kann als die verstanden werdenchannel capacity.
Es wird mit bezeichnet C und wird gemessen in bits per channel verwenden.
Diskrete speicherlose Quelle
Eine Quelle, von der die Daten in aufeinanderfolgenden Intervallen ausgegeben werden, unabhängig von vorherigen Werten, kann als bezeichnet werden discrete memoryless source.
Diese Quelle ist diskret, da sie nicht für ein kontinuierliches Zeitintervall, sondern in diskreten Zeitintervallen berücksichtigt wird. Diese Quelle ist speicherlos, da sie zu jedem Zeitpunkt frisch ist, ohne die vorherigen Werte zu berücksichtigen.
Der von einer diskreten speicherlosen Quelle erzeugte Code muss effizient dargestellt werden, was ein wichtiges Problem bei der Kommunikation darstellt. Dazu gibt es Codewörter, die diese Quellcodes darstellen.
In der Telegraphie verwenden wir beispielsweise Morsecode, in dem die Alphabete mit gekennzeichnet sind Marks und Spaces. Wenn der BriefE wird berücksichtigt, was meistens verwendet wird, es wird mit bezeichnet “.” Während der Brief Q was selten verwendet wird, wird mit bezeichnet “--.-”
Schauen wir uns das Blockdiagramm an.
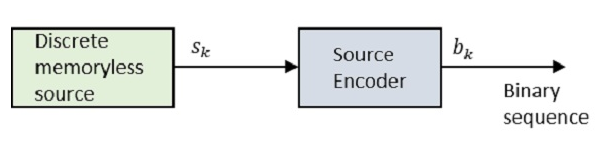
Wo Sk ist der Ausgang der diskreten speicherlosen Quelle und bk ist der Ausgang des Quellcodierers, der durch dargestellt wird 0s und 1s.
Die codierte Sequenz ist so, dass sie bequem am Empfänger decodiert wird.
Nehmen wir an, dass die Quelle ein Alphabet mit hat k verschiedene Symbole und dass die kth Symbol Sk tritt mit der Wahrscheinlichkeit auf Pk, wo k = 0, 1…k-1.
Lassen Sie das dem Symbol zugewiesene Binärcodewort Skdurch den Encoder mit Länge lk, gemessen in Bits.
Daher definieren wir die durchschnittliche Codewortlänge L des Quellcodierers als
$$ \ overline {L} = \ displaystyle \ sum \ limit_ {k = 0} ^ {k-1} p_kl_k $$
L repräsentiert die durchschnittliche Anzahl von Bits pro Quellensymbol
Wenn $ L_ {min} = \: Minimum \: möglich \: Wert \: von \: \ overline {L} $
Dann coding efficiency kann definiert werden als
$$ \ eta = \ frac {L {min}} {\ overline {L}} $$
Mit $ \ overline {L} \ geq L_ {min} $ haben wir $ \ eta \ leq 1 $
Der Quellcodierer wird jedoch als effizient angesehen, wenn $ \ eta = 1 $ ist
Dazu muss der Wert $ L_ {min} $ ermittelt werden.
Wir beziehen uns auf die Definition: „Bei einer diskreten speicherlosen Entropiequelle $ H (\ delta) $ ist die durchschnittliche CodewortlängeL für jede Quellcodierung ist $ \ overline {L} \ geq H (\ delta) $ begrenzt. "
In einfacheren Worten ist das Codewort (Beispiel: Morsecode für das Wort QUEUE ist -.- ..- .. ..) immer größer oder gleich dem Quellcode (QUEUE im Beispiel). Das heißt, die Symbole im Codewort sind größer oder gleich den Alphabeten im Quellcode.
Daher kann mit $ L_ {min} = H (\ delta) $ die Effizienz des Quellcodierers in Bezug auf die Entropie $ H (\ delta) $ wie folgt geschrieben werden
$$ \ eta = \ frac {H (\ delta)} {\ overline {L}} $$
Dieser Quellcodierungssatz wird als bezeichnet noiseless coding theoremwie es eine fehlerfreie Codierung herstellt. Es wird auch als bezeichnetShannon’s first theorem.
Das in einem Kanal vorhandene Rauschen erzeugt unerwünschte Fehler zwischen den Eingangs- und Ausgangssequenzen eines digitalen Kommunikationssystems. Die Fehlerwahrscheinlichkeit sollte sehr gering sein,nearly ≤ 10-6 für eine zuverlässige Kommunikation.
Die Kanalcodierung in einem Kommunikationssystem führt Redundanz mit einer Steuerung ein, um die Zuverlässigkeit des Systems zu verbessern. Die Quellcodierung reduziert die Redundanz, um die Effizienz des Systems zu verbessern.
Die Kanalcodierung besteht aus zwei Aktionsteilen.
Mapping eingehende Datensequenz in eine Kanaleingangssequenz.
Inverse Mapping die Kanalausgangssequenz in eine Ausgangsdatensequenz.
Das endgültige Ziel ist, dass die Gesamtwirkung der channel noise sollte minimiert werden.
Die Zuordnung erfolgt durch den Sender mit Hilfe eines Codierers, während die inverse Zuordnung durch den Decodierer im Empfänger erfolgt.
Kanalcodierung
Betrachten wir einen diskreten speicherlosen Kanal (δ) mit Entropie H (δ)
Ts gibt die Symbole an, die δ pro Sekunde gibt
Die Kanalkapazität wird durch angezeigt C
Kanal kann für jeden verwendet werden Tc sek
Daher ist die maximale Fähigkeit des Kanals C/Tc
Die gesendeten Daten = $ \ frac {H (\ delta)} {T_s} $
Wenn $ \ frac {H (\ delta)} {T_s} \ leq \ frac {C} {T_c} $, bedeutet dies, dass die Übertragung gut ist und mit einer geringen Fehlerwahrscheinlichkeit reproduziert werden kann.
Dabei ist $ \ frac {C} {T_c} $ die kritische Rate der Kanalkapazität.
Wenn $ \ frac {H (\ delta)} {T_s} = \ frac {C} {T_c} $, signalisiert das System mit einer kritischen Rate.
Wenn umgekehrt $ \ frac {H (\ delta)} {T_s}> \ frac {C} {T_c} $ ist, ist die Übertragung nicht möglich.
Daher ist die maximale Übertragungsrate gleich der kritischen Rate der Kanalkapazität für zuverlässige fehlerfreie Nachrichten, die über einen diskreten speicherlosen Kanal stattfinden können. Dies wird als bezeichnetChannel coding theorem.
Rauschen oder Fehler ist das Hauptproblem im Signal, das die Zuverlässigkeit des Kommunikationssystems stört. Error control codingist das Codierungsverfahren, mit dem das Auftreten von Fehlern kontrolliert wird. Diese Techniken helfen bei der Fehlererkennung und Fehlerkorrektur.
Abhängig von den auf sie angewendeten mathematischen Prinzipien gibt es viele verschiedene Fehlerkorrekturcodes. In der Vergangenheit wurden diese Codes jedoch klassifiziertLinear block codes und Convolution codes.
Lineare Blockcodes
In den linearen Blockcodes haben die Paritätsbits und Nachrichtenbits eine lineare Kombination, was bedeutet, dass das resultierende Codewort die lineare Kombination von zwei beliebigen Codewörtern ist.
Betrachten wir einige Datenblöcke, die enthalten kBits in jedem Block. Diese Bits werden mit den Blöcken abgebildet, die habennBits in jedem Block. Hiern ist größer als k. Der Sender fügt redundante Bits hinzu(n-k)Bits. Das Verhältnisk/n ist der code rate. Es wird mit bezeichnetr und der Wert von r ist r < 1.
Das (n-k) hier hinzugefügte Bits sind parity bits. Paritätsbits helfen bei der Fehlererkennung und Fehlerkorrektur sowie beim Auffinden der Daten. In den übertragenen Daten entsprechen die am weitesten links liegenden Bits des Codeworts den Nachrichtenbits, und die am weitesten rechts liegenden Bits des Codeworts entsprechen den Paritätsbits.
Systematischer Code
Jeder lineare Blockcode kann ein systematischer Code sein, bis er geändert wird. Daher wird ein unveränderter Blockcode als a bezeichnetsystematic code.
Es folgt die Darstellung der structure of code wordentsprechend ihrer Zuordnung.

Wenn die Nachricht nicht geändert wird, wird sie als systematischer Code aufgerufen. Dies bedeutet, dass die Verschlüsselung der Daten die Daten nicht ändern sollte.
Faltungscodes
Bisher haben wir in den linearen Codes diskutiert, dass systematischer unveränderter Code bevorzugt wird. Hier sind die Daten von totaln Bits, wenn übertragen, k Bits sind Nachrichtenbits und (n-k) Bits sind Paritätsbits.
Während des Codierungsprozesses werden die Paritätsbits von den gesamten Daten subtrahiert und die Nachrichtenbits werden codiert. Jetzt werden die Paritätsbits erneut hinzugefügt und die gesamten Daten werden erneut codiert.
Die folgende Abbildung zeigt ein Beispiel für Datenblöcke und Datenströme, die zur Übertragung von Informationen verwendet werden.
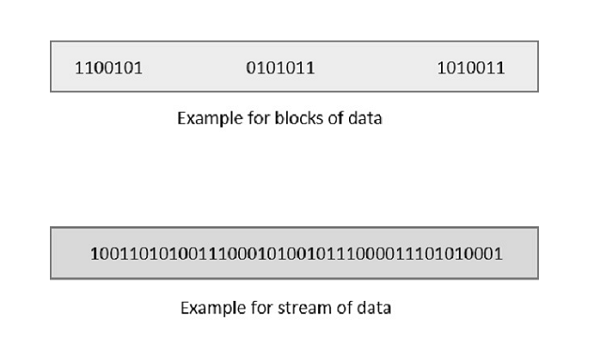
Der gesamte oben genannte Prozess ist langwierig und hat Nachteile. Die Zuweisung von Puffer ist hier ein Hauptproblem, wenn das System ausgelastet ist.
Dieser Nachteil wird in Faltungscodes behoben. Wobei dem gesamten Datenstrom Symbole zugewiesen und dann übertragen werden. Da die Daten ein Bitstrom sind, wird kein Puffer zum Speichern benötigt.
Hamming-Codes
Die Linearitätseigenschaft des Codeworts besteht darin, dass die Summe zweier Codewörter auch ein Codewort ist. Hamming-Codes sind die Art vonlinear error correcting Codes, die bis zu zwei Bitfehler erkennen oder Ein-Bit-Fehler korrigieren können, ohne dass nicht korrigierte Fehler erkannt werden.
Während der Verwendung der Hamming-Codes werden zusätzliche Paritätsbits verwendet, um einen einzelnen Bitfehler zu identifizieren. Um von einem Bitmuster zum anderen zu gelangen, müssen einige Bits in den Daten geändert werden. Eine solche Anzahl von Bits kann als bezeichnet werdenHamming distance. Wenn die Parität einen Abstand von 2 hat, kann ein Ein-Bit-Flip erkannt werden. Dies kann jedoch nicht korrigiert werden. Außerdem können keine Zwei-Bit-Flips erkannt werden.
Hamming-Code ist jedoch ein besseres Verfahren als die zuvor diskutierten bei der Fehlererkennung und -korrektur.
BCH-Codes
BCH-Codes sind nach den Erfindern benannt Bose, Chaudari und Hocquenghem. Während des BCH-Code-Entwurfs wird die Anzahl der zu korrigierenden Symbole gesteuert, und daher ist eine Mehrbitkorrektur möglich. BCH-Codes sind eine leistungsstarke Technik zur Fehlerkorrektur von Codes.
Für alle positiven ganzen Zahlen m ≥ 3 und t < 2m-1Es gibt einen BCH-Binärcode. Es folgen die Parameter eines solchen Codes.
Blocklänge n = 2m-1
Anzahl der Paritätsprüfstellen n - k ≤ mt
Mindestabstand dmin ≥ 2t + 1
Dieser Code kann als aufgerufen werden t-error-correcting BCH code.
Zyklische Codes
Die zyklische Eigenschaft von Codewörtern besteht darin, dass jede zyklische Verschiebung eines Codeworts auch ein Codewort ist. Zyklische Codes folgen dieser zyklischen Eigenschaft.
Für einen linearen Code C, wenn jedes Codewort dh C = (C1, C2, ...... Cn)von C hat eine zyklische Rechtsverschiebung von Komponenten, es wird ein Codewort. Diese Rechtsverschiebung ist gleichn-1zyklische Linksverschiebungen. Daher ist es bei jeder Verschiebung unveränderlich. Also der lineare CodeC, da es bei jeder Verschiebung unveränderlich ist, kann als a bezeichnet werden Cyclic code.
Zyklische Codes werden zur Fehlerkorrektur verwendet. Sie werden hauptsächlich zur Korrektur von Doppelfehlern und Burst-Fehlern verwendet.
Dies sind also einige Fehlerkorrekturcodes, die am Empfänger zu erkennen sind. Diese Codes verhindern, dass Fehler auftreten, und stören die Kommunikation. Sie verhindern auch, dass das Signal von unerwünschten Empfängern abgehört wird. Hierzu gibt es eine Klasse von Signalisierungstechniken, die im nächsten Kapitel erläutert werden.
Eine kollektive Klasse von Signalisierungstechniken wird vor dem Senden eines Signals verwendet, um eine sichere Kommunikation bereitzustellen, die als bekannt ist Spread Spectrum Modulation. Der Hauptvorteil der Spreizspektrum-Kommunikationstechnik besteht darin, eine beabsichtigte oder unbeabsichtigte „Interferenz“ zu verhindern.
Die mit diesen Techniken modulierten Signale sind schwer zu stören und können nicht gestört werden. Ein Eindringling ohne offiziellen Zugang darf sie niemals knacken. Daher werden diese Techniken für militärische Zwecke verwendet. Diese Spreizspektrumsignale senden mit geringer Leistungsdichte und haben eine breite Signalverteilung.
Pseudo-Noise-Sequenz
Eine codierte Sequenz von 1s und 0s mit bestimmten Autokorrelationseigenschaften, genannt als Pseudo-Noise coding sequencewird in Spreizspektrumtechniken verwendet. Es handelt sich um eine Sequenz maximaler Länge, bei der es sich um eine Art zyklischen Code handelt.
Schmalband- und Spread-Spektrum-Signale
Sowohl das Schmalband- als auch das Spreizspektrumsignal können leicht verstanden werden, indem ihr Frequenzspektrum beobachtet wird, wie in den folgenden Figuren gezeigt.
Schmalbandsignale
Bei den Schmalbandsignalen ist die Signalstärke wie in der folgenden Abbildung des Frequenzspektrums gezeigt konzentriert.
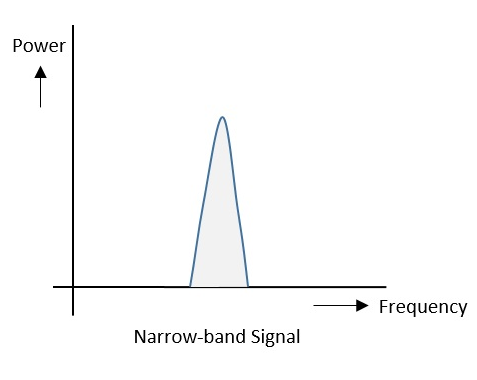
Im Folgenden sind einige seiner Funktionen aufgeführt:
- Das Signalband belegt einen engen Frequenzbereich.
- Die Leistungsdichte ist hoch.
- Die Energieverteilung ist gering und konzentriert.
Obwohl die Eigenschaften gut sind, sind diese Signale störanfällig.
Spreizspektrumsignale
Die Spreizspektrumsignale haben die Signalstärke verteilt, wie in der folgenden Frequenzspektrumfigur gezeigt.
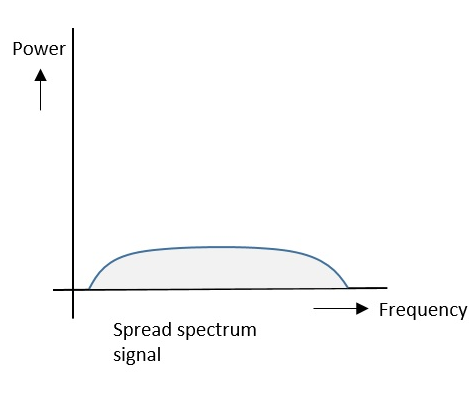
Im Folgenden sind einige seiner Funktionen aufgeführt:
- Das Signalband belegt einen weiten Frequenzbereich.
- Die Leistungsdichte ist sehr gering.
- Energie ist weit verbreitet.
Mit diesen Merkmalen sind die Spreizspektrumsignale sehr widerstandsfähig gegen Interferenzen oder Störungen. Da mehrere Benutzer dieselbe Bandbreite des Spreizspektrums gemeinsam nutzen können, ohne sich gegenseitig zu stören, können diese als bezeichnet werdenmultiple access techniques.
FHSS und DSSS / CDMA
Bei Mehrfachzugriffstechniken mit verteiltem Spektrum werden Signale verwendet, deren Übertragungsbandbreite um eine Größenordnung größer ist als die minimal erforderliche HF-Bandbreite.
Es gibt zwei Arten.
- Frequenzsprung-Spreizspektrum (FHSS)
- Direct Sequence Spread Spectrum (DSSS)
Frequenzsprung-Spreizspektrum (FHSS)
Hierbei handelt es sich um eine Frequenzsprungtechnik, bei der die Benutzer die Nutzungshäufigkeiten in einem bestimmten Zeitintervall von einem zum anderen ändern müssen frequency hopping. Beispielsweise wurde Absender 1 für einen bestimmten Zeitraum eine Frequenz zugewiesen. Nach einer Weile springt Sender 1 zur anderen Frequenz und Sender 2 verwendet die erste Frequenz, die zuvor von Sender 1 verwendet wurde. Dies wird als bezeichnetfrequency reuse.
Die Frequenzen der Daten werden von einem zum anderen gesprungen, um eine sichere Übertragung zu gewährleisten. Die Zeit, die für jeden Frequenzsprung aufgewendet wird, wird als bezeichnetDwell time.
Direct Sequence Spread Spectrum (DSSS)
Wann immer ein Benutzer Daten mit dieser DSSS-Technik senden möchte, wird jedes einzelne Bit der Benutzerdaten mit einem Geheimcode multipliziert, der als bezeichnet wird chipping code. Dieser Chipping-Code ist nichts anderes als der Spreizcode, der mit der ursprünglichen Nachricht multipliziert und übertragen wird. Der Empfänger verwendet denselben Code, um die ursprüngliche Nachricht abzurufen.
Vergleich zwischen FHSS und DSSS / CDMA
Beide Spread-Spectrum-Techniken sind wegen ihrer Eigenschaften beliebt. Um ein klares Verständnis zu haben, werfen wir einen Blick auf ihre Vergleiche.
| FHSS | DSSS / CDMA |
|---|---|
| Es werden mehrere Frequenzen verwendet | Es wird eine einzelne Frequenz verwendet |
| Es ist zu jedem Zeitpunkt schwierig, die Frequenz des Benutzers zu finden | Einmal zugewiesene Benutzerhäufigkeit ist immer gleich |
| Die Wiederverwendung von Frequenzen ist zulässig | Die Wiederverwendung von Frequenzen ist nicht zulässig |
| Der Absender muss nicht warten | Der Absender muss warten, wenn das Spektrum belegt ist |
| Die Leistungsstärke des Signals ist hoch | Die Stärke des Signals ist gering |
| Stärker und dringt durch die Hindernisse | Es ist schwächer als FHSS |
| Es ist niemals von Störungen betroffen | Es kann durch Störungen beeinträchtigt werden |
| Es ist günstiger | Es ist teuer |
| Dies ist die häufig verwendete Technik | Diese Technik wird nicht häufig verwendet |
Vorteile des Spreizspektrums
Im Folgenden sind die Vorteile des Spreizspektrums aufgeführt:
- Beseitigung von Übersprechen
- Bessere Ausgabe mit Datenintegrität
- Reduzierter Effekt des Mehrweg-Fading
- Bessere Sicherheit
- Geräuschreduzierung
- Koexistenz mit anderen Systemen
- Längere operative Entfernungen
- Schwer zu erkennen
- Nicht einfach zu demodulieren / dekodieren
- Es ist schwierig, die Signale zu stören
Obwohl Spread-Spectrum-Techniken ursprünglich für militärische Zwecke entwickelt wurden, werden sie heute in großem Umfang für kommerzielle Zwecke eingesetzt.