Propriétés des transformations en Z
Z-Transform a les propriétés suivantes:
Propriété de linéarité
Si $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
et $ \, y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} Y (Z) $
Alors la propriété de linéarité indique que
$ a \, x (n) + b \, y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} a \, X (Z) + b \, Y (Z) $
Propriété de décalage temporel
Si $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
Ensuite, la propriété Time shifting indique que
$ x (nm) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} z ^ {- m} X (Z) $
Multiplication par propriété de séquence exponentielle
Si $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
Ensuite, la multiplication par une propriété de séquence exponentielle indique que
$ a ^ n \,. x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z / a) $
Propriété d'inversion de temps
Si $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
Ensuite, la propriété d'inversion de temps indique que
$ x (-n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (1 / Z) $
Différenciation dans le domaine Z OU multiplication par n propriété
Si $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
Ensuite, la multiplication par n ou la différenciation dans la propriété du domaine z indique que
$ n ^ kx (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} [-1] ^ kz ^ k {d ^ k X (Z) \ over dZ ^ K} $
Propriété de convolution
Si $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
et $ \, y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} Y (Z) $
Ensuite, la propriété de convolution indique que
$ x (n) * y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) .Y (Z) $
Propriété de corrélation
Si $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
et $ \, y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} Y (Z) $
Ensuite, la propriété de corrélation indique que
$ x (n) \ otimes y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) .Y (Z ^ {- 1}) $
Théorèmes de la valeur initiale et de la valeur finale
Les théorèmes de valeur initiale et de valeur finale de la transformée en z sont définis pour le signal causal.
Théorème de la valeur initiale
Pour un signal causal x (n), le théorème de la valeur initiale indique que
$ x (0) = \ lim_ {z \ to \ infty} X (z) $
Ceci est utilisé pour trouver la valeur initiale du signal sans prendre de transformation en z inverse
Théorème de la valeur finale
Pour un signal causal x (n), le théorème de la valeur finale déclare que
$ x (\ infty) = \ lim_ {z \ à 1} [z-1] X (z) $
Ceci est utilisé pour trouver la valeur finale du signal sans prendre de transformation en z inverse.
Région de convergence (ROC) de Z-Transform
La plage de variation de z pour laquelle converge la transformée z est appelée région de convergence de la transformée z.
Propriétés du ROC des transformations en Z
Le ROC de la transformée z est indiqué par un cercle dans le plan z.
ROC ne contient aucun pôle.
Si x (n) est une séquence causale de durée finie ou une séquence du côté droit, alors le ROC est le plan z entier sauf à z = 0.
Si x (n) est une séquence anti-causale de durée finie ou une séquence du côté gauche, alors le ROC est le plan z entier sauf à z = ∞.
Si x (n) est une suite causale de durée infinie, ROC est extérieur au cercle de rayon aie | z | > a.
Si x (n) est une suite anti-causale de durée infinie, ROC est à l'intérieur du cercle de rayon aie | z | <a.
Si x (n) est une séquence à deux côtés de durée finie, alors le ROC est le plan z entier sauf à z = 0 & z = ∞.
Le concept de ROC peut être expliqué par l'exemple suivant:
Example 1: Trouver z-transform et ROC de $ a ^ nu [n] + a ^ {-} nu [-n-1] $
$ ZT [a ^ nu [n]] + ZT [a ^ {- n} u [-n-1]] = {Z \ sur Za} + {Z \ sur Z {-1 \ sur a}} $
$$ ROC: | z | \ gt a \ quad \ quad ROC: | z | \ lt {1 \ sur un} $$
Le tracé de ROC a deux conditions comme a> 1 et a <1, car vous ne connaissez pas a.

Dans ce cas, il n'y a pas de combinaison ROC.
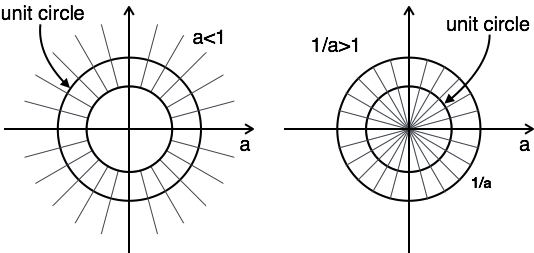
Ici, la combinaison de ROC est de $ a \ lt | z | \ lt {1 \ sur un} $
Par conséquent, pour ce problème, la transformée en z est possible lorsque a <1.
Causalité et stabilité
La condition de causalité pour les systèmes LTI à temps discret est la suivante:
Un système LTI à temps discret est causal lorsque
ROC est en dehors du pôle le plus extérieur.
Dans La fonction de transfert H [Z], l'ordre du numérateur ne peut pas être supérieur à l'ordre du dénominateur.
Condition de stabilité pour les systèmes LTI à temps discret
Un système LTI à temps discret est stable lorsque
sa fonction système H [Z] inclut le cercle unitaire | z | = 1.
tous les pôles de la fonction de transfert se trouvaient à l'intérieur du cercle unitaire | z | = 1.
Transformation en Z des signaux de base
| x (t) | X [Z] |
|---|---|
| $ \ delta $ | 1 |
| $ u (n) $ | $ {Z \ sur Z-1} $ |
| $ u (-n-1) $ | $ - {Z \ sur Z-1} $ |
| $ \ delta (nm) $ | $ z ^ {- m} $ |
| $ a ^ nu [n] $ | $ {Z \ over Za} $ |
| $ a ^ nu [-n-1] $ | $ - {Z \ sur Za} $ |
| $ n \, a ^ nu [n] $ | $ {aZ \ over | Za | ^ 2} $ |
| $ n \, a ^ nu [-n-1] $ | $ - {aZ \ over | Za | ^ 2} $ |
| $ a ^ n \ cos \ omega nu [n] $ | $ {Z ^ 2-aZ \ cos \ omega \ over Z ^ 2-2aZ \ cos \ omega + a ^ 2} $ |
| $ a ^ n \ sin \ omega nu [n] $ | $ {aZ \ sin \ omega \ over Z ^ 2 -2aZ \ cos \ omega + a ^ 2} $ |