Chuyển đổi quan điểm
Khi mắt người nhìn thấy những vật ở gần, họ trông to hơn so với những người ở xa. Đây được gọi là phối cảnh một cách tổng quát. Trong khi phép chuyển đổi là việc chuyển một đối tượng, v.v. từ trạng thái này sang trạng thái khác.
Vì vậy, về tổng thể, phép chuyển đổi phối cảnh liên quan đến việc chuyển đổi thế giới 3d thành hình ảnh 2D. Cùng một nguyên tắc mà thị giác của con người hoạt động và cùng một nguyên tắc mà máy ảnh hoạt động.
Chúng ta sẽ xem chi tiết lý do tại sao điều này xảy ra, rằng những đối tượng ở gần bạn trông lớn hơn, trong khi những đối tượng ở xa trông nhỏ hơn mặc dù chúng trông lớn hơn khi bạn tiếp cận.
Chúng ta sẽ bắt đầu cuộc thảo luận này bằng khái niệm hệ quy chiếu:
Khung tham chiếu:
Hệ quy chiếu về cơ bản là một tập hợp các giá trị liên quan đến việc chúng ta đo lường một thứ gì đó.
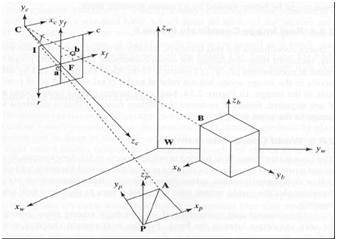
5 hệ quy chiếu
Để phân tích thế giới / hình ảnh / cảnh 3D, cần có 5 khung tham chiếu khác nhau.
- Object
- World
- Camera
- Image
- Pixel
Khung tọa độ đối tượng
Khung tọa độ đối tượng được sử dụng để mô hình hóa các đối tượng. Ví dụ, kiểm tra xem một đối tượng cụ thể có ở một vị trí thích hợp so với đối tượng kia hay không. Nó là một hệ tọa độ 3d.
Khung tọa độ thế giới
Khung tọa độ thế giới được sử dụng cho các đối tượng đồng liên quan trong thế giới 3 chiều. Nó là một hệ tọa độ 3d.
Khung tọa độ máy ảnh
Khung tọa độ máy ảnh được sử dụng để liên kết các đối tượng với máy ảnh. Nó là một hệ tọa độ 3d.
Khung tọa độ hình ảnh
Nó không phải là một hệ tọa độ 3d, đúng hơn nó là một hệ thống 2d. Nó được sử dụng để mô tả cách các điểm 3d được ánh xạ trong mặt phẳng hình ảnh 2d.
Khung tọa độ pixel
Nó cũng là một hệ tọa độ 2d. Mỗi pixel có một giá trị tọa độ pixel.
Chuyển đổi giữa 5 khung này
Đó là cách một cảnh 3D được chuyển đổi thành 2d, với hình ảnh của các pixel.
Bây giờ chúng ta sẽ giải thích khái niệm này bằng toán học.
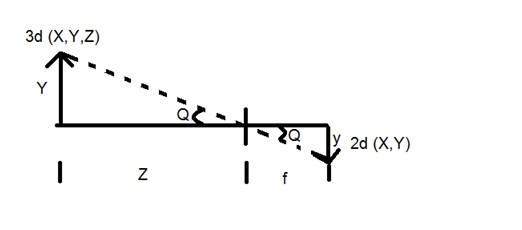
Ở đâu
Y = vật thể 3d
y = 2d Hình ảnh
f = độ dài tiêu cự của máy ảnh
Z = khoảng cách giữa vật thể và máy ảnh
Bây giờ có hai góc khác nhau được tạo thành trong phép biến hình này được biểu diễn bằng Q.
Góc đầu tiên là
Trường hợp dấu trừ biểu thị hình ảnh đó bị đảo ngược. Góc thứ hai được tạo thành là:

So sánh hai phương trình này, chúng tôi nhận được

Từ phương trình này, chúng ta có thể thấy rằng khi các tia sáng phản xạ trở lại sau khi chiếu từ vật thể, truyền từ máy ảnh, một hình ảnh đảo ngược được hình thành.
Chúng ta có thể hiểu rõ hơn về điều này, với ví dụ này.
Ví dụ
Tính kích thước của hình ảnh được tạo thành
Giả sử người ta chụp ảnh một người cao 5m, đứng cách máy ảnh 50m và cho biết ảnh của người đó có kích thước như thế nào, với máy ảnh có tiêu cự là 50mm.
Giải pháp:
Vì độ dài tiêu cự tính bằng milimét, vì vậy chúng ta phải chuyển đổi mọi thứ sang milimét để tính toán nó.
Vì thế,
Y = 5000 mm.
f = 50 mm.
Z = 50000 mm.
Đặt các giá trị trong công thức, chúng tôi nhận được

= -5 mm.
Một lần nữa, dấu trừ cho biết hình ảnh bị đảo ngược.