रडार सिस्टम - विलंब रेखा रद्द करने वाले
इस अध्याय में, हम रडार सिस्टम में देरी रेखा रद्द करने वालों के बारे में जानेंगे। जैसा कि नाम से पता चलता है, विलंब रेखा एक निश्चित मात्रा में विलंब का परिचय देती है। तो, देरी लाइन का उपयोग मुख्य रूप से देरी लाइन कैनसेलर में किया जाता है ताकि एक परिचय हो सकेdelay नाड़ी पुनरावृत्ति समय का।
Delay line cancellerएक फिल्टर है, जो स्थिर लक्ष्यों से प्राप्त गूंज संकेतों के डीसी घटकों को समाप्त करता है। इसका मतलब है, यह गैर-स्थिर लक्ष्यों से प्राप्त गूंज संकेतों के एसी घटकों को अनुमति देता है, अर्थात, लक्ष्यीकरण।
देरी लाइन रद्द करने वालों के प्रकार
विलंब रेखा रद्द करने वालों को निम्नलिखित में वर्गीकृत किया जा सकता है two types इसमें मौजूद विलंब लाइनों की संख्या के आधार पर।
- एकल विलंब रेखा रद्द करना
- डबल विलंब रेखा रद्द करना
अपने बाद के अनुभागों में, हम इन दोनों देरी लाइन के बारे में अधिक चर्चा करेंगे।
एकल विलंब रेखा रद्द करना
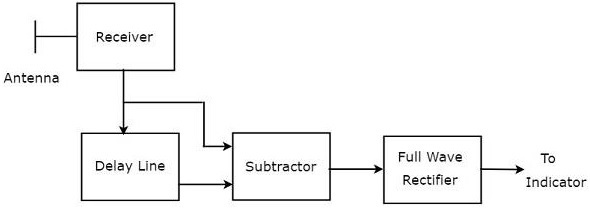
देरी लाइन और एक सबट्रैक्टर के संयोजन को देरी लाइन कैंसेलर के रूप में जाना जाता है। इसे सिंगल डिली लाइन कैनसेलर भी कहा जाता है। block diagram एकल विलंब रेखा के साथ एमटीआई रिसीवर की संख्या नीचे चित्र में दिखाई गई है।
हम लिख सकते हैं mathematical equation डॉपलर प्रभाव के बाद प्राप्त प्रतिध्वनि संकेत के रूप में -
$ $ V_1 = A \ sin \ left [2 \ pi f_dt- \ phi_0 \ right] \: \: \: \: \: \: समीकरण \: 1 $ $
कहाँ पे,
ए वीडियो सिग्नल का आयाम है
$ f_d $ डॉपलर आवृत्ति है
$ \ phi_o $ चरण बदलाव है और यह $ 4 \ pi f_tR_o / C $ के बराबर है
हमें मिलेगा output of Delay line canceller, समीकरण 1 में $ t-T_P $ द्वारा $ $ $ की जगह।
$ $ V_2 = A \ sin \ बाएँ [2 \ pi f_d \ left (t-T_P \ right) - \ phi_0 \ right] \: \: \: \: \: समीकरण \: 2 $ $
कहाँ पे,
$ T_P $ नाड़ी पुनरावृत्ति का समय है
हमें मिलेगा subtractor output समीकरण 1 से समीकरण 2 को घटाकर।
$ $ V_1-V_2 = A \ sin \ left [2 \ pi f_dt- \ phi_0 \ right] -A \ sin \ left [2 \ pi f_d \ left (t-T_P \ right) - phi_0 \ right] $ $
$$ \ Rightarrow V_1-V_2 = 2A \ sin \ बाएँ [\ frac {2 \ pi f_dt- \ phi_0- \ left [2 \ pi f_d \ left (t-T_PP का दायाँ) - \ phi_0 \ right]} {2 } \ right] \ cos \ left [\ frac {2 \ pi f_dt- \ phi_o + 2 \ pi f_d \ left (t-T_P \ right) - \ phi_0} {2} [दायां] $$
$$ V_1-V_2 = 2A \ sin \ बाएँ [\ frac {2 \ pi f_dT_P} {2} \ right] \ cos \ left [\ frac {2 \ pi f_d \ left (2t-T_P \ right) -2 \ _ phi_0} {2} \ right] $ $
$$ \ Rightarrow V_1-V_2 = 2A \ sin \ बाएँ [\ pi f_dT_p \ right] \ cos \ left [2 \ pi f_d \ left (t- \ frac {T_P} [2} \ right) - \ phi_0 \ right ] \: \: \: \: \: समीकरण \: 3 $$
घटाव का आउटपुट फुल वेव रेक्टिफायर के इनपुट के रूप में लगाया जाता है। इसलिए, फुल वेव रेक्टिफायर का आउटपुट निम्न आकृति में दिखाया गया है। यह और कुछ नहीं हैfrequency response एकल विलंब रेखा कैंसेलर।

समीकरण 3 से, हम देख सकते हैं कि एकल विलंब रेखा के कैंसेलर की आवृत्ति प्रतिक्रिया शून्य हो जाती है, जब $ \ pi f_dT_P $ के बराबर होता है integer multiples of $ \ pi $ इसका अर्थ है, $ \ pi f_dT_P $ $ n \ pi $ के बराबर है, यह लिखा जा सकता है
$$ \ pi f_dT_P = n \ pi $$
$$ \ Rightarrow f_dT_P = n $$
$$ \ Rightarrow f_d = \ frac {n} {T_P} \: \: \: \: \: \: समीकरण \: 4 $ $
समीकरण 4 से, हम यह निष्कर्ष निकाल सकते हैं कि एकल विलंब रेखा कैंसेलर की आवृत्ति प्रतिक्रिया शून्य हो जाती है, जब डॉपलर आवृत्ति $ f_d $ नाड़ी पुनरावृत्ति समय $ T_P $ के पारस्परिक गुणक के बराबर होती है।
हम नाड़ी पुनरावृत्ति समय और नाड़ी पुनरावृत्ति आवृत्ति के बीच निम्नलिखित संबंध जानते हैं।
$$ f_d = \ frac {1} {} T_P $$
$$ \ Rightarrow \ frac {1} {T_P} = f_P \: \: \: \: \: \ समीकरण: 5 $
हम समीकरण 4 में समीकरण 5 को प्रतिस्थापित करके, निम्नलिखित समीकरण प्राप्त करेंगे।
$$ \ Rightarrow f_d = nf_P \: \: \: \: \: \: समीकरण \: 6 $ +
समीकरण 6 से, हम यह निष्कर्ष निकाल सकते हैं कि एकल विलंब रेखा कैंसेलर की आवृत्ति प्रतिक्रिया शून्य हो जाती है, जब डॉपलर आवृत्ति, $ f_d $ नाड़ी पुनरावृत्ति आवृत्ति $ f_P $ के पूर्णांक गुणकों के बराबर होती है।
अंधा गति
अब तक हमने जो कुछ भी सीखा, सिंगल डिली लाइन कैंसेलर स्थिर लक्ष्यों से प्राप्त गूंज संकेतों के डीसी घटकों को समाप्त करता है, जब $ n $ शून्य के बराबर होता है। इसके अलावा, यह गैर-स्थिर लक्ष्यों से प्राप्त प्रतिध्वनि संकेतों के एसी घटकों को भी समाप्त कर देता है, जब डॉपलर आवृत्ति $ f_d $ पूर्णांक के बराबर होती है(other than zero) पल्स पुनरावृत्ति आवृत्ति के गुणकों $ f_P $।
तो, सापेक्ष वेग, जिसके लिए एकल विलंब रेखा कैंसेलर की आवृत्ति प्रतिक्रिया शून्य हो जाती है, कहा जाता है blind speeds। गणितीय रूप से, हम नेत्रहीन गति $ v_n $ के लिए अभिव्यक्ति लिख सकते हैं -
$$ v_n = \ frac {n \ लैम्ब्डा} {2T_P} \: \: \: \: \: समीकरण \: 7 $$
$$ \ Rightarrow v_n = \ frac {n \ lambda f_P} {2} \: \: \: \: \: \: समीकरण \: 8 $ $
कहाँ पे,
$ n $ एक पूर्णांक है और यह 1, 2, 3 और इसी तरह के बराबर है
$ \ lambda $ ऑपरेटिंग तरंग दैर्ध्य है
उदाहरण समस्या
एक MTI रडार $ 1KHZ $ की पल्स पुनरावृत्ति आवृत्ति के साथ $ 6GHZ $ की आवृत्ति पर संचालित होता है। पहला, दूसरा और तीसरा खोजेंblind speeds इस राडार की।
उपाय
दिया हुआ,
एमटीआई रडार की परिचालन आवृत्ति, $ f = 6GHZ $
पल्स पुनरावृत्ति आवृत्ति, $ f_P = 1KHZ $।
निम्नलिखित के लिए सूत्र है operating wavelength ऑपरेटिंग आवृत्ति के संदर्भ में $ \ lambda $, f।
$$ \ lambda = \ frac {सी} {च} $$
उपर्युक्त समीकरण में स्थानापन्न, $ C = 3 \ times10 ^ 8m / sec $ और $ f = 6GZ $।
$$ \ lambda = \ frac {3 \ times10 ^ 8} {6 \ times10 ^ 9} $$
$$ \ Rightarrow \ lambda = 0.05m $ $
ऐसा operating wavelength $ \ lambda $ $ 0.05m $ के बराबर है, जब ऑपरेटिंग आवृत्ति f $ 6GHZ $ है।
हम निम्नलिखित जानते हैं formula for blind speed।
$ $ v_n = \ frac {n \ lambda f_p} {2} $ $
उपर्युक्त समीकरण में, $ n $ = 1,2 और 3 को प्रतिस्थापित करके, हम क्रमशः पहले, दूसरे और तीसरे अंधे गति के लिए निम्नलिखित समीकरण प्राप्त करेंगे।
$ $ v_1 = \ frac {1 \ गुना \ lambda f_p} {2} = \ frac {\ lambda f_p} {2} $ $
$ $ v_2 = \ frac {2 \ गुना \ lambda f_p} {2} = 2 \ left (\ frac {\ lambda f_p} {2} \ right) = 2v_1 $$
$ $ v_3 = \ frac {3 \ गुना \ lambda f_p} {2} = 3 \ left (\ frac {\ lambda f_p} {2} \ right) = 3v_1 $ $
Substitute पहली अंधी गति के समीकरण में $ \ lambda $ और $ f_P $ के मूल्य।
$ $ v_1 = \ frac {0.05 \ बार 10 ^ 3} {2} $ $
$$ \ Rightarrow v_1 = 25 मीटर / सेकंड $
इसलिए first blind speed $ v_1 $ दिए गए विनिर्देशों के लिए $ 25m / sec $ के बराबर है।
हम मान लेंगे second & third blind speeds $ 50m / sec के रूप में $ & $ 75m / sec $ क्रमशः दूसरे और 1 अंधी गति के समीकरणों में 1 के मूल्य को प्रतिस्थापित करके।
डबल विलंब रेखा रद्द करना
हम जानते हैं कि एक एकल विलंब रेखा कैंसेलर में एक विलंब रेखा और एक घटाव होता है। यदि इस तरह की दो देरी लाइन कैंसलरों को एक साथ कैस्केड किया जाता है, तो उस संयोजन को डबल विलंब लाइन कैंसेलर कहा जाता है। block diagram डबल विलंब रेखा के कैंसेलर को निम्न आकृति में दिखाया गया है।

$ P \ बाएँ (t \ दाएँ) $ और $ q \ बाएँ (t \ दाएँ) $ इनपुट और पहली विलंब रेखा कैंसेलर का आउटपुट हो। हम निम्नलिखित गणितीय संबंध प्राप्त करेंगेfirst delay line canceller।
$ $ q \ बाएँ (t \ दाएँ) = p \ बाएँ (t \ दाएँ) -p \ बाएँ (t-T_P \ दाएँ) \: \: \: \: \: \: समीकरण \: ९ $ $
पहली देरी लाइन कैंसेलर के आउटपुट को दूसरी देरी लाइन कैंसेलर के इनपुट के रूप में लागू किया जाता है। इसलिए, $ q \ left (t \ right) $ दूसरी विलंब रेखा कैंसेलर का इनपुट होगा। $ R \ left (t \ right) को $ दूसरी विलंब रेखा के कैंसेलर का आउटपुट होने दें। हम निम्नलिखित गणितीय संबंध से प्राप्त करेंगेsecond delay line canceller।
$ $ r \ बाएँ (t \ दाएँ) = q \ बाएँ (t \ दाएँ) -q \ बाएँ (t-T_P \ दाएँ) \: \: \: \: \: \: समीकरण \: १० $ $
समीकरण 9 में $ t-T_P $ द्वारा $ t $ बदलें।
$ $ q \ बा (t-T_P \ right) = p \ left (t-T_P \ right) -p \ left (t-T_P-T_P \ right) $$
$ $ q \ बा (t-T_P \ right) = p \ left (t-T_P \ right) -p \ बाएँ (t-2T_P \ right) \: \: \: \: \: \: समीकरण \: 11%
Substitute, समीकरण 9 और समीकरण 11 समीकरण 10 में।
$ $ r \ बाएँ (t \ दाएँ) = p \ बाएँ (t \ दाएँ) -p \ बाएँ (t-T_P \ दाएँ) - \ बाएँ [p \ बाएँ (t-T_P \ दाएँ) -p \ बाएँ (t) -2T_P \ right) \ right] $ $
$$ \ Rightarrow r \ बाएँ (t \ दाएँ) = p \ बाएँ (t \ दाएँ) -2p \ बाएँ (t-T_P \ दाएँ) + p \ बाएँ (t-2T_P \ दाएँ) \: \: \: \: \। : \: समीकरण \: 12 $$
advantageडबल विलम्ब लाइन कैंसिलर की यह है कि यह अव्यवस्था को मोटे तौर पर अस्वीकार कर देता है। दो देरी लाइन कैंसलरों का उत्पादन, जो कैस्केड किया जाता है, एकल विलंब लाइन कैंसेलर के आउटपुट के वर्ग के बराबर होगा।
तो, डबल देरी लाइन कैंसेलर के आउटपुट का परिमाण, जो MTI रडार रिसीवर पर मौजूद है, $ 4A ^ 2 \ _ (\ sin \ left [\ pi f_dT_P \ right] \ right) 2 $ के बराबर होगा।

डबल विलंब लाइन कैंसलर की आवृत्ति प्रतिक्रिया विशेषताओं और दो विलंब लाइन कैंसलरों के कैस्केड संयोजन समान हैं। advantage समय की देरी की वजह से लाइन कैंसिलर है कि यह सभी आवृत्ति श्रेणियों के लिए संचालित किया जा सकता है।