Proprietà delle trasformazioni Z.
Z-Transform ha le seguenti proprietà:
Proprietà di linearità
Se $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
e $ \, y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} Y (Z) $
Quindi la proprietà di linearità lo afferma
$ a \, x (n) + b \, y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} a \, X (Z) + b \, Y (Z) $
Proprietà Time Shifting
Se $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
Quindi la proprietà Time shifting lo afferma
$ x (nm) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} z ^ {- m} X (Z) $
Moltiplicazione per proprietà della sequenza esponenziale
Se $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
Quindi la moltiplicazione per una proprietà di sequenza esponenziale lo afferma
$ a ^ n \,. x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z / a) $
Proprietà di inversione temporale
Se $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
Quindi la proprietà di inversione temporale lo afferma
$ x (-n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (1 / Z) $
Differenziazione nel dominio Z OR Moltiplicazione per n proprietà
Se $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
Quindi la moltiplicazione per n o la differenziazione nella proprietà del dominio z lo afferma
$ n ^ kx (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} [-1] ^ kz ^ k {d ^ k X (Z) \ over dZ ^ K} $
Proprietà di convoluzione
Se $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
e $ \, y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} Y (Z) $
Quindi la proprietà di convoluzione lo afferma
$ x (n) * y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) .Y (Z) $
Proprietà di correlazione
Se $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
e $ \, y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} Y (Z) $
Quindi la proprietà di correlazione lo afferma
$ x (n) \ otimes y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) .Y (Z ^ {- 1}) $
Teoremi del valore iniziale e del valore finale
I teoremi del valore iniziale e del valore finale della trasformata z sono definiti per il segnale causale.
Teorema del valore iniziale
Per un segnale causale x (n), il teorema del valore iniziale lo afferma
$ x (0) = \ lim_ {z \ to \ infty} X (z) $
Viene utilizzato per trovare il valore iniziale del segnale senza prendere la trasformata z inversa
Teorema del valore finale
Per un segnale causale x (n), il teorema del valore finale lo afferma
$ x (\ infty) = \ lim_ {z \ to 1} [z-1] X (z) $
Questo è usato per trovare il valore finale del segnale senza prendere la trasformata z inversa.
Regione di Convergenza (ROC) di Z-Transform
L'intervallo di variazione di z per cui converge la trasformata z è chiamato regione di convergenza della trasformata z.
Proprietà del ROC delle trasformate Z.
Il ROC della trasformata z è indicato con un cerchio nel piano z.
ROC non contiene pali.
Se x (n) è una sequenza causale di durata finita o una sequenza del lato destro, allora il ROC è l'intero piano z eccetto per z = 0.
Se x (n) è una sequenza anti-causale di durata finita o una sequenza del lato sinistro, allora il ROC è l'intero piano z tranne che in z = ∞.
Se x (n) è una sequenza causale di durata infinita, ROC è esterno al cerchio con raggio aie | z | > a.
Se x (n) è una sequenza anti-causale di durata infinita, ROC è l'interno del cerchio con raggio aie | z | <a.
Se x (n) è una sequenza a due lati di durata finita, il ROC è l'intero piano z eccetto per z = 0 & z = ∞.
Il concetto di ROC può essere spiegato dal seguente esempio:
Example 1: Trova la trasformazione Z e il ROC di $ a ^ nu [n] + a ^ {-} nu [-n-1] $
$ ZT [a ^ nu [n]] + ZT [a ^ {- n} u [-n-1]] = {Z \ over Za} + {Z \ over Z {-1 \ over a}} $
$$ ROC: | z | \ gt a \ quad \ quad ROC: | z | \ lt {1 \ su un} $$
Il grafico di ROC ha due condizioni come a> 1 e a <1, poiché non conosci a.

In questo caso, non esiste una combinazione ROC.
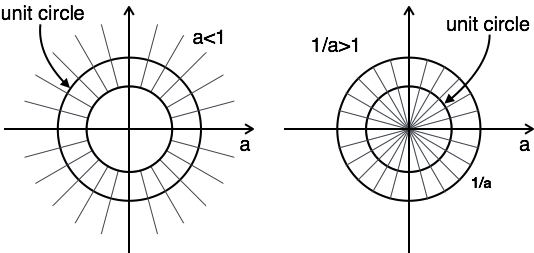
Qui, la combinazione di ROC è da $ a \ lt | z | \ lt {1 \ su un} $
Quindi per questo problema, la trasformazione z è possibile quando a <1.
Causalità e stabilità
La condizione di causalità per i sistemi LTI a tempo discreto è la seguente:
Un sistema LTI a tempo discreto è causale quando
ROC è al di fuori del polo più esterno.
Nella funzione di trasferimento H [Z], l'ordine del numeratore non può essere superiore all'ordine del denominatore.
Condizione di stabilità per sistemi LTI a tempo discreto
Un sistema LTI a tempo discreto è stabile quando
la sua funzione di sistema H [Z] include il cerchio unitario | z | = 1.
tutti i poli della funzione di trasferimento si trovano all'interno del cerchio unitario | z | = 1.
Trasformata Z dei segnali di base
| x (t) | X [Z] |
|---|---|
| $ \ delta $ | 1 |
| $ u (n) $ | $ {Z \ over Z-1} $ |
| $ u (-n-1) $ | $ - {Z \ over Z-1} $ |
| $ \ delta (nm) $ | $ z ^ {- m} $ |
| $ a ^ nu [n] $ | $ {Z \ over Za} $ |
| $ a ^ nu [-n-1] $ | $ - {Z \ over Za} $ |
| $ n \, a ^ nu [n] $ | $ {aZ \ over | Za | ^ 2} $ |
| $ n \, a ^ nu [-n-1] $ | $ - {aZ \ over | Za | ^ 2} $ |
| $ a ^ n \ cos \ omega nu [n] $ | $ {Z ^ 2-aZ \ cos \ omega \ over Z ^ 2-2aZ \ cos \ omega + a ^ 2} $ |
| $ a ^ n \ sin \ omega nu [n] $ | $ {aZ \ sin \ omega \ over Z ^ 2 -2aZ \ cos \ omega + a ^ 2} $ |