ระบบเรดาร์ - ตัวยกเลิกสายล่าช้า
ในบทนี้เราจะเรียนรู้เกี่ยวกับ Delay Line Cancellers ในระบบเรดาร์ ตามชื่อที่แนะนำเส้นดีเลย์จะแสดงความล่าช้าจำนวนหนึ่ง ดังนั้นเส้นหน่วงเวลาส่วนใหญ่จะใช้ในตัวยกเลิกสายล่าช้าเพื่อแนะนำไฟล์delay ของเวลาการทำซ้ำของชีพจร
Delay line cancellerเป็นตัวกรองซึ่งกำจัดส่วนประกอบ DC ของสัญญาณสะท้อนที่ได้รับจากเป้าหมายที่อยู่นิ่ง ซึ่งหมายความว่าอนุญาตให้ส่วนประกอบ AC ของสัญญาณสะท้อนที่ได้รับจากเป้าหมายที่ไม่อยู่นิ่งเช่นเป้าหมายที่เคลื่อนที่
ประเภทของ Delay Line Cancellers
ตัวยกเลิกสายล่าช้าสามารถแบ่งออกได้ดังต่อไปนี้ two types ตามจำนวนเส้นหน่วงเวลาที่มีอยู่
- Single Delay Line Canceller
- Double Delay Line Canceller
ในส่วนต่อไปเราจะพูดถึงเพิ่มเติมเกี่ยวกับตัวยกเลิกสายล่าช้าทั้งสองนี้
Single Delay Line Canceller
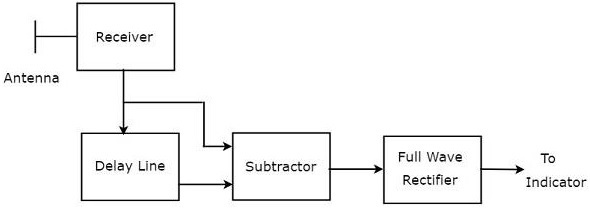
การรวมกันของเส้นหน่วงเวลาและตัวลบเรียกว่าตัวยกเลิกบรรทัดล่าช้า เรียกอีกอย่างว่า single Delay line Canceller block diagram ของตัวรับ MTI พร้อมตัวยกเลิกสาย Delay เดียวแสดงในรูปด้านล่าง
เราสามารถเขียนไฟล์ mathematical equation ของสัญญาณสะท้อนที่ได้รับหลังจากเอฟเฟกต์ Doppler เป็น -
$$ V_1 = A \ sin \ left [2 \ pi f_dt- \ phi_0 \ right] \: \: \: \: \: สมการ \: 1 $$
ที่ไหน
A คือความกว้างของสัญญาณวิดีโอ
$ f_d $ คือความถี่ Doppler
$ \ phi_o $ คือการเลื่อนเฟสและเท่ากับ $ 4 \ pi f_tR_o / C $
เราจะได้รับไฟล์ output of Delay line cancellerโดยแทนที่ $ t $ ด้วย $ t-T_P $ ในสมการ 1
$$ V_2 = A \ sin \ left [2 \ pi f_d \ left (t-T_P \ right) - \ phi_0 \ right] \: \: \: \: \: สมการ \: 2 $$
ที่ไหน
$ T_P $ คือเวลาการทำซ้ำของพัลส์
เราจะได้รับไฟล์ subtractor output โดยการลบสมการ 2 ออกจากสมการ 1
$$ V_1-V_2 = A \ sin \ left [2 \ pi f_dt- \ phi_0 \ right] -A \ sin \ left [2 \ pi f_d \ left (t-T_P \ right) - \ phi_0 \ right] $$
$$ \ Rightarrow V_1-V_2 = 2A \ sin \ left [\ frac {2 \ pi f_dt- \ phi_0- \ left [2 \ pi f_d \ left (t-T_P \ right) - \ phi_0 \ right]} {2 } \ right] \ cos \ left [\ frac {2 \ pi f_dt- \ phi_o + 2 \ pi f_d \ left (t-T_P \ right) - \ phi_0} {2} \ right] $$
$$ V_1-V_2 = 2A \ sin \ left [\ frac {2 \ pi f_dT_P} {2} \ right] \ cos \ left [\ frac {2 \ pi f_d \ left (2t-T_P \ right) -2 \ phi_0} {2} \ right] $$
$$ \ Rightarrow V_1-V_2 = 2A \ sin \ left [\ pi f_dT_p \ right] \ cos \ left [2 \ pi f_d \ left (t- \ frac {T_P} {2} \ right) - \ phi_0 \ right ] \: \: \: \: \: สมการ \: 3 $$
เอาต์พุตของตัวลบถูกนำไปใช้เป็นอินพุตไปยัง Full Wave Rectifier ดังนั้นผลลัพธ์ของ Full Wave Rectifier จึงมีลักษณะดังแสดงในรูปต่อไปนี้ มันไม่มีอะไรนอกจากfrequency response ของตัวยกเลิกสายล่าช้าเดี่ยว

จากสมการที่ 3 เราสามารถสังเกตได้ว่าการตอบสนองความถี่ของตัวยกเลิกบรรทัดล่าช้าเดี่ยวจะกลายเป็นศูนย์เมื่อ $ \ pi f_dT_P $ เท่ากับ integer multiples of $ \ pi $ ซึ่งหมายความว่า $ \ pi f_dT_P $ เท่ากับ $ n \ pi $ ทางคณิตศาสตร์สามารถเขียนเป็น
$$ \ pi f_dT_P = n \ pi $$
$$ \ Rightarrow f_dT_P = n $$
$$ \ Rightarrow f_d = \ frac {n} {T_P} \: \: \: \: \: สมการ \: 4 $$
จากสมการ 4 เราสามารถสรุปได้ว่าการตอบสนองความถี่ของตัวยกเลิกบรรทัดล่าช้าเดี่ยวกลายเป็นศูนย์เมื่อความถี่ Doppler $ f_d $ เท่ากับจำนวนเต็มทวีคูณของเวลาการทำซ้ำพัลส์ซึ่งกันและกัน $ T_P $
เราทราบความสัมพันธ์ดังต่อไปนี้ระหว่างเวลาการทำซ้ำของพัลส์และความถี่การทำซ้ำของพัลส์
$$ f_d = \ frac {1} {T_P} $$
$$ \ Rightarrow \ frac {1} {T_P} = f_P \: \: \: \: \: สมการ \: 5 $$
เราจะได้สมการต่อไปนี้โดยแทนที่สมการ 5 ในสมการ 4
$$ \ Rightarrow f_d = nf_P \: \: \: \: \: สมการ \: 6 $$
จากสมการที่ 6 เราสามารถสรุปได้ว่าการตอบสนองความถี่ของตัวยกเลิกการหน่วงเวลาบรรทัดเดียวกลายเป็นศูนย์เมื่อความถี่ดอปเลอร์ $ f_d $ เท่ากับจำนวนเต็มทวีคูณของความถี่การทำซ้ำพัลส์ $ f_P $
ความเร็วตาบอด
จากสิ่งที่เราเรียนรู้จนถึงตอนนี้ตัวยกเลิกสาย Delay เดี่ยวจะกำจัดส่วนประกอบ DC ของสัญญาณสะท้อนที่ได้รับจากเป้าหมายที่อยู่นิ่งเมื่อ $ n $ เท่ากับศูนย์ นอกจากนั้นยังกำจัดส่วนประกอบ AC ของสัญญาณสะท้อนที่ได้รับจากเป้าหมายที่ไม่อยู่นิ่งเมื่อความถี่ Doppler $ f_d $ เท่ากับจำนวนเต็ม(other than zero) ทวีคูณของความถี่การทำซ้ำพัลส์ $ f_P $
ดังนั้นความเร็วสัมพัทธ์ที่เรียกว่าการตอบสนองความถี่ของตัวยกเลิกบรรทัดล่าช้าเดี่ยวจะกลายเป็นศูนย์ blind speeds. ในทางคณิตศาสตร์เราสามารถเขียนนิพจน์สำหรับความเร็วตาบอด $ v_n $ as -
$$ v_n = \ frac {n \ lambda} {2T_P} \: \: \: \: \: สมการ \: 7 $$
$$ \ Rightarrow v_n = \ frac {n \ lambda f_P} {2} \: \: \: \: \: สมการ \: 8 $$
ที่ไหน
$ n $ เป็นจำนวนเต็มและเท่ากับ 1, 2, 3 และอื่น ๆ
$ \ lambda $ คือความยาวคลื่นปฏิบัติการ
ตัวอย่างปัญหา
MTI Radar ทำงานที่ความถี่ $ 6GHZ $ โดยมีความถี่ในการทำซ้ำของพัลส์ที่ $ 1KHZ $ ค้นหาที่หนึ่งสองและสามblind speeds ของเรดาร์นี้
วิธีการแก้
ให้
ความถี่ในการทำงานของ MTI Radar, $ f = 6GHZ $
ความถี่การทำซ้ำของพัลส์ $ f_P = 1KHZ $
ต่อไปนี้เป็นสูตรสำหรับ operating wavelength $ \ lambda $ ในแง่ของความถี่ในการทำงาน f.
$$ \ lambda = \ frac {C} {f} $$
แทนที่ $ C = 3 \ times10 ^ 8m / วินาที $ และ $ f = 6GHZ $ ในสมการข้างต้น
$$ \ lambda = \ frac {3 \ times10 ^ 8} {6 \ times10 ^ 9} $$
$$ \ Rightarrow \ lambda = 0.05 ล้าน $$
ดังนั้น operating wavelength $ \ lambda $ เท่ากับ $ 0.05m $ เมื่อความถี่ในการทำงาน f เท่ากับ $ 6GHZ $
เราทราบสิ่งต่อไปนี้ formula for blind speed.
$$ v_n = \ frac {n \ lambda f_p} {2} $$
โดยการแทนที่ $ n $ = 1,2 & 3 ในสมการข้างต้นเราจะได้สมการต่อไปนี้สำหรับความเร็วตาบอดที่หนึ่งวินาทีและสามตามลำดับ
$$ v_1 = \ frac {1 \ times \ lambda f_p} {2} = \ frac {\ lambda f_p} {2} $$
$$ v_2 = \ frac {2 \ times \ lambda f_p} {2} = 2 \ left (\ frac {\ lambda f_p} {2} \ right) = 2v_1 $$
$$ v_3 = \ frac {3 \ times \ lambda f_p} {2} = 3 \ left (\ frac {\ lambda f_p} {2} \ right) = 3v_1 $$
Substitute ค่าของ $ \ lambda $ และ $ f_P $ ในสมการของความเร็วตาบอดแรก
$$ v_1 = \ frac {0.05 \ times 10 ^ 3} {2} $$
$$ \ Rightarrow v_1 = 25 นาที / วินาที $$
ดังนั้นไฟล์ first blind speed $ v_1 $ เท่ากับ $ 25m / sec $ สำหรับข้อกำหนดที่กำหนด
เราจะได้รับค่าของ second & third blind speeds เป็น $ 50m / วินาที $ & $ 75m / วินาที $ ตามลำดับโดยแทนที่ค่าของ 1 ในสมการของความเร็วตาบอดที่สองและสาม
Double Delay Line Canceller
เรารู้ว่าตัวยกเลิกบรรทัดล่าช้าเดี่ยวประกอบด้วยเส้นหน่วงเวลาและตัวลบ หากตัวยกเลิกสายล่าช้าดังกล่าวสองตัวเรียงต่อกันจะเรียกชุดค่าผสมนั้นเรียกว่าตัวยกเลิกสายล่าช้าคู่ block diagram ของตัวยกเลิกสายล่าช้าสองเท่าจะแสดงในรูปต่อไปนี้

ให้ $ p \ left (t \ right) $ และ $ q \ left (t \ right) $ เป็นอินพุตและเอาต์พุตของตัวยกเลิกบรรทัดการหน่วงเวลาแรก เราจะได้รับความสัมพันธ์ทางคณิตศาสตร์ต่อไปนี้จากfirst delay line canceller.
$$ q \ left (t \ right) = p \ left (t \ right) -p \ left (t-T_P \ right) \: \: \: \: \: Equation \: 9 $$
เอาต์พุตของตัวยกเลิกบรรทัดการหน่วงเวลาแรกถูกนำไปใช้เป็นอินพุตไปยังตัวยกเลิกบรรทัดการหน่วงเวลาที่สอง ดังนั้น $ q \ left (t \ right) $ จะเป็นอินพุตของตัวยกเลิกบรรทัดการหน่วงเวลาที่สอง ให้ $ r \ left (t \ right) $ เป็นเอาต์พุตของตัวยกเลิกบรรทัดการหน่วงเวลาที่สอง เราจะได้รับความสัมพันธ์ทางคณิตศาสตร์ต่อไปนี้จากsecond delay line canceller.
$$ r \ left (t \ right) = q \ left (t \ right) -q \ left (t-T_P \ right) \: \: \: \: \: Equation \: 10 $$
แทนที่ $ t $ ด้วย $ t-T_P $ ในสมการ 9
$$ q \ left (t-T_P \ right) = p \ left (t-T_P \ right) -p \ left (t-T_P-T_P \ right) $$
$$ q \ left (t-T_P \ right) = p \ left (t-T_P \ right) -p \ left (t-2T_P \ right) \: \: \: \: \: สมการ \: 11 $$
Substitute, สมการ 9 และสมการ 11 ในสมการ 10.
$$ r \ left (t \ right) = p \ left (t \ right) -p \ left (t-T_P \ right) - \ left [p \ left (t-T_P \ right) -p \ left (t -2T_P \ right) \ right] $$
$$ \ Rightarrow r \ left (t \ right) = p \ left (t \ right) -2p \ left (t-T_P \ right) + p \ left (t-2T_P \ right) \: \: \: \ : \: สมการ \: 12 $$
advantageของตัวยกเลิกสายล่าช้าสองครั้งคือมันปฏิเสธความยุ่งเหยิงในวงกว้าง เอาต์พุตของตัวยกเลิกสายหน่วงเวลาสองตัวซึ่งเรียงซ้อนกันจะเท่ากับกำลังสองของเอาต์พุตของตัวยกเลิกสายหน่วงเวลาเดี่ยว
ดังนั้นขนาดของเอาต์พุตของตัวยกเลิกสายหน่วงเวลาคู่ซึ่งมีอยู่ที่ตัวรับเรดาร์ MTI จะเท่ากับ 4A ^ 2 \ left (\ sin \ left [\ pi f_dT_P \ right] \ right) ^ 2 $

ลักษณะการตอบสนองความถี่ของตัวยกเลิกสายการหน่วงเวลาสองครั้งและการรวมกันของตัวยกเลิกสายการหน่วงเวลาสองสายเหมือนกัน advantage ตัวยกเลิกบรรทัดล่าช้าของโดเมนเวลาคือสามารถใช้งานได้กับทุกช่วงความถี่