ระบบเรดาร์ - เรดาร์ติดตาม
เรดาร์ซึ่งใช้ในการติดตามเส้นทางของเป้าหมายหนึ่งหรือหลายเป้าหมายเรียกว่า Tracking Radar. โดยทั่วไปจะทำหน้าที่ต่อไปนี้ก่อนที่จะเริ่มกิจกรรมการติดตาม
- การตรวจจับเป้าหมาย
- ช่วงของเป้าหมาย
- การหามุมเงยและมุมแอซิมัท
- ค้นหา Doppler frequency shift
ดังนั้นเรดาร์ติดตามจะติดตามเป้าหมายโดยการติดตามหนึ่งในสามพารามิเตอร์ ได้แก่ ช่วงมุมการเปลี่ยนความถี่ดอปเลอร์ เรดาร์ติดตามส่วนใหญ่ใช้นามสกุลprinciple of tracking in angle. ตอนนี้ให้เราคุยกันว่าการติดตามเชิงมุมคืออะไร
การติดตามเชิงมุม
คานดินสอของเสาอากาศเรดาร์ทำการติดตามในมุม แกนของเสาอากาศเรดาร์ถือเป็นทิศทางอ้างอิง หากทิศทางของเป้าหมายและทิศทางอ้างอิงไม่เหมือนกันก็จะมีangular errorซึ่งไม่มีอะไรนอกจากความแตกต่างระหว่างสองทิศทาง
หากสัญญาณผิดพลาดเชิงมุมถูกนำไปใช้กับระบบควบคุมเซอร์โวสัญญาณจะเคลื่อนแกนของเสาอากาศเรดาร์ไปยังทิศทางของเป้าหมาย ทั้งแกนของเสาอากาศเรดาร์และทิศทางของเป้าหมายจะcoincideเมื่อข้อผิดพลาดเชิงมุมเป็นศูนย์ มีกลไกป้อนกลับในเรดาร์ติดตามซึ่งทำงานจนกว่าข้อผิดพลาดเชิงมุมจะกลายเป็นศูนย์
ต่อไปนี้คือไฟล์ two techniquesซึ่งใช้ในการติดตามเชิงมุม
- Lobing ตามลำดับ
- การสแกนรูปกรวย
ตอนนี้ให้เราพูดคุยเกี่ยวกับสองเทคนิคนี้ทีละคน
Lobing ตามลำดับ
หากคานเสาอากาศถูกสลับไปมาระหว่างสองรูปแบบสลับกันเพื่อติดตามเป้าหมายจะเรียกว่า sequential lobing. เรียกอีกอย่างว่าการสลับตามลำดับและการสลับกลีบ เทคนิคนี้ใช้เพื่อค้นหาข้อผิดพลาดเชิงมุมในพิกัดเดียว ให้รายละเอียดทั้งขนาดและทิศทางของข้อผิดพลาดเชิงมุม
รูปต่อไปนี้แสดงตัวอย่างของการเรียงลำดับตามลำดับใน polar coordinates.
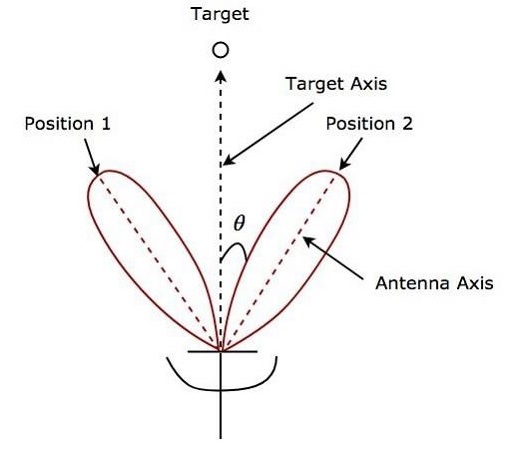
ดังแสดงในรูปคานเสาอากาศจะสลับระหว่างตำแหน่ง 1 และตำแหน่ง 2 สลับกัน ข้อผิดพลาดเชิงมุมθระบุไว้ในรูปด้านบน การล็อกตามลำดับทำให้ตำแหน่งของเป้าหมายมีความแม่นยำสูง นี่คือหลักadvantage ของ lobing ตามลำดับ
การสแกนรูปกรวย
หากลำแสงของเสาอากาศหมุนอย่างต่อเนื่องเพื่อติดตามเป้าหมายจะเรียกว่า conical scanning. การมอดูเลตการสแกนทรงกรวยใช้เพื่อค้นหาตำแหน่งของเป้าหมาย รูปต่อไปนี้แสดงตัวอย่างของการสแกนรูปกรวย

Squint angleคือมุมระหว่างแกนลำแสงและแกนหมุนและแสดงไว้ในรูปด้านบน สัญญาณสะท้อนที่ได้รับจากเป้าหมายจะได้รับการมอดูเลตที่ความถี่เท่ากับความถี่ที่ลำแสงของเสาอากาศหมุน
มุมระหว่างทิศทางของชิ้นงานและแกนหมุนเป็นตัวกำหนด amplitude of the modulated signal. ดังนั้นการมอดูเลตการสแกนรูปกรวยจะต้องถูกแยกออกจากสัญญาณสะท้อนจากนั้นจึงนำไปใช้กับระบบควบคุมเซอร์โวซึ่งจะเคลื่อนแกนลำแสงของเสาอากาศไปยังทิศทางของเป้าหมาย