デジタル通信-クイックガイド
私たちの日常生活の中で発生するコミュニケーションは、信号の形で行われます。音声信号などのこれらの信号は、一般に、本質的にアナログです。通信を離れた場所で確立する必要がある場合、アナログ信号は、効果的な伝送のためにさまざまな手法を使用して、有線で送信されます。
デジタル化の必要性
従来の通信方法では、長距離通信にアナログ信号を使用していましたが、歪み、干渉、セキュリティ違反などの損失が多く発生していました。
これらの問題を克服するために、信号はさまざまな技術を使用してデジタル化されます。デジタル化された信号により、通信が失われることなく、より明確で正確になります。
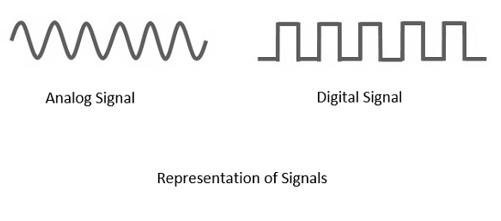
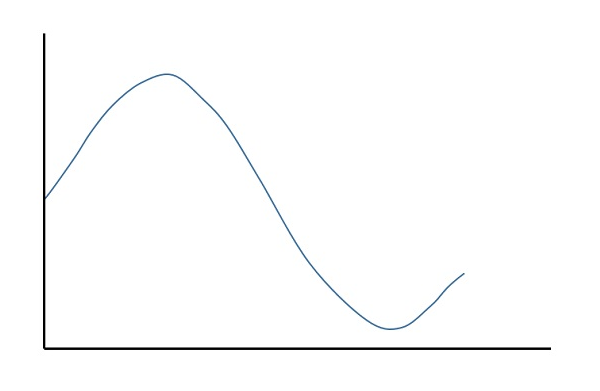
次の図は、アナログ信号とデジタル信号の違いを示しています。デジタル信号はで構成されています1s そして 0s それぞれHighとLowの値を示します。
デジタル通信の利点
信号がデジタル化されると、アナログ通信よりもデジタル通信の方が多くの利点があります。
歪み、ノイズ、干渉の影響は、影響が少ないため、デジタル信号でははるかに少なくなります。
デジタル回路はより信頼性があります。
デジタル回路は設計が簡単で、アナログ回路よりも安価です。
デジタル回路のハードウェア実装は、アナログよりも柔軟性があります。
クロストークの発生は、デジタル通信では非常にまれです。
パルスはその特性を変更するために高い外乱を必要とするため、信号は変更されません。これは非常に困難です。
暗号化や圧縮などの信号処理機能は、情報の機密性を維持するためにデジタル回路で採用されています。
エラー検出およびエラー訂正コードを使用することにより、エラー発生の可能性が低減されます。
スペクトラム拡散技術は、信号妨害を回避するために使用されます。
時分割多重(TDM)を使用してデジタル信号を結合することは、周波数分割多重(FDM)を使用してアナログ信号を結合するよりも簡単です。
デジタル信号の構成プロセスは、アナログ信号よりも簡単です。
デジタル信号は、アナログ信号よりも便利に保存および取得できます。
デジタル回路の多くは、ほぼ一般的なエンコード技術を備えているため、同様のデバイスをさまざまな目的に使用できます。
チャネルの容量は、デジタル信号によって効果的に利用されます。
デジタル通信の要素
デジタル通信システムを構成する要素は、理解しやすいように次のブロック図で表されます。
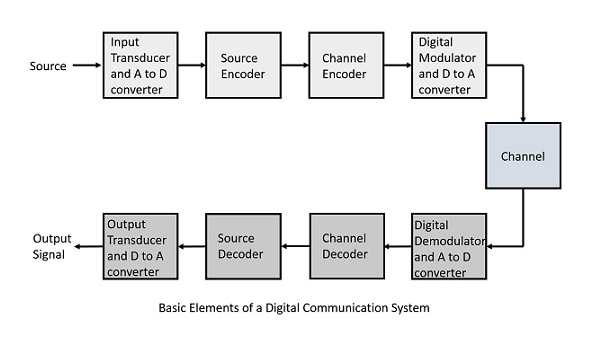
以下は、デジタル通信システムのセクションです。
ソース
ソースは analog 信号。 Example:音声信号
入力トランスデューサ
これは、物理的な入力を受け取り、それを電気信号に変換するトランスデューサーです(Example:マイク)。このブロックも構成されていますanalog to digital さらなるプロセスのためにデジタル信号が必要なコンバーター。
デジタル信号は通常、バイナリシーケンスで表されます。
ソースエンコーダ
ソースエンコーダは、データを最小ビット数に圧縮します。このプロセスは、帯域幅の効果的な利用に役立ちます。冗長ビット(不要な余分なビット、つまりゼロ)を削除します。
チャネルエンコーダ
チャネルエンコーダは、エラー訂正のためのコーディングを行います。信号の送信中に、チャネル内のノイズのために信号が変更される可能性があるため、これを回避するために、チャネルエンコーダは送信データに冗長ビットを追加します。これらはエラー訂正ビットです。
デジタル変調器
送信される信号は、ここではキャリアによって変調されます。信号は、チャネルまたはメディアを通過するように、デジタルシーケンスからアナログに変換されます。
チャネル
チャネルまたは媒体は、アナログ信号が送信機側から受信機側に送信できるようにします。
デジタル復調器
これは、レシーバー側の最初のステップです。受信信号は復調されるだけでなく、アナログからデジタルに再度変換されます。信号はここで再構築されます。
チャネルデコーダー
チャネルデコーダは、シーケンスを検出した後、いくつかのエラー訂正を行います。送信中に発生する可能性のある歪みは、冗長ビットを追加することで修正されます。このビットの追加は、元の信号の完全な回復に役立ちます。
ソースデコーダー
得られた信号は、サンプリングと量子化によって再びデジタル化されるため、情報を失うことなく純粋なデジタル出力が得られます。ソースデコーダーはソース出力を再作成します。
出力トランスデューサ
これは、信号を送信機の入力にあった元の物理形式に変換する最後のブロックです。電気信号を物理出力に変換します(Example:ラウドスピーカー)。
出力信号
これは、プロセス全体の後に生成される出力です。 Example −受信した音声信号。
このユニットは、デジタル通信の導入、信号のデジタル化、利点、および要素を扱いました。次の章では、デジタル通信の概念について詳しく学びます。
Modulation メッセージ信号の瞬時値に応じて、キャリア信号の1つまたは複数のパラメータを変更するプロセスです。
メッセージ信号は通信用に送信される信号であり、キャリア信号はデータのない高周波信号ですが、長距離伝送に使用されます。
使用する変調のタイプに応じて分類される多くの変調技術があります。それらすべての中で、使用されるデジタル変調技術はPulse Code Modulation (PCM)。
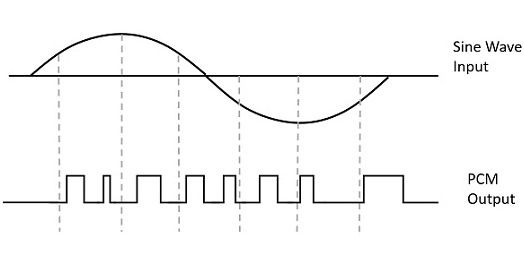
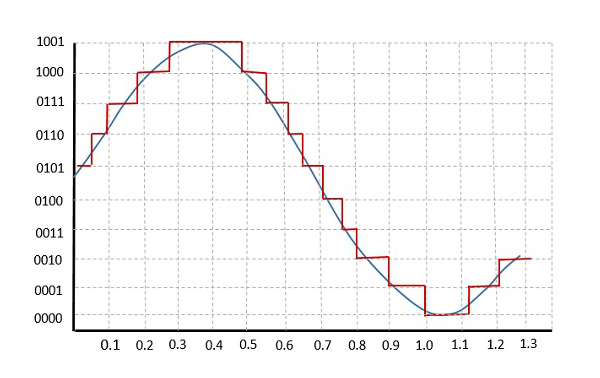
信号はパルス符号変調され、アナログ情報をバイナリシーケンスに変換します。 1s そして 0s。PCMの出力は、バイナリシーケンスに似ています。次の図は、特定の正弦波の瞬時値に関するPCM出力の例を示しています。
パルス列の代わりに、PCMは一連の数字または数字を生成するため、このプロセスは次のように呼ばれます。 digital。これらの数字はそれぞれ、バイナリコードですが、その瞬間の信号サンプルのおおよその振幅を表しています。
パルス符号変調では、メッセージ信号は一連の符号化パルスで表されます。このメッセージ信号は、時間と振幅の両方で離散形式で信号を表すことによって実現されます。
PCMの基本要素
パルス符号変調回路の送信機セクションは、 Sampling, Quantizing そして Encoding、アナログ-デジタル変換器セクションで実行されます。サンプリング前のローパスフィルターは、メッセージ信号のエイリアシングを防ぎます。
受信機セクションの基本的な操作は次のとおりです。 regeneration of impaired signals, decoding, そして reconstruction量子化されたパルス列の。以下は、送信機セクションと受信機セクションの両方の基本要素を表すPCMのブロック図です。
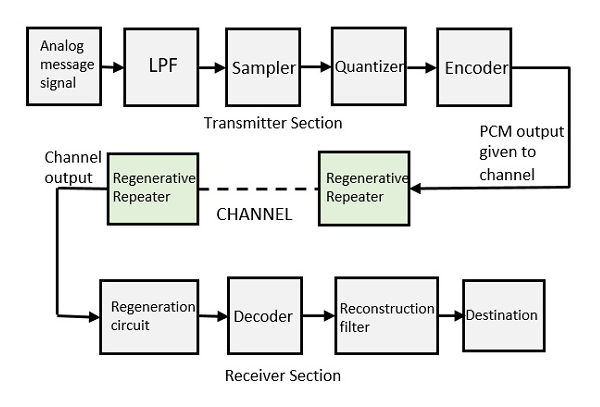
ローパスフィルタ
このフィルタは、メッセージ信号のエイリアシングを回避するために、メッセージ信号の最高周波数よりも大きい入力アナログ信号に存在する高周波成分を除去します。
サンプラー
これは、メッセージ信号の瞬時値でサンプルデータを収集し、元の信号を再構築するのに役立つ手法です。サンプリングレートは、最高周波数成分の2倍より大きくなければなりませんW サンプリング定理に従って、メッセージ信号の。
量子化器
量子化は、余分なビットを減らし、データを制限するプロセスです。サンプリングされた出力は、量子化器に渡されると、冗長ビットを減らし、値を圧縮します。
エンコーダー
アナログ信号のデジタル化はエンコーダーによって行われます。量子化された各レベルをバイナリコードで指定します。ここで行われるサンプリングは、サンプルアンドホールドプロセスです。これらの3つのセクション(LPF、サンプラー、およびクォンタイザー)は、アナログ-デジタルコンバーターとして機能します。エンコードにより、使用される帯域幅が最小限に抑えられます。
回生リピーター
このセクションは信号強度を増加させます。チャネルの出力には、信号損失を補償して信号を再構築し、その強度を高めるために、1つの回生リピーター回路もあります。
デコーダ
デコーダ回路は、パルスコード化された波形をデコードして、元の信号を再生します。この回路は復調器として機能します。
再構成フィルター
再生回路とデコーダーによってデジタルからアナログへの変換が行われた後、元の信号を取り戻すための再構成フィルターと呼ばれるローパスフィルターが使用されます。
したがって、パルス符号変調回路は、与えられたアナログ信号をデジタル化し、コード化してサンプリングし、アナログ形式で送信します。このプロセス全体を逆のパターンで繰り返して、元の信号を取得します。
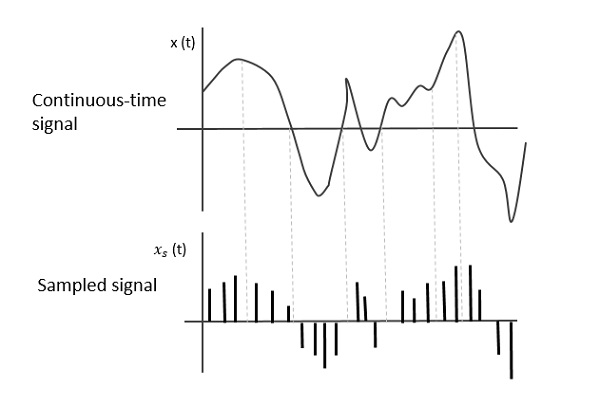
Sampling 「離散形式の連続時間信号の瞬時値を測定するプロセス」と定義されています。
Sample は、時間領域で連続しているデータ全体から取得されたデータの一部です。
ソースがアナログ信号を生成し、それをデジタル化する必要がある場合は、 1s そして 0sつまり、HighまたはLowの場合、信号は時間内に離散化する必要があります。このアナログ信号の離散化は、サンプリングと呼ばれます。
次の図は、連続時間信号を示しています x (t) およびサンプリングされた信号 xs (t)。いつx (t) 周期的なインパルス列、サンプリングされた信号が乗算されます xs (t) が得られます。
サンプリングレート
信号を離散化するには、サンプル間のギャップを修正する必要があります。そのギャップは、sampling period Ts。
$$サンプリング\:頻度= \ frac {1} {T_ {s}} = f_s $$
どこ、
$ T_s $はサンプリング時間です
$ f_s $は、サンプリング周波数またはサンプリングレートです
Sampling frequencyはサンプリング期間の逆数です。このサンプリング周波数は、単に次のように呼ぶことができますSampling rate。サンプリングレートは、1秒あたりに取得されたサンプルの数、または有限の値のセットを示します。
デジタル化された信号からアナログ信号を再構築するには、サンプリングレートを十分に考慮する必要があります。サンプリングレートは、メッセージ信号のデータが失われたり、オーバーラップしたりしないようにする必要があります。したがって、このためにナイキストレートと呼ばれるレートが固定されました。
ナイキストレート
信号が帯域制限されており、それより高い周波数成分がないとします。 Wハーツ。つまり、Wは最高周波数です。このような信号の場合、元の信号を効果的に再生するには、サンプリングレートを最高周波数の2倍にする必要があります。
つまり、
$$ f_S = 2W $$
どこ、
$ f_S $はサンプリングレートです
W 最高頻度です
このサンプリングレートは、 Nyquist rate。
このナイキストレートの理論には、サンプリング定理と呼ばれる定理が記載されています。
サンプリング定理
サンプリング定理は、 Nyquist theoremは、帯域制限されている関数のクラスの帯域幅に関して十分なサンプルレートの理論を提供します。
サンプリング定理は、次のように述べています。「信号は、そのレートでサンプリングされた場合、正確に再現できます。 fs これは最大周波数の2倍を超えています W。」
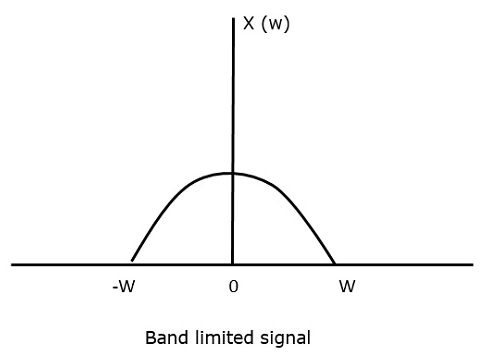
このサンプリング定理を理解するために、帯域制限された信号、つまり値が non-zero いくつかの間 –W そして W ハーツ。
このような信号は、$ x(f)= 0 \:for \:\ mid f \ mid> W $として表されます。
連続時間信号の場合 x (t)、周波数領域の帯域制限信号は、次の図に示すように表すことができます。
サンプリング周波数が必要です。これは、サンプリング後も情報が失われない周波数です。このために、サンプリング周波数が最大周波数の2倍である必要があるナイキストレートがあります。これは、サンプリングの臨界速度です。
信号の場合 x(t) がナイキストレートを超えてサンプリングされた場合、元の信号を復元できます。ナイキストレートを下回ってサンプリングされた場合、信号を復元することはできません。
次の図は、より高いレートでサンプリングされた場合の信号を説明しています。 2w 周波数領域で。
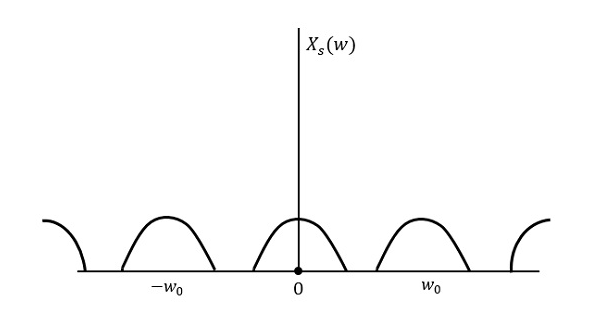
上の図は、信号のフーリエ変換を示しています xs (t)。ここでは、情報が失われることなく複製されています。混同がないため、復旧が可能です。
信号のフーリエ変換 xs (t) です
$$ X_s(w)= \ frac {1} {T_ {s}} \ sum_ {n =-\ infty} ^ \ infty X(w-nw_0)$$
ここで$ T_s $ = Sampling Period および$ w_0 = \ frac {2 \ pi} {T_s} $
サンプリングレートが最高周波数の2倍に等しい場合に何が起こるかを見てみましょう(2W)
つまり、
$$ f_s = 2W $$
どこ、
$ f_s $はサンプリング周波数です
W 最高頻度です
結果は上図のようになります。情報は失われることなく置き換えられます。したがって、これも優れたサンプリングレートです。
さて、状態を見てみましょう、
$$ f_s <2W $$
結果のパターンは次の図のようになります。

上記のパターンから、情報の重複が発生し、情報の混同や損失につながることがわかります。このオーバーラップの望ましくない現象は、エイリアシングと呼ばれます。
エイリアシング
エイリアシングは、「信号のスペクトル内の高周波成分の現象であり、サンプリングされたバージョンのスペクトル内の低周波成分のアイデンティティを引き継ぐ」と言うことができます。
エイリアシングの影響を減らすために取られた是正措置は次のとおりです。
PCMの送信機セクションでは、 low pass anti-aliasing filter サンプラーの前に、不要な高周波成分を除去するために使用されます。
フィルタリング後にサンプリングされる信号は、ナイキストレートよりわずかに高いレートでサンプリングされます。
ナイキストレートよりも高いサンプリングレートを持つというこの選択は、設計を容易にするのにも役立ちます。 reconstruction filter 受信機で。
フーリエ変換の範囲
一般に、信号の分析と定理の証明において、フーリエ級数とフーリエ変換の助けを求めることが観察されています。それは−
フーリエ変換は、非周期信号のフーリエ級数を拡張したものです。
フーリエ変換は、さまざまなドメインの信号を表示し、信号を簡単に分析するのに役立つ強力な数学ツールです。
このフーリエ変換を使用して、任意の信号を正弦と余弦の合計で分解できます。
次の章では、量子化の概念について説明しましょう。
アナログ信号のデジタル化には、アナログ値にほぼ等しい値の四捨五入が含まれます。サンプリング方法では、アナログ信号のいくつかのポイントを選択し、これらのポイントを結合して、値をほぼ安定した値に丸めます。このようなプロセスは、Quantization。
アナログ信号の量子化
アナログ-デジタルコンバータは、このタイプの機能を実行して、指定されたアナログ信号から一連のデジタル値を作成します。次の図は、アナログ信号を表しています。この信号をデジタルに変換するには、サンプリングと量子化を行う必要があります。
アナログ信号の量子化は、いくつかの量子化レベルで信号を離散化することによって行われます。 Quantization は、振幅のサンプリング値を有限のレベルセットで表します。これは、連続振幅サンプルを離散時間信号に変換することを意味します。
次の図は、アナログ信号がどのように量子化されるかを示しています。青い線はアナログ信号を表し、茶色の線は量子化された信号を表します。
サンプリングと量子化の両方により、情報が失われます。Quantizer出力の品質は、使用される量子化レベルの数によって異なります。量子化された出力の離散振幅は、次のように呼ばれます。representation levels または reconstruction levels。2つの隣接する表現レベル間の間隔は、quantum または step-size。
次の図は、特定のアナログ信号のデジタル形式である結果の量子化信号を示しています。
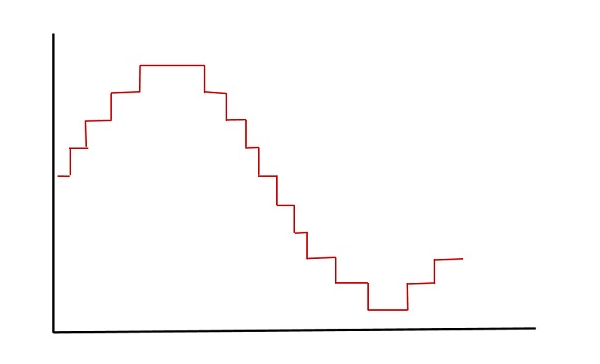
これは、 Stair-case その形状に応じた波形。
量子化の種類
量子化には、均一量子化と不均一量子化の2種類があります。
量子化レベルが等間隔に配置されている量子化のタイプは、 Uniform Quantization。量子化レベルが等しくなく、ほとんどの場合、それらの間の関係が対数である量子化のタイプは、と呼ばれます。Non-uniform Quantization。
均一量子化には2つのタイプがあります。ミッドライズタイプとミッドトレッドタイプがあります。次の図は、2種類の均一量子化を表しています。
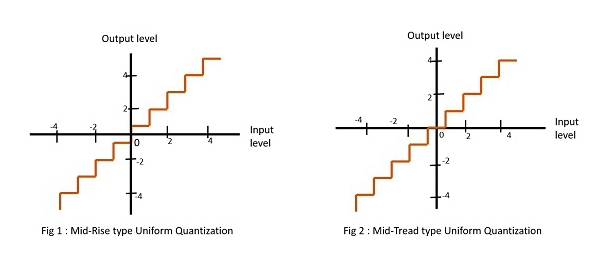
図1はミッドライズタイプ、図2はミッドトレッドタイプの均一量子化を示しています。
ザ・ Mid-Riseグラフのように階段の隆起部分の真ん中に原点があることから、このタイプと呼ばれています。このタイプの量子化レベルは偶数です。
ザ・ Mid-treadグラフのように階段の踏み板の真ん中に原点があるため、タイプと呼ばれます。このタイプの量子化レベルの数は奇数です。
中層型と中層型の均一量子化器はどちらも原点に関して対称です。
量子化エラー
どのシステムでも、その機能中は、入力と出力の値に常に違いがあります。システムの処理により、これらの値の差であるエラーが発生します。
入力値とその量子化された値の差は、 Quantization Error。AQuantizerは、量子化(値の四捨五入)を実行する対数関数です。アナログ-デジタルコンバーター(ADC)量子化器として機能します。
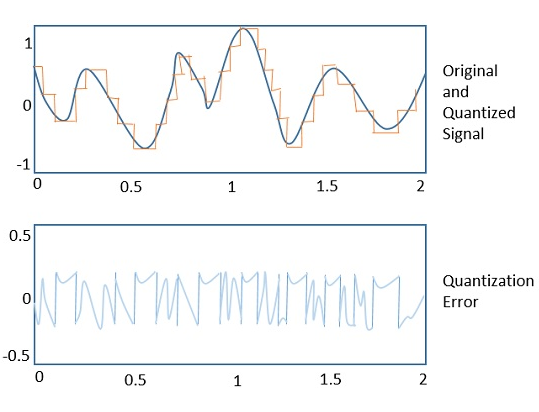
次の図は、元の信号と量子化された信号の違いを示す、量子化エラーの例を示しています。
量子化ノイズ
これは一種の量子化エラーであり、通常、アナログオーディオ信号をデジタルに量子化するときに発生します。たとえば、音楽では、信号は絶えず変化し続けますが、エラーには規則性が見られません。このようなエラーは、次のような広帯域ノイズを生成します。Quantization Noise。
PCMでの圧伸
言葉 Compandingは圧縮と拡張の組み合わせです。つまり、両方を実行します。これは、PCMで使用される非線形技術であり、送信機でデータを圧縮し、受信機で同じデータを拡張します。この手法を使用することにより、ノイズとクロストークの影響が軽減されます。
圧伸技術には2つのタイプがあります。彼らは-
A-law圧伸技術
均一な量子化はで達成されます A = 1、ここで、特性曲線は線形であり、圧縮は行われません。
A-lawは原点で中層になっています。したがって、ゼロ以外の値が含まれます。
A-law圧伸は、PCM電話システムに使用されます。
µ-law圧伸技術
均一な量子化はで達成されます µ = 0、ここで、特性曲線は線形であり、圧縮は行われません。
µ-lawは原点にミッドトレッドがあります。したがって、ゼロ値が含まれます。
µ-law圧伸は、音声および音楽信号に使用されます。
µ-lawは北米と日本で使用されています。
相関性の高いサンプルの場合、PCM手法でエンコードすると、冗長な情報が残ります。この冗長な情報を処理し、より良い出力を得るには、以前の出力から想定された予測サンプル値を取得し、それらを量子化された値で要約することが賢明な決定です。このようなプロセスは、Differential PCM (DPCM) 技術。
DPCM送信機
DPCM送信機は、2つのサマー回路を備えた量子化器と予測器で構成されています。以下は、DPCM送信機のブロック図です。
各ポイントの信号は、次のように名前が付けられます。
$ x(nT_s)$はサンプル入力です
$ \ widehat {x}(nT_s)$は予測されたサンプルです
$ e(nT_s)$は、サンプリングされた入力と予測された出力の差であり、予測エラーと呼ばれることがよくあります。
$ v(nT_s)$は量子化された出力です
$ u(nT_s)$は予測子入力であり、実際には予測子出力と量子化器出力の夏の出力です。
予測子は、送信機回路の以前の出力から想定されるサンプルを生成します。この予測子への入力は、入力信号$ x(nT_s)$の量子化バージョンです。
量子化器の出力は次のように表されます-
$$ v(nT_s)= Q [e(nT_s)] $$
$ = e(nT_s)+ q(nT_s)$
どこ q (nTs) は量子化誤差です
予測子入力は、量子化器出力と予測子出力の合計です。
$$ u(nT_s)= \ widehat {x}(nT_s)+ v(nT_s)$$
$ u(nT_s)= \ widehat {x}(nT_s)+ e(nT_s)+ q(nT_s)$
$$ u(nT_s)= x(nT_s)+ q(nT_s)$$
同じ予測回路がデコーダーで使用され、元の入力を再構築します。
DPCM受信機
DPCMレシーバーのブロック図は、デコーダー、予測子、およびサマー回路で構成されています。以下は、DPCM受信機の図です。

信号の表記は前のものと同じです。ノイズがない場合、エンコードされたレシーバー入力はエンコードされたトランスミッター出力と同じになります。
前述のように、予測子は前の出力に基づいて値を想定します。デコーダーに与えられた入力が処理され、その出力が予測子の出力と合計されて、より良い出力が得られます。
より良いサンプリングを実現するには、信号のサンプリングレートをナイキストレートよりも高くする必要があります。差分PCMでのこのサンプリング間隔が大幅に短縮された場合、サンプル間の振幅の差は、差が1-bit quantizationの場合、ステップサイズは非常に小さくなります。 Δ (デルタ)。
デルタ変調
サンプリングレートがはるかに高く、量子化後のステップサイズの値が小さい変調のタイプ Δ、そのような変調は次のように呼ばれます delta modulation。
デルタ変調の機能
以下は、デルタ変調の機能の一部です。
信号相関を最大限に活用するために、オーバーサンプリングされた入力が取得されます。
量子化の設計は単純です。
入力シーケンスは、ナイキストレートよりもはるかに高くなっています。
品質は中程度です。
変調器と復調器の設計は単純です。
出力波形の階段近似。
ステップサイズは非常に小さいです。 Δ (デルタ)。
ビットレートはユーザーが決定できます。
これには、より簡単な実装が含まれます。
デルタ変調は、DPCM技術の簡略化された形式であり、次のようにも表示されます。 1-bit DPCM scheme。サンプリング間隔が短くなると、信号の相関が高くなります。
デルタ変調器
Delta Modulatorは、1ビットの量子化器と遅延回路、および2つのサマー回路で構成されています。以下は、デルタ変調器のブロック図です。
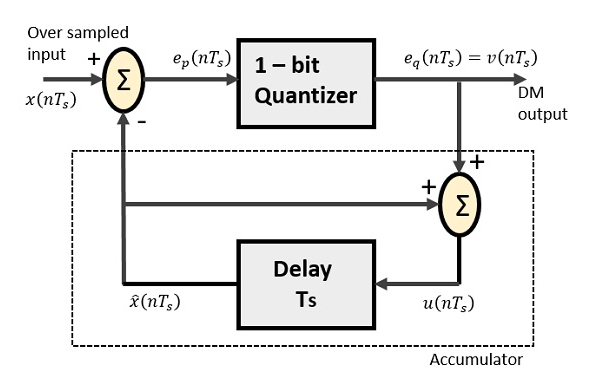
DPCMの予測回路は、DMの単純な遅延回路に置き換えられています。
上の図から、次のような表記があります。
$ x(nT_s)$ =オーバーサンプリングされた入力
$ e_p(nT_s)$ =夏の出力と量子化器の入力
$ e_q(nT_s)$ =量子化器の出力= $ v(nT_s)$
$ \ widehat {x}(nT_s)$ =遅延回路の出力
$ u(nT_s)$ =遅延回路の入力
これらの表記法を使用して、デルタ変調のプロセスを理解しようとします。
$ e_p(nT_s)= x(nT_s)-\ widehat {x}(nT_s)$
---------式1
$ = x(nT_s)-u([n-1] T_s)$
$ = x(nT_s)-[\ widehat {x} [[n-1] T_s] + v [[n-1] T_s]] $
---------式2
さらに、
$ v(nT_s)= e_q(nT_s)= S.sig。[e_p(nT_s)] $
---------式3
$ u(nT_s)= \ widehat {x}(nT_s)+ e_q(nT_s)$
どこ、
$ \ widehat {x}(nT_s)$ =遅延回路の以前の値
$ e_q(nT_s)$ =量子化器の出力= $ v(nT_s)$
したがって、
$ u(nT_s)= u([n-1] T_s)+ v(nT_s)$
---------式4
つまり、
The present input of the delay unit
= (The previous output of the delay unit) + (the present quantizer output)
蓄積の条件がゼロであると仮定すると、
$ u(nT_s)= S \ displaystyle \ sum \ limits_ {j = 1} ^ n sig [e_p(jT_s)] $
Accumulated version of DM output = $ \ displaystyle \ sum \ limits_ {j = 1} ^ nv(jT_s)$
---------式5
さて、注意してください
$ \ widehat {x}(nT_s)= u([n-1] T_s)$
$ = \ displaystyle \ sum \ limits_ {j = 1} ^ {n-1} v(jT_s)$
---------式6
ディレイユニットの出力は、1サンプル遅れたアキュムレータ出力です。
式5と6から、復調器の可能な構造が得られます。
階段近似波形は、ステップサイズをデルタとして持つデルタ変調器の出力になります(Δ)。波形の出力品質は中程度です。
デルタ復調器
デルタ復調器は、ローパスフィルタ、サマー、および遅延回路で構成されています。ここでは予測回路が削除されているため、復調器に想定される入力は与えられません。
以下は、デルタ復調器の図です。
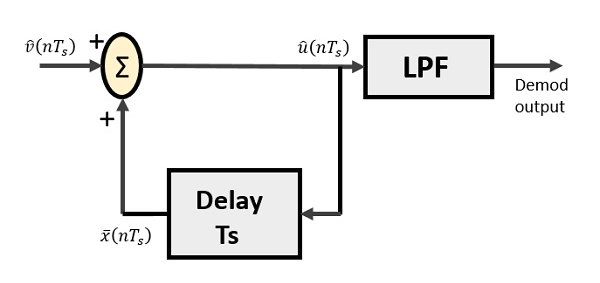
上の図から、次のような表記があります。
$ \ widehat {v}(nT_s)$は入力サンプルです
$ \ widehat {u}(nT_s)$は夏の出力です
$ \ bar {x}(nT_s)$は遅延出力です
バイナリシーケンスは、復調器への入力として与えられます。階段近似出力はLPFに与えられます。
ローパスフィルターは多くの理由で使用されますが、主な理由は帯域外信号のノイズ除去です。送信機で発生する可能性のあるステップサイズエラーは、granular noise、ここでは削除されます。ノイズが存在しない場合、変調器の出力は復調器の入力と等しくなります。
DPCMに対するDMの利点
1ビット量子化器
変調器と復調器の非常に簡単な設計
ただし、DMにはノイズがあります。
勾配過負荷歪み( Δ 小さいです)
粒状ノイズ( Δ は大きい)
アダプティブデルタ変調(ADM)
デジタル変調では、出力波の品質に影響を与えるステップサイズを決定するという特定の問題に遭遇しました。
変調信号の急勾配では大きなステップサイズが必要であり、メッセージの勾配が小さい場合は小さなステップサイズが必要です。その過程で細部が見落とされます。したがって、希望する方法でサンプリングを取得するために、要件に応じてステップサイズの調整を制御できるとよいでしょう。これがのコンセプトですAdaptive Delta Modulation。
以下は、アダプティブデルタ変調器のブロック図です。
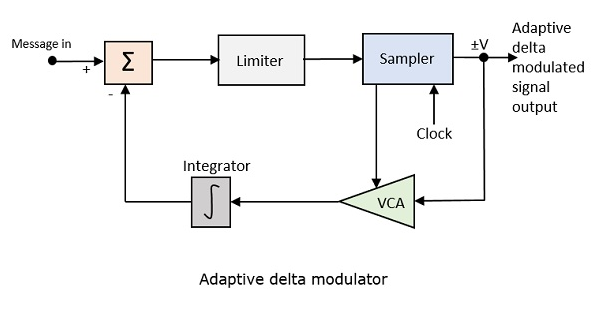
電圧制御アンプのゲインは、サンプラーからの出力信号によって調整されます。アンプのゲインがステップサイズを決定し、両方が比例します。
ADMは、現在のサンプルの値と次のサンプルの予測値の差を定量化します。可変ステップ高さを使用して次の値を予測し、急速に変化する値を忠実に再現します。
デジタル通信プロセスへの基本的な道を開いたいくつかのテクニックがあります。信号をデジタル化するために、サンプリングと量子化の手法があります。
それらを数学的に表現するために、LPCとデジタル多重化技術があります。これらのデジタル変調技術についてさらに説明します。
線形予測符号化
Linear Predictive Coding (LPC)線形予測モデルでデジタル音声信号を表すツールです。これは主に、オーディオ信号処理、音声合成、音声認識などで使用されます。
線形予測は、現在のサンプルが過去のサンプルの線形結合に基づいているという考えに基づいています。分析では、離散時間信号の値を前のサンプルの線形関数として推定します。
スペクトルエンベロープは、線形予測モデルの情報を使用して、圧縮された形式で表されます。これは数学的に次のように表すことができます-
$ s(n)= \ displaystyle \ sum \ limits_ {k = 1} ^ p \ alpha_k s(n-k)$ p そして αk
どこ
s(n) 現在の音声サンプルです
k 特定のサンプルです
p 最新の値です
αk 予測子の係数です
s(n - k) 前の音声サンプルです
LPCの場合、予測子の係数値は、実際の音声サンプルと線形に予測された音声サンプルの間の(有限間隔での)差の2乗の合計を最小化することによって決定されます。
これは非常に便利な方法です encoding speech低ビットレートで。LPCメソッドは非常に近いですFast Fourier Transform (FFT) 方法。
多重化
Multiplexingは、共有メディアを介して、複数の信号を1つの信号に結合するプロセスです。これらの信号は、本質的にアナログの場合、プロセスは次のように呼ばれます。analog multiplexing。デジタル信号が多重化されている場合、それは次のように呼ばれますdigital multiplexing。
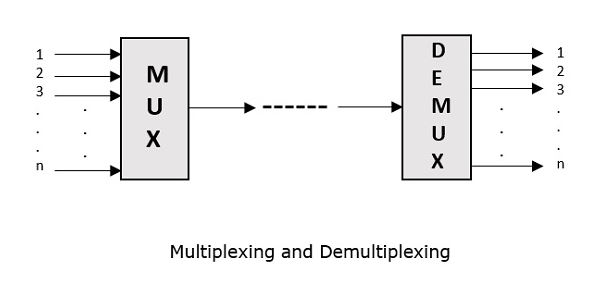
多重化は、電話で最初に開発されました。多数の信号を組み合わせて、1本のケーブルで送信しました。多重化のプロセスは、通信チャネルをいくつかの論理チャネルに分割し、転送される異なるメッセージ信号またはデータストリームにそれぞれを割り当てます。多重化を行うデバイスは、MUX。受信機で行われる逆のプロセス、すなわち、1つからチャネル数を抽出することは、次のように呼ばれます。de-multiplexing。逆多重化を行うデバイスは、DEMUX。
次の図は、MUXとDEMUXを表しています。それらの主な用途は通信の分野です。
マルチプレクサの種類
マルチプレクサには、主にアナログとデジタルの2種類があります。それらはさらにFDM、WDM、およびTDMに分けられます。次の図は、この分類の詳細を示しています。
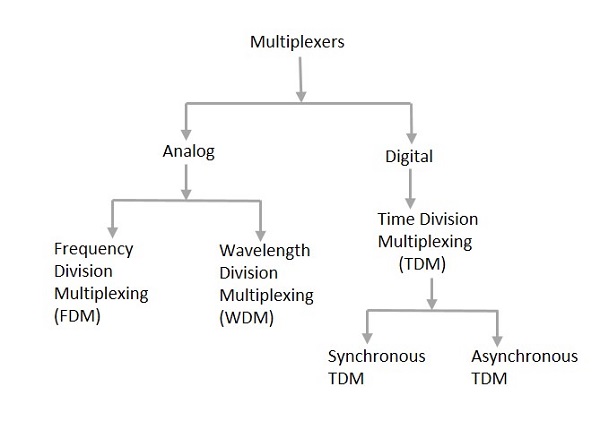
実際、多重化技術には多くの種類があります。なかでも、上図のように、一般的に分類された主なタイプがあります。
アナログ多重化
アナログ多重化技術には、本質的にアナログである信号が含まれます。アナログ信号は、周波数(FDM)または波長(WDM)に従って多重化されます。
周波数分割多重(FDM)
アナログ多重化で最も使用される手法は Frequency Division Multiplexing (FDM)。この手法では、さまざまな周波数を使用してデータストリームを結合し、通信メディアで単一の信号として送信します。
Example − 1本のケーブルで多数のチャンネルを送信する従来のテレビ送信機は、FDMを使用します。
波長分割多重(WDM)
波長分割多重はアナログ技術であり、異なる波長の多くのデータストリームが光スペクトルで送信されます。波長が長くなると、信号の周波数は低くなります。Aprism 異なる波長を1本の線に変えることができ、MUXの出力とDEMUXの入力で使用できます。
Example −光ファイバー通信は、WDM技術を使用して、通信用に異なる波長を単一の光にマージします。
デジタル多重化
デジタルという用語は、情報の離散ビットを表します。したがって、利用可能なデータは、離散的なフレームまたはパケットの形式になります。
時分割多重(TDM)
TDMでは、時間枠はスロットに分割されます。この手法は、メッセージごとに1つのスロットを割り当てることにより、単一の通信チャネルを介して信号を送信するために使用されます。
すべてのタイプのTDMのうち、主なものは同期TDMと非同期TDMです。
同期TDM
同期TDMでは、入力はフレームに接続されます。ある場合 'n'接続数、その後フレームは'に分割されますn' タイムスロット。入力ラインごとに1つのスロットが割り当てられます。
この手法では、サンプリングレートはすべての信号に共通であるため、同じクロック入力が与えられます。MUXは、常に同じスロットを各デバイスに割り当てます。
非同期TDM
非同期TDMでは、サンプリングレートは信号ごとに異なり、共通のクロックは必要ありません。割り当てられたデバイスがタイムスロットに対して何も送信せず、アイドル状態になっている場合、同期とは異なり、そのスロットは別のデバイスに割り当てられます。このタイプのTDMは、非同期転送モードネットワークで使用されます。
回生リピーター
通信システムの信頼性を高めるには、信号を損失なく効果的に送受信する必要があります。PCM波は、チャネルを介して送信された後、チャネルによって導入されたノイズのために歪められます。
元のパルスと受信したパルスを比較した回生パルスは、次の図のようになります。

信号のより良い再生のために、 regenerative repeaterレシーバーの前のパスで使用されます。これは、発生した損失から信号を復元するのに役立ちます。以下は図式表現です。
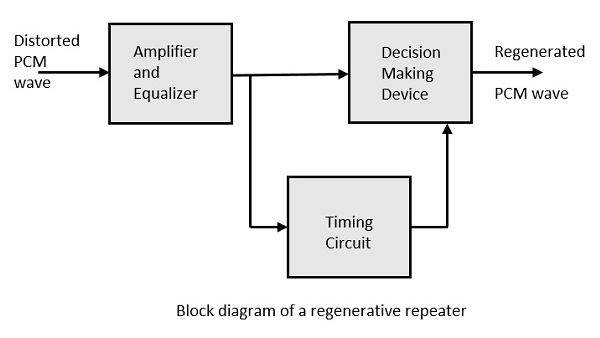
これは、アンプ、タイミング回路、および意思決定デバイスとともにイコライザーで構成されています。各コンポーネントの動作の詳細は次のとおりです。
イコライザ
チャネルは、信号に振幅と位相の歪みを生成します。これは、チャネルの伝送特性によるものです。イコライザー回路は、受信したパルスを整形することによってこれらの損失を補償します。
タイミング回路
高品質の出力を得るには、信号対雑音比(SNR)が最大になる場所でパルスのサンプリングを行う必要があります。この完全なサンプリングを実現するには、受信したパルスから周期的なパルス列を導出する必要があります。これは、タイミング回路によって行われます。
したがって、タイミング回路は、受信したパルスを介して、高いSNRでサンプリングするためのタイミング間隔を割り当てます。
決定装置
タイミング回路がサンプリング時間を決定します。決定デバイスは、これらのサンプリング時間で有効になります。決定デバイスは、量子化されたパルスとノイズの振幅が事前に決定された値を超えるかどうかに基づいて出力を決定します。
これらは、デジタル通信で使用される技術のいくつかです。データエンコーディング技術と呼ばれる、学ぶべき他の重要な技術があります。ラインコードを見た後、次の章でそれらについて学びましょう。
A line code伝送線路を介したデジタル信号のデータ伝送に使用されるコードです。このコーディングプロセスは、符号間干渉などの信号のオーバーラップや歪みを回避するように選択されています。
ラインコーディングの特性
以下はラインコーディングの特性です-
1つの信号でより多くのビットを送信するようにコーディングが行われるため、使用される帯域幅は大幅に削減されます。
特定の帯域幅に対して、電力が効率的に使用されます。
エラーの可能性は大幅に減少します。
エラー検出が行われ、バイポーラにも訂正機能があります。
電力密度は非常に良好です。
タイミングの内容は適切です。
の長い文字列 1s そして 0s 透明性を維持するために避けられます。
ラインコーディングの種類
ラインコーディングには3つのタイプがあります
- Unipolar
- Polar
- Bi-polar
ユニポーラシグナリング
ユニポーラシグナリングは、 On-Off Keying または単に OOK。
パルスの存在は、 1 脈拍がないことは 0。
ユニポーラシグナリングには2つのバリエーションがあります-
- Non Return to Zero(NRZ)
- Return to Zero(RZ)
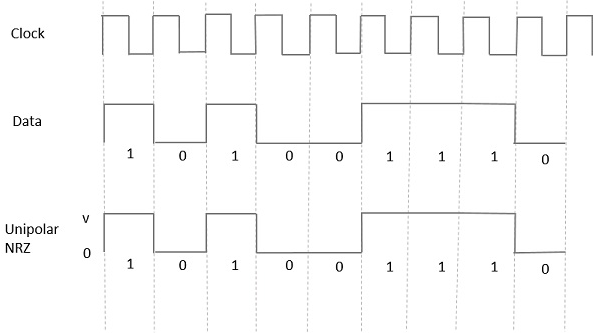
ユニポーラ非ゼロ復帰(NRZ)
このタイプのユニポーラシグナリングでは、Highinデータは次のように呼ばれる正のパルスで表されます。 Mark、期間があります T0シンボルビット期間に等しい。Lowのデータ入力にはパルスがありません。
次の図はこれを明確に示しています。
Advantages
ユニポーラNRZの利点は次のとおりです。
- それは単純だ。
- より少ない帯域幅が必要です。
Disadvantages
ユニポーラNRZの欠点は次のとおりです。
エラー訂正は行われません。
低周波成分の存在は、信号の垂下を引き起こす可能性があります。
時計がありません。
同期が失われる可能性があります(特に、 1s そして 0s)。
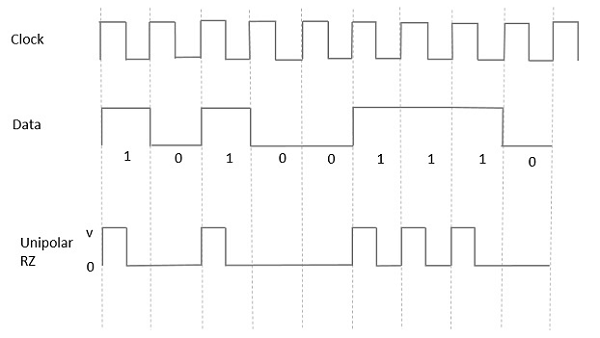
Unipolar Return to Zero(RZ)
このタイプのユニポーラシグナリングでは、データが多いですが、 Mark pulse、その期間 T0シンボルビット期間よりも短いです。ビット持続時間の半分はハイのままですが、すぐにゼロに戻り、ビット持続時間の残りの半分の間にパルスがないことを示します。
次の図の助けを借りて、それは明確に理解されます。
Advantages
ユニポーラRZの利点は次のとおりです。
- それは単純だ。
- シンボルレートで存在するスペクトル線は、クロックとして使用できます。
Disadvantages
ユニポーラRZの欠点は次のとおりです。
- エラー訂正はありません。
- ユニポーラNRZの2倍の帯域幅を占有します。
- 信号の垂下は、0Hzで信号がゼロ以外の場所で発生します。
極信号
PolarSignalingには2つの方法があります。彼らは-
- Polar NRZ
- Polar RZ
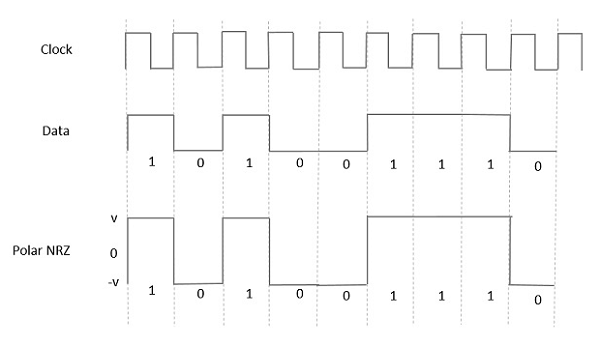
Polar NRZ
このタイプの極性シグナリングでは、データの高値は正のパルスで表され、データの低値は負のパルスで表されます。次の図はこれをよく表しています。
Advantages
PolarNRZの利点は次のとおりです。
- それは単純だ。
- 低周波成分は存在しません。
Disadvantages
PolarNRZの欠点は次のとおりです。
エラー訂正はありません。
時計がありません。
信号の垂下は、信号がゼロ以外の場所で発生します。 0 Hz。
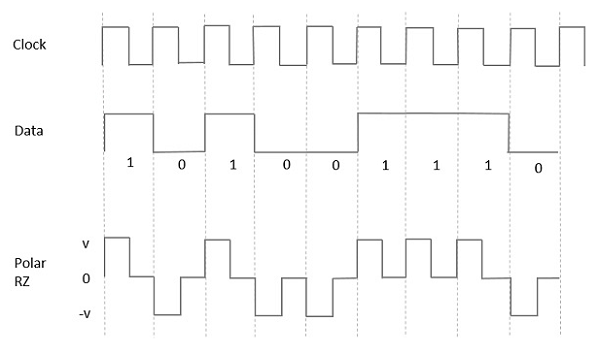
Polar RZ
このタイプの極信号では、データが多いが、 Mark pulse、その期間 T0シンボルビット期間よりも短いです。ビット持続時間の半分はハイのままですが、すぐにゼロに戻り、ビット持続時間の残りの半分の間にパルスがないことを示します。
ただし、Low入力の場合、負のパルスはデータを表し、ゼロレベルはビット期間の残りの半分の間同じままです。次の図は、これを明確に示しています。
Advantages
PolarRZの利点は次のとおりです。
- それは単純だ。
- 低周波成分は存在しません。
Disadvantages
PolarRZの欠点は次のとおりです。
エラー訂正はありません。
時計がありません。
PolarNRZの2倍の帯域幅を占有します。
信号の垂下は、信号がゼロ以外の場所で発生します。 0 Hz。
バイポーラシグナリング
これは、3つの電圧レベルを持つエンコード技術です。 +, - そして 0。このような信号は、duo-binary signal。
このタイプの例は Alternate Mark Inversion (AMI)。のために1、電圧レベルは+から–または–から+に遷移し、交互になります 1s極性が同じであること。A0 電圧レベルはゼロになります。
この方法でも2種類あります。
- バイポーラNRZ
- バイポーラRZ
これまでに説明したモデルから、NRZとRZの違いを学びました。ここでも同じようになります。次の図はこれを明確に示しています。
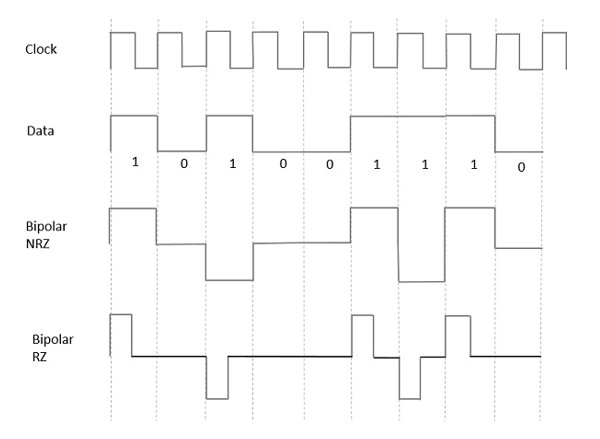
上の図には、バイポーラNRZ波形とRZ波形の両方があります。パルス持続時間とシンボルビット持続時間はNRZタイプでは等しく、パルス持続時間はRZタイプのシンボルビット持続時間の半分です。
利点
以下は利点です-
それは単純だ。
低周波成分は存在しません。
ユニポーラおよびポーラーNRZスキームよりも低い帯域幅を占有します。
ここでは信号の垂下が発生しないため、この手法はAC結合回線を介した伝送に適しています。
これには、単一のエラー検出機能があります。
短所
以下は不利な点です-
- 時計がありません。
- データの文字列が長いと、同期が失われます。
パワースペクトル密度
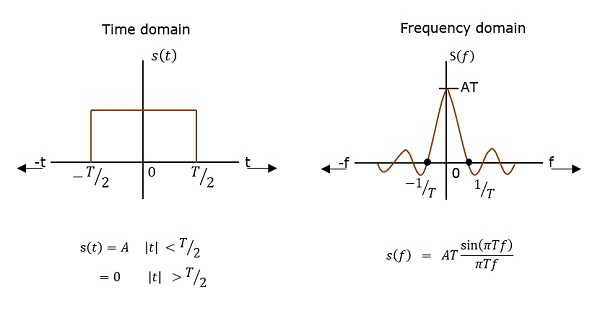
信号のパワーが周波数領域でさまざまな周波数にどのように分布するかを説明する関数は、次のように呼ばれます。 Power Spectral Density (PSD)。
PSDは、自己相関のフーリエ変換です(観測値間の類似性)。それは矩形パルスの形をしています。
PSDの派生
Einstein-Wiener-Khintchineの定理によれば、ランダムプロセスの自己相関関数またはパワースペクトル密度がわかっている場合、もう一方は正確に見つけることができます。
したがって、パワースペクトル密度を導出するには、以下に示すように、パワー信号$ x(t)$の時間自己相関$(R_x(\ tau))$を使用します。
$ R_x(\ tau)= \ lim_ {T_p \ rightarrow \ infty} \ frac {1} {T_p} \ int _ {\ frac {{-T_p}} {2}} ^ {\ frac {T_p} {2}} x(t)x(t + \ tau)dt $
$ x(t)$はインパルスで構成されているため、$ R_x(\ tau)$は次のように記述できます。
$ R_x(\ tau)= \ frac {1} {T} \ displaystyle \ sum \ limits_ {n =-\ infty} ^ \ infty R_n \ delta(\ tau --nT)$
ここで、$ R_n = \ lim_ {N \ rightarrow \ infty} \ frac {1} {N} \ sum_ka_ka_ {k + n} $
実際の信号の場合、$ R_n = R _ {-n} $であることを知ると、次のようになります。
$ S_x(w)= \ frac {1} {T}(R_0 + 2 \ displaystyle \ sum \ limits_ {n = 1} ^ \ infty R_n \ cos nwT)$
パルスフィルターのスペクトルは$(w)\ leftrightarrow f(t)$なので、次のようになります。
$ s_y(w)= \ mid F(w)\ mid ^ 2S_x(w)$
$ = \ frac {\ mid F(w)\ mid ^ 2} {T}(\ displaystyle \ sum \ limits_ {n =-\ infty} ^ \ infty R_ne ^ {-jnwT_ {b}})$
$ = \ frac {\ mid F(w)\ mid ^ 2} {T}(R_0 + 2 \ displaystyle \ sum \ limits_ {n = 1} ^ \ infty R_n \ cos nwT)$
したがって、パワースペクトル密度の式が得られます。これを使用して、さまざまなラインコードのPSDを見つけることができます。
Encoding は、データまたは特定の文字、記号、アルファベットなどのシーケンスを、データを安全に送信するために指定された形式に変換するプロセスです。 Decoding は、変換された形式から情報を抽出するエンコードの逆のプロセスです。
データエンコーディング
エンコーディングは、電圧または電流レベルのさまざまなパターンを使用して表現するプロセスです。 1s そして 0s 伝送リンク上のデジタル信号の。
ラインエンコーディングの一般的なタイプは、ユニポーラ、ポーラー、バイポーラ、およびマンチェスターです。
エンコーディング技術
データエンコーディング技術は、データ変換のタイプに応じて、次のタイプに分類されます。
Analog data to Analog signals −アナログ信号の振幅変調、周波数変調、位相変調などの変調技術は、このカテゴリに分類されます。
Analog data to Digital signals−このプロセスは、パルス符号変調(PCM)によって行われるデジタル化と呼ぶことができます。したがって、それはデジタル変調に他なりません。すでに説明したように、サンプリングと量子化はこれにおける重要な要素です。デルタ変調は、PCMよりも優れた出力を提供します。
Digital data to Analog signals−振幅偏移変調(ASK)、周波数偏移変調(FSK)、位相偏移変調(PSK)などの変調技術は、このカテゴリに分類されます。これらについては、以降の章で説明します。
Digital data to Digital signals−これらはこのセクションにあります。デジタルデータをデジタル信号にマッピングする方法はいくつかあります。それらのいくつかは-
Non Return to Zero(NRZ)
NRZコードには 1 高電圧レベルおよび 0低電圧レベル用。NRZコードの主な動作は、ビット間隔の間、電圧レベルが一定に保たれることです。前のビットの値と現在のビットの値が同じである場合、ビットの終了または開始は示されず、同じ電圧状態を維持します。
次の図は、NRZコーディングの概念を説明しています。
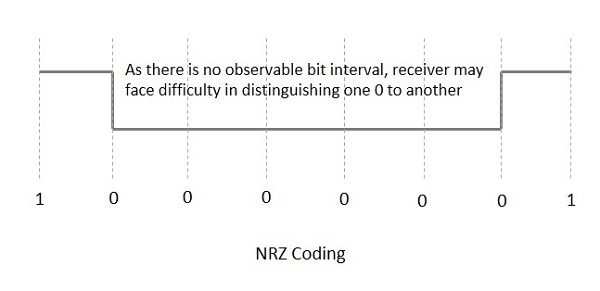
上記の例を考えると、定電圧レベルのシーケンスが長く、ビット間隔がないためにクロック同期が失われる可能性があるため、レシーバーが0と1を区別することが困難になります。
NRZには2つのバリエーションがあります。
NRZ-L(NRZ –レベル)
信号の極性は、入力信号が1から0または0から1に変化した場合にのみ変化します。これは、NRZと同じですが、入力信号の最初のビットの極性が変化する必要があります。
NRZ-I(NRZ –反転)
もし 1着信信号で発生し、ビット間隔の開始時に遷移が発生します。のために0 着信信号では、ビット間隔の開始時に遷移はありません。
NRZコードには disadvantage 次の文字列がある場合、送信機クロックと受信機クロックの同期が完全に乱されること 1s そして 0s。したがって、別のクロックラインを提供する必要があります。
二相エンコーディング
信号レベルは、最初と途中の両方で、ビット時間ごとに2回チェックされます。したがって、クロックレートはデータ転送レートの2倍になり、変調レートも2倍になります。クロックは信号自体から取得されます。このコーディングに必要な帯域幅はより広いです。
バイフェーズエンコーディングには2つのタイプがあります。
- 二相マンチェスター
- ディファレンシャルマンチェスター
二相マンチェスター
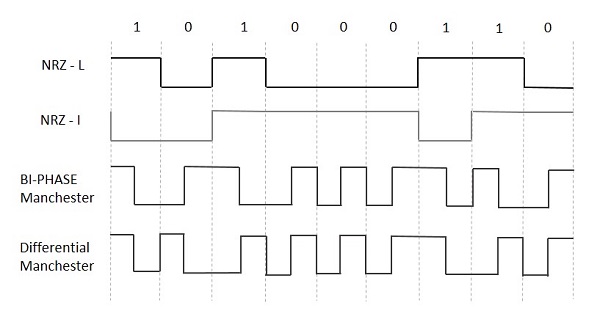
このタイプのコーディングでは、遷移はビット間隔の途中で行われます。結果として生じるパルスの遷移は、入力ビット1の場合、間隔の途中でHighからLowになります。一方、入力ビットの遷移はLowからHighになります。0。
ディファレンシャルマンチェスター
このタイプのコーディングでは、ビット間隔の途中で常に遷移が発生します。ビット間隔の開始時に遷移が発生した場合、入力ビットは次のようになります。0。ビット間隔の開始時に遷移が発生しない場合、入力ビットは次のようになります。1。
次の図は、さまざまなデジタル入力のNRZ-L、NRZ-I、バイフェーズマンチェスターおよび差動マンチェスターコーディングの波形を示しています。
ブロック符号化
ブロック符号化の種類の中で、有名なものは4B / 5B符号化と8B / 6T符号化です。ビット数は、これらのプロセスの両方で、さまざまな方法で処理されます。
4B / 5Bエンコーディング
マンチェスター符号化では、データを送信するには、NRZ符号化ではなく2倍の速度のクロックが必要です。ここでは、名前が示すように、4ビットのコードが5ビットでマップされ、最小数は1 グループ内のビット。
NRZ-Iエンコーディングのクロック同期の問題は、4つの連続するビットの各ブロックの代わりに5ビットの同等のワードを割り当てることによって回避されます。これらの5ビットワードは辞書で事前に決定されています。
5ビットコードを選択する基本的な考え方は、 one leading 0 そしてそれは持っているべきです no more than two trailing 0s。したがって、これらのワードは、ビットのブロックごとに2つのトランザクションが発生するように選択されます。
8B / 6Tエンコーディング
2つの電圧レベルを使用して、1つの信号で1つのビットを送信しました。ただし、3つを超える電圧レベルを使用すると、信号ごとにより多くのビットを送信できます。
たとえば、6つの電圧レベルを使用して単一信号の8ビットを表す場合、そのようなエンコーディングは8B / 6Tエンコーディングと呼ばれます。したがって、この方法では、信号の組み合わせは729(3 ^ 6)、ビットの組み合わせは256(2 ^ 8)になります。
これらは、データの信頼性の高い送信のためにデジタルデータを圧縮またはコーディングすることによってデジタルデータをデジタル信号に変換するために主に使用される手法です。
さまざまな種類のコーディング手法を経て、データがどのように歪みやすいか、信頼できる通信を確立するためにデータが影響を受けないようにするための対策を講じる方法について考えました。
発生する可能性が最も高い別の重要な歪みがあります。 Inter-Symbol Interference (ISI)。
符号間干渉
これは信号の歪みの一形態であり、1つまたは複数のシンボルが後続の信号に干渉し、ノイズを発生させたり、出力を低下させたりします。
ISIの原因
ISIの主な原因は次のとおりです。
- マルチパス伝搬
- チャネルの非線形周波数
ISIは不要であり、クリーンな出力を得るには完全に排除する必要があります。ISIの影響を軽減するために、ISIの原因も解決する必要があります。
レシーバー出力に存在する数学的形式でISIを表示するために、レシーバー出力を検討できます。
受信フィルター出力$ y(t)$は、時間$ t_i = iT_b $でサンプリングされます( i 整数値を取る)、生成-
$ y(t_i)= \ mu \ displaystyle \ sum \ limits_ {k =-\ infty} ^ {\ infty} a_kp(iT_b --kT_b)$
$ = \ mu a_i + \ mu \ displaystyle \ sum \ limits_ {k =-\ infty \\ k \ neq?i} ^ {\ infty} a_kp(iT_b --kT_b)$
上記の式では、最初の項$ \ mu a_i $は次の式で生成されます。 ith 送信ビット。
第2項は、他のすべての送信ビットのデコードに対する残留効果を表します。 ithビット。この残留効果は、Inter Symbol Interference。
ISIがない場合、出力は次のようになります。
$$ y(t_i)= \ mu a_i $$
この方程式は、 ith送信されたビットが正しく再現されます。ただし、ISIが存在すると、出力にビットエラーと歪みが発生します。
送信機または受信機を設計するときは、ISIの影響を最小限に抑えて、エラー率を最小限に抑えて出力を受信することが重要です。
相関コーディング
これまで、ISIは望ましくない現象であり、信号を劣化させることについて説明してきました。ただし、同じISIを制御された方法で使用すると、次のビットレートを実現できます。2W 帯域幅のチャネルのビット/秒 Wハーツ。このようなスキームは、Correlative Coding または Partial response signaling schemes。
ISIの量がわかっているので、信号に対するISIの影響を回避するために、要件に応じて受信機を設計するのは簡単です。相関コーディングの基本的な考え方は、次の例を検討することによって実現されます。Duo-binary Signaling。
デュオバイナリシグナリング
duo-binaryという名前は、バイナリシステムの伝送機能を2倍にすることを意味します。これを理解するために、バイナリ入力シーケンスについて考えてみましょう。{ak} それぞれが期間を持つ無相関の2進数で構成されます Ta秒。これで、信号1 で表されます +1 ボルトと記号 0 によって -1 ボルト。
したがって、デュオバイナリコーダー出力 ck 現在の2進数の合計として与えられます ak および前の値 ak-1 次の式に示すように。
$$ c_k = a_k + a_ {k-1} $$
上記の式は、無相関のバイナリシーケンスの入力シーケンスを示しています {ak} 相関する3レベルパルスのシーケンスに変更されます {ck}。パルス間のこの相関関係は、人工的な方法で送信信号にISIを導入することとして理解できます。
アイパターン
ISIの効果を研究する効果的な方法は Eye Pattern。アイパターンという名前は、バイナリ波の人間の目に似ていることから付けられました。アイパターンの内部領域は、eye opening。次の図は、アイパターンのイメージを示しています。
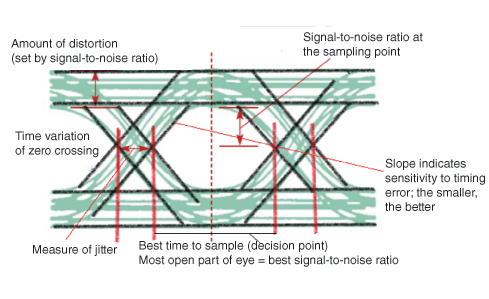
Jitter は、デジタル信号の瞬間の理想的な位置からの短期間の変動であり、データエラーにつながる可能性があります。
ISIの効果が高まると、ISIが非常に高い場合、アイ開口部の上部から下部へのトレースが増加し、アイが完全に閉じます。
アイパターンは、特定のシステムに関する次の情報を提供します。
実際のアイパターンは、ビットエラーレートと信号対雑音比を推定するために使用されます。
アイ開口部の幅は、ISIからエラーなしで受信波をサンプリングできる時間間隔を定義します。
目の開口部が広い瞬間が、サンプリングに適した時間になります。
サンプリング時間に応じた目の閉鎖率は、システムがタイミングエラーにどれだけ敏感であるかを決定します。
指定されたサンプリング時間でのアイ開口部の高さは、ノイズに対するマージンを定義します。
したがって、アイパターンの解釈は重要な考慮事項です。
イコライゼーション
信頼できるコミュニケーションを確立するには、高品質の出力が必要です。チャネルの伝送損失および信号の品質に影響を与えるその他の要因を処理する必要があります。私たちが議論したように、最も発生する損失はISIです。
信号をISIから解放し、最大の信号対雑音比を確保するには、次のメソッドを実装する必要があります。 Equalization。次の図は、通信システムの受信側部分のイコライザーを示しています。
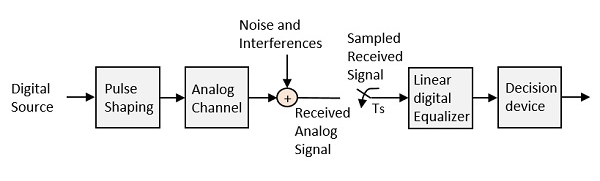
図に示されているノイズや干渉は、送信中に発生する可能性があります。再生リピーターにはイコライザー回路があり、回路を整形することで伝送損失を補償します。イコライザーは実装可能です。
エラー確率と性能指数
データを通信できる速度は、 data rate。データの送信中にビットでエラーが発生する速度は、Bit Error Rate (BER)。
BERの発生確率は Error Probability。信号対雑音比(SNR)が増加すると、BERが減少するため、エラー確率も減少します。
アナログ受信機では、 figure of merit検出プロセスでは、入力SNRに対する出力SNRの比率と呼ぶことができます。性能指数の値が大きいほど有利になります。
デジタルからアナログへの信号は、この章で説明する次の変換です。これらの手法は、Digital Modulation techniques。
Digital Modulationより多くの情報容量、高いデータセキュリティ、より迅速なシステム可用性、高品質の通信を提供します。したがって、デジタル変調技術には、アナログ変調技術よりも大量のデータを伝送する能力に対する大きな需要があります。
必要に応じて、多くの種類のデジタル変調技術とそれらの組み合わせがあります。それらすべての中で、私たちは著名なものについて議論します。
ASK –振幅偏移変調
結果として得られる出力の振幅は、キャリア周波数に応じて、ゼロレベルにするか、正と負の変動にするかによって入力データに依存します。
FSK –周波数シフトキーイング
出力信号の周波数は、適用される入力データに応じて、高または低になります。
PSK –位相偏移変調
出力信号の位相は、入力に応じてシフトします。これらは主に、位相偏移変調の数に応じて、バイナリ位相偏移変調(BPSK)と直交位相偏移変調(QPSK)の2つのタイプがあります。もう1つは、前の値に従って位相を変更する差動位相偏移変調(DPSK)です。
M-aryエンコーディング
M-aryエンコーディング技術は、2ビット以上を1つの信号で同時に送信する方法です。これは、帯域幅の削減に役立ちます。
M-aryテクニックのタイプは次のとおりです。
- M-ary ASK
- M-ary FSK
- M-ary PSK
これらはすべて、後続の章で説明します。
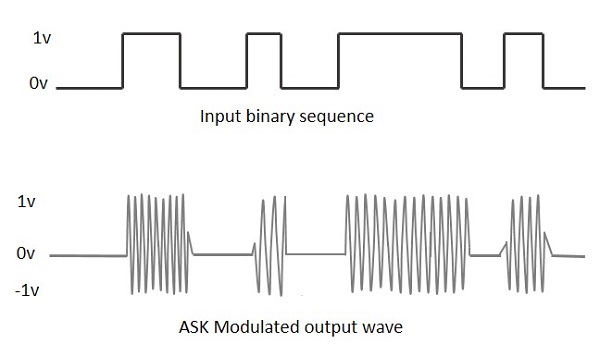
Amplitude Shift Keying (ASK) は、信号の振幅の変動の形でバイナリデータを表す振幅変調の一種です。
変調された信号には高周波キャリアがあります。ASK変調されたときのバイナリ信号は、zero の値 Low それが与える間入力 carrier output にとって High 入力。
次の図は、ASK変調波形とその入力を表しています。
このASK変調波を取得するプロセスを見つけるために、ASK変調器の動作について学習しましょう。
ASK変調器
ASK変調器のブロック図は、キャリア信号発生器、メッセージ信号からのバイナリシーケンス、および帯域制限フィルタで構成されています。以下は、ASK変調器のブロック図です。
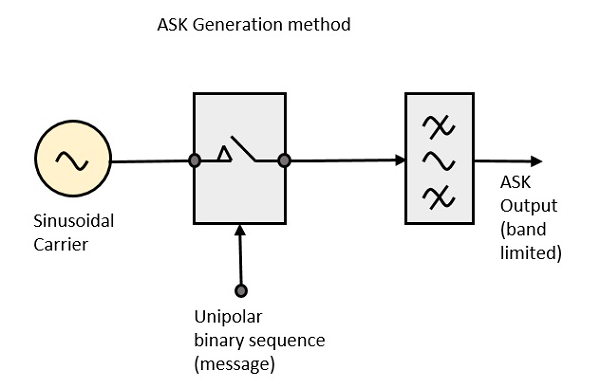
キャリアジェネレータは、連続高周波キャリアを送信します。メッセージ信号からのバイナリシーケンスにより、ユニポーラ入力がHighまたはLowになります。ハイ信号はスイッチを閉じ、搬送波を許可します。したがって、出力は高入力でのキャリア信号になります。入力が低い場合、スイッチが開き、電圧が表示されなくなります。したがって、出力は低くなります。
帯域制限フィルターは、帯域制限フィルターまたはパルス整形フィルターの振幅および位相特性に応じてパルスを整形します。
ASK復調器
ASK復調技術には2つのタイプがあります。彼らは-
- 非同期ASK復調/検出
- 同期ASK復調/検出
送信機のクロック周波数が受信機のクロック周波数と一致する場合、それはとして知られています Synchronous method、周波数が同期するにつれて。そうでなければ、それはとして知られていますAsynchronous。
非同期ASK復調器
非同期ASK検出器は、半波整流器、ローパスフィルタ、およびコンパレータで構成されています。以下は、同じもののブロック図です。
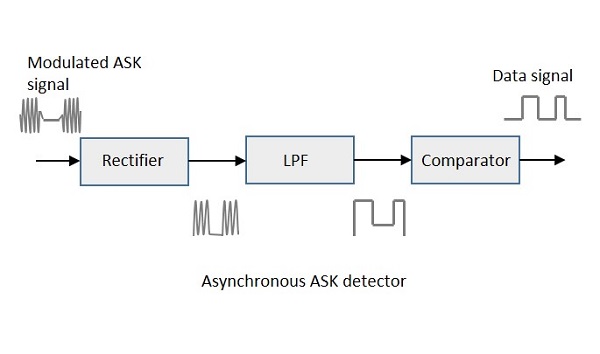
変調されたASK信号は、正の半出力を提供する半波整流器に与えられます。ローパスフィルターは、より高い周波数を抑制し、コンパレータがデジタル出力を提供するエンベロープ検出出力を提供します。
同期ASK復調器
同期ASK検出器は、二乗則検出器、ローパスフィルタ、コンパレータ、および電圧リミッタで構成されています。以下は、同じもののブロック図です。
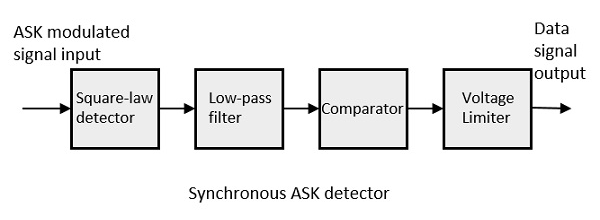
ASK変調された入力信号は二乗則検出器に与えられます。二乗則検出器は、出力電圧が振幅変調された入力電圧の二乗に比例するものです。ローパスフィルターは、より高い周波数を最小化します。コンパレータと電圧リミッターは、クリーンなデジタル出力を得るのに役立ちます。
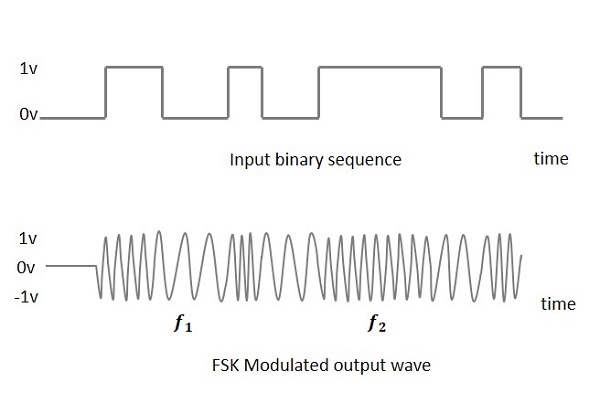
Frequency Shift Keying (FSK)は、デジタル信号の変化に応じて搬送波信号の周波数を変化させるデジタル変調技術です。FSKは周波数変調方式です。
FSK変調波の出力は、バイナリHigh入力の場合は周波数が高く、バイナリLow入力の場合は周波数が低くなります。バイナリ1s そして 0s マークおよびスペース周波数と呼ばれます。
次の画像は、FSK変調波形とその入力を図で表したものです。
このFSK変調波を取得するプロセスを見つけるには、FSK変調器の動作についてお知らせください。
FSK変調器
FSK変調器のブロック図は、クロックと入力バイナリシーケンスを備えた2つの発振器で構成されています。以下はそのブロック図です。
より高い周波数とより低い周波数の信号を生成する2つの発振器は、内部クロックとともにスイッチに接続されています。メッセージの送信中の出力波形の突然の位相の不連続性を回避するために、内部で両方の発振器にクロックが適用されます。バイナリ入力シーケンスは、バイナリ入力に従って周波数を選択するように送信機に適用されます。
FSK復調器
FSK波を復調する方法はいくつかあります。FSK検出の主な方法は次のとおりです。asynchronous detector そして synchronous detector。同期検波器はコヒーレント検波器ですが、非同期検波器は非コヒーレント検波器です。
非同期FSK検出器
非同期FSK検出器のブロック図は、2つのバンドパスフィルター、2つの包絡線検波器、および決定回路で構成されています。以下は図式表現です。
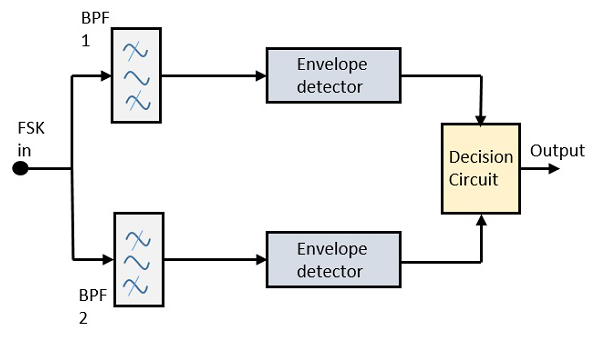
FSK信号は、2つのバンドパスフィルター(BPF)を通過し、次のように調整されます。 Space そして Mark周波数。これら2つのBPFからの出力は、包絡線検波器に与えられるASK信号のように見えます。各包絡線検波器の信号は非同期に変調されます。
決定回路は、どの出力がより可能性が高いかを選択し、包絡線検波器のいずれかからそれを選択します。また、波形を長方形に再形成します。
同期FSK検出器
同期FSK検出器のブロック図は、局部発振器回路を備えた2つのミキサー、2つのバンドパスフィルター、および決定回路で構成されています。以下は図式表現です。
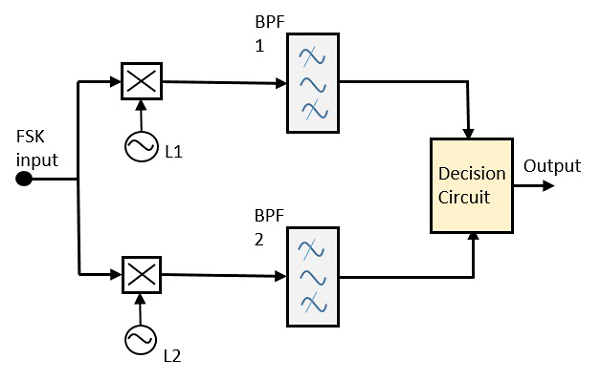
FSK信号入力は、局部発振器回路を備えた2つのミキサーに与えられます。これら2つは2つのバンドパスフィルターに接続されています。これらの組み合わせは復調器として機能し、決定回路はどの出力がより可能性が高いかを選択し、検出器のいずれかからそれを選択します。2つの信号の周波数分離は最小です。
両方の復調器の場合、それぞれの帯域幅はビットレートに依存します。この同期復調器は、非同期型復調器よりも少し複雑です。
Phase Shift Keying (PSK)は、特定の時間にサイン入力とコサイン入力を変化させることによってキャリア信号の位相を変更するデジタル変調技術です。PSK技術は、RFIDおよびBluetooth通信に加えて、無線LAN、生体認証、非接触操作に広く使用されています。
PSKには、信号がシフトする位相に応じて2つのタイプがあります。彼らは-
バイナリ位相偏移変調(BPSK)
これは、2相PSKまたは位相反転キーイングとも呼ばれます。この手法では、正弦波キャリアは0°と180°などの2つの位相反転を取ります。
BPSKは基本的に、メッセージがデジタル情報であるための両面帯域抑制キャリア(DSBSC)変調方式です。
直交位相偏移変調(QPSK)
これは位相偏移変調技術であり、正弦波キャリアは0°、90°、180°、270°などの4つの位相反転を行います。
この種の手法をさらに拡張すると、要件に応じて、PSKを8または16の値で実行できます。
BPSK変調器
バイナリ位相シフトキーイングのブロック図は、一方の入力としてキャリア正弦波を持ち、もう一方の入力としてバイナリシーケンスを持つバランス変調器で構成されています。以下は図式表現です。
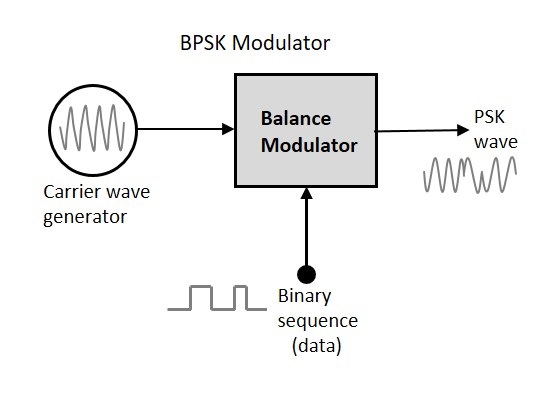
BPSKの変調は、入力に印加された2つの信号を乗算するバランス変調器を使用して行われます。ゼロバイナリ入力の場合、位相は次のようになります。0° 高入力の場合、位相反転は次のようになります。 180°。
以下は、BPSK変調出力波とその与えられた入力の図式表現です。
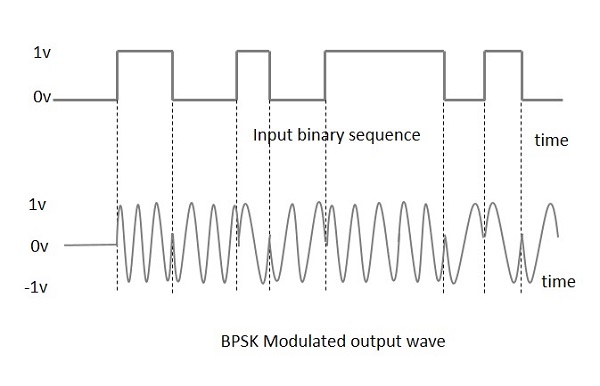
変調器の出力正弦波は、データ信号の関数である直接入力キャリアまたは反転(180°位相シフト)入力キャリアになります。
BPSK復調器
BPSK復調器のブロック図は、局部発振器回路を備えたミキサー、バンドパスフィルター、2入力検出器回路で構成されています。回路図は以下の通りです。
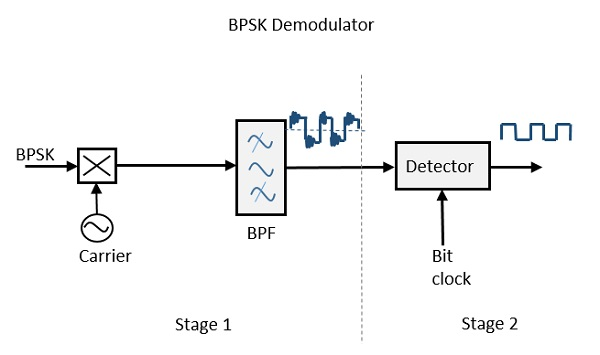
ミキサー回路とバンドパスフィルターの助けを借りて、帯域制限されたメッセージ信号を回復することにより、復調の最初の段階が完了します。帯域制限されたベースバンド信号が取得され、この信号はバイナリメッセージビットストリームを再生成するために使用されます。
復調の次の段階では、元のバイナリメッセージ信号を生成するために、検出器回路でビットクロックレートが必要になります。ビットレートが搬送周波数の約数である場合、ビットクロックの再生成が簡略化されます。回路は、容易に理解するために、意思決定回路は2で挿入することができる目の検出の段階。
ザ・ Quadrature Phase Shift Keying (QPSK) はBPSKのバリエーションであり、両面帯域抑制キャリア(DSBSC)変調方式でもあり、次のように呼ばれる、一度に2ビットのデジタル情報を送信します。 bigits。
デジタルビットを一連のデジタルストリームに変換する代わりに、ビットペアに変換します。これにより、データビットレートが半分になり、他のユーザーが使用できるようになります。
QPSK変調器
QPSK変調器は、ビットスプリッター、局部発振器を備えた2つの乗算器、2ビットのシリアルからパラレルへのコンバーター、およびサマー回路を使用します。以下は、同じもののブロック図です。

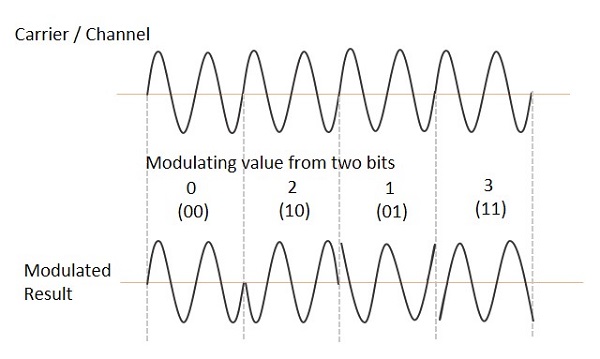
変調器の入力では、メッセージ信号の偶数ビット(つまり、2番目のビット、4番目のビット、6番目のビットなど)と奇数ビット(つまり、1番目のビット、3番目のビット、5番目のビットなど)が分離されます。ビットスプリッターによって、同じキャリアと乗算されて奇数のBPSKを生成します(PSKI)そしてBPSK(と呼ばれる PSKQ)。ザ・PSKQ 信号は変調される前にとにかく90°位相シフトされます。
2ビット入力のQPSK波形は次のとおりで、バイナリ入力のさまざまなインスタンスの変調結果を示しています。
QPSK復調器
QPSK復調器は、局部発振器を備えた2つの製品復調回路、2つのバンドパスフィルター、2つの積分回路、および2ビットの並列-シリアルコンバーターを使用します。以下は同じものの図です。
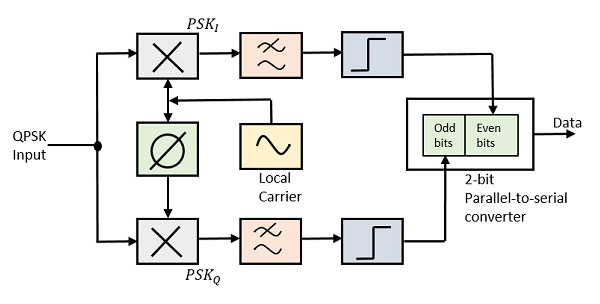
復調器の入力にある2つのプロダクト検波器は、2つのBPSK信号を同時に復調します。ここでは、ビットのペアが元のデータから復元されます。これらの信号は処理後、パラレル-シリアルコンバータに渡されます。
に Differential Phase Shift Keying (DPSK)変調された信号の位相は、前の信号要素に対してシフトされます。ここでは、基準信号は考慮されていません。信号位相は、前の要素のハイ状態またはロー状態に従います。このDPSK技術は、基準発振器を必要としません。
次の図は、DPSKのモデル波形を表しています。
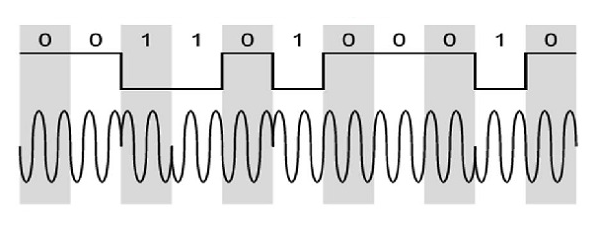
上の図から、データビットがLow、つまり0の場合、信号の位相は反転せず、そのまま継続していることがわかります。データがHigh、つまり1の場合、NRZIの場合と同様に、信号の位相が反転し、1(差動符号化の形式)で反転します。
上記の波形を観察すると、High状態は M 変調信号で、Low状態は W 変調信号で。
DPSK変調器
DPSKはBPSKの手法であり、基準位相信号はありません。ここでは、送信信号自体を基準信号として使用することができます。以下は、DPSK変調器の図です。
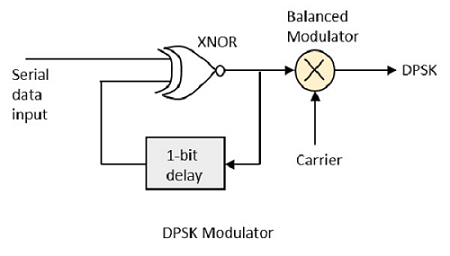
DPSKは、2つの異なる信号、つまり、それぞれ180°の位相シフトを持つキャリア信号と変調信号をエンコードします。シリアルデータ入力はXNORゲートに与えられ、出力は1ビットの遅延を介して他の入力に再びフィードバックされます。XNORゲートの出力は、キャリア信号とともにバランス変調器に渡され、DPSK変調信号を生成します。
DPSK復調器
DPSK復調器では、反転ビットの位相が前のビットの位相と比較されます。以下は、DPSK復調器のブロック図です。

上の図から、バランス変調器には1ビットの遅延入力とともにDPSK信号が与えられていることがわかります。その信号は、LPFの助けを借りてより低い周波数に制限されます。次に、コンパレータまたはシュミットトリガー回路であるシェーパー回路に渡され、元のバイナリデータが出力として復元されます。
バイナリという言葉は2ビットを表します。 M 与えられた数のバイナリ変数に対して可能な条件、レベル、または組み合わせの数に対応する数字を表します。
これは、データ送信に使用されるデジタル変調技術の一種であり、1ビットではなく、2ビット以上が一度に送信されます。単一の信号が複数ビットの送信に使用されるため、チャネル帯域幅が減少します。
M-ary方程式
デジタル信号が電圧レベル、周波数、位相、振幅などの4つの条件下で与えられる場合、 M = 4。
与えられた数の条件を生成するために必要なビット数は、数学的に次のように表されます。
$$ N = \ log_ {2} {M} $$
どこ
N 必要なビット数です
M で可能な条件、レベル、または組み合わせの数です N ビット。
上記の式は、次のように再配置できます。
$$ 2 ^ N = M $$
たとえば、2ビットの場合、 22 = 4 条件が可能です。
M-aryテクニックの種類
一般に、マルチレベル(M-ary)変調技術は、3つ以上の変調レベルを持つデジタル入力が送信機の入力で許可されるため、デジタル通信で使用されます。したがって、これらの手法は帯域幅効率が高くなります。
多くのM-ary変調技術があります。これらの手法のいくつかは、振幅、位相、周波数など、搬送波信号の1つのパラメータを変調します。
M-ary ASK
これは、M-ary Amplitude Shift Keying(M-ASK)またはM-ary Pulse Amplitude Modulation(PAM)と呼ばれます。
ザ・ amplitude キャリア信号の M さまざまなレベル。
M-aryASKの表現
$ S_m(t)= A_mcos(2 \ pi f_ct)\ quad A_m \ epsilon {(2m --1- M)\ Delta、m = 1,2 ... \ :. M} \ quadおよび\ quad 0 \ leq t \ leq T_s $
M-aryASKのいくつかの顕著な特徴は次のとおりです。
- この方法は、PAMでも使用されます。
- その実装は簡単です。
- M-ary ASKは、ノイズや歪みの影響を受けやすくなっています。
M-ary FSK
これは、M-ary周波数シフトキーイング(M-ary FSK)と呼ばれます。
ザ・ frequency キャリア信号の M さまざまなレベル。
M-aryFSKの表現
$ S_i(t)= \ sqrt {\ frac {2E_s} {T_s}} \ cos \ left(\ frac {\ pi} {T_s} \ left(n_c + i \ right)t \ right)$ $ 0 \ leq t \ leq T_s \ quadおよび\ quad i = 1,2,3 ... \:.. M $
ここで、$ f_c = \ frac {n_c} {2T_s} $は、ある固定整数nに対してです。
M-aryFSKのいくつかの顕著な特徴は次のとおりです。
ASKほどノイズの影響を受けません。
送信された M 信号の数は、エネルギーと持続時間が同じです。
信号は$ \ frac {1} {2T_s} $ Hzで分離され、信号が互いに直交します。
以来 M 信号は直交しており、信号空間に混雑はありません。
M-ary FSKの帯域幅効率は低下し、電力効率は M。
M-ary PSK
これは、M-ary位相偏移変調(M-ary PSK)と呼ばれます。
ザ・ phase キャリア信号の M さまざまなレベル。
M-aryPSKの表現
$ S_i(t)= \ sqrt {\ frac {2E} {T}} \ cos \ left(w_o t + \ phi _it \ right)$ $ 0 \ leq t \ leq T \ quadおよび\ quad i = 1,2 ... M $
$$ \ phi _i \ left(t \ right)= \ frac {2 \ pi i} {M} \ quadここで、\ quad i = 1,2,3 ... \:... M $$
M-aryPSKのいくつかの顕著な特徴は次のとおりです。
エンベロープは一定であり、より多くの位相の可能性があります。
この方法は、宇宙通信の初期に使用されました。
ASKやFSKよりも優れたパフォーマンス。
受信機での最小の位相推定誤差。
M-ary PSKの帯域幅効率は低下し、電力効率は M。
これまで、さまざまな変調技術について説明してきました。これらすべての手法の出力は、次のように表されるバイナリシーケンスです。1s そして 0s。このバイナリまたはデジタル情報には多くの種類と形式があり、それらについてさらに説明します。
情報は、アナログであろうとデジタルであろうと、通信システムのソースです。 Information theory は、情報の定量化、保存、および通信とともに、情報のコーディングを研究するための数学的アプローチです。
イベントの発生条件
イベントを考えると、3つの発生条件があります。
イベントが発生していない場合は、次の条件があります。 uncertainty。
イベントが発生したばかりの場合、次の条件があります surprise。
イベントが発生した場合、過去に、いくつかの条件があります information。
これらの3つのイベントは異なる時間に発生します。これらの条件の違いは、イベントの発生確率に関する知識を得るのに役立ちます。
エントロピ
イベントの発生の可能性、それがどれほど驚くべきか不確実であるかを観察するとき、それは私たちがイベントのソースからの情報の平均的な内容についての考えを持っていることを試みていることを意味します。
Entropy ソースシンボルごとの平均情報量の尺度として定義できます。 Claude Shannon、「情報理論の父」は、その公式を次のように提供しました。
$$ H =-\ sum_ {i} p_i \ log_ {b} p_i $$
どこ pi 文字番号の出現確率です i 与えられた文字の流れから b使用されるアルゴリズムのベースです。したがって、これは次のようにも呼ばれますShannon’s Entropy。
チャネル出力を観察した後、チャネル入力について残っている不確かさの量は、次のように呼ばれます。 Conditional Entropy。$ H(x \ mid y)$で表されます
相互情報量
出力がであるチャネルを考えてみましょう Y 入力は X
以前の不確実性のエントロピーを X = H(x)
(これは、入力が適用される前に想定されます)
出力の不確実性について知るために、入力が適用された後、条件付きエントロピーを考えてみましょう。 Y = yk
$$ H \ left(x \ mid y_k \ right)= \ sum_ {j = 0} ^ {j-1} p \ left(x_j \ mid y_k \ right)\ log_ {2} \ left [\ frac {1 } {p(x_j \ mid y_k)} \ right] $$
これは$ H(X \ mid y = y_0)の確率変数です\:... \:... \:... \:... \:... \:H(X \ mid y = y_k)$確率$ p(y_0)\:... \:... \:... \:... \:p(y_ {k-1)} $それぞれ。
出力アルファベットの$ H(X \ mid y = y_k)$の平均値 y は−
$ H \ left(X \ mid Y \ right)= \ displaystyle \ sum \ limits_ {k = 0} ^ {k-1} H \ left(X \ mid y = y_k \ right)p \ left(y_k \ right )$
$ = \ displaystyle \ sum \ Limits_ {k = 0} ^ {k-1} \ displaystyle \ sum \ limits_ {j = 0} ^ {j-1} p \ left(x_j \ mid y_k \ right)p \ left (y_k \ right)\ log_ {2} \ left [\ frac {1} {p \ left(x_j \ mid y_k \ right)} \ right] $
$ = \ displaystyle \ sum \ Limits_ {k = 0} ^ {k-1} \ displaystyle \ sum \ limits_ {j = 0} ^ {j-1} p \ left(x_j、y_k \ right)\ log_ {2 } \ left [\ frac {1} {p \ left(x_j \ mid y_k \ right)} \ right] $
ここで、(入力を適用する前と後の)両方の不確実性条件を考慮すると、差、つまり$ H(x)-H(x \ mid y)$は、解決されるチャネル入力に関する不確実性を表す必要があることがわかります。チャネル出力を観察することによって。
これは、 Mutual Information チャネルの。
相互情報量を$ I(x; y)$と表すと、次のようにすべてを方程式で書くことができます。
$$ I(x; y)= H(x)-H(x \ mid y)$$
したがって、これは相互情報量の等式表現です。
相互情報量のプロパティ
これらは相互情報量の特性です。
チャネルの相互情報量は対称的です。
$$ I(x; y)= I(y; x)$$
相互情報量は非負です。
$$ I(x; y)\ geq 0 $$
相互情報量は、チャネル出力のエントロピーで表すことができます。
$$ I(x; y)= H(y)-H(y \ mid x)$$
ここで、$ H(y \ mid x)$は条件付きエントロピーです
チャネルの相互情報量は、チャネル入力とチャネル出力の結合エントロピーに関連しています。
$$ I(x; y)= H(x)+ H(y)-H(x、y)$$
ここで、結合エントロピー$ H(x、y)$は次のように定義されます。
$$ H(x、y)= \ displaystyle \ sum \ limits_ {j = 0} ^ {j-1} \ displaystyle \ sum \ limits_ {k = 0} ^ {k-1} p(x_j、y_k)\ log_ {2} \ left(\ frac {1} {p \ left(x_i、y_k \ right)} \ right)$$
チャネル容量
これまで、相互情報量について説明してきました。個別のメモリレスチャネルによって送信されたときのシグナリング間隔の瞬間における最大平均相互情報量は、データの最大の信頼できる送信速度の確率として理解することができます。channel capacity。
それはによって示されます C で測定されます bits per channel 使用する。
ディスクリートメモリレスソース
以前の値とは無関係に、データが連続した間隔で放出されているソースは、次のように呼ぶことができます。 discrete memoryless source。
このソースは、連続した時間間隔ではなく、離散的な時間間隔で考慮されるため、離散的です。このソースは、以前の値を考慮せずに、各時点で新鮮であるため、メモリがありません。
ディスクリートメモリレスソースによって生成されたコードは、効率的に表現する必要があります。これは、通信における重要な問題です。これを実現するために、これらのソースコードを表すコードワードがあります。
たとえば、電信では、アルファベットがで示されるモールス信号を使用します Marks そして Spaces。手紙の場合E 主に使用されると見なされ、それはによって示されます “.” 手紙が Q めったに使用されない、で示されます “--.-”
ブロック図を見てみましょう。
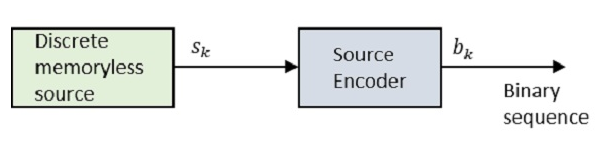
どこ Sk ディスクリートメモリレスソースの出力であり、 bk は、で表されるソースエンコーダの出力です。 0s そして 1s。
エンコードされたシーケンスは、受信機で便利にデコードされるようなものです。
ソースにアルファベットが含まれていると仮定しましょう k 異なるシンボルとその kth シンボル Sk 確率で発生します Pk、 どこ k = 0, 1…k-1。
バイナリコードワードをシンボルに割り当てましょう Sk、長さのあるエンコーダによる lk、ビット単位で測定。
したがって、ソースエンコーダの平均コードワード長Lを次のように定義します。
$$ \ overline {L} = \ displaystyle \ sum \ limits_ {k = 0} ^ {k-1} p_kl_k $$
L ソースシンボルあたりの平均ビット数を表します
$ L_ {min} = \:最小\:可能\:値\:の\:\ overline {L} $の場合
次に coding efficiency 次のように定義できます
$$ \ eta = \ frac {L {min}} {\ overline {L}} $$
$ \ overline {L} \ geq L_ {min} $を使用すると、$ \ eta \ leq 1 $になります。
ただし、$ \ eta = 1 $の場合、ソースエンコーダは効率的であると見なされます。
このためには、値$ L_ {min} $を決定する必要があります。
定義を参照してみましょう。「離散的なメモリレスのエントロピーソース$ H(\ delta)$が与えられた場合、平均コードワード長L すべてのソースエンコーディングは、$ \ overline {L} \ geq H(\ delta)$として制限されます。」
簡単に言うと、コードワード(例:QUEUEという単語のモールス信号は-.- ..- ..-。)は、常にソースコード(例ではQUEUE)以上です。つまり、コードワードの記号は、ソースコードのアルファベット以上です。
したがって、$ L_ {min} = H(\ delta)$の場合、エントロピー$ H(\ delta)$に関するソースエンコーダの効率は次のように記述できます。
$$ \ eta = \ frac {H(\ delta)} {\ overline {L}} $$
このソースコーディング定理は、 noiseless coding theoremエラーのないエンコーディングを確立するためです。とも呼ばれますShannon’s first theorem。
チャネルに存在するノイズは、デジタル通信システムの入力シーケンスと出力シーケンスの間に不要なエラーを作成します。エラー確率は非常に低くなければなりません、nearly ≤ 10-6 信頼できるコミュニケーションのために。
通信システムのチャネルコーディングは、システムの信頼性を向上させるために、制御による冗長性を導入します。ソースコーディングは冗長性を減らしてシステムの効率を改善します。
チャネルコーディングは、アクションの2つの部分で構成されます。
Mapping チャネル入力シーケンスへの着信データシーケンス。
Inverse Mapping チャネル出力シーケンスを出力データシーケンスに変換します。
最終的な目標は、 channel noise 最小化する必要があります。
マッピングはエンコーダーの助けを借りて送信機によって行われますが、逆マッピングは受信機のデコーダーによって行われます。
チャネルコーディング
離散メモリレスチャネルを考えてみましょう (δ) エントロピーあり H (δ)
Ts δが1秒あたりに与える記号を示します
チャネル容量はで示されます C
チャネルはすべてに使用できます Tc 秒
したがって、チャネルの最大機能は次のとおりです。 C/Tc
送信されたデータ= $ \ frac {H(\ delta)} {T_s} $
$ \ frac {H(\ delta)} {T_s} \ leq \ frac {C} {T_c} $の場合、送信は良好であり、わずかなエラー確率で再現できることを意味します。
この場合、$ \ frac {C} {T_c} $はチャネル容量の臨界レートです。
$ \ frac {H(\ delta)} {T_s} = \ frac {C} {T_c} $の場合、システムはクリティカルレートでシグナリングしていると言われます。
逆に、$ \ frac {H(\ delta)} {T_s}> \ frac {C} {T_c} $の場合、送信はできません。
したがって、送信の最大速度は、ディスクリートメモリレスチャネル上で発生する可能性のある信頼性の高いエラーのないメッセージの場合、チャネル容量の臨界速度に等しくなります。これはChannel coding theorem。
信号の主な問題はノイズまたはエラーであり、通信システムの信頼性を損ないます。 Error control codingエラーの発生を制御するために行われるコーディング手順です。これらの手法は、エラー検出とエラー訂正に役立ちます。
それらに適用される数学的原理に応じて、多くの異なるエラー訂正コードがあります。しかし、歴史的に、これらのコードは次のように分類されてきましたLinear block codes そして Convolution codes。
線形ブロックコード
線形ブロックコードでは、パリティビットとメッセージビットの組み合わせは線形です。つまり、結果のコードワードは任意の2つのコードワードの線形結合になります。
を含むデータのいくつかのブロックを考えてみましょう k各ブロックのビット。これらのビットは、n各ブロックのビット。ここにn より大きい k。送信機は冗長ビットを追加します。(n-k)ビット。比率k/n それは code rate。それはによって示されますr との値 r です r < 1。
ザ・ (n-k) ここに追加されたビットは parity bits。パリティビットは、エラー検出とエラー訂正、およびデータの検索に役立ちます。送信されるデータでは、コードワードの左端のビットがメッセージビットに対応し、コードワードの右端のビットがパリティビットに対応します。
体系的なコード
線形ブロックコードは、変更されるまで体系的なコードにすることができます。したがって、変更されていないブロックコードは、systematic code。
以下はの表現です structure of code word、割り当てに応じて。

メッセージが変更されていない場合、それは体系的なコードと呼ばれます。つまり、データの暗号化によってデータが変更されてはなりません。
畳み込みコード
これまでのところ、線形コードでは、体系的な変更されていないコードが好ましいと説明してきました。ここでは、合計のデータn 送信された場合のビット、 k ビットはメッセージビットであり、 (n-k) ビットはパリティビットです。
エンコードの過程で、データ全体からパリティビットが差し引かれ、メッセージビットがエンコードされます。ここで、パリティビットが再び追加され、データ全体が再びエンコードされます。
次の図は、情報の送信に使用されるデータのブロックとデータのストリームの例を引用しています。
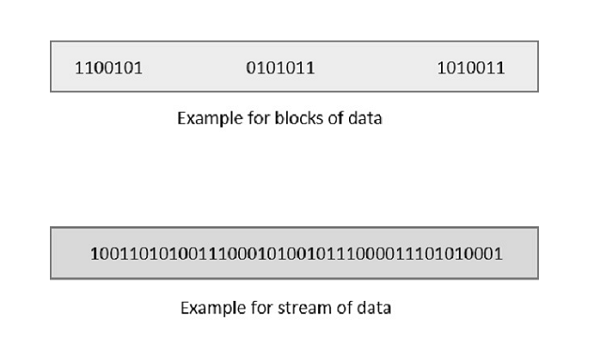
上記のプロセス全体は面倒であり、欠点があります。システムがビジー状態の場合、ここではバッファの割り当てが主な問題になります。
この欠点は、畳み込み符号で解消されます。データのストリーム全体にシンボルが割り当てられてから送信されます。データはビットストリームであるため、ストレージ用のバッファは必要ありません。
ハミングコード
コードワードの線形性は、2つのコードワードの合計もコードワードであるということです。ハミングコードは次のタイプですlinear error correcting 最大2ビットのエラーを検出できるコード、または未修正のエラーを検出せずに1ビットのエラーを修正できるコード。
ハミングコードを使用している間、追加のパリティビットはシングルビットエラーを識別するために使用されます。1ビットパターンから別のビットパターンに移行するには、データのいくつかのビットを変更する必要があります。このようなビット数は、次のように呼ぶことができます。Hamming distance。パリティの距離が2の場合、1ビットの反転を検出できます。しかし、これは修正できません。また、2ビットの反転は検出できません。
ただし、ハミングコードは、エラーの検出と訂正において前述の手順よりも優れた手順です。
BCHコード
BCHコードは発明者にちなんで名付けられています Bose、 Cハウダリと Hocquenghem。BCHコードの設計時には、修正するシンボルの数を制御できるため、複数ビットの修正が可能です。BCHコードは、エラー訂正コードの強力な手法です。
正の整数の場合 m ≥ 3 そして t < 2m-1BCHバイナリコードが存在します。以下は、そのようなコードのパラメーターです。
ブロック長 n = 2m-1
パリティチェックディジットの数 n - k ≤ mt
最小距離 dmin ≥ 2t + 1
このコードは次のように呼び出すことができます t-error-correcting BCH code。
巡回符号
コードワードの循環特性は、コードワードの循環シフトもコードワードであるということです。巡回コードは、この巡回特性に従います。
線形コードの場合 C、すべてのコードワード、すなわち、 C = (C1, C2, ...... Cn)Cからはコンポーネントの周期的な右シフトがあり、コードワードになります。この右シフトはに等しいn-1周期的な左シフト。したがって、どのシフトでも不変です。したがって、線形コードC、どのシフトでも不変であるため、次のように呼び出すことができます。 Cyclic code。
巡回符号はエラー訂正に使用されます。これらは主に、ダブルエラーとバーストエラーを修正するために使用されます。
したがって、これらは受信機で検出されるいくつかのエラー訂正コードです。これらのコードは、エラーが発生するのを防ぎ、通信を妨害します。また、不要な受信機が信号を盗聴するのを防ぎます。これを実現するためのシグナリング手法のクラスがあり、次の章で説明します。
信号を送信する前に、集合的なクラスの信号技術を使用して、安全な通信を提供します。 Spread Spectrum Modulation。スペクトラム拡散通信技術の主な利点は、それが意図的であろうと非意図的であろうと、「干渉」を防ぐことです。
これらの技術で変調された信号は干渉しにくく、妨害されません。公式アクセス権のない侵入者がそれらをクラックすることは決して許されません。したがって、これらの技術は軍事目的で使用されます。これらのスペクトラム拡散信号は、低電力密度で送信され、信号の広がりが広くなります。
疑似ノイズシーケンス
のコード化されたシーケンス 1s そして 0s と呼ばれる特定の自己相関プロパティを持つ Pseudo-Noise coding sequenceスペクトラム拡散技術で使用されます。これは、巡回符号の一種である最大長のシーケンスです。
狭帯域およびスペクトラム拡散信号
次の図に示すように、狭帯域信号とスペクトラム拡散信号はどちらも、周波数スペクトルを観察することで簡単に理解できます。
狭帯域信号
狭帯域信号は、次の周波数スペクトル図に示すように、信号強度が集中しています。
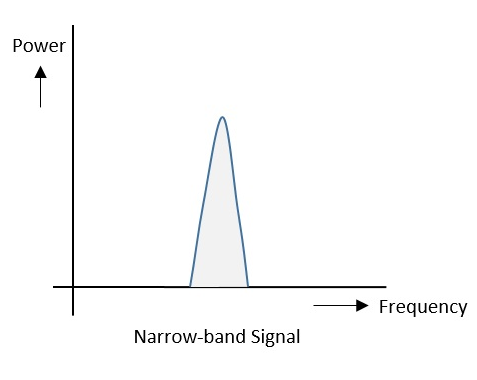
以下はその機能の一部です-
- 信号の帯域は狭い範囲の周波数を占めます。
- 電力密度が高い。
- エネルギーの広がりは低く、集中しています。
機能は良好ですが、これらの信号は干渉を受けやすいです。
スペクトラム拡散信号
スペクトラム拡散信号は、次の周波数スペクトル図に示すように、信号強度が分布しています。
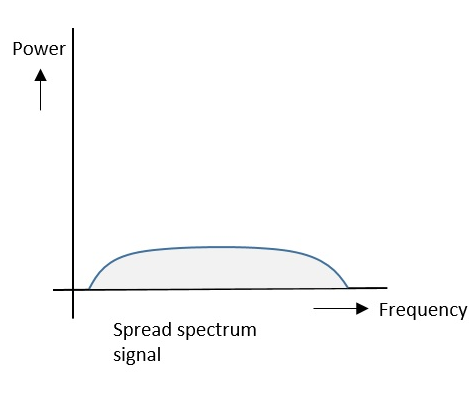
以下はその機能の一部です-
- 信号の帯域は広範囲の周波数を占めます。
- 電力密度は非常に低いです。
- エネルギーは広く行き渡っています。
これらの機能により、スペクトラム拡散信号は干渉や妨害に対して非常に耐性があります。複数のユーザーが互いに干渉することなく同じスペクトラム拡散帯域幅を共有できるため、これらは次のように呼び出すことができます。multiple access techniques。
FHSSおよびDSSS / CDMA
スペクトラム拡散多元接続技術は、必要な最小RF帯域幅よりも大きい送信帯域幅を持つ信号を使用します。
これらには2つのタイプがあります。
- 周波数ホップスペクトラム拡散(FHSS)
- 直接シーケンススペクトラム拡散(DSSS)
周波数ホップスペクトラム拡散(FHSS)
これは周波数ホッピング技術であり、ユーザーは指定された時間間隔で使用頻度を次から次へと変更する必要があります。 frequency hopping。たとえば、特定の期間、送信者1に周波数が割り当てられました。ここで、しばらくすると、送信者1は他の周波数にホップし、送信者2は、送信者1が以前に使用した最初の周波数を使用します。frequency reuse。
安全な送信を提供するために、データの周波数は相互にホップされます。各周波数ホップに費やされた時間は、Dwell time。
直接シーケンススペクトラム拡散(DSSS)
ユーザーがこのDSSS技術を使用してデータを送信する場合は常に、ユーザーデータのすべてのビットに次のように呼ばれる秘密のコードが乗算されます。 chipping code。このチッピングコードは、元のメッセージと乗算されて送信される拡散コードに他なりません。受信者は同じコードを使用して元のメッセージを取得します。
FHSSとDSSS / CDMAの比較
両方のスペクトラム拡散技術は、その特性で人気があります。明確に理解するために、それらの比較を見てみましょう。
| FHSS | DSSS / CDMA |
|---|---|
| 複数の周波数が使用されます | 単一周波数が使用されます |
| いつでもユーザーの頻度を見つけるのは難しい | 割り当てられたユーザーの頻度は常に同じです |
| 周波数の再利用が許可されます | 周波数の再利用は許可されていません |
| 送信者は待つ必要はありません | スペクトルがビジーの場合、送信者は待機する必要があります |
| 信号の電力強度が高い | 信号の電力強度が低い |
| より強く、障害物を貫通します | FHSSに比べて弱いです |
| 干渉の影響を受けることはありません | 干渉の影響を受ける可能性があります |
| もっと安い | 高いです |
| これは一般的に使用される手法です | この手法はあまり使用されません |
スペクトラム拡散の利点
スペクトラム拡散の利点は次のとおりです-
- クロストークの排除
- データの整合性を備えたより良い出力
- マルチパスフェージングの影響の低減
- より良いセキュリティ
- 騒音の低減
- 他のシステムとの共存
- より長い作動距離
- 検出が難しい
- 復調/デコードするのは簡単ではありません
- 信号を妨害するのが難しい
スペクトラム拡散技術はもともと軍事用途向けに設計されていましたが、現在では商業目的で広く使用されています。