Kurzanleitung
In der modernen Welt der Elektronik ist der Begriff Digital wird in der Regel mit einem Computer verbunden, weil der Begriff Digitalwird aus der Art und Weise abgeleitet, wie Computer Operationen ausführen, indem Ziffern gezählt werden. Die Anwendung der digitalen Elektronik war viele Jahre nur im Computersystem möglich. Heutzutage wird digitale Elektronik in vielen anderen Anwendungen eingesetzt. Es folgen einige Beispiele, in denenDigital electronics wird stark genutzt.
- Industrielle Prozesskontrolle
- Militärisches System
- Television
- Kommunikationssystem
- Medizinische Ausrüstung
- Radar
- Navigation
Signal
Signalkann als physikalische Größe definiert werden, die einige Informationen enthält. Es ist eine Funktion einer oder mehrerer unabhängiger Variablen. Es gibt zwei Arten von Signalen.
- Analogsignal
- Digitalsignal
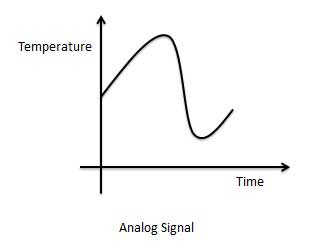
Analogsignal
Ein analog signalist definiert als das Signal mit kontinuierlichen Werten. Das analoge Signal kann unendlich viele verschiedene Werte haben. Im realen Szenario sind die meisten in der Natur beobachteten Dinge analog. Beispiele für die analogen Signale folgen.
- Temperature
- Pressure
- Distance
- Sound
- Voltage
- Current
- Power
Grafische Darstellung des analogen Signals (Temperatur)
Die Schaltungen, die die analogen Signale verarbeiten, werden als analoge Schaltungen oder Systeme bezeichnet. Beispiele für das analoge System folgen.
- Filter
- Amplifiers
- Fernsehempfänger
- Motordrehzahlregler
Nachteil von analogen Systemen
- Weniger Genauigkeit
- Weniger Vielseitigkeit
- Mehr Geräuscheffekt
- Mehr Verzerrung
- Mehr Einfluss des Wetters
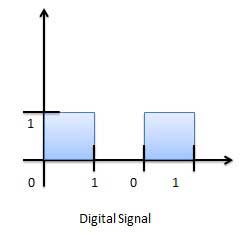
Digitalsignal
EIN digital signalist definiert als das Signal, das nur eine endliche Anzahl unterschiedlicher Werte hat. Digitale Signale sind keine kontinuierlichen Signale. Im digitalen elektronischen Taschenrechner erfolgt die Eingabe mit Hilfe von Schaltern. Dieser Eingang wird in ein elektrisches Signal umgewandelt, das zwei diskrete Werte oder Pegel aufweist. Eines davon kann als niedriges Niveau und ein anderes als hohes Niveau bezeichnet werden. Das Signal ist immer einer der beiden Pegel. Diese Art von Signal wird als digitales Signal bezeichnet. Beispiele für das digitale Signal folgen.
- Binäres Signal
- Oktalsignal
- Hexadezimales Signal
Grafische Darstellung des digitalen Signals (binär)
Die Schaltungen, die die digitalen Signale verarbeiten, werden als digitale Systeme oder digitale Schaltungen bezeichnet. Beispiele für die digitalen Systeme folgen.
- Registers
- Flip-flop
- Counters
- Microprocessors
Vorteil digitaler Systeme
- Mehr Genauigkeit
- Mehr Vielseitigkeit
- Weniger Verzerrung
- Einfache Kommunikation
- Mögliche Speicherung von Informationen
Vergleich von analogem und digitalem Signal
| SN | Analogsignal | Digitalsignal |
|---|---|---|
| 1 | Das analoge Signal hat unendlich viele Werte. | Das digitale Signal hat eine endliche Anzahl von Werten. |
| 2 | Das analoge Signal ist kontinuierlich. | Das digitale Signal ist diskreter Natur. |
| 3 | Analoges Signal wird von Wandlern und Signalgeneratoren erzeugt. | Das digitale Signal wird vom A / D-Wandler erzeugt. |
| 4 | Beispiel für ein analoges Signal - Sinuswelle, Dreieckswellen. | Beispiel für ein digitales Signal - ein binäres Signal. |
Ein digitales System kann das Positionsnummernsystem nur verstehen, wenn es einige Symbole gibt, die als Ziffern bezeichnet werden, und diese Symbole repräsentieren unterschiedliche Werte, abhängig von der Position, die sie in der Nummer einnehmen.
Ein Wert jeder Ziffer in einer Zahl kann mit bestimmt werden
Die Ziffer
Die Position der Ziffer in der Nummer
Die Basis des Zahlensystems (wobei Basis als die Gesamtzahl der im Zahlensystem verfügbaren Ziffern definiert ist).
Dezimalzahlensystem
Das Zahlensystem, das wir in unserem täglichen Leben verwenden, ist das Dezimalzahlensystem. Das Dezimalzahlensystem hat die Basis 10, da es 10 Ziffern von 0 bis 9 verwendet. Im Dezimalzahlensystem stehen die aufeinanderfolgenden Positionen links vom Dezimalpunkt für Einheiten, Zehner, Hunderter, Tausender usw.
Jede Position repräsentiert eine bestimmte Kraft der Basis (10). Beispielsweise besteht die Dezimalzahl 1234 aus der Ziffer 4 an der Einheitsposition, 3 an der Zehnerposition, 2 an der Hunderterposition und 1 an der Tausenderposition, und ihr Wert kann wie folgt geschrieben werden
(1×1000) + (2×100) + (3×10) + (4×l)
(1×103) + (2×102) + (3×101) + (4×l00)
1000 + 200 + 30 + 1
1234Als Computerprogrammierer oder IT-Experte sollten Sie die folgenden Zahlensysteme verstehen, die häufig in Computern verwendet werden.
| SN | Zahlensystem & Beschreibung |
|---|---|
| 1 | Binary Number System Basis 2. Verwendete Ziffern: 0, 1 |
| 2 | Octal Number System Basis 8. Verwendete Ziffern: 0 bis 7 |
| 3 | Hexa Decimal Number System Basis 16. Verwendete Ziffern: 0 bis 9, Verwendete Buchstaben: A- F. |
Binärzahlensystem
Eigenschaften
Verwendet zwei Ziffern, 0 und 1.
Wird auch als Basis-2-Zahlensystem bezeichnet
Jede Position in einer Binärzahl repräsentiert eine 0-Potenz der Basis (2). Beispiel: 2 0
Die letzte Position in einer Binärzahl repräsentiert eine x-Potenz der Basis (2). Beispiel: 2 x wobei x die letzte Position darstellt - 1.
Beispiel
Binärzahl: 10101 2
Dezimaläquivalent berechnen -
| Schritt | Binäre Zahl | Dezimalzahl |
|---|---|---|
| Schritt 1 | 10101 2 | ((1 × 2 4 ) + (0 × 2 3 ) + (1 × 2 2 ) + (0 × 2 1 ) + (1 × 2 0 )) 10 |
| Schritt 2 | 10101 2 | (16 + 0 + 4 + 0 + 1) 10 |
| Schritt 3 | 10101 2 | 21 10 |
Note:10101 2 wird normalerweise als 10101 geschrieben.
Oktalzahlensystem
Eigenschaften
Verwendet acht Ziffern, 0,1,2,3,4,5,6,7.
Wird auch als Basis-8-Zahlensystem bezeichnet
Jede Position in einer Oktalzahl repräsentiert eine 0-Potenz der Basis (8). Beispiel: 8 0
Die letzte Position in einer Oktalzahl repräsentiert eine x-Potenz der Basis (8). Beispiel: 8 x wobei x die letzte Position darstellt - 1.
Beispiel
Oktalzahl - 12570 8
Dezimaläquivalent berechnen -
| Schritt | Oktalzahl | Dezimalzahl |
|---|---|---|
| Schritt 1 | 12570 8 | ((1 × 8 4 ) + (2 × 8 3 ) + (5 × 8 2 ) + (7 × 8 1 ) + (0 × 8 0 )) 10 |
| Schritt 2 | 12570 8 | (4096 + 1024 + 320 + 56 + 0) 10 |
| Schritt 3 | 12570 8 | 5496 10 |
Note:12570 8 wird normalerweise als 12570 geschrieben.
Hexadezimalzahlensystem
Eigenschaften
Verwendet 10 Ziffern und 6 Buchstaben, 0,1,2,3,4,5,6,7,8,9, A, B, C, D, E, F.
Buchstaben stehen für Zahlen ab 10. A = 10, B = 11, C = 12, D = 13, E = 14, F = 15.
Wird auch als Basis-16-Zahlensystem bezeichnet.
Jede Position in einer Hexadezimalzahl repräsentiert eine 0-Potenz der Basis (16). Beispiel 16 0 .
Die letzte Position in einer Hexadezimalzahl repräsentiert eine x-Potenz der Basis (16). Beispiel 16 x wobei x die letzte Position darstellt - 1.
Beispiel -
Hexadezimalzahl: 19FDE 16
Dezimaläquivalent berechnen -
| Schritt | Hexadezimalzahl | Dezimalzahl |
|---|---|---|
| Schritt 1 | 19FDE 16 | ((1 × 16 4 ) + (9 × 16 3 ) + (F × 16 2 ) + (D × 16 1 ) + (E × 16 0 )) 10 |
| Schritt 2 | 19FDE 16 | ((1 × 16 4 ) + (9 × 16 3 ) + (15 × 16 2 ) + (13 × 16 1 ) + (14 × 16 0 )) 10 |
| Schritt 3 | 19FDE 16 | (65536 + 36864 + 3840 + 208 + 14) 10 |
| Schritt 4 | 19FDE 16 | 106462 10 |
Note −19FDE 16 wird normalerweise als 19FDE geschrieben.
Es gibt viele Methoden oder Techniken, mit denen Zahlen von einer Basis in eine andere konvertiert werden können. Wir werden hier folgendes demonstrieren -
- Dezimal zu anderem Basissystem
- Anderes Basissystem auf Dezimal
- Anderes Basissystem auf Nicht-Dezimal
- Verknüpfungsmethode - Binär zu Oktal
- Verknüpfungsmethode - Oktal zu Binär
- Verknüpfungsmethode - Binär zu Hexadezimal
- Verknüpfungsmethode - Hexadezimal zu Binär
Dezimal zu anderem Basissystem
Schritte
Step 1 - Teilen Sie die zu konvertierende Dezimalzahl durch den Wert der neuen Basis.
Step 2 - Holen Sie sich den Rest aus Schritt 1 als die am weitesten rechts stehende Ziffer (niedrigstwertige Ziffer) der neuen Basisnummer.
Step 3 - Teilen Sie den Quotienten der vorherigen Division durch die neue Basis.
Step 4 - Notieren Sie den Rest aus Schritt 3 als nächste Ziffer (links) der neuen Basisnummer.
Wiederholen Sie die Schritte 3 und 4, um die Reste von rechts nach links zu erhalten, bis der Quotient in Schritt 3 Null wird.
Der letzte so erhaltene Rest ist die signifikanteste Ziffer (MSD) der neuen Basisnummer.
Beispiel -
Dezimalzahl: 29 10
Berechnung des binären Äquivalents -
| Schritt | Betrieb | Ergebnis | Rest |
|---|---|---|---|
| Schritt 1 | 29/2 | 14 | 1 |
| Schritt 2 | 14/2 | 7 | 0 |
| Schritt 3 | 7/2 | 3 | 1 |
| Schritt 4 | 3/2 | 1 | 1 |
| Schritt 5 | 1/2 | 0 | 1 |
Wie in den Schritten 2 und 4 erwähnt, müssen die Reste in umgekehrter Reihenfolge angeordnet werden, damit der erste Rest zur kleinsten signifikanten Ziffer (LSD) und der letzte Rest zur signifikantesten Ziffer (MSD) wird.
Dezimalzahl - 29 10 = Binärzahl - 11101 2 .
Anderes Basissystem zum Dezimalsystem
Schritte
Step 1 - Bestimmen Sie den Spaltenwert (Positionswert) jeder Ziffer (dies hängt von der Position der Ziffer und der Basis des Zahlensystems ab).
Step 2 - Multiplizieren Sie die erhaltenen Spaltenwerte (in Schritt 1) mit den Ziffern in den entsprechenden Spalten.
Step 3 - Summieren Sie die in Schritt 2 berechneten Produkte. Die Summe ist der äquivalente Wert in Dezimalzahl.
Beispiel
Binärzahl - 11101 2
Dezimaläquivalent berechnen -
| Schritt | Binäre Zahl | Dezimalzahl |
|---|---|---|
| Schritt 1 | 11101 2 | ((1 × 2 4 ) + (1 × 2 3 ) + (1 × 2 2 ) + (0 × 2 1 ) + (1 × 2 0 )) 10 |
| Schritt 2 | 11101 2 | (16 + 8 + 4 + 0 + 1) 10 |
| Schritt 3 | 11101 2 | 29 10 |
Binärzahl - 11101 2 = Dezimalzahl - 29 10
Anderes Basissystem zum Nicht-Dezimalsystem
Schritte
Step 1 - Konvertieren Sie die ursprüngliche Zahl in eine Dezimalzahl (Basis 10).
Step 2 - Konvertieren Sie die so erhaltene Dezimalzahl in die neue Basiszahl.
Beispiel
Oktalzahl - 25 8
Berechnung des binären Äquivalents -
Schritt 1 - In Dezimal konvertieren
| Schritt | Oktalzahl | Dezimalzahl |
|---|---|---|
| Schritt 1 | 25 8 | ((2 × 8 1 ) + (5 × 8 0 )) 10 |
| Schritt 2 | 25 8 | (16 + 5) 10 |
| Schritt 3 | 25 8 | 21 10 |
Oktalzahl - 25 8 = Dezimalzahl - 21 10
Schritt 2 - Konvertieren Sie Dezimal in Binär
| Schritt | Betrieb | Ergebnis | Rest |
|---|---|---|---|
| Schritt 1 | 21/2 | 10 | 1 |
| Schritt 2 | 10/2 | 5 | 0 |
| Schritt 3 | 5/2 | 2 | 1 |
| Schritt 4 | 2/2 | 1 | 0 |
| Schritt 5 | 1/2 | 0 | 1 |
Dezimalzahl - 21 10 = Binärzahl - 10101 2
Oktalzahl - 25 8 = Binärzahl - 10101 2
Verknüpfungsmethode - Binär zu Oktal
Schritte
Step 1 - Teilen Sie die Binärziffern in Dreiergruppen (von rechts beginnend).
Step 2 - Konvertieren Sie jede Gruppe von drei Binärziffern in eine Oktalzahl.
Beispiel
Binärzahl - 10101 2
Berechnung des Oktaläquivalents -
| Schritt | Binäre Zahl | Oktalzahl |
|---|---|---|
| Schritt 1 | 10101 2 | 010 101 |
| Schritt 2 | 10101 2 | 2 8 5 8 |
| Schritt 3 | 10101 2 | 25 8 |
Binärzahl - 10101 2 = Oktalzahl - 25 8
Verknüpfungsmethode - Oktal zu Binär
Schritte
Step 1 - Konvertieren Sie jede Oktalstelle in eine dreistellige Binärzahl (die Oktalstellen können bei dieser Konvertierung als Dezimalzahl behandelt werden).
Step 2 - Kombinieren Sie alle resultierenden Binärgruppen (mit jeweils 3 Ziffern) zu einer einzigen Binärzahl.
Beispiel
Oktalzahl - 25 8
Berechnung des binären Äquivalents -
| Schritt | Oktalzahl | Binäre Zahl |
|---|---|---|
| Schritt 1 | 25 8 | 2 10 5 10 |
| Schritt 2 | 25 8 | 010 2 101 2 |
| Schritt 3 | 25 8 | 010101 2 |
Oktalzahl - 25 8 = Binärzahl - 10101 2
Verknüpfungsmethode - Binär zu Hexadezimal
Schritte
Step 1 - Teilen Sie die Binärziffern in Vierergruppen (von rechts beginnend).
Step 2 - Konvertieren Sie jede Gruppe von vier Binärziffern in ein Hexadezimalsymbol.
Beispiel
Binärzahl - 10101 2
Berechnung des hexadezimalen Äquivalents -
| Schritt | Binäre Zahl | Hexadezimalzahl |
|---|---|---|
| Schritt 1 | 10101 2 | 0001 0101 |
| Schritt 2 | 10101 2 | 1 10 5 10 |
| Schritt 3 | 10101 2 | 15 16 |
Binärzahl - 10101 2 = Hexadezimalzahl - 15 16
Verknüpfungsmethode - Hexadezimal zu Binär
Schritte
Step 1 - Konvertieren Sie jede hexadezimale Ziffer in eine 4-stellige Binärzahl (die hexadezimalen Ziffern können für diese Konvertierung als Dezimalzahl behandelt werden).
Step 2 - Kombinieren Sie alle resultierenden Binärgruppen (mit jeweils 4 Ziffern) zu einer einzigen Binärzahl.
Beispiel
Hexadezimalzahl - 15 16
Berechnung des binären Äquivalents -
| Schritt | Hexadezimalzahl | Binäre Zahl |
|---|---|---|
| Schritt 1 | 15 16 | 1 10 5 10 |
| Schritt 2 | 15 16 | 0001 2 0101 2 |
| Schritt 3 | 15 16 | 00010101 2 |
Hexadezimalzahl - 15 16 = Binärzahl - 10101 2
Wenn bei der Codierung Zahlen, Buchstaben oder Wörter durch eine bestimmte Gruppe von Symbolen dargestellt werden, wird gesagt, dass die Zahl, der Buchstabe oder das Wort codiert wird. Die Gruppe von Symbolen wird als Code bezeichnet. Die digitalen Daten werden als Gruppe von Binärbits dargestellt, gespeichert und übertragen. Diese Gruppe wird auch als bezeichnetbinary code. Der Binärcode wird durch die Zahl sowie den alphanumerischen Buchstaben dargestellt.
Vorteile des Binärcodes
Im Folgenden finden Sie eine Liste der Vorteile, die Binärcode bietet.
Binärcodes sind für Computeranwendungen geeignet.
Binärcodes sind für die digitale Kommunikation geeignet.
Binärcodes analysieren und entwerfen digitale Schaltkreise, wenn wir die Binärcodes verwenden.
Da nur 0 & 1 verwendet werden, wird die Implementierung einfach.
Klassifizierung von Binärcodes
Die Codes sind grob in die folgenden vier Kategorien unterteilt.
- Gewichtete Codes
- Nicht gewichtete Codes
- Binär codierter Dezimalcode
- Alphanumerische Codes
- Fehler beim Erkennen von Codes
- Fehlerkorrekturcodes
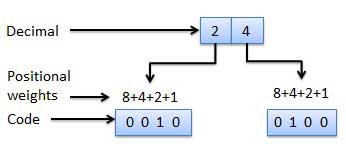
Gewichtete Codes
Gewichtete Binärcodes sind solche Binärcodes, die dem Positionsgewichtsprinzip folgen. Jede Position der Nummer repräsentiert ein bestimmtes Gewicht. Mehrere Systeme der Codes werden verwendet, um die Dezimalstellen 0 bis 9 auszudrücken. In diesen Codes wird jede Dezimalstelle durch eine Gruppe von vier Bits dargestellt.
Nicht gewichtete Codes
Bei dieser Art von Binärcodes werden die Positionsgewichte nicht zugewiesen. Die Beispiele für nicht gewichtete Codes sind Excess-3-Code und Gray-Code.
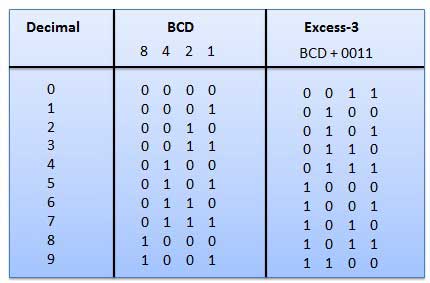
Überschüssiger 3-Code
Der Excess-3-Code wird auch als XS-3-Code bezeichnet. Es ist ein nicht gewichteter Code, der zum Ausdrücken von Dezimalzahlen verwendet wird. Die Überschuss-3-Codewörter werden aus den 8421-BCD-Codewörtern abgeleitet, die (0011) 2 oder (3) 10 zu jedem Codewort in 8421 hinzufügen. Die Überschuss-3-Codes werden wie folgt erhalten:

Beispiel
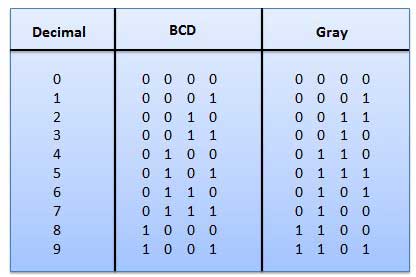
Gray Code
Es ist der nicht gewichtete Code und es sind keine arithmetischen Codes. Das heißt, der Bitposition sind keine spezifischen Gewichte zugeordnet. Es hat eine ganz besondere Eigenschaft, dass sich jedes Mal, wenn die Dezimalzahl erhöht wird, nur ein Bit ändert, wie in Abb. 1 gezeigt. Da sich jeweils nur ein Bit ändert, wird der Graucode als Einheitsentfernungscode bezeichnet. Der graue Code ist ein zyklischer Code. Gray-Code kann nicht für arithmetische Operationen verwendet werden.
Anwendung von Gray Code
Gray-Code wird häufig in Wellenpositionsgebern verwendet.
Ein Wellenpositionsgeber erzeugt ein Codewort, das die Winkelposition der Welle darstellt.
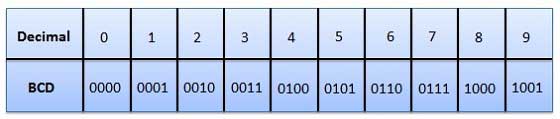
BCD-Code (Binary Coded Decimal)
In diesem Code wird jede Dezimalstelle durch eine 4-Bit-Binärzahl dargestellt. BCD ist eine Möglichkeit, jede der Dezimalstellen mit einem Binärcode auszudrücken. In der BCD können wir mit vier Bits sechzehn Zahlen darstellen (0000 bis 1111). Im BCD-Code werden jedoch nur die ersten zehn verwendet (0000 bis 1001). Die verbleibenden sechs Codekombinationen, dh 1010 bis 1111, sind in BCD ungültig.
Vorteile von BCD-Codes
- Es ist dem Dezimalsystem sehr ähnlich.
- Wir müssen uns nur das binäre Äquivalent der Dezimalzahlen 0 bis 9 merken.
Nachteile von BCD-Codes
Das Addieren und Subtrahieren von BCD hat unterschiedliche Regeln.
Die BCD-Arithmetik ist etwas komplizierter.
BCD benötigt mehr Bits als Binärbits, um die Dezimalzahl darzustellen. BCD ist also weniger effizient als binär.
Alphanumerische Codes
Eine binäre Ziffer oder ein binäres Bit kann nur zwei Symbole darstellen, da es nur zwei Zustände '0' oder '1' hat. Dies reicht jedoch nicht für die Kommunikation zwischen zwei Computern aus, da wir dort viel mehr Symbole für die Kommunikation benötigen. Diese Symbole müssen 26 Alphabete mit Groß- und Kleinbuchstaben, Zahlen von 0 bis 9, Satzzeichen und anderen Symbolen darstellen.
Die alphanumerischen Codes sind die Codes, die Zahlen und alphabetische Zeichen darstellen. Meistens repräsentieren solche Codes auch andere Zeichen wie Symbole und verschiedene Anweisungen, die zur Übermittlung von Informationen erforderlich sind. Ein alphanumerischer Code sollte mindestens 10 Ziffern und 26 Buchstaben des Alphabets darstellen, dh insgesamt 36 Elemente. Die folgenden drei alphanumerischen Codes werden sehr häufig für die Datendarstellung verwendet.
- Amerikanischer Standardcode für den Informationsaustausch (ASCII).
- Erweiterter binär codierter Dezimalaustauschcode (EBCDIC).
- Fünf-Bit-Baudot-Code.
ASCII-Code ist ein 7-Bit-Code, während EBCDIC ein 8-Bit-Code ist. ASCII-Code wird weltweit häufiger verwendet, während EBCDIC hauptsächlich in großen IBM Computern verwendet wird.
Fehlercodes
Es stehen Binärcodetechniken zur Verfügung, um Daten während der Datenübertragung zu erkennen und zu korrigieren.
| Fehlercode | Beschreibung |
|---|---|
Fehlererkennung und -korrektur |
Techniken zur Fehlererkennung und -korrektur |
Es gibt viele Methoden oder Techniken, mit denen Code von einem Format in ein anderes konvertiert werden kann. Wir werden hier Folgendes demonstrieren
- Konvertierung von Binär zu BCD
- Umwandlung von BCD in Binär
- BCD zu Excess-3
- Excess-3 zu BCD
Konvertierung von Binär zu BCD
Schritte
Step 1 - Konvertieren Sie die Binärzahl in eine Dezimalzahl.
Step 2 - Konvertieren Sie die Dezimalzahl in BCD.
Beispiel - Konvertieren Sie (11101) 2 in BCD.
Schritt 1 - In Dezimal konvertieren
Binärzahl - 11101 2
Dezimaläquivalent berechnen -
| Schritt | Binäre Zahl | Dezimalzahl |
|---|---|---|
| Schritt 1 | 11101 2 | ((1 × 2 4 ) + (1 × 2 3 ) + (1 × 2 2 ) + (0 × 2 1 ) + (1 × 2 0 )) 10 |
| Schritt 2 | 11101 2 | (16 + 8 + 4 + 0 + 1) 10 |
| Schritt 3 | 11101 2 | 29 10 |
Binärzahl - 11101 2 = Dezimalzahl - 29 10
Schritt 2 - In BCD konvertieren
Dezimalzahl - 29 10
Berechnung des BCD-Äquivalents. Konvertieren Sie jede Ziffer in Gruppen von vier äquivalenten Binärziffern.
| Schritt | Dezimalzahl | Umwandlung |
|---|---|---|
| Schritt 1 | 29 10 | 0010 2 1001 2 |
| Schritt 2 | 29 10 | 00101001 BCD |
Ergebnis
(11101)2 = (00101001)BCDUmwandlung von BCD in Binär
Schritte
Step 1 - Konvertieren Sie die BCD-Nummer in eine Dezimalzahl.
Step 2 - Dezimal in Binär umwandeln.
Beispiel - Konvertieren Sie (00101001) BCD in Binär.
Schritt 1 - In BCD konvertieren
BCD-Nummer - (00101001) BCD
Dezimaläquivalent berechnen. Konvertieren Sie jede vierstellige Zahl in eine Gruppe und erhalten Sie für jede Gruppe ein Dezimaläquivalent.
| Schritt | BCD-Nummer | Umwandlung |
|---|---|---|
| Schritt 1 | (00101001) BCD | 0010 2 1001 2 |
| Schritt 2 | (00101001) BCD | 2 10 9 10 |
| Schritt 3 | (00101001) BCD | 29 10 |
BCD-Nummer - (00101001) BCD = Dezimalzahl - 29 10
Schritt 2 - In Binär konvertieren
Verwendet die Methode der langen Teilung für die Umwandlung von Dezimal in Binär.
Dezimalzahl - 29 10
Berechnung des binären Äquivalents -
| Schritt | Betrieb | Ergebnis | Rest |
|---|---|---|---|
| Schritt 1 | 29/2 | 14 | 1 |
| Schritt 2 | 14/2 | 7 | 0 |
| Schritt 3 | 7/2 | 3 | 1 |
| Schritt 4 | 3/2 | 1 | 1 |
| Schritt 5 | 1/2 | 0 | 1 |
Wie in den Schritten 2 und 4 erwähnt, müssen die Reste in umgekehrter Reihenfolge angeordnet werden, damit der erste Rest zur niedrigstwertigen Ziffer (LSD) und der letzte Rest zur höchstwertigen Ziffer (MSD) wird.
Dezimalzahl - 29 10 = Binärzahl - 11101 2
Ergebnis
(00101001)BCD = (11101)2BCD zu Excess-3
Schritte
Step 1 - Konvertieren Sie BCD in Dezimalzahlen.
Step 2- Addieren Sie (3) 10 zu dieser Dezimalzahl.
Step 3 - In Binär umwandeln, um überschüssigen 3-Code zu erhalten.
Beispiel - Konvertieren Sie (0110) BCD in Excess-3.
Schritt 1 - In Dezimalzahl konvertieren
(0110) BCD = 6 10
Schritt 2 - Addieren Sie 3 zur Dezimalstelle
(6) 10 + (3) 10 = (9) 10
Schritt 3 - In Überschuss-3 konvertieren
(9) 10 = (1001) 2
Ergebnis
(0110)BCD = (1001)XS-3Konvertierung von überschüssigem 3 in BCD
Schritte
Step 1- Subtrahieren Sie (0011) 2 von jedem 4-Bit-Überschuss-3-Ziffern, um den entsprechenden BCD-Code zu erhalten.
Beispiel - Konvertieren Sie (10011010) XS-3 in BCD.
Given XS-3 number = 1 0 0 1 1 0 1 0
Subtract (0011)2 = 1 0 0 1 0 1 1 1
--------------------
BCD = 0 1 1 0 0 1 1 1Ergebnis
(10011010)XS-3 = (01100111)BCDIn den digitalen Computern werden Ergänzungen verwendet, um die Subtraktionsoperation und die logischen Manipulationen zu vereinfachen. Für jedes Radix-r-System (Radix r steht für die Basis des Zahlensystems) gibt es zwei Arten von Ergänzungen.
| SN | Ergänzen | Beschreibung |
|---|---|---|
| 1 | Radix-Ergänzung | Das Radixkomplement wird als das r-Komplement bezeichnet |
| 2 | Verminderte Radix-Ergänzung | Das verringerte Radixkomplement wird als das (r-1) -Komplement bezeichnet |
Binärsystem ergänzt
Da das binäre System die Basis r = 2 hat, sind die beiden Arten von Komplementen für das binäre System das Komplement von 2 und das Komplement von 1.
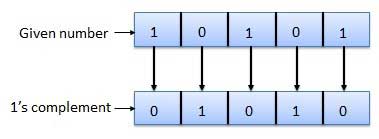
1's Ergänzung
Das Einsenkomplement einer Zahl wird gefunden, indem alle Einsen in Nullen und alle Nullen in Einsen geändert werden. Dies wird als Komplement oder 1-Komplement bezeichnet. Das Beispiel für das Komplement von 1 ist wie folgt.
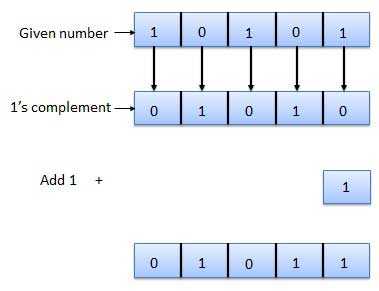
2's Ergänzung
Das 2er-Komplement der Binärzahl wird erhalten, indem 1 zum kleinsten signifikanten Bit (LSB) des 1er-Komplements der Zahl addiert wird.
2er-Komplement = 1er-Komplement + 1
Das Beispiel für das Komplement von 2 ist wie folgt.
Binäre Arithmetik ist ein wesentlicher Bestandteil aller digitalen Computer und vieler anderer digitaler Systeme.
Binäre Addition
Es ist ein Schlüssel für die binäre Subtraktion, Multiplikation und Division. Es gibt vier Regeln für die binäre Addition.
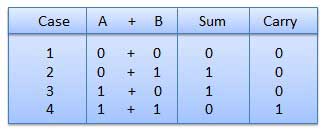
Im vierten Fall erzeugt eine binäre Addition eine Summe von (1 + 1 = 10), dh 0 wird in die gegebene Spalte geschrieben und eine Übertragung von 1 in die nächste Spalte.
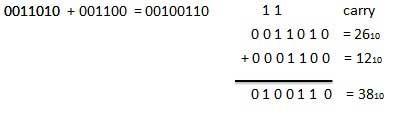
Beispiel - Addition
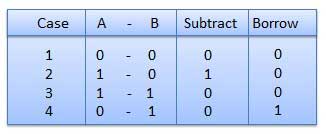
Binäre Subtraktion
Subtraction and Borrowwerden diese beiden Wörter sehr häufig für die binäre Subtraktion verwendet. Es gibt vier Regeln für die binäre Subtraktion.
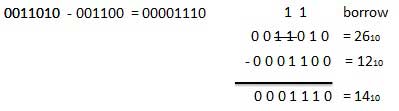
Beispiel - Subtraktion
Binäre Multiplikation
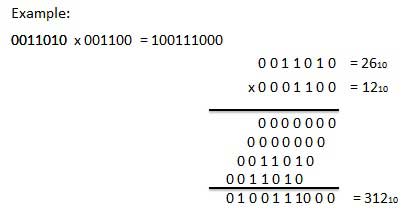
Die binäre Multiplikation ähnelt der dezimalen Multiplikation. Es ist einfacher als die Dezimalmultiplikation, da nur Nullen und Einsen beteiligt sind. Es gibt vier Regeln für die binäre Multiplikation.
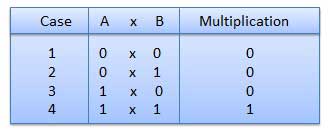
Beispiel - Multiplikation
Binäre Abteilung
Die binäre Division ähnelt der dezimalen Division. Es wird als Long-Division-Verfahren bezeichnet.
Beispiel - Division

Oktalzahlensystem
Es folgen die Eigenschaften eines Oktalzahlensystems.
Verwendet acht Ziffern, 0,1,2,3,4,5,6,7.
Wird auch als Basis-8-Zahlensystem bezeichnet.
Jede Position in einer Oktalzahl repräsentiert eine 0-Potenz der Basis (8). Beispiel: 8 0
Die letzte Position in einer Oktalzahl repräsentiert eine x-Potenz der Basis (8). Beispiel: 8 x wobei x die letzte Position darstellt - 1.
Beispiel
Oktalzahl - 12570 8
Dezimaläquivalent berechnen -
| Schritt | Oktalzahl | Dezimalzahl |
|---|---|---|
| Schritt 1 | 12570 8 | ((1 × 8 4 ) + (2 × 8 3 ) + (5 × 8 2 ) + (7 × 8 1 ) + (0 × 8 0 )) 10 |
| Schritt 2 | 12570 8 | (4096 + 1024 + 320 + 56 + 0) 10 |
| Schritt 3 | 12570 8 | 5496 10 |
Note −12570 8 wird normalerweise als 12570 geschrieben.
Oktale Addition
Die folgende Tabelle zur Oktaladdition hilft Ihnen bei der Handhabung der Oktaladdition.
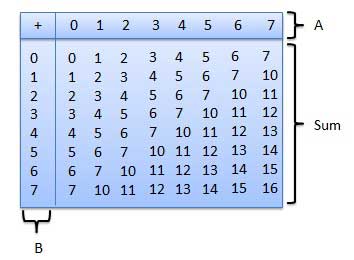
Befolgen Sie zur Verwendung dieser Tabelle einfach die Anweisungen in diesem Beispiel: Fügen Sie 6 8 und 5 8 hinzu . Suchen Sie 6 in der Spalte A und dann die 5 in der Spalte B. Der Punkt im Bereich "Summe", an dem sich diese beiden Spalten schneiden, ist die "Summe" zweier Zahlen.
68 + 58 = 138.Beispiel - Addition
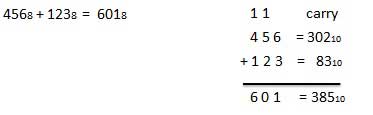
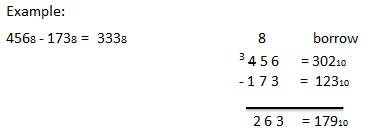
Oktale Subtraktion
Die Subtraktion von Oktalzahlen folgt den gleichen Regeln wie die Subtraktion von Zahlen in jedem anderen Zahlensystem. Die einzige Variation ist die geliehene Anzahl. Im Dezimalsystem leihen Sie sich eine Gruppe von 10 10 aus . Im Binärsystem leihen Sie sich eine Gruppe von 2 10 aus . Im Oktalsystem leihen Sie sich eine Gruppe von 8 10 aus .
Beispiel - Subtraktion
Hexadezimalzahlensystem
Nachfolgend sind die Merkmale eines Hexadezimalzahlensystems aufgeführt.
Verwendet 10 Ziffern und 6 Buchstaben, 0,1,2,3,4,5,6,7,8,9, A, B, C, D, E, F.
Buchstaben stehen für Zahlen ab 10. A = 10, B = 11, C = 12, D = 13, E = 14, F = 15.
Wird auch als Basis-16-Zahlensystem bezeichnet.
Jede Position in einer Hexadezimalzahl repräsentiert eine 0-Potenz der Basis (16). Beispiel - 16 0
Die letzte Position in einer Hexadezimalzahl repräsentiert eine x-Potenz der Basis (16). Beispiel - 16 x wobei x die letzte Position darstellt - 1.
Beispiel
Hexadezimalzahl - 19FDE 16
Dezimaläquivalent berechnen -
| Schritt | Hexadezimalzahl | Dezimalzahl |
|---|---|---|
| Schritt 1 | 19FDE 16 | ((1 × 16 4 ) + (9 × 16 3 ) + (F × 16 2 ) + (D × 16 1 ) + (E × 16 0 )) 10 |
| Schritt 2 | 19FDE 16 | ((1 × 16 4 ) + (9 × 16 3 ) + (15 × 16 2 ) + (13 × 16 1 ) + (14 × 16 0 )) 10 |
| Schritt 3 | 19FDE 16 | (65536 + 36864 + 3840 + 208 + 14) 10 |
| Schritt 4 | 19FDE 16 | 106462 10 |
Note −19FDE 16 wird normalerweise als 19FDE geschrieben.
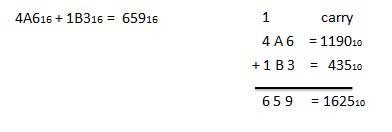
Hexadezimale Addition
Das Befolgen der hexadezimalen Additionstabelle hilft Ihnen bei der Handhabung der hexadezimalen Addition.
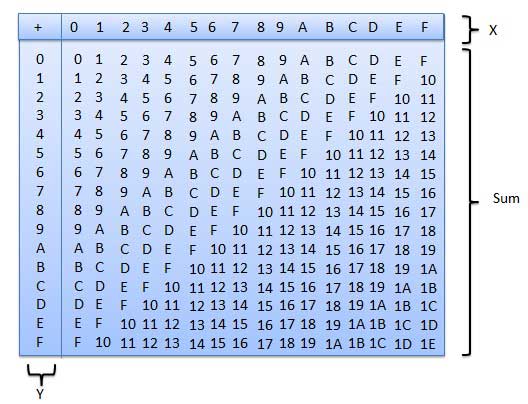
Befolgen Sie zur Verwendung dieser Tabelle einfach die Anweisungen in diesem Beispiel - Fügen Sie A 16 und 5 16 hinzu . Suchen Sie A in der X-Spalte und dann die 5 in der Y-Spalte. Der Punkt im Summenbereich, an dem sich diese beiden Spalten schneiden, ist die Summe zweier Zahlen.
A16 + 516 = F16.Beispiel - Addition
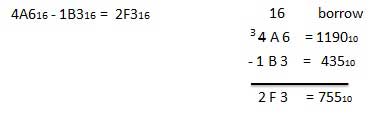
Hexadezimale Subtraktion
Die Subtraktion von Hexadezimalzahlen folgt den gleichen Regeln wie die Subtraktion von Zahlen in jedem anderen Zahlensystem. Die einzige Variation ist die geliehene Anzahl. Im Dezimalsystem leihen Sie sich eine Gruppe von 10 10 aus . Im Binärsystem leihen Sie sich eine Gruppe von 2 10 aus . Im Hexadezimalsystem leihen Sie sich eine Gruppe von 16 10 aus .
Beispiel - Subtraktion
Die Boolesche Algebra wird verwendet, um die digitalen (logischen) Schaltungen zu analysieren und zu vereinfachen. Es werden nur die Binärzahlen dh 0 und 1 verwendet. Es wird auch als bezeichnetBinary Algebra oder logical Algebra. Die Boolesche Algebra wurde von erfundenGeorge Boole im Jahre 1854.
Regel in der Booleschen Algebra
Im Folgenden sind die wichtigen Regeln aufgeführt, die in der Booleschen Algebra verwendet werden.
Die verwendete Variable kann nur zwei Werte haben. Binär 1 für HOCH und Binär 0 für NIEDRIG.
Das Komplement einer Variablen wird durch einen Überstrich (-) dargestellt. Somit wird das Komplement der Variablen B dargestellt als
. Wenn also B = 0, dann = 1 und B = 1, dann
= 0.
= 1 und B = 1, dann
= 0.
Die ODER-Verknüpfung der Variablen wird durch ein Pluszeichen (+) zwischen ihnen dargestellt. Zum Beispiel wird die OR-Verknüpfung von A, B, C als A + B + C dargestellt.
Die logische UND-Verknüpfung der zwei oder mehr Variablen wird durch Schreiben eines Punkts zwischen ihnen dargestellt, z. B. ABC. Manchmal kann der Punkt wie bei ABC weggelassen werden.
Boolesche Gesetze
Es gibt sechs Arten von Booleschen Gesetzen.
Kommutativgesetz
Jede binäre Operation, die den folgenden Ausdruck erfüllt, wird als kommutative Operation bezeichnet.

Das kommutative Gesetz besagt, dass das Ändern der Reihenfolge der Variablen keine Auswirkung auf den Ausgang einer Logikschaltung hat.
Assoziatives Recht
Dieses Gesetz besagt, dass die Reihenfolge, in der die logischen Operationen ausgeführt werden, irrelevant ist, da ihre Wirkung dieselbe ist.

Verteilungsrecht
Das Verteilungsgesetz legt die folgende Bedingung fest.

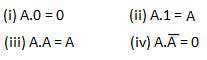
UND Gesetz
Diese Gesetze verwenden die UND-Operation. Deshalb heißen sie alsAND Rechtsvorschriften.
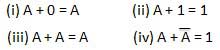
ODER Gesetz
Diese Gesetze verwenden die OP-Operation. Deshalb heißen sie alsOR Rechtsvorschriften.
INVERSIONSGESETZ
Dieses Gesetz verwendet die NOT-Operation. Das Inversionsgesetz besagt, dass die doppelte Inversion einer Variablen zur ursprünglichen Variablen selbst führt.

Wichtige boolesche Theoreme
Es folgen einige wichtige boolesche Theoreme.
| Boolesche Funktion / Theoreme | Beschreibung |
|---|---|
Boolesche Funktionen |
Boolesche Funktionen und Ausdrücke, K-Map- und NAND-Gates-Realisierung |
De Morgans Theoreme |
Satz 1 von De Morgan und Satz 2 |
Logikgatter sind die Grundbausteine eines jeden digitalen Systems. Es ist eine elektronische Schaltung mit einem oder mehreren Eingängen und nur einem Ausgang. Die Beziehung zwischen der Eingabe und der Ausgabe basiert auf acertain logic. Basierend darauf werden Logikgatter als UND-Gatter, ODER-Gatter, NICHT-Gatter usw. bezeichnet.
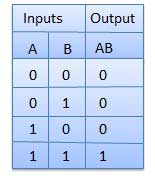
UND Tor
Eine Schaltung, die eine UND-Verknüpfung ausführt, ist in der Abbildung dargestellt. Es hat n Eingang (n> = 2) und einen Ausgang.

Logikdiagramm

Wahrheitstabelle
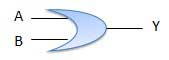
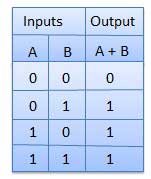
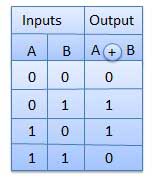
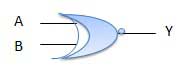
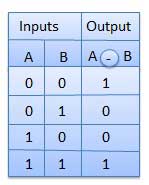
ODER Tor
Eine Schaltung, die eine ODER-Verknüpfung ausführt, ist in der Abbildung dargestellt. Es hat n Eingang (n> = 2) und einen Ausgang.

Logikdiagramm
Wahrheitstabelle
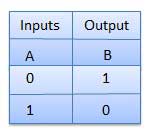
NICHT Tor
NICHT Tor ist auch bekannt als Inverter. Es hat einen Eingang A und einen Ausgang Y.

Logikdiagramm
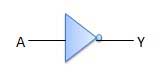
Wahrheitstabelle
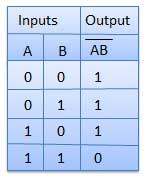
NAND-Tor
Eine NOT-AND-Operation wird als NAND-Operation bezeichnet. Es hat n Eingang (n> = 2) und einen Ausgang.

Logikdiagramm

Wahrheitstabelle
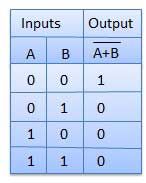
NOR-Tor
Eine NICHT-ODER-Operation wird als NOR-Operation bezeichnet. Es hat n Eingang (n> = 2) und einen Ausgang.

Logikdiagramm

Wahrheitstabelle
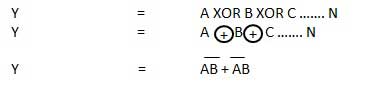
XOR-Tor
Das XOR- oder Ex-OR-Gatter ist ein spezieller Gattertyp. Es kann im Halbaddierer, Volladdierer und Subtrahierer verwendet werden. Das Exklusiv-ODER-Gatter wird als EX-ODER-Gatter oder manchmal als X-ODER-Gatter abgekürzt. Es hat n Eingang (n> = 2) und einen Ausgang.
Logikdiagramm

Wahrheitstabelle
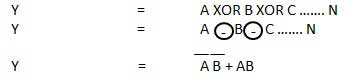
XNOR-Tor
Das XNOR-Gatter ist ein spezieller Gattertyp. Es kann im Halbaddierer, Volladdierer und Subtrahierer verwendet werden. Das Exklusiv-NOR-Gatter wird als EX-NOR-Gatter oder irgendwann als X-NOR-Gatter abgekürzt. Es hat n Eingang (n> = 2) und einen Ausgang.
Logikdiagramm
Wahrheitstabelle
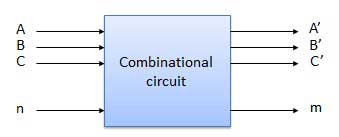
Die kombinatorische Schaltung ist eine Schaltung, in der wir die verschiedenen Gatter in der Schaltung kombinieren, beispielsweise Codierer, Decodierer, Multiplexer und Demultiplexer. Einige der Eigenschaften von Kombinationsschaltungen sind folgende:
Der Ausgang der Kombinationsschaltung zu jedem Zeitpunkt hängt nur von den an den Eingangsanschlüssen vorhandenen Pegeln ab.
Die Kombinationsschaltung verwendet keinen Speicher. Der vorherige Eingangszustand hat keine Auswirkung auf den gegenwärtigen Zustand der Schaltung.
Eine Kombinationsschaltung kann eine Anzahl von n Eingängen und eine Anzahl von m Ausgängen haben.
Blockdiagramm
Wir werden einige wichtige kombinatorische Schaltkreise wie folgt ausarbeiten.
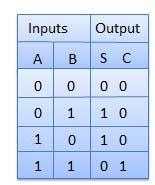
Halber Addierer
Der Halbaddierer ist eine kombinatorische Logikschaltung mit zwei Eingängen und zwei Ausgängen. Die Halbaddiererschaltung ist so ausgelegt, dass sie zwei Einzelbit-Binärzahlen A und B addiert. Sie ist der Grundbaustein für die Addition von zweisingleBitnummern. Diese Schaltung hat zwei Ausgängecarry und sum.
Blockdiagramm

Wahrheitstabelle
Schaltplan
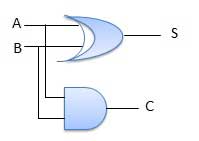
Volladdierer
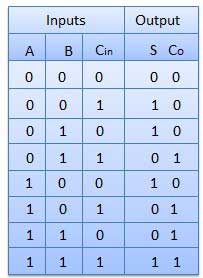
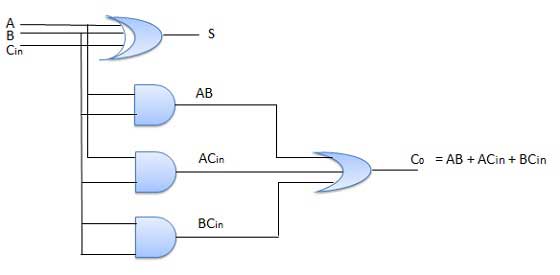
Der Volladdierer wurde entwickelt, um den Nachteil der Halbaddiererschaltung zu überwinden. Es kann zwei Ein-Bit-Zahlen A und B hinzufügen und c tragen. Der Volladdierer ist eine kombinatorische Schaltung mit drei Eingängen und zwei Ausgängen.
Blockdiagramm

Wahrheitstabelle
Schaltplan
N-Bit-Paralleladdierer
Der Volladdierer kann nur eine zweistellige Binärzahl zusammen mit einer Übertragseingabe hinzufügen. In der Praxis müssen wir jedoch Binärzahlen hinzufügen, die viel länger als nur ein Bit sind. Um zwei n-Bit-Binärzahlen hinzuzufügen, müssen wir den n-Bit-Paralleladdierer verwenden. Es werden mehrere Volladdierer in Kaskade verwendet. Der Übertragsausgang des vorherigen Volladdierers ist mit dem Übertragseingang des nächsten Volladdierers verbunden.
4-Bit-Paralleladdierer
In dem Blockdiagramm stellen A 0 und B 0 das LSB der vier Bitwörter A und B dar. Daher ist Full Adder-0 die niedrigste Stufe. Daher wurde sein C in permanent auf 0 gesetzt. Der Rest der Verbindungen ist genau der gleiche wie der des n-Bit-Paralleladdierers (siehe Abb. 1). Der 4-Bit-Paralleladdierer ist eine sehr verbreitete Logikschaltung.
Blockdiagramm

N-Bit Parallel Subtrahierer
Die Subtraktion kann durchgeführt werden, indem das 1er- oder 2er-Komplement der zu subtrahierenden Zahl genommen wird. Zum Beispiel können wir die Subtraktion (AB) durchführen, indem wir entweder das 1er- oder das 2er-Komplement von B zu A addieren. Das heißt, wir können einen binären Addierer verwenden, um die binäre Subtraktion durchzuführen.
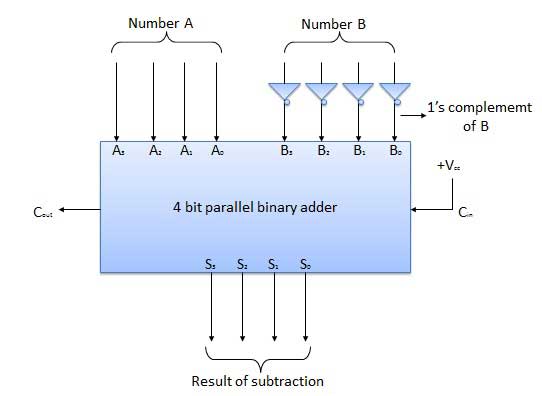
4-Bit-Parallel-Subtrahierer
Die zu subtrahierende Zahl (B) wird zuerst durch Wechselrichter geleitet, um das Komplement der 1 zu erhalten. Der 4-Bit-Addierer addiert dann das A- und 2-Komplement von B, um die Subtraktion zu erzeugen. S 3 S 2 S 1 S 0 repräsentiert das Ergebnis der binären Subtraktion (AB) und der Übertragsausgang C out repräsentiert die Polarität des Ergebnisses. Wenn A> B, dann ist Cout = 0 und das Ergebnis der Binärform (AB), dann ist C out = 1 und das Ergebnis liegt in der Komplementform der 2 vor.
Blockdiagramm
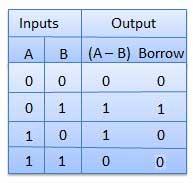
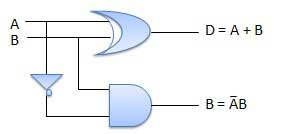
Halbe Subtrahierer
Der halbe Subtrahierer ist eine Kombinationsschaltung mit zwei Eingängen und zwei Ausgängen (Differenz und Ausleihe). Es erzeugt die Differenz zwischen den beiden Binärbits am Eingang und erzeugt auch einen Ausgang (Borrow), um anzuzeigen, ob eine 1 ausgeliehen wurde. In der Subtraktion (AB) wird A als Minuend-Bit und B als Subtrahend-Bit bezeichnet.
Wahrheitstabelle
Schaltplan
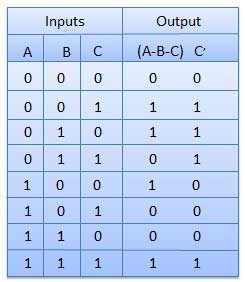
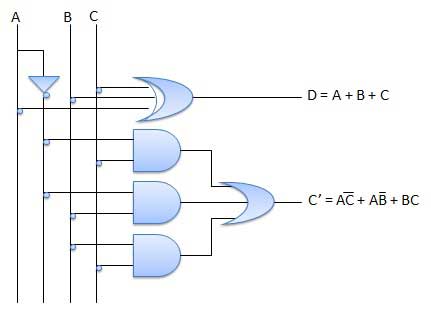
Volle Subtrahierer
Der Nachteil eines halben Subtrahierers wird durch einen vollen Subtrahierer überwunden. Der vollständige Subtrahierer ist eine Kombinationsschaltung mit drei Eingängen A, B, C und zwei Ausgängen D und C '. A ist das 'Minuend', B ist 'Subtrahend', C ist das 'Leihen', das von der vorherigen Stufe erzeugt wurde, D ist die Differenzausgabe und C 'ist die Ausleihausgabe.
Wahrheitstabelle
Schaltplan
Multiplexers
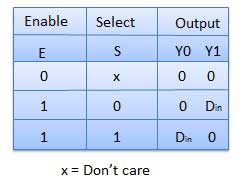
Multiplexer is a special type of combinational circuit. There are n-data inputs, one output and m select inputs with 2m = n. It is a digital circuit which selects one of the n data inputs and routes it to the output. The selection of one of the n inputs is done by the selected inputs. Depending on the digital code applied at the selected inputs, one out of n data sources is selected and transmitted to the single output Y. E is called the strobe or enable input which is useful for the cascading. It is generally an active low terminal that means it will perform the required operation when it is low.
Block diagram
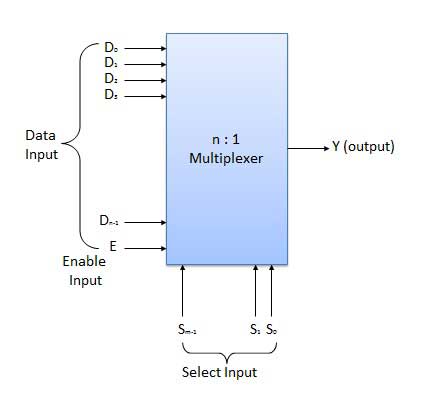
Multiplexers come in multiple variations
- 2 : 1 multiplexer
- 4 : 1 multiplexer
- 16 : 1 multiplexer
- 32 : 1 multiplexer
Block Diagram
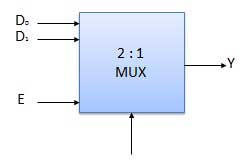
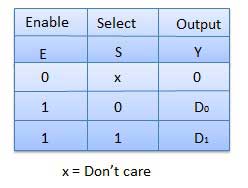
Truth Table
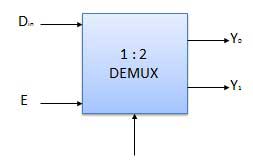
Demultiplexers
A demultiplexer performs the reverse operation of a multiplexer i.e. it receives one input and distributes it over several outputs. It has only one input, n outputs, m select input. At a time only one output line is selected by the select lines and the input is transmitted to the selected output line. A de-multiplexer is equivalent to a single pole multiple way switch as shown in fig.
Demultiplexers comes in multiple variations.
- 1 : 2 demultiplexer
- 1 : 4 demultiplexer
- 1 : 16 demultiplexer
- 1 : 32 demultiplexer
Block diagram
Truth Table
Decoder
A decoder is a combinational circuit. It has n input and to a maximum m = 2n outputs. Decoder is identical to a demultiplexer without any data input. It performs operations which are exactly opposite to those of an encoder.
Block diagram

Examples of Decoders are following.
- Code converters
- BCD to seven segment decoders
- Nixie tube decoders
- Relay actuator
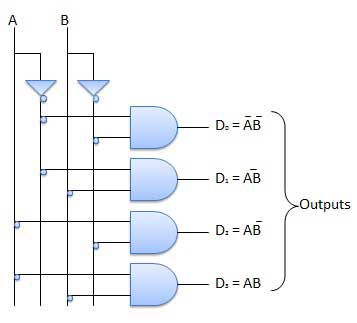
2 to 4 Line Decoder
The block diagram of 2 to 4 line decoder is shown in the fig. A and B are the two inputs where D through D are the four outputs. Truth table explains the operations of a decoder. It shows that each output is 1 for only a specific combination of inputs.
Block diagram

Truth Table

Logic Circuit
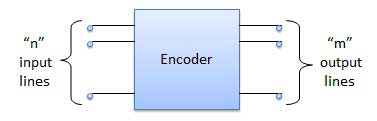
Encoder
Encoder is a combinational circuit which is designed to perform the inverse operation of the decoder. An encoder has n number of input lines and m number of output lines. An encoder produces an m bit binary code corresponding to the digital input number. The encoder accepts an n input digital word and converts it into an m bit another digital word.
Block diagram
Examples of Encoders are following.
- Priority encoders
- Decimal to BCD encoder
- Octal to binary encoder
- Hexadecimal to binary encoder
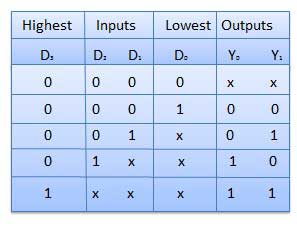
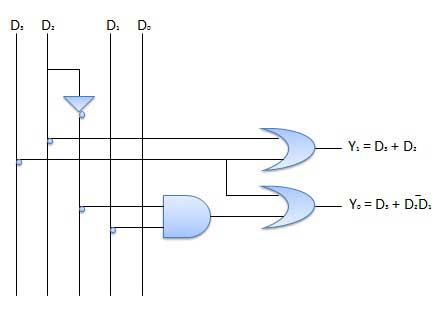
Priority Encoder
This is a special type of encoder. Priority is given to the input lines. If two or more input line are 1 at the same time, then the input line with highest priority will be considered. There are four input D0, D1, D2, D3 and two output Y0, Y1. Out of the four input D3 has the highest priority and D0 has the lowest priority. That means if D3 = 1 then Y1 Y1 = 11 irrespective of the other inputs. Similarly if D3 = 0 and D2 = 1 then Y1 Y0 = 10 irrespective of the other inputs.
Block diagram

Truth Table
Logic Circuit
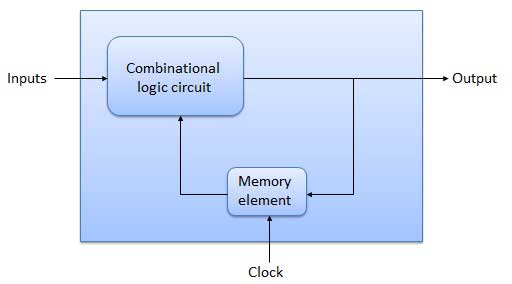
The combinational circuit does not use any memory. Hence the previous state of input does not have any effect on the present state of the circuit. But sequential circuit has memory so output can vary based on input. This type of circuits uses previous input, output, clock and a memory element.
Block diagram
Flip Flop
Flip flop is a sequential circuit which generally samples its inputs and changes its outputs only at particular instants of time and not continuously. Flip flop is said to be edge sensitive or edge triggered rather than being level triggered like latches.
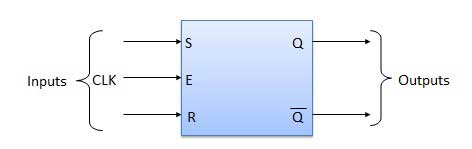
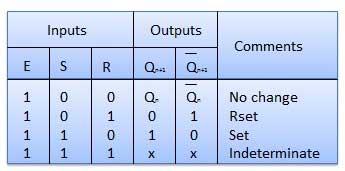
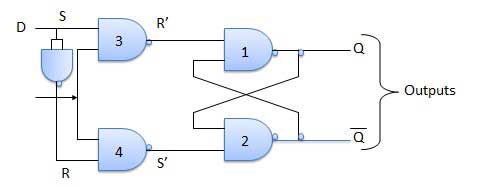
S-R Flip Flop
It is basically S-R latch using NAND gates with an additional enable input. It is also called as level triggered SR-FF. For this, circuit in output will take place if and only if the enable input (E) is made active. In short this circuit will operate as an S-R latch if E = 1 but there is no change in the output if E = 0.
Block Diagram
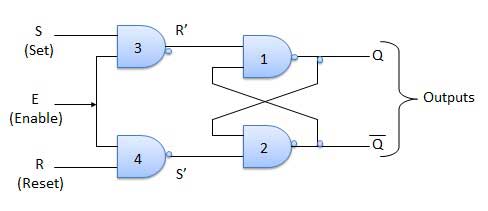
Circuit Diagram
Truth Table
Operation
| S.N. | Condition | Operation |
|---|---|---|
| 1 | S = R = 0 : No change | If S = R = 0 then output of NAND gates 3 and 4 are forced to become 1. Hence R' and S' both will be equal to 1. Since S' and R' are the input of the basic S-R latch using NAND gates, there will be no change in the state of outputs. |
| 2 | S = 0, R = 1, E = 1 | Since S = 0, output of NAND-3 i.e. R' = 1 and E = 1 the output of NAND-4 i.e. S' = 0. Hence Qn+1 = 0 and Qn+1 bar = 1. This is reset condition. |
| 3 | S = 1, R = 0, E = 1 | Output of NAND-3 i.e. R' = 0 and output of NAND-4 i.e. S' = 1. Hence output of S-R NAND latch is Qn+1 = 1 and Qn+1 bar = 0. This is the reset condition. |
| 4 | S = 1, R = 1, E = 1 | As S = 1, R = 1 and E = 1, the output of NAND gates 3 and 4 both are 0 i.e. S' = R' = 0. Hence the Race condition will occur in the basic NAND latch. |
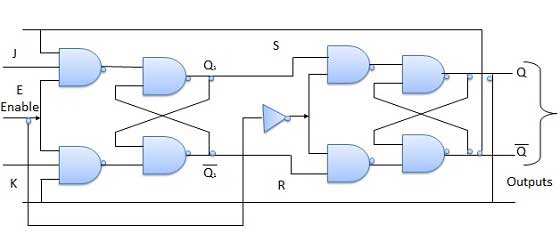
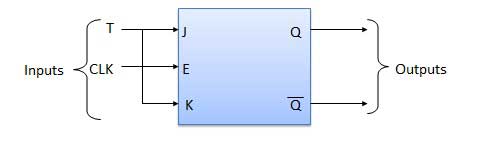
Master Slave JK Flip Flop
Master slave JK FF is a cascade of two S-R FF with feedback from the output of second to input of first. Master is a positive level triggered. But due to the presence of the inverter in the clock line, the slave will respond to the negative level. Hence when the clock = 1 (positive level) the master is active and the slave is inactive. Whereas when clock = 0 (low level) the slave is active and master is inactive.
Circuit Diagram
Truth Table
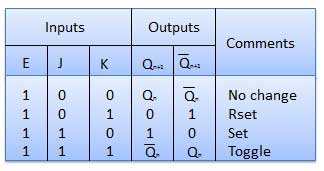
Operation
| S.N. | Condition | Operation |
|---|---|---|
| 1 | J = K = 0 (No change) | When clock = 0, the slave becomes active and master is inactive. But since the S and R inputs have not changed, the slave outputs will also remain unchanged. Therefore outputs will not change if J = K =0. |
| 2 | J = 0 and K = 1 (Reset) | Clock = 1 − Master active, slave inactive. Therefore outputs of the master become Q1 = 0 and Q1 bar = 1. That means S = 0 and R =1. Clock = 0 − Slave active, master inactive. Therefore outputs of the slave become Q = 0 and Q bar = 1. Again clock = 1 − Master active, slave inactive. Therefore even with the changed outputs Q = 0 and Q bar = 1 fed back to master, its output will be Q1 = 0 and Q1 bar = 1. That means S = 0 and R = 1. Hence with clock = 0 and slave becoming active the outputs of slave will remain Q = 0 and Q bar = 1. Thus we get a stable output from the Master slave. |
| 3 | J = 1 and K = 0 (Set) | Clock = 1 − Master active, slave inactive. Therefore outputs of the master become Q1 = 1 and Q1 bar = 0. That means S = 1 and R =0. Clock = 0 − Slave active, master inactive. Therefore outputs of the slave become Q = 1 and Q bar = 0. Again clock = 1 − then it can be shown that the outputs of the slave are stabilized to Q = 1 and Q bar = 0. |
| 4 | J = K = 1 (Toggle) | Clock = 1 − Master active, slave inactive. Outputs of master will toggle. So S and R also will be inverted. Clock = 0 − Slave active, master inactive. Outputs of slave will toggle. These changed output are returned back to the master inputs. But since clock = 0, the master is still inactive. So it does not respond to these changed outputs. This avoids the multiple toggling which leads to the race around condition. The master slave flip flop will avoid the race around condition. |
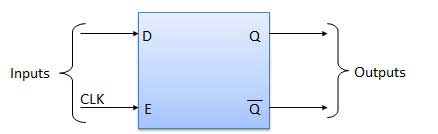
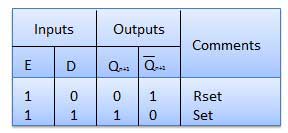
Delay Flip Flop / D Flip Flop
Delay Flip Flop or D Flip Flop is the simple gated S-R latch with a NAND inverter connected between S and R inputs. It has only one input. The input data is appearing at the output after some time. Due to this data delay between i/p and o/p, it is called delay flip flop. S and R will be the complements of each other due to NAND inverter. Hence S = R = 0 or S = R = 1, these input condition will never appear. This problem is avoid by SR = 00 and SR = 1 conditions.
Block Diagram
Circuit Diagram
Truth Table
Operation
| S.N. | Condition | Operation |
|---|---|---|
| 1 | E = 0 | Latch is disabled. Hence no change in output. |
| 2 | E = 1 and D = 0 | If E = 1 and D = 0 then S = 0 and R = 1. Hence irrespective of the present state, the next state is Qn+1 = 0 and Qn+1 bar = 1. This is the reset condition. |
| 3 | E = 1 and D = 1 | If E = 1 and D = 1, then S = 1 and R = 0. This will set the latch and Qn+1 = 1 and Qn+1 bar = 0 irrespective of the present state. |
Toggle Flip Flop / T Flip Flop
Toggle flip flop is basically a JK flip flop with J and K terminals permanently connected together. It has only input denoted by T as shown in the Symbol Diagram. The symbol for positive edge triggered T flip flop is shown in the Block Diagram.
Symbol Diagram
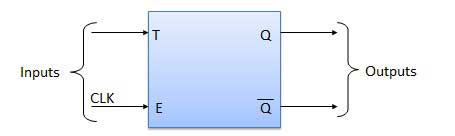
Block Diagram
Truth Table
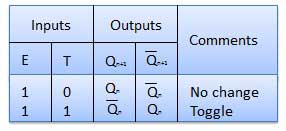
Operation
| S.N. | Condition | Operation |
|---|---|---|
| 1 | T = 0, J = K = 0 | The output Q and Q bar won't change |
| 2 | T = 1, J = K = 1 | Output will toggle corresponding to every leading edge of clock signal. |
Flip-flop is a 1 bit memory cell which can be used for storing the digital data. To increase the storage capacity in terms of number of bits, we have to use a group of flip-flop. Such a group of flip-flop is known as a Register. The n-bit register will consist of n number of flip-flop and it is capable of storing an n-bit word.
The binary data in a register can be moved within the register from one flip-flop to another. The registers that allow such data transfers are called as shift registers. There are four mode of operations of a shift register.
- Serieller Eingang Serieller Ausgang
- Serieller Eingang Paralleler Ausgang
- Paralleler Eingang Serieller Ausgang
- Parallele Eingabe Parallele Ausgabe
Serieller Eingang Serieller Ausgang
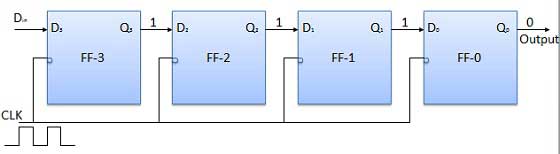
Lassen Sie das gesamte Flip-Flop anfänglich in der Rücksetzbedingung sein, dh Q 3 = Q 2 = Q 1 = Q 0 = 0. Wenn eine Vier-Bit-Binärzahl 1 1 1 1 in das Register eingegeben wird, sollte diese Zahl sein angewendetDinBit, wobei das LSB-Bit zuerst angewendet wird. Der D-Eingang von FF-3, dh D 3, ist mit dem seriellen Dateneingang verbundenDin. Der Ausgang von FF-3, dh Q 3, ist mit dem Eingang des nächsten Flip-Flops verbunden, dh D 2 und so weiter.
Blockdiagramm
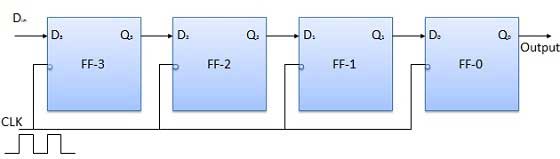
Betrieb
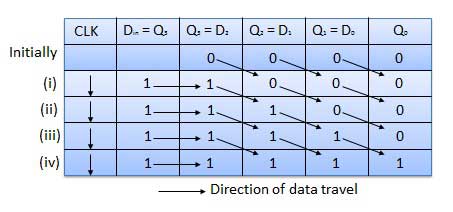
Lassen Sie vor dem Anlegen des Taktsignals Q 3 Q 2 Q 1 Q 0 = 0000 und legen Sie das LSB-Bit der einzugebenden Nummer an D in an . Also D in = D 3 = 1. Wende die Uhr an. Bei der ersten fallenden Taktflanke wird der FF-3 gesetzt und das im Register gespeicherte Wort ist Q 3 Q 2 Q 1 Q 0 = 1000.
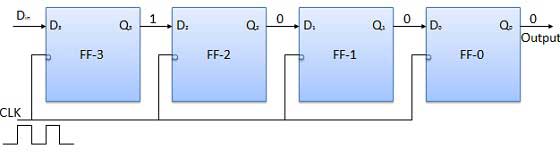
Wenden Sie das nächste Bit auf D in an . Also D in = 1. Sobald die nächste negative Flanke der Uhr trifft, wird FF-2 gesetzt und das gespeicherte Wort ändert sich zu Q 3 Q 2 Q 1 Q 0 = 1100.
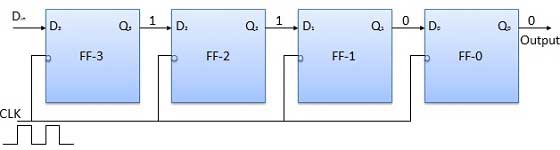
Wenden Sie das nächste zu speichernde Bit an, dh 1 bis D in . Legen Sie den Takt an. Sobald die dritte negative Taktflanke trifft, wird FF-1 gesetzt und der Ausgang auf Q 3 Q 2 Q 1 Q 0 = 1110 geändert .
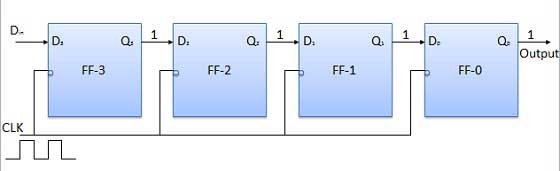
In ähnlicher Weise ist mit D in = 1 und mit dem Eintreffen der vierten negativen Taktflanke das im Register gespeicherte Wort Q 3 Q 2 Q 1 Q 0 = 1111.
Wahrheitstabelle
Wellenformen

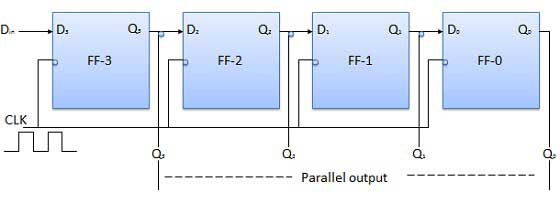
Serieller Eingang Paralleler Ausgang
Bei solchen Operationen werden die Daten seriell eingegeben und parallel herausgenommen.
Daten werden Stück für Stück geladen. Die Ausgänge sind deaktiviert, solange die Daten geladen werden.
Sobald das Laden der Daten abgeschlossen ist, enthalten alle Flip-Flops ihre erforderlichen Daten. Die Ausgänge werden aktiviert, sodass alle geladenen Daten gleichzeitig über alle Ausgangsleitungen verfügbar sind.
Zum Laden eines 4-Bit-Wortes sind 4 Taktzyklen erforderlich. Daher ist die Betriebsgeschwindigkeit des SIPO-Modus dieselbe wie die des SISO-Modus.
Blockdiagramm
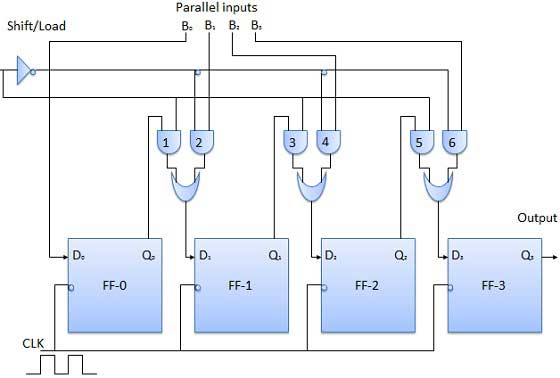
Paralleler Eingang Serieller Ausgang (PISO)
Datenbits werden parallel eingegeben.
Die unten gezeigte Schaltung ist ein serielles 4-Bit-Ausgangsregister mit parallelem Eingang.
Der Ausgang des vorherigen Flip-Flops ist über eine Kombinationsschaltung mit dem Eingang des nächsten verbunden.
Das binäre Eingangswort B 0 , B 1 , B 2 , B 3 wird durch dieselbe Kombinationsschaltung angelegt.
Es gibt zwei Modi, in denen diese Schaltung arbeiten kann, nämlich den Schaltmodus oder den Lademodus.
Lademodus
Wenn die Verschiebungs- / Lastbalkenleitung niedrig ist (0), werden die UND-Gatter 2, 4 und 6 aktiv und leiten die Bits B 1 , B 2 , B 3 an die entsprechenden Flip-Flops weiter. Bei der niedrigen Taktflanke wird der Binäreingang B 0 , B 1 , B 2 , B 3 in die entsprechenden Flip-Flops geladen. Somit findet eine parallele Belastung statt.
Shift-Modus
Wenn die Schalt- / Lastbalkenlinie niedrig ist (1), werden die UND-Gatter 2, 4 und 6 inaktiv. Somit wird das parallele Laden der Daten unmöglich. Aber die UND-Gatter 1,3 und 5 werden aktiv. Daher die Verschiebung von Daten von links nach rechts Bit für Bit bei Anlegen von Taktimpulsen. Somit findet der Parallel-In-Serial-Out-Betrieb statt.
Blockdiagramm
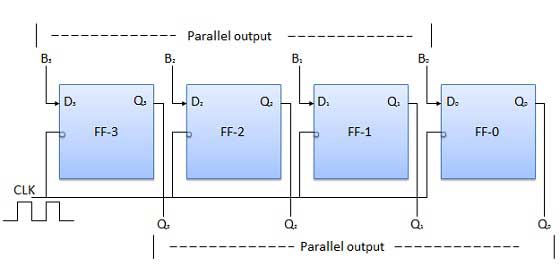
Paralleler Eingang Paralleler Ausgang (PIPO)
In diesem Modus wird der 4-Bit-Binäreingang B 0 , B 1 , B 2 , B 3 an die Dateneingänge D 0 , D 1 , D 2 , D 3 der vier Flip-Flops angelegt. Sobald eine negative Taktflanke angelegt wird, werden die binären Eingangsbits gleichzeitig in die Flip-Flops geladen. Die geladenen Bits erscheinen gleichzeitig auf der Ausgangsseite. Zum Laden aller Bits ist nur ein Taktimpuls erforderlich.
Blockdiagramm
Bidirektionales Schieberegister
Wenn eine Binärzahl um eine Position nach links verschoben wird, entspricht dies dem Multiplizieren der ursprünglichen Zahl mit 2. Wenn eine Binärzahl um eine Position nach rechts verschoben wird, entspricht dies dem Teilen der ursprünglichen Zahl durch 2.
Wenn wir also das Schieberegister verwenden möchten, um die angegebene Binärzahl zu multiplizieren und zu dividieren, sollten wir in der Lage sein, die Daten entweder nach links oder nach rechts zu verschieben.
Ein solches Register wird als bidirektionales Register bezeichnet. Ein bidirektionales 4-Bit-Schieberegister ist in Abb. 1 dargestellt.
Es gibt zwei serielle Eingänge, nämlich den seriellen Rechtsverschiebungsdateneingang DR und den seriellen Linksverschiebungsdateneingang DL zusammen mit einem Modusauswahleingang (M).
Blockdiagramm
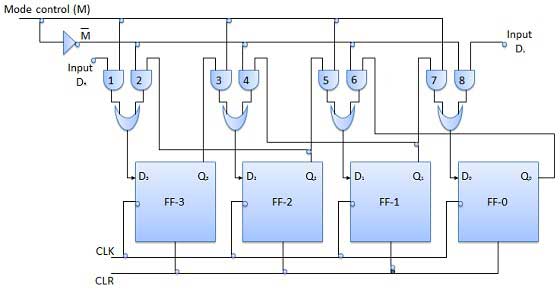
Betrieb
| SN | Bedingung | Betrieb |
|---|---|---|
| 1 | With M = 1 − Shift right operation | Wenn M = 1 ist, sind die UND-Gatter 1, 3, 5 und 7 aktiviert, während die verbleibenden UND-Gatter 2, 4, 6 und 8 deaktiviert sind. Die Daten an D R werden nach rechts bitweise vom FF-3 verschoben FF-0 auf der Anwendung von Taktimpulsen. Somit erhalten wir mit M = 1 die serielle Rechtsverschiebungsoperation. |
| 2 | With M = 0 − Shift left operation | Wenn die Modussteuerung M mit 0 verbunden ist, werden die UND-Gatter 2, 4, 6 und 8 aktiviert, während 1, 3, 5 und 7 deaktiviert sind. Die Daten an D L sind linken bitweise vom FF-FF-0 bis 3 auf der Anwendung von Taktimpulsen verschoben. Somit erhalten wir mit M = 0 die serielle Rechtsverschiebungsoperation. |
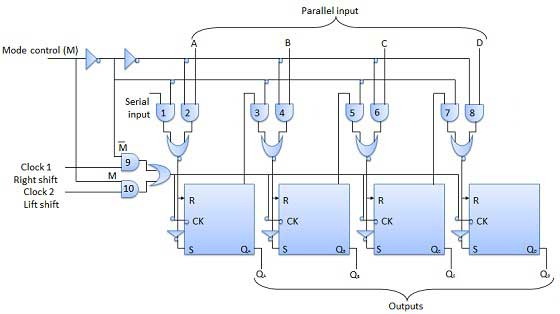
Universelles Schieberegister
Ein Schieberegister, das die Daten nur in eine Richtung verschieben kann, wird als unidirektionales Schieberegister bezeichnet. Ein Schieberegister, das die Daten in beide Richtungen verschieben kann, wird als bidirektionales Schieberegister bezeichnet. Unter Anwendung derselben Logik wird ein Schieberegister, das die Daten in beide Richtungen verschieben und parallel laden kann, als universelles Schieberegister bezeichnet. Das Schieberegister kann die folgende Operation ausführen:
- Paralleles Laden
- Linksverschiebung
- Rechtsverschiebung
Der Modussteuereingang ist für den parallelen Ladevorgang mit logisch 1 verbunden, während er für die serielle Schaltung mit 0 verbunden ist. Wenn der Modussteuerstift mit Masse verbunden ist, wirkt das universelle Schieberegister als bidirektionales Register. Für den seriellen Linksbetrieb wird der Eingang an den seriellen Eingang angelegt, der an das in der Abbildung gezeigte UND-Gatter-1 geht. Während für den Rechtsverschiebungsbetrieb der serielle Eingang an den D-Eingang angelegt wird.
Blockdiagramm
Der Zähler ist eine sequentielle Schaltung. Eine digitale Schaltung, die zum Zählen von Impulsen verwendet wird, ist als Zähler bekannt. Zähler ist die breiteste Anwendung von Flip-Flops. Es ist eine Gruppe von Flip-Flops, an die ein Taktsignal angelegt ist. Es gibt zwei Arten von Zählern.
- Asynchrone oder Welligkeitszähler.
- Synchrone Zähler.
Asynchrone oder Welligkeitszähler
Das Logikdiagramm eines 2-Bit-Ripple-Up-Zählers ist in Abbildung dargestellt. Das Toggle (T) Flip-Flop wird verwendet. Aber wir können das JK - Flip-Flop verwenden auch mit J und K verbunden dauerhaft auf logisch 1. Externer Takt an den Takteingang des Flip-Flops A und Q angelegt wird ein Ausgang angelegt wird an den Takteingang des nächsten Flip-Flop dh FF-B.
Logisches Diagramm
Betrieb
| SN | Bedingung | Betrieb |
|---|---|---|
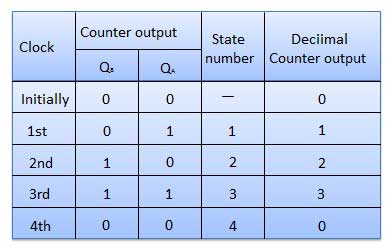
| 1 | Initially let both the FFs be in the reset state | Q B Q A = 00 anfangs |
| 2 | After 1st negative clock edge | Sobald die erste negative Taktflanke angelegt wird, schaltet FF-A um und Q A ist gleich 1. Q A ist mit dem Takteingang von FF-B verbunden. Da sich Q A von 0 auf 1 geändert hat, wird es von FF-B als positive Taktflanke behandelt. Es gibt keine Änderung in Q B, da FF-B ein durch eine negative Flanke ausgelöstes FF ist. Q B Q A = 01 nach dem ersten Takt. |
| 3 | After 2nd negative clock edge | Bei Ankunft der zweiten negativen Taktflanke schaltet FF-A erneut um und Q A = 0. Die Änderung von Q A wirkt als negative Taktflanke für FF-B. Es wird also auch umschalten und Q B wird 1 sein. Q B Q A = 10 nach dem zweiten Takt. |
| 4 | After 3rd negative clock edge | Bei Ankunft der 3. negativen Taktflanke schaltet FF-A erneut um und Q A wird 1 von 0. Da dies eine positive Änderung ist, reagiert FF-B nicht darauf und bleibt inaktiv. Q B ändert sich also nicht und ist weiterhin gleich 1. Q B Q A = 11 nach dem dritten Takt. |
| 5 | After 4th negative clock edge | Bei Ankunft der 4. negativen Taktflanke schaltet FF-A erneut um und Q A wird 1 von 0. Diese negative Änderung von Q A wirkt als Takt für FF-B. Daher wird umgeschaltet, um Q B von 1 auf 0 zu ändern . Q B Q A = 00 nach dem vierten Takt. |
Wahrheitstabelle
Synchrone Zähler
Wenn die "Takt" -Pulse gleichzeitig an alle Flip-Flops in einem Zähler angelegt werden, wird ein solcher Zähler als synchroner Zähler bezeichnet.
2-Bit-Synchron-Up-Zähler
Die J A - und K A -Eingänge von FF-A sind an Logik 1 gebunden. FF-A funktioniert also als Umschalt-Flip-Flop. Die Eingänge J B und K B sind mit Q A verbunden .
Logisches Diagramm

Betrieb
| SN | Bedingung | Betrieb |
|---|---|---|
| 1 | Initially let both the FFs be in the reset state | Q B Q A = 00 anfangs. |
| 2 | After 1st negative clock edge | Sobald die erste negative Taktflanke angelegt wird, schaltet FF-A um und Q A ändert sich von 0 auf 1. Zum Zeitpunkt des Anlegens einer negativen Taktflanke ist Q A , J B = K B = 0. Daher ändert FF-B seinen Zustand nicht. Q B bleibt also 0. Q B Q A = 01 nach dem ersten Takt. |
| 3 | After 2nd negative clock edge | Bei Eintreffen der zweiten negativen Taktflanke schaltet FF-A erneut um und Q A wechselt von 1 auf 0. Aber zu diesem Zeitpunkt war Q A 1. Also ist J B = K B = 1 und FF-B schaltet um. Daher ändert sich Q B von 0 auf 1. Q B Q A = 10 nach dem zweiten Takt. |
| 4 | After 3rd negative clock edge | Bei Anwendung der dritten fallenden Taktflanke wechselt FF-A von 0 auf 1, es gibt jedoch keine Zustandsänderung für FF-B. Q B Q A = 11 nach dem dritten Takt. |
| 5 | After 4th negative clock edge | Bei Anlegen des nächsten Taktimpulses ändert sich Q A von 1 auf 0, da sich Q B ebenfalls von 1 auf 0 ändert. Q B Q A = 00 nach dem vierten Takt. |
Klassifizierung von Zählern
Abhängig von der Art und Weise, in der die Zählung fortschreitet, werden die synchronen oder asynchronen Zähler wie folgt klassifiziert:
- Zähler hoch
- Abwärtszähler
- Auf / Ab-Zähler
UP / DOWN-Zähler
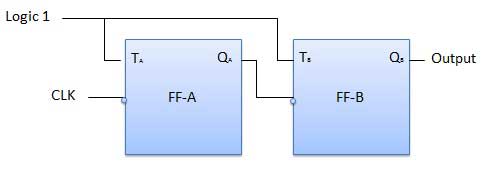
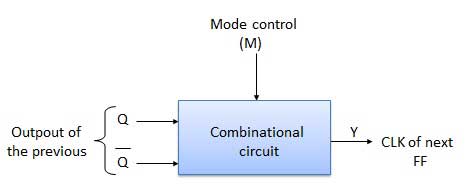
Der Aufwärtszähler und der Abwärtszähler werden miteinander kombiniert, um einen Aufwärts- / Abwärtszähler zu erhalten. Ein Modussteuereingang (M) dient ebenfalls zur Auswahl des Aufwärts- oder Abwärtsmodus. Zwischen jedem Flip-Flop-Paar muss eine Kombinationsschaltung entworfen und verwendet werden, um den Auf- / Ab-Betrieb zu erreichen.
- Art der Auf- / Ab-Zähler
- Welligkeitszähler nach OBEN / UNTEN
- Synchronzähler UP / DOWN
Welligkeitszähler nach oben / unten
Im UP / DOWN-Ripple-Zähler arbeiten alle FFs im Umschaltmodus. Es sind also entweder T-Flip-Flops oder JK-Flip-Flops zu verwenden. Das LSB-Flipflop empfängt den Takt direkt. Der Takt zu jedem anderen FF wird jedoch aus der Ausgabe (Q = Q bar) des vorherigen FF erhalten.
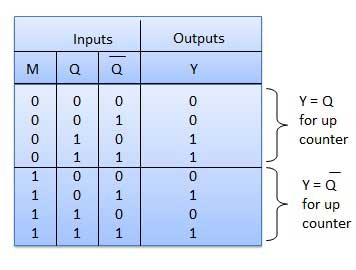
UP counting mode (M=0)- Der Q-Ausgang des vorhergehenden FF ist mit dem Takt der nächsten Stufe verbunden, wenn eine Aufwärtszählung erreicht werden soll. Für diesen Modus liegt der Modusauswahleingang M auf logisch 0 (M = 0).
DOWN counting mode (M=1)- Wenn M = 1 ist, wird der Q-Bar-Ausgang des vorhergehenden FF mit dem nächsten FF verbunden. Dadurch wird der Zähler im Zählmodus betrieben.
Beispiel
3-Bit-Binär-Auf / Ab-Welligkeitszähler.
3-Bit - daher sind drei FFs erforderlich.
UP / DOWN - Ein Modussteuereingang ist daher unerlässlich.
Bei einem Ripple-Up-Zähler ist der Q-Ausgang des vorhergehenden FF mit dem Takteingang des nächsten verbunden.
Bei einem Ripple-Up-Zähler ist der Q-Ausgang des vorhergehenden FF mit dem Takteingang des nächsten verbunden.
Bei einem Ripple-Down-Zähler ist der Q-Bar-Ausgang des vorhergehenden FF mit dem Takteingang des nächsten verbunden.
Die Auswahl des Q- und Q-Balkenausgangs des vorhergehenden FF werde durch den Modussteuereingang M so gesteuert, dass, wenn M = 0, UP zählt. Verbinden Sie also Q mit CLK. Wenn M = 1, zählt DOWN. Verbinden Sie also die Q-Leiste mit CLK.
Blockdiagramm
Wahrheitstabelle
Betrieb
| SN | Bedingung | Betrieb |
|---|---|---|
| 1 | Case 1 − With M = 0 (Up counting mode) | Wenn M = 0 und M bar = 1, dann sind die UND-Gatter 1 und 3 in Abb. wird aktiviert, während die UND-Gatter 2 und 4 deaktiviert werden. Daher wird Q A mit dem Takteingang von FF-B verbunden und Q B wird mit dem Takteingang von FF-C verbunden. Diese Verbindungen sind die gleichen wie für den normalen Aufwärtszähler. Somit arbeitet die Schaltung mit M = 0 als Aufwärtszähler. |
| 2 | Case 2: With M = 1 (Down counting mode) | Wenn M = 1, dann sind die UND-Gatter 2 und 4 in Abb. sind aktiviert, während die UND-Gatter 1 und 3 deaktiviert sind. Daher Q A wird bar mit dem Takteingang verbunden FF-B und Q B bar an den Takteingang des FF-C verbunden wird. Diese Verbindungen erzeugen einen Abwärtszähler. Somit arbeitet die Schaltung mit M = 1 als Abwärtszähler. |
Modulzähler (MOD-N-Zähler)
Der 2-Bit-Ripple-Zähler wird als MOD-4-Zähler und der 3-Bit-Ripple-Zähler als MOD-8-Zähler bezeichnet. Im Allgemeinen wird ein n-Bit-Welligkeitszähler als Modulo-N-Zähler bezeichnet. Wobei MOD-Nummer = 2 n .
Art des Moduls
- 2-Bit nach oben oder unten (MOD-4)
- 3-Bit nach oben oder unten (MOD-8)
- 4-Bit nach oben oder unten (MOD-16)
Anwendung von Zählern
- Frequenzzähler
- Digitaluhr
- Zeitmessung
- A / D-Wandler
- Frequenzteilerschaltungen
- Digitaler Dreieckwellengenerator.
Eine Erinnerung ist wie ein menschliches Gehirn. Es wird zum Speichern von Daten und Anweisungen verwendet. Computerspeicher ist der Speicherplatz im Computer, in dem Daten verarbeitet und Anweisungen verarbeitet werden sollen, die für die Verarbeitung erforderlich sind.
Der Speicher ist in eine große Anzahl kleiner Teile unterteilt. Jeder Teil wird als Zelle bezeichnet. Jeder Ort oder jede Zelle hat eine eindeutige Adresse, die von null bis zur Speichergröße minus eins variiert.
Wenn der Computer beispielsweise 64.000 Wörter enthält, verfügt diese Speichereinheit über 64 * 1024 = 65536 Speicherplatz. Die Adresse dieser Standorte variiert zwischen 0 und 65535.
Es gibt hauptsächlich zwei Arten von Speicher
Internal Memory - Cache-Speicher und Primär- / Hauptspeicher
External Memory - Magnetplatte / optische Platte usw.
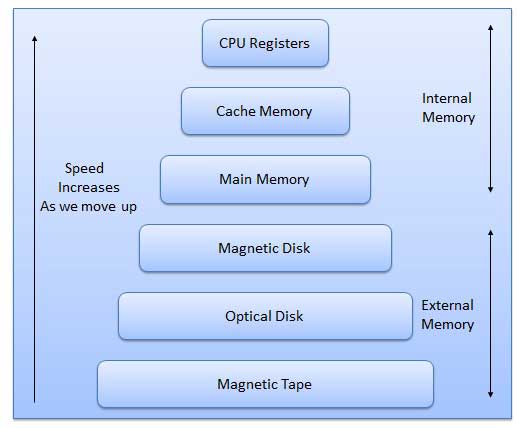
Die Merkmale der Speicherhierarchie folgen, wenn wir von oben nach unten gehen.
- Die Speicherkapazität steigt.
- Die Kosten pro Speicherbit sinken.
- Die Häufigkeit des Zugriffs der CPU auf den Speicher nimmt ab.
- Die Zugriffszeit der CPU erhöht sich.
RAM
Ein RAM bildet den internen Speicher der CPU zum Speichern von Daten, Programm und Programmergebnis. Es ist Lese- / Schreibspeicher. Es wird als Direktzugriffsspeicher (RAM) bezeichnet.
Da die Zugriffszeit im RAM unabhängig von der Adresse des Wortes ist, ist jeder Speicherort im Speicher genauso leicht zu erreichen wie jeder andere Speicherort und benötigt dieselbe Zeit. Wir können zufällig und extrem schnell in den Speicher greifen, können aber auch ziemlich teuer sein.
RAM ist flüchtig, dh die darin gespeicherten Daten gehen verloren, wenn wir den Computer ausschalten oder wenn ein Stromausfall vorliegt. Daher wird bei Computern häufig ein unterbrechungsfreies Backup-Stromversorgungssystem (USV) verwendet. Der Arbeitsspeicher ist klein, sowohl hinsichtlich seiner physischen Größe als auch hinsichtlich der Datenmenge, die er aufnehmen kann.
Es gibt zwei Arten von RAM
- Statischer RAM (SRAM)
- Dynamischer RAM (DRAM)
Statischer RAM (SRAM)
Das Wort staticzeigt an, dass der Speicher seinen Inhalt behält, solange die Stromversorgung eingeschaltet bleibt. Daten gehen jedoch verloren, wenn der Strom aufgrund der Flüchtigkeit ausfällt. SRAM-Chips verwenden eine Matrix aus 6 Transistoren und keine Kondensatoren. Transistoren benötigen keine Stromversorgung, um Leckagen zu vermeiden, sodass der SRAM nicht regelmäßig aktualisiert werden muss.
Aufgrund des zusätzlichen Speicherplatzes in der Matrix verwendet der SRAM mehr Chips als der DRAM bei gleichem Speicherplatz, wodurch die Herstellungskosten höher werden.
Statischer RAM wird verwendet, da der Cache-Speicher sehr schnell und klein sein muss.
Dynamischer RAM (DRAM)
DRAM muss im Gegensatz zu SRAM kontinuierlich sein refresheddamit es die Daten pflegt. Dies erfolgt durch Platzieren des Speichers in einer Auffrischungsschaltung, die die Daten mehrere hundert Mal pro Sekunde neu schreibt. DRAM wird für die meisten Systemspeicher verwendet, da es billig und klein ist. Alle DRAMs bestehen aus Speicherzellen. Diese Zellen bestehen aus einem Kondensator und einem Transistor.
Rom
ROM steht für Read Only Memory. Der Speicher, aus dem wir nur lesen, aber nicht schreiben können. Diese Art von Speicher ist nicht flüchtig. Die Informationen werden während der Herstellung dauerhaft in solchen Speichern gespeichert.
In einem ROM werden Anweisungen gespeichert, die zum Starten des Computers beim ersten Einschalten des Stroms erforderlich sind. Dieser Vorgang wird als Bootstrap bezeichnet. ROM-Chips werden nicht nur im Computer verwendet, sondern auch in anderen elektronischen Geräten wie Waschmaschine und Mikrowelle.
Es folgen die verschiedenen ROM-Typen -
MROM (Masked ROM)
Die allerersten ROMs waren fest verdrahtete Geräte, die einen vorprogrammierten Satz von Daten oder Anweisungen enthielten. Diese Art von ROMs werden als maskierte ROMs bezeichnet. Es ist preiswertes ROM.
PROM (Programmierbarer Nur-Lese-Speicher)
PROM ist ein Nur-Lese-Speicher, der von einem Benutzer nur einmal geändert werden kann. Der Benutzer kauft ein leeres PROM und gibt den gewünschten Inhalt mit einem PROM-Programmierer ein. Im PROM-Chip befinden sich kleine Sicherungen, die während der Programmierung durchgebrannt sind. Es kann nur einmal programmiert werden und ist nicht löschbar.
EPROM (löschbarer und programmierbarer Nur-Lese-Speicher)
Das EPROM kann gelöscht werden, indem es für eine Dauer von bis zu 40 Minuten ultraviolettem Licht ausgesetzt wird. Normalerweise erreicht ein EPROM-Radierer diese Funktion. Während der Programmierung wird eine elektrische Ladung in einem isolierten Gate-Bereich eingeschlossen. Die Ladung bleibt länger als zehn Jahre erhalten, da die Ladung keinen Leckpfad aufweist. Zum Löschen dieser Ladung wird ultraviolettes Licht durch ein Quarzkristallfenster (Deckel) geleitet. Diese Belichtung mit ultraviolettem Licht leitet die Ladung ab. Während des normalen Gebrauchs wird der Quarzdeckel mit einem Aufkleber verschlossen.
EEPROM (elektrisch löschbarer und programmierbarer Nur-Lese-Speicher)
Das EEPROM wird elektrisch programmiert und gelöscht. Es kann ungefähr zehntausend Mal gelöscht und neu programmiert werden. Sowohl das Löschen als auch das Programmieren dauern etwa 4 bis 10 ms (Millisekunde). Im EEPROM kann jeder Ort selektiv gelöscht und programmiert werden. EEPROMs können byteweise gelöscht werden, anstatt den gesamten Chip zu löschen. Daher ist der Prozess der Neuprogrammierung flexibel, aber langsam.
Serieller Zugriffsspeicher
Sequentieller Zugriff bedeutet, dass das System das Speichergerät vom Anfang der Speicheradresse durchsuchen muss, bis es die erforderlichen Daten gefunden hat. Ein Speichergerät, das einen solchen Zugriff unterstützt, wird als sequentieller Zugriffsspeicher oder serieller Zugriffsspeicher bezeichnet. Magnetband ist ein Beispiel für einen seriellen Zugriffsspeicher.
Direktzugriffsspeicher
Direktzugriffsspeicher oder Direktzugriffsspeicher bezieht sich auf Bedingungen, unter denen ein System direkt zu den vom Benutzer gewünschten Informationen wechseln kann. Ein Speichergerät, das einen solchen Zugriff unterstützt, wird als Direktzugriffsspeicher bezeichnet. Magnetplatten, optische Platten sind Beispiele für Direktzugriffsspeicher.
Cache-Speicher
Der Cache-Speicher ist ein Halbleiterspeicher mit sehr hoher Geschwindigkeit, der die CPU beschleunigen kann. Es fungiert als Puffer zwischen der CPU und dem Hauptspeicher. Es wird verwendet, um die Teile von Daten und Programmen zu speichern, die am häufigsten von der CPU verwendet werden. Die Teile von Daten und Programmen werden vom Betriebssystem von der Festplatte in den Cache-Speicher übertragen, von wo aus die CPU darauf zugreifen kann.
Vorteile
- Der Cache-Speicher ist schneller als der Hauptspeicher.
- Es verbraucht weniger Zugriffszeit als der Hauptspeicher.
- Es speichert das Programm, das innerhalb kurzer Zeit ausgeführt werden kann.
- Es speichert Daten zur vorübergehenden Verwendung.
Nachteile
- Der Cache-Speicher hat eine begrenzte Kapazität.
- Es ist sehr teuer.
Der virtuelle Speicher ist eine Technik, mit der Prozesse ausgeführt werden können, die im Speicher nicht vollständig verfügbar sind. Der sichtbare Hauptvorteil dieses Schemas besteht darin, dass Programme größer als der physische Speicher sein können. Virtueller Speicher ist die Trennung des logischen Benutzerspeichers vom physischen Speicher.
Diese Trennung ermöglicht es Programmierern, einen extrem großen virtuellen Speicher bereitzustellen, wenn nur ein kleinerer physischer Speicher verfügbar ist. Es folgen die Situationen, in denen nicht das gesamte Programm vollständig in den Hauptspeicher geladen werden muss.
Vom Benutzer geschriebene Fehlerbehandlungsroutinen werden nur verwendet, wenn ein Fehler in den Daten oder in der Berechnung aufgetreten ist.
Bestimmte Optionen und Funktionen eines Programms werden möglicherweise nur selten verwendet.
Vielen Tabellen wird ein fester Adressraum zugewiesen, obwohl nur ein kleiner Teil der Tabelle tatsächlich verwendet wird.
Die Fähigkeit, ein Programm auszuführen, das sich nur teilweise im Speicher befindet, würde vielen Vorteilen entgegenwirken.
Zum Laden oder Austauschen jedes Benutzerprogramms in den Speicher wäre weniger E / A erforderlich.
Ein Programm würde nicht länger durch die Menge des verfügbaren physischen Speichers eingeschränkt.
Jedes Benutzerprogramm könnte weniger physischen Speicher beanspruchen, mehr Programme könnten gleichzeitig ausgeführt werden, mit einer entsprechenden Erhöhung der CPU-Auslastung und des Durchsatzes.
Hilfsspeicher
Der Zusatzspeicher ist viel größer als der Hauptspeicher, aber langsamer. Normalerweise werden Systemprogramme, Anweisungen und Datendateien gespeichert. Es ist auch als Sekundärspeicher bekannt. Es kann auch als Überlauf- / virtueller Speicher verwendet werden, wenn die Hauptspeicherkapazität überschritten wurde. Auf sekundäre Speicher kann ein Prozessor nicht direkt zugreifen. Zuerst werden die Daten / Informationen des Hilfsspeichers in den Hauptspeicher übertragen, und dann kann die CPU auf diese Informationen zugreifen. Eigenschaften des Hilfsspeichers sind folgende -
Non-volatile memory - Bei Stromausfall gehen keine Daten verloren.
Reusable - Die Daten bleiben dauerhaft im Sekundärspeicher, bis sie vom Benutzer nicht überschrieben oder gelöscht werden.
Reliable - Daten im Sekundärspeicher sind aufgrund der hohen physischen Stabilität des Sekundärspeichers sicher.
Convenience - Mit Hilfe einer Computersoftware können autorisierte Personen die Daten schnell finden und darauf zugreifen.
Capacity - Der Sekundärspeicher kann große Datenmengen in Sätzen mehrerer Festplatten speichern.
Cost - Das Speichern von Daten auf einem Band oder einer Festplatte ist wesentlich kostengünstiger als der primäre Speicher.
Die Mikroprozessoreinheit ist ein Synonym für die Zentraleinheit, die CPU, die in herkömmlichen Computern verwendet wird. Der Mikroprozessor (MPU) fungiert als Gerät oder als Gruppe von Geräten, die die folgenden Aufgaben ausführen.
- mit Peripheriegeräten kommunizieren
- Timing-Signal bereitstellen
- direkter Datenfluss
- Führen Sie Computeraufgaben gemäß den Anweisungen im Speicher aus
8085 Mikroprozessor
Der 8085-Mikroprozessor ist ein 8-Bit-Allzweck-Mikroprozessor, der 64 KB Speicher adressieren kann. Dieser Prozessor hat vierzig Pins, benötigt eine +5 V-Einzelstromversorgung und einen 3-MHz-Einphasentakt.
Blockdiagramm
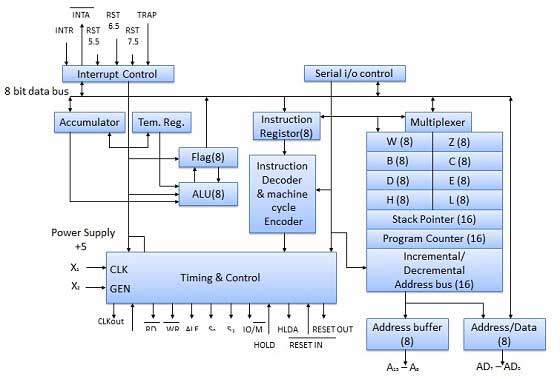
ALU
Die ALU führt die Rechenfunktion des Mikroprozessors aus. Es enthält den Akkumulator, das temporäre Register, die Arithmetik- und Logikschaltung & und fünf Flags. Das Ergebnis wird in Akkumulator & Flags gespeichert.
Blockdiagramm

Akkumulator
Es ist ein 8-Bit-Register, das Teil der ALU ist. Dieses Register wird zum Speichern von 8-Bit-Daten und zum Ausführen von arithmetischen und logischen Operationen verwendet. Das Betriebsergebnis wird im Akkumulator gespeichert.
Diagramm
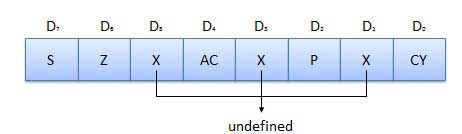
Flaggen
Flags sind programmierbar. Sie können verwendet werden, um die Daten unter Verwendung von Anweisungen aus den Registern zu speichern und zu übertragen. Die ALU enthält fünf Flip-Flops, die gemäß der Datenbedingung im Akkumulator und anderen Registern gesetzt und zurückgesetzt werden.
S (Sign) flag- Wenn nach der Ausführung einer arithmetischen Operation Bit D 7 des Ergebnisses 1 ist, wird das Vorzeichenflag gesetzt. Es wird zur signierten Nummer verwendet. Wenn in einem gegebenen Byte D 7 1 ist, bedeutet dies eine negative Zahl. Wenn es Null ist, bedeutet dies, dass es eine positive Zahl ist.
Z (Zero) flag - Das Null-Flag wird gesetzt, wenn das ALU-Operationsergebnis 0 ist.
AC (Auxiliary Carry) flag- Im arithmetischen Betrieb wird das AC-Flag gesetzt , wenn der Übertrag durch die Ziffer D3 erzeugt und an die Ziffer D 4 weitergeleitet wird. Dieses Flag wird nur intern für den BCD-Betrieb verwendet.
P (Parity) flag- Wenn das Ergebnis nach einer arithmetischen oder logischen Operation eine gerade Zahl von 1s hat, wird das Flag gesetzt. Wenn es eine ungerade Anzahl von 1s hat, wird das Flag zurückgesetzt.
C (Carry) flag - Wenn das Ergebnis der arithmetischen Operation ein Übertrag ist, wird das Übertragsflag gesetzt, andernfalls wird es zurückgesetzt.
Abschnitt registrieren
Es ist im Grunde ein Speichergerät und überträgt Daten aus Registern unter Verwendung von Anweisungen.
Stack Pointer (SP)- Der Stapelzeiger ist auch ein 16-Bit-Register, das als Speicherzeiger verwendet wird. Es zeigt auf einen Speicherplatz im Lese- / Schreibspeicher, der als Stapel bezeichnet wird. Zwischen der Ausführung des Programms werden manchmal Daten im Stapel gespeichert. Der Anfang des Stapels wird durch Laden einer 16-Bit-Adresse in den Stapelzeiger definiert.
Program Counter (PC)- Dieses 16-Bit-Register behandelt die vierte Operation, um die Ausführung des Befehls zu sequenzieren. Dieses Register ist auch ein Speicherzeiger. Der Speicherort hat eine 16-Bit-Adresse. Es wird zum Speichern der Ausführungsadresse verwendet. Die Funktion des Programmzählers besteht darin, auf die Speicheradresse zu zeigen, von der das nächste Byte abgerufen werden soll.
Storage registers- Diese Register speichern 8-Bit-Daten während einer Programmausführung. Diese Register werden als B, C, D, E, H, L identifiziert. Sie können als Registerpaar BC, DE und HL kombiniert werden, um einige 16-Bit-Operationen auszuführen.
Zeit- und Kontrollabschnitt
Dieses Gerät ist dafür verantwortlich, den Mikroprozessorbetrieb gemäß dem Taktimpuls zu synchronisieren und die Steuersignale zu erzeugen, die für eine reibungslose Kommunikation zwischen Mikroprozessor und Peripheriegeräten erforderlich sind. Die RD-Balken- und WR-Balkensignale sind synchrone Impulse, die anzeigen, ob Daten auf dem Datenbus verfügbar sind oder nicht. Die Steuereinheit ist dafür verantwortlich, den Datenfluss zwischen Mikroprozessor, Speicher und Peripheriegeräten zu steuern.
PIN-Diagramm
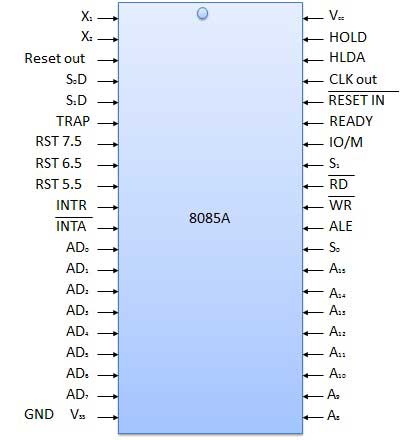
Das gesamte Signal kann in sechs Gruppen eingeteilt werden
| SN | Gruppe | Beschreibung |
|---|---|---|
| 1 | Address bus | Der 8085-Mikroprozessor verfügt über eine 8-Signalleitung A 15 - A 8, die unidirektional sind und als Adressbus hoher Ordnung verwendet werden. |
| 2 | Data bus | Die Signalleitungen AD7 - AD0 sind für zwei Zwecke bidirektional. Sie werden sowohl als Adressbus niedriger Ordnung als auch als Datenbus verwendet. |
| 3 | Control signal and Status signal | Steuersignal RD bar- Es handelt sich um ein Lesesteuersignal (aktiv niedrig). Wenn es aktiv ist, liest der Speicher die Daten. WR bar- Es ist ein Schreibsteuersignal (aktiv niedrig). Es ist aktiv, wenn es in den ausgewählten Speicher geschrieben wird. Statussignal ALU (Address Latch Enable)- Wenn ALU hoch ist. 8085 Mikroprozessor verwenden Adressbus. Wenn ALU niedrig ist. 8085 Mikroprozessor verwendet Datenbus. IO/M bar- Dies ist ein Statussignal, mit dem zwischen E / A- und Speicheroperationen unterschieden wird. Wenn es hoch ist, zeigt es eine E / A-Operation an, und wenn es niedrig ist, zeigt es eine Speicheroperation an. S1 and S0 - Diese Statussignale, ähnlich wie E / A und Speicherleiste, können verschiedene Vorgänge identifizieren, werden jedoch in kleinen Systemen selten verwendet. |
| 4 | Power supply and frequency signal | Vcc - + 5V Stromversorgung. Vss - Bodenreferenz. X, X- An diesen beiden Stiften ist ein Kristall angeschlossen. Die Frequenz wird intern durch zwei Betriebssysteme bei 3 MHz geteilt, der Kristall sollte eine Frequenz von 6 MHz haben. CLK out - Dieses Signal kann als Systemuhr für andere Geräte verwendet werden. |
| 5 | Externally initiated signal | INTR (i/p) - Anfrage unterbrechen. INTA bar (o/p) - Es wird als Bestätigungsinterrupt verwendet. TRAP (i/p) - Dies ist ein nicht maskierbarer Interrupt und hat höchste Priorität. HOLD (i/p) - Es wird verwendet, um das ausführende Programm zu halten. HLDA (o/p) - Bestätigen Sie gedrückt. READY (i/p) - Dieses Signal wird verwendet, um den Lese- oder Schreibzyklus des Mikroprozessors zu verzögern, bis ein langsam reagierendes Peripheriegerät bereit ist, Daten zu akzeptieren oder zu senden. RESET IN bar - Wenn das Signal an diesem Pin niedrig wird, wird der Programmzähler auf Null gesetzt, der Bus wird dreifach angegeben und die MPU wird zurückgesetzt. RESET OUT- Dieses Signal zeigt an, dass die MPU zurückgesetzt wird. Das Signal kann zum Zurücksetzen anderer Geräte verwendet werden. RST 7.5, RST 6.5, RST 5.5 (Request interrupt)- Es wird verwendet, um die Programmsteuerung an einen bestimmten Speicherort zu übertragen. Sie haben eine höhere Priorität als der INTR-Interrupt. |
| 6 | Serial I/O ports | Der 8085-Mikroprozessor verfügt über zwei Signale zum Implementieren der seriellen Eingangsdaten für die serielle Übertragung und der seriellen Ausgangsdaten. |
Anweisungsformat
Jeder Befehl wird durch eine Folge von Bits innerhalb des Computers dargestellt. Der Befehl ist in eine Gruppe von Bits unterteilt, die als Feld bezeichnet werden. Die Art und Weise, wie Anweisungen ausgedrückt werden, wird als Anweisungsformat bezeichnet. Es wird normalerweise in Form eines rechteckigen Kastens dargestellt. Das Anweisungsformat kann von den folgenden Typen sein.
Variable Anweisungsformate
Dies sind die Befehlsformate, in denen die Befehlslänge auf der Grundlage von Opcode- und Adressspezifizierern variiert. Beispielsweise variiert der VAX-Befehl zwischen 1 und 53 Byte, während der X86-Befehl zwischen 1 und 17 Byte variiert.
Format

Vorteil
Diese Formate haben eine gute Codedichte.
Nachteil
Diese Befehlsformate sind sehr schwer zu dekodieren und zu routen.
Feste Anweisungsformate
In dieser Art von Anweisungsformat sind alle Anweisungen gleich groß. Zum Beispiel MIPS, Power PC, Alpha, ARM.
Format

Vorteil
Sie sind einfach zu dekodieren und zu leiten.
Nachteil
Sie haben keine gute Codedichte.
Hybride Anweisungsformate
Bei dieser Art von Anweisungsformaten haben wir mehrere Formatlängen, die durch den Opcode angegeben werden. Zum Beispiel IBM 360/70, MIPS 16, Thumb.
Format

Vorteil
Diese Kompromisse zwischen Codedichte und Anweisungen dieses Typs sind sehr einfach zu dekodieren.
Adressierungsmodi
Der Adressierungsmodus bietet verschiedene Möglichkeiten für den Zugriff auf eine Adresse für bestimmte Daten an einen Prozessor. Betriebsdaten werden im Speicherort gespeichert, wobei jeder Befehl bestimmte Daten erfordert, mit denen er arbeiten muss. Es gibt verschiedene Techniken, um die Adresse von Daten anzugeben. Diese Techniken werden als Adressierungsmodi bezeichnet.
Direct addressing mode- Im direkten Adressierungsmodus wird die Adresse des Operanden in der Anweisung angegeben, und Daten sind an dem Speicherort verfügbar, der in der Anweisung angegeben ist. Wir werden diese Daten an den gewünschten Ort verschieben.
Indirect addressing mode- Im indirekten Adressierungsmodus gibt der Befehl ein Register an, das die Adresse des Operanden enthält. Auf den internen RAM und den externen RAM kann über den indirekten Adressierungsmodus zugegriffen werden.
Immediate addressing mode- Im Sofortadressierungsmodus werden im Operanden direkte Daten angegeben, die die Daten im Akkumulator verschieben. Es ist sehr schnell.
Relative addressing mode- Im relativen Adressmodus wird die effektive Adresse durch den Indexmodus bestimmt, indem der Programmzähler anstelle des Allzweckprozessorregisters verwendet wird. Dieser Modus wird als relativer Adressmodus bezeichnet.
Index addressing mode- Im Indexadressenmodus wird die effektive Adresse des Operanden durch Hinzufügen eines Inhaltswerts zum Inhalt des Registers generiert. Dieser Modus wird als Indexadressmodus bezeichnet.