Propriedades de Z-Transforms
Z-Transform tem as seguintes propriedades:
Propriedade de Linearidade
Se $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
e $ \, y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} Y (Z) $
Então a propriedade de linearidade afirma que
$ a \, x (n) + b \, y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} a \, X (Z) + b \, Y (Z) $
Propriedade Time Shifting
Se $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
Então a propriedade Time shifting afirma que
$ x (nm) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} z ^ {- m} X (Z) $
Propriedade de multiplicação por sequência exponencial
Se $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
Então, a multiplicação por uma propriedade de sequência exponencial afirma que
$ a ^ n \,. x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z / a) $
Propriedade de reversão do tempo
Se $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
Então, a propriedade de reversão do tempo afirma que
$ x (-n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (1 / Z) $
Diferenciação no domínio Z OU multiplicação pela propriedade n
Se $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
Então a multiplicação por n ou diferenciação na propriedade do domínio z afirma que
$ n ^ kx (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} [-1] ^ kz ^ k {d ^ k X (Z) \ sobre dZ ^ K} $
Propriedade de convolução
Se $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
e $ \, y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} Y (Z) $
Então a propriedade de convolução afirma que
$ x (n) * y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) .Y (Z) $
Propriedade de Correlação
Se $ \, x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) $
e $ \, y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} Y (Z) $
Então, a propriedade de correlação afirma que
$ x (n) \ otimes y (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z) .Y (Z ^ {- 1}) $
Teoremas do valor inicial e do valor final
Os teoremas do valor inicial e do valor final da transformada z são definidos para o sinal causal.
Teorema do valor inicial
Para um sinal causal x (n), o teorema do valor inicial afirma que
$ x (0) = \ lim_ {z \ to \ infty} X (z) $
Isso é usado para encontrar o valor inicial do sinal sem tomar a transformada z inversa
Teorema do valor final
Para um sinal causal x (n), o teorema do valor final afirma que
$ x (\ infty) = \ lim_ {z \ to 1} [z-1] X (z) $
Isso é usado para encontrar o valor final do sinal sem fazer a transformada z inversa.
Região de Convergência (ROC) da Transformada Z
A faixa de variação de z para a qual converge a transformada z é chamada de região de convergência da transformada z.
Propriedades de ROC de Z-Transforms
ROC da transformada z é indicada com um círculo no plano z.
ROC não contém nenhum pólo.
Se x (n) é uma sequência causal de duração finita ou sequência do lado direito, então o ROC é todo o plano z exceto em z = 0.
Se x (n) é uma sequência anti-causal de duração finita ou sequência do lado esquerdo, então o ROC é todo o plano z exceto em z = ∞.
Se x (n) é uma sequência causal de duração infinita, ROC é exterior ao círculo com raio aie | z | > a.
Se x (n) é uma sequência anti-causal de duração infinita, ROC é o interior do círculo com raio aie | z | <a.
Se x (n) é uma sequência de dois lados de duração finita, então o ROC é todo o plano z exceto em z = 0 & z = ∞.
O conceito de ROC pode ser explicado pelo seguinte exemplo:
Example 1: Encontre a transformada z e ROC de $ a ^ nu [n] + a ^ {-} nu [-n-1] $
$ ZT [a ^ nu [n]] + ZT [a ^ {- n} u [-n-1]] = {Z \ sobre Za} + {Z \ sobre Z {-1 \ sobre a}} $
$$ ROC: | z | \ gt a \ quad \ quad ROC: | z | \ lt {1 \ sobre a} $$
O gráfico de ROC tem duas condições como a> 1 e a <1, como você não conhece a.

Nesse caso, não há combinação ROC.
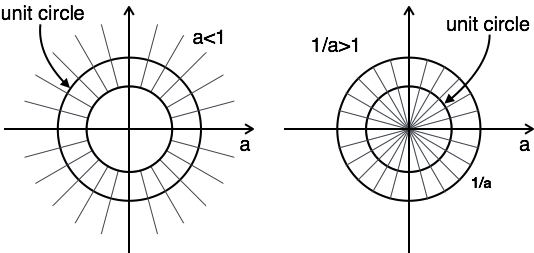
Aqui, a combinação de ROC é de $ a \ lt | z | \ lt {1 \ sobre a} $
Portanto, para este problema, a transformada z é possível quando a <1.
Causalidade e estabilidade
A condição de causalidade para sistemas LTI de tempo discreto é a seguinte:
Um sistema LTI de tempo discreto é causal quando
ROC está fora do pólo externo.
Em A função de transferência H [Z], a ordem do numerador não pode ser maior que a ordem do denominador.
Condição de estabilidade para sistemas LTI de tempo discreto
Um sistema LTI de tempo discreto é estável quando
sua função de sistema H [Z] inclui círculo unitário | z | = 1.
todos os pólos da função de transferência estão dentro do círculo unitário | z | = 1.
Transformada Z de sinais básicos
| x (t) | X [Z] |
|---|---|
| $ \ delta $ | 1 |
| $ u (n) $ | $ {Z \ sobre Z-1} $ |
| $ u (-n-1) $ | $ - {Z \ sobre Z-1} $ |
| $ \ delta (nm) $ | $ z ^ {- m} $ |
| $ a ^ nu [n] $ | $ {Z \ sobre Za} $ |
| $ a ^ nu [-n-1] $ | $ - {Z \ sobre Za} $ |
| $ n \, a ^ nu [n] $ | $ {aZ \ over | Za | ^ 2} $ |
| $ n \, a ^ nu [-n-1] $ | $ - {aZ \ over | Za | ^ 2} $ |
| $ a ^ n \ cos \ omega nu [n] $ | $ {Z ^ 2-aZ \ cos \ omega \ over Z ^ 2-2aZ \ cos \ omega + a ^ 2} $ |
| $ a ^ n \ sin \ omega nu [n] $ | $ {aZ \ sin \ omega \ over Z ^ 2 -2aZ \ cos \ omega + a ^ 2} $ |