Uyarlanabilir Rezonans Teorisi
Bu ağ 1987'de Stephen Grossberg ve Gail Carpenter tarafından geliştirilmiştir. Rekabete dayanmaktadır ve denetimsiz öğrenme modelini kullanır. Adından da anlaşılacağı gibi Uyarlanabilir Rezonans Teorisi (ART) ağları, eski kalıpları (rezonans) kaybetmeden her zaman yeni öğrenmeye (uyarlanabilir) açıktır. Temel olarak ART ağı, bir giriş vektörünü kabul eden ve bunu depolanan modelden hangisine en çok benzediğine bağlı olarak kategorilerden birine sınıflandıran bir vektör sınıflandırıcıdır.
İşletme Sorumlusu
ART sınıflandırmasının ana operasyonu aşağıdaki aşamalara ayrılabilir -
Recognition phase- Giriş vektörü, çıktı katmanındaki her düğümde sunulan sınıflandırmayla karşılaştırılır. Nöronun çıktısı, uygulanan sınıflandırma ile en iyi şekilde eşleşirse "1" olur, aksi takdirde "0" olur.
Comparison phase- Bu aşamada, giriş vektörünün karşılaştırma katmanı vektörüyle bir karşılaştırması yapılır. Sıfırlamanın koşulu, benzerlik derecesinin dikkat parametresinden daha az olmasıdır.
Search phase- Bu aşamada ağ, yukarıdaki aşamalarda yapılan eşleşmenin yanı sıra sıfırlamayı da arayacaktır. Dolayısıyla, sıfırlama olmazsa ve maç oldukça iyiyse, sınıflandırma biter. Aksi takdirde, işlem tekrarlanır ve doğru eşleşmeyi bulmak için saklanan diğer modelin gönderilmesi gerekir.
ART1
İkili vektörleri kümelemek için tasarlanmış bir ART türüdür. Bunu mimarisiyle anlayabiliriz.
ART1 mimarisi
Aşağıdaki iki üniteden oluşur -
Computational Unit - Aşağıdakilerden oluşur -
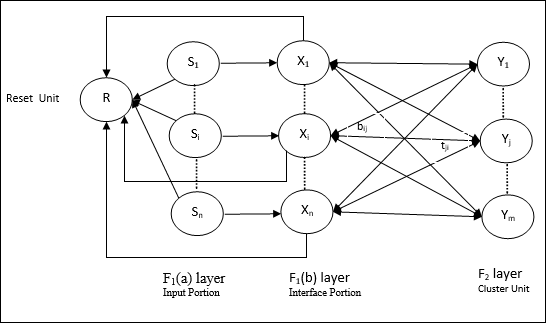
Input unit (F1 layer) - Ayrıca aşağıdaki iki porsiyona sahiptir -
F1(a) layer (Input portion)- ART1'de, sadece giriş vektörlerine sahip olmak yerine bu kısımda hiçbir işlem olmayacaktır. F 1 (b) katmanına (arayüz kısmı) bağlıdır.
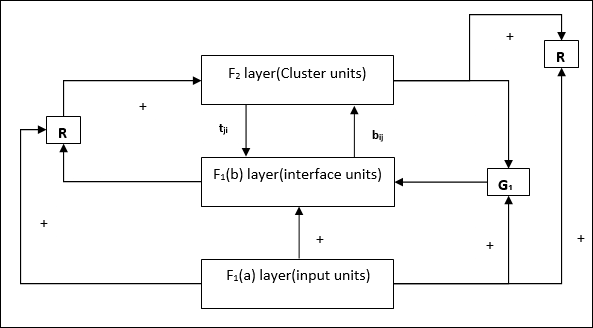
F1(b) layer (Interface portion)- Bu kısım, giriş kısmından gelen sinyali F 2 katmanınınkiyle birleştirir. F 1 (b) tabakası F 2 tabakasına aşağıdan yukarıya ağırlıklar ile bağlanır.bijve F 2 katmanı F 1 (b) katmanına yukarıdan aşağıya ağırlıklarla bağlanırtji.
Cluster Unit (F2 layer)- Bu rekabetçi bir katman. Giriş modelini öğrenmek için en büyük net girişe sahip ünite seçilir. Diğer tüm küme birimlerinin aktivasyonu 0 olarak ayarlanmıştır.
Reset Mechanism- Bu mekanizmanın çalışması, yukarıdan aşağıya ağırlık ile giriş vektörü arasındaki benzerliğe dayanmaktadır. Şimdi, bu benzerliğin derecesi, uyanıklık parametresinden daha düşükse, kümenin modeli öğrenmesine izin verilmez ve bir dinlenme olur.
Supplement Unit - Aslında Reset mekanizmasıyla ilgili sorun, katmanın F2belirli koşullar altında engellenmeli ve bazı öğrenme gerçekleştiğinde de mevcut olmalıdır. Bu nedenle iki ek birim, yaniG1 ve G2 sıfırlama ünitesi ile birlikte eklenir, R. Onlara telefon edildigain control units. Bu birimler ağda bulunan diğer birimlere sinyal alır ve gönderir.‘+’ uyarıcı bir sinyali gösterirken ‘−’ engelleyici bir sinyali gösterir.
Kullanılan Parametreler
Aşağıdaki parametreler kullanılır -
n - Giriş vektöründeki bileşenlerin sayısı
m - Oluşturulabilecek maksimum küme sayısı
bij- F 1 (b) 'den F 2 katmanına kadar ağırlık, yani aşağıdan yukarıya ağırlıklar
tji- F 2'den F 1 (b) katmanına kadar ağırlık, yani yukarıdan aşağıya ağırlıklar
ρ - Vigilance parametresi
||x|| - x vektörünün normu
Algoritma
Step 1 - Öğrenme oranını, uyanıklık parametresini ve ağırlıkları aşağıdaki şekilde başlatın -
$$ \ alpha \:> \: 1 \: \: ve \: \: 0 \: <\ rho \: \ leq \: 1 $$
$$ 0 \: <\: b_ {ij} (0) \: <\: \ frac {\ alpha} {\ alpha \: - \: 1 \: + \: n} \: \: ve \: \: t_ {ij} (0) \: = \: 1 $$
Step 2 - Durdurma koşulu doğru olmadığında adım 3-9'a devam edin.
Step 3 - Her eğitim girdisi için adım 4-6'ya devam edin.
Step 4- Tüm F 1 (a) ve F 1 birimlerinin aktivasyonlarını aşağıdaki gibi ayarlayın
F2 = 0 and F1(a) = input vectors
Step 5- F 1 (a) 'dan F 1 (b) katmanına giriş sinyali aşağıdaki gibi gönderilmelidir.
$$ s_ {i} \: = \: x_ {i} $$
Step 6- Engellenen her F 2 düğümü için
$ y_ {j} \: = \: \ sum_i b_ {ij} x_ {i} $ koşul yj ≠ -1
Step 7 - Sıfırlama doğru olduğunda adım 8-10'u gerçekleştirin.
Step 8 - Bul J için yJ ≥ yj tüm düğümler için j
Step 9- F 1 (b) ' deki aktivasyonu aşağıdaki gibi tekrar hesaplayın
$$ x_ {i} \: = \: sitJi $$
Step 10 - Şimdi, vektörün normunu hesapladıktan sonra x ve vektör s, sıfırlama koşulunu aşağıdaki gibi kontrol etmemiz gerekir -
Eğer ||x||/ ||s|| <vigilance parametresi ρ, sonranode inhibe J ve 7. adıma gidin
Else If ||x||/ ||s|| ≥ uyanıklık parametresi ρdaha sonra devam edin.
Step 11 - Düğüm için ağırlık güncelleme J aşağıdaki gibi yapılabilir -
$$ b_ {ij} (yeni) \: = \: \ frac {\ alpha x_ {i}} {\ alpha \: - \: 1 \: + \: || x ||} $$
$$ t_ {ij} (yeni) \: = \: x_ {i} $$
Step 12 - Algoritma için durdurma koşulu kontrol edilmelidir ve aşağıdaki gibi olabilir -
- Kilo değişikliği yapmayın.
- Üniteler için sıfırlama yapılmaz.
- Maksimum dönem sayısına ulaşıldı.