Hızlı rehber
Modern elektronik dünyasında terim Digital terimi genellikle bir bilgisayarla ilişkilendirilir çünkü Digitalrakamları sayarak bilgisayarların işlem yapma şeklinden türetilir. Uzun yıllar boyunca dijital elektroniğin uygulaması sadece bilgisayar sistemindeydi. Ancak günümüzde dijital elektronik, diğer birçok uygulamada kullanılmaktadır. Aşağıdaki örneklerden bazıları verilmiştir.Digital electronics yoğun olarak kullanılmaktadır.
- Endüstriyel proses kontrolü
- Askeri sistem
- Television
- İletişim sistemi
- Tıbbi malzeme
- Radar
- Navigation
Sinyal
Signalbazı bilgiler içeren fiziksel bir miktar olarak tanımlanabilir. Bir veya birden fazla bağımsız değişkenin fonksiyonudur. Sinyaller iki türdendir.
- Analog Sinyal
- Dijital sinyal
Analog Sinyal
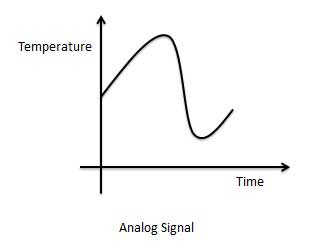
Bir analog signalsürekli değerlere sahip sinyal olarak tanımlanır. Analog sinyalin sonsuz sayıda farklı değeri olabilir. Gerçek dünya senaryosunda, doğada gözlemlenen şeylerin çoğu analogdur. Analog sinyallerin örnekleri aşağıdadır.
- Temperature
- Pressure
- Distance
- Sound
- Voltage
- Current
- Power
Analog Sinyalin (Sıcaklık) grafik gösterimi
Analog sinyalleri işleyen devrelere analog devreler veya sistem adı verilir. Analog sistemin örnekleri aşağıdadır.
- Filter
- Amplifiers
- Televizyon alıcısı
- Motor hız kontrolörü
Analog Sistemlerin Dezavantajı
- Daha az doğruluk
- Daha az çok yönlülük
- Daha fazla gürültü etkisi
- Daha fazla bozulma
- Havanın daha fazla etkisi
Dijital sinyal
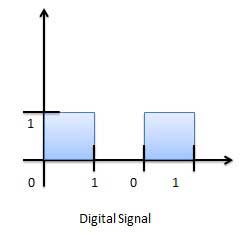
Bir digital signalyalnızca sınırlı sayıda farklı değere sahip sinyal olarak tanımlanır. Dijital sinyaller sürekli sinyaller değildir. Dijital elektronik hesap makinesinde giriş anahtarlar yardımı ile verilmektedir. Bu giriş, iki ayrı değer veya seviyeye sahip elektrik sinyaline dönüştürülür. Bunlardan biri düşük seviye, diğeri ise yüksek seviye olarak adlandırılabilir. Sinyal her zaman iki seviyeden biri olacaktır. Bu tip sinyale dijital sinyal denir. Dijital sinyal örnekleri aşağıdadır.
- İkili Sinyal
- Sekizli Sinyal
- Onaltılık Sinyal
Dijital Sinyalin (İkili) grafik gösterimi
Dijital sinyalleri işleyen devrelere dijital sistemler veya dijital devreler denir. Dijital sistemlerin örnekleri aşağıdadır.
- Registers
- Flip-flop
- Counters
- Microprocessors
Dijital Sistemlerin Avantajı
- Daha fazla doğruluk
- Daha fazla çok yönlülük
- Daha az bozulma
- Kolay iletişim
- Olası bilgi saklama
Analog ve Dijital Sinyalin Karşılaştırılması
| SN | Analog Sinyal | Dijital sinyal |
|---|---|---|
| 1 | Analog sinyalin sonsuz değerleri vardır. | Dijital sinyalin sınırlı sayıda değeri vardır. |
| 2 | Analog sinyalin sürekli bir yapısı vardır. | Dijital sinyalin ayrı bir doğası vardır. |
| 3 | Analog sinyal, dönüştürücüler ve sinyal oluşturucular tarafından üretilir. | Dijital sinyal, A'dan D'ye dönüştürücü tarafından üretilir. |
| 4 | Analog sinyal örneği - sinüs dalgası, üçgen dalgalar. | Dijital sinyal örneği - ikili sinyal. |
Bir dijital sistem, konumsal sayı sistemini yalnızca rakam adı verilen birkaç simgenin olduğu yerlerde anlayabilir ve bu simgeler, sayı içinde kapladıkları konuma bağlı olarak farklı değerleri temsil eder.
Bir sayıdaki her bir basamağın değeri, kullanılarak belirlenebilir
Rakam
Rakamdaki rakamın konumu
Sayı sisteminin tabanı (burada taban, sayı sisteminde mevcut olan toplam basamak sayısı olarak tanımlanır).
Ondalık Sayı Sistemi
Günlük hayatımızda kullandığımız sayı sistemi ondalık sayı sistemidir. Ondalık sayı sistemi, 0'dan 9'a kadar 10 basamak kullandığı için 10 tabanına sahiptir. Ondalık sayı sisteminde, ondalık noktanın solundaki ardışık pozisyonlar birimleri, onlarca, yüzleri, binleri vb. Temsil eder.
Her pozisyon, tabanın (10) belirli bir gücünü temsil eder. Örneğin, 1234 ondalık sayısı, birimler konumunda 4, onlar konumunda 3, yüzler konumunda 2 ve binler konumunda 1 rakamından oluşur ve değeri şu şekilde yazılabilir:
(1×1000) + (2×100) + (3×10) + (4×l)
(1×103) + (2×102) + (3×101) + (4×l00)
1000 + 200 + 30 + 1
1234Bir bilgisayar programcısı veya bir BT uzmanı olarak, bilgisayarlarda sıklıkla kullanılan aşağıdaki sayı sistemlerini anlamalısınız.
| SN | Sayı Sistemi ve Açıklama |
|---|---|
| 1 | Binary Number System Taban 2. Kullanılan rakamlar: 0, 1 |
| 2 | Octal Number System Taban 8. Kullanılan rakamlar: 0-7 |
| 3 | Hexa Decimal Number System Taban 16. Kullanılan rakamlar: 0 - 9, Kullanılan harfler: A- F |
İkili Sayı Sistemi
Özellikler
0 ve 1 olmak üzere iki basamak kullanır.
2 taban sayı sistemi olarak da adlandırılır
İkili sayıdaki her konum, tabanın (2) 0 kuvvetini temsil eder. Örnek: 2 0
İkili sayıdaki son konum, tabanın (2) x kuvvetini temsil eder. Örnek: 2 x burada x son konumu temsil eder - 1.
Misal
İkili Sayı: 10101 2
Ondalık Eşdeğeri Hesaplanıyor -
| Adım | İkili numara | Ondalık sayı |
|---|---|---|
| Aşama 1 | 10101 2 | ((1 × 2 4 ) + (0 × 2 3 ) + (1 × 2 2 ) + (0 × 2 1 ) + (1 × 2 0 )) 10 |
| Adım 2 | 10101 2 | (16 + 0 + 4 + 0 + 1) 10 |
| Aşama 3 | 10101 2 | 21 10 |
Note:10101 2 , normalde 10101 olarak yazılır.
Sekizli Sayı Sistemi
Özellikler
Sekiz basamaklı 0,1,2,3,4,5,6,7 kullanır.
8 tabanlı sayı sistemi olarak da adlandırılır
Sekizlik bir sayıdaki her konum, tabanın (8) 0 kuvvetini temsil eder. Örnek: 8 0
Sekizlik bir sayıdaki son konum, tabanın (8) x üssünü temsil eder. Örnek: 8 x burada x son konumu temsil eder - 1.
Misal
Sekizli Sayı - 12570 8
Ondalık Eşdeğeri Hesaplanıyor -
| Adım | Sekizli Sayı | Ondalık sayı |
|---|---|---|
| Aşama 1 | 12570 8 | ((1 × 8 4 ) + (2 × 8 3 ) + (5 × 8 2 ) + (7 × 8 1 ) + (0 × 8 0 )) 10 |
| Adım 2 | 12570 8 | (4096 + 1024 + 320 + 56 + 0) 10 |
| Aşama 3 | 12570 8 | 5496 10 |
Note:12570 8 , normalde 12570 olarak yazılır.
Onaltılık Sayı Sistemi
Özellikler
10 basamak ve 6 harf kullanır, 0,1,2,3,4,5,6,7,8,9, A, B, C, D, E, F.
Harfler 10'dan başlayan sayıları temsil eder. A = 10, B = 11, C = 12, D = 13, E = 14, F = 15.
16 tabanlı sayı sistemi olarak da adlandırılır.
Onaltılık sayıdaki her bir konum, tabanın (16) 0 kuvvetini temsil eder. Örnek 16 0 .
Onaltılık bir sayıdaki son konum, tabanın (16) x üssünü temsil eder. Örnek 16 x burada x son konumu temsil eder - 1.
Örnek -
Onaltılık Sayı: 19FDE 16
Ondalık Eşdeğeri Hesaplanıyor -
| Adım | Onaltılık Sayı | Ondalık sayı |
|---|---|---|
| Aşama 1 | 19FDE 16 | ((1 × 16 4 ) + (9 × 16 3 ) + (F × 16 2 ) + (D × 16 1 ) + (E × 16 0 )) 10 |
| Adım 2 | 19FDE 16 | ((1 × 16 4 ) + (9 × 16 3 ) + (15 × 16 2 ) + (13 × 16 1 ) + (14 × 16 0 )) 10 |
| Aşama 3 | 19FDE 16 | (65536 + 36864 + 3840 + 208 + 14) 10 |
| 4. adım | 19FDE 16 | 106462 10 |
Note −19FDE 16 normalde 19FDE olarak yazılır.
Sayıları bir tabandan diğerine dönüştürmek için kullanılabilecek birçok yöntem veya teknik vardır. Burada aşağıdakileri göstereceğiz -
- Diğer Temel Sisteme Ondalık
- Ondalık Diğer Temel Sistem
- Ondalık Olmayan Diğer Temel Sistem
- Kısayol yöntemi - İkiliden Sekizliye
- Kısayol yöntemi - Sekizlikten İkiye
- Kısayol yöntemi - İkiliden Onaltılıya
- Kısayol yöntemi - Onaltılıktan İkiye
Diğer Temel Sisteme Ondalık
Adımlar
Step 1 - Dönüştürülecek ondalık sayıyı yeni tabanın değerine bölün.
Step 2 - Yeni temel sayının en sağdaki basamağı (en önemsiz basamağı) olarak Adım 1'den kalanı alın.
Step 3 - Bir önceki bölümün bölümünü yeni tabana bölün.
Step 4 - 3. Adımdan kalanı yeni temel numaranın sonraki rakamı (solda) olarak kaydedin.
Adım 3'te bölüm sıfır olana kadar kalanları sağdan sola alarak Adım 3 ve 4'ü tekrarlayın.
Bu şekilde elde edilen son kalan, yeni temel numaranın En Önemli Basamağı (MSD) olacaktır.
Örnek -
Ondalık Sayı: 29 10
İkili Eşdeğeri Hesaplanıyor -
| Adım | Operasyon | Sonuç | Kalan |
|---|---|---|---|
| Aşama 1 | 29/2 | 14 | 1 |
| Adım 2 | 14/2 | 7 | 0 |
| Aşama 3 | 7/2 | 3 | 1 |
| 4. adım | 3/2 | 1 | 1 |
| Adım 5 | 1/2 | 0 | 1 |
Adım 2 ve 4'te bahsedildiği gibi, kalanların ters sırada düzenlenmesi gerekir, böylece ilk kalan en Az Önemli Hane (LSD) olur ve son kalan En Önemli Hane (MSD) olur.
Ondalık Sayı - 29 10 = İkili Sayı - 11101 2 .
Ondalık Sisteme Diğer Temel Sistem
Adımlar
Step 1 - Her basamağın sütun (konumsal) değerini belirleyin (bu, basamağın konumuna ve sayı sisteminin tabanına bağlıdır).
Step 2 - Elde edilen sütun değerlerini (1. Adımda) ilgili sütunlardaki rakamlarla çarpın.
Step 3 - 2. Adımda hesaplanan ürünleri toplayın. Toplam, ondalık sayıdaki eşdeğer değerdir.
Misal
İkili Sayı - 11101 2
Ondalık Eşdeğeri Hesaplanıyor -
| Adım | İkili numara | Ondalık sayı |
|---|---|---|
| Aşama 1 | 11101 2 | ((1 × 2 4 ) + (1 × 2 3 ) + (1 × 2 2 ) + (0 × 2 1 ) + (1 × 2 0 )) 10 |
| Adım 2 | 11101 2 | (16 + 8 + 4 + 0 + 1) 10 |
| Aşama 3 | 11101 2 | 29 10 |
İkili Sayı - 11101 2 = Ondalık Sayı - 29 10
Ondalık Olmayan Sisteme Diğer Temel Sistem
Adımlar
Step 1 - Orijinal sayıyı ondalık sayıya dönüştürün (10 tabanı).
Step 2 - Elde edilen ondalık sayıyı yeni temel sayıya dönüştürün.
Misal
Sekizli Sayı - 25 8
İkili Eşdeğeri Hesaplanıyor -
Adım 1 - Ondalığa Dönüştür
| Adım | Sekizli Sayı | Ondalık sayı |
|---|---|---|
| Aşama 1 | 25 8 | ((2 × 8 1 ) + (5 × 8 0 )) 10 |
| Adım 2 | 25 8 | (16 + 5) 10 |
| Aşama 3 | 25 8 | 21 10 |
Sekizli Sayı - 25 8 = Ondalık Sayı - 21 10
Adım 2 - Ondalık Sayıyı İkiliye Dönüştür
| Adım | Operasyon | Sonuç | Kalan |
|---|---|---|---|
| Aşama 1 | 21/2 | 10 | 1 |
| Adım 2 | 10/2 | 5 | 0 |
| Aşama 3 | 5/2 | 2 | 1 |
| 4. adım | 2/2 | 1 | 0 |
| Adım 5 | 1/2 | 0 | 1 |
Ondalık Sayı - 21 10 = İkili Sayı - 10101 2
Sekizli Sayı - 25 8 = İkili Sayı - 10101 2
Kısayol yöntemi - İkiliden Sekizliye
Adımlar
Step 1 - İkili rakamları üçe ayırın (sağdan başlayarak).
Step 2 - Her üç ikili basamak grubunu bir sekizlik basamağa dönüştürün.
Misal
İkili Sayı - 10101 2
Sekizli Eşdeğeri Hesaplanıyor -
| Adım | İkili numara | Sekizli Sayı |
|---|---|---|
| Aşama 1 | 10101 2 | 010 101 |
| Adım 2 | 10101 2 | 2 8 5 8 |
| Aşama 3 | 10101 2 | 25 8 |
İkili Sayı - 10101 2 = Sekizli Sayı - 25 8
Kısayol yöntemi - Sekizlikten İkiye
Adımlar
Step 1 - Her sekizlik basamağı 3 basamaklı bir ikili sayıya dönüştürün (sekizlik basamaklar bu dönüştürme için ondalık sayı olarak kabul edilebilir).
Step 2 - Ortaya çıkan tüm ikili grupları (her biri 3 basamaklı) tek bir ikili sayı olarak birleştirin.
Misal
Sekizli Sayı - 25 8
İkili Eşdeğeri Hesaplanıyor -
| Adım | Sekizli Sayı | İkili numara |
|---|---|---|
| Aşama 1 | 25 8 | 2 10 5 10 |
| Adım 2 | 25 8 | 010 2 101 2 |
| Aşama 3 | 25 8 | 010101 2 |
Sekizli Sayı - 25 8 = İkili Sayı - 10101 2
Kısayol yöntemi - İkiliden Onaltılıya
Adımlar
Step 1 - İkili rakamları dörde bölün (sağdan başlayarak).
Step 2 - Her dört ikili basamak grubunu bir onaltılık sembole dönüştürün.
Misal
İkili Sayı - 10101 2
Onaltılık Eşdeğeri Hesaplanıyor -
| Adım | İkili numara | Onaltılık Sayı |
|---|---|---|
| Aşama 1 | 10101 2 | 0001 0101 |
| Adım 2 | 10101 2 | 1 10 5 10 |
| Aşama 3 | 10101 2 | 15 16 |
İkili Sayı - 10101 2 = Onaltılık Sayı - 15 16
Kısayol yöntemi - Onaltılıktan İkiye
Adımlar
Step 1 - Her onaltılık basamağı 4 basamaklı bir ikili sayıya dönüştürün (onaltılık basamaklar bu dönüştürme için ondalık sayı olarak kabul edilebilir).
Step 2 - Ortaya çıkan tüm ikili grupları (her biri 4 basamaklı) tek bir ikili sayı olarak birleştirin.
Misal
Onaltılık Sayı - 15 16
İkili Eşdeğeri Hesaplanıyor -
| Adım | Onaltılık Sayı | İkili numara |
|---|---|---|
| Aşama 1 | 15 16 | 1 10 5 10 |
| Adım 2 | 15 16 | 0001 2 0101 2 |
| Aşama 3 | 15 16 | 00010101 2 |
Onaltılık Sayı - 15 16 = İkili Sayı - 10101 2
Kodlamada, sayılar, harfler veya kelimeler belirli bir sembol grubu ile temsil edildiğinde, sayı, harf veya kelimenin kodlandığı söylenir. Semboller grubu kod olarak adlandırılır. Dijital veriler ikili bitler grubu olarak temsil edilir, depolanır ve iletilir. Bu grup aynı zamandabinary code. İkili kod, sayı ve alfasayısal harf ile temsil edilir.
İkili Kodun Avantajları
İkili kodun sunduğu avantajların listesi aşağıdadır.
İkili kodlar bilgisayar uygulamaları için uygundur.
İkili kodlar dijital iletişim için uygundur.
İkili kodlar kullanırsak, ikili kodlar dijital devrelerin analizini ve tasarımını yapar.
Sadece 0 & 1 kullanıldığı için uygulama kolaylaşır.
İkili kodların sınıflandırılması
Kodlar genel olarak aşağıdaki dört kategoriye ayrılmıştır.
- Ağırlıklı Kodlar
- Ağırlıksız Kodlar
- İkili Kodlu Ondalık Kod
- Alfanümerik Kodlar
- Hata Tespit Kodları
- Hata Düzeltme Kodları
Ağırlıklı Kodlar
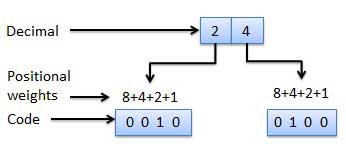
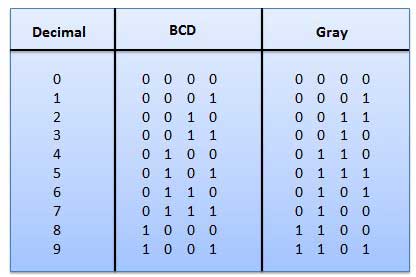
Ağırlıklı ikili kodlar, konumsal ağırlık ilkesine uyan ikili kodlardır. Sayının her konumu belirli bir ağırlığı temsil eder. 0 ila 9 arasındaki ondalık basamakları ifade etmek için çeşitli kod sistemleri kullanılır. Bu kodlarda her ondalık basamak, dört bitlik bir grupla temsil edilir.
Ağırlıksız Kodlar
Bu tür ikili kodlarda, konumsal ağırlıklar atanmaz. Ağırlıksız kod örnekleri, Fazla-3 kodu ve Gray kodudur.
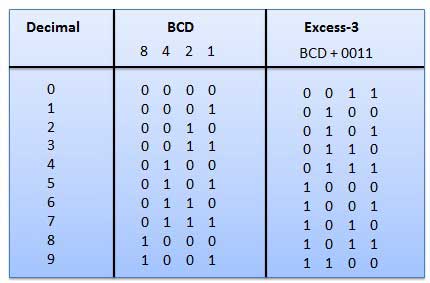
Fazla-3 kodu
Fazla-3 kodu, XS-3 kodu olarak da adlandırılır. Ondalık sayıları ifade etmek için kullanılan ağırlıksız koddur. Fazla-3 kod sözcükleri, 8421'deki her bir kod sözcüğüne (0011) 2 veya (3) 10 ekleyen 8421 BCD kod sözcüklerinden türetilir. Fazla-3 kodlar aşağıdaki gibi elde edilir -

Misal
Gri Kod
Ağırlıksız koddur ve aritmetik kod değildir. Bu, bit konumuna atanmış belirli ağırlıkların olmadığı anlamına gelir. Şekil 2'de gösterildiği gibi, ondalık sayı her arttığında yalnızca bir bitin değişeceği çok özel bir özelliğe sahiptir. Bir seferde yalnızca bir bit değiştiği için, gri kod birim mesafe kodu olarak adlandırılır. Gri kod, döngüsel bir koddur. Gri kod aritmetik işlem için kullanılamaz.
Gray kodunun uygulanması
Gri kod, şaft pozisyon kodlayıcılarında yaygın olarak kullanılmaktadır.
Bir şaft konumu kodlayıcı, şaftın açısal konumunu temsil eden bir kod sözcüğü üretir.
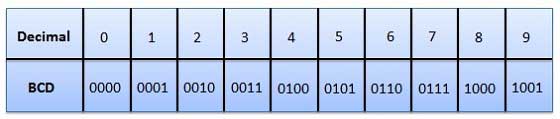
İkili Kodlu Ondalık (BCD) kodu
Bu kodda her ondalık basamak 4 bitlik bir ikili sayı ile temsil edilir. BCD, ondalık basamakların her birini ikili bir kodla ifade etmenin bir yoludur. BCD'de dört bit ile on altı sayıyı temsil edebiliriz (0000 - 1111). Ancak BCD kodunda bunlardan yalnızca ilk on tanesi kullanılır (0000 ila 1001). Kalan altı kod kombinasyonu, yani 1010 ila 1111 BCD'de geçersizdir.
BCD Kodlarının Avantajları
- Ondalık sisteme çok benzer.
- Yalnızca 0'dan 9'a kadar ondalık sayıların ikili eşdeğerini hatırlamamız gerekir.
BCD Kodlarının Dezavantajları
BCD'nin toplanması ve çıkarılması farklı kurallara sahiptir.
BCD aritmetiği biraz daha karmaşıktır.
BCD'nin ondalık sayıyı temsil etmesi için ikiliden daha fazla bit sayısına ihtiyacı vardır. Yani BCD ikiliden daha az verimlidir.
Alfanümerik kodlar
İkili bir rakam veya bit, yalnızca iki '0' veya '1' durumuna sahip olduğundan yalnızca iki sembolü temsil edebilir. Ancak bu, iki bilgisayar arasındaki iletişim için yeterli değildir çünkü orada iletişim için daha birçok sembole ihtiyacımız var. Bu sembollerin büyük ve küçük harflerle, 0'dan 9'a kadar sayılarla, noktalama işaretleriyle ve diğer sembollerle 26 alfabeyi temsil etmesi gerekir.
Alfasayısal kodlar, sayıları ve alfabetik karakterleri temsil eden kodlardır. Çoğunlukla bu tür kodlar, bilgi iletmek için gerekli sembol ve çeşitli talimatlar gibi diğer karakterleri de temsil eder. Alfasayısal bir kod en az 10 rakam ve 26 harf yani toplam 36 maddeyi temsil etmelidir. Aşağıdaki üç alfanümerik kod, veri gösterimi için çok yaygın olarak kullanılmaktadır.
- Bilgi Değişimi için Amerikan Standart Kodu (ASCII).
- Genişletilmiş İkili Kodlu Ondalık Değişim Kodu (EBCDIC).
- Beş bitlik Baudot Kodu.
ASCII kodu 7 bitlik bir koddur, EBCDIC ise 8 bitlik bir koddur. ASCII kodu dünya çapında daha yaygın olarak kullanılırken, EBCDIC esas olarak büyük IBM bilgisayarlarında kullanılır.
Hata Kodları
Veri aktarımı sırasında verileri tespit etmek ve düzeltmek için kullanılabilen ikili kod teknikleri vardır.
| Hata kodu | Açıklama |
|---|---|
Hata Tespit ve Düzeltme |
Hata tespiti ve düzeltme kodu teknikleri |
Kodu bir formattan diğerine dönüştürmek için kullanılabilecek birçok yöntem veya teknik vardır. Burada aşağıdakileri göstereceğiz
- İkiliden BCD'ye Dönüştürme
- BCD'den İkili Dönüşüm
- BCD'den Fazla-3'e
- Fazla-3'ten BCD'ye
İkiliden BCD'ye Dönüştürme
Adımlar
Step 1 - İkili sayıyı ondalık sayıya dönüştürün.
Step 2 - Ondalık sayıyı BCD'ye dönüştürün.
Örnek - (11101) 2'yi BCD'ye dönüştürün .
Adım 1 - Ondalığa Dönüştür
İkili Sayı - 11101 2
Ondalık Eşdeğeri Hesaplanıyor -
| Adım | İkili numara | Ondalık sayı |
|---|---|---|
| Aşama 1 | 11101 2 | ((1 × 2 4 ) + (1 × 2 3 ) + (1 × 2 2 ) + (0 × 2 1 ) + (1 × 2 0 )) 10 |
| Adım 2 | 11101 2 | (16 + 8 + 4 + 0 + 1) 10 |
| Aşama 3 | 11101 2 | 29 10 |
İkili Sayı - 11101 2 = Ondalık Sayı - 29 10
Adım 2 - BCD'ye Dönüştür
Ondalık Sayı - 29 10
BCD Eşdeğeri Hesaplanıyor. Her rakamı, eşdeğer dört ikili rakamdan oluşan gruplara dönüştürün.
| Adım | Ondalık sayı | Dönüştürmek |
|---|---|---|
| Aşama 1 | 29 10 | 0010 2 1001 2 |
| Adım 2 | 29 10 | 00101001 BCD |
Sonuç
(11101)2 = (00101001)BCDBCD'den İkili Dönüşüm
Adımlar
Step 1 - BCD numarasını ondalık sayıya dönüştürün.
Step 2 - Ondalık sayıları ikiliye çevir.
Örnek - dönüştürme (00101001) BCD Binary.
Adım 1 - BCD'ye Dönüştür
BCD Numarası - (00101001) BCD
Ondalık Eşdeğeri Hesaplanıyor. Her dört rakamı bir gruba dönüştürün ve her grup için ondalık eşdeğeri alın.
| Adım | BCD Numarası | Dönüştürmek |
|---|---|---|
| Aşama 1 | (00101001) BCD | 0010 2 1001 2 |
| Adım 2 | (00101001) BCD | 2 10 9 10 |
| Aşama 3 | (00101001) BCD | 29 10 |
BCD Numarası - (00101001) BCD = Ondalık Sayı - 29 10
Adım 2 - İkiliye Dönüştür
Ondalıktan ikiliye dönüştürme için uzun bölme yöntemi kullanıldı.
Ondalık Sayı - 29 10
İkili Eşdeğeri Hesaplanıyor -
| Adım | Operasyon | Sonuç | Kalan |
|---|---|---|---|
| Aşama 1 | 29/2 | 14 | 1 |
| Adım 2 | 14/2 | 7 | 0 |
| Aşama 3 | 7/2 | 3 | 1 |
| 4. adım | 3/2 | 1 | 1 |
| Adım 5 | 1/2 | 0 | 1 |
Adım 2 ve 4'te bahsedildiği gibi, kalanların ters sırada düzenlenmesi gerekir, böylece ilk kalan en az önemli rakam (LSD) olur ve son kalan en önemli rakam (MSD) olur.
Ondalık Sayı - 29 10 = İkili Sayı - 11101 2
Sonuç
(00101001)BCD = (11101)2BCD'den Fazla-3'e
Adımlar
Step 1 - BCD'yi ondalık sayıya dönüştürün.
Step 2- Bu ondalık sayıya (3) 10 ekleyin .
Step 3 - Fazla-3 kodu almak için ikiliye dönüştürün.
Örnek - (0110) BCD'yi Aşırı-3'e dönüştürün.
Adım 1 - Ondalığa dönüştürün
(0110) BCD = 6 10
Adım 2 - Ondalığa 3 ekleyin
(6) 10 + (3) 10 = (9) 10
Adım 3 - Fazlalık-3'e Dönüştür
(9) 10 = (1001) 2
Sonuç
(0110)BCD = (1001)XS-3Fazla-3'ten BCD'ye Dönüştürme
Adımlar
Step 1- Karşılık gelen BCD kodunu elde etmek için her 4 bit fazla 3 haneden (0011) 2 çıkarın.
Örnek - (10011010) XS-3'ü BCD'ye dönüştürün .
Given XS-3 number = 1 0 0 1 1 0 1 0
Subtract (0011)2 = 1 0 0 1 0 1 1 1
--------------------
BCD = 0 1 1 0 0 1 1 1Sonuç
(10011010)XS-3 = (01100111)BCDÇıkarma işlemini basitleştirmek ve mantıksal manipülasyonlar için dijital bilgisayarlarda tamamlayıcılar kullanılır. Her bir radix-r sistemi için (radix r sayı sisteminin tabanını temsil eder) iki tür tamamlayıcı vardır.
| SN | Tamamlayıcı | Açıklama |
|---|---|---|
| 1 | Radix Tamamlayıcı | Radix tamamlayıcısı, r'nin tümleyicisi olarak adlandırılır |
| 2 | Azaltılmış Radix Tamamlama | Azaltılmış radix tamamlayıcısı, (r-1) 'in tamamlayıcısı olarak adlandırılır |
İkili sistem tamamlayıcılar
İkili sistemin tabanı r = 2 olduğundan, ikili sistem için iki tür tamamlayıcı, 2'nin tümleyeni ve 1'in tümleyicisidir.
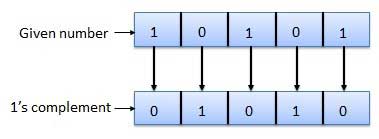
1'in tamamlayıcısı
Bir sayının 1'in tamamlayıcısı, tüm 1'leri 0'lara ve tüm 0'ları 1'lere değiştirerek bulunur. Buna tamamlayıcı veya 1'in tümleyicisini almak denir. 1'in Tamamlama Örneği aşağıdaki gibidir.
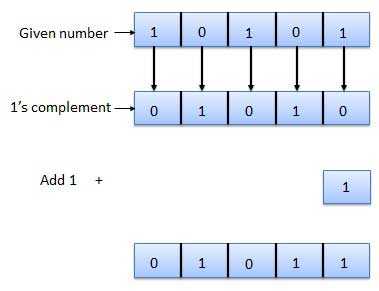
2'nin tamamlayıcısı
2'nin ikili sayının tamamlayıcısı, sayının 1'in tümleyeninin En Az Önemli Bitine (LSB) 1 eklenerek elde edilir.
2'nin tümleyen = 1'in tümleyen + 1
2'nin Tamamlayıcı Örneği aşağıdaki gibidir.
İkili aritmetik, tüm dijital bilgisayarların ve diğer birçok dijital sistemin önemli bir parçasıdır.
İkili Toplama
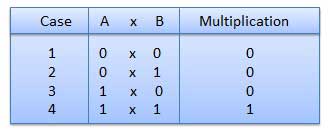
İkili çıkarma, çarpma, bölme için bir anahtardır. İkili toplamanın dört kuralı vardır.
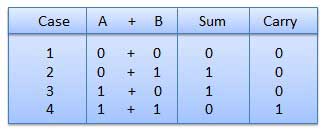
Dördüncü durumda, ikili bir toplama (1 + 1 = 10) toplamı oluşturur, yani verilen sütuna 0 yazılır ve bir sonraki sütuna 1 taşınır.
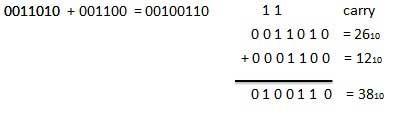
Örnek - Toplama
İkili Çıkarma
Subtraction and Borrow, bu iki kelime ikili çıkarma için çok sık kullanılacaktır. İkili çıkarmanın dört kuralı vardır.
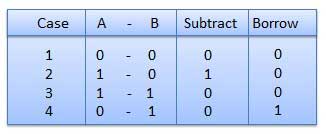
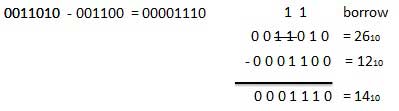
Örnek - Çıkarma
İkili Çarpma
İkili çarpma, ondalık çarpmaya benzer. Ondalık çarpmadan daha basittir çünkü yalnızca 0'lar ve 1'ler vardır. İkili çarpmanın dört kuralı vardır.
Örnek - Çarpma
İkili Bölme
İkili bölme, ondalık bölmeye benzer. Uzun bölme prosedürü olarak adlandırılır.
Örnek - Bölüm

Sekizli Sayı Sistemi
Aşağıda sekizlik sayı sisteminin özellikleri verilmiştir.
Sekiz basamaklı 0,1,2,3,4,5,6,7 kullanır.
8 tabanlı sayı sistemi olarak da adlandırılır.
Sekizlik bir sayıdaki her konum, tabanın (8) 0 kuvvetini temsil eder. Örnek: 8 0
Sekizlik bir sayıdaki son konum, tabanın (8) x üssünü temsil eder. Örnek: 8 x burada x son konumu temsil eder - 1.
Misal
Sekizli Sayı - 12570 8
Ondalık Eşdeğeri Hesaplanıyor -
| Adım | Sekizli Sayı | Ondalık sayı |
|---|---|---|
| Aşama 1 | 12570 8 | ((1 × 8 4 ) + (2 × 8 3 ) + (5 × 8 2 ) + (7 × 8 1 ) + (0 × 8 0 )) 10 |
| Adım 2 | 12570 8 | (4096 + 1024 + 320 + 56 + 0) 10 |
| Aşama 3 | 12570 8 | 5496 10 |
Note −12570 8 , normalde 12570 olarak yazılır.
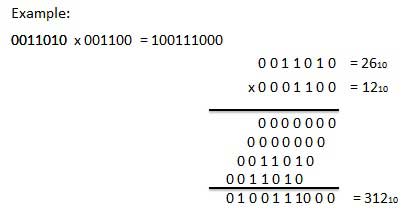
Sekizli Toplama
Aşağıdaki sekizlik toplama tablosu, sekizli toplamayı işlemenize yardımcı olacaktır.
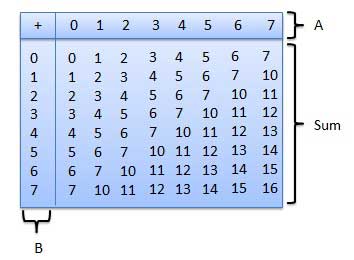
Bu tabloyu kullanmak için, bu örnekte kullanılan talimatları izleyin: 6 8 ve 5 8'i ekleyin . A sütununda 6'yı bulun ve ardından B sütununda 5'i bulun. Bu iki sütunun kesiştiği 'toplam' alanındaki nokta, iki sayının 'toplamı'dır.
68 + 58 = 138.Örnek - Toplama
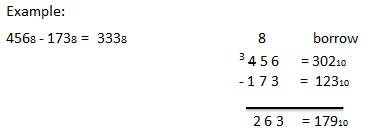
Sekizli Çıkarma
Sekizli sayıların çıkarılması, diğer sayı sistemlerinde sayıların çıkarılmasıyla aynı kuralları izler. Tek varyasyon ödünç alınan sayıdadır. Ondalık sistemde, 10 10'luk bir grup ödünç alırsınız . İkili sistemde, 2 10 kişilik bir grup ödünç alırsınız . Sekizli sistemde 8 10 kişilik bir grup ödünç alırsınız .
Örnek - Çıkarma
Onaltılık Sayı Sistemi
Aşağıda onaltılık sayı sisteminin özellikleri verilmiştir.
10 basamak ve 6 harf kullanır, 0,1,2,3,4,5,6,7,8,9, A, B, C, D, E, F.
Harfler 10'dan başlayan sayıları temsil eder. A = 10, B = 11, C = 12, D = 13, E = 14, F = 15.
16 tabanlı sayı sistemi olarak da adlandırılır.
Onaltılık sayıdaki her bir konum, tabanın (16) 0 kuvvetini temsil eder. Örnek - 16 0
Onaltılık bir sayıdaki son konum, tabanın (16) x üssünü temsil eder. Örnek - 16 x, burada x son konumu temsil eder - 1.
Misal
Onaltılık Sayı - 19FDE 16
Ondalık Eşdeğeri Hesaplanıyor -
| Adım | Onaltılık Sayı | Ondalık sayı |
|---|---|---|
| Aşama 1 | 19FDE 16 | ((1 × 16 4 ) + (9 × 16 3 ) + (F × 16 2 ) + (D × 16 1 ) + (E × 16 0 )) 10 |
| Adım 2 | 19FDE 16 | ((1 × 16 4 ) + (9 × 16 3 ) + (15 × 16 2 ) + (13 × 16 1 ) + (14 × 16 0 )) 10 |
| Aşama 3 | 19FDE 16 | (65536 + 36864 + 3840 + 208 + 14) 10 |
| 4. adım | 19FDE 16 | 106462 10 |
Note −19FDE 16 normalde 19FDE olarak yazılır.
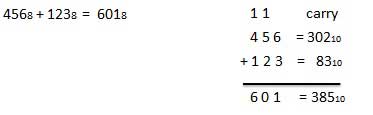
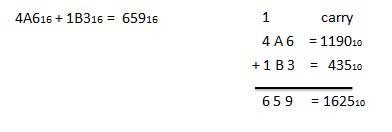
Onaltılık Toplama
Aşağıdaki onaltılık toplama tablosu, Onaltılık toplamayı işlemenize büyük ölçüde yardımcı olacaktır.
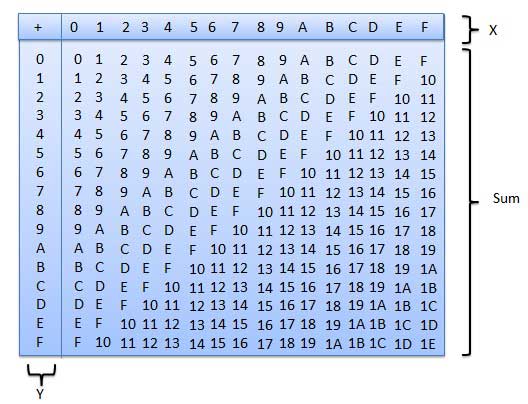
Bu tabloyu kullanmak için, bu örnekte kullanılan talimatları izleyin - A 16 ve 5 16 ekleyin . X sütununda A'yı bulun ve ardından Y sütununda 5'i bulun. Bu iki sütunun kesiştiği 'toplam' alanındaki nokta, iki sayının toplamıdır.
A16 + 516 = F16.Örnek - Toplama
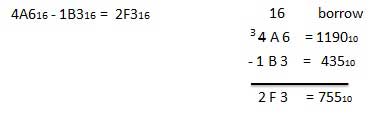
Onaltılık Çıkarma
Onaltılık sayıların çıkarılması, diğer herhangi bir sayı sistemindeki sayıların çıkarılmasıyla aynı kuralları izler. Tek varyasyon ödünç alınan sayıdadır. Ondalık sistemde, 10 10'luk bir grup ödünç alırsınız . İkili sistemde, 2 10 kişilik bir grup ödünç alırsınız . Onaltılık sistemde 16 10 kişilik bir grup ödünç alırsınız .
Örnek - Çıkarma
Boole Cebri, dijital (mantık) devreleri analiz etmek ve basitleştirmek için kullanılır. Yalnızca ikili sayıları, yani 0 ve 1'i kullanır.Binary Algebra veya logical Algebra. Boole cebri tarafından icat edildiGeorge Boole 1854'te.
Boole Cebirinde Kural
Boole cebirinde kullanılan önemli kurallar aşağıdadır.
Kullanılan değişken yalnızca iki değere sahip olabilir. YÜKSEK için İkili 1 ve DÜŞÜK için İkili 0.
Bir değişkenin tamamlayıcısı, bir üst çubuk (-) ile temsil edilir. Böylece, B değişkeninin tamamlayıcısı olarak temsil edilir
. Böylece, B = 0 ise = 1 ve B = 1 ise
= 0.
= 1 ve B = 1 ise
= 0.
Değişkenlerin ORing, aralarında bir artı (+) işareti ile temsil edilir. Örneğin A, B, C'nin ORing'i A + B + C olarak temsil edilir.
İki veya daha fazla değişkenin mantıksal AND'si, aralarında ABC gibi bir nokta yazılarak temsil edilir. Bazen nokta, ABC gibi atlanabilir.
Boole Yasaları
Altı tür Boole Yasası vardır.
Değişmeli kanun
Aşağıdaki ifadeyi karşılayan herhangi bir ikili işlem, değişmeli işlem olarak adlandırılır.

Değişim kanunu, değişkenlerin sırasını değiştirmenin bir mantık devresinin çıkışı üzerinde herhangi bir etkisi olmadığını belirtir.
Federal hukuk
Bu yasa, mantık işlemlerinin gerçekleştirilme sırasının etkilerinin aynı olması nedeniyle alakasız olduğunu belirtir.

Dağıtım kanunu
Dağıtım yasası aşağıdaki koşulu belirtir.

VE hukuk
Bu yasalar AND işlemini kullanır. Bu nedenleAND kanunlar.
OR kanunu
Bu yasalar, OR işlemini kullanır. Bu nedenleOR kanunlar.
TERS YASASI
Bu yasa, DEĞİL işlemini kullanır. Ters çevirme yasası, bir değişkenin çift ters çevrilmesinin orijinal değişkenin kendisiyle sonuçlandığını belirtir.

Önemli Boole Teoremleri
Aşağıda birkaç önemli boole Teoremi bulunmaktadır.
| Boole fonksiyonu / teoremleri | Açıklama |
|---|---|
Boolean İşlevleri |
Boolean Fonksiyonlar ve İfadeler, K-Map ve NAND Gates gerçekleştirme |
De Morgan Teoremleri |
De Morgan Teoremi 1 ve Teorem 2 |
Mantık kapıları, herhangi bir dijital sistemin temel yapı taşlarıdır. Bir veya birden fazla girişi ve yalnızca bir çıkışı olan elektronik devredir. Girdi ve çıktı arasındaki ilişki bircertain logic. Buna dayanarak, mantık geçitleri AND geçidi, OR geçidi, NOT kapısı vb. Olarak adlandırılır.
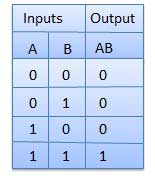
AND Kapısı
AND işlemi gerçekleştiren bir devre şekilde gösterilmiştir. N girişi (n> = 2) ve bir çıkışı vardır.

Mantık diyagramı

Doğruluk tablosu
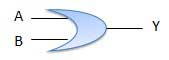
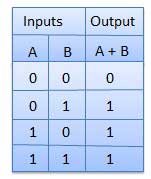
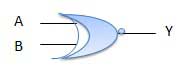
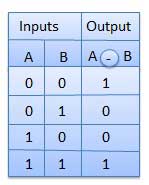
OR Kapısı
OR işlemi gerçekleştiren bir devre şekilde gösterilmiştir. N girişi (n> = 2) ve bir çıkışı vardır.

Mantık diyagramı
Doğruluk tablosu
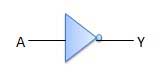
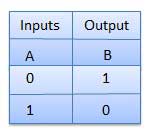
DEĞİL kapısı
NOT kapısı olarak da bilinir Inverter. Bir A girişi ve bir Y çıkışı vardır.

Mantık diyagramı
Doğruluk tablosu
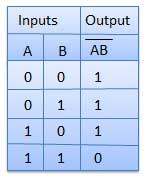
NAND Kapısı
NOT-AND işlemi NAND işlemi olarak bilinir. N girişi (n> = 2) ve bir çıkışı vardır.

Mantık diyagramı

Doğruluk tablosu
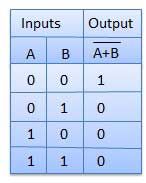
NOR Kapısı
NOT-OR işlemi NOR işlemi olarak bilinir. N girişi (n> = 2) ve bir çıkışı vardır.

Mantık diyagramı

Doğruluk tablosu
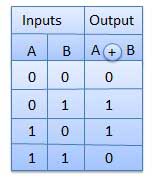
XOR Kapısı
XOR veya Ex-OR kapısı, özel bir kapı türüdür. Yarım toplayıcı, dolu toplayıcı ve çıkarıcıda kullanılabilir. Özel-OR geçidi, EX-OR geçidi veya bazen X-OR geçidi olarak kısaltılır. N girişi (n> = 2) ve bir çıkışı vardır.
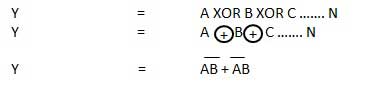
Mantık diyagramı

Doğruluk tablosu
XNOR Kapısı
XNOR kapısı özel bir kapı türüdür. Yarım toplayıcı, dolu toplayıcı ve çıkarıcıda kullanılabilir. Özel-NOR geçidi, EX-NOR geçidi veya bazen X-NOR geçidi olarak kısaltılır. N girişi (n> = 2) ve bir çıkışı vardır.
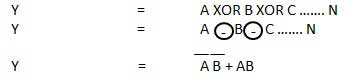
Mantık diyagramı
Doğruluk tablosu
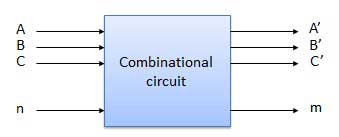
Birleşimsel devre, örneğin kodlayıcı, kod çözücü, çoklayıcı ve çoklayıcı gibi devrede farklı kapıları birleştirdiğimiz bir devredir. Kombinasyonel devrelerin bazı özellikleri aşağıdaki gibidir:
Birleşimsel devrenin herhangi bir andaki çıkışı, yalnızca giriş terminallerinde bulunan seviyelere bağlıdır.
Kombinasyonel devre herhangi bir hafıza kullanmaz. Önceki giriş durumu, devrenin mevcut durumu üzerinde herhangi bir etkiye sahip değildir.
Bir kombinasyonel devre n sayıda girişe ve m sayıda çıkışa sahip olabilir.
Blok diyagramı
Birkaç önemli kombinasyonel devreyi aşağıdaki gibi detaylandıracağız.
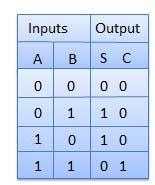
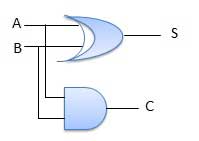
Yarım Toplayıcı
Yarım toplayıcı, iki giriş ve iki çıkışa sahip kombinasyonel bir mantık devresidir. Yarım toplayıcı devre, iki adet tek bitli ikili sayı A ve B eklemek için tasarlanmıştır. Bu, ikisinin eklenmesi için temel yapı taşıdır.singlebit numaraları. Bu devrenin iki çıkışı vardırcarry ve sum.
Blok diyagramı

Doğruluk tablosu
Devre şeması
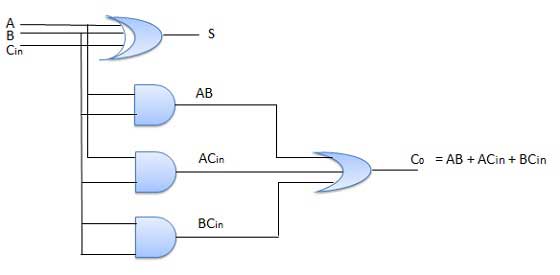
Tam Toplayıcı
Yarım Toplayıcı devresinin dezavantajının üstesinden gelmek için tam toplayıcı geliştirilmiştir. İki adet bir bitlik sayı A ve B ekleyebilir ve c taşıyabilir. Tam toplayıcı, üç girişli ve iki çıkışlı bir kombinasyon devresidir.
Blok diyagramı

Doğruluk tablosu
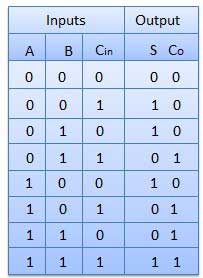
Devre şeması
N-Bit Paralel Toplayıcı
Tam Toplayıcı, bir taşıma girişi ile birlikte yalnızca iki tek basamaklı ikili sayı ekleyebilir. Fakat pratikte, bir bitten çok daha uzun olan ikili sayılar eklememiz gerekir. İki n-bit ikili sayı eklemek için n-bit paralel toplayıcı kullanmamız gerekir. Basamaklı olarak bir dizi tam toplayıcı kullanır. Önceki tam toplayıcının taşıma çıkışı, sonraki tam toplayıcının girişini taşımak için bağlanır.
4 Bit Paralel Toplayıcı
Blok diyagramda, A 0 ve B 0 , dört bitlik kelime A ve B'nin LSB'sini temsil eder. Dolayısıyla Tam Toplayıcı-0 en düşük aşamadır. Dolayısıyla, C girişi kalıcı olarak 0 yapılmıştır. Bağlantıların geri kalanı, n-bit paralel toplayıcınınkilerle tamamen aynıdır, Şekil 2'de gösterilmiştir. Dört bitlik paralel toplayıcı çok yaygın bir mantık devresidir.
Blok diyagramı

N-Bit Paralel Çıkarıcı
Çıkarma, çıkarılacak sayının 1 veya 2'nin tamamlayıcısı alınarak gerçekleştirilebilir. Örneğin, çıkarmayı (AB), B'yi A'ya 1'ler veya 2'ler tümleyicileri ekleyerek gerçekleştirebiliriz. Bu, ikili çıkarma işlemini gerçekleştirmek için ikili bir toplayıcı kullanabileceğimiz anlamına gelir.
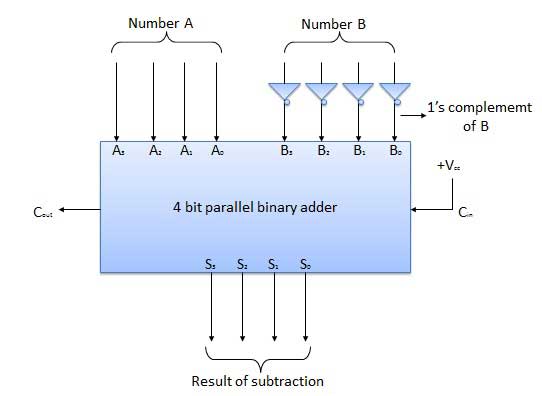
4 Bit Paralel Çıkarıcı
Çıkarılacak sayı (B) önce 1'in tümleyicisini elde etmek için eviricilerden geçirilir. 4-bit toplayıcı daha sonra çıkarmayı üretmek için A ve 2'nin B tamamlayıcısını ekler. S 3 S 2 S 1 S 0 ikili çıkarma (AB) ve taşıma çıkış C sonucunu temsil dışarı sonucu polaritesini temsil eder. Eğer A> B ise Cout = 0 ve ikili formun (AB) sonucu o zaman C out = 1 ve sonuç 2'nin tümleyen formundadır.
Blok diyagramı
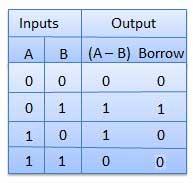
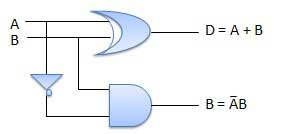
Yarım Çıkarıcılar
Yarım çıkarıcı, iki girişli ve iki çıkışlı (fark ve ödünç) bir kombinasyon devredir. Girişteki iki ikili bit arasındaki farkı üretir ve ayrıca 1'in ödünç alınıp alınmadığını belirtmek için bir çıktı (Borç) üretir. Çıkarmada (AB), A, Minuend bit ve B, Subtrahend bit olarak adlandırılır.
Doğruluk tablosu
Devre şeması
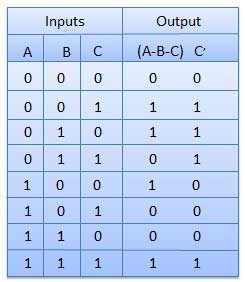
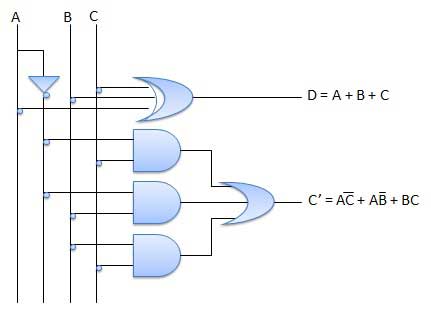
Tam Çıkarıcılar
Yarım çıkarıcının dezavantajı, tam çıkarıcı ile aşılır. Tam çıkarıcı, üç giriş A, B, C ve iki çıkış D ve C 'olan bir birleşimsel devredir. A 'eksilen', B 'çıkarılmış', C önceki aşama tarafından üretilen 'borçlanma', D fark çıktısı ve C 'borçlanma çıktısıdır.
Doğruluk tablosu
Devre şeması
Çoklayıcılar
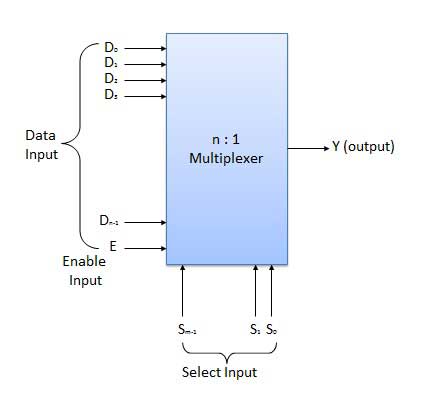
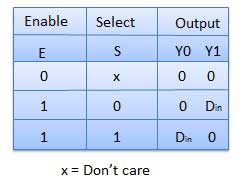
Çoklayıcı, özel bir kombinasyonel devredir. N-veri girişi, bir çıkış ve 2m = n ile m seçme girişi vardır. N adet veri girişinden birini seçip çıkışa yönlendiren dijital bir devredir. N girişten birinin seçimi, seçilen girişler tarafından yapılır. Seçilen girişlerde uygulanan dijital koda bağlı olarak, n veri kaynağından biri seçilir ve tek çıkış Y'ye iletilir. E, kademelendirme için yararlı olan strobe veya etkinleştirme girişi olarak adlandırılır. Genellikle aktif bir düşük terminaldir, yani düşük olduğunda gerekli işlemi gerçekleştireceği anlamına gelir.
Blok diyagramı
Çoklayıcıların birden fazla çeşidi vardır
- 2: 1 çoklayıcı
- 4: 1 çoklayıcı
- 16: 1 çoklayıcı
- 32: 1 çoklayıcı
Blok Şeması
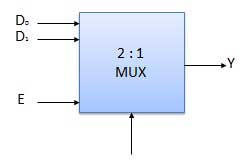
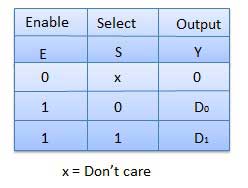
Doğruluk tablosu
Çoğullama çözücüler
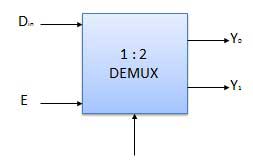
Bir çoğullama çözücü, bir çoğullayıcının ters işlemini gerçekleştirir, yani bir girişi alır ve bunu birkaç çıktıya dağıtır. Sadece bir giriş, n çıkış, m seçim girişi vardır. Bir seferde, seçilen hatlar tarafından yalnızca bir çıkış hattı seçilir ve giriş, seçilen çıkış hattına iletilir. Bir çoğullayıcı çözücü, şekil 2'de gösterildiği gibi tek kutuplu çok yollu bir anahtara eşdeğerdir.
Çoğullayıcının birden fazla çeşidi vardır.
- 1: 2 çoğullama çözücü
- 1: 4 çoğullama çözücü
- 1: 16 çoğullama çözücü
- 1: 32 çoğullama çözücü
Blok diyagramı
Doğruluk tablosu
Kod çözücü
Bir kod çözücü, kombinasyonel bir devredir. N girişe ve maksimum m = 2n çıkışa sahiptir. Kod çözücü, herhangi bir veri girişi olmayan bir çoğullama çözücüyle aynıdır. Bir kodlayıcının tam tersi işlemleri gerçekleştirir.
Blok diyagramı

Dekoder örnekleri aşağıdadır.
- Kod dönüştürücüler
- BCD'den yedi segment kod çözücüye
- Nixie tüp kod çözücüleri
- Röle aktüatörü
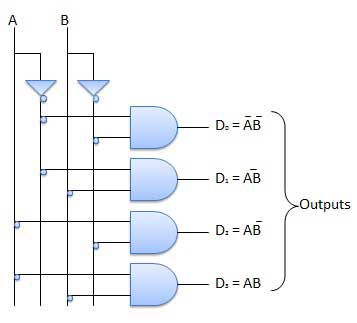
2 ila 4 Hatlı Kod Çözücü
2 ila 4 hatlı kod çözücünün blok diyagramı şekil 2'de gösterilmiştir. A ve B, D ila D'nin dört çıkış olduğu iki giriştir. Hakikat tablosu bir kod çözücünün işlemlerini açıklar. Her çıkışın yalnızca belirli bir girdi kombinasyonu için 1 olduğunu gösterir.
Blok diyagramı

Doğruluk tablosu

Mantık Devresi
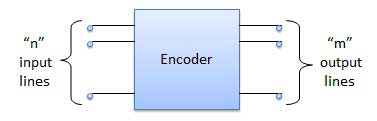
Kodlayıcı
Kodlayıcı, kod çözücünün ters çalışmasını gerçekleştirmek için tasarlanmış bir birleşimsel devredir. Bir kodlayıcının n adet giriş satırı ve m adet çıkış satırı vardır. Bir kodlayıcı, dijital giriş numarasına karşılık gelen bir m bit ikili kod üretir. Kodlayıcı bir n girişli dijital kelimeyi kabul eder ve bunu bir m bitlik başka bir dijital kelimeye dönüştürür.
Blok diyagramı
Kodlayıcı örnekleri aşağıdadır.
- Öncelikli kodlayıcılar
- BCD kodlayıcıya ondalık
- Sekizli - ikili kodlayıcı
- Onaltılık - ikili kodlayıcı
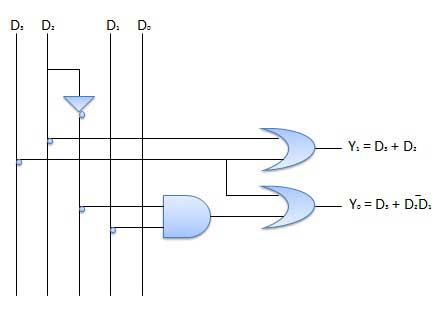
Öncelikli Kodlayıcı
Bu özel bir kodlayıcı türüdür. Giriş satırlarına öncelik verilir. İki veya daha fazla giriş hattı aynı anda 1 ise, en yüksek önceliğe sahip giriş satırı dikkate alınacaktır. Dört giriş D 0 , D 1 , D 2 , D 3 ve iki çıkış Y 0 , Y 1 vardır . Dört girişten D 3 en yüksek önceliğe ve D 0 en düşük önceliğe sahiptir. Bu, D 3 = 1 ise diğer girişlerden bağımsız olarak Y 1 Y 1 = 11 anlamına gelir . Benzer şekilde D 3 = 0 ve D 2 = 1 ise, diğer girişlerden bağımsız olarak Y 1 Y 0 = 10 olur.
Blok diyagramı

Doğruluk tablosu
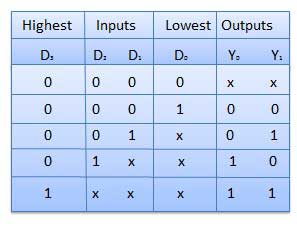
Mantık Devresi
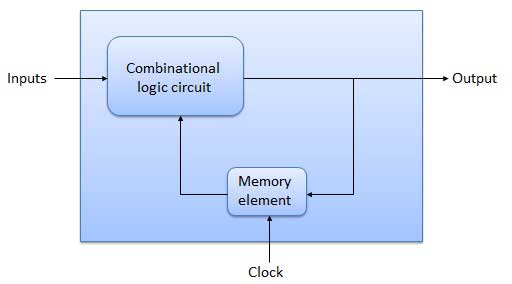
Kombinasyonel devre herhangi bir hafıza kullanmaz. Dolayısıyla, önceki giriş durumunun devrenin mevcut durumu üzerinde herhangi bir etkisi yoktur. Ancak sıralı devrenin hafızası vardır, bu nedenle çıktı girişe göre değişebilir. Bu tür devreler önceki girişi, çıkışı, saati ve bir bellek elemanını kullanır.
Blok diyagramı
Takla
Flip flop, genellikle girdilerini örnekleyen ve çıktılarını sürekli olarak değil yalnızca belirli anlarda değiştiren sıralı bir devredir. Flip flop'un, mandallar gibi seviye tetiklenmesinden ziyade kenara duyarlı olduğu veya kenar tetiklendiği söylenir.
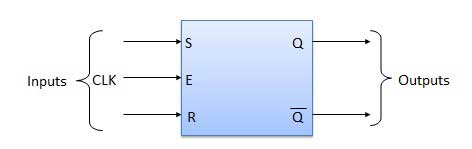
SR Flip Flop
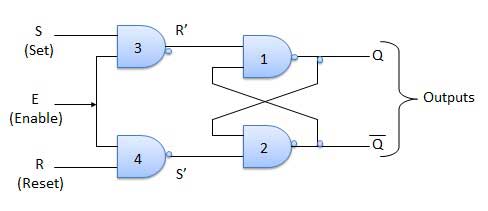
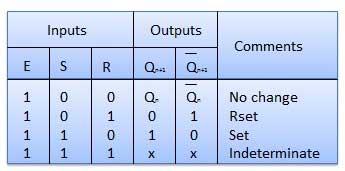
Temelde ek bir NAND geçitlerini kullanan SR mandalıdır. enablegiriş. Aynı zamanda seviye tetiklemeli SR-FF olarak da adlandırılır. Bunun için, çıkıştaki devre ancak ve ancak etkinleştirme girişi (E) aktif hale getirilirse gerçekleşir. Kısacası, bu devre E = 1 ise bir SR mandalı olarak çalışacaktır ancak E = 0 ise çıkışta değişiklik olmayacaktır.
Blok Şeması
Devre şeması
Doğruluk tablosu
Operasyon
| SN | Durum | Operasyon |
|---|---|---|
| 1 | S = R = 0 : No change | S = R = 0 ise, NAND kapıları 3 ve 4'ün çıkışı 1 olmaya zorlanır. Dolayısıyla, R 've S', 1'e eşit olacaktır. S 've R', NAND geçitlerini kullanan temel SR mandalının girişi olduğundan, çıkışların durumunda hiçbir değişiklik olmayacaktır. |
| 2 | S = 0, R = 1, E = 1 | S = 0 olduğundan, NAND-3'ün çıktısı yani R '= 1 ve E = 1 NAND-4'ün çıktısı yani S' = 0'dır. Dolayısıyla Q n + 1 = 0 ve Q n + 1 bar = 1. Bu sıfırlama koşuludur. |
| 3 | S = 1, R = 0, E = 1 | NAND-3 çıkışı yani R '= 0 ve NAND-4 çıkışı yani S' = 1. Dolayısıyla, SR NAND mandalının çıkışı Q n + 1 = 1 ve Q n + 1 bar = 0'dır. Bu, sıfırlama koşuludur. |
| 4 | S = 1, R = 1, E = 1 | S = 1, R = 1 ve E = 1 olarak, NAND geçitleri 3 ve 4'ün her ikisi de 0'dır, yani S '= R' = 0. Dolayısıyla Race durum temel NAND mandalında ortaya çıkacaktır. |
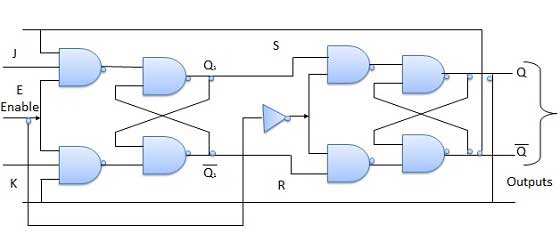
Master Slave JK Flip Flop
Ana bağımlı JK FF, ikinci çıkıştan birinci girişe kadar geri beslemeli iki SR FF'nin bir kademesidir. Master, tetiklenen pozitif bir seviyedir. Ancak inverterin saat hattındaki varlığı nedeniyle, slave negatif seviyeye cevap verecektir. Bu nedenle saat = 1 (pozitif seviye) olduğunda, master aktiftir ve slave pasiftir. Oysa saat = 0 (düşük seviye) olduğunda, bağımlı aktiftir ve master devre dışıdır.
Devre şeması
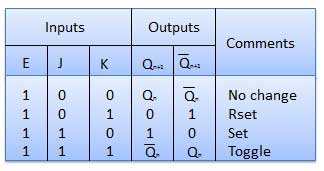
Doğruluk tablosu
Operasyon
| SN | Durum | Operasyon |
|---|---|---|
| 1 | J = K = 0 (No change) | Saat = 0 olduğunda, bağımlı aktif hale gelir ve master devre dışı kalır. Ancak S ve R girişleri değişmediğinden, bağımlı çıkışlar da değişmeden kalacaktır. Bu nedenle, J = K = 0 ise çıkışlar değişmeyecektir. |
| 2 | J = 0 and K = 1 (Reset) | Saat = 1 - Ana etkin, bağımlı devre dışı. Bu nedenle, master'ın çıkışları Q 1 = 0 ve Q 1 bar = 1 olur. Bu, S = 0 ve R = 1 anlamına gelir. Saat = 0 - Bağımlı aktif, ana devre dışı. Bu nedenle slave'in çıkışları Q = 0 ve Q bar = 1 olur. Yine saat = 1 - Ana etkin, bağımlı devre dışı. Bu nedenle, değiştirilen Q = 0 ve Q bar = 1 çıkışları ana bilgisayara geri beslendiğinde bile, çıkışı Q1 = 0 ve Q1 bar = 1 olacaktır. Bu, S = 0 ve R = 1 anlamına gelir. Dolayısıyla saat = 0 ve slave aktif hale geldiğinde, slave'in çıkışları Q = 0 ve Q bar = 1 olarak kalacaktır. Böylece Master slave'den kararlı bir çıkış elde ederiz. |
| 3 | J = 1 and K = 0 (Set) | Saat = 1 - Ana etkin, bağımlı devre dışı. Bu nedenle, ana birimin çıkışları Q 1 = 1 ve Q 1 bar = 0 olur. Bu, S = 1 ve R = 0 anlamına gelir. Saat = 0 - Bağımlı aktif, ana devre dışı. Bu nedenle slave'in çıkışları Q = 1 ve Q bar = 0 olur. Yine saat = 1 - o zaman slave'in çıkışlarının Q = 1 ve Q bar = 0'a stabilize edildiği gösterilebilir. |
| 4 | J = K = 1 (Toggle) | Saat = 1 - Ana etkin, bağımlı devre dışı. Master'ın çıktıları değişecek. Yani S ve R de tersine çevrilecek. Saat = 0 - Bağımlı aktif, ana devre dışı. Slave'in çıktıları değişecektir. Bu değiştirilen çıktılar ana girişlere geri döndürülür. Ancak saat = 0 olduğundan, ana birim hala devre dışıdır. Dolayısıyla bu değişen çıktılara cevap vermez. Bu, koşul etrafında yarışa yol açan çoklu geçişi önler. Master slave flip flop, koşula bağlı yarıştan kaçınacaktır. |
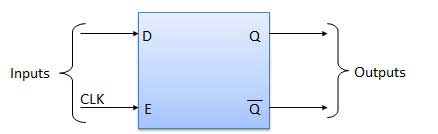
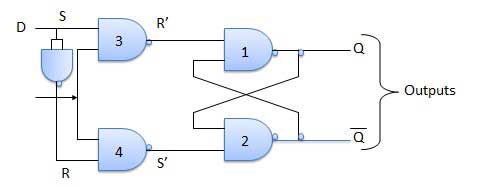
Gecikmeli Flip Flop / D Flip Flop
Gecikmeli Flip Flop veya D Flip Flop, S ve R girişleri arasına bağlı bir NAND invertörlü basit geçitli SR mandaldır. Yalnızca bir girişi vardır. Giriş verileri, bir süre sonra çıktıda görünüyor. İ / p ve o / p arasındaki bu veri gecikmesi nedeniyle, buna gecikmeli flip flop denir. S ve R, NAND invertör sayesinde birbirinin tamamlayıcısı olacaktır. Dolayısıyla S = R = 0 veya S = R = 1, bu giriş koşulları asla görünmeyecektir. Bu problem SR = 00 ve SR = 1 koşulları ile önlenir.
Blok Şeması
Devre şeması
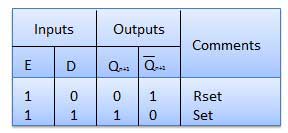
Doğruluk tablosu
Operasyon
| SN | Durum | Operasyon |
|---|---|---|
| 1 | E = 0 | Mandal devre dışı bırakıldı. Dolayısıyla çıktıda değişiklik yok. |
| 2 | E = 1 and D = 0 | E = 1 ve D = 0 ise, S = 0 ve R = 1'dir. Dolayısıyla, mevcut durumdan bağımsız olarak, sonraki durum Q n + 1 = 0 ve Q n + 1 bar = 1'dir. Bu, sıfırlama koşuludur. |
| 3 | E = 1 and D = 1 | E = 1 ve D = 1 ise, S = 1 ve R = 0. Bu , mevcut durumdan bağımsız olarak mandalı ve Q n + 1 = 1 ve Q n + 1 bar = 0'ı ayarlayacaktır . |
Flip Flop / T Flip Flop'u aç / kapat
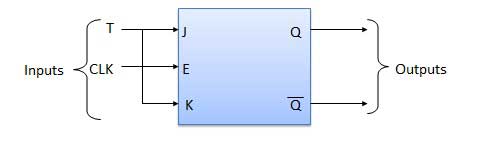
Geçişli flip flop, temelde J ve K terminallerinin kalıcı olarak birbirine bağlı olduğu bir JK flip flop'tur. Yalnızca ile gösterilen girişi vardırTSembol Diyagramında gösterildiği gibi. Pozitif kenarla tetiklenen T flip flop için sembol Blok Diyagramda gösterilmiştir.
Sembol Diyagramı
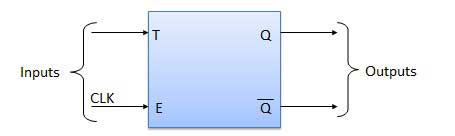
Blok Şeması
Doğruluk tablosu
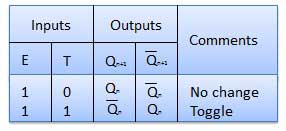
Operasyon
| SN | Durum | Operasyon |
|---|---|---|
| 1 | T = 0, J = K = 0 | Çıktı Q ve Q çubuğu değişmeyecek |
| 2 | T = 1, J = K = 1 | Çıkış, saat sinyalinin her ön kenarına karşılık gelecek şekilde değişir. |
Flip-flop, dijital verileri depolamak için kullanılabilen 1 bitlik bir hafıza hücresidir. Depolama kapasitesini bit sayısı olarak artırmak için, bir grup flip-flop kullanmalıyız. Böyle bir flip-flop grubu,Register. n-bit register oluşacak n flip-flop sayısı ve bir n-bit kelime.
Bir kayıt defterindeki ikili veri, kayıt içinde bir flip-flop'tan diğerine taşınabilir. Bu tür veri aktarımlarına izin veren kayıtlar,shift registers. Bir vardiya yazmacının dört işlem modu vardır.
- Seri Giriş Seri Çıkış
- Seri Giriş Paralel Çıkış
- Paralel Giriş Seri Çıkışı
- Paralel Giriş Paralel Çıkış
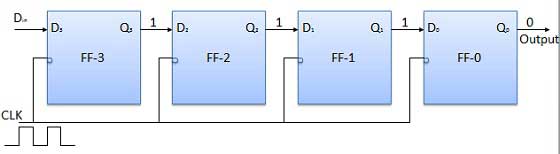
Seri Giriş Seri Çıkış
Tüm flip-flopların başlangıçta sıfırlama koşulunda olmasına izin verin, yani Q 3 = Q 2 = Q 1 = Q 0 = 0. Eğer kütüğe dört bitlik bir ikili sayı 1 1 1 1 girişi yapılırsa, bu sayı uygulananDinLSB bitinin ilk uygulandığı bit. FF-3'ün D girişi, yani D 3 , seri veri girişine bağlanırDin. FF-3'ün çıkışı, yani Q 3 , bir sonraki flip-flopun girişine, yani D 2 vb. Bağlanır .
Blok Şeması
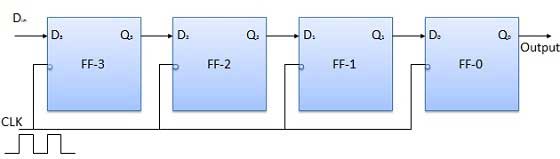
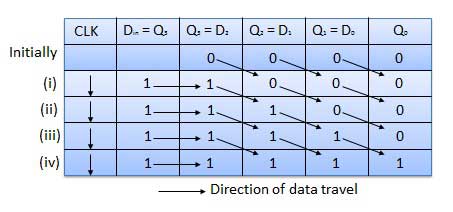
Operasyon
Saat sinyalinin uygulanmasından önce, Q let 3 Q 2 Q 1 Q 0 D'ye girilecek = 0000 ve LSB sayının biraz uygulamak içinde . Yani D in = D 3 = 1. Saati uygulayın. Saatin ilk düşen kenarında, FF-3 ayarlanır ve yazmaçta saklanan kelime Q 3 Q 2 Q 1 Q 0 = 1000'dir.
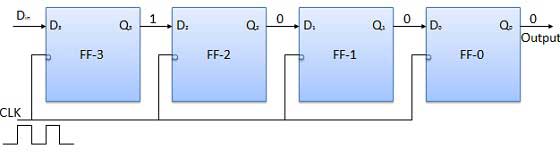
D yanındaki bit uygula içinde . Yani D in = 1. Saatin bir sonraki negatif kenarı çarptığı anda, FF-2 ayarlanacak ve saklanan kelime Q 3 Q 2 Q 1 Q 0 = 1100 olarak değişecektir .
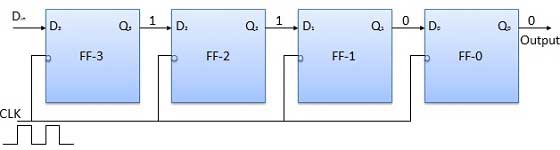
Uygula sonraki bit D 1 yani saklanmasına içinde . Saat darbesini uygulayın. Üçüncü negatif saat kenarı çarptığı anda, FF-1 ayarlanacak ve çıktı Q 3 Q 2 Q 1 Q 0 = 1110 olarak değiştirilecektir.
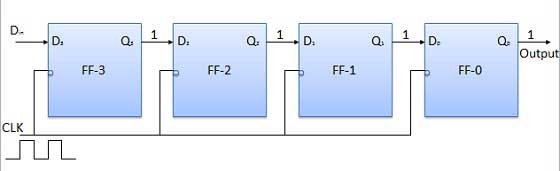
Benzer şekilde D in = 1 ve dördüncü negatif saat kenarı geldiğinde, kayıtta saklanan kelime Q 3 Q 2 Q 1 Q 0 = 1111'dir.
Doğruluk tablosu
Dalga biçimleri

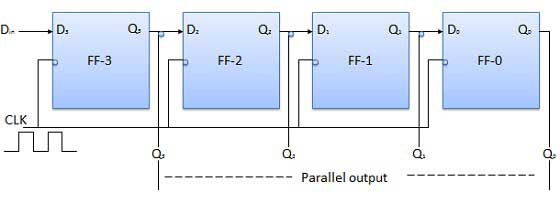
Seri Giriş Paralel Çıkış
Bu tür işlemlerde, veriler seri olarak girilir ve paralel olarak çıkarılır.
Veriler parça parça yüklenir. Veriler yüklendiği sürece çıkışlar devre dışı bırakılır.
Veri yüklemesi tamamlanır tamamlanmaz, tüm flip-floplar gerekli verilerini içerir, çıktılar etkinleştirilir, böylece yüklenen tüm veriler aynı anda tüm çıkış hatları üzerinden kullanılabilir hale gelir.
Dört bitlik bir sözcüğü yüklemek için 4 saat döngüsü gereklidir. Bu nedenle SIPO modunun çalışma hızı SISO modunun hızıyla aynıdır.
Blok Şeması
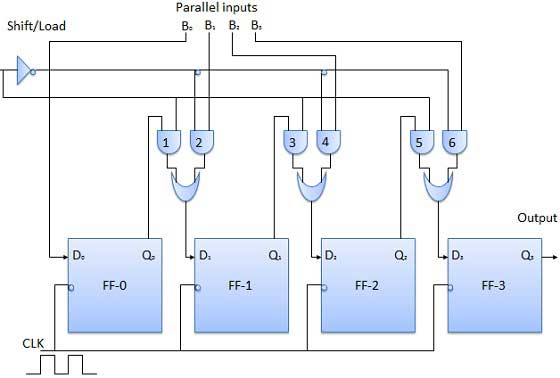
Paralel Giriş Seri Çıkışı (PISO)
Veri bitleri paralel olarak girilir.
Aşağıda gösterilen devre, dört bitlik bir paralel giriş seri çıkış yazmacıdır.
Önceki Flip Flop'un çıkışı, bir kombinasyonel devre yoluyla bir sonrakinin girişine bağlanır.
İkili giriş kelimesi B 0 , B 1 , B 2 , B 3 , aynı kombinasyonel devre ile uygulanır.
Bu devrenin çalışabileceği iki mod vardır - vites modu veya yük modu.
Yükleme modu
Kaydırma / yük çubuğu hattı düşük (0) olduğunda, AND geçidi 2, 4 ve 6 aktif hale gelirler, B 1 , B 2 , B 3 bitlerini karşılık gelen flip-floplara geçirirler. Saatin alçaktan giden kenarında, B 0 , B 1 , B 2 , B 3 ikili girişi karşılık gelen flip-floplara yüklenecektir. Böylece paralel yükleme gerçekleşir.
Vardiya modu
Vites / yükleme çubuğu hattı düşük olduğunda (1), AND kapısı 2, 4 ve 6 devre dışı kalır. Bu nedenle verilerin paralel yüklenmesi imkansız hale gelir. Ancak AND kapısı 1,3 ve 5 aktif hale gelir. Bu nedenle, saat darbelerinin uygulanmasıyla verilerin soldan sağa biraz kaydırılması. Böylece paralel olarak seri çıkış işlemi gerçekleşir.
Blok Şeması
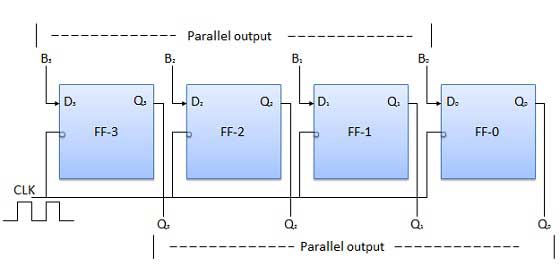
Paralel Giriş Paralel Çıkış (PIPO)
Bu modda, 4 bitlik ikili giriş B 0 , B 1 , B 2 , B 3 , dört flip-flopun sırasıyla D 0 , D 1 , D 2 , D 3 veri girişlerine uygulanır . Negatif bir saat kenarı uygulanır uygulanmaz, giriş ikili bitleri aynı anda flip-floplara yüklenecektir. Yüklenen bitler aynı anda çıktı tarafında görünecektir. Tüm bitleri yüklemek için yalnızca saat darbesi gereklidir.
Blok Şeması
Çift Yönlü Vardiya Kaydı
İkili bir sayı sola bir sıra kaydırılırsa, bu orijinal sayının 2 ile çarpılmasına eşdeğerdir. Benzer şekilde, eğer bir ikili sayı sağa bir sıra kaydırılırsa, orijinal sayıyı 2'ye bölmekle eşdeğerdir.
Bu nedenle, verilen ikili sayıyı çarpmak ve bölmek için kaydırma yazmacını kullanmak istiyorsak, veriyi sola veya sağa hareket ettirebilmeliyiz.
Böyle bir sicil, çift yönlü kayıt olarak adlandırılır. Şekil 2'de dört bitlik bir çift yönlü kaydırma yazmacı gösterilmektedir.
Seri sağa kaydırma veri girişi DR ve bir mod seçme girişi (M) ile birlikte seri sol kaydırma veri girişi DL olmak üzere iki seri giriş vardır.
Blok Şeması
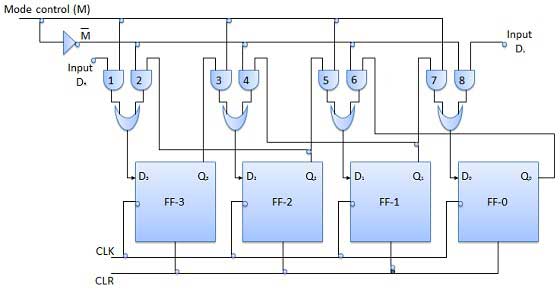
Operasyon
| SN | Durum | Operasyon |
|---|---|---|
| 1 | With M = 1 − Shift right operation | M = 1 ise, AND kapıları 1, 3, 5 ve 7 etkinleştirilirken kalan AND geçitleri 2, 4, 6 ve 8 devre dışı bırakılır. D R'deki veriler, saat darbelerinin uygulanmasında FF-3'ten FF-0'a birer birer sağa doğru kaydırılır. Böylece M = 1 ile seri sağa kaydırma işlemini elde ederiz. |
| 2 | With M = 0 − Shift left operation | Mod kontrolü M 0'a bağlandığında, AND kapıları 2, 4, 6 ve 8 etkinleştirilirken 1, 3, 5 ve 7 devre dışı bırakılır. D L' deki veriler, saat darbelerinin uygulanmasında FF-0'dan FF-3'e birer birer sola kaydırılır. Böylece M = 0 ile seri sağa kaydırma işlemini elde ederiz. |
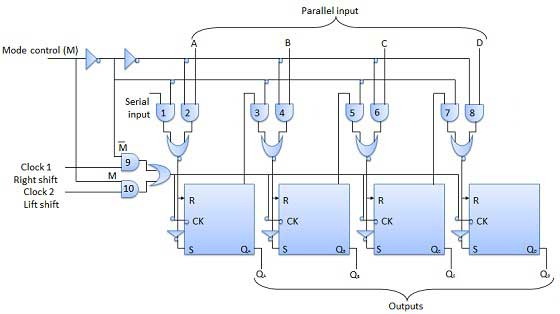
Universal Shift Register
Veriyi yalnızca bir yönde kaydırabilen bir kaydırma yazmacı, tek yönlü kaydırma yazmacı olarak adlandırılır. Veriyi her iki yönde kaydırabilen bir kaydırma yazmacı, çift yönlü kaydırma yazmacı olarak adlandırılır. Aynı mantığı uygulamak, veriyi her iki yönde kaydırabilen ve aynı zamanda paralel olarak yükleyebilen bir kaydırma yazmacı evrensel bir kaydırma yazmacı olarak bilinir. Kaydırma yazmacı aşağıdaki işlemi gerçekleştirebilir -
- Paralel yükleme
- Sola Kaydırma
- Sağa kaydırma
Mod kontrol girişi paralel yükleme işlemi için mantık 1'e bağlanırken, seri kaydırma için 0'a bağlanır. Toprağa bağlı mod kontrol pimi ile, evrensel kaydırma yazmacı çift yönlü bir yazmaç görevi görür. Seri sol işlem için giriş, şekilde gösterilen AND geçit-1'e giden seri girişe uygulanır. Sağa kaydırma işlemi için ise, seri giriş D girişine uygulanır.
Blok Şeması
Sayaç sıralı bir devredir. Sayıcı darbeleri saymak için kullanılan dijital bir devre bilinen sayaçtır. Sayaç, parmak arası terliklerin en geniş uygulamasıdır. Saat sinyali uygulanmış bir flip-flop grubudur. Sayaçlar iki tiptedir.
- Eşzamansız veya dalgalanma sayaçları.
- Senkron sayaçlar.
Eşzamansız veya dalgalanma sayaçları
2 bitlik dalgalanma sayacının mantık diyagramı şekilde gösterilmiştir. Geçişli (T) flip-flop kullanılıyor. Ancak JK flip-flop'unu J ve K kalıcı olarak mantık 1'e bağlıyken de kullanabiliriz. Flip-flop A'nın saat girişine harici saat uygulanır ve Q A çıkışı sonraki flip-flop'un saat girişine uygulanır yani FF-B.
Mantıksal Diyagram
Operasyon
| SN | Durum | Operasyon |
|---|---|---|
| 1 | Initially let both the FFs be in the reset state | Başlangıçta Q B Q A = 00 |
| 2 | After 1st negative clock edge | İlk negatif saat kenarı uygulanır uygulanmaz, FF-A değişecek ve Q A 1'e eşit olacaktır. Q A , FF-B'nin saat girişine bağlanır. Q A , 0'dan 1'e değiştiğinden, FF-B tarafından pozitif saat kenarı olarak değerlendirilir. Q B'de değişiklik yoktur çünkü FF-B, FF tarafından tetiklenen bir negatif kenardır. Q B Q A = 01 ilk saat darbesinden sonra. |
| 3 | After 2nd negative clock edge | İkinci negatif saat kenarının gelişinde, FF-A tekrar değişir ve Q A = 0. Q A'daki değişiklik, FF-B için negatif bir saat kenarı görevi görür. Yani aynı zamanda değişecek ve Q B 1 olacaktır. Q B Q A = İkinci saat darbesinden sonra 10. |
| 4 | After 3rd negative clock edge | 3. negatif saat kenarının gelişinde, FF-A tekrar değişir ve Q A , 0'dan 1 olur. Bu olumlu bir değişim olduğundan, FF-B buna yanıt vermez ve pasif kalır. Yani Q B değişmez ve 1'e eşit olmaya devam eder. Q B Q A = üçüncü saat darbesinden sonra 11. |
| 5 | After 4th negative clock edge | 4. negatif saat kenarının gelişinde, FF-A tekrar değişir ve Q A , 0'dan 1 olur. Q A'daki bu negatif değişiklik, FF-B için saat darbesi görevi görür. Bu nedenle Q B'yi 1'den 0'a değiştirir. Q B Q A = dördüncü saat darbesinden sonra 00. |
Doğruluk tablosu
Senkron sayaçlar
"Saat" darbeleri bir sayaçtaki tüm flip-floplara aynı anda uygulanırsa, bu tür bir sayaç senkron sayaç olarak adlandırılır.
2-bit Senkron yukarı sayaç
FF-A'nın J A ve K A girişleri mantık 1'e bağlıdır. Dolayısıyla, FF-A geçişli bir flip-flop olarak çalışacaktır. J B ve K B girişleri Q A'ya bağlanır .
Mantıksal Diyagram

Operasyon
| SN | Durum | Operasyon |
|---|---|---|
| 1 | Initially let both the FFs be in the reset state | Başlangıçta Q B Q A = 00. |
| 2 | After 1st negative clock edge | İlk negatif saat kenarı uygulanır uygulanmaz, FF-A değişecek ve Q A , 0'dan 1'e değişecektir. Ancak negatif saat kenarının uygulandığı anda, Q A , J B = K B = 0. Dolayısıyla FF-B durumunu değiştirmeyecektir. Yani Q B 0 olarak kalacak. Q B Q A = 01 ilk saat darbesinden sonra. |
| 3 | After 2nd negative clock edge | İkinci negatif saat kenarının gelişinde, FF-A tekrar geçiş yapar ve Q A 1'den 0'a değişir. Ama bu anda Q A 1 idi. Yani J B = K B = 1 ve FF-B değişecek. Dolayısıyla Q B , 0'dan 1'e değişir. Q B Q A = İkinci saat darbesinden sonra 10. |
| 4 | After 3rd negative clock edge | Üçüncü düşen saat kenarının uygulanması üzerine, FF-A 0'dan 1'e geçecektir ancak FF-B için durum değişikliği olmayacaktır. Q B Q A = üçüncü saat darbesinden sonra 11. |
| 5 | After 4th negative clock edge | Sonraki saat darbesi uygulandığında, Q B de 1'den 0'a değişeceğinden Q A 1'den 0'a değişecektir. Q B Q A = dördüncü saat darbesinden sonra 00. |
Sayaçların sınıflandırılması
Saymanın ilerleme şekline bağlı olarak, eşzamanlı veya eşzamansız sayaçlar aşağıdaki şekilde sınıflandırılır -
- Yukarı sayaçlar
- Aşağı sayaçlar
- Yukarı / Aşağı sayaçları
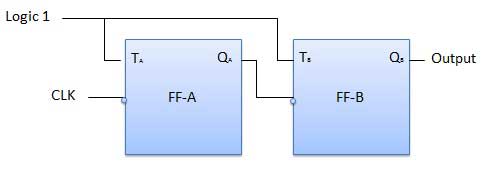
YUKARI / AŞAĞI Sayacı
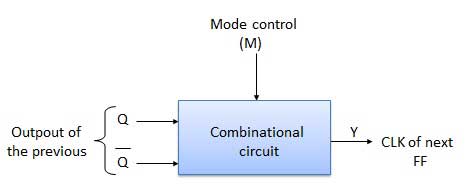
Yukarı sayaç ve aşağı sayaç, bir YUKARI / AŞAĞI sayacı elde etmek için birleştirilir. Yukarı veya aşağı modunu seçmek için bir mod kontrol (M) girişi de sağlanmıştır. Yukarı / aşağı işlemin gerçekleştirilmesi için her iki flip-flop çifti arasında bir kombinasyon devresinin tasarlanması ve kullanılması gerekir.
- Yukarı / aşağı sayaç tipi
- YUKARI / AŞAĞI dalgalanma sayaçları
- YUKARI / AŞAĞI senkron sayaç
UP/DOWN Ripple Counters
In the UP/DOWN ripple counter all the FFs operate in the toggle mode. So either T flip-flops or JK flip-flops are to be used. The LSB flip-flop receives clock directly. But the clock to every other FF is obtained from (Q = Q bar) output of the previous FF.
UP counting mode (M=0) − The Q output of the preceding FF is connected to the clock of the next stage if up counting is to be achieved. For this mode, the mode select input M is at logic 0 (M=0).
DOWN counting mode (M=1) − If M = 1, then the Q bar output of the preceding FF is connected to the next FF. This will operate the counter in the counting mode.
Example
3-bit binary up/down ripple counter.
3-bit − hence three FFs are required.
UP/DOWN − So a mode control input is essential.
For a ripple up counter, the Q output of preceding FF is connected to the clock input of the next one.
For a ripple up counter, the Q output of preceding FF is connected to the clock input of the next one.
For a ripple down counter, the Q bar output of preceding FF is connected to the clock input of the next one.
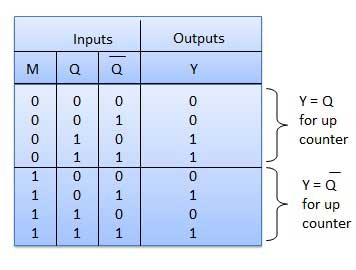
Let the selection of Q and Q bar output of the preceding FF be controlled by the mode control input M such that, If M = 0, UP counting. So connect Q to CLK. If M = 1, DOWN counting. So connect Q bar to CLK.
Block Diagram
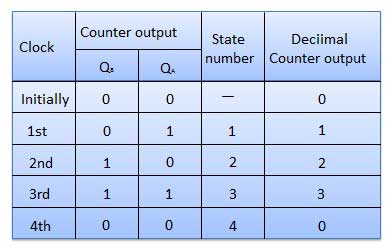
Truth Table
Operation
| S.N. | Condition | Operation |
|---|---|---|
| 1 | Case 1 − With M = 0 (Up counting mode) | If M = 0 and M bar = 1, then the AND gates 1 and 3 in fig. will be enabled whereas the AND gates 2 and 4 will be disabled. Hence QA gets connected to the clock input of FF-B and QB gets connected to the clock input of FF-C. These connections are same as those for the normal up counter. Thus with M = 0 the circuit work as an up counter. |
| 2 | Case 2: With M = 1 (Down counting mode) | If M = 1, then AND gates 2 and 4 in fig. are enabled whereas the AND gates 1 and 3 are disabled. Hence QA bar gets connected to the clock input of FF-B and QB bar gets connected to the clock input of FF-C. These connections will produce a down counter. Thus with M = 1 the circuit works as a down counter. |
Modulus Counter (MOD-N Counter)
The 2-bit ripple counter is called as MOD-4 counter and 3-bit ripple counter is called as MOD-8 counter. So in general, an n-bit ripple counter is called as modulo-N counter. Where, MOD number = 2n.
Type of modulus
- 2-bit up or down (MOD-4)
- 3-bit up or down (MOD-8)
- 4-bit up or down (MOD-16)
Application of counters
- Frequency counters
- Digital clock
- Time measurement
- A to D converter
- Frequency divider circuits
- Digital triangular wave generator.
A memory is just like a human brain. It is used to store data and instruction. Computer memory is the storage space in computer where data is to be processed and instructions required for processing are stored.
The memory is divided into large number of small parts. Each part is called a cell. Each location or cell has a unique address which varies from zero to memory size minus one.
For example if computer has 64k words, then this memory unit has 64 * 1024 = 65536 memory location. The address of these locations varies from 0 to 65535.
Memory is primarily of two types
Internal Memory − cache memory and primary/main memory
External Memory − magnetic disk / optical disk etc.
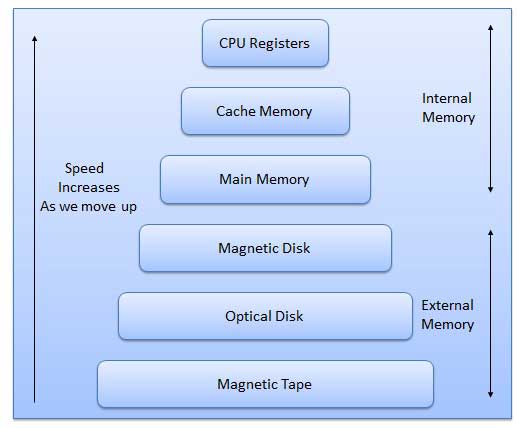
Characteristics of Memory Hierarchy are following when we go from top to bottom.
- Capacity in terms of storage increases.
- Cost per bit of storage decreases.
- Frequency of access of the memory by the CPU decreases.
- Access time by the CPU increases.
RAM
A RAM constitutes the internal memory of the CPU for storing data, program and program result. It is read/write memory. It is called random access memory (RAM).
Since access time in RAM is independent of the address to the word that is, each storage location inside the memory is as easy to reach as other location & takes the same amount of time. We can reach into the memory at random & extremely fast but can also be quite expensive.
RAM is volatile, i.e. data stored in it is lost when we switch off the computer or if there is a power failure. Hence, a backup uninterruptible power system (UPS) is often used with computers. RAM is small, both in terms of its physical size and in the amount of data it can hold.
RAM is of two types
- Static RAM (SRAM)
- Dynamic RAM (DRAM)
Static RAM (SRAM)
The word static indicates that the memory retains its contents as long as power remains applied. However, data is lost when the power gets down due to volatile nature. SRAM chips use a matrix of 6-transistors and no capacitors. Transistors do not require power to prevent leakage, so SRAM need not have to be refreshed on a regular basis.
Because of the extra space in the matrix, SRAM uses more chips than DRAM for the same amount of storage space, thus making the manufacturing costs higher.
Static RAM is used as cache memory needs to be very fast and small.
Dynamic RAM (DRAM)
DRAM, unlike SRAM, must be continually refreshed in order for it to maintain the data. This is done by placing the memory on a refresh circuit that rewrites the data several hundred times per second. DRAM is used for most system memory because it is cheap and small. All DRAMs are made up of memory cells. These cells are composed of one capacitor and one transistor.
ROM
ROM stands for Read Only Memory. The memory from which we can only read but cannot write on it. This type of memory is non-volatile. The information is stored permanently in such memories during manufacture.
A ROM, stores such instruction as are required to start computer when electricity is first turned on, this operation is referred to as bootstrap. ROM chip are not only used in the computer but also in other electronic items like washing machine and microwave oven.
Following are the various types of ROM −
MROM (Masked ROM)
The very first ROMs were hard-wired devices that contained a pre-programmed set of data or instructions. These kind of ROMs are known as masked ROMs. It is inexpensive ROM.
PROM (Programmable Read Only Memory)
PROM is read-only memory that can be modified only once by a user. The user buys a blank PROM and enters the desired contents using a PROM programmer. Inside the PROM chip there are small fuses which are burnt open during programming. It can be programmed only once and is not erasable.
EPROM (Erasable and Programmable Read Only Memory)
The EPROM can be erased by exposing it to ultra-violet light for a duration of upto 40 minutes. Usually, an EPROM eraser achieves this function. During programming an electrical charge is trapped in an insulated gate region. The charge is retained for more than ten years because the charge has no leakage path. For erasing this charge, ultra-violet light is passed through a quartz crystal window (lid). This exposure to ultra-violet light dissipates the charge. During normal use the quartz lid is sealed with a sticker.
EEPROM (Electrically Erasable and Programmable Read Only Memory)
The EEPROM is programmed and erased electrically. It can be erased and reprogrammed about ten thousand times. Both erasing and programming take about 4 to 10 ms (millisecond). In EEPROM, any location can be selectively erased and programmed. EEPROMs can be erased one byte at a time, rather than erasing the entire chip. Hence, the process of re-programming is flexible but slow.
Serial Access Memory
Sequential access means the system must search the storage device from the beginning of the memory address until it finds the required piece of data. Memory device which supports such access is called a Sequential Access Memory or Serial Access Memory. Magnetic tape is an example of serial access memory.
Direct Access Memory
Direct access memory or Random Access Memory, refers to conditions in which a system can go directly to the information that the user wants. Memory device which supports such access is called a Direct Access Memory. Magnetic disks, optical disks are examples of direct access memory.
Cache Memory
Cache memory is a very high speed semiconductor memory which can speed up CPU. It acts as a buffer between the CPU and main memory. It is used to hold those parts of data and program which are most frequently used by CPU. The parts of data and programs, are transferred from disk to cache memory by operating system, from where CPU can access them.
Advantages
- Cache memory is faster than main memory.
- It consumes less access time as compared to main memory.
- It stores the program that can be executed within a short period of time.
- It stores data for temporary use.
Disadvantages
- Cache memory has limited capacity.
- It is very expensive.
Virtual memory is a technique that allows the execution of processes which are not completely available in memory. The main visible advantage of this scheme is that programs can be larger than physical memory. Virtual memory is the separation of user logical memory from physical memory.
This separation allows an extremely large virtual memory to be provided for programmers when only a smaller physical memory is available. Following are the situations, when entire program is not required to be loaded fully in main memory.
User written error handling routines are used only when an error occurred in the data or computation.
Certain options and features of a program may be used rarely.
Many tables are assigned a fixed amount of address space even though only a small amount of the table is actually used.
The ability to execute a program that is only partially in memory would counter many benefits.
Less number of I/O would be needed to load or swap each user program into memory.
A program would no longer be constrained by the amount of physical memory that is available.
Each user program could take less physical memory, more programs could be run the same time, with a corresponding increase in CPU utilization and throughput.
Auxiliary Memory
Auxiliary memory is much larger in size than main memory but is slower. It normally stores system programs, instruction and data files. It is also known as secondary memory. It can also be used as an overflow/virtual memory in case the main memory capacity has been exceeded. Secondary memories cannot be accessed directly by a processor. First the data/information of auxiliary memory is transferred to the main memory and then that information can be accessed by the CPU. Characteristics of Auxiliary Memory are following −
Non-volatile memory − Data is not lost when power is cut off.
Reusable − The data stays in the secondary storage on permanent basis until it is not overwritten or deleted by the user.
Reliable − Data in secondary storage is safe because of high physical stability of secondary storage device.
Convenience − With the help of a computer software, authorised people can locate and access the data quickly.
Capacity − Secondary storage can store large volumes of data in sets of multiple disks.
Cost − It is much lesser expensive to store data on a tape or disk than primary memory.
Microprocessing unit is synonymous to central processing unit, CPU used in traditional computer. Microprocessor (MPU) acts as a device or a group of devices which do the following tasks.
- communicate with peripherals devices
- provide timing signal
- direct data flow
- perform computer tasks as specified by the instructions in memory
8085 Microprocessor
The 8085 microprocessor is an 8-bit general purpose microprocessor which is capable to address 64k of memory. This processor has forty pins, requires +5 V single power supply and a 3-MHz single-phase clock.
Block Diagram
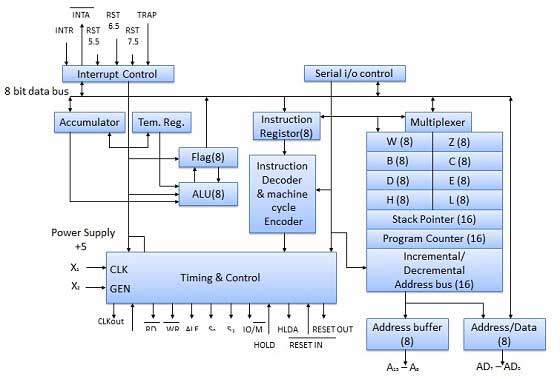
ALU
The ALU perform the computing function of microprocessor. It includes the accumulator, temporary register, arithmetic & logic circuit & and five flags. Result is stored in accumulator & flags.
Block Diagram

Accumulator
It is an 8-bit register that is part of ALU. This register is used to store 8-bit data & in performing arithmetic & logic operation. The result of operation is stored in accumulator.
Diagram
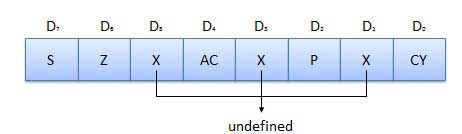
Flags
Flags are programmable. They can be used to store and transfer the data from the registers by using instruction. The ALU includes five flip-flops that are set and reset according to data condition in accumulator and other registers.
S (Sign) flag − After the execution of an arithmetic operation, if bit D7 of the result is 1, the sign flag is set. It is used to signed number. In a given byte, if D7 is 1 means negative number. If it is zero means it is a positive number.
Z (Zero) flag − The zero flag is set if ALU operation result is 0.
AC (Auxiliary Carry) flag − In arithmetic operation, when carry is generated by digit D3 and passed on to digit D4, the AC flag is set. This flag is used only internally BCD operation.
P (Parity) flag − After arithmetic or logic operation, if result has even number of 1s, the flag is set. If it has odd number of 1s, flag is reset.
C (Carry) flag − If arithmetic operation result is in a carry, the carry flag is set, otherwise it is reset.
Register section
It is basically a storage device and transfers data from registers by using instructions.
Stack Pointer (SP) − The stack pointer is also a 16-bit register which is used as a memory pointer. It points to a memory location in Read/Write memory known as stack. In between execution of program, sometime data to be stored in stack. The beginning of the stack is defined by loading a 16-bit address in the stack pointer.
Program Counter (PC) − This 16-bit register deals with fourth operation to sequence the execution of instruction. This register is also a memory pointer. Memory location have 16-bit address. It is used to store the execution address. The function of the program counter is to point to memory address from which next byte is to be fetched.
Storage registers − These registers store 8-bit data during a program execution. These registers are identified as B, C, D, E, H, L. They can be combined as register pair BC, DE and HL to perform some 16 bit operations.
Time and Control Section
This unit is responsible to synchronize Microprocessor operation as per the clock pulse and to generate the control signals which are necessary for smooth communication between Microprocessor and peripherals devices. The RD bar and WR bar signals are synchronous pulses which indicates whether data is available on the data bus or not. The control unit is responsible to control the flow of data between microprocessor, memory and peripheral devices.
PIN diagram
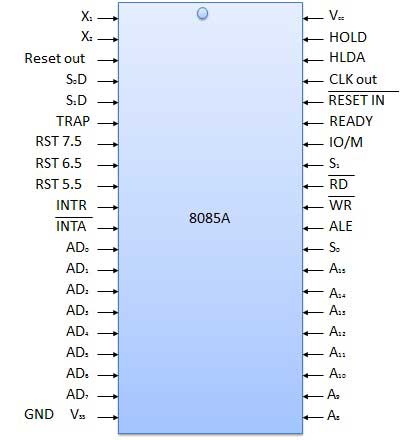
All the signal can be classified into six groups
| S.N. | Group | Description |
|---|---|---|
| 1 | Address bus | The 8085 microprocessor has 8 signal line, A15 - A8 which are uni directional and used as a high order address bus. |
| 2 | Data bus | The signal line AD7 - AD0 are bi-directional for dual purpose. They are used as low order address bus as well as data bus. |
| 3 | Control signal and Status signal | Control Signal RD bar − It is a read control signal (active low). If it is active then memory read the data. WR bar − It is write control signal (active low). It is active when written into selected memory. Status signal ALU (Address Latch Enable) − When ALU is high. 8085 microprocessor use address bus. When ALU is low. 8085 microprocessor is use data bus. IO/M bar − This is a status signal used to differentiate between i/o and memory operations. When it is high, it indicate an i/o operation and when it is low, it indicate memory operation. S1 and S0 − These status signals, similar to i/o and memory bar, can identify various operations, but they are rarely used in small system. |
| 4 | Power supply and frequency signal | Vcc − +5v power supply. Vss − ground reference. X, X − A crystal is connected at these two pins. The frequency is internally divided by two operate system at 3-MHz, the crystal should have a frequency of 6-MHz. CLK out − This signal can be used as the system clock for other devices. |
| 5 | Externally initiated signal | INTR (i/p) − Interrupt request. INTA bar (o/p) − It is used as acknowledge interrupt. TRAP (i/p) − This is non maskable interrupt and has highest priority. HOLD (i/p) − It is used to hold the executing program. HLDA (o/p) − Hold acknowledge. READY (i/p) − This signal is used to delay the microprocessor read or write cycle until a slow responding peripheral is ready to accept or send data. RESET IN bar − When the signal on this pin goes low, the program counter is set to zero, the bus are tri-stated, & MPU is reset. RESET OUT − This signal indicate that MPU is being reset. The signal can be used to reset other devices. RST 7.5, RST 6.5, RST 5.5 (Request interrupt) − It is used to transfer the program control to specific memory location. They have higher priority than INTR interrupt. |
| 6 | Serial I/O ports | The 8085 microprocessor has two signals to implement the serial transmission serial input data and serial output data. |
Instruction Format
Each instruction is represented by a sequence of bits within the computer. The instruction is divided into group of bits called field. The way instruction is expressed is known as instruction format. It is usually represented in the form of rectangular box. The instruction format may be of the following types.
Variable Instruction Formats
These are the instruction formats in which the instruction length varies on the basis of opcode & address specifiers. For Example, VAX instruction vary between 1 and 53 bytes while X86 instruction vary between 1 and 17 bytes.
Format

Advantage
These formats have good code density.
Drawback
These instruction formats are very difficult to decode and pipeline.
Fixed Instruction Formats
In this type of instruction format, all instructions are of same size. For Example, MIPS, Power PC, Alpha, ARM.
Format

Advantage
They are easy to decode & pipeline.
Drawback
They don't have good code density.
Hybrid Instruction Formats
In this type of instruction formats, we have multiple format length specified by opcode. For example, IBM 360/70, MIPS 16, Thumb.
Format

Advantage
These compromise between code density & instruction of these type are very easy to decode.
Addressing Modes
Addressing mode provides different ways for accessing an address to given data to a processor. Operated data is stored in the memory location, each instruction required certain data on which it has to operate. There are various techniques to specify address of data. These techniques are called Addressing Modes.
Direct addressing mode − In the direct addressing mode, address of the operand is given in the instruction and data is available in the memory location which is provided in instruction. We will move this data in desired location.
Indirect addressing mode − In the indirect addressing mode, the instruction specifies a register which contain the address of the operand. Both internal RAM and external RAM can be accessed via indirect addressing mode.
Immediate addressing mode − In the immediate addressing mode, direct data is given in the operand which move the data in accumulator. It is very fast.
Relative addressing mode − In the relative address mode, the effective address is determined by the index mode by using the program counter in stead of general purpose processor register. This mode is called relative address mode.
Index addressing mode − In the index address mode, the effective address of the operand is generated by adding a content value to the contents of the register. This mode is called index address mode.