Lý thuyết mạng - Đáp ứng của mạch AC
Trong chương trước, chúng ta đã thảo luận về đáp ứng quá độ và đáp ứng trạng thái ổn định của mạch DC. Trong chương này, chúng ta hãy thảo luận vềresponse of AC circuit. Các khái niệm về cả phản ứng nhất thời và phản ứng trạng thái ổn định, mà chúng ta đã thảo luận trong chương trước, cũng sẽ hữu ích ở đây.
Tìm phản hồi của mạch RL loạt
Hãy xem xét những điều sau series RL circuit biểu đồ.

Trong mạch trên, switch đã được giữ openđến t = 0 và nó đã được đóng ở t = 0 . Vậy nguồn điện áp xoay chiều có hiệu điện thế cực đại là V m vôn không mắc vào đoạn mạch RL nối tiếp tính đến thời điểm này. Do đó, cóno initial current chảy qua cuộn cảm.
Sơ đồ mạch, khi switch trong closed vị trí, được hiển thị trong hình sau.
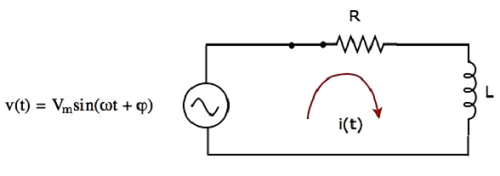
Bây giờ, dòng điện i (t) chạy trong toàn mạch, vì nguồn điện áp xoay chiều có điện áp cực đại là V m vôn được nối với đoạn mạch RL nối tiếp.
Ta biết rằng dòng điện i (t) chạy qua đoạn mạch trên sẽ có hai số hạng, một số hạng biểu thị phần quá độ và số hạng khác biểu thị trạng thái dừng.
Về mặt toán học, nó có thể được biểu diễn dưới dạng
$ i (t) = i_ {Tr} (t) + i_ {ss} (t) $Equation 1
Ở đâu,
$ i_ {Tr} (t) $ là phản ứng quá độ của dòng điện chạy qua đoạn mạch.
$ i_ {ss} (t) $ là đáp ứng ở trạng thái ổn định của dòng điện chạy qua mạch.
Trong chương trước, chúng ta đã nhận được phản ứng quá độ của dòng điện chạy qua đoạn mạch RL nối tiếp. Nó có dạng $ Ke ^ {- \ lgroup \ frac {t} {\ tau} \ rgroup} $.
Thay thế $ i_ {Tr} (t) = Ke ^ {- \ lgroup \ frac {t} {\ tau} \ rgroup} $ trong Phương trình 1.
$ i (t) = Ke ^ {- \ lgroup \ frac {t} {\ tau} \ rgroup} + i_ {ss} (t) $Equation 2
Tính toán trạng thái ổn định hiện tại
Nếu tín hiệu hình sin được áp dụng làm đầu vào cho mạch điện tuyến tính, thì nó tạo ra đầu ra trạng thái ổn định, cũng là sinusoidal signal. Cả tín hiệu hình sin đầu vào và đầu ra sẽ có cùng tần số, nhưng biên độ và góc pha khác nhau.
Chúng ta có thể tính toán đáp ứng trạng thái ổn định của một mạch điện, khi nó được kích thích bởi nguồn điện áp hình sin sử dụng Laplace Transform approach.
Sơ đồ mạch miền s, khi switch trong closed vị trí, được hiển thị trong hình sau.
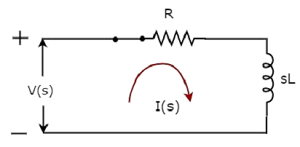
Trong mạch trên, tất cả các đại lượng và thông số được biểu diễn bằng s-domain. Đây là các phép biến đổi Laplace của các đại lượng và tham số trong miền thời gian.
Các Transfer function của đoạn mạch trên là
$$ H (s) = \ frac {I (s)} {V (s)} $$
$$ \ Rightarrow H (s) = \ frac {1} {Z (s)} $$
$$ \ Rightarrow H (s) = \ frac {1} {R + sL} $$
Thay $ s = j \ omega $ vào phương trình trên.
$$ H (j \ omega) = \ frac {1} {R + j \ omega L} $$
Magnitude of $ \ mathbf {\ mathit {H (j \ omega)}} $ là
$$ | H (j \ omega) | = \ frac {1} {\ sqrt {R ^ 2 + {\ omega} ^ 2} L ^ 2} $$
Phase angle of $ \ mathbf {\ mathit {H (j \ omega)}} $ là
$$ \ angle H (j \ omega) = -tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup $$
Chúng tôi sẽ nhận được steady state current $ i_ {ss} (t) $ bằng cách thực hiện hai bước sau:
Nhân điện áp đỉnh của điện áp hình sin đầu vào và độ lớn của $ H (j \ omega) $.
Thêm góc pha của điện áp hình sin đầu vào và $ H (j \ omega) $.
Các steady state current $ i_ {ss} (t) $ sẽ là
$$ i_ {ss} (t) = \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2}} sin \ lgroup \ omega t + \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup $$
Thay giá trị của $ i_ {ss} (t) $ trong Phương trình 2.
$ i (t) = Ke ^ {- \ lgroup \ frac {t} {\ tau} \ rgroup} + \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2}} sin \ lgroup \ omega t + \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup $Equation 3
Ta biết rằng không có dòng điện ban đầu trong mạch. Do đó, thay t = 0 & i (t) = 0 trong Công thức 3 để tìm giá trị của hằng số, K.
$$ 0 = Ke ^ {- \ lgroup \ frac {0} {\ tau} \ rgroup} + \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2}} sin \ lgroup \ omega (0) + \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup $$
$$ \ Rightarrow 0 = K + \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2}} sin \ lgroup \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup $$
$$ \ Rightarrow K = - \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2}} sin \ lgroup \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup $$
Thay giá trị của K trong Công thức 3.
$ i (t) = - \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2}} sin \ lgroup \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup e ^ {- \ lgroup \ frac {t} {\ tau} \ rgroup} + \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2 }} sin \ lgroup \ omega t + \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup $Equation 4
Công thức 4 biểu diễn cường độ dòng điện chạy qua đoạn mạch RL nối tiếp, khi nó được kích thích bởi nguồn điện áp hình sin. Nó có hai điều khoản. Số hạng đầu tiên và số hạng thứ hai lần lượt thể hiện phản ứng nhất thời và phản ứng trạng thái ổn định của dòng điện.
Chúng ta có thể neglect the first termcủa phương trình 4 vì giá trị của nó sẽ nhỏ hơn rất nhiều. Vì vậy, kết quả dòng điện chạy qua mạch sẽ là
$$ i (t) = \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2}} sin \ lgroup \ omega t + \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup $$
Nó chỉ chứa steady state term. Do đó, chúng ta chỉ có thể tìm thấy phản ứng trạng thái ổn định của mạch xoay chiều và bỏ qua phản ứng quá độ của nó.