วงจรดิจิทัล - เครื่อง จำกัด สถานะ
เรารู้ว่าวงจรเรียงลำดับแบบซิงโครนัสเปลี่ยน (มีผลต่อ) สถานะของมันสำหรับการเปลี่ยนสัญญาณนาฬิกาในเชิงบวก (หรือเชิงลบ) ทุกครั้งตามอินพุต ดังนั้นพฤติกรรมของวงจรเรียงลำดับซิงโครนัสนี้สามารถแสดงในรูปแบบกราฟิกและเรียกว่าstate diagram.
วงจรลำดับซิงโครนัสเรียกอีกอย่างว่า Finite State Machine(FSM) หากมีจำนวนรัฐ จำกัด FSM มีสองประเภท
- เครื่องรัฐ Mealy
- มัวร์สเตทแมชชีน
ตอนนี้ให้เราพูดคุยเกี่ยวกับเครื่องสถานะทั้งสองนี้ทีละเครื่อง
เครื่องรัฐ Mealy
Finite State Machine ถูกกล่าวว่าเป็นเครื่องจักรสถานะ Mealy หากเอาต์พุตขึ้นอยู่กับอินพุตปัจจุบันและสถานะปัจจุบัน block diagram ของเครื่องสถานะ Mealy แสดงในรูปต่อไปนี้
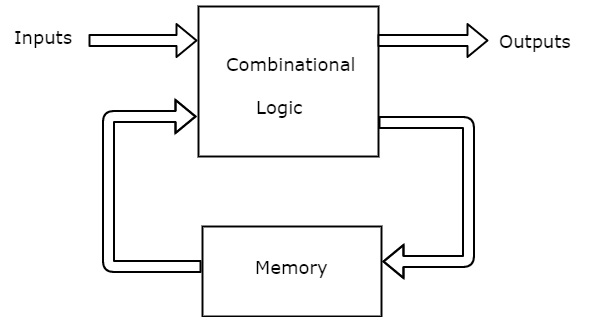
ดังแสดงในรูปมีสองส่วนที่มีอยู่ในเครื่องสถานะ Mealy สิ่งเหล่านี้คือตรรกะและหน่วยความจำแบบผสมผสาน หน่วยความจำมีประโยชน์ในการจัดเตรียมเอาต์พุตก่อนหน้าบางส่วนหรือบางส่วน(present states) เป็นอินพุตของตรรกะเชิงผสม
ดังนั้นขึ้นอยู่กับอินพุตปัจจุบันและสถานะปัจจุบันเครื่องสถานะ Mealy จะสร้างเอาต์พุต ดังนั้นเอาต์พุตจะใช้ได้เฉพาะกับการเปลี่ยนสัญญาณนาฬิกาที่เป็นบวก (หรือลบ) เท่านั้น
state diagram ของเครื่องสถานะ Mealy แสดงในรูปต่อไปนี้
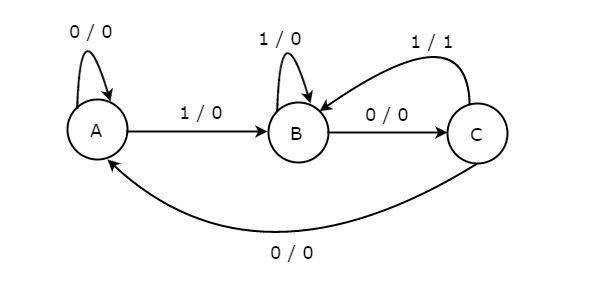
ในรูปด้านบนมีสามสถานะ ได้แก่ A, B & C สถานะเหล่านี้มีป้ายกำกับอยู่ในวงกลมและแต่ละวงกลมจะสอดคล้องกับสถานะเดียว การเปลี่ยนระหว่างสถานะเหล่านี้จะแสดงด้วยเส้นกำกับ นี่คือ 0/0, 1/0 & 1/1 หมายถึงinput / output. ในรูปด้านบนมีการเปลี่ยนสองครั้งจากแต่ละสถานะตามค่าของอินพุต x
โดยทั่วไปจำนวนสถานะที่ต้องการใน Mealy state machine จะน้อยกว่าหรือเท่ากับจำนวนสถานะที่ต้องการใน Moore state machine มีเครื่องสถานะมัวร์ที่เทียบเท่ากันสำหรับเครื่องสถานะ Mealy แต่ละเครื่อง
มัวร์สเตทแมชชีน
Finite State Machine ถูกกล่าวว่าเป็นเครื่องจักรของรัฐมัวร์หากเอาต์พุตขึ้นอยู่กับสถานะปัจจุบันเท่านั้น block diagram ของเครื่อง Moore state แสดงดังรูปต่อไปนี้

ดังแสดงในรูปมีสองส่วนที่มีอยู่ในเครื่องของรัฐมัวร์ สิ่งเหล่านี้คือตรรกะและหน่วยความจำแบบผสมผสาน ในกรณีนี้อินพุตปัจจุบันและสถานะปัจจุบันจะกำหนดสถานะถัดไป ดังนั้นตามสถานะถัดไปเครื่องของรัฐมัวร์จะสร้างผลลัพธ์ ดังนั้นผลลัพธ์จะใช้ได้หลังจากการเปลี่ยนสถานะเท่านั้น
state diagram ของเครื่อง Moore state แสดงดังรูปต่อไปนี้

ในรูปด้านบนมีสี่สถานะ ได้แก่ A, B, C & D สถานะเหล่านี้และผลลัพธ์ตามลำดับจะถูกระบุไว้ในวงกลม ที่นี่เฉพาะค่าอินพุตเท่านั้นที่มีป้ายกำกับในการเปลี่ยนแต่ละครั้ง ในรูปด้านบนมีการเปลี่ยนสองครั้งจากแต่ละสถานะตามค่าของอินพุต x
โดยทั่วไปจำนวนของสถานะที่ต้องการในเครื่องของรัฐมัวร์มากกว่าหรือเท่ากับจำนวนรัฐที่ต้องการในเครื่องสถานะ Mealy มีเครื่องสถานะ Mealy ที่เทียบเท่ากันสำหรับเครื่อง Moore State แต่ละเครื่อง ดังนั้นตามข้อกำหนดเราสามารถใช้หนึ่งในนั้นได้