Регион конвергенции (ROC)
Диапазон изменения σ, для которого сходится преобразование Лапласа, называется областью сходимости.
Свойства ROC преобразования Лапласа
ROC содержит полосы, параллельные оси jω в s-плоскости.

Если x (t) является абсолютно целым и имеет конечную продолжительность, то ROC представляет собой всю s-плоскость.
Если x (t) - правосторонняя последовательность, то ROC: Re {s}> σ o .
Если x (t) левосторонняя последовательность, то ROC: Re {s} <σ o .
Если x (t) - двусторонняя последовательность, то ROC - это комбинация двух областей.
ROC можно объяснить, используя примеры, приведенные ниже:
Example 1: Find the Laplace transform and ROC of $x(t) = e-^{at}u(t)$
$ LT [x (t)] = LT [e - ^ {at} u (t)] = {1 \ over S + a} $
$ Re {} \ gt -a $
$ ROC: Re {s} \ gt> -a $

Example 2: Find the Laplace transform and ROC of $x(t) = e^{at}u(-t)$
$ LT [x (t)] = LT [e ^ {at} u (t)] = {1 \ over Sa} $
$ Re {s} <a $
$ ROC: Re {s} <a $

Example 3: Find the Laplace transform and ROC of $x(t) = e^{-at}u(t)+e^{at}u(-t)$
$ LT [x (t)] = LT [e ^ {- at} u (t) + e ^ {at} u (-t)] = {1 \ over S + a} + {1 \ over Sa} $
Для $ {1 \ over S + a} Re \ {s \} \ gt -a $
Для $ {1 \ over Sa} Re \ {s \} \ lt a $

Ссылаясь на приведенную выше диаграмму, комбинированная область лежит от –a до a. Следовательно,
$ ROC: -a <Re {s} <a $
Причинная связь и стабильность
Чтобы система была причинной, все полюса ее передаточной функции должны быть правой половиной s-плоскости.

Система называется устойчивой, если все полюса ее передаточной функции лежат в левой половине s-плоскости.

Система называется нестабильной, если хотя бы один полюс ее передаточной функции смещен в правую половину s-плоскости.
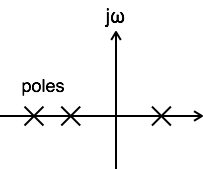
Система называется предельно устойчивой, если хотя бы один полюс ее передаточной функции лежит на оси jω s-плоскости.

ROC базовых функций
| f (t) | F (s) | ROC |
|---|---|---|
| $ u (t) $ | $$ {1 \ over s} $$ | ROC: Re {s}> 0 |
| $ t \, u (t) $ | $$ {1 \ over s ^ 2} $$ | ROC: Re {s}> 0 |
| $ т ^ п \, и (т) $ | $$ {n! \ over s ^ {n + 1}} $$ | ROC: Re {s}> 0 |
| $ e ^ {at} \, u (t) $ | $$ {1 \ over sa} $$ | ROC: Re {s}> a |
| $ e ^ {- at} \, u (t) $ | $$ {1 \ over s + a} $$ | ROC: Re {s}> -a |
| $ e ^ {at} \, u (t) $ | $$ - {1 \ over sa} $$ | ROC: Re {s} <a |
| $ e ^ {- at} \, u (-t) $ | $$ - {1 \ over s + a} $$ | ROC: Re {s} <-a |
| $ t \, e ^ {at} \, u (t) $ | $$ {1 \ over (sa) ^ 2} $$ | ROC: Re {s}> a |
| $ t ^ {n} e ^ {at} \, u (t) $ | $$ {n! \ over (sa) ^ {n + 1}} $$ | ROC: Re {s}> a |
| $ t \, e ^ {- at} \, u (t) $ | $$ {1 \ over (s + a) ^ 2} $$ | ROC: Re {s}> -a |
| $ t ^ n \, e ^ {- at} \, u (t) $ | $$ {n! \ over (s + a) ^ {n + 1}} $$ | ROC: Re {s}> -a |
| $ t \, e ^ {at} \, u (-t) $ | $$ - {1 \ over (sa) ^ 2} $$ | ROC: Re {s} <a |
| $ t ^ n \, e ^ {at} \, u (-t) $ | $$ - {n! \ over (sa) ^ {n + 1}} $$ | ROC: Re {s} <a |
| $ t \, e ^ {- at} \, u (-t) $ | $$ - {1 \ over (s + a) ^ 2} $$ | ROC: Re {s} <-a |
| $ t ^ n \, e ^ {- at} \, u (-t) $ | $$ - {n! \ over (s + a) ^ {n + 1}} $$ | ROC: Re {s} <-a |
| $ e^{-at} \cos \, bt $ | $$ {s+a \over (s+a)^2 + b^2 } $$ | |
| $ e^{-at} \sin\, bt $ | $$ {b \over (s+a)^2 + b^2 } $$ |