การสื่อสารแบบอนาล็อก - คู่มือฉบับย่อ
การสื่อสารด้วยคำนี้เกิดขึ้นจากคำภาษาละตินcommūnicāreซึ่งแปลว่า“ แบ่งปัน” การสื่อสารเป็นขั้นตอนพื้นฐานสำหรับการแลกเปลี่ยนข้อมูล
ตัวอย่างเช่นทารกในเปลสื่อสารด้วยการร้องไห้เมื่อเธอต้องการแม่ เสียงวัวส่งเสียงดังเมื่อตกอยู่ในอันตราย บุคคลสื่อสารด้วยความช่วยเหลือของภาษา การสื่อสารเป็นสะพานในการแบ่งปัน
Communication สามารถกำหนดเป็นกระบวนการแลกเปลี่ยนข้อมูลโดยใช้วิธีการเช่นคำพูดการกระทำสัญญาณ ฯลฯ ระหว่างบุคคลตั้งแต่สองคนขึ้นไป
ส่วนต่างๆของระบบการสื่อสาร
ระบบใด ๆ ที่ให้การสื่อสารประกอบด้วยสามส่วนที่สำคัญและพื้นฐานดังแสดงในรูปต่อไปนี้

Senderคือคนที่ส่งข้อความ อาจเป็นสถานีส่งสัญญาณจากจุดที่ส่งสัญญาณ
Channel เป็นสื่อกลางในการส่งสัญญาณให้ข้อความเดินทางไปถึงปลายทาง
Receiverคือผู้ที่ได้รับข้อความ อาจเป็นสถานีรับสัญญาณที่กำลังรับสัญญาณที่ส่ง
ประเภทของสัญญาณ
การถ่ายทอดข้อมูลด้วยวิธีการบางอย่างเช่นท่าทางเสียงการกระทำ ฯลฯ สามารถเรียกได้ว่าเป็น signaling. ดังนั้นสัญญาณอาจเป็นแหล่งพลังงานที่ส่งข้อมูลบางอย่าง สัญญาณนี้ช่วยในการสร้างการสื่อสารระหว่างผู้ส่งและผู้รับ
แรงกระตุ้นไฟฟ้าหรือคลื่นแม่เหล็กไฟฟ้าซึ่งเดินทางไปได้ไกลเพื่อถ่ายทอดข้อความสามารถเรียกได้ว่าเป็นก signal ในระบบการสื่อสาร
สัญญาณแบ่งออกเป็นสองประเภทหลักคืออนาล็อกและดิจิทัลทั้งนี้ขึ้นอยู่กับลักษณะของสัญญาณ สัญญาณอนาล็อกและดิจิตอลถูกจำแนกเพิ่มเติมดังแสดงในรูปต่อไปนี้

สัญญาณอนาล็อก
สัญญาณแปรผันของเวลาต่อเนื่องซึ่งแสดงถึงปริมาณที่แตกต่างกันของเวลาสามารถเรียกได้ว่าเป็น Analog Signal. สัญญาณนี้เปลี่ยนแปลงไปเรื่อย ๆ ตามเวลาตามค่าของปริมาณที่แสดงให้เห็นในทันที
ตัวอย่าง
ให้เราพิจารณาก๊อกที่เติมถังความจุ 100 ลิตรในหนึ่งชั่วโมง (6.00 น. ถึง 7.00 น.) ส่วนของการเติมน้ำมันในถังจะแตกต่างกันไปตามเวลาที่แตกต่างกัน ซึ่งหมายความว่าหลังจาก 15 นาที (06:15 น.) ส่วนหนึ่งในสี่ของถังจะเต็มในขณะที่เวลา 06:45 น. เติมน้ำมัน 3/4 ของรถถัง
หากเราลองพล็อตปริมาณน้ำที่แตกต่างกันในถังตามช่วงเวลาที่แตกต่างกันจะมีลักษณะดังรูปต่อไปนี้

เนื่องจากผลลัพธ์ที่แสดงในภาพนี้แตกต่างกันไป (เพิ่มขึ้น) ตามเวลาสิ่งนี้ time varying quantityสามารถเข้าใจได้ว่าเป็นปริมาณอนาล็อก สัญญาณที่แสดงถึงเงื่อนไขนี้ด้วยเส้นเอียงในรูปคือไฟล์Analog Signal. การสื่อสารตามสัญญาณอนาล็อกและค่าอนาล็อกเรียกว่าเป็นAnalog Communication.
สัญญาณดิจิตอล
สัญญาณที่มีลักษณะไม่ต่อเนื่องหรือไม่ต่อเนื่องในรูปแบบสามารถเรียกได้ว่าเป็น Digital signal. สัญญาณนี้มีค่าแต่ละค่าซึ่งแสดงแยกกันซึ่งไม่ได้ขึ้นอยู่กับค่าก่อนหน้าราวกับว่าสัญญาณเหล่านี้ได้มาในช่วงเวลานั้น ๆ
ตัวอย่าง
ให้เราพิจารณาห้องเรียนที่มีนักเรียน 20 คน หากมีการวางแผนการเข้าร่วมในหนึ่งสัปดาห์ก็จะมีลักษณะดังรูปต่อไปนี้

ในรูปนี้ค่าต่างๆจะระบุแยกกัน ตัวอย่างเช่นการเข้าร่วมชั้นเรียนในวันพุธคือ 20 ในขณะที่ในวันเสาร์คือ 15 ค่าเหล่านี้สามารถพิจารณาเป็นรายบุคคลและแยกกันหรือแยกจากกันดังนั้นจึงเรียกว่าdiscrete values.
เลขฐานสองที่มีเพียง 1 และ 0 ส่วนใหญ่เรียกว่า digital values. ดังนั้นสัญญาณที่แทน 1s และ 0s จึงเรียกอีกอย่างว่าdigital signals. การสื่อสารตามสัญญาณดิจิทัลและค่าดิจิทัลเรียกว่าเป็นDigital Communication.
สัญญาณเป็นระยะ
สัญญาณแอนะล็อกหรือดิจิทัลใด ๆ ที่ทำซ้ำรูปแบบในช่วงเวลาหนึ่งเรียกว่าเป็น Periodic Signal. สัญญาณนี้มีรูปแบบต่อเนื่องซ้ำ ๆ กันและง่ายต่อการสันนิษฐานหรือคำนวณ
ตัวอย่าง
หากเราพิจารณาเครื่องจักรในอุตสาหกรรมกระบวนการที่เกิดขึ้นทีละอย่างเป็นขั้นตอนต่อเนื่อง ตัวอย่างเช่นการจัดหาและการจัดลำดับวัตถุดิบการประมวลผลวัสดุเป็นแบทช์การบรรจุผลิตภัณฑ์ทีละชิ้น ฯลฯ ทำตามขั้นตอนบางอย่างซ้ำ ๆ
กระบวนการดังกล่าวไม่ว่าจะเป็นอนาล็อกหรือดิจิทัลสามารถแสดงเป็นกราฟิกได้ดังนี้

สัญญาณ Aperiodic
สัญญาณอนาล็อกหรือดิจิตอลใด ๆ ที่ไม่ทำซ้ำรูปแบบในช่วงเวลาหนึ่งเรียกว่าเป็น Aperiodic Signal. สัญญาณนี้มีรูปแบบต่อเนื่อง แต่รูปแบบไม่ซ้ำ นอกจากนี้ยังไม่ใช่เรื่องง่ายที่จะสันนิษฐานหรือคำนวณ
ตัวอย่าง
กิจวัตรประจำวันของบุคคลหากพิจารณาประกอบด้วยงานประเภทต่างๆซึ่งใช้ช่วงเวลาที่แตกต่างกันสำหรับงานที่แตกต่างกัน ช่วงเวลาหรืองานจะไม่เกิดซ้ำอย่างต่อเนื่อง ตัวอย่างเช่นคนเราจะไม่แปรงฟันอย่างต่อเนื่องตั้งแต่เช้าจรดค่ำเช่นกันในช่วงเวลาเดียวกัน
กระบวนการดังกล่าวไม่ว่าจะเป็นอนาล็อกหรือดิจิทัลสามารถแสดงเป็นกราฟิกได้ดังนี้


โดยทั่วไปสัญญาณที่ใช้ในระบบสื่อสารจะเป็นแบบอนาล็อกซึ่งจะถูกส่งในรูปแบบแอนะล็อกหรือแปลงเป็นดิจิทัลแล้วส่งขึ้นอยู่กับข้อกำหนด
สำหรับสัญญาณที่จะส่งไปยังระยะไกลโดยไม่มีผลกระทบจากการรบกวนภายนอกหรือการเพิ่มสัญญาณรบกวนใด ๆ และโดยไม่ต้องจางหายไปสัญญาณนั้นจะต้องผ่านกระบวนการที่เรียกว่า Modulation. ช่วยเพิ่มความแรงของสัญญาณโดยไม่รบกวนพารามิเตอร์ของสัญญาณเดิม
Modulation คืออะไร?
ข้อความที่มีสัญญาณจะต้องถูกส่งไปในระยะไกลและเพื่อที่จะสร้างการสื่อสารที่เชื่อถือได้จำเป็นต้องอาศัยความช่วยเหลือของสัญญาณความถี่สูงซึ่งไม่ควรส่งผลกระทบต่อลักษณะดั้งเดิมของสัญญาณข้อความ
หากมีการเปลี่ยนแปลงลักษณะของสัญญาณข้อความข้อความที่อยู่ในนั้นก็จะเปลี่ยนไปด้วยเช่นกัน ดังนั้นจึงต้องดูแลสัญญาณข้อความ สัญญาณความถี่สูงสามารถเดินทางได้ไกลขึ้นโดยไม่ได้รับผลกระทบจากสิ่งรบกวนภายนอก เราใช้ความช่วยเหลือของสัญญาณความถี่สูงดังกล่าวซึ่งเรียกว่าเป็นcarrier signalเพื่อส่งสัญญาณข้อความของเรา กระบวนการดังกล่าวเรียกง่ายๆว่า Modulation
การมอดูเลตเป็นกระบวนการเปลี่ยนพารามิเตอร์ของสัญญาณพาหะตามค่าทันทีของสัญญาณมอดูเลต
ต้องการการมอดูเลต
สัญญาณเบสแบนด์ไม่เข้ากันสำหรับการส่งโดยตรง สำหรับสัญญาณดังกล่าวหากต้องการเดินทางในระยะทางไกลขึ้นความแรงของสัญญาณจะต้องเพิ่มขึ้นโดยการปรับคลื่นพาหะความถี่สูงซึ่งไม่ส่งผลกระทบต่อพารามิเตอร์ของสัญญาณมอดูเลต
ข้อดีของการมอดูเลต
เสาอากาศที่ใช้ในการส่งสัญญาณจะต้องมีขนาดใหญ่มากหากไม่มีการนำการมอดูเลตมาใช้ ช่วงของการสื่อสารถูก จำกัด เนื่องจากคลื่นไม่สามารถเดินทางไปได้ไกลโดยไม่ผิดเพี้ยน
ต่อไปนี้เป็นข้อดีบางประการสำหรับการนำการมอดูเลตไปใช้ในระบบสื่อสาร
- การลดขนาดเสาอากาศ
- ไม่มีการผสมสัญญาณ
- เพิ่มช่วงการสื่อสาร
- การมัลติเพล็กซ์ของสัญญาณ
- ความเป็นไปได้ของการปรับแบนด์วิดท์
- ปรับปรุงคุณภาพการรับสัญญาณ
สัญญาณในกระบวนการมอดูเลต
ต่อไปนี้เป็นสัญญาณสามประเภทในกระบวนการมอดูเลต
ข้อความหรือสัญญาณมอดูเลต
สัญญาณที่มีข้อความที่จะส่งเรียกว่าเป็นไฟล์ message signal. มันเป็นสัญญาณเบสแบนด์ซึ่งต้องผ่านกระบวนการมอดูเลตจึงจะส่งได้ ดังนั้นจึงเรียกอีกอย่างว่าmodulating signal.
สัญญาณผู้ให้บริการ
สัญญาณความถี่สูงซึ่งมีแอมพลิจูดความถี่และเฟสที่แน่นอน แต่ไม่มีข้อมูลเรียกว่า a carrier signal. เป็นสัญญาณว่างและใช้เพื่อส่งสัญญาณไปยังเครื่องรับหลังจากการมอดูเลต
สัญญาณมอดูเลต
สัญญาณผลลัพธ์หลังจากกระบวนการมอดูเลตเรียกว่า a modulated signal. สัญญาณนี้เป็นการรวมกันของสัญญาณมอดูเลตและสัญญาณพาหะ
ประเภทของการมอดูเลต
การปรับมีหลายประเภท ขึ้นอยู่กับเทคนิคการมอดูเลตที่ใช้พวกเขาถูกจัดประเภทดังแสดงในรูปต่อไปนี้

ประเภทของการมอดูเลตแบ่งออกเป็นคลื่นต่อเนื่องและการมอดูเลตแบบพัลส์
การมอดูเลตคลื่นต่อเนื่อง
ในการมอดูเลตคลื่นต่อเนื่องจะใช้คลื่นไซน์ความถี่สูงเป็นคลื่นพาหะ แบ่งออกเป็นแอมพลิจูดและมุมมอดูเลต
หากแอมพลิจูดของคลื่นพาหะความถี่สูงแตกต่างกันไปตามแอมพลิจูดทันทีของสัญญาณมอดูเลตเทคนิคดังกล่าวเรียกว่า Amplitude Modulation.
หากมุมของคลื่นพาหะแตกต่างกันไปตามค่าทันทีของสัญญาณมอดูเลตเทคนิคดังกล่าวจะเรียกว่าเป็น Angle Modulation. การมอดูเลตมุมยังแบ่งออกเป็นการมอดูเลตความถี่และการมอดูเลตเฟส
หากความถี่ของคลื่นพาหะแตกต่างกันไปตามค่าทันทีของสัญญาณมอดูเลตเทคนิคดังกล่าวจะเรียกว่าเป็น Frequency Modulation.
หากเฟสของคลื่นพาหะความถี่สูงแตกต่างกันไปตามค่าทันทีของสัญญาณมอดูเลตเทคนิคดังกล่าวจะเรียกว่าเป็น Phase Modulation.
การปรับพัลส์
ในการมอดูเลตแบบพัลส์จะใช้ลำดับระยะของพัลส์สี่เหลี่ยมเป็นคลื่นพาหะ ซึ่งจะแบ่งออกเป็นการมอดูเลตแบบอนาล็อกและดิจิตอล
ในเทคนิคการมอดูเลตแบบอะนาล็อกหากแอมพลิจูดหรือระยะเวลาหรือตำแหน่งของพัลส์แตกต่างกันไปตามค่าทันทีของสัญญาณมอดูเลตเบสแบนด์ดังนั้นเทคนิคดังกล่าวจะเรียกว่า Pulse Amplitude Modulation (PAM) หรือ Pulse Duration / Width Modulation (PDM / PWM) หรือ Pulse Position Modulation (PPM)
ในการมอดูเลตแบบดิจิทัลเทคนิคการมอดูเลตที่ใช้คือ Pulse Code Modulation (PCM) ซึ่งสัญญาณแอนะล็อกจะถูกแปลงเป็นรูปแบบดิจิทัล 1s และ 0s เนื่องจากผลลัพธ์คือรถไฟพัลส์รหัสจึงเรียกว่า PCM สิ่งนี้ได้รับการพัฒนาเพิ่มเติมเป็น Delta Modulation (DM) เทคนิคการมอดูเลตแบบดิจิทัลเหล่านี้จะกล่าวถึงในบทแนะนำการสื่อสารดิจิทัลของเรา
คลื่นต่อเนื่องดำเนินไปอย่างต่อเนื่องโดยไม่มีช่วงเวลาใด ๆ และเป็นสัญญาณข้อความเบสแบนด์ซึ่งมีข้อมูล คลื่นนี้จะต้องมีการมอดูเลต
ตามคำจำกัดความมาตรฐาน "ความกว้างของสัญญาณพาหะจะแตกต่างกันไปตามแอมพลิจูดของสัญญาณมอดูเลตในทันที" ซึ่งหมายความว่าแอมพลิจูดของสัญญาณพาหะที่ไม่มีข้อมูลจะแตกต่างกันไปตามความกว้างของสัญญาณที่มีข้อมูลในแต่ละช่วงเวลา สิ่งนี้สามารถอธิบายได้ดีจากตัวเลขต่อไปนี้



รูปแรกแสดงคลื่นมอดูเลตซึ่งเป็นสัญญาณข้อความ อันถัดไปคือคลื่นพาหะซึ่งเป็นสัญญาณความถี่สูงและไม่มีข้อมูล ในขณะที่อันสุดท้ายคือคลื่นมอดูเลตที่เป็นผลลัพธ์
จะสังเกตได้ว่ายอดบวกและลบของคลื่นพาหะนั้นเชื่อมต่อกันด้วยเส้นสมมุติ เส้นนี้ช่วยสร้างรูปร่างที่แน่นอนของสัญญาณมอดูเลต เส้นสมมุติบนคลื่นพาหะนี้เรียกว่า asEnvelope. เช่นเดียวกับสัญญาณข้อความ
นิพจน์ทางคณิตศาสตร์
ต่อไปนี้เป็นนิพจน์ทางคณิตศาสตร์สำหรับคลื่นเหล่านี้
การเป็นตัวแทนโดเมนเวลาของคลื่น
ให้สัญญาณมอดูเลตเป็น
$$ m \ left (t \ right) = A_m \ cos \ left (2 \ pi f_mt \ right) $$
และสัญญาณของผู้ให้บริการเป็น
$$ c \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) $$
ที่ไหน
$ A_m $ และ $ A_c $ คือแอมพลิจูดของสัญญาณมอดูเลตและสัญญาณพาหะตามลำดับ
$ f_m $ และ $ f_c $ คือความถี่ของสัญญาณมอดูเลตและสัญญาณพาหะตามลำดับ
จากนั้นสมการของคลื่นแอมพลิจูดมอดูเลตจะเป็น
$ s (t) = \ left [A_c + A_m \ cos \ left (2 \ pi f_mt \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $ (สมการ 1)
ดัชนีการมอดูเลต
คลื่นพาหะหลังจากถูกมอดูเลตแล้วหากคำนวณระดับมอดูเลตแล้วความพยายามดังกล่าวจะเรียกว่าเป็น Modulation Index หรือ Modulation Depth. มันระบุระดับของการมอดูเลตที่คลื่นพาหะได้รับ
จัดเรียงสมการ 1 ใหม่ตามด้านล่าง
$ s (t) = A_c \ left [1+ \ left (\ frac {A_m} {A_c} \ right) \ cos \ left (2 \ pi f_mt \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $
$ \ Rightarrow s \ left (t \ right) = A_c \ left [1 + \ mu \ cos \ left (2 \ pi f_m t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $ ( สมการ 2)
โดยที่ $ \ mu $ คือดัชนีการมอดูเลตและเท่ากับอัตราส่วนของ $ A_m $ และ $ A_c $ ในทางคณิตศาสตร์เราสามารถเขียนเป็น
$ \ mu = \ frac {A_m} {A_c} $ (สมการ 3)
ดังนั้นเราสามารถคำนวณค่าของดัชนีการมอดูเลตได้โดยใช้สูตรข้างต้นเมื่อทราบแอมพลิจูดของข้อความและสัญญาณพาหะ
ตอนนี้ให้เราได้มาอีกหนึ่งสูตรสำหรับดัชนีการมอดูเลตโดยพิจารณาสมการ 1 เราสามารถใช้สูตรนี้ในการคำนวณค่าดัชนีการมอดูเลตเมื่อทราบค่าแอมพลิจูดสูงสุดและต่ำสุดของคลื่นมอดูเลต
ให้ $ A_ \ max $ และ $ A_ \ min $ เป็นแอมพลิจูดสูงสุดและต่ำสุดของคลื่นมอดูเลต
เราจะได้รับแอมพลิจูดสูงสุดของคลื่นมอดูเลตเมื่อ $ \ cos \ left (2 \ pi f_mt \ right) $ เท่ากับ 1
$ \ Rightarrow A_ \ max = A_c + A_m $ (สมการ 4)
เราจะได้แอมพลิจูดต่ำสุดของคลื่นมอดูเลตเมื่อ $ \ cos \ left (2 \ pi f_mt \ right) $ เท่ากับ -1
$ \ Rightarrow A_ \ min = A_c - A_m $ (สมการ 5)
เพิ่มสมการ 4 และสมการ 5
$$ A_ \ max + A_ \ min = A_c + A_m + A_c-A_m = 2A_c $$
$ \ Rightarrow A_c = \ frac {A_ \ max + A_ \ min} {2} $ (สมการ 6)
ลบสมการ 5 ออกจากสมการ 4
$$ A_ \ max - A_ \ min = A_c + A_m - \ left (A_c -A_m \ right) = 2A_m $$
$ \ Rightarrow A_m = \ frac {A_ \ max - A_ \ min} {2} $ (สมการ 7)
อัตราส่วนของสมการ 7 และสมการ 6 จะเป็นดังนี้
$$ \ frac {A_m} {A_c} = \ frac {\ left (A_ {max} - A_ {min} \ right) / 2} {\ left (A_ {max} + A_ {min} \ right) / 2 } $$
$ \ Rightarrow \ mu = \ frac {A_ \ max - A_ \ min} {A_ \ max + A_ \ min} $ (สมการ 8)
ดังนั้นสมการ 3 และสมการ 8 จึงเป็นสองสูตรสำหรับดัชนีการมอดูเลต ดัชนีการมอดูเลตหรือความลึกของการมอดูเลตมักแสดงเป็นเปอร์เซ็นต์เรียกว่าเปอร์เซ็นต์ของการมอดูเลต เราจะได้รับไฟล์percentage of modulationเพียงแค่คูณค่าดัชนีการมอดูเลตด้วย 100
สำหรับการมอดูเลตที่สมบูรณ์แบบค่าของดัชนีการมอดูเลตควรเป็น 1 ซึ่งหมายความว่าเปอร์เซ็นต์ของการมอดูเลตควรเป็น 100%
ตัวอย่างเช่นถ้าค่านี้น้อยกว่า 1 นั่นคือดัชนีการมอดูเลตคือ 0.5 ดังนั้นเอาต์พุตที่มอดูเลตจะมีลักษณะดังรูปต่อไปนี้ จะเรียกว่าเป็นUnder-modulation. คลื่นดังกล่าวเรียกว่าเป็นunder-modulated wave.

ถ้าค่าของดัชนีการมอดูเลตมากกว่า 1 เช่น 1.5 หรือมากกว่านั้นคลื่นจะเป็น over-modulated wave. มันจะมีลักษณะดังรูปต่อไปนี้

เมื่อค่าของดัชนีการมอดูเลตเพิ่มขึ้นผู้ให้บริการจะประสบกับการกลับเฟส180 oซึ่งทำให้เกิดแถบด้านข้างเพิ่มเติมและด้วยเหตุนี้คลื่นจึงบิดเบี้ยว คลื่นที่มีการมอดูเลตมากเกินไปทำให้เกิดการรบกวนซึ่งไม่สามารถกำจัดได้
แบนด์วิดธ์ของ AM Wave
Bandwidth(BW) คือความแตกต่างระหว่างความถี่สูงสุดและต่ำสุดของสัญญาณ ในทางคณิตศาสตร์เราสามารถเขียนเป็น
$$ BW = f_ {max} - f_ {min} $$
พิจารณาสมการของคลื่นมอดูเลตแอมพลิจูดต่อไปนี้
$$ s \ left (t \ right) = A_c \ left [1 + \ mu \ cos \ left (2 \ pi f_m t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $$
$$ \ Rightarrow s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) + A_c \ mu \ cos (2 \ pi f_ct) \ cos \ left (2 \ pi f_mt \ right) $$
$ \ Rightarrow s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) + \ frac {A_c \ mu} {2} \ cos \ left [2 \ pi \ left (f_c + f_m \ right) t \ right] + \ frac {A_c \ mu} {2} \ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] $
ดังนั้นคลื่นมอดูเลตแอมพลิจูดจึงมีสามความถี่ ความถี่เหล่านี้คือความถี่ของผู้ให้บริการ $ f_c $ ความถี่ไซด์แบนด์ด้านบน $ f_c + f_m $ และความถี่ด้านข้างต่ำกว่า $ f_c-f_m $
ที่นี่
$ f_ {max} = f_c + f_m $ และ $ f_ {min} = f_c-f_m $
แทนค่า $ f_ {max} $ และ $ f_ {min} $ ในสูตรแบนด์วิดท์
$$ BW = f_c + f_m- \ left (f_c-f_m \ right) $$
$$ \ Rightarrow BW = 2f_m $$
ดังนั้นจึงกล่าวได้ว่าแบนด์วิดท์ที่ต้องการสำหรับคลื่นมอดูเลตแอมพลิจูดเป็นสองเท่าของความถี่ของสัญญาณมอดูเลต
การคำนวณกำลังของคลื่น AM
พิจารณาสมการของคลื่นมอดูเลตแอมพลิจูดต่อไปนี้
$ \ s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) + \ frac {A_c \ mu} {2} \ cos \ left [2 \ pi \ left (f_c + f_m \ ขวา) t \ right] + \ frac {A_c \ mu} {2} \ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] $
พลังของคลื่น AM เท่ากับผลรวมของพลังของพาหะไซด์แบนด์ด้านบนและส่วนประกอบความถี่ไซด์แบนด์ด้านล่าง
$$ P_t = P_c + P_ {USB} + P_ {LSB} $$
เรารู้ว่าสูตรมาตรฐานสำหรับพลังของสัญญาณ cos คือ
$$ P = \ frac {{v_ {rms}} ^ {2}} {R} = \ frac {\ left (v_m / \ sqrt {2} \ right) ^ 2} {2} $$
ที่ไหน
$ v_ {rms} $ คือค่า rms ของสัญญาณ cos
$ v_m $ คือค่าสูงสุดของสัญญาณ cos
ขั้นแรกให้เราค้นหาพลังของผู้ให้บริการแถบด้านข้างด้านบนและด้านล่างทีละตัว
กำลังของผู้ให้บริการ
$$ P_c = \ frac {\ left (A_c / \ sqrt {2} \ right) ^ 2} {R} = \ frac {{A_ {c}} ^ {2}} {2R} $$
สายไฟด้านข้างด้านบน
$$ P_ {USB} = \ frac {\ left (A_c \ mu / 2 \ sqrt {2} \ right) ^ 2} {R} = \ frac {{A_ {c}} ^ {2} {_ {\ มู}} ^ {2}} {8R} $$
ในทำนองเดียวกันเราจะได้รับพลังงานแถบด้านข้างที่ต่ำกว่าเช่นเดียวกับกำลังของแถบด้านบน
$$ P_ {LSB} = \ frac {{A_ {c}} ^ {2} {_ {\ mu}} ^ {2}} {8R} $$
ตอนนี้ให้เราเพิ่มพลังทั้งสามนี้เพื่อรับพลังของคลื่น AM
$$ P_t = \ frac {{A_ {c}} ^ {2}} {2R} + \ frac {{A_ {c}} ^ {2} {_ {\ mu}} ^ {2}} {8R} + \ frac {{A_ {c}} ^ {2} {_ {\ mu}} ^ {2}} {8R} $$
$$ \ Rightarrow P_t = \ left (\ frac {{A_ {c}} ^ {2}} {2R} \ right) \ left (1+ \ frac {\ mu ^ 2} {4} + \ frac {\ มู ^ 2} {4} \ right) $$
$$ \ Rightarrow P_t = P_c \ left (1+ \ frac {\ mu ^ 2} {2} \ right) $$
เราสามารถใช้สูตรข้างต้นเพื่อคำนวณกำลังของคลื่น AM เมื่อทราบกำลังพาหะและดัชนีการมอดูเลต
ถ้าดัชนีการมอดูเลต $ \ mu = 1 $ แล้วพลังของคลื่น AM จะเท่ากับ 1.5 เท่าของกำลังพาหะ ดังนั้นกำลังที่ต้องใช้ในการส่งคลื่น AM จึงเป็น 1.5 เท่าของกำลังพาหะเพื่อการมอดูเลตที่สมบูรณ์แบบ
ในบทที่แล้วเราได้กล่าวถึงพารามิเตอร์ที่ใช้ใน Amplitude Modulation พารามิเตอร์แต่ละตัวมีสูตรของตัวเอง โดยใช้สูตรเหล่านั้นเราสามารถค้นหาค่าพารามิเตอร์ที่เกี่ยวข้องได้ ในบทนี้ให้เราแก้ปัญหาเล็กน้อยตามแนวคิดของการมอดูเลตแอมพลิจูด
ปัญหา 1
สัญญาณมอดูเลต $ m \ left (t \ right) = 10 \ cos \ left (2 \ pi \ times 10 ^ 3 t \ right) $ คือแอมพลิจูดที่มอดูเลตกับสัญญาณพาหะ $ c \ left (t \ right) = 50 \ cos \ left (2 \ pi \ คูณ 10 ^ 5 t \ right) $. ค้นหาดัชนีการมอดูเลตกำลังพาหะและพลังงานที่จำเป็นสำหรับการส่งคลื่น AM
วิธีการแก้
กำหนดสมการของสัญญาณมอดูเลตเป็น
$$ m \ left (t \ right) = 10 \ cos \ left (2 \ pi \ times 10 ^ 3 t \ right) $$
เรารู้สมการมาตรฐานของสัญญาณมอดูเลตเป็น
$$ m \ left (t \ right) = A_m \ cos \ left (2 \ pi f_mt \ right) $$
จากการเปรียบเทียบสองสมการข้างต้นเราจะได้
ความกว้างของสัญญาณมอดูเลตเป็น $ A_m = 10 โวลต์ $
และความถี่ของการมอดูเลตสัญญาณเป็น $$ f_m = 10 ^ 3 Hz = 1 KHz $$
สมการของสัญญาณพาหะคือ
$$ c \ left (t \ right) = 50 \ cos \ left (2 \ pi \ times 10 ^ 5t \ right) $$
สมการมาตรฐานของสัญญาณพาหะคือ
$$ c \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) $$
โดยการเปรียบเทียบทั้งสองสมการเราจะได้
แอมพลิจูดของสัญญาณผู้ให้บริการเป็น $ A_c = 50volts $
และความถี่ของสัญญาณผู้ให้บริการเป็น $ f_c = 10 ^ 5 Hz = 100 KHz $
เรารู้สูตรสำหรับดัชนีการมอดูเลตเป็น
$$ \ mu = \ frac {A_m} {A_c} $$
แทนค่า $ A_m $ และ $ A_c $ ในสูตรข้างต้น
$$ \ mu = \ frac {10} {50} = 0.2 $$
ดังนั้นค่าของ modulation index is 0.2 และเปอร์เซ็นต์ของการมอดูเลตคือ 20%
สูตรสำหรับพลังงานของผู้ให้บริการ $ P_c = $ คือ
$$ P_c = \ frac {{A_ {c}} ^ {2}} {2R} $$
สมมติ $ R = 1 \ Omega $ และแทนค่า $ A_c $ ในสูตรด้านบน
$$ P_c = \ frac {\ left (50 \ right) ^ 2} {2 \ left (1 \ right)} = 1250W $$
ดังนั้นไฟล์ Carrier power, $ P_c $ คือ 1250 watts.
เรารู้สูตรสำหรับ power จำเป็นสำหรับ transmitting AM คลื่นคือ
$$ \ Rightarrow P_t = P_c \ left (1+ \ frac {\ mu ^ 2} {2} \ right) $$
แทนค่า $ P_c $ และ $ \ mu $ ในสูตรด้านบน
$$ P_t = 1250 \ left (1+ \ frac {\ left (0.2 \ right) ^ 2} {2} \ right) = 1275W $$
ดังนั้นไฟล์ power required for transmitting AM คลื่นคือ 1275 watts.
ปัญหา 2
สมการของคลื่นแอมพลิจูดกำหนดโดย $ s \ left (t \ right) = 20 \ left [1 + 0.8 \ cos \ left (2 \ pi \ times 10 ^ 3t \ right) \ right] \ cos \ left (4 \ pi \ times 10 ^ 5t \ right) $. ค้นหากำลังของพาหะพลังงานไซด์แบนด์ทั้งหมดและความกว้างแบนด์ของคลื่น AM
วิธีการแก้
กำหนดสมการของคลื่นมอดูเลตแอมพลิจูดคือ
$$ s \ left (t \ right) = 20 \ left [1 + 0.8 \ cos \ left (2 \ pi \ times 10 ^ 3t \ right) \ right] \ cos \ left (4 \ pi \ times 10 ^ 5t \ right) $$
เขียนสมการข้างบนอีกครั้งเป็น
$$ s \ left (t \ right) = 20 \ left [1 + 0.8 \ cos \ left (2 \ pi \ times 10 ^ 3t \ right) \ right] \ cos \ left (2 \ pi \ times 2 \ times 10 ^ 5t \ right) $$
เรารู้ว่าสมการของคลื่นมอดูเลตแอมพลิจูดคือ
$$ s \ left (t \ right) = A_c \ left [1+ \ mu \ cos \ left (2 \ pi f_mt \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $$
จากการเปรียบเทียบสองสมการข้างต้นเราจะได้
แอมพลิจูดของสัญญาณพาหะเท่ากับ $ A_c = 20 โวลต์ $
ดัชนีการมอดูเลตเป็น $ \ mu = 0.8 $
ความถี่ของการปรับสัญญาณเป็น $ f_m = 10 ^ 3Hz = 1 KHz $
ความถี่ของสัญญาณผู้ให้บริการเท่ากับ $ f_c = 2 \ times 10 ^ 5Hz = 200KHz $
สูตรสำหรับกำลังของผู้ให้บริการ $ P_c $ คือ
$$ P_c = \ frac {{A_ {e}} ^ {2}} {2R} $$
สมมติ $ R = 1 \ Omega $ และแทนค่า $ A_c $ ในสูตรด้านบน
$$ P_c = \ frac {\ left (20 \ right) ^ 2} {2 \ left (1 \ right)} = 200W $$
ดังนั้นไฟล์ Carrier power, $ P_c $ คือ 200watts.
เรารู้ว่าสูตรสำหรับพลังวงข้างทั้งหมดคือ
$$ P_ {SB} = \ frac {P_c \ mu ^ 2} {2} $$
แทนค่า $ P_c $ และ $ \ mu $ ในสูตรด้านบน
$$ P_ {SB} = \ frac {200 \ times \ left (0.8 \ right) ^ 2} {2} = 64W $$
ดังนั้นไฟล์ total side band power คือ 64 watts.
เรารู้ว่าสูตรสำหรับแบนด์วิดท์ของคลื่น AM คือ
$$ BW = 2f_m $$
แทนค่า $ f_m $ ในสูตรข้างต้น
$$ BW = 2 \ left (1K \ right) = 2 KHz $$
ดังนั้นไฟล์ bandwidth ของคลื่น AM คือ 2 KHz.
ในบทนี้ให้เราพูดคุยเกี่ยวกับโมดูเลเตอร์ซึ่งสร้างคลื่นมอดูเลตแอมพลิจูด โมดูเลเตอร์สองตัวต่อไปนี้สร้างคลื่น AM
- โมดูเลเตอร์กฎหมายสแควร์
- การสลับโมดูเลเตอร์
Square Law Modulator
ต่อไปนี้เป็นแผนภาพบล็อกของโมดูเลเตอร์กฎสี่เหลี่ยม

ให้สัญญาณมอดูเลตและสัญญาณพาหะแสดงเป็น $ m \ left (t \ right) $ และ $ A \ cos \ left (2 \ pi f_ct \ right) $ ตามลำดับ สัญญาณทั้งสองนี้ใช้เป็นอินพุตสำหรับบล็อกฤดูร้อน (แอดเดอร์) บล็อกฤดูร้อนนี้สร้างเอาต์พุตซึ่งเป็นส่วนเพิ่มเติมของการมอดูเลตและสัญญาณพาหะ ในทางคณิตศาสตร์เราสามารถเขียนเป็น
$$ V_1t = m \ left (t \ right) + A_c \ cos \ left (2 \ pi f_ct \ right) $$
สัญญาณ $ V_1t $ นี้ถูกนำไปใช้เป็นอินพุตไปยังอุปกรณ์ที่ไม่ใช่เชิงเส้นเช่นไดโอด ลักษณะของไดโอดมีความสัมพันธ์อย่างใกล้ชิดกับกฎกำลังสอง
$ V_2t = k_1V_1 \ left (t \ right) + k_2V_1 ^ 2 \ left (t \ right) $ (สมการ 1)
โดยที่ $ k_1 $ และ $ k_2 $ เป็นค่าคงที่
แทนที่ $ V_1 \ left (t \ right) $ ในสมการ 1
$$ V_2 \ left (t \ right) = k_1 \ left [m \ left (t \ right) + A_c \ cos \ left (2 \ pi f_ct \ right) \ right] + k_2 \ left [m \ left (t \ right) + A_c \ cos \ left (2 \ pi f_ct \ right) \ right] ^ 2 $$
$ \ Rightarrow V_2 \ left (t \ right) = k_1 m \ left (t \ right) + k_1 A_c \ cos \ left (2 \ pi f_ct \ right) + k_2 m ^ 2 \ left (t \ right) + $
$ k_2A_c ^ 2 \ cos ^ 2 \ left (2 \ pi f_ct \ right) + 2k_2m \ left (t \ right) A_c \ cos \ left (2 \ pi f_ct \ right) $
$ \ Rightarrow V_2 \ left (t \ right) = k_1 m \ left (t \ right) + k_2 m ^ 2 \ left (t \ right) + k_2 A ^ 2_c \ cos ^ 2 \ left (2 \ pi f_ct \ ขวา) + $
$ k_1A_c \ left [1+ \ left (\ frac {2k_2} {k_1} \ right) m \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $
เงื่อนไขสุดท้ายของสมการข้างต้นแสดงถึงคลื่น AM ที่ต้องการและไม่ต้องการคำสามคำแรกของสมการข้างต้น ดังนั้นด้วยความช่วยเหลือของ band pass filter เราสามารถส่งเฉพาะคลื่น AM และกำจัดสามคำแรกได้
ดังนั้นผลลัพธ์ของโมดูเลเตอร์กฎหมายกำลังสองคือ
$$ s \ left (t \ right) = k_1A_c \ left [1+ \ left (\ frac {2k_2} {k_1} \ right) m \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $$
สมการมาตรฐานของคลื่น AM คือ
$$ s \ left (t \ right) = A_c \ left [1 + k_am \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $$
โดยที่ $ K_a $ คือความไวของแอมพลิจูด
เมื่อเปรียบเทียบผลลัพธ์ของโมดูเลเตอร์กฎกำลังสองกับสมการมาตรฐานของคลื่น AM เราจะได้ค่ามาตราส่วนเป็น $ k_1 $ และค่าความไวแอมพลิจูด $ k_a $ เป็น $ \ frac {2k_2} {k1} $
การสลับโมดูเลเตอร์
ต่อไปนี้เป็นแผนภาพบล็อกของการเปลี่ยนโมดูเลเตอร์

การสลับโมดูเลเตอร์คล้ายกับตัวปรับกฎสี่เหลี่ยม ข้อแตกต่างเพียงอย่างเดียวคือในโมดูเลเตอร์กฎสี่เหลี่ยมไดโอดจะทำงานในโหมดที่ไม่ใช่เชิงเส้นในขณะที่ในโมดูเลเตอร์สวิตชิ่งไดโอดจะต้องทำงานเป็นสวิตช์ในอุดมคติ
ให้สัญญาณมอดูเลตและสัญญาณพาหะแสดงเป็น $ m \ left (t \ right) $ และ $ c \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) $ ตามลำดับ สัญญาณทั้งสองนี้ใช้เป็นอินพุตสำหรับบล็อกฤดูร้อน (แอดเดอร์) บล็อกฤดูร้อนสร้างเอาต์พุตซึ่งเป็นการเพิ่มสัญญาณมอดูเลตและสัญญาณพาหะ ในทางคณิตศาสตร์เราสามารถเขียนเป็น
$$ V_1 \ left (t \ right) = m \ left (t \ right) + c \ left (t \ right) = m \ left (t \ right) + A_c \ cos \ left (2 \ pi f_ct \ right ) $$
สัญญาณ $ V_1 \ left (t \ right) $ นี้ถูกนำไปใช้เป็นอินพุตของไดโอด สมมติว่าขนาดของสัญญาณมอดูเลตมีขนาดเล็กมากเมื่อเทียบกับแอมพลิจูดของสัญญาณพาหะ $ A_c $ ดังนั้นการดำเนินการเปิดและปิดของไดโอดจึงถูกควบคุมโดยสัญญาณผู้ให้บริการ $ c \ left (t \ right) $ ซึ่งหมายความว่าไดโอดจะเอนเอียงไปข้างหน้าเมื่อ $ c \ left (t \ right)> 0 $ และจะมีการย้อนกลับเมื่อ $ c \ left (t \ right) <0 $
ดังนั้นเอาต์พุตของไดโอดคือ
$$ V_2 \ left (t \ right) = \ left \ {\ begin {matrix} V_1 \ left (t \ right) & if & c \ left (t \ right)> 0 \\ 0 & if & c \ left (t \ right) <0 \ end {matrix} \ right. $$
เราสามารถประมาณนี้เป็น
$ V_2 \ left (t \ right) = V_1 \ left (t \ right) x \ left (t \ right) $ (สมการ 2)
โดยที่ $ x \ left (t \ right) $ คือการฝึกพัลส์เป็นระยะโดยมีช่วงเวลา $ T = \ frac {1} {f_c} $

การแสดงอนุกรมฟูเรียร์ของขบวนพัลส์คาบนี้คือ
$$ x \ left (t \ right) = \ frac {1} {2} + \ frac {2} {\ pi} \ sum_ {n = 1} ^ {\ infty} \ frac {\ left (-1 \ ขวา) ^ n-1} {2n-1} \ cos \ left (2 \ pi \ left (2n-1 \ right) f_ct \ right) $$
$$ \ Rightarrow x \ left (t \ right) = \ frac {1} {2} + \ frac {2} {\ pi} \ cos \ left (2 \ pi f_ct \ right) - \ frac {2} { 3 \ pi} \ cos \ left (6 \ pi f_ct \ right) + .... $$
แทนค่า $ V_1 \ left (t \ right) $ และ $ x \ left (t \ right) $ ในสมการ 2
$ V_2 \ left (t \ right) = \ left [m \ left (t \ right) + A_c \ cos \ left (2 \ pi f_ct \ right) \ right] \ left [\ frac {1} {2} + \ frac {2} {\ pi} \ cos \ left (2 \ pi f_ct \ right) - \ frac {2} {3 \ pi} \ cos \ left (6 \ pi f_ct \ right) + ..... \ right] $
$ V_2 \ left (t \ right) = \ frac {m \ left (t \ right)} {2} + \ frac {A_c} {2} \ cos \ left (2 \ pi f_ct \ right) + \ frac { 2m \ left (t \ right)} {\ pi} \ cos \ left (2 \ pi f_ct \ right) + \ frac {2A_c} {\ pi} \ cos ^ 2 \ left (2 \ pi f_ct \ right) - $
$ \ frac {2m \ left (t \ right)} {3 \ pi} \ cos \ left (6 \ pi f_ct \ right) - \ frac {2A_c} {3 \ pi} \ cos \ left (2 \ pi f_ct \ right) \ cos \ left (6 \ pi f_ct \ right) + ..... $
$ V_2 \ left (t \ right) = \ frac {A_c} {2} \ left (1+ \ left (\ frac {4} {\ pi A_c} \ right) m \ left (t \ right) \ right) \ cos \ left (2 \ pi f_ct \ right) + \ frac {m \ left (t \ right)} {2} + \ frac {2A_c} {\ pi} \ cos ^ 2 \ left (2 \ pi f_ct \ ขวา) - $
$ \ frac {2m \ left (t \ right)} {3 \ pi} \ cos \ left (6 \ pi f_ct \ right) - \ frac {2A_c} {3 \ pi} \ cos \ left (2 \ pi f_ct \ right) \ cos \ left (6 \ pi f_ct \ right) + ..... $
1 เซนต์ระยะของสมการข้างต้นหมายถึงคลื่น AM ที่ต้องการและข้อกำหนดที่เหลือเป็นคำที่ไม่พึงประสงค์ ดังนั้นด้วยความช่วยเหลือของ band pass filter เราสามารถส่งเฉพาะคลื่น AM และกำจัดเงื่อนไขที่เหลือได้
ดังนั้นผลลัพธ์ของสวิตชิ่งโมดูเลเตอร์คือ
$$ s \ left (t \ right) = \ frac {A_c} {2} \ left (1+ \ left (\ frac {4} {\ pi A_c} \ right) m \ left (t \ right) \ right ) \ cos \ left (2 \ pi f_ct \ right) $$
เรารู้ว่าสมการมาตรฐานของคลื่น AM คือ
$$ s \ left (t \ right) = A_c \ left [1 + k_am \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $$
โดยที่ $ k_a $ คือความไวของแอมพลิจูด
เมื่อเปรียบเทียบผลลัพธ์ของโมดูเลเตอร์สวิตชิ่งกับสมการมาตรฐานของคลื่น AM เราจะได้ค่ามาตราส่วนเป็น 0.5 และค่าความไวแอมพลิจูด $ k_a $ เป็น $ \ frac {4} {\ pi A_c} $
กระบวนการแยกสัญญาณข้อความต้นฉบับจากคลื่นมอดูเลตเรียกว่า detection หรือ demodulation. วงจรซึ่ง demodulate คลื่นมอดูเลตเรียกว่าdemodulator. Demodulators (เครื่องตรวจจับ) ต่อไปนี้ใช้สำหรับ demodulating AM wave
- Square Law Demodulator
- เครื่องตรวจจับซองจดหมาย
Square Law Demodulator
Square Law Demodulator ใช้เพื่อ demodulate คลื่น AM ระดับต่ำ ต่อไปนี้เป็นแผนภาพบล็อกของsquare law demodulator.

Demodulator นี้ประกอบด้วยอุปกรณ์กฎสี่เหลี่ยมและตัวกรองความถี่ต่ำ คลื่น AM $ V_1 \ left (t \ right) $ ถูกนำไปใช้เป็นอินพุตสำหรับเครื่องถอดรหัสนี้
รูปแบบมาตรฐานของคลื่น AM คือ
$$ V_1 \ left (t \ right) = A_c \ left [1 + k_am \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $$
เราทราบว่าความสัมพันธ์ทางคณิตศาสตร์ระหว่างอินพุตและเอาต์พุตของอุปกรณ์กฎกำลังสองคือ
$ V_2 \ left (t \ right) = k_1V_1 \ left (t \ right) + k_2V_1 ^ 2 \ left (t \ right) $ (สมการ 1)
ที่ไหน
$ V_1 \ left (t \ right) $ คืออินพุตของอุปกรณ์กฎกำลังสองซึ่งไม่มีอะไรนอกจากคลื่น AM
$ V_2 \ left (t \ right) $ คือเอาต์พุตของอุปกรณ์กฎกำลังสอง
$ k_1 $ และ $ k_2 $ เป็นค่าคงที่
แทนที่ $ V_1 \ left (t \ right) $ ในสมการ 1
$$ V_2 \ left (t \ right) = k_1 \ left (A_c \ left [1 + k_am \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) \ right) + k_2 \ ซ้าย (A_c \ left [1 + k_am \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) \ right) ^ 2 $$
$ \ Rightarrow V_2 \ left (t \ right) = k_1A_c \ cos \ left (2 \ pi f_ct \ right) + k_1A_ck_am \ left (t \ right) \ cos \ left (2 \ pi f_ct \ right) + $
$ k_2 {A_ {c}} ^ {2} \ left [1+ {K_ {a}} ^ {2} m ^ 2 \ left (t \ right) + 2k_am \ left (t \ right) \ right] \ ซ้าย (\ frac {1+ \ cos \ left (4 \ pi f_ct \ right)} {2} \ right) $
$ \ Rightarrow V_2 \ left (t \ right) = k_1A_c \ cos \ left (2 \ pi f_ct \ right) + k_1A_ck_am \ left (t \ right) \ cos \ left (2 \ pi f_ct \ right) + \ frac { K_2 {A_ {c}} ^ {2}} {2} + $
$ \ frac {K_2 {A_ {c}} ^ {2}} {2} \ cos \ left (4 \ pi f_ct \ right) + \ frac {k_2 {A_ {c}} ^ {2} {k_ {ก }} ^ {2} m ^ 2 \ left (t \ right)} {2} + \ frac {k_2 {A_ {c}} ^ {2} {k_ {a}} ^ {2} m ^ 2 \ left (t \ right)} {2} \ cos \ left (4 \ pi f_ct \ right) + $
$ k_2 {A_ {c}} ^ {2} k_am \ left (t \ right) + k_2 {A_ {c}} ^ {2} k_am \ left (t \ right) \ cos \ left (4 \ pi f_ct \ ขวา) $
ในสมการข้างต้นคำว่า $ k_2 {A_ {c}} ^ {2} k_am \ left (t \ right) $ คือสัญญาณข้อความในเวอร์ชันที่ปรับขนาดแล้ว สามารถแยกออกได้โดยส่งสัญญาณข้างต้นผ่านตัวกรองความถี่ต่ำและส่วนประกอบ DC $ \ frac {k_2 {A_ {c}} ^ {2}} {2} $ สามารถกำจัดได้ด้วยความช่วยเหลือของตัวเก็บประจุแบบ coupling
เครื่องตรวจจับซองจดหมาย
เครื่องตรวจจับซองจดหมายใช้ในการตรวจจับ (demodulate) คลื่น AM ระดับสูง ต่อไปนี้เป็นแผนภาพบล็อกของเครื่องตรวจจับซองจดหมาย

เครื่องตรวจจับซองนี้ประกอบด้วยไดโอดและตัวกรองความถี่ต่ำ ที่นี่ไดโอดเป็นองค์ประกอบหลักในการตรวจจับ ดังนั้นเครื่องตรวจจับซองจดหมายจึงเรียกอีกอย่างว่าdiode detector. ตัวกรองความถี่ต่ำประกอบด้วยตัวต้านทานและตัวเก็บประจุแบบขนานกัน
คลื่น AM $ s \ left (t \ right) $ ถูกนำไปใช้เป็นอินพุตของเครื่องตรวจจับนี้
เรารู้ว่ารูปแบบมาตรฐานของคลื่น AM คือ
$$ s \ left (t \ right) = A_c \ left [1 + k_am \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $$
ในครึ่งรอบบวกของคลื่น AM ไดโอดจะทำหน้าที่และตัวเก็บประจุจะชาร์จไปที่ค่าสูงสุดของคลื่น AM เมื่อค่าของคลื่น AM น้อยกว่าค่านี้ไดโอดจะมีความเอนเอียงย้อนกลับ ดังนั้นตัวเก็บประจุจะปล่อยผ่านตัวต้านทานRจนถึงครึ่งรอบบวกของคลื่น AM ถัดไป เมื่อค่าของคลื่น AM มากกว่าแรงดันตัวเก็บประจุไดโอดจะดำเนินการและกระบวนการจะถูกทำซ้ำ
เราควรเลือกค่าส่วนประกอบในลักษณะที่ตัวเก็บประจุชาร์จเร็วมากและคายประจุช้ามาก เป็นผลให้เราได้รูปคลื่นแรงดันไฟฟ้าของตัวเก็บประจุแบบเดียวกับซองจดหมายของคลื่น AM ซึ่งเกือบจะคล้ายกับสัญญาณมอดูเลต
ในกระบวนการของการมอดูเลตแอมพลิจูดคลื่นมอดูเลตประกอบด้วยคลื่นพาหะและแถบด้านข้างสองเส้น คลื่นมอดูเลตมีข้อมูลเฉพาะในแถบด้านข้างSideband ไม่มีอะไรนอกจากย่านความถี่ที่มีกำลังซึ่งเป็นความถี่ที่ต่ำกว่าและสูงกว่าของความถี่พาหะ
การส่งสัญญาณซึ่งมีผู้ให้บริการพร้อมกับแถบด้านข้างสองเส้นสามารถเรียกได้ว่าเป็น Double Sideband Full Carrier ระบบหรือง่ายๆ DSBFC. มันถูกพล็อตดังแสดงในรูปต่อไปนี้

อย่างไรก็ตามการส่งสัญญาณดังกล่าวไม่มีประสิทธิภาพ เนื่องจากกำลังสองในสามของกำลังเสียไปในสายการบินซึ่งไม่มีข้อมูลใด ๆ
หากผู้ให้บริการรายนี้ถูกระงับและพลังงานที่บันทึกไว้ถูกกระจายไปยังแถบด้านข้างทั้งสองกระบวนการดังกล่าวจะเรียกว่าเป็น Double Sideband Suppressed Carrier ระบบหรือง่ายๆ DSBSC. มันถูกพล็อตดังแสดงในรูปต่อไปนี้

นิพจน์ทางคณิตศาสตร์
ให้เราพิจารณานิพจน์ทางคณิตศาสตร์เดียวกันสำหรับการมอดูเลตและสัญญาณพาหะตามที่เราได้พิจารณาในบทก่อนหน้านี้
กล่าวคือสัญญาณมอดูเลต
$$ m \ left (t \ right) = A_m \ cos \ left (2 \ pi f_mt \ right) $$
สัญญาณผู้ให้บริการ
$$ c \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) $$
ในทางคณิตศาสตร์เราสามารถแทนค่า equation of DSBSC wave เป็นผลิตภัณฑ์ของสัญญาณมอดูเลตและสัญญาณพาหะ
$$ s \ left (t \ right) = m \ left (t \ right) c \ left (t \ right) $$
$$ \ Rightarrow s \ left (t \ right) = A_mA_c \ cos \ left (2 \ pi f_mt \ right) \ cos \ left (2 \ pi f_ct \ right) $$
แบนด์วิดท์ของ DSBSC Wave
เรารู้ว่าสูตรสำหรับแบนด์วิดท์ (BW) คือ
$$ BW = f_ {max} -f_ {min} $$
พิจารณาสมการของคลื่นมอดูเลต DSBSC
$$ s \ left (t \ right) = A_mA_c \ cos \ left (2 \ pi f_mt \ right) \ cos (2 \ pi f_ct) $$
$$ \ Rightarrow s \ left (t \ right) = \ frac {A_mA_c} {2} \ cos \ left [2 \ pi \ left (f_c + f_m \ right) t \ right] + \ frac {A_mA_c} {2 } \ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] $$
คลื่นมอดูเลต DSBSC มีความถี่เพียงสองความถี่ ดังนั้นความถี่สูงสุดและต่ำสุดคือ $ f_c + f_m $ และ $ f_c-f_m $ ตามลำดับ
กล่าวคือ
$ f_ {max} = f_c + f_m $ และ $ f_ {min} = f_c-f_m $
แทนค่า $ f_ {max} $ และ $ f_ {min} $ ในสูตรแบนด์วิดท์
$$ BW = f_c + f_m- \ left (f_c-f_m \ right) $$
$$ \ Rightarrow BW = 2f_m $$
ดังนั้นแบนด์วิดท์ของคลื่น DSBSC จึงเหมือนกับคลื่น AM และมีค่าเท่ากับสองเท่าของความถี่ของสัญญาณมอดูเลต
การคำนวณกำลังของคลื่น DSBSC
พิจารณาสมการต่อไปนี้ของคลื่นมอดูเลต DSBSC
$$ s \ left (t \ right) = \ frac {A_mA_c} {2} \ cos \ left [2 \ pi \ left (f_c + f_m \ right) t \ right] + \ frac {A_mA_c} {2} \ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] $$
พลังของคลื่น DSBSC เท่ากับผลรวมของพลังของไซด์แบนด์ด้านบนและส่วนประกอบความถี่ไซด์แบนด์ล่าง
$$ P_t = P_ {USB} + P_ {LSB} $$
เรารู้ว่าสูตรมาตรฐานสำหรับพลังของสัญญาณ cos คือ
$$ P = \ frac {{v_ {rms}} ^ {2}} {R} = \ frac {\ left (v_m \ sqrt {2} \ right) ^ 2} {R} $$
ขั้นแรกให้เราค้นหาพลังของแถบด้านข้างด้านบนและแถบด้านข้างด้านล่างทีละด้าน
สายไฟด้านข้างด้านบน
$$ P_ {USB} = \ frac {\ left (A_mA_c / 2 \ sqrt {2} \ right) ^ 2} {R} = \ frac {{A_ {m}} ^ {2} {A_ {c}} ^ {2}} {8R} $$
ในทำนองเดียวกันเราจะได้รับพลังไซด์แบนด์ที่ต่ำกว่าเช่นเดียวกับกำลังไฟไซด์แบนด์ด้านบน
$$ P_ {USB} = \ frac {{A_ {m}} ^ {2} {A_ {c}} ^ {2}} {8R} $$
ตอนนี้ให้เราเพิ่มพลังไซด์แบนด์ทั้งสองนี้เพื่อรับพลังของคลื่น DSBSC
$$ P_t = \ frac {{A_ {m}} ^ {2} {A_ {c}} ^ {2}} {8R} + \ frac {{A_ {m}} ^ {2} {A_ {c} } ^ {2}} {8R} $$
$$ \ Rightarrow P_t = \ frac {{A_ {m}} ^ {2} {A_ {c}} ^ {2}} {4R} $$
ดังนั้นกำลังที่ต้องใช้ในการส่งคลื่น DSBSC จึงเท่ากับกำลังของไซด์แบนด์ทั้งสอง
ในบทนี้ให้เราพูดคุยเกี่ยวกับโมดูเลเตอร์ซึ่งสร้างคลื่น DSBSC โมดูเลเตอร์สองตัวต่อไปนี้สร้างคลื่น DSBSC
- โมดูเลเตอร์ที่สมดุล
- โมดูเลเตอร์แหวน
โมดูเลเตอร์ที่สมดุล
ต่อไปนี้เป็นแผนภาพบล็อกของโมดูเลเตอร์สมดุล

Balanced modulatorประกอบด้วยโมดูเลเตอร์ AM ที่เหมือนกันสองตัว โมดูเลเตอร์ทั้งสองนี้ถูกจัดเรียงในโครงร่างที่สมดุลเพื่อยับยั้งสัญญาณพาหะ ดังนั้นจึงเรียกว่าโมดูเลเตอร์สมดุล
สัญญาณพาหะเดียวกัน $ c \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) $ ถูกนำไปใช้เป็นหนึ่งในอินพุทสำหรับโมดูเลเตอร์ AM สองตัวนี้ สัญญาณมอดูเลต $ m \ left (t \ right) $ ถูกนำไปใช้เป็นอินพุทอื่นกับโมดูเลเตอร์ AM บน ในขณะที่สัญญาณมอดูเลต $ m \ left (t \ right) $ ที่มีขั้วตรงข้ามเช่น $ -m \ left (t \ right) $ ถูกนำไปใช้เป็นอินพุตอื่นไปยังตัวปรับ AM ที่ต่ำกว่า
เอาต์พุตของโมดูเลเตอร์ AM ด้านบนคือ
$$ s_1 \ left (t \ right) = A_c \ left [1 + k_am \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $$
เอาต์พุตของโมดูเลเตอร์ AM ที่ต่ำกว่าคือ
$$ s_2 \ left (t \ right) = A_c \ left [1-k_am \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $$
เราได้รับคลื่น DSBSC $ s \ left (t \ right) $ โดยการลบ $ s_2 \ left (t \ right) $ จาก $ s_1 \ left (t \ right) $ บล็อกฤดูร้อนใช้เพื่อดำเนินการนี้ $ s_1 \ left (t \ right) $ ที่มีเครื่องหมายบวกและ $ s_2 \ left (t \ right) $ ที่มีเครื่องหมายลบถูกนำไปใช้เป็นอินพุตสำหรับบล็อกฤดูร้อน ดังนั้นบล็อกฤดูร้อนจะสร้างเอาต์พุต $ s \ left (t \ right) $ ซึ่งเป็นผลต่างของ $ s_1 \ left (t \ right) $ และ $ s_2 \ left (t \ right) $
$$ \ Rightarrow s \ left (t \ right) = A_c \ left [1 + k_am \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) -A_c \ left [1-k_am \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $$
$$ \ Rightarrow s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) + A_ck_am \ left (t \ right) \ cos \ left (2 \ pi f_ct \ right) - A_c \ cos \ left (2 \ pi f_ct \ right) + $$
$ A_ck_am \ left (t \ right) \ cos \ left (2 \ pi f_ct \ right) $
$ \ Rightarrow s \ left (t \ right) = 2A_ck_am \ left (t \ right) \ cos \ left (2 \ pi f_ct \ right) $
เรารู้ว่าสมการมาตรฐานของคลื่น DSBSC คือ
$$ s \ left (t \ right) = A_cm \ left (t \ right) \ cos \ left (2 \ pi f_ct \ right) $$
เมื่อเปรียบเทียบผลลัพธ์ของบล็อกฤดูร้อนกับสมการมาตรฐานของคลื่น DSBSC เราจะได้ค่ามาตราส่วนเป็น $ 2k_a $
Ring Modulator
ต่อไปนี้เป็นแผนภาพบล็อกของโมดูเลเตอร์ Ring

ในแผนภาพนี้ไดโอดสี่ตัว $ D_1 $, $ D_2 $, $ D_3 $ และ $ D_4 $ เชื่อมต่อกันในโครงสร้างวงแหวน ดังนั้นโมดูเลเตอร์นี้จึงเรียกว่าring modulator. แผนภาพนี้ใช้หม้อแปลงแบบเคาะตรงกลางสองตัว สัญญาณข้อความ $ m \ left (t \ right) $ ถูกนำไปใช้กับหม้อแปลงอินพุต ในขณะที่ผู้ให้บริการสัญญาณ $ c \ left (t \ right) $ ถูกนำไปใช้ระหว่างหม้อแปลงสองตัวที่มีศูนย์กลาง
สำหรับครึ่งวงจรบวกของสัญญาณพาหะไดโอด $ D_1 $ และ $ D_3 $ จะถูกเปิดและอีกสองไดโอด $ D_2 $ และ $ D_4 $ จะปิด ในกรณีนี้สัญญาณข้อความจะคูณด้วย +1
สำหรับครึ่งรอบที่เป็นลบของสัญญาณพาหะไดโอด $ D_2 $ และ $ D_4 $ จะถูกเปิดและอีกสองไดโอด $ D_1 $ และ $ D_3 $ จะถูกปิด ในกรณีนี้สัญญาณข้อความจะคูณด้วย -1 ส่งผลให้เกิดการเปลี่ยนเฟส $ 180 ^ 0 $ ในคลื่น DSBSC ที่เป็นผลลัพธ์
จากการวิเคราะห์ข้างต้นเราสามารถพูดได้ว่าไดโอดสี่ตัว $ D_1 $, $ D_2 $, $ D_3 $ และ $ D_4 $ ถูกควบคุมโดยสัญญาณพาหะ หากพาหะเป็นคลื่นสี่เหลี่ยมการแสดงอนุกรมฟูริเยร์ของ $ c \ left (t \ right) $ จะแสดงเป็น
$$ c \ left (t \ right) = \ frac {4} {\ pi} \ sum_ {n = 1} ^ {\ infty} \ frac {\ left (-1 \ right) ^ {n-1}} {2n-1} \ cos \ left [2 \ pi f_ct \ left (2n-1 \ right) \ right] $$
เราจะได้ DSBSC wave $ s \ left (t \ right) $ ซึ่งเป็นเพียงผลคูณของสัญญาณผู้ให้บริการ $ c \ left (t \ right) $ และสัญญาณข้อความ $ m \ left (t \ right) $ ie ,
$$ s \ left (t \ right) = \ frac {4} {\ pi} \ sum_ {n = 1} ^ {\ infty} \ frac {\ left (-1 \ right) ^ {n-1}} {2n-1} \ cos \ left [2 \ pi f_ct \ left (2n-1 \ right) \ right] m \ left (t \ right) $$
สมการข้างต้นแสดงถึงคลื่น DSBSC ซึ่งได้มาจากหม้อแปลงเอาท์พุทของโมดูเลเตอร์วงแหวน
DSBSC modulators เรียกอีกอย่างว่า product modulators ในขณะที่ผลิตเอาต์พุตซึ่งเป็นผลคูณของสัญญาณอินพุตสองสัญญาณ
กระบวนการแยกสัญญาณข้อความต้นฉบับจากคลื่น DSBSC เรียกว่าการตรวจจับหรือการแยกสัญญาณของ DSBSC Demodulators (ตัวตรวจจับ) ต่อไปนี้ใช้สำหรับ demodulating DSBSC wave
- เครื่องตรวจจับที่สอดคล้องกัน
- ห่วงคอสตาส
เครื่องตรวจจับที่สอดคล้องกัน
ที่นี่สัญญาณพาหะเดียวกัน (ซึ่งใช้สำหรับสร้างสัญญาณ DSBSC) ถูกใช้เพื่อตรวจจับสัญญาณข้อความ ดังนั้นกระบวนการตรวจจับนี้จึงเรียกว่าcoherent หรือ synchronous detection. ต่อไปนี้เป็นแผนภาพบล็อกของเครื่องตรวจจับที่สอดคล้องกัน

ในกระบวนการนี้สัญญาณข้อความสามารถแยกออกจากคลื่น DSBSC ได้โดยการคูณกับตัวพาที่มีความถี่เดียวกันและเฟสของพาหะที่ใช้ในการมอดูเลต DSBSC จากนั้นสัญญาณที่ได้จะถูกส่งผ่าน Low Pass Filter เอาต์พุตของตัวกรองนี้คือสัญญาณข้อความที่ต้องการ
ให้คลื่น DSBSC เป็น
$$ s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) m \ left (t \ right) $$
เอาต์พุตของออสซิลเลเตอร์ท้องถิ่นคือ
$$ c \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct + \ phi \ right) $$
โดยที่ $ \ phi $ คือความแตกต่างของเฟสระหว่างสัญญาณออสซิลเลเตอร์ท้องถิ่นและสัญญาณพาหะซึ่งใช้สำหรับการมอดูเลต DSBSC
จากรูปเราสามารถเขียนผลลัพธ์ของโมดูเลเตอร์ผลิตภัณฑ์เป็น
$$ v \ left (t \ right) = s \ left (t \ right) c \ left (t \ right) $$
แทนค่า $ s \ left (t \ right) $ และ $ c \ left (t \ right) $ ในสมการด้านบน
$$ \ Rightarrow v \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) m \ left (t \ right) A_c \ cos \ left (2 \ pi f_ct + \ phi \ right) $$
$ = {A_ {c}} ^ {2} \ cos \ left (2 \ pi f_ct \ right) \ cos \ left (2 \ pi f_ct + \ phi \ right) m \ left (t \ right) $
$ = \ frac {{A_ {c}} ^ {2}} {2} \ left [\ cos \ left (4 \ pi f_ct + \ phi \ right) + \ cos \ phi \ right] m \ left (t \ ขวา) $
$$ v \ left (t \ right) = \ frac {{A_ {c}} ^ {2}} {2} \ cos \ phi m \ left (t \ right) + \ frac {{A_ {c}} ^ {2}} {2} \ cos \ left (4 \ pi f_ct + \ phi \ right) m \ left (t \ right) $$
ในสมการข้างต้นเทอมแรกคือสัญญาณข้อความในเวอร์ชันที่ปรับขนาดแล้ว สามารถสกัดได้โดยส่งสัญญาณข้างต้นผ่านตัวกรองความถี่ต่ำ
ดังนั้นผลลัพธ์ของตัวกรองความถี่ต่ำคือ
$$ v_0t = \ frac {{A_ {c}} ^ {2}} {2} \ cos \ phi m \ left (t \ right) $$
แอมพลิจูดของสัญญาณ demodulated จะสูงสุดเมื่อ $ \ phi = 0 ^ 0 $ นั่นเป็นเหตุผลที่สัญญาณออสซิลเลเตอร์ท้องถิ่นและสัญญาณพาหะควรอยู่ในเฟสกล่าวคือไม่ควรมีความแตกต่างของเฟสระหว่างสัญญาณทั้งสองนี้
แอมพลิจูดของสัญญาณ demodulated จะเป็นศูนย์เมื่อ $ \ phi = \ pm 90 ^ 0 $ เอฟเฟกต์นี้เรียกว่าquadrature null effect.
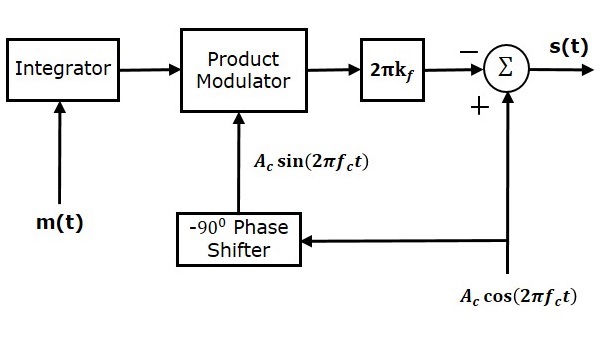
ห่วงคอสตาส
Costas loop ใช้เพื่อสร้างทั้งสัญญาณพาหะ (ใช้สำหรับการมอดูเลต DSBSC) และสัญญาณที่สร้างขึ้นในเครื่องในเฟส ต่อไปนี้เป็นแผนภาพบล็อกของ Costas loop

Costas loopประกอบด้วยโมดูเลเตอร์ผลิตภัณฑ์สองตัวที่มีอินพุตทั่วไป $ s \ left (t \ right) $ ซึ่งเป็นคลื่น DSBSC อินพุตอื่นสำหรับโมดูเลเตอร์ผลิตภัณฑ์ทั้งสองถูกนำมาจากVoltage Controlled Oscillator (VCO) โดยมีการเปลี่ยนเฟส $ -90 ^ 0 $ เป็นหนึ่งในโมดูเลเตอร์ของผลิตภัณฑ์ดังแสดงในรูป
เรารู้ว่าสมการของคลื่น DSBSC คือ
$$ s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) m \ left (t \ right) $$
ให้เอาต์พุตของ VCO เป็น
$$ c_1 \ left (t \ right) = \ cos \ left (2 \ pi f_ct + \ phi \ right) $$
เอาต์พุตของ VCO นี้ถูกนำไปใช้เป็นอินพุตตัวพาของโมดูเลเตอร์ผลิตภัณฑ์ด้านบน
ดังนั้นผลลัพธ์ของโมดูเลเตอร์ผลิตภัณฑ์ด้านบนคือ
$$ v_1 \ left (t \ right) = s \ left (t \ right) c_1 \ left (t \ right) $$
แทนค่า $ s \ left (t \ right) $ และ $ c_1 \ left (t \ right) $ ในสมการด้านบน
$$ \ Rightarrow v_1 \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) m \ left (t \ right) \ cos \ left (2 \ pi f_ct + \ phi \ right) $ $
หลังจากทำให้เข้าใจง่ายเราจะได้ $ v_1 \ left (t \ right) $ as
$$ v_1 \ left (t \ right) = \ frac {A_c} {2} \ cos \ phi m \ left (t \ right) + \ frac {A_c} {2} \ cos \ left (4 \ pi f_ct + \ phi \ right) m \ left (t \ right) $$
สัญญาณนี้ใช้เป็นอินพุตของตัวกรองความถี่ต่ำบน ผลลัพธ์ของตัวกรองความถี่ต่ำนี้คือ
$$ v_ {01} \ left (t \ right) = \ frac {A_c} {2} \ cos \ phi m \ left (t \ right) $$
ดังนั้นเอาต์พุตของตัวกรองความถี่ต่ำนี้จึงเป็นสัญญาณมอดูเลตแบบปรับขนาด
ผลลัพธ์ของตัวเปลี่ยนเฟส $ -90 ^ 0 $ คือ
$$ c_2 \ left (t \ right) = cos \ left (2 \ pi f_ct + \ phi-90 ^ 0 \ right) = \ sin \ left (2 \ pi f_ct + \ phi \ right) $$
สัญญาณนี้ถูกนำไปใช้เป็นอินพุตผู้ให้บริการของโมดูเลเตอร์ผลิตภัณฑ์ด้านล่าง
ผลลัพธ์ของโมดูเลเตอร์ผลิตภัณฑ์ที่ต่ำกว่าคือ
$$ v_2 \ left (t \ right) = s \ left (t \ right) c_2 \ left (t \ right) $$
แทนค่า $ s \ left (t \ right) $ และ $ c_2 \ left (t \ right) $ ในสมการด้านบน
$$ \ Rightarrow v_2 \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) m \ left (t \ right) \ sin \ left (2 \ pi f_ct + \ phi \ right) $ $
หลังจากทำให้เข้าใจง่ายเราจะได้ $ v_2 \ left (t \ right) $ as
$$ v_2 \ left (t \ right) = \ frac {A_c} {2} \ sin \ phi m \ left (t \ right) + \ frac {A_c} {2} \ sin \ left (4 \ pi f_ct + \ phi \ right) m \ left (t \ right) $$
สัญญาณนี้ใช้เป็นอินพุตของตัวกรองความถี่ต่ำที่ต่ำกว่า ผลลัพธ์ของตัวกรองความถี่ต่ำนี้คือ
$$ v_ {02} \ left (t \ right) = \ frac {A_c} {2} \ sin \ phi m \ left (t \ right) $$
เอาต์พุตของตัวกรองความถี่ต่ำนี้มีความแตกต่างของเฟส $ -90 ^ 0 $ กับเอาต์พุตของตัวกรองความถี่ต่ำบน
เอาต์พุตของตัวกรองความถี่ต่ำทั้งสองนี้ถูกนำไปใช้เป็นอินพุตของตัวแยกแยะเฟส จากความแตกต่างของเฟสระหว่างสัญญาณทั้งสองนี้ตัวแยกแยะเฟสจะสร้างสัญญาณควบคุม DC
สัญญาณนี้ใช้เป็นอินพุตของ VCO เพื่อแก้ไขข้อผิดพลาดของเฟสในเอาต์พุต VCO ดังนั้นสัญญาณพาหะ (ใช้สำหรับการมอดูเลต DSBSC) และสัญญาณที่สร้างขึ้นภายในเครื่อง (เอาต์พุต VCO) จึงอยู่ในเฟส
ในบทก่อนหน้านี้เราได้กล่าวถึงการมอดูเลตและการดีมอดูเลต DSBSC สัญญาณมอดูเลต DSBSC มีแถบด้านข้างสองแถบ เนื่องจากไซด์แบนด์ทั้งสองมีข้อมูลเดียวกันจึงไม่จำเป็นต้องส่งไซด์แบนด์ทั้งสอง เราสามารถกำจัดไซด์แบนด์ได้หนึ่งช่อง
กระบวนการระงับไซด์แบนด์ด้านใดด้านหนึ่งพร้อมกับผู้ให้บริการและการส่งไซด์แบนด์เดียวเรียกว่าเป็น Single Sideband Suppressed Carrier ระบบหรือง่ายๆ SSBSC. มันถูกพล็อตดังแสดงในรูปต่อไปนี้

ในรูปด้านบนตัวยึดและแถบด้านข้างด้านล่างจะถูกระงับ ดังนั้นแถบด้านข้างด้านบนจึงใช้ในการส่งสัญญาณ ในทำนองเดียวกันเราสามารถระงับผู้ให้บริการและแถบด้านข้างด้านบนในขณะที่ส่งแถบด้านข้างด้านล่าง
ระบบ SSBSC นี้ซึ่งส่งสัญญาณไซด์แบนด์เดียวมีกำลังสูงเนื่องจากกำลังไฟที่จัดสรรให้ทั้งผู้ให้บริการและแถบด้านข้างอื่น ๆ จะถูกใช้ในการส่งสัญญาณ Single Sideband นี้
นิพจน์ทางคณิตศาสตร์
ให้เราพิจารณานิพจน์ทางคณิตศาสตร์เดียวกันสำหรับการมอดูเลตและสัญญาณพาหะตามที่เราได้พิจารณาในบทก่อนหน้านี้
กล่าวคือสัญญาณมอดูเลต
$$ m \ left (t \ right) = A_m \ cos \ left (2 \ pi f_mt \ right) $$
สัญญาณผู้ให้บริการ
$$ c \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) $$
ในทางคณิตศาสตร์เราสามารถแทนสมการของคลื่น SSBSC เป็น
$ s \ left (t \ right) = \ frac {A_mA_c} {2} \ cos \ left [2 \ pi \ left (f_c + f_m \ right) t \ right] $ สำหรับแถบด้านข้างด้านบน
หรือ
$ s \ left (t \ right) = \ frac {A_mA_c} {2} \ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] $ สำหรับแถบด้านข้างด้านล่าง
แบนด์วิดท์ของ SSBSC Wave
เราทราบว่าคลื่นที่มอดูเลต DSBSC มีแถบด้านข้างสองแถบและแบนด์วิดท์คือ $ 2f_m $ เนื่องจากคลื่นมอดูเลต SSBSC มีแถบด้านข้างเพียงด้านเดียวแบนด์วิดท์จึงเป็นครึ่งหนึ่งของแบนด์วิดท์ของคลื่นมอดูเลต DSBSC
กล่าวคือ Bandwidth of SSBSC modulated wave = $ \ frac {2f_m} {2} = f_m $
ดังนั้นแบนด์วิดท์ของคลื่นมอดูเลต SSBSC คือ $ f_m $ และเท่ากับความถี่ของสัญญาณมอดูเลต
การคำนวณกำลังของ SSBSC Wave
พิจารณาสมการต่อไปนี้ของคลื่นมอดูเลต SSBSC
$ s \ left (t \ right) = \ frac {A_mA_c} {2} \ cos \ left [2 \ pi \ left (f_c + f_m \ right) t \ right] $ สำหรับแถบด้านข้างด้านบน
หรือ
$ s \ left (t \ right) = \ frac {A_mA_c} {2} \ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] $ สำหรับแถบด้านข้างด้านล่าง
พลังของคลื่น SSBSC เท่ากับพลังของส่วนประกอบความถี่ไซด์แบนด์ใด ๆ
$$ P_t = P_ {USB} = P_ {LSB} $$
เรารู้ว่าสูตรมาตรฐานสำหรับพลังของสัญญาณ cos คือ
$$ P = \ frac {{v_ {rms}} ^ {2}} {R} = \ frac {\ left (v_m / \ sqrt {2} \ right) ^ 2} {R} $$
ในกรณีนี้พลังของไซด์แบนด์ด้านบนคือ
$$ P_ {USB} = \ frac {\ left (A_m A_c / 2 \ sqrt {2} \ right) ^ 2} {R} = \ frac {{A_ {m}} ^ {2} {A_ {c} } ^ {2}} {8R} $$
ในทำนองเดียวกันเราจะได้รับพลังงานแถบด้านข้างที่ต่ำกว่าเช่นเดียวกับกำลังของแถบด้านบน
$$ P_ {LSB} = \ frac {{A_ {m}} ^ {2} {A_ {c}} ^ {2}} {8R} $$
ดังนั้นพลังของคลื่น SSBSC คือ
$$ P_t = P_ {USB} = P_ {LSB} = \ frac {{A_ {m}} ^ {2} {A_ {c}} ^ {2}} {8R} $$
ข้อดี
แบนด์วิดท์หรือพื้นที่สเปกตรัมที่ใช้งานน้อยกว่าคลื่น AM และ DSBSC
อนุญาตให้ส่งสัญญาณจำนวนมากขึ้น
ประหยัดพลังงาน
สามารถส่งสัญญาณกำลังสูงได้
มีเสียงรบกวนน้อยลง
การซีดจางของสัญญาณมีโอกาสน้อยที่จะเกิดขึ้น
ข้อเสีย
การสร้างและตรวจจับคลื่น SSBSC เป็นกระบวนการที่ซับซ้อน
คุณภาพของสัญญาณจะได้รับผลกระทบเว้นแต่ตัวส่งและตัวรับ SSB จะมีเสถียรภาพความถี่ที่ดีเยี่ยม
การใช้งาน
สำหรับความต้องการประหยัดพลังงานและความต้องการแบนด์วิดท์ต่ำ
ในการสื่อสารเคลื่อนที่ทางบกทางอากาศและทางทะเล
ในการสื่อสารแบบจุดต่อจุด
ในการสื่อสารทางวิทยุ.
ในการสื่อสารทางโทรทัศน์โทรมาตรและเรดาร์
ด้านการสื่อสารทางทหารเช่นวิทยุสมัครเล่นเป็นต้น
ในบทนี้ให้เราพูดคุยเกี่ยวกับโมดูเลเตอร์ซึ่งสร้างคลื่น SSBSC เราสามารถสร้างคลื่น SSBSC โดยใช้สองวิธีต่อไปนี้
- วิธีการแยกแยะความถี่
- วิธีการแยกแยะเฟส
วิธีการแยกแยะความถี่
รูปต่อไปนี้แสดงแผนภาพบล็อกของโมดูเลเตอร์ SSBSC โดยใช้วิธีการแยกแยะความถี่

ในวิธีนี้อันดับแรกเราจะสร้างคลื่น DSBSC ด้วยความช่วยเหลือของโมดูเลเตอร์ผลิตภัณฑ์ จากนั้นใช้ DSBSC wave เป็นอินพุตของ band pass filter แบนด์พาสฟิลเตอร์สร้างเอาต์พุตซึ่งเป็นคลื่น SSBSC
เลือกช่วงความถี่ของแบนด์พาสฟิลเตอร์เป็นสเปกตรัมของคลื่น SSBSC ที่ต้องการ ซึ่งหมายความว่าตัวกรองแบนด์พาสสามารถปรับเป็นความถี่ไซด์แบนด์ด้านบนหรือด้านล่างเพื่อให้ได้คลื่น SSBSC ตามลำดับที่มีแถบด้านข้างด้านบนหรือด้านล่าง
วิธีการแยกแยะเฟส
รูปต่อไปนี้แสดงแผนภาพบล็อกของโมดูเลเตอร์ SSBSC โดยใช้วิธีการแยกแยะเฟส

แผนภาพบล็อกนี้ประกอบด้วยโมดูเลเตอร์ของผลิตภัณฑ์สองตัวตัวเปลี่ยนเฟส $ -90 ^ 0 $ สองตัวออสซิลเลเตอร์ในตัวหนึ่งตัวและบล็อกฤดูร้อนหนึ่งบล็อก โมดูเลเตอร์ผลิตภัณฑ์สร้างเอาต์พุตซึ่งเป็นผลคูณของอินพุตสองตัว ตัวเปลี่ยนเฟส $ -90 ^ 0 $ สร้างเอาต์พุตซึ่งมีความล่าช้าของเฟส $ -90 ^ 0 $ เมื่อเทียบกับอินพุต
ออสซิลเลเตอร์ท้องถิ่นใช้ในการสร้างสัญญาณพาหะ บล็อกฤดูร้อนสร้างเอาต์พุตซึ่งเป็นผลรวมของอินพุตสองอินพุตหรือผลต่างของอินพุตสองอินพุตตามขั้วของอินพุต
สัญญาณมอดูเลต $ A_m \ cos \ left (2 \ pi f_mt \ right) $ และสัญญาณผู้ให้บริการ $ A_c \ cos \ left (2 \ pi f_ct \ right) $ จะถูกนำไปใช้โดยตรงเป็นอินพุตไปยังโมดูเลเตอร์ผลิตภัณฑ์ด้านบน ดังนั้นโมดูเลเตอร์ผลิตภัณฑ์ด้านบนจึงสร้างเอาต์พุตซึ่งเป็นผลคูณของอินพุตทั้งสองนี้
ผลลัพธ์ของโมดูเลเตอร์ผลิตภัณฑ์ส่วนบนคือ
$$ s_1 \ left (t \ right) = A_mA_c \ cos \ left (2 \ pi f_mt \ right) \ cos \ left (2 \ pi f_ct \ right) $$
$$ \ Rightarrow s_1 \ left (t \ right) = \ frac {A_mA_c} {2} \ left \ {\ cos \ left [2 \ pi \ left (f_c + f_m \ right) t \ right] + \ cos \ ซ้าย [2 \ pi \ left (f_c-f_m \ right) t \ right] \ right \} $$
สัญญาณมอดูเลต $ A_m \ cos \ left (2 \ pi f_mt \ right) $ และสัญญาณพาหะ $ A_c \ cos \ left (2 \ pi f_ct \ right) $ ถูกเลื่อนเฟสโดย $ -90 ^ 0 $ ก่อนที่จะใช้เป็น อินพุตไปยังโมดูเลเตอร์ผลิตภัณฑ์ที่ต่ำกว่า ดังนั้นโมดูเลเตอร์ผลิตภัณฑ์ที่ต่ำกว่าจึงสร้างเอาต์พุตซึ่งเป็นผลคูณของอินพุตทั้งสองนี้
ผลลัพธ์ของโมดูเลเตอร์ผลิตภัณฑ์ที่ต่ำกว่าคือ
$$ s_2 \ left (t \ right) = A_mA_c \ cos \ left (2 \ pi f_mt-90 ^ 0 \ right) \ cos \ left (2 \ pi f_ct-90 ^ 0 \ right) $$
$ \ Rightarrow s_2 \ left (t \ right) = A_mA_c \ sin \ left (2 \ pi f_mt \ right) \ sin \ left (2 \ pi f_ct \ right) $
$ \ Rightarrow s_2 \ left (t \ right) = \ frac {A_mA_c} {2} \ left \ {\ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] - \ cos \ left [2 \ pi \ left (f_c + f_m \ right) t \ right] \ right \} $
เพิ่ม $ s_1 \ left (t \ right) $ และ $ s_2 \ left (t \ right) $ เพื่อให้ได้ SSBSC modulated wave $ s \ left (t \ right) $ ที่มีแถบด้านข้างที่ต่ำกว่า
$ s \ left (t \ right) = \ frac {A_mA_c} {2} \ left \ {\ cos \ left [2 \ pi \ left (f_c + f_m \ right) t \ right] + \ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] \ right \} + $
$ \ frac {A_mA_c} {2} \ left \ {\ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] - \ cos \ left [2 \ pi \ left (f_c + f_m \ ขวา) t \ right] \ right \} $
$ \ Rightarrow s \ left (t \ right) = A_mA_c \ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] $
ลบ $ s_2 \ left (t \ right) $ จาก $ s_1 \ left (t \ right) $ เพื่อที่จะได้ SSBSC modulated wave $ s \ left (t \ right) $ ที่มีแถบด้านข้างด้านบน
$ s \ left (t \ right) = \ frac {A_mA_c} {2} \ left \ {\ cos \ left [2 \ pi \ left (f_c + f_m \ right) t \ right] + \ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] \ right \} - $
$ \ frac {A_mA_c} {2} \ left \ {\ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] - \ cos \ left [2 \ pi \ left (f_c + f_m \ ขวา) t \ right] \ right \} $
$ \ Rightarrow s \ left (t \ right) = A_mA_c \ cos \ left [2 \ pi \ left (f_c + f_m \ right) t \ right] $
ดังนั้นโดยการเลือกขั้วของอินพุตอย่างถูกต้องในช่วงฤดูร้อนเราจะได้คลื่น SSBSC ที่มีแถบด้านข้างบนหรือแถบด้านข้างที่ต่ำกว่า
กระบวนการแยกสัญญาณข้อความต้นฉบับจากคลื่น SSBSC เรียกว่าการตรวจจับหรือการถอดรหัส SSBSC Coherent detector ใช้สำหรับ demodulating SSBSC wave
เครื่องตรวจจับที่สอดคล้องกัน
ที่นี่สัญญาณพาหะเดียวกัน (ซึ่งใช้สำหรับสร้างคลื่น SSBSC) ถูกใช้เพื่อตรวจจับสัญญาณข้อความ ดังนั้นกระบวนการตรวจจับนี้จึงเรียกว่าcoherent หรือ synchronous detection. ต่อไปนี้เป็นแผนภาพบล็อกของเครื่องตรวจจับที่สอดคล้องกัน

ในกระบวนการนี้สัญญาณข้อความสามารถแยกออกจากคลื่น SSBSC ได้โดยการคูณกับตัวพาที่มีความถี่เดียวกันและเฟสของพาหะที่ใช้ในการมอดูเลต SSBSC จากนั้นสัญญาณที่ได้จะถูกส่งผ่าน Low Pass Filter เอาต์พุตของตัวกรองนี้คือสัญญาณข้อความที่ต้องการ
พิจารณาสิ่งต่อไปนี้ SSBSC คลื่นที่มี lower sideband.
$$ s \ left (t \ right) = \ frac {A_mA_c} {2} \ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] $$
เอาต์พุตของออสซิลเลเตอร์ท้องถิ่นคือ
$$ c \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) $$
จากรูปเราสามารถเขียนผลลัพธ์ของโมดูเลเตอร์ผลิตภัณฑ์เป็น
$$ v \ left (t \ right) = s \ left (t \ right) c \ left (t \ right) $$
แทนค่า $ s \ left (t \ right) $ และ $ c \ left (t \ right) $ ในสมการด้านบน
$$ v \ left (t \ right) = \ frac {A_mA_c} {2} \ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] A_c \ cos \ left (2 \ pi f_ct \ right) $$
$ = \ frac {A_m {A_ {c}} ^ {2}} {2} \ cos \ left [2 \ pi \ left (f_c -f_m \ right) t \ right] \ cos \ left (2 \ pi f_ct \ right) $
$ = \ frac {A_m {A_ {c}} ^ {2}} {4} \ left \ {\ cos \ left [2 \ pi \ left (2f_c-fm \ right) \ right] + \ cos \ left ( 2 \ pi f_m \ right) t \ right \} $
$ v \ left (t \ right) = \ frac {A_m {A_ {c}} ^ {2}} {4} \ cos \ left (2 \ pi f_mt \ right) + \ frac {A_m {A_ {c} } ^ {2}} {4} \ cos \ left [2 \ pi \ left (2f_c-f_m \ right) t \ right] $
ในสมการข้างต้นเทอมแรกคือสัญญาณข้อความในเวอร์ชันที่ปรับขนาดแล้ว สามารถสกัดได้โดยส่งสัญญาณข้างต้นผ่านตัวกรองความถี่ต่ำ
ดังนั้นผลลัพธ์ของตัวกรองความถี่ต่ำคือ
$$ v_0 \ left (t \ right) = \ frac {A_m {A_ {c}} ^ {2}} {4} \ cos \ left (2 \ pi f_mt \ right) $$
ที่นี่ตัวคูณมาตราส่วนคือ $ \ frac {{A_ {c}} ^ {2}} {4} $
เราสามารถใช้แผนภาพบล็อกเดียวกันสำหรับการแยกสัญญาณ SSBSC wave ที่มีแถบด้านข้างด้านบน พิจารณาสิ่งต่อไปนี้SSBSC คลื่นที่มี upper sideband.
$$ s \ left (t \ right) = \ frac {A_mA_c} {2} \ cos \ left [2 \ pi \ left (f_c + f_m \ right) t \ right] $$
เอาต์พุตของออสซิลเลเตอร์ท้องถิ่นคือ
$$ c \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) $$
เราสามารถเขียนผลลัพธ์ของโมดูเลเตอร์ผลิตภัณฑ์เป็น
$$ v \ left (t \ right) = s \ left (t \ right) c \ left (t \ right) $$
แทนค่า $ s \ left (t \ right) $ และ $ c \ left (t \ right) $ ในสมการด้านบน
$$ \ Rightarrow v \ left (t \ right) = \ frac {A_mA_c} {2} \ cos \ left [2 \ pi \ left (f_c + f_m \ right) t \ right] A_c \ cos \ left (2 \ pi f_ct \ right) $$
$ = \ frac {A_m {A_ {c}} ^ {2}} {2} \ cos \ left [2 \ pi \ left (f_c + f_m \ right) t \ right] \ cos \ left (2 \ pi f_ct \ right) $
$ = \ frac {A_m {A_ {c}} ^ {2}} {4} \ left \ {\ cos \ left [2 \ pi \ left (2f_c + f_m \ right) t \ right] + \ cos \ left (2 \ pi f_mt \ right) \ right \} $
$ v \ left (t \ right) = \ frac {A_m {A_ {c}} ^ {2}} {4} \ cos \ left (2 \ pi f_mt \ right) + \ frac {A_m {A_ {c} } ^ {2}} {4} \ cos \ left [2 \ pi \ left (2f_c + f_m \ right) t \ right] $
ในสมการข้างต้นเทอมแรกคือสัญญาณข้อความในเวอร์ชันที่ปรับขนาดแล้ว สามารถสกัดได้โดยส่งสัญญาณข้างต้นผ่านตัวกรองความถี่ต่ำ
ดังนั้นผลลัพธ์ของตัวกรองความถี่ต่ำคือ
$$ v_0 \ left (t \ right) = \ frac {A_m {A_ {c}} ^ {2}} {4} \ cos \ left (2 \ pi f_mt \ right) $$
ปัจจัยการปรับขนาดก็เช่นกันคือ $ \ frac {{A_ {c}} ^ {2}} {4} $
ดังนั้นเราจึงได้รับเอาต์พุต demodulated เดียวกันในทั้งสองกรณีโดยใช้เครื่องตรวจจับที่สอดคล้องกัน
ในบทก่อนหน้านี้เราได้กล่าวถึงการมอดูเลต SSBSC และการดีมอดูเลต สัญญาณมอดูเลต SSBSC มีความถี่ไซด์แบนด์เดียว ในทางทฤษฎีเราสามารถหาส่วนประกอบความถี่ไซด์แบนด์ได้อย่างสมบูรณ์โดยใช้ตัวกรองแบนด์พาสในอุดมคติ อย่างไรก็ตามในทางปฏิบัติเราอาจไม่ได้รับส่วนประกอบความถี่ไซด์แบนด์ทั้งหมด ด้วยเหตุนี้ข้อมูลบางส่วนจึงสูญหายไป
เพื่อหลีกเลี่ยงการสูญเสียนี้จึงเลือกใช้เทคนิคซึ่งเป็นการประนีประนอมระหว่าง DSBSC และ SSBSC เทคนิคนี้เรียกว่าVestigial Side Band Suppressed Carrier (VSBSC)เทคนิค. คำว่า "ร่องรอย" หมายถึง "ส่วนหนึ่ง" ซึ่งมาจากชื่อนี้
VSBSC Modulationเป็นกระบวนการที่ส่วนหนึ่งของสัญญาณที่เรียกว่า vestige ถูกมอดูเลตพร้อมกับแถบด้านข้างหนึ่ง สเปกตรัมความถี่ของคลื่น VSBSC แสดงดังรูปต่อไปนี้

นอกเหนือจากแถบด้านข้างด้านบนแล้วส่วนหนึ่งของแถบด้านข้างด้านล่างจะถูกส่งไปในเทคนิคนี้ด้วย ในทำนองเดียวกันเราสามารถส่งแถบด้านข้างด้านล่างพร้อมกับส่วนหนึ่งของแถบด้านข้างด้านบน แถบป้องกันที่มีความกว้างน้อยมากวางไว้ที่ด้านใดด้านหนึ่งของ VSB เพื่อหลีกเลี่ยงการรบกวน การมอดูเลต VSB ส่วนใหญ่จะใช้ในการส่งสัญญาณโทรทัศน์
แบนด์วิดท์ของการมอดูเลต VSBSC
เราทราบว่าแบนด์วิดท์ของคลื่นมอดูเลต SSBSC คือ $ f_m $ เนื่องจากคลื่นมอดูเลต VSBSC มีส่วนประกอบความถี่ของแถบด้านหนึ่งพร้อมกับร่องรอยของแถบด้านข้างอื่น ๆ แบนด์วิดท์ของมันจะเป็นผลรวมของแบนด์วิดท์ของคลื่นมอดูเลต SSBSC และความถี่ร่องรอย $ f_v $
i.e., Bandwidth of VSBSC Modulated Wave = $f_m + f_v$
ข้อดี
ต่อไปนี้เป็นข้อดีของการมอดูเลต VSBSC
มีประสิทธิภาพสูง
ลดแบนด์วิดท์เมื่อเทียบกับคลื่น AM และ DSBSC
การออกแบบตัวกรองทำได้ง่ายเนื่องจากไม่ต้องการความแม่นยำสูง
การส่งส่วนประกอบความถี่ต่ำทำได้โดยไม่มีปัญหาใด ๆ
มีลักษณะเฟสที่ดี
ข้อเสีย
ต่อไปนี้เป็นข้อเสียของการมอดูเลต VSBSC
แบนด์วิดท์มากกว่าเมื่อเทียบกับคลื่น SSBSC
Demodulation มีความซับซ้อน
การใช้งาน
การประยุกต์ใช้ VSBSC ที่โดดเด่นที่สุดและเป็นมาตรฐานสำหรับการส่งสัญญาณโทรทัศน์ นอกจากนี้นี่เป็นเทคนิคที่สะดวกและมีประสิทธิภาพที่สุดเมื่อพิจารณาการใช้แบนด์วิดท์
ตอนนี้ให้เราพูดคุยเกี่ยวกับโมดูเลเตอร์ที่สร้างคลื่น VSBSC และตัวดีโมดูเลเตอร์ซึ่งสาธิตคลื่น VSBSC ทีละตัว
การสร้าง VSBSC
การสร้างคลื่น VSBSC คล้ายกับการสร้างคลื่น SSBSC โมดูเลเตอร์ VSBSC แสดงในรูปต่อไปนี้
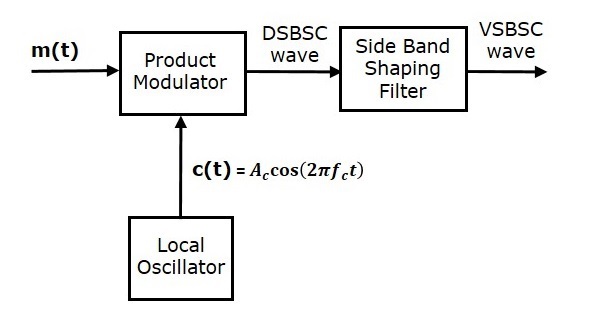
ในวิธีนี้อันดับแรกเราจะสร้างคลื่น DSBSC ด้วยความช่วยเหลือของโมดูเลเตอร์ผลิตภัณฑ์ จากนั้นใช้คลื่น DSBSC นี้เป็นอินพุตของตัวกรองการสร้างแถบด้านข้าง ตัวกรองนี้สร้างเอาต์พุตซึ่งเป็นคลื่น VSBSC
สัญญาณมอดูเลต $ m \ left (t \ right) $ และสัญญาณผู้ให้บริการ $ A_c \ cos \ left (2 \ pi f_ct \ right) $ ถูกนำไปใช้เป็นอินพุตไปยังโมดูเลเตอร์ของผลิตภัณฑ์ ดังนั้นโมดูเลเตอร์ผลิตภัณฑ์จึงสร้างเอาต์พุตซึ่งเป็นผลคูณของอินพุตทั้งสองนี้
ดังนั้นผลลัพธ์ของโมดูเลเตอร์ผลิตภัณฑ์คือ
$$ p \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) m \ left (t \ right) $$
ใช้การแปลงฟูเรียร์ทั้งสองด้าน
$$ P \ left (f \ right) = \ frac {A_c} {2} \ left [M \ left (f-f_c \ right) + M \ left (f + f_c \ right) \ right] $$
สมการข้างต้นแสดงถึงสมการของสเปกตรัมความถี่ DSBSC
ให้ฟังก์ชันการถ่ายโอนของตัวกรองการสร้างแถบด้านข้างเป็น $ H \ left (f \ right) $ ตัวกรองนี้มีอินพุต $ p \ left (t \ right) $ และเอาต์พุตคือ VSBSC modulated wave $ s \ left (t \ right) $ การแปลงฟูเรียร์ของ $ p \ left (t \ right) $ และ $ s \ left (t \ right) $ คือ $ P \ left (t \ right) $ และ $ S \ left (t \ right) $ ตามลำดับ
ในทางคณิตศาสตร์เราสามารถเขียน $ S \ left (f \ right) $ เป็น
$$ S \ left (t \ right) = P \ left (f \ right) H \ left (f \ right) $$
แทนค่า $ P \ left (f \ right) $ ในสมการด้านบน
$$ S \ left (f \ right) = \ frac {A_c} {2} \ left [M \ left (f-f_c \ right) + M \ left (f + f_c \ right) \ right] H \ left ( f \ right) $$
สมการข้างต้นแสดงถึงสมการของสเปกตรัมความถี่ VSBSC
Demodulation ของ VSBSC
Demodulation ของ VSBSC wave คล้ายกับ demodulation ของ SSBSC wave ที่นี่สัญญาณพาหะเดียวกัน (ซึ่งใช้สำหรับสร้างคลื่น VSBSC) ถูกใช้เพื่อตรวจจับสัญญาณข้อความ ดังนั้นกระบวนการตรวจจับนี้จึงเรียกว่าcoherent หรือ synchronous detection. VSBSC demodulator แสดงดังรูปต่อไปนี้

ในกระบวนการนี้สัญญาณข้อความสามารถดึงออกมาจากคลื่น VSBSC ได้โดยการคูณกับพาหะซึ่งมีความถี่เดียวกันและเฟสของพาหะที่ใช้ในการมอดูเลต VSBSC จากนั้นสัญญาณที่ได้จะถูกส่งผ่าน Low Pass Filter เอาต์พุตของตัวกรองนี้คือสัญญาณข้อความที่ต้องการ
ให้คลื่น VSBSC เป็น $ s \ left (t \ right) $ และสัญญาณพาหะคือ $ A_c \ cos \ left (2 \ pi f_ct \ right) $
จากรูปเราสามารถเขียนผลลัพธ์ของโมดูเลเตอร์ผลิตภัณฑ์เป็น
$$ v \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) s \ left (t \ right) $$
ใช้การแปลงฟูเรียร์ทั้งสองด้าน
$$ V \ left (f \ right) = \ frac {A_c} {2} \ left [S \ left (f-f_c \ right) + S \ left (f + f_c \ right) \ right] $$
เรารู้ว่า$ S \ left (f \ right) = \ frac {A_c} {2} \ left [M \ left (f-f_c \ right) + M \ left (f + f_c \ right) \ right] H \ ซ้าย (f \ right) $
จากสมการด้านบนให้เราหา $ S \ left (f-f_c \ right) $ และ $ S \ left (f + f_c \ right) $
$$ S \ left (f-f_c \ right) = \ frac {A_c} {2} \ left [M \ left (f-f_c-f_c \ right) + M \ left (f-f_c + f_c \ right) \ ขวา] H \ left (f-f_c \ right) $$
$ \ Rightarrow S \ left (f-f_c \ right) = \ frac {A_c} {2} \ left [M \ left (f-2f_c \ right) + M \ left (f \ right) \ right] H \ left (f-f_c \ right) $
$$ S \ left (f + f_c \ right) = \ frac {A_c} {2} \ left [M \ left (f + f_c-f_c \ right) + M \ left (f + f_c + f_c \ right) \ ขวา] H \ left (f + f_c \ right) $$
$ \ Rightarrow S \ left (f + f_c \ right) = \ frac {A_c} {2} \ left [M \ left (f \ right) + M \ left (f + 2f_c \ right) \ right] H \ left (f + f_c \ right) $
แทนที่ $ S \ left (f-f_c \ right) $ และ $ S \ left (f + f_c \ right) $ ค่าใน $ V \ left (f \ right) $
$ V (f) = \ frac {A_c} {2} [\ frac {A_c} {2} [M (f-2f_c) + M (f)] H (f-f_c) + $
$ \ frac {A_c} {2} [M (f) + M (f + 2f_c)] H (f + f_c)] $
$ \ Rightarrow V \ left (f \ right) = \ frac {{A_ {c}} ^ {2}} {4} M \ left (f \ right) \ left [H \ left (f-f_c \ right) + H \ left (f + f_c \ right) \ right] $
$ + \ frac {{A_ {c}} ^ {2}} {4} \ left [M \ left (f-2f_c \ right) H \ left (f-f_c \ right) + M \ left (f + 2f_c \ right) H \ left (f + f_c \ right) \ right] $
ในสมการข้างต้นคำแรกแสดงถึงเวอร์ชันที่ปรับขนาดของสเปกตรัมความถี่สัญญาณข้อความที่ต้องการ สามารถสกัดได้โดยส่งสัญญาณข้างต้นผ่านตัวกรองความถี่ต่ำ
$$ V_0 \ left (f \ right) = \ frac {{A_ {c}} ^ {2}} {4} M \ left (f \ right) \ left [H \ left (f-f_c \ right) + H \ left (f + f_c \ right) \ right] $$
การมอดูเลตประเภทอื่นในการมอดูเลตคลื่นต่อเนื่องคือ Angle Modulation. Angle Modulation คือกระบวนการที่ความถี่หรือเฟสของสัญญาณพาหะแปรผันตามสัญญาณข้อความ
สมการมาตรฐานของคลื่นมอดูเลตมุมคือ
$$ s \ left (t \ right) = A_c \ cos \ theta _i \ left (t \ right) $$
ที่ไหน
$ A_c $ คือแอมพลิจูดของคลื่นมอดูเลตซึ่งเหมือนกับแอมพลิจูดของสัญญาณพาหะ
$ \ theta _i \ left (t \ right) $ คือมุมของคลื่นมอดูเลต
การมอดูเลตมุมยังแบ่งออกเป็นการมอดูเลตความถี่และการมอดูเลตเฟส
Frequency Modulation คือกระบวนการเปลี่ยนความถี่ของสัญญาณพาหะแบบเชิงเส้นกับสัญญาณข้อความ
Phase Modulation คือกระบวนการเปลี่ยนเฟสของสัญญาณพาหะแบบเชิงเส้นกับสัญญาณข้อความ
ตอนนี้ให้เราคุยรายละเอียดเหล่านี้
การปรับความถี่
ในการมอดูเลตแอมพลิจูดความกว้างของสัญญาณพาหะจะแตกต่างกันไป ในขณะที่ในFrequency Modulation (FM)ความถี่ของสัญญาณพาหะแตกต่างกันไปตามแอมพลิจูดของสัญญาณมอดูเลตในทันที
ดังนั้นในการมอดูเลตความถี่แอมพลิจูดและเฟสของสัญญาณพาหะจะคงที่ สิ่งนี้สามารถเข้าใจได้ดีขึ้นโดยสังเกตจากตัวเลขต่อไปนี้
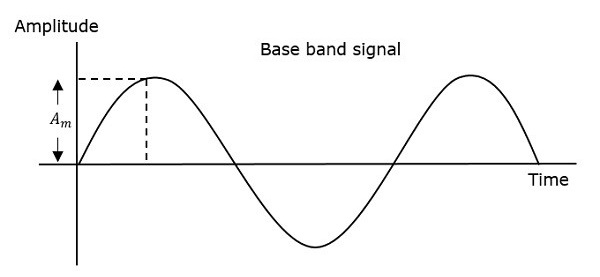


ความถี่ของคลื่นมอดูเลตจะเพิ่มขึ้นเมื่อความกว้างของสัญญาณมอดูเลตหรือข้อความเพิ่มขึ้น ในทำนองเดียวกันความถี่ของคลื่นมอดูเลตจะลดลงเมื่อแอมพลิจูดของสัญญาณมอดูเลตลดลง โปรดสังเกตว่าความถี่ของคลื่นมอดูเลตยังคงคงที่และเท่ากับความถี่ของสัญญาณพาหะเมื่อแอมพลิจูดของสัญญาณมอดูเลตเป็นศูนย์
การเป็นตัวแทนทางคณิตศาสตร์
สมการสำหรับความถี่ทันที $ f_i $ ในการมอดูเลต FM คือ
$$ f_i = f_c + k_fm \ left (t \ right) $$
ที่ไหน
$ f_c $ คือความถี่ของผู้ให้บริการ
$ k_t $ คือความไวของความถี่
$ m \ left (t \ right) $ คือสัญญาณข้อความ
เรารู้ความสัมพันธ์ระหว่างความถี่เชิงมุม $ \ omega_i $ และมุม $ \ theta _i \ left (t \ right) $ as
$$ \ omega_i = \ frac {d \ theta _i \ left (t \ right)} {dt} $$
$ \ Rightarrow 2 \ pi f_i = \ frac {d \ theta _i \ left (t \ right)} {dt} $
$ \ Rightarrow \ theta _i \ left (t \ right) = 2 \ pi \ int f_i dt $
แทนค่า $ f_i $ ในสมการด้านบน
$$ \ theta _i \ left (t \ right) = 2 \ pi \ int \ left (f_c + k_f m \ left (t \ right) \ right) dt $$
$ \ Rightarrow \ theta _i \ left (t \ right) = 2 \ pi f_ct + 2 \ pi k_f \ int m \ left (t \ right) dt $
แทนค่า $ \ theta _i \ left (t \ right) $ ในสมการมาตรฐานของคลื่นมอดูเลตมุม
$$ s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct + 2 \ pi k_f \ int m \ left (t \ right) dt \ right) $$
นี้เป็น equation of FM wave.
ถ้าสัญญาณมอดูเลตคือ $ m \ left (t \ right) = A_m \ cos \ left (2 \ pi f_mt \ right) $ ดังนั้นสมการของคลื่น FM จะเป็น
$$ s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct + \ beta \ sin \ left (2 \ pi f_mt \ right) \ right) $$
ที่ไหน
$ \ beta $ = modulation index $ = \ frac {\ Delta f} {f_m} = \ frac {k_fA_m} {f_m} $
ความแตกต่างระหว่างความถี่มอดูเลต FM (ความถี่ทันที) และความถี่ของผู้ให้บริการปกติเรียกว่าเป็น Frequency Deviation. แสดงโดย $ \ Delta f $ ซึ่งเท่ากับผลคูณของ $ k_f $ และ $ A_m $
FM สามารถแบ่งออกเป็น Narrowband FM และ Wideband FM ตามค่าของดัชนีการมอดูเลต $ \ beta $
Narrowband FM
ต่อไปนี้เป็นคุณสมบัติของ Narrowband FM
การมอดูเลตความถี่นี้มีแบนด์วิดท์ขนาดเล็กเมื่อเทียบกับคลื่นความถี่กว้าง FM
ดัชนีการมอดูเลต $ \ beta $ มีขนาดเล็กกล่าวคือน้อยกว่า 1
สเปกตรัมประกอบด้วยพาหะแถบด้านข้างด้านบนและแถบด้านข้างด้านล่าง
ใช้ในการสื่อสารเคลื่อนที่เช่นระบบไร้สายของตำรวจรถพยาบาลรถแท็กซี่เป็นต้น
Wideband FM
ต่อไปนี้เป็นคุณสมบัติของ Wideband FM
การมอดูเลตความถี่นี้มีแบนด์วิดท์ไม่สิ้นสุด
ดัชนีการมอดูเลต $ \ beta $ มีขนาดใหญ่กล่าวคือสูงกว่า 1
สเปกตรัมของมันประกอบด้วยพาหะและไซด์แบนด์จำนวนไม่ จำกัด ซึ่งตั้งอยู่รอบ ๆ
ใช้ในงานด้านความบันเทิงการแพร่ภาพเช่นวิทยุ FM โทรทัศน์เป็นต้น
การปรับเฟส
ในการมอดูเลตความถี่ความถี่ของพาหะแตกต่างกันไป ในขณะที่ในPhase Modulation (PM)เฟสของสัญญาณพาหะจะแตกต่างกันไปตามแอมพลิจูดของสัญญาณมอดูเลตในทันที
ดังนั้นในการมอดูเลตเฟสแอมพลิจูดและความถี่ของสัญญาณพาหะจะคงที่ สิ่งนี้สามารถเข้าใจได้ดีขึ้นโดยสังเกตจากตัวเลขต่อไปนี้
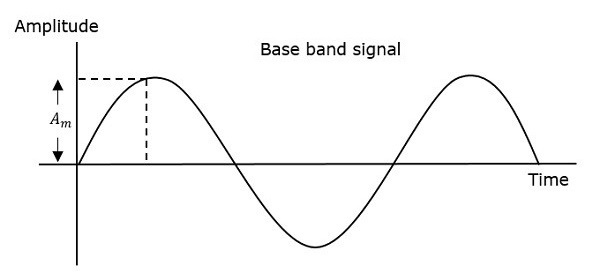

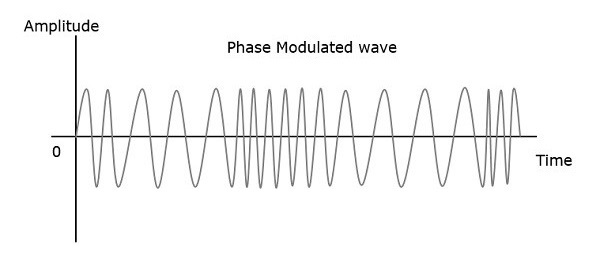
เฟสของคลื่นมอดูเลตมีจุดไม่สิ้นสุดซึ่งการเปลี่ยนเฟสในคลื่นสามารถเกิดขึ้นได้ แอมพลิจูดทันทีของสัญญาณมอดูเลตจะเปลี่ยนเฟสของสัญญาณพาหะ เมื่อแอมพลิจูดเป็นบวกเฟสจะเปลี่ยนไปในทิศทางเดียวและหากแอมพลิจูดเป็นลบเฟสจะเปลี่ยนไปในทิศทางตรงกันข้าม
การเป็นตัวแทนทางคณิตศาสตร์
สมการของเฟสทันที $ \ phi_i $ ในการมอดูเลตเฟสคือ
$$ \ phi _i = k_p m \ left (t \ right) $$
ที่ไหน
$ k_p $ คือความไวของเฟส
$ m \ left (t \ right) $ คือสัญญาณข้อความ
สมการมาตรฐานของคลื่นมอดูเลตมุมคือ
$$ s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct + \ phi_i \ right) $$
แทนค่า $ \ phi_i $ ในสมการด้านบน
$$ s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct + k_p m \ left (t \ right) \ right) $$
นี้เป็น equation of PM wave.
ถ้าสัญญาณมอดูเลต $ m \ left (t \ right) = A_m \ cos \ left (2 \ pi f_mt \ right) $ ดังนั้นสมการของคลื่น PM จะเป็น
$$ s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct + \ beta \ cos \ left (2 \ pi f_mt \ right) \ right) $$
ที่ไหน
$ \ beta $ = modulation index = $ \ Delta \ phi = k_pA_m $
$ \ Delta \ phi $ คือการเบี่ยงเบนเฟส
การมอดูเลตเฟสใช้ในระบบสื่อสารเคลื่อนที่ในขณะที่การมอดูเลตความถี่ส่วนใหญ่ใช้สำหรับการแพร่ภาพ FM
ในบทที่แล้วเราได้กล่าวถึงพารามิเตอร์ที่ใช้ในการมอดูเลตมุม พารามิเตอร์แต่ละตัวมีสูตรของตัวเอง โดยใช้สูตรเหล่านั้นเราสามารถค้นหาค่าพารามิเตอร์ที่เกี่ยวข้องได้ ในบทนี้ให้เราแก้ปัญหาเล็กน้อยตามแนวคิดของการมอดูเลตความถี่
ปัญหา 1
รูปคลื่นไซน์มอดูเลตที่มีแอมพลิจูด 5 V และความถี่ 2 KHz ถูกนำไปใช้กับเครื่องกำเนิด FM ซึ่งมีความไวความถี่ 40 เฮิรตซ์ / โวลต์ คำนวณค่าเบี่ยงเบนความถี่ดัชนีการมอดูเลตและแบนด์วิดท์
วิธีการแก้
กำหนดความกว้างของสัญญาณมอดูเลต $ A_m = 5V $
ความถี่ของสัญญาณมอดูเลต $ f_m = 2 KHz $
ความไวความถี่ $ k_f = 40 Hz / volt $
เรารู้สูตรสำหรับการเบี่ยงเบนความถี่เป็น
$$ \ Delta f = k_f A_m $$
แทนค่า $ k_f $ และ $ A_m $ ในสูตรข้างต้น
$$ \ Delta f = 40 \ คูณ 5 = 200Hz $$
ดังนั้น, frequency deviation, $ \ Delta f $ คือ $ 200Hz $
สูตรสำหรับดัชนีการมอดูเลตคือ
$$ \ beta = \ frac {\ Delta f} {f_m} $$
แทนค่า $ \ Delta f $ และ $ f_m $ ในสูตรข้างต้น
$$ \ beta = \ frac {200} {2 \ times 1000} = 0.1 $$
ที่นี่ค่าของ modulation index$ \ beta $ เท่ากับ 0.1 ซึ่งน้อยกว่าหนึ่ง ดังนั้นจึงเป็น FM แบบวงแคบ
สูตรสำหรับ Bandwidth ของ Narrow Band FM จะเหมือนกับคลื่น AM
$$ BW = 2f_m $$
แทนค่า $ f_m $ ในสูตรข้างต้น
$$ BW = 2 \ คูณ 2K = 4KHz $$
ดังนั้นไฟล์ bandwidth ของคลื่น Narrow Band FM คือ $ 4 KHz $
ปัญหา 2
คลื่น FM ให้โดย $ s \ left (t \ right) = 20 \ cos \ left (8 \ pi \ times10 ^ 6t + 9 \ sin \ left (2 \ pi \ times 10 ^ 3 t \ right) \ right ) $. คำนวณค่าเบี่ยงเบนความถี่แบนด์วิดท์และพลังของคลื่น FM
วิธีการแก้
กำหนดให้สมการของคลื่น FM เป็น
$$ s \ left (t \ right) = 20 \ cos \ left (8 \ pi \ times10 ^ 6t + 9 \ sin \ left (2 \ pi \ times 10 ^ 3 t \ right) \ right) $$
เรารู้สมการมาตรฐานของคลื่น FM เป็น
$$ s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct + \ beta \ sin \ left (2 \ pi f_mt \ right) \ right) $$
เราจะได้ค่าต่อไปนี้โดยการเปรียบเทียบสองสมการข้างต้น
ความกว้างของสัญญาณผู้ให้บริการ $ A_c = 20V $
ความถี่ของสัญญาณผู้ให้บริการ $ f_c = 4 \ times 10 ^ 6 Hz = 4 MHz $
ความถี่ของสัญญาณข้อความ $ f_m = 1 \ times 10 ^ 3 Hz = 1KHz $
ดัชนีการมอดูเลต $ \ beta = 9 $
ที่นี่ค่าของดัชนีการมอดูเลตมีค่ามากกว่าหนึ่ง ดังนั้นจึงเป็นWide Band FM.
เรารู้สูตรสำหรับดัชนีการมอดูเลตเป็น
$$ \ beta = \ frac {\ Delta f} {f_m} $$
จัดเรียงสมการข้างต้นใหม่ดังนี้
$$ \ Delta = \ beta f_m $$
แทนค่า $ \ beta $ และ $ f_m $ ในสมการด้านบน
$$ \ Delta = 9 \ คูณ 1K = 9 KHz $$
ดังนั้น, frequency deviation, $ \ Delta f $ คือ $ 9 KHz $
สูตรสำหรับ Bandwidth ของคลื่น Wide Band FM คือ
$$ BW = 2 \ left (\ beta +1 \ right) f_m $$
แทนค่า $ \ beta $ และ $ f_m $ ในสูตรข้างต้น
$$ BW = 2 \ left (9 +1 \ right) 1K = 20KHz $$
ดังนั้นไฟล์ bandwidth ของคลื่น Wide Band FM คือ $ 20 KHz $
สูตรพลังของคลื่น FM คือ
$$ P_c = \ frac {{A_ {c}} ^ {2}} {2R} $$
สมมติ $ R = 1 \ Omega $ และแทนค่า $ A_c $ ในสมการด้านบน
$$ P = \ frac {\ left (20 \ right) ^ 2} {2 \ left (1 \ right)} = 200W $$
ดังนั้นไฟล์ power ของคลื่น FM คือ $ 200 $ watts.
ในบทนี้ให้เราพูดคุยเกี่ยวกับโมดูเลเตอร์ที่สร้างคลื่น NBFM และ WBFM ก่อนอื่นให้เราพูดคุยเกี่ยวกับการสร้าง NBFM
การสร้าง NBFM
เรารู้ว่าสมการมาตรฐานของคลื่น FM คือ
$$ s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct + 2 \ pi k_f \ int m \ left (t \ right) dt \ right) $$
$ \ Rightarrow s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) \ cos \ left (2 \ pi k_f \ int m \ left (t \ right) dt \ right) - $
$ A_c \ sin \ left (2 \ pi f_ct \ right) \ sin \ left (2 \ pi k_f \ int m \ left (t \ right) dt \ right) $
สำหรับ NBFM
$$ \ left | 2 \ pi k_f \ int m \ left (t \ right) dt \ right | <<1 $$
เรารู้ว่า $ \ cos \ theta \ ประมาณ 1 $ และ $ \ sin \ theta \ ประมาณ 1 $ เมื่อ $ \ theta $ มีขนาดเล็กมาก
โดยใช้ความสัมพันธ์ข้างต้นเราจะได้รับ NBFM equation เช่น
$$ s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) -A_c \ sin \ left (2 \ pi f_ct \ right) 2 \ pi k_f \ int m \ left (t \ ขวา) dt $$
แผนภาพบล็อกของโมดูเลเตอร์ NBFM แสดงดังรูปต่อไปนี้
ที่นี่ตัวรวมใช้เพื่อรวมสัญญาณมอดูเลต $ m \ left (t \ right) $ สัญญาณพาหะ $ A_c \ cos \ left (2 \ pi f_ct \ right) $ คือเฟสที่เลื่อนโดย $ -90 ^ 0 $ เพื่อรับ $ A_c \ sin \ left (2 \ pi f_ct \ right) $ ด้วยความช่วยเหลือของ $ -90 ^ 0 $ ตัวเปลี่ยนเฟส โมดูเลเตอร์ผลิตภัณฑ์มีสองอินพุต $ \ int m \ left (t \ right) dt $ และ $ A_c \ sin \ left (2 \ pi f_ct \ right) $ สร้างเอาต์พุตซึ่งเป็นผลคูณของอินพุตทั้งสองนี้
นี่จะคูณด้วย $ 2 \ pi k_f $ โดยวางบล็อก $ 2 \ pi k_f $ ในเส้นทางเดินหน้า บล็อกฤดูร้อนมีสองอินพุตซึ่งไม่มีอะไรนอกจากสมการ NBFM สองคำ สัญญาณบวกและลบถูกกำหนดให้สำหรับสัญญาณพาหะและคำอื่น ๆ ที่อินพุตของบล็อกฤดูร้อน ในที่สุดบล็อกฤดูร้อนก็ผลิตคลื่น NBFM
การสร้าง WBFM
สองวิธีต่อไปนี้สร้างคลื่น WBFM
- วิธีการโดยตรง
- วิธีทางอ้อม
วิธีการโดยตรง
วิธีนี้เรียกว่า Direct Method เนื่องจากเราสร้างคลื่น FM แบบวงกว้างโดยตรง ในวิธีนี้ Voltage Controlled Oscillator (VCO) ถูกใช้เพื่อสร้าง WBFM VCO สร้างสัญญาณเอาต์พุตซึ่งมีความถี่เป็นสัดส่วนกับแรงดันสัญญาณอินพุต ซึ่งคล้ายกับคำจำกัดความของคลื่น FM แผนภาพบล็อกของการสร้างคลื่น WBFM แสดงดังรูปต่อไปนี้

ที่นี่สัญญาณมอดูเลต $ m \ left (t \ right) $ ถูกนำไปใช้เป็นอินพุตของ Voltage Controlled Oscillator (VCO) VCO สร้างเอาต์พุตซึ่งไม่มีอะไรนอกจาก WBFM
$$ f_i \: \ alpha \: m \ left (t \ right) $$
$$ \ Rightarrow f_i = f_c + k_fm \ left (t \ right) $$
ที่ไหน
$ f_i $ คือความถี่ทันทีของคลื่น WBFM
วิธีทางอ้อม
วิธีนี้เรียกว่า Indirect Method เนื่องจากเรากำลังสร้างคลื่น FM แบบวงกว้างโดยอ้อม ซึ่งหมายความว่าอันดับแรกเราจะสร้างคลื่น NBFM จากนั้นด้วยความช่วยเหลือของตัวคูณความถี่เราจะได้คลื่น WBFM แผนภาพบล็อกของการสร้างคลื่น WBFM แสดงดังรูปต่อไปนี้

แผนภาพบล็อกนี้ประกอบด้วยสองขั้นตอนส่วนใหญ่ ในขั้นแรกคลื่น NBFM จะถูกสร้างขึ้นโดยใช้โมดูเลเตอร์ NBFM เราได้เห็นแผนภาพบล็อกของโมดูเลเตอร์ NBFM ในตอนต้นของบทนี้ เรารู้ว่าดัชนีการมอดูเลตของคลื่น NBFM มีค่าน้อยกว่าหนึ่ง ดังนั้นเพื่อให้ได้ดัชนีการมอดูเลตที่ต้องการ (มากกว่าหนึ่ง) ของคลื่น FM ให้เลือกค่าตัวคูณความถี่ให้เหมาะสม
Frequency multiplierเป็นอุปกรณ์ที่ไม่ใช่เชิงเส้นซึ่งสร้างสัญญาณเอาต์พุตที่มีความถี่ 'n' คูณความถี่สัญญาณอินพุต โดยที่ 'n' คือปัจจัยการคูณ
หากคลื่น NBFM ที่มีดัชนีการมอดูเลต $ \ beta $ น้อยกว่า 1 ถูกนำไปใช้เป็นอินพุตของตัวคูณความถี่ตัวคูณความถี่จะสร้างสัญญาณเอาต์พุตซึ่งดัชนีการมอดูเลตคือ 'n' คูณ $ \ beta $ และความถี่ยัง 'n 'คูณความถี่ของคลื่น WBFM
บางครั้งเราอาจต้องใช้ตัวคูณความถี่และเครื่องผสมหลายขั้นตอนเพื่อเพิ่มค่าเบี่ยงเบนความถี่และดัชนีการมอดูเลตของคลื่น FM
ในบทนี้ให้เราพูดคุยเกี่ยวกับ demodulators ที่ demodulate คลื่น FM สองวิธีต่อไปนี้ demodulate คลื่น FM
- วิธีการแยกแยะความถี่
- วิธีการแยกแยะเฟส
วิธีการแยกแยะความถี่
เรารู้ว่าสมการของคลื่น FM คือ
$$ s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct + 2 \ pi k_f \ int m \ left (t \ right) dt \ right) $$
แยกความแตกต่างของสมการข้างต้นด้วยความเคารพ 't'.
$$ \ frac {ds \ left (t \ right)} {dt} = -A_c \ left (2 \ pi f_c + 2 \ pi k_fm \ left (t \ right) \ right) \ sin \ left (2 \ pi f_ct + 2 \ pi k_f \ int m \ left (t \ right) dt \ right) $$
เราสามารถเขียน $ - \ sin \ theta $ เป็น $ \ sin \ left (\ theta -180 ^ 0 \ right) $
$$ \ Rightarrow \ frac {ds (t)} {dt} = A_c \ left (2 \ pi f_c + 2 \ pi k_fm \ left (t \ right) \ right) \ sin \ left (2 \ pi f_ct + 2 \ pi k_f \ int m \ left (t \ right) dt-180 ^ 0 \ right) $$
$$ \ Rightarrow \ frac {ds (t)} {dt} = A_c \ left (2 \ pi f_c \ right) \ left [1+ \ left (\ frac {k_f} {k_c} \ right) m \ left ( t \ right) \ right] \ sin \ left (2 \ pi f_ct + 2 \ pi k_f \ int m \ left (t \ right) dt-180 ^ 0 \ right) $$
ในสมการข้างต้นคำว่าแอมพลิจูดมีลักษณะคล้ายกับซองจดหมายของคลื่น AM และระยะของมุมจะคล้ายกับมุมของคลื่น FM ที่นี่ข้อกำหนดของเราคือสัญญาณมอดูเลต $ m \ left (t \ right) $ ดังนั้นเราสามารถกู้คืนได้จากซองจดหมายของคลื่น AM
รูปต่อไปนี้แสดงแผนภาพบล็อกของ FM demodulator โดยใช้วิธีการแยกแยะความถี่

แผนภาพบล็อกนี้ประกอบด้วยตัวแยกความแตกต่างและตัวตรวจจับซองจดหมาย Differentiator ใช้ในการแปลงคลื่น FM เป็นการรวมกันของคลื่น AM และคลื่น FM ซึ่งหมายความว่าจะแปลงรูปแบบความถี่ของคลื่น FM เป็นรูปแบบแรงดันไฟฟ้า (แอมพลิจูด) ที่สอดคล้องกันของคลื่น AM เราทราบการทำงานของเครื่องตรวจจับซองจดหมาย สร้างเอาต์พุต demodulated ของคลื่น AM ซึ่งไม่มีอะไรนอกจากสัญญาณมอดูเลต
วิธีการแยกแยะเฟส
รูปต่อไปนี้แสดงแผนภาพบล็อกของ FM demodulator โดยใช้วิธีการแยกแยะเฟส

แผนภาพบล็อกนี้ประกอบด้วยตัวคูณตัวกรองความถี่ต่ำและ Oscillator ควบคุมแรงดันไฟฟ้า (VCO) VCO สร้างสัญญาณเอาต์พุต $ v \ left (t \ right) $ ซึ่งความถี่เป็นสัดส่วนกับแรงดันสัญญาณอินพุต $ d \ left (t \ right) $ ในขั้นต้นเมื่อสัญญาณ $ d \ left (t \ right) $ เป็นศูนย์ให้ปรับ VCO เพื่อสร้างสัญญาณเอาต์พุต $ v \ left (t \ right) $ โดยมีความถี่พาหะและ $ -90 ^ 0 $ เปลี่ยนเฟส เกี่ยวกับสัญญาณของผู้ให้บริการ
คลื่น FM $ s \ left (t \ right) $ และเอาต์พุต VCO $ v \ left (t \ right) $ ถูกนำไปใช้เป็นอินพุตของตัวคูณ ตัวคูณสร้างเอาต์พุตโดยมีส่วนประกอบความถี่สูงและส่วนประกอบความถี่ต่ำ ตัวกรองความถี่ต่ำจะกำจัดส่วนประกอบความถี่สูงและสร้างเฉพาะส่วนประกอบความถี่ต่ำเป็นเอาต์พุต
ส่วนประกอบความถี่ต่ำนี้มีเฉพาะความแตกต่างของเฟสที่เกี่ยวข้องกับคำเท่านั้น ดังนั้นเราจึงได้รับสัญญาณมอดูเลต $ m \ left (t \ right) $ จากเอาต์พุตนี้ของตัวกรองความถี่ต่ำ
Multiplexingเป็นกระบวนการรวมสัญญาณหลายสัญญาณเป็นสัญญาณเดียวผ่านสื่อที่ใช้ร่วมกัน หากสัญญาณอะนาล็อกเป็นมัลติเพล็กซ์จะเรียกว่าเป็นanalog multiplexing. ในทำนองเดียวกันถ้าสัญญาณดิจิทัลเป็นมัลติเพล็กซ์ก็จะเรียกว่าเป็นdigital multiplexing.
การมัลติเพล็กซ์ได้รับการพัฒนาขึ้นครั้งแรกในระบบโทรศัพท์ สัญญาณจำนวนหนึ่งถูกรวมเข้าด้วยกันเพื่อส่งผ่านสายเคเบิลเส้นเดียว กระบวนการมัลติเพล็กซ์แบ่งช่องทางการสื่อสารออกเป็นช่องทางตรรกะหลายช่องโดยแบ่งช่องสัญญาณแต่ละช่องสำหรับสัญญาณข้อความหรือสตรีมข้อมูลที่จะถ่ายโอน อุปกรณ์ที่ทำมัลติเพล็กซ์สามารถเรียกได้ว่าเป็นMultiplexer หรือ MUX.
กระบวนการย้อนกลับคือการแยกจำนวนช่องสัญญาณออกจากช่องหนึ่งซึ่งทำที่เครื่องรับเรียกว่าเป็น de-multiplexing. อุปกรณ์ที่ทำ de-multiplexing สามารถเรียกได้ว่าเป็นde-multiplexer หรือ DEMUX.
ตัวเลขต่อไปนี้แสดงให้เห็นถึงแนวคิดของ MUX และ DEMUX การใช้งานหลักอยู่ในด้านการสื่อสาร

ประเภทของ Multiplexers
มัลติเพล็กเซอร์ส่วนใหญ่มีสองประเภท ได้แก่ อนาล็อกและดิจิตอล แบ่งออกเป็น Frequency Division Multiplexing (FDM), Wavelength Division Multiplexing (WDM) และ Time Division Multiplexing (TDM) รูปต่อไปนี้ให้แนวคิดโดยละเอียดเกี่ยวกับการจำแนกประเภทนี้
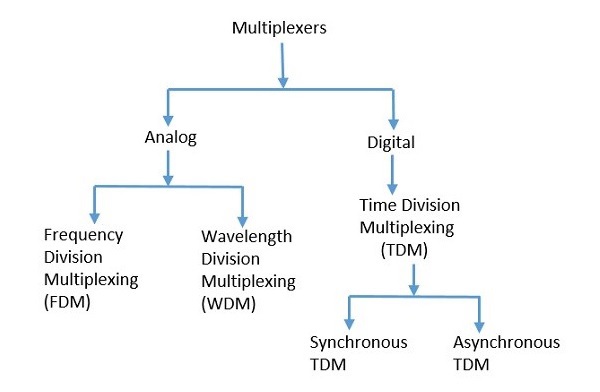
เทคนิคการมัลติเพล็กซ์มีหลายประเภท ซึ่งเรามีประเภทหลักที่มีการจำแนกประเภททั่วไปดังที่กล่าวไว้ในรูปด้านบน ให้เราดูทีละรายการ
มัลติเพล็กซ์แบบอนาล็อก
สัญญาณที่ใช้ในเทคนิคการมัลติเพล็กซ์แบบอะนาล็อกมีลักษณะเป็นอนาล็อก สัญญาณแอนะล็อกถูกมัลติเพล็กซ์ตามความถี่ (FDM) หรือความยาวคลื่น (WDM)
Multiplexing กองความถี่
ในการมัลติเพล็กซ์แบบอะนาล็อกเทคนิคที่ใช้มากที่สุดคือ Frequency Division Multiplexing (FDM) เทคนิคนี้ใช้ความถี่ต่างๆเพื่อรวมสตรีมข้อมูลเพื่อส่งไปยังสื่อการสื่อสารเป็นสัญญาณเดียว
Example - เครื่องส่งโทรทัศน์แบบดั้งเดิมซึ่งส่งจำนวนช่องสัญญาณผ่านสายเคเบิลเส้นเดียวใช้ FDM
การมัลติเพล็กซ์หารความยาวคลื่น
การมัลติเพล็กซ์หารความยาวคลื่น (WDM) เป็นเทคนิคอะนาล็อกซึ่งกระแสข้อมูลจำนวนมากที่มีความยาวคลื่นต่างกันจะถูกส่งไปในสเปกตรัมของแสง ถ้าความยาวคลื่นเพิ่มขึ้นความถี่ของสัญญาณจะลดลง ปริซึมซึ่งสามารถเปลี่ยนความยาวคลื่นที่แตกต่างกันให้เป็นเส้นเดียวสามารถใช้ที่เอาต์พุตของ MUX และอินพุตของ DEMUX
Example - การสื่อสารด้วยใยแก้วนำแสงใช้เทคนิค WDM เพื่อรวมความยาวคลื่นต่างๆให้เป็นแสงเดียวสำหรับการสื่อสาร
Digital Multiplexing
คำว่าดิจิทัลหมายถึงบิตของข้อมูลที่ไม่ต่อเนื่อง ดังนั้นข้อมูลที่มีอยู่จึงอยู่ในรูปแบบของเฟรมหรือแพ็กเก็ตซึ่งไม่ต่อเนื่อง
Multiplexing การแบ่งเวลา
ใน Time Division Multiplexing (TDM) กรอบเวลาจะแบ่งออกเป็นช่อง เทคนิคนี้ใช้ในการส่งสัญญาณผ่านช่องทางการสื่อสารเดียวโดยการจัดสรรหนึ่งช่องสำหรับแต่ละข้อความ
Time Division Multiplexing (TDM) สามารถแบ่งประเภทเป็น Synchronous TDM และ Asynchronous TDM
TDM แบบซิงโครนัส
ใน Synchronous TDM อินพุตจะเชื่อมต่อกับเฟรม หากมีจำนวนการเชื่อมต่อ 'n' เฟรมจะถูกแบ่งออกเป็นช่วงเวลา 'n' มีการจัดสรรสล็อตหนึ่งช่องสำหรับแต่ละสายอินพุต
ในเทคนิคนี้อัตราการสุ่มตัวอย่างเป็นเรื่องปกติสำหรับสัญญาณทั้งหมดดังนั้นจึงได้รับอินพุตนาฬิกาเดียวกัน MUX จัดสรรsame slot ไปยังอุปกรณ์แต่ละเครื่องตลอดเวลา
TDM แบบอะซิงโครนัส
ใน Asynchronous TDM อัตราการสุ่มตัวอย่างจะแตกต่างกันสำหรับแต่ละสัญญาณและไม่จำเป็นต้องใช้นาฬิกาทั่วไป หากอุปกรณ์ที่กำหนดไว้สำหรับช่วงเวลาไม่ส่งข้อมูลใด ๆ และไม่ได้ใช้งานช่องนั้นอาจเป็นได้allotted to another อุปกรณ์ซึ่งแตกต่างจากซิงโครนัส
TDM ประเภทนี้ใช้ในเครือข่ายโหมดถ่ายโอนแบบอะซิงโครนัส
De-Multiplexer
De-multiplexers ใช้เพื่อเชื่อมต่อแหล่งเดียวกับหลายปลายทาง กระบวนการนี้เป็นกระบวนการย้อนกลับของการมัลติเพล็กซ์ ตามที่กล่าวไว้ก่อนหน้านี้ส่วนใหญ่จะใช้ที่เครื่องรับ DEMUX มีแอพพลิเคชั่นมากมาย ใช้ในเครื่องรับในระบบสื่อสาร ใช้ในหน่วยเลขคณิตและตรรกะในคอมพิวเตอร์เพื่อจ่ายพลังงานและส่งต่อการสื่อสาร ฯลฯ
De-multiplexers ใช้เป็นตัวแปลงอนุกรมถึงขนาน ข้อมูลอนุกรมจะได้รับเป็นอินพุตไปยัง DEMUX ในช่วงเวลาปกติและตัวนับจะติดอยู่เพื่อควบคุมเอาต์พุตของเดมัลติเพล็กเซอร์
ทั้งมัลติเพล็กเซอร์และเดมัลติเพล็กเซอร์มีบทบาทสำคัญในระบบการสื่อสารทั้งที่เครื่องส่งและส่วนรับ
ในระบบการสื่อสารใด ๆ ในระหว่างการส่งสัญญาณหรือในขณะที่รับสัญญาณสัญญาณที่ไม่ต้องการบางอย่างจะถูกนำเข้าสู่การสื่อสารทำให้ไม่พึงประสงค์สำหรับผู้รับและตั้งคำถามถึงคุณภาพของการสื่อสาร ความวุ่นวายดังกล่าวเรียกว่าNoise.
Noise คืออะไร?
เสียงรบกวนคือ unwanted signalซึ่งรบกวนสัญญาณข้อความต้นฉบับและทำให้พารามิเตอร์ของสัญญาณข้อความเสียหาย การเปลี่ยนแปลงในกระบวนการสื่อสารนี้นำไปสู่การเปลี่ยนแปลงข้อความ ส่วนใหญ่จะเข้าที่ช่องหรือเครื่องรับ
สัญญาณรบกวนสามารถเข้าใจได้โดยดูที่รูปต่อไปนี้

ดังนั้นจึงเข้าใจว่าสัญญาณรบกวนคือสัญญาณบางอย่างที่ไม่มีรูปแบบและไม่มีความถี่หรือแอมพลิจูดคงที่ มันค่อนข้างสุ่มและคาดเดาไม่ได้ มักใช้มาตรการเพื่อลดแม้ว่าจะไม่สามารถกำจัดได้ทั้งหมด
ตัวอย่างเสียงรบกวนที่พบบ่อย ได้แก่ -
เสียงฟู่ในเครื่องรับวิทยุ
เสียงพึมพำท่ามกลางการสนทนาทางโทรศัพท์
การสั่นไหวในเครื่องรับโทรทัศน์ ฯลฯ
ประเภทของเสียงรบกวน
การจำแนกประเภทของสัญญาณรบกวนนั้นขึ้นอยู่กับประเภทของแหล่งสัญญาณเอฟเฟกต์ที่แสดงหรือความสัมพันธ์ที่มีกับเครื่องรับเป็นต้น
มีสองวิธีหลักในการสร้างเสียงรบกวน หนึ่งคือผ่านบางexternal source ในขณะที่อีกอันสร้างโดยไฟล์ internal sourceภายในส่วนเครื่องรับ
แหล่งภายนอก
เสียงรบกวนนี้เกิดจากแหล่งภายนอกซึ่งมักเกิดขึ้นในสื่อหรือช่องทางการสื่อสาร เสียงรบกวนนี้ไม่สามารถกำจัดได้ทั้งหมด วิธีที่ดีที่สุดคือการหลีกเลี่ยงไม่ให้เสียงรบกวนสัญญาณ
ตัวอย่าง
ตัวอย่างที่พบบ่อยที่สุดของเสียงประเภทนี้คือ
เสียงรบกวนในบรรยากาศ (เนื่องจากความผิดปกติในบรรยากาศ)
เสียงรบกวนภายนอกเช่นเสียงจากแสงอาทิตย์และเสียงรบกวนจากจักรวาล
เสียงอุตสาหกรรม
แหล่งที่มาภายใน
สัญญาณรบกวนนี้เกิดจากส่วนประกอบของเครื่องรับขณะทำงาน ส่วนประกอบในวงจรเนื่องจากการทำงานอย่างต่อเนื่องอาจก่อให้เกิดเสียงรบกวนบางประเภท เสียงนี้สามารถวัดได้ การออกแบบตัวรับสัญญาณที่เหมาะสมอาจลดผลกระทบของเสียงรบกวนภายในนี้
Examples
ตัวอย่างที่พบบ่อยที่สุดของเสียงประเภทนี้คือ
เสียงรบกวนจากความร้อน (เสียงของจอห์นสันหรือเสียงไฟฟ้า)
เสียงรบกวน (เนื่องจากการเคลื่อนที่แบบสุ่มของอิเล็กตรอนและรู)
เสียงรบกวนเวลาขนส่ง (ระหว่างการเปลี่ยนแปลง)
เสียงรบกวนอื่น ๆ เป็นเสียงรบกวนอีกประเภทหนึ่งซึ่งรวมถึงการสั่นไหวเอฟเฟกต์ความต้านทานและเสียงรบกวนที่สร้างจากเครื่องผสมเป็นต้น
ผลกระทบของเสียง
เสียงรบกวนเป็นคุณสมบัติที่ไม่สะดวกซึ่งส่งผลต่อประสิทธิภาพของระบบ ต่อไปนี้เป็นผลกระทบของเสียง
เสียงรบกวน จำกัด ช่วงการทำงานของระบบ
สัญญาณรบกวนจะ จำกัด สัญญาณที่อ่อนที่สุดโดยทางอ้อมซึ่งแอมพลิฟายเออร์สามารถขยายได้ ออสซิลเลเตอร์ในวงจรมิกเซอร์อาจ จำกัด ความถี่เนื่องจากเสียงรบกวน การทำงานของระบบขึ้นอยู่กับการทำงานของวงจร สัญญาณรบกวน จำกัด สัญญาณที่เล็กที่สุดที่เครื่องรับสามารถประมวลผลได้
เสียงรบกวนมีผลต่อความไวของเครื่องรับ
ความไวคือจำนวนสัญญาณอินพุตขั้นต่ำที่จำเป็นเพื่อให้ได้เอาต์พุตคุณภาพที่ระบุ สัญญาณรบกวนมีผลต่อความไวของระบบรับซึ่งส่งผลต่อเอาต์พุตในที่สุด
ในบทนี้ให้เราคำนวณ Signal to Noise Ratios และ Figure of Merits ของคลื่นมอดูเลตต่างๆซึ่งจะถูก demodulated ที่เครื่องรับ
อัตราส่วนสัญญาณต่อเสียงรบกวน
Signal-to-Noise Ratio (SNR)คืออัตราส่วนของกำลังสัญญาณต่อพลังเสียง ยิ่งค่า SNR สูงเท่าใดคุณภาพของผลลัพธ์ที่ได้รับก็จะยิ่งมากขึ้นเท่านั้น
Signal-to-Noise Ratio ที่จุดต่าง ๆ สามารถคำนวณได้โดยใช้สูตรต่อไปนี้
Input SNR = $ \ left (SNR \ right) _I = \ frac {Average \: \: power \: \: of \: \: modulating \: \: signal} {Average \: \: power \: \: of \: \: เสียงดัง \: \: ที่ \: \: input} $
Output SNR = $ \ left (SNR \ right) _O = \ frac {Average \: \: power \: \: of \: \: demodulated \: \: signal} {Average \: \: power \: \: of \: \: เสียง \: \: ที่ \: \: output} $
Channel SNR = $ \ left (SNR \ right) _C = \ frac {Average \: \: power \: \: of \: \: modulated \: \: signal} {Average \: \: power \: \: of \: \: noise \: \: in \: \: message \: \: bandwidth} $
ร่างของบุญ
อัตราส่วนของเอาต์พุต SNR และอินพุต SNR สามารถเรียกได้ว่าเป็น Figure of Merit. แสดงโดยF. อธิบายถึงประสิทธิภาพของอุปกรณ์
$$ F = \ frac {\ left (SNR \ right) _O} {\ left (SNR \ right) _I} $$
รูปบุญของผู้รับคือ
$$ F = \ frac {\ left (SNR \ right) _O} {\ left (SNR \ right) _C} $$
เป็นเช่นนั้นเพราะสำหรับเครื่องรับช่องสัญญาณคืออินพุต
การคำนวณ SNR ในระบบ AM
พิจารณารูปแบบตัวรับสัญญาณของระบบ AM ต่อไปนี้เพื่อวิเคราะห์สัญญาณรบกวน

เรารู้ว่าคลื่น Amplitude Modulated (AM) คือ
$$ s \ left (t \ right) = A_c \ left [1 + k_am \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) $$
$$ \ Rightarrow s \ left (t \ right) = A_c \ cos \ left (2 \ pi f_ct \ right) + A_ck_am \ left (t \ right) \ cos \ left (2 \ pi f_ct \ right) $$
กำลังเฉลี่ยของคลื่น AM คือ
$$ P_s = \ left (\ frac {A_c} {\ sqrt {2}} \ right) ^ 2 + \ left (\ frac {A_ck_am \ left (t \ right)} {\ sqrt {2}} \ right) ^ 2 = \ frac {{A_ {c}} ^ {2}} {2} + \ frac {{A_ {c}} ^ {2} {k_ {a}} ^ {2} P} {2} $ $
$$ \ Rightarrow P_s = \ frac {{A_ {c}} ^ {2} \ left (1+ {k_ {a}} ^ {2} P \ right)} {2} $$
พลังเสียงเฉลี่ยในแบนด์วิดท์ข้อความคือ
$$ P_ {nc} = WN_0 $$
แทนค่าเหล่านี้ใน channel SNR สูตร
$$ \ left (SNR \ right) _ {C, AM} = \ frac {Average \: \: Power \: \: of \: \: AM \: \: Wave} {Average \: \: Power \: \: of \: \: noise \: \: in \: \: message \: \: bandwidth} $$
$$ \ Rightarrow \ left (SNR \ right) _ {C, AM} = \ frac {{A_ {c}} ^ {2} \ left (1+ {k_ {a}} ^ {2} \ right) P } {2WN_0} $$
ที่ไหน
P คือพลังของสัญญาณข้อความ = $ \ frac {{A_ {m}} ^ {2}} {2} $
W คือแบนด์วิดท์ของข้อความ
สมมติว่า band pass noise ผสมกับคลื่น AM ในช่องดังแสดงในรูปด้านบน ชุดค่าผสมนี้ถูกนำไปใช้ที่อินพุตของ AM demodulator ดังนั้นอินพุตของ AM demodulator คือ
$$ v \ left (t \ right) = s \ left (t \ right) + n \ left (t \ right) $$
$ \ Rightarrow v \ left (t \ right) = A_c \ left [1 + k_am \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) + $
$ \ left [n_1 \ left (t \ right) \ cos \ left (2 \ pi f_ct \ right) - n_Q \ left (t \ right) \ sin \ left (2 \ pi f_ct \ right) \ right] $
$ \ Rightarrow v \ left (t \ right) = \ left [A_c + A_ck_am \ left (t \ right) + n_1 \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) - n_Q \ left (t \ right) \ sin \ left (2 \ pi f_ct \ right) $
โดยที่ $ n_I \ left (t \ right) $ และ $ n_Q \ left (t \ right) $ อยู่ในองค์ประกอบเฟสเฟสและกำลังสองของสัญญาณรบกวน
เอาต์พุตของ AM demodulator ไม่มีอะไรนอกจากซองของสัญญาณด้านบน
$$ d \ left (t \ right) = \ sqrt {\ left [A_c + A_cK_am \ left (t \ right) + n_I \ left (t \ right) \ right] ^ 2 + \ left (n_Q \ left (t \ right) \ right) ^ 2} $$
$$ \ Rightarrow d \ left (t \ right) \ ประมาณ A_c + A_ck_am \ left (t \ right) + n_1 \ left (t \ right) $$
กำลังเฉลี่ยของสัญญาณ demodulated คือ
$$ P_m = \ left (\ frac {A_ck_am \ left (t \ right)} {\ sqrt {2}} \ right) ^ 2 = \ frac {{A_ {c}} ^ {2} {k_ {a} } ^ {2} P} {2} $$
กำลังเฉลี่ยของสัญญาณรบกวนที่เอาต์พุตคือ
$$ P_no = WN_0 $$
แทนค่าเหล่านี้ใน output SNR สูตร.
$$ \ left (SNR \ right) _ {O, AM} = \ frac {Average \: \: Power \: \: of \: \: demodulated \: \: signal} {Average \: \: Power \: \: of \: \: noise \: \: at \: \: Output} $$
$$ \ Rightarrow \ left (SNR \ right) _ {O, AM} = \ frac {{A_ {c}} ^ {2} {k_ {a}} ^ {2} P} {2WN_0} $$
แทนค่าใน Figure of merit ของสูตรตัวรับ AM
$$ F = \ frac {\ left (SNR \ right) _ {O, AM}} {\ left (SNR \ right) _ {C, AM}} $$
$$ \ Rightarrow F = \ left (\ frac {{A_ {c} ^ {2}} {k_ {a} ^ {2}} P} {2WN_0} \ right) / \ left (\ frac {{A_ { c}} ^ {2} \ left (1+ {k_ {a}} ^ {2} \ right) P} {2WN_0} \ right) $$
$$ \ Rightarrow F = \ frac {{K_ {a}} ^ {2} P} {1+ {K_ {a}} ^ {2} P} $$
ดังนั้นรูปบุญของเครื่องรับ AM จึงน้อยกว่าหนึ่ง
การคำนวณ SNR ในระบบ DSBSC
พิจารณารูปแบบตัวรับสัญญาณต่อไปนี้ของระบบ DSBSC เพื่อวิเคราะห์สัญญาณรบกวน

เรารู้ว่าคลื่นมอดูเลต DSBSC คือ
$$ s \ left (t \ right) = A_cm \ left (t \ right) \ cos \ left (2 \ pi f_ct \ right) $$
กำลังเฉลี่ยของคลื่นมอดูเลต DSBSC คือ
$$ P_s = \ left (\ frac {A_cm \ left (t \ right)} {\ sqrt {2}} \ right) ^ 2 = \ frac {{A_ {c}} ^ {2} P} {2} $$
พลังเสียงเฉลี่ยในแบนด์วิดท์ข้อความคือ
$$ P_ {nc} = WN_0 $$
แทนค่าเหล่านี้ใน channel SNR สูตร.
$$ \ left (SNR \ right) _ {C, DSBSC} = \ frac {Average \: \: Power \: \: of \: \: DSBSC \: \: modulated \: \: wave} {Average \: \: Power \: \: of \: \: noise \: \: in \: \: message \: \: bandwidth} $$
$$ \ Rightarrow \ left (SNR \ right) _ {C, DSBSC} = \ frac {{A_ {c}} ^ {2} P} {2WN_0} $$
สมมติว่าสัญญาณรบกวนของแบนด์พาสผสมกับคลื่นมอดูเลต DSBSC ในช่องสัญญาณดังแสดงในรูปด้านบน ชุดค่าผสมนี้ใช้เป็นหนึ่งในอินพุตไปยังตัวปรับแต่งผลิตภัณฑ์ ดังนั้นอินพุตของโมดูเลเตอร์ผลิตภัณฑ์นี้คือ
$$ v_1 \ left (t \ right) = s \ left (t \ right) + n \ left (t \ right) $$
$$ \ Rightarrow v_1 \ left (t \ right) = A_cm \ left (t \ right) \ cos \ left (2 \ pi f_ct \ right) + \ left [n_I \ left (t \ right) \ cos \ left ( 2 \ pi f_ct \ right) - n_Q \ left (t \ right) \ sin \ left (2 \ pi f_ct \ right) \ right] $$
$$ \ Rightarrow v_1 \ left (t \ right) = \ left [A_cm \ left (t \ right) + n_I \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right) -n_Q \ left (t \ right) \ sin \ left (2 \ pi f_ct \ right) $$
ออสซิลเลเตอร์ภายในสร้างสัญญาณพาหะ $ c \ left (t \ right) = \ cos \ left (2 \ pi f_ct \ right) $ สัญญาณนี้ถูกนำไปใช้เป็นอินพุตอื่นสำหรับโมดูเลเตอร์ผลิตภัณฑ์ ดังนั้นโมดูเลเตอร์ของผลิตภัณฑ์จึงสร้างเอาต์พุตซึ่งเป็นผลคูณของ $ v_1 \ left (t \ right) $ และ $ c \ left (t \ right) $
$$ v_2 \ left (t \ right) = v_1 \ left (t \ right) c \ left (t \ right) $$
แทนค่า $ v_1 \ left (t \ right) $ และ $ c \ left (t \ right) $ ในสมการด้านบน
$$ \ Rightarrow v_2 \ left (t \ right) = \ left (\ left [A_cm \ left (t \ right) + n_I \ left (t \ right) \ right] \ cos \ left (2 \ pi f_ct \ right ) - n_Q \ left (t \ right) \ sin \ left (2 \ pi f_ct \ right) \ right) \ cos \ left (2 \ pi f_ct \ right) $$
$$ \ Rightarrow v_2 \ left (t \ right) = \ left [A_c m \ left (t \ right) + n_I \ left (t \ right) \ right] \ cos ^ 2 \ left (2 \ pi f_ct \ right ) -n_Q \ left (t \ right) \ sin \ left (2 \ pi f_ct \ right) \ cos \ left (2 \ pi f_ct \ right) $$
$$ \ Rightarrow v_2 \ left (t \ right) = \ left [A_c m \ left (t \ right) + n_I \ left (t \ right) \ right] \ left (\ frac {1+ \ cos \ left ( 4 \ pi f_ct \ right)} {2} \ right) -n_Q \ left (t \ right) \ frac {\ sin \ left (4 \ pi f_ct \ right)} {2} $$
เมื่อสัญญาณข้างต้นถูกนำไปใช้เป็นอินพุตไปยังตัวกรองความถี่ต่ำเราจะได้ผลลัพธ์ของตัวกรองความถี่ต่ำเป็น
$$ d \ left (t \ right) = \ frac {\ left [A_c m \ left (t \ right) + n_I \ left (t \ right) \ right]} {2} $$
กำลังเฉลี่ยของสัญญาณ demodulated คือ
$$ P_m = \ left (\ frac {A_cm \ left (t \ right)} {2 \ sqrt {2}} \ right) ^ 2 = \ frac {{A_ {c}} ^ {2} P} {8 } $$
กำลังเฉลี่ยของสัญญาณรบกวนที่เอาต์พุตคือ
$$ P_ {no} = \ frac {WN_0} {4} $$
แทนค่าเหล่านี้ใน output SNR สูตร.
$$ \ left (SNR \ right) _ {O, DSBSC} = \ frac {Average \: \: Power \: \: of \: \: demodulated \: \: signal} {Average \: \: Power \: \: of \: \: noise \: \: at \: \: Output} $$
$$ \ Rightarrow \ left (SNR \ right) _ {O, DSBSC} = \ left (\ frac {{A_ {c}} ^ {2} P} {8} \ right) / \ left (\ frac {WN_0 } {4} \ right) = \ frac {{A_ {c}} ^ {2} P} {2WN_0} $$
แทนค่าใน Figure of merit ของสูตรตัวรับ DSBSC
$$ F = \ frac {\ left (SNR \ right) _ {O, DSBSC}} {\ left (SNR \ right) _ {C, DSBSC}} $$
$$ \ Rightarrow F = \ left (\ frac {{A_ {c}} ^ {2} P} {2WN_0} \ right) / \ left (\ frac {{A_ {c}} ^ {2} P} { 2WN_0} \ right) $$
$$ \ Rightarrow F = 1 $$
ดังนั้นรูปของคุณสมบัติของเครื่องรับ DSBSC คือ 1
การคำนวณ SNR ในระบบ SSBSC
พิจารณารูปแบบตัวรับสัญญาณต่อไปนี้ของระบบ SSBSC เพื่อวิเคราะห์สัญญาณรบกวน
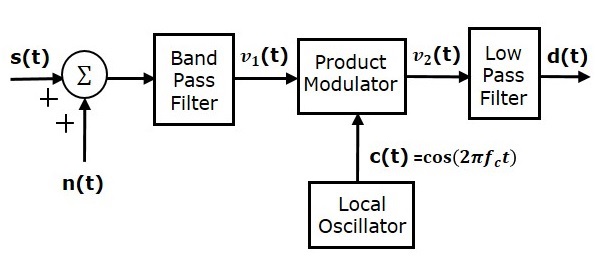
เรารู้ว่าคลื่นมอดูเลต SSBSC ที่มีแถบด้านข้างต่ำกว่าคือ
$$ s \ left (t \ right) = \ frac {A_mA_c} {2} \ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] $$
กำลังเฉลี่ยของคลื่นมอดูเลต SSBSC คือ
$$ P_s = \ left (\ frac {A_mA_c} {2 \ sqrt {2}} \ right) ^ 2 = \ frac {{A_ {m}} ^ {2} {A_ {c}} ^ {2}} {8} $$
พลังเสียงเฉลี่ยในแบนด์วิดท์ข้อความคือ
$$ P_ {nc} = WN_0 $$
แทนค่าเหล่านี้ใน channel SNR สูตร.
$$ \ left (SNR \ right) _ {C, SSBSC} = \ frac {Average \: \: Power \: \: of \: \: SSBSC \: \: modulated \: \: wave} {Average \: \: Power \: \: of \: \: noise \: \: in \: \: message \: \: bandwidth} $$
$$ \ Rightarrow \ left (SNR \ right) _ {C, SSBSC} = \ frac {{A_ {m}} ^ {2} {A_ {c}} ^ {2}} {8WN_0} $$
สมมติว่าสัญญาณรบกวนของแบนด์พาสผสมกับคลื่นมอดูเลต SSBSC ในช่องดังแสดงในรูปด้านบน ชุดค่าผสมนี้ใช้เป็นหนึ่งในอินพุตไปยังตัวปรับแต่งผลิตภัณฑ์ ดังนั้นอินพุตของโมดูเลเตอร์ผลิตภัณฑ์นี้คือ
$$ v_1 \ left (t \ right) = s \ left (t \ right) + n \ left (t \ right) $$
$$ v_1 \ left (t \ right) = \ frac {A_mA_c} {2} \ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] + n_I \ left (t \ right) \ cos \ left (2 \ pi f_ct \ right) -n_Q \ left (t \ right) \ sin \ left (2 \ pi f_ct \ right) $$
ออสซิลเลเตอร์ท้องถิ่นสร้างสัญญาณพาหะ $ c \ left (t \ right) = \ cos \ left (2 \ pi f_ct \ right) $ สัญญาณนี้ถูกนำไปใช้เป็นอินพุตอื่นสำหรับโมดูเลเตอร์ผลิตภัณฑ์ ดังนั้นโมดูเลเตอร์ของผลิตภัณฑ์จึงสร้างเอาต์พุตซึ่งเป็นผลคูณของ $ v_1 \ left (t \ right) $ และ $ c \ left (t \ right) $
$$ v_2 \ left (t \ right) = v_1 \ left (t \ right) c \ left (t \ right) $$
แทนค่า $ v_1 \ left (t \ right) $ และ $ c \ left (t \ right) $ ในสมการด้านบน
$ \ Rightarrow v_2 (t) = (\ frac {A_mA_c} {2} \ cos [2 \ pi (f_c-f_m) เสื้อ] + n_I (t) \ cos (2 \ pi f_ct) - $
$ n_Q (t) \ sin (2 \ pi f_ct)) \ cos (2 \ pi f_ct) $
$ \ Rightarrow v_2 \ left (t \ right) = \ frac {A_mA_c} {2} \ cos \ left [2 \ pi \ left (f_c-f_m \ right) t \ right] \ cos \ left (2 \ pi f_ct \ right) + $
$ n_I \ left (t \ right) \ cos ^ 2 \ left (2 \ pi f_ct \ right) -n_Q \ left (t \ right) \ sin \ left (2 \ pi f_ct \ right) \ cos \ left (2 \ pi f_ct \ right) $
$ \ Rightarrow v_2 \ left (t \ right) = \ frac {A_mA_c} {4} \ left \ {\ cos \ left [2 \ pi \ left (2f_c-f_m \ right) t \ right] + \ cos \ left (2 \ pi f_mt \ right) \ right \} + $
$ n_I \ left (t \ right) \ left (\ frac {1+ \ cos \ left (4 \ pi f_ct \ right)} {2} \ right) - n_Q \ left (t \ right) \ frac {\ sin \ left (4 \ pi f_ct \ right)} {2} $
เมื่อสัญญาณข้างต้นถูกนำไปใช้เป็นอินพุตไปยังตัวกรองความถี่ต่ำเราจะได้ผลลัพธ์ของตัวกรองความถี่ต่ำเป็น
$$ d \ left (t \ right) = \ frac {A_mA_c} {2} \ cos \ left (2 \ pi f_mt \ right) + \ frac {n_I \ left (t \ right)} {2} $$
กำลังเฉลี่ยของสัญญาณ demodulated คือ
$$ P_m = \ left (\ frac {A_mA_c} {4 \ sqrt {2}} \ right) ^ 2 = \ frac {{A_ {m}} ^ {2} {A_ {c}} ^ {2}} {32} $$
กำลังเฉลี่ยของสัญญาณรบกวนที่เอาต์พุตคือ
$$ P_ {no} = \ frac {WN_0} {4} $$
แทนค่าเหล่านี้ใน output SNR สูตร
$$ \ left (SNR \ right) _ {O, SSBSC} = \ frac {Average \: \: Power \: \: of \: \: demodulated \: \: signal} {Average \: \: Power \: \: of \: \: noise \: \: at \: \: output} $$
$$ \ Rightarrow \ left (SNR \ right) _ {O, SSBSC} = \ left (\ frac {{A_ {m}} ^ {2} {A_ {c}} ^ {2}} {32} \ right ) / \ left (\ frac {WN_0} {4} \ right) = \ frac {{A_ {m}} ^ {2} {A_ {c}} ^ {2}} {8WN_0} $$
แทนค่าใน Figure of merit ของสูตรรับ SSBSC
$$ F = \ frac {\ left (SNR \ right) _ {O, SSBSC}} {\ left (SNR \ right) _ {C, SSBSC}} $$
$$ F = \ left (\ frac {{A_ {m}} ^ {2} {A_ {c}} ^ {2}} {8WN_0} \ right) / \ left (\ frac {{A_ {m}} ^ {2} {A_ {c}} ^ {2}} {8WN_0} \ right) $$
$$ F = 1 $$
ดังนั้นรูปของคุณธรรมของเครื่องรับ SSBSC คือ 1
เสาอากาศอยู่ที่ส่วนท้ายของส่วนเครื่องส่งสัญญาณส่งคลื่นมอดูเลต ในบทนี้ให้เราพูดคุยเกี่ยวกับเครื่องส่ง AM และ FM
เครื่องส่ง AM
เครื่องส่ง AM รับสัญญาณเสียงเป็นอินพุตและส่งคลื่นมอดูเลตแอมพลิจูดไปยังเสาอากาศเป็นเอาต์พุตที่จะส่ง แผนภาพบล็อกของเครื่องส่ง AM แสดงดังรูปต่อไปนี้
การทำงานของเครื่องส่ง AM สามารถอธิบายได้ดังนี้
สัญญาณเสียงจากเอาต์พุตของไมโครโฟนจะถูกส่งไปยังพรีแอมพลิฟายเออร์ซึ่งจะช่วยเพิ่มระดับของสัญญาณมอดูเลต
RF oscillator สร้างสัญญาณพาหะ
ทั้งสัญญาณมอดูเลตและสัญญาณพาหะจะถูกส่งไปยังโมดูเลเตอร์ AM
เครื่องขยายเสียงใช้เพื่อเพิ่มระดับพลังงานของคลื่น AM คลื่นนี้จะถูกส่งผ่านไปยังเสาอากาศที่จะส่งในที่สุด
เครื่องส่ง FM
เครื่องส่ง FM เป็นหน่วยทั้งหมดซึ่งรับสัญญาณเสียงเป็นอินพุตและส่งคลื่น FM ไปยังเสาอากาศเป็นเอาต์พุตที่จะส่ง แผนภาพบล็อกของเครื่องส่ง FM แสดงดังรูปต่อไปนี้
การทำงานของเครื่องส่ง FM สามารถอธิบายได้ดังนี้
สัญญาณเสียงจากเอาต์พุตของไมโครโฟนจะถูกส่งไปยังพรีแอมพลิฟายเออร์ซึ่งจะช่วยเพิ่มระดับของสัญญาณมอดูเลต
จากนั้นสัญญาณนี้จะถูกส่งผ่านไปยังตัวกรองความถี่สูงซึ่งทำหน้าที่เป็นเครือข่ายก่อนการเน้นเพื่อกรองสัญญาณรบกวนและปรับปรุงอัตราส่วนสัญญาณต่อเสียงรบกวน
สัญญาณนี้จะถูกส่งต่อไปยังวงจรโมดูเลเตอร์ FM
วงจรออสซิลเลเตอร์สร้างพาหะความถี่สูงซึ่งส่งไปยังโมดูเลเตอร์พร้อมกับสัญญาณมอดูเลต
ใช้ตัวคูณความถี่หลายขั้นตอนเพื่อเพิ่มความถี่ในการทำงาน ถึงกระนั้นพลังของสัญญาณก็ไม่เพียงพอที่จะส่ง ดังนั้นจึงใช้เพาเวอร์แอมป์ RF ที่ส่วนท้ายเพื่อเพิ่มพลังของสัญญาณมอดูเลต ในที่สุดเอาท์พุตแบบมอดูเลต FM นี้จะถูกส่งไปยังเสาอากาศที่จะส่ง
เสาอากาศอยู่ที่จุดเริ่มต้นของส่วนเครื่องรับรับคลื่นมอดูเลต ก่อนอื่นให้เราหารือเกี่ยวกับข้อกำหนดของผู้รับ
ข้อกำหนดของผู้รับ
เครื่องรับ AM รับคลื่น AM และถอดรหัสโดยใช้เครื่องตรวจจับซองจดหมาย ในทำนองเดียวกันเครื่องรับ FM จะรับคลื่น FM และทำการถอดรหัสโดยใช้วิธีการแยกแยะความถี่ ต่อไปนี้เป็นข้อกำหนดของเครื่องรับ AM และ FM
มันควรจะคุ้มทุน
ควรได้รับคลื่นมอดูเลตที่สอดคล้องกัน
เครื่องรับควรสามารถปรับแต่งและขยายสถานีที่ต้องการได้
ควรมีความสามารถในการปฏิเสธสถานีที่ไม่ต้องการ
ต้องทำการ Demodulation กับสัญญาณสถานีทั้งหมดโดยไม่คำนึงถึงความถี่สัญญาณของผู้ให้บริการ
เพื่อให้เป็นไปตามข้อกำหนดเหล่านี้วงจรจูนเนอร์และวงจรมิกเซอร์ควรมีประสิทธิภาพมาก ขั้นตอนของการผสม RF เป็นปรากฏการณ์ที่น่าสนใจ
การผสม RF
หน่วยผสม RF พัฒนาไฟล์ Intermediate Frequency (IF) ซึ่งจะแปลงสัญญาณที่ได้รับเพื่อประมวลผลสัญญาณอย่างมีประสิทธิภาพ
RF Mixer เป็นขั้นตอนสำคัญในเครื่องรับ สัญญาณสองสัญญาณที่มีความถี่ต่างกันจะถูกนำมาซึ่งระดับสัญญาณหนึ่งมีผลต่อระดับของสัญญาณอื่นเพื่อสร้างเอาต์พุตแบบผสมที่เป็นผลลัพธ์ สัญญาณอินพุตและเอาต์พุตมิกเซอร์ผลลัพธ์แสดงในรูปต่อไปนี้
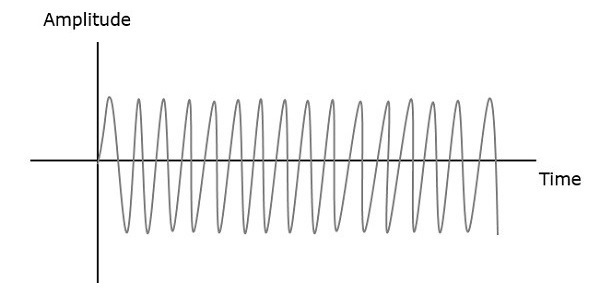

ให้ความถี่สัญญาณแรกและวินาทีเป็น $ f_1 $ และ $ f_2 $ หากใช้สัญญาณทั้งสองนี้เป็นอินพุตของเครื่องผสม RF สัญญาณจะสร้างสัญญาณเอาต์พุตโดยมีความถี่ $ f_1 + f_2 $ และ $ f_1-f_2 $
หากสังเกตสิ่งนี้ในโดเมนความถี่รูปแบบจะมีลักษณะดังรูปต่อไปนี้

ในกรณีนี้ $ f_1 $ มากกว่า $ f_2 $ ดังนั้นผลลัพธ์ผลลัพธ์จึงมีความถี่ $ f_1 + f_2 $ และ $ f_1-f_2 $ ในทำนองเดียวกันถ้า $ f_2 $ มากกว่า $ f_1 $ ผลลัพธ์ที่ได้จะมีความถี่ $ f_1 + f_2 $ และ $ f_1-f_2 $
เครื่องรับ AM
เครื่องรับ AM super heterodyne ใช้คลื่นมอดูเลตแอมพลิจูดเป็นอินพุตและสร้างสัญญาณเสียงดั้งเดิมเป็นเอาต์พุต Selectivity คือความสามารถในการเลือกสัญญาณเฉพาะในขณะที่ปฏิเสธสัญญาณอื่น ๆ Sensitivity คือความสามารถในการตรวจจับสัญญาณ RF และ demodulating ขณะที่ระดับพลังงานต่ำสุด
นักวิทยุสมัครเล่นเป็นเครื่องรับวิทยุเริ่มต้น อย่างไรก็ตามพวกเขามีข้อเสียเช่นความไวและการเลือกที่ไม่ดี เพื่อเอาชนะข้อบกพร่องเหล่านี้super heterodyneเครื่องรับถูกคิดค้นขึ้น แผนภาพบล็อกของเครื่องรับ AM แสดงดังรูปต่อไปนี้

ส่วนจูนเนอร์ RF
คลื่นมอดูเลตแอมพลิจูดที่ได้รับจากเสาอากาศจะถูกส่งไปยัง tuner circuitผ่านหม้อแปลง วงจรจูนเนอร์เป็นเพียงวงจร LC ซึ่งเรียกอีกอย่างว่าresonant หรือ tank circuit. เลือกความถี่ที่ต้องการโดยเครื่องรับ AM นอกจากนี้ยังปรับแต่งออสซิลเลเตอร์ท้องถิ่นและฟิลเตอร์ RF ในเวลาเดียวกัน
เครื่องผสม RF
สัญญาณจากเอาต์พุตของเครื่องรับสัญญาณจะถูกส่งไปยังไฟล์ RF-IF converterซึ่งทำหน้าที่เป็นเครื่องผสม มีออสซิลเลเตอร์ท้องถิ่นซึ่งสร้างความถี่คงที่ ขั้นตอนการผสมจะทำที่นี่โดยมีสัญญาณที่ได้รับเป็นอินพุตหนึ่งและความถี่ของออสซิลเลเตอร์ท้องถิ่นเป็นอินพุตอื่น ผลลัพธ์ที่ได้คือส่วนผสมของสองความถี่ $ \ left [\ left (f_1 + f_2 \ right), \ left (f_1-f_2 \ right) \ right] $ ที่สร้างโดยมิกเซอร์ซึ่งเรียกว่าIntermediate Frequency (IF).
การผลิต IF ช่วยในการ demodulation ของสัญญาณสถานีใด ๆ ที่มีความถี่พาหะ ดังนั้นสัญญาณทั้งหมดจะถูกแปลเป็นความถี่พาหะคงที่เพื่อการเลือกที่เพียงพอ
ถ้ากรอง
ตัวกรองความถี่ระดับกลางคือตัวกรองคลื่นความถี่ซึ่งส่งผ่านความถี่ที่ต้องการ มันกำจัดส่วนประกอบความถี่ที่ไม่ต้องการอื่น ๆ ทั้งหมดที่มีอยู่ในนั้น นี่เป็นข้อดีของตัวกรอง IF ซึ่งอนุญาตเฉพาะความถี่ IF
AM Demodulator
ตอนนี้คลื่น AM ที่ได้รับจะถูก demodulated โดยใช้ AM demodulator เครื่องถอดรหัสนี้ใช้กระบวนการตรวจจับซองจดหมายเพื่อรับสัญญาณมอดูเลต
เครื่องขยายเสียง
นี่คือขั้นตอนของเครื่องขยายเสียงซึ่งใช้ในการขยายสัญญาณเสียงที่ตรวจพบ สัญญาณที่ประมวลผลได้รับการเสริมสร้างให้มีประสิทธิภาพ สัญญาณนี้จะถูกส่งต่อไปยังลำโพงเพื่อรับสัญญาณเสียงต้นฉบับ
เครื่องรับ FM
แผนภาพบล็อกของเครื่องรับ FM แสดงดังรูปต่อไปนี้

แผนภาพบล็อกของเครื่องรับ FM นี้คล้ายกับแผนภาพบล็อกของเครื่องรับ AM ตัว จำกัด แอมพลิจูดสองบล็อกและเครือข่าย De-focus รวมอยู่ก่อนและหลัง FM demodulator การทำงานของบล็อกที่เหลือจะเหมือนกับของเครื่องรับ AM
เราทราบดีว่าในการมอดูเลต FM ความกว้างของคลื่น FM จะคงที่ อย่างไรก็ตามหากมีการเพิ่มสัญญาณรบกวนบางส่วนด้วยคลื่น FM ในช่องสัญญาณเนื่องจากความกว้างของคลื่น FM อาจแตกต่างกันไป ดังนั้นด้วยความช่วยเหลือของamplitude limiter เราสามารถรักษาความกว้างของคลื่น FM ให้คงที่โดยการลบจุดสูงสุดที่ไม่ต้องการของสัญญาณรบกวน
ในเครื่องส่ง FM เราได้เห็นเครือข่ายก่อนเน้น (ตัวกรองความถี่สูง) ซึ่งมีอยู่ก่อนโมดูเลเตอร์ FM ใช้เพื่อปรับปรุง SNR ของสัญญาณเสียงความถี่สูง กระบวนการย้อนกลับของการเน้นล่วงหน้าเรียกว่าde-emphasis. ดังนั้นในเครื่องรับ FM นี้เครือข่ายที่ไม่เน้น (ตัวกรองความถี่ต่ำ) จะรวมอยู่หลังเครื่องถอดรหัส FM สัญญาณนี้จะถูกส่งผ่านไปยังเครื่องขยายเสียงเพื่อเพิ่มระดับพลังงาน สุดท้ายเราจะได้รับสัญญาณเสียงต้นฉบับจากลำโพง
จนถึงตอนนี้เราได้พูดคุยเกี่ยวกับการมอดูเลตคลื่นต่อเนื่อง เราจะพูดถึงการมอดูเลตของพัลส์ในบทถัดไป เทคนิคการมอดูเลตพัลส์เหล่านี้จัดการกับสัญญาณที่ไม่ต่อเนื่อง ตอนนี้ให้เราดูวิธีการแปลงสัญญาณเวลาต่อเนื่องเป็นสัญญาณที่ไม่ต่อเนื่อง
กระบวนการแปลงสัญญาณเวลาต่อเนื่องเป็นสัญญาณเวลาไม่ต่อเนื่องเทียบเท่าสามารถเรียกได้ว่า Sampling. ข้อมูลบางส่วนจะถูกสุ่มตัวอย่างอย่างต่อเนื่องในกระบวนการสุ่มตัวอย่าง
รูปต่อไปนี้แสดงสัญญาณเวลาต่อเนื่อง x(t) และสัญญาณตัวอย่างที่สอดคล้องกัน xs(t). เมื่อไหร่x(t) คูณด้วยรถไฟอิมพัลส์เป็นระยะซึ่งเป็นสัญญาณตัวอย่าง xs(t) ได้รับ

ก sampling signal เป็นรถไฟพัลส์เป็นระยะโดยมีแอมพลิจูดของหน่วยสุ่มตัวอย่างในช่วงเวลาที่เท่ากัน $ T_s $ ซึ่งเรียกว่า sampling time. ข้อมูลนี้จะถูกส่งในเวลาที่อินสแตนซ์ $ T_s $ และสัญญาณของผู้ให้บริการจะถูกส่งในเวลาที่เหลือ
อัตราการสุ่มตัวอย่าง
ในการแยกแยะสัญญาณควรแก้ไขช่องว่างระหว่างตัวอย่าง ช่องว่างนั้นสามารถเรียกได้ว่าเป็นช่วงการสุ่มตัวอย่าง $ T_s $ ซึ่งกันและกันของช่วงเวลาการสุ่มตัวอย่างเรียกว่าsampling frequency หรือ sampling rate $f_s$.
ในทางคณิตศาสตร์เราสามารถเขียนเป็น
$$ f_s = \ frac {1} {T_s} $$
ที่ไหน
$ f_s $ คือความถี่ในการสุ่มตัวอย่างหรืออัตราการสุ่มตัวอย่าง
$ T_s $ คือช่วงการสุ่มตัวอย่าง
ทฤษฎีบทการสุ่มตัวอย่าง
อัตราการสุ่มตัวอย่างควรเป็นแบบที่ข้อมูลในสัญญาณข้อความไม่ควรสูญหายและไม่ควรถูกทับ sampling theorem ระบุว่า“ สัญญาณสามารถทำซ้ำได้ทุกประการหากสุ่มตัวอย่างที่อัตรา $ f_s $ ซึ่งมากกว่าหรือเท่ากับสองเท่าของความถี่สูงสุดของสัญญาณที่กำหนด W.”
ในทางคณิตศาสตร์เราสามารถเขียนเป็น
$$ f_s \ geq 2W $$
ที่ไหน
$ f_s $ คืออัตราการสุ่มตัวอย่าง
$ W $ คือความถี่สูงสุดของสัญญาณที่กำหนด
หากอัตราการสุ่มตัวอย่างเท่ากับสองเท่าของความถี่สูงสุดของสัญญาณ W ที่กำหนดจะเรียกว่าเป็น Nyquist rate.
ทฤษฎีบทการสุ่มตัวอย่างซึ่งเรียกอีกอย่างว่า Nyquist theoremนำเสนอทฤษฎีอัตราตัวอย่างที่เพียงพอในแง่ของแบนด์วิดท์สำหรับคลาสของฟังก์ชันที่ จำกัด แบนด์วิดท์
สำหรับสัญญาณเวลาต่อเนื่อง x(t)ซึ่ง จำกัด วงในโดเมนความถี่จะแสดงดังแสดงในรูปต่อไปนี้

หากสัญญาณถูกสุ่มตัวอย่างสูงกว่าอัตรา Nyquist สัญญาณเดิมจะสามารถกู้คืนได้ รูปต่อไปนี้อธิบายสัญญาณหากสุ่มตัวอย่างด้วยอัตราที่สูงกว่า2w ในโดเมนความถี่
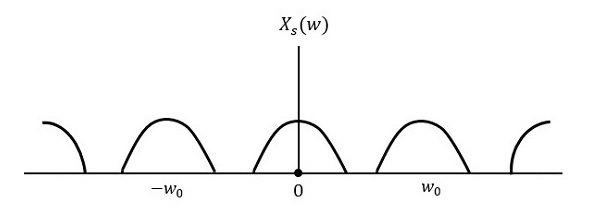
หากมีการสุ่มตัวอย่างสัญญาณเดียวกันในอัตราที่น้อยกว่า 2wจากนั้นสัญญาณตัวอย่างจะมีลักษณะดังรูปต่อไปนี้

เราสามารถสังเกตได้จากรูปแบบข้างต้นว่ามีข้อมูลมากเกินไปซึ่งนำไปสู่การปะปนและการสูญเสียข้อมูล ปรากฏการณ์ที่ไม่ต้องการของการทับซ้อนนี้เรียกว่าAliasing.
การใช้นามแฝงสามารถเรียกได้ว่าเป็น "ปรากฏการณ์ของส่วนประกอบความถี่สูงในสเปกตรัมของสัญญาณโดยใช้ข้อมูลประจำตัวของส่วนประกอบความถี่ต่ำในสเปกตรัมของเวอร์ชันตัวอย่าง"
ดังนั้นอัตราการสุ่มตัวอย่างของสัญญาณจึงถูกเลือกให้เป็นอัตรา Nyquist หากอัตราการสุ่มตัวอย่างเท่ากับสองเท่าของความถี่สูงสุดของสัญญาณที่กำหนดWจากนั้นสัญญาณตัวอย่างจะมีลักษณะดังรูปต่อไปนี้

ในกรณีนี้สัญญาณสามารถกู้คืนได้โดยไม่มีการสูญเสียใด ๆ ดังนั้นนี่จึงเป็นอัตราการสุ่มตัวอย่างที่ดี
หลังจากการมอดูเลตคลื่นต่อเนื่องส่วนถัดไปคือการมอดูเลตแบบพัลส์ ในบทนี้ให้เราพูดถึงเทคนิคการมอดูเลตแบบแอนะล็อกต่อไปนี้
- Pulse Amplitude Modulation
- การมอดูเลตความกว้างพัลส์
- การปรับตำแหน่งพัลส์
Pulse Amplitude Modulation
ใน Pulse Amplitude Modulation (PAM) เทคนิคแอมพลิจูดของพัลส์พาหะจะแตกต่างกันไปซึ่งเป็นสัดส่วนกับแอมพลิจูดของสัญญาณข้อความทันที
สัญญาณมอดูเลตแอมพลิจูดพัลส์จะเป็นไปตามแอมพลิจูดของสัญญาณเดิมเนื่องจากสัญญาณจะติดตามเส้นทางของคลื่นทั้งหมด ใน PAM ตามธรรมชาติสัญญาณที่สุ่มตัวอย่างด้วยอัตรา Nyquist สามารถสร้างขึ้นใหม่ได้โดยส่งผ่านสัญญาณที่มีประสิทธิภาพLow Pass Filter (LPF) ด้วยความถี่ตัดที่แน่นอน
ตัวเลขต่อไปนี้อธิบายการมอดูเลต Pulse Amplitude



แม้ว่าสัญญาณ PAM จะถูกส่งผ่าน LPF แต่ก็ไม่สามารถกู้คืนสัญญาณได้โดยไม่ผิดเพี้ยน ดังนั้นเพื่อหลีกเลี่ยงเสียงรบกวนนี้ให้ใช้การสุ่มตัวอย่างแบบแบน สัญญาณ PAM แบบแบนแสดงดังรูปต่อไปนี้

Flat-top samplingเป็นกระบวนการที่สัญญาณตัวอย่างสามารถแสดงเป็นพัลส์ซึ่งความกว้างของสัญญาณไม่สามารถเปลี่ยนแปลงได้เมื่อเทียบกับสัญญาณแอนะล็อกที่จะสุ่มตัวอย่าง ส่วนบนของแอมพลิจูดยังคงแบน กระบวนการนี้ช่วยลดความยุ่งยากในการออกแบบวงจร
การมอดูเลตความกว้างพัลส์
ใน Pulse Width Modulation (PWM) หรือเทคนิค Pulse Duration Modulation (PDM) หรือ Pulse Time Modulation (PTM) ความกว้างหรือระยะเวลาหรือเวลาของพัลส์พาหะจะแตกต่างกันไปซึ่งเป็นสัดส่วนกับแอมพลิจูดทันทีของสัญญาณข้อความ
ความกว้างของพัลส์จะแตกต่างกันไปในวิธีนี้ แต่ความกว้างของสัญญาณยังคงที่ ตัว จำกัด แอมพลิจูดใช้เพื่อทำให้แอมพลิจูดของสัญญาณคงที่ วงจรเหล่านี้ตัดความกว้างให้อยู่ในระดับที่ต้องการและด้วยเหตุนี้สัญญาณรบกวนจึงถูก จำกัด
รูปต่อไปนี้อธิบายประเภทของการปรับความกว้างพัลส์
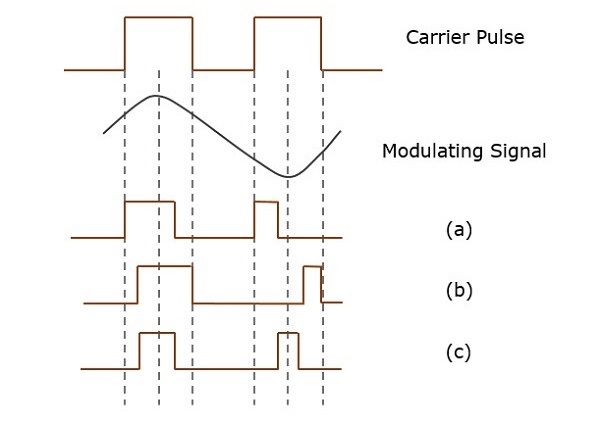
PWM มีสามประเภท
ขอบนำของพัลส์คงที่ขอบต่อท้ายแตกต่างกันไปตามสัญญาณข้อความ รูปคลื่นสำหรับ PWM ประเภทนี้แสดงเป็น (a) ในรูปด้านบน
ขอบด้านท้ายของพัลส์คงที่ขอบนำจะแตกต่างกันไปตามสัญญาณข้อความ รูปคลื่นสำหรับ PWM ประเภทนี้แสดงเป็น (b) ในรูปด้านบน
จุดศูนย์กลางของพัลส์คงที่ขอบนำและขอบด้านท้ายแตกต่างกันไปตามสัญญาณข้อความ รูปคลื่นสำหรับ PWM ประเภทนี้แสดงเป็น (c) ที่แสดงในรูปด้านบน
การปรับตำแหน่งพัลส์
Pulse Position Modulation (PPM) เป็นรูปแบบการมอดูเลตแบบอะนาล็อกซึ่งแอมพลิจูดและความกว้างของพัลส์จะคงที่ในขณะที่ตำแหน่งของแต่ละพัลส์โดยอ้างอิงตำแหน่งของพัลส์อ้างอิงจะแตกต่างกันไปตามค่าตัวอย่างทันทีของสัญญาณข้อความ
เครื่องส่งต้องส่งพัลส์ซิงโครไนซ์ (หรือเพียงแค่ซิงค์พัลส์) เพื่อให้ตัวส่งและตัวรับซิงค์กัน พัลส์ซิงค์เหล่านี้ช่วยรักษาตำแหน่งของพัลส์ ตัวเลขต่อไปนี้อธิบายการมอดูเลตตำแหน่งพัลส์



การมอดูเลตตำแหน่งพัลส์จะทำตามสัญญาณมอดูเลตความกว้างพัลส์ ขอบด้านท้ายของสัญญาณมอดูเลตความกว้างพัลส์จะกลายเป็นจุดเริ่มต้นของพัลส์ในสัญญาณ PPM ดังนั้นตำแหน่งของพัลส์เหล่านี้จึงเป็นสัดส่วนกับความกว้างของพัลส์ PWM
ความได้เปรียบ
เนื่องจากแอมพลิจูดและความกว้างคงที่พลังงานที่จัดการก็จะคงที่เช่นกัน
เสียเปรียบ
การซิงโครไนซ์ระหว่างเครื่องส่งและเครื่องรับเป็นสิ่งที่ต้องทำ
เปรียบเทียบระหว่าง PAM, PWM และ PPM
ตารางต่อไปนี้แสดงการเปรียบเทียบระหว่างเทคนิคการมอดูเลตสามแบบ
| PAM | PWM | พีพีเอ็ม |
|---|---|---|
| แอมพลิจูดมีหลากหลาย | ความกว้างมีหลากหลาย | ตำแหน่งมีหลากหลาย |
| แบนด์วิดท์ขึ้นอยู่กับความกว้างของพัลส์ | แบนด์วิดท์ขึ้นอยู่กับเวลาที่เพิ่มขึ้นของพัลส์ | แบนด์วิดท์ขึ้นอยู่กับเวลาที่เพิ่มขึ้นของพัลส์ |
| กำลังส่งสัญญาณทันทีจะแปรผันตามความกว้างของพัลส์ | กำลังส่งสัญญาณทันทีจะแตกต่างกันไปตามแอมพลิจูดและความกว้างของพัลส์ | กำลังของเครื่องส่งสัญญาณทันทีจะคงที่ตามความกว้างของพัลส์ |
| ความซับซ้อนของระบบสูง | ความซับซ้อนของระบบอยู่ในระดับต่ำ | ความซับซ้อนของระบบอยู่ในระดับต่ำ |
| สัญญาณรบกวนสูง | สัญญาณรบกวนต่ำ | สัญญาณรบกวนต่ำ |
| มันคล้ายกับการมอดูเลตแอมพลิจูด | มันคล้ายกับการมอดูเลตความถี่ | มันคล้ายกับการมอดูเลตเฟส |
Transducerเป็นอุปกรณ์ที่แปลงพลังงานจากรูปแบบหนึ่งไปเป็นอีกรูปแบบหนึ่ง ในบทนี้ให้เราพิจารณาเกี่ยวกับทรานสดิวเซอร์ที่ใช้ในระบบการสื่อสาร
ทำไมเราต้องใช้ Transducers?
ในโลกแห่งความเป็นจริงการสื่อสารระหว่างบุคคลใกล้เคียงสองคนเกิดขึ้นด้วยความช่วยเหลือของคลื่นเสียง แต่ถ้าบุคคลนั้นอยู่ห่างไกลก็ยากที่จะถ่ายทอดข้อมูลโดยไม่สูญเสียใด ๆ โดยใช้คลื่นเสียงในรูปแบบทางกายภาพ
เพื่อเอาชนะความยากนี้เราสามารถใช้โมดูเลเตอร์ในส่วนเครื่องส่งสัญญาณและตัวแยกสัญญาณในส่วนเครื่องรับ โมดูเลเตอร์และเดโมดูเลเตอร์เหล่านี้ทำงานด้วยสัญญาณไฟฟ้า นั่นเป็นเหตุผลว่าทำไมเราจึงต้องใช้อุปกรณ์ซึ่งจะต้องแปลงคลื่นเสียงเป็นสัญญาณไฟฟ้าหรือในทางกลับกัน อุปกรณ์นั้นเรียกว่าทรานสดิวเซอร์
ต่อไปนี้เป็นแผนภาพบล็อกอย่างง่ายของตัวแปลงสัญญาณ
ตัวแปลงสัญญาณนี้มีอินพุตเดียวและเอาต์พุตเดียว จะแปลงพลังงานที่มีอยู่ที่อินพุตเป็นเอาต์พุตที่เทียบเท่าโดยมีพลังงานอื่น โดยทั่วไปแล้วตัวแปลงสัญญาณจะแปลงรูปแบบพลังงานที่ไม่ใช่ไฟฟ้าเป็นรูปแบบไฟฟ้าหรือในทางกลับกัน
ประเภทของทรานสดิวเซอร์
เราสามารถจำแนกทรานสดิวเซอร์ออกเป็นดังต่อไปนี้ two types ขึ้นอยู่กับตำแหน่ง (ตำแหน่ง) ของตัวแปลงสัญญาณในระบบสื่อสาร
- อินพุต Transducer
- ตัวแปลงสัญญาณเอาต์พุต
อินพุตทรานสดิวเซอร์
ตัวแปลงสัญญาณที่อยู่ที่อินพุตของระบบสื่อสารเรียกว่า input transducer. ต่อไปนี้เป็นแผนภาพบล็อกของตัวแปลงสัญญาณอินพุต
ตัวแปลงสัญญาณอินพุตนี้จะแปลงปริมาณทางกายภาพที่ไม่ใช่ไฟฟ้าเป็นสัญญาณไฟฟ้า ปริมาณทางกายภาพเช่นเสียงหรือแสงสามารถแปลงเป็นปริมาณไฟฟ้าเช่นแรงดันไฟฟ้าหรือกระแสไฟฟ้าได้โดยใช้ตัวแปลงสัญญาณนี้Example: ไมโครโฟน
ไมโครโฟนใช้เป็นตัวแปลงสัญญาณอินพุตซึ่งวางอยู่ระหว่างแหล่งข้อมูลและส่วนเครื่องส่งสัญญาณ แหล่งข้อมูลสร้างข้อมูลในรูปของคลื่นเสียง microphoneแปลงคลื่นเสียงเหล่านี้เป็นสัญญาณไฟฟ้าโดยใช้ไดอะแฟรม สัญญาณไฟฟ้าเหล่านี้สามารถใช้สำหรับการประมวลผลต่อไป
ทรานสดิวเซอร์เอาต์พุต
ตัวแปลงสัญญาณที่อยู่ที่เอาต์พุตของระบบสื่อสารเรียกว่าตัวแปลงสัญญาณเอาต์พุต ต่อไปนี้เป็นแผนภาพบล็อกของไฟล์output transducer.
ตัวแปลงสัญญาณเอาต์พุตนี้แปลงสัญญาณไฟฟ้าเป็นปริมาณทางกายภาพที่ไม่ใช่ไฟฟ้า ปริมาณไฟฟ้าเช่นแรงดันไฟฟ้าหรือกระแสสามารถเปลี่ยนเป็นปริมาณทางกายภาพเช่นเสียงหรือแสงได้โดยใช้ตัวแปลงสัญญาณนี้Example: ลำโพง
ลำโพงดังกล่าวใช้เป็นตัวแปลงสัญญาณเอาท์พุตซึ่งวางอยู่ระหว่างส่วนรับและปลายทาง เดโมดูเลเตอร์ที่มีอยู่ในส่วนของเครื่องรับจะสร้างเอาต์พุตเดโมดูเลต ดังนั้นloud speakerแปลงสัญญาณไฟฟ้า (เอาต์พุต demodulated) เป็นคลื่นเสียง ดังนั้นการทำงานของลำโพงจึงตรงข้ามกับการทำงานของไมโครโฟน
นอกจากทรานสดิวเซอร์ข้างต้นแล้วยังมีทรานสดิวเซอร์อีกหนึ่งตัวที่ใช้ในระบบสื่อสาร ตัวแปลงสัญญาณนี้สามารถวางไว้ที่ส่วนท้ายของส่วนเครื่องส่งสัญญาณหรือที่ส่วนเริ่มต้นของส่วนเครื่องรับExample: เสาอากาศ.
เสาอากาศเป็นตัวแปลงสัญญาณซึ่งแปลงสัญญาณไฟฟ้าเป็นคลื่นแม่เหล็กไฟฟ้าและในทางกลับกัน เสาอากาศสามารถใช้เป็นไฟล์transmitting antenna หรือเป็น receiving antenna.
เสาอากาศส่งจะแปลงสัญญาณไฟฟ้าเป็นคลื่นแม่เหล็กไฟฟ้าและแผ่รังสีออกมา ในขณะที่เสาอากาศรับสัญญาณจะแปลงคลื่นแม่เหล็กไฟฟ้าจากลำแสงที่ได้รับเป็นสัญญาณไฟฟ้า
ในการสื่อสารสองทางนี้สามารถใช้เสาอากาศเดียวกันสำหรับทั้งการส่งและการรับ