โครงข่ายประสาทเทียม - คู่มือฉบับย่อ
เครือข่ายประสาทเทียมเป็นอุปกรณ์คอมพิวเตอร์แบบขนานซึ่งโดยพื้นฐานแล้วเป็นความพยายามที่จะสร้างแบบจำลองคอมพิวเตอร์ของสมอง วัตถุประสงค์หลักคือการพัฒนาระบบให้ทำงานด้านการคำนวณต่างๆได้เร็วกว่าระบบแบบเดิม งานเหล่านี้รวมถึงการจดจำและการจำแนกรูปแบบการประมาณการเพิ่มประสิทธิภาพและการจัดกลุ่มข้อมูล
โครงข่ายประสาทเทียมคืออะไร?
โครงข่ายประสาทเทียม (ANN) เป็นระบบคอมพิวเตอร์ที่มีประสิทธิภาพซึ่งมีธีมหลักที่ยืมมาจากการเปรียบเทียบเครือข่ายประสาททางชีววิทยา ANN ยังได้รับการตั้งชื่อเป็น "ระบบประสาทเทียม" หรือ "ระบบประมวลผลแบบกระจายคู่ขนาน" หรือ "ระบบเชื่อมต่อ" ANN ได้รับคอลเลกชันจำนวนมากของหน่วยที่เชื่อมต่อกันในบางรูปแบบเพื่อให้สามารถสื่อสารระหว่างหน่วยได้ หน่วยเหล่านี้เรียกอีกอย่างว่าโหนดหรือเซลล์ประสาทเป็นตัวประมวลผลอย่างง่ายซึ่งทำงานแบบขนาน
เซลล์ประสาททุกเซลล์เชื่อมต่อกับเซลล์ประสาทอื่น ๆ ผ่านลิงค์การเชื่อมต่อ แต่ละลิงค์เชื่อมต่อมีน้ำหนักที่มีข้อมูลเกี่ยวกับสัญญาณอินพุต นี่เป็นข้อมูลที่มีประโยชน์ที่สุดสำหรับเซลล์ประสาทในการแก้ปัญหาโดยเฉพาะเนื่องจากน้ำหนักมักจะกระตุ้นหรือยับยั้งสัญญาณที่กำลังสื่อสาร เซลล์ประสาทแต่ละเซลล์มีสถานะภายในซึ่งเรียกว่าสัญญาณกระตุ้น สัญญาณเอาท์พุตซึ่งสร้างขึ้นหลังจากรวมสัญญาณอินพุตและกฎการเปิดใช้งานอาจถูกส่งไปยังหน่วยอื่น
ประวัติย่อของ ANN
ประวัติของ ANN สามารถแบ่งออกเป็นสามยุคดังต่อไปนี้ -
ANN ในช่วงทศวรรษที่ 1940 ถึง 1960
พัฒนาการที่สำคัญบางประการในยุคนี้มีดังนี้ -
1943 - มีการสันนิษฐานว่าแนวคิดของโครงข่ายประสาทเทียมเริ่มต้นจากการทำงานของนักสรีรวิทยาวอร์เรนแมคคัลล็อกและนักคณิตศาสตร์วอลเตอร์พิตส์เมื่อในปีพ. ศ. 2486 พวกเขาได้สร้างแบบจำลองเครือข่ายประสาทที่เรียบง่ายโดยใช้วงจรไฟฟ้าเพื่ออธิบายว่าเซลล์ประสาทในสมองอาจทำงานได้อย่างไร .
1949- หนังสือของโดนัลด์เฮบบ์เรื่องThe Organization of Behaviorกล่าวถึงความจริงที่ว่าการกระตุ้นเซลล์ประสาทหนึ่งซ้ำ ๆ โดยอีกเซลล์หนึ่งจะเพิ่มความแข็งแรงทุกครั้งที่ใช้
1956 - เครือข่ายหน่วยความจำเชื่อมโยงได้รับการแนะนำโดย Taylor
1958 - วิธีการเรียนรู้สำหรับแบบจำลองเซลล์ประสาท McCulloch และ Pitts ชื่อ Perceptron ถูกคิดค้นโดย Rosenblatt
1960 - Bernard Widrow และ Marcian Hoff พัฒนาโมเดลที่เรียกว่า "ADALINE" และ "MADALINE"
ANN ในช่วงปี 1960 ถึง 1980
พัฒนาการที่สำคัญบางประการในยุคนี้มีดังนี้ -
1961 - Rosenblatt ทำไม่สำเร็จ แต่เสนอโครงการ "backpropagation" สำหรับเครือข่ายหลายชั้น
1964 - เทย์เลอร์สร้างวงจรผู้ชนะ - รับทั้งหมดโดยมีการยับยั้งระหว่างหน่วยเอาต์พุต
1969 - Multilayer perceptron (MLP) ถูกคิดค้นโดย Minsky และ Papert
1971 - Kohonen พัฒนาความทรงจำ Associative
1976 - Stephen Grossberg และ Gail Carpenter ได้พัฒนาทฤษฎี Adaptive resonance
ANN ตั้งแต่ปี 1980 จนถึงปัจจุบัน
พัฒนาการที่สำคัญบางประการในยุคนี้มีดังนี้ -
1982 - การพัฒนาที่สำคัญคือแนวทางด้านพลังงานของ Hopfield
1985 - เครื่อง Boltzmann ได้รับการพัฒนาโดย Ackley, Hinton และ Sejnowski
1986 - Rumelhart, Hinton และ Williams แนะนำ Generalized Delta Rule
1988 - Kosko พัฒนา Binary Associative Memory (BAM) และยังให้แนวคิดเรื่อง Fuzzy Logic ใน ANN
การทบทวนในอดีตแสดงให้เห็นว่ามีความคืบหน้าอย่างมีนัยสำคัญในสาขานี้ ชิปบนเครือข่ายประสาทเทียมกำลังเกิดขึ้นและมีการพัฒนาแอปพลิเคชันสำหรับปัญหาที่ซับซ้อน แน่นอนว่าวันนี้เป็นช่วงแห่งการเปลี่ยนแปลงของเทคโนโลยีเครือข่ายประสาทเทียม
เซลล์ประสาททางชีวภาพ
เซลล์ประสาท (neuron) เป็นเซลล์ทางชีววิทยาพิเศษที่ประมวลผลข้อมูล ตามการประมาณค่าที่มีจำนวนมากของเซลล์ประสาทประมาณ 10 11ที่มีการเชื่อมโยงหลายประมาณ 10 15
แผนภาพ
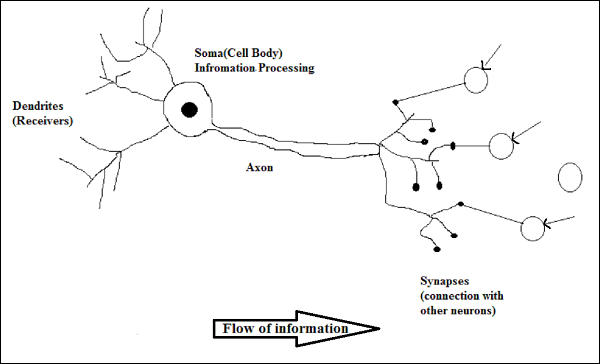
การทำงานของเซลล์ประสาททางชีวภาพ
ดังที่แสดงในแผนภาพด้านบนเซลล์ประสาททั่วไปประกอบด้วยสี่ส่วนต่อไปนี้ด้วยความช่วยเหลือซึ่งเราสามารถอธิบายการทำงานของมันได้ -
Dendrites- เป็นกิ่งไม้คล้ายต้นไม้มีหน้าที่รับข้อมูลจากเซลล์ประสาทอื่นที่เชื่อมต่ออยู่ ในอีกแง่หนึ่งเราสามารถพูดได้ว่าพวกมันเป็นเหมือนหูของเซลล์ประสาท
Soma - เป็นเซลล์ร่างกายของเซลล์ประสาทและมีหน้าที่ในการประมวลผลข้อมูลที่ได้รับจากเดนไดรต์
Axon - มันเหมือนกับสายเคเบิลที่เซลล์ประสาทส่งข้อมูล
Synapses - เป็นการเชื่อมต่อระหว่างแอกซอนและเดนไดรต์เซลล์ประสาทอื่น ๆ
ANN เทียบกับ BNN
ก่อนที่จะดูความแตกต่างระหว่าง Artificial Neural Network (ANN) และ Biological Neural Network (BNN) เรามาดูความคล้ายคลึงกันตามคำศัพท์ระหว่างสองสิ่งนี้
| โครงข่ายประสาทชีวภาพ (BNN) | โครงข่ายประสาทเทียม (ANN) |
|---|---|
| โซมะ | โหนด |
| เดนไดรต์ | อินพุต |
| ไซแนปส์ | น้ำหนักหรือการเชื่อมต่อระหว่างกัน |
| แอกซอน | เอาต์พุต |
ตารางต่อไปนี้แสดงการเปรียบเทียบระหว่าง ANN และ BNN ตามเกณฑ์บางประการที่กล่าวถึง
| เกณฑ์ | บีเอ็น | ANN |
|---|---|---|
| Processing | ขนานใหญ่ช้า แต่เหนือกว่า ANN | ขนานใหญ่เร็ว แต่ด้อยกว่า BNN |
| Size | 10 11เซลล์ประสาทและ 10 15 การเชื่อมต่อระหว่างกัน | 10 2ถึง 10 4โหนด (ส่วนใหญ่ขึ้นอยู่กับประเภทของแอปพลิเคชันและผู้ออกแบบเครือข่าย) |
| Learning | พวกเขาสามารถทนต่อความคลุมเครือ | ข้อมูลที่มีโครงสร้างและการจัดรูปแบบที่แม่นยำมากจำเป็นต้องทนต่อความคลุมเครือ |
| Fault tolerance | ประสิทธิภาพลดลงแม้กระทั่งความเสียหายบางส่วน | มีความสามารถในการทำงานที่แข็งแกร่งดังนั้นจึงมีศักยภาพที่จะทนต่อความผิดพลาดได้ |
| Storage capacity | เก็บข้อมูลในไซแนปส์ | เก็บข้อมูลในตำแหน่งหน่วยความจำต่อเนื่อง |
แบบจำลองโครงข่ายประสาทเทียม
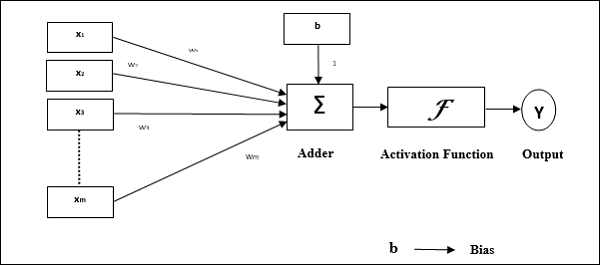
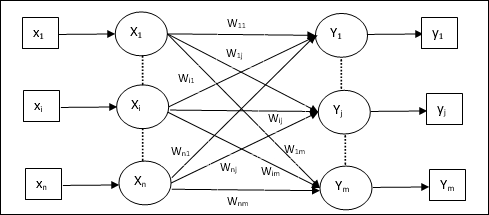
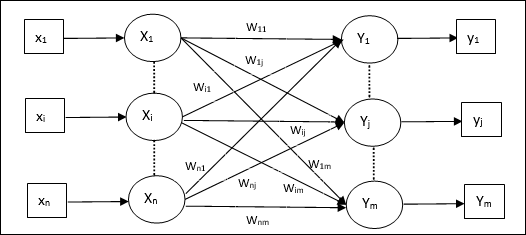
แผนภาพต่อไปนี้แสดงถึงโมเดลทั่วไปของ ANN ตามด้วยการประมวลผล
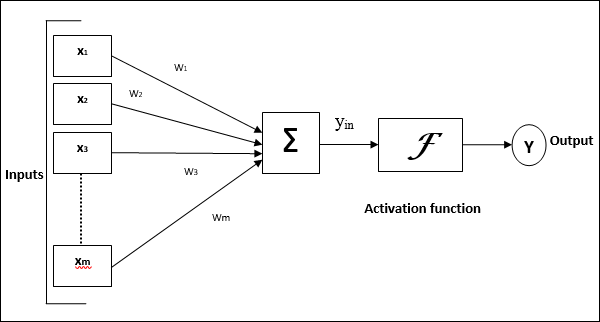
สำหรับแบบจำลองโครงข่ายประสาทเทียมทั่วไปข้างต้นสามารถคำนวณอินพุตสุทธิได้ดังนี้ -
$$ y_ {in} \: = \: x_ {1} .w_ {1} \: + \: x_ {2} .w_ {2} \: + \: x_ {3} .w_ {3} \: \ dotso \: x_ {m} .w_ {m} $$
กล่าวคืออินพุตสุทธิ $ y_ {in} \: = \: \ sum_i ^ m \: x_ {i} .w_ {i} $
ผลลัพธ์สามารถคำนวณได้โดยใช้ฟังก์ชันการเปิดใช้งานกับอินพุตสุทธิ
$$ Y \: = \: F (y_ {in}) $$
เอาท์พุท = ฟังก์ชัน (คำนวณอินพุตสุทธิ)
การประมวลผล ANN ขึ้นอยู่กับองค์ประกอบพื้นฐานสามประการต่อไปนี้ -
- โทโพโลยีเครือข่าย
- การปรับน้ำหนักหรือการเรียนรู้
- ฟังก์ชั่นการเปิดใช้งาน
ในบทนี้เราจะพูดถึงรายละเอียดเกี่ยวกับองค์ประกอบทั้งสามของ ANN
โทโพโลยีเครือข่าย
โทโพโลยีเครือข่ายคือการจัดเรียงเครือข่ายพร้อมกับโหนดและสายเชื่อมต่อ ตามโทโพโลยี ANN สามารถจัดเป็นประเภทต่อไปนี้ -
เครือข่าย Feedforward
เป็นเครือข่ายที่ไม่เกิดซ้ำที่มีหน่วยประมวลผล / โหนดในเลเยอร์และโหนดทั้งหมดในเลเยอร์เชื่อมต่อกับโหนดของเลเยอร์ก่อนหน้า การเชื่อมต่อมีน้ำหนักที่แตกต่างกัน ไม่มีลูปป้อนกลับหมายความว่าสัญญาณสามารถไหลไปในทิศทางเดียวเท่านั้นจากอินพุตไปยังเอาต์พุต อาจแบ่งออกเป็นสองประเภทดังต่อไปนี้ -
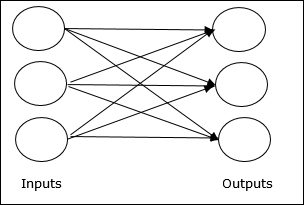
Single layer feedforward network- แนวคิดคือ ANN feedforward ที่มีเลเยอร์ถ่วงน้ำหนักเพียงชั้นเดียว กล่าวอีกนัยหนึ่งเราสามารถพูดได้ว่าเลเยอร์อินพุตเชื่อมต่อกับเลเยอร์เอาต์พุตอย่างสมบูรณ์
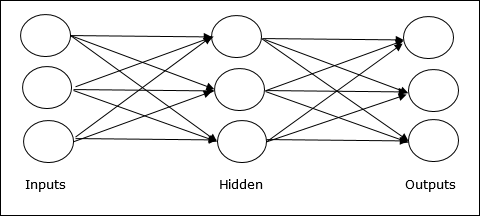
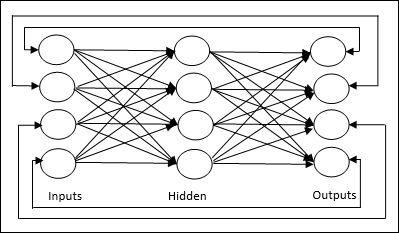
Multilayer feedforward network- แนวคิดคือ ANN feedforward ที่มีเลเยอร์ถ่วงน้ำหนักมากกว่าหนึ่งชั้น เนื่องจากเครือข่ายนี้มีเลเยอร์อย่างน้อยหนึ่งชั้นระหว่างอินพุตและเลเยอร์เอาต์พุตจึงเรียกว่าเลเยอร์ที่ซ่อนอยู่
เครือข่ายข้อเสนอแนะ
ตามชื่อที่แนะนำเครือข่ายป้อนกลับมีเส้นทางป้อนกลับซึ่งหมายความว่าสัญญาณสามารถไหลได้ทั้งสองทิศทางโดยใช้ลูป สิ่งนี้ทำให้เป็นระบบไดนามิกที่ไม่ใช่เชิงเส้นซึ่งเปลี่ยนแปลงไปเรื่อย ๆ จนกว่าจะเข้าสู่สภาวะสมดุล อาจแบ่งออกเป็นประเภทต่างๆดังต่อไปนี้ -
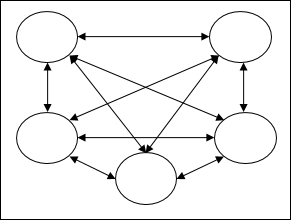
Recurrent networks- เป็นเครือข่ายข้อเสนอแนะที่มีลูปปิด ต่อไปนี้เป็นเครือข่ายที่เกิดซ้ำสองประเภท
Fully recurrent network - เป็นสถาปัตยกรรมเครือข่ายประสาทเทียมที่ง่ายที่สุดเนื่องจากโหนดทั้งหมดเชื่อมต่อกับโหนดอื่น ๆ ทั้งหมดและแต่ละโหนดทำงานเป็นทั้งอินพุตและเอาต์พุต
Jordan network - เป็นเครือข่ายวงปิดซึ่งเอาต์พุตจะไปที่อินพุตอีกครั้งเป็นข้อมูลป้อนกลับดังแสดงในแผนภาพต่อไปนี้
การปรับน้ำหนักหรือการเรียนรู้
การเรียนรู้ในโครงข่ายประสาทเทียมเป็นวิธีการปรับเปลี่ยนน้ำหนักของการเชื่อมต่อระหว่างเซลล์ประสาทของเครือข่ายที่ระบุ การเรียนรู้ใน ANN สามารถแบ่งออกเป็นสามประเภท ได้แก่ การเรียนรู้ภายใต้การดูแลการเรียนรู้ที่ไม่มีผู้ดูแลและการเรียนรู้แบบเสริมกำลัง
การเรียนรู้ภายใต้การดูแล
ตามชื่อการเรียนรู้ประเภทนี้ทำภายใต้การดูแลของครู กระบวนการเรียนรู้นี้ขึ้นอยู่กับ
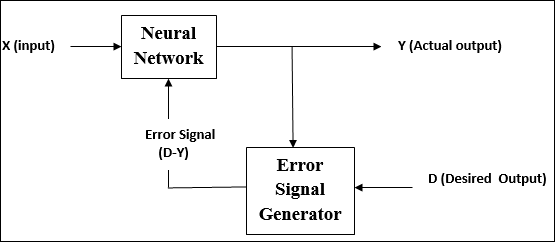
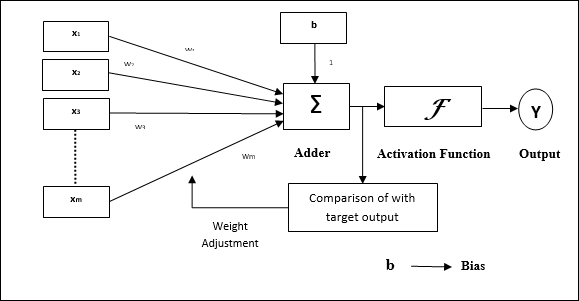
ในระหว่างการฝึกอบรม ANN ภายใต้การเรียนรู้ภายใต้การดูแลเวกเตอร์อินพุตจะถูกนำเสนอไปยังเครือข่ายซึ่งจะให้เวกเตอร์เอาต์พุต เวกเตอร์เอาต์พุตนี้เปรียบเทียบกับเวกเตอร์เอาต์พุตที่ต้องการ สัญญาณข้อผิดพลาดจะถูกสร้างขึ้นหากมีความแตกต่างระหว่างเอาต์พุตจริงและเวกเตอร์เอาต์พุตที่ต้องการ บนพื้นฐานของสัญญาณข้อผิดพลาดนี้น้ำหนักจะถูกปรับจนกว่าเอาต์พุตจริงจะตรงกับเอาต์พุตที่ต้องการ
การเรียนรู้ที่ไม่มีผู้ดูแล
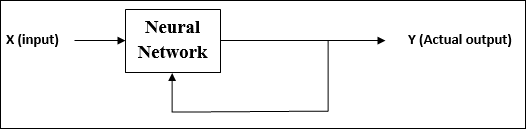
ตามชื่อการเรียนรู้ประเภทนี้ทำได้โดยไม่ต้องอยู่ภายใต้การดูแลของครู กระบวนการเรียนรู้นี้เป็นอิสระ
ในระหว่างการฝึกอบรม ANN ภายใต้การเรียนรู้ที่ไม่มีการดูแลจะรวมเวกเตอร์อินพุตประเภทที่คล้ายคลึงกันเพื่อสร้างคลัสเตอร์ เมื่อใช้รูปแบบการป้อนข้อมูลใหม่เครือข่ายประสาทจะให้การตอบสนองของเอาต์พุตที่ระบุคลาสที่เป็นรูปแบบการป้อนข้อมูล
ไม่มีข้อเสนอแนะจากสภาพแวดล้อมว่าอะไรควรเป็นผลลัพธ์ที่ต้องการและถูกต้องหรือไม่ถูกต้อง ดังนั้นในการเรียนรู้ประเภทนี้เครือข่ายจะต้องค้นพบรูปแบบและคุณสมบัติจากข้อมูลอินพุตและความสัมพันธ์ของข้อมูลอินพุตเหนือเอาต์พุต
การเรียนรู้เสริมแรง
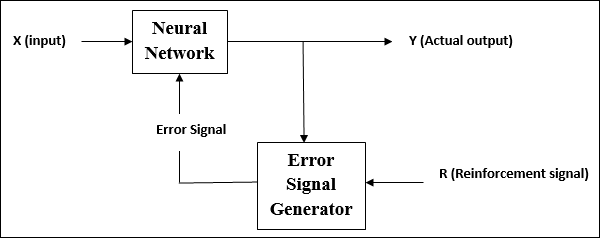
ตามชื่อที่แนะนำการเรียนรู้ประเภทนี้ใช้เพื่อเสริมสร้างหรือเสริมสร้างเครือข่ายผ่านข้อมูลนักวิจารณ์บางอย่าง กระบวนการเรียนรู้นี้คล้ายกับการเรียนรู้ภายใต้การดูแล แต่เราอาจมีข้อมูลน้อยมาก
ในระหว่างการฝึกอบรมเครือข่ายภายใต้การเรียนรู้แบบเสริมแรงเครือข่ายจะได้รับข้อเสนอแนะจากสิ่งแวดล้อม สิ่งนี้ทำให้คล้ายกับการเรียนรู้ภายใต้การดูแล อย่างไรก็ตามข้อเสนอแนะที่ได้รับที่นี่เป็นการประเมินที่ไม่ได้ให้คำแนะนำซึ่งหมายความว่าไม่มีครูในการเรียนรู้ภายใต้การดูแล หลังจากได้รับข้อเสนอแนะเครือข่ายจะทำการปรับน้ำหนักเพื่อรับข้อมูลนักวิจารณ์ที่ดีขึ้นในอนาคต
ฟังก์ชั่นการเปิดใช้งาน
อาจถูกกำหนดให้เป็นแรงพิเศษหรือความพยายามที่ใช้กับอินพุตเพื่อให้ได้เอาต์พุตที่แน่นอน ใน ANN เรายังสามารถใช้ฟังก์ชันการเปิดใช้งานกับอินพุตเพื่อให้ได้ผลลัพธ์ที่แน่นอน ต่อไปนี้เป็นฟังก์ชั่นการเปิดใช้งานที่น่าสนใจ -
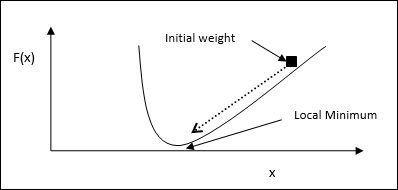
ฟังก์ชันการเปิดใช้งานเชิงเส้น
เรียกอีกอย่างว่าฟังก์ชันเอกลักษณ์เนื่องจากไม่มีการแก้ไขอินพุต สามารถกำหนดเป็น -
$$ F (x) \: = \: x $$
ฟังก์ชันการเปิดใช้งาน Sigmoid
มีสองประเภทดังนี้ -
Binary sigmoidal function- ฟังก์ชันการเปิดใช้งานนี้ทำการแก้ไขอินพุตระหว่าง 0 ถึง 1 ซึ่งเป็นค่าบวก มีขอบเขตเสมอซึ่งหมายความว่าเอาต์พุตต้องไม่น้อยกว่า 0 และมากกว่า 1 นอกจากนี้ยังเพิ่มขึ้นอย่างเคร่งครัดตามธรรมชาติซึ่งหมายความว่าอินพุตที่สูงขึ้นจะเป็นเอาต์พุต สามารถกำหนดเป็น
$$ F (x) \: = \: sigm (x) \: = \: \ frac {1} {1 \: + \: exp (-x)} $$
Bipolar sigmoidal function- ฟังก์ชันการเปิดใช้งานนี้ทำการแก้ไขอินพุตระหว่าง -1 ถึง 1 ซึ่งอาจเป็นค่าบวกหรือลบก็ได้ มีขอบเขตเสมอซึ่งหมายความว่าเอาต์พุตต้องไม่น้อยกว่า -1 และมากกว่า 1 นอกจากนี้ยังเพิ่มขึ้นอย่างเคร่งครัดในลักษณะเช่นฟังก์ชัน sigmoid สามารถกำหนดเป็น
$$ F (x) \: = \: sigm (x) \: = \: \ frac {2} {1 \: + \: exp (-x)} \: - \: 1 \: = \: \ frac {1 \: - \: exp (x)} {1 \: + \: exp (x)} $$
ดังที่ระบุไว้ก่อนหน้านี้ ANN ได้รับแรงบันดาลใจอย่างสมบูรณ์จากระบบประสาททางชีววิทยานั่นคือสมองของมนุษย์ทำงาน ลักษณะที่น่าประทับใจที่สุดของสมองมนุษย์คือการเรียนรู้ด้วยเหตุนี้ ANN จึงได้มาซึ่งคุณลักษณะเดียวกัน
การเรียนรู้ใน ANN คืออะไร?
โดยพื้นฐานแล้วการเรียนรู้หมายถึงการทำและปรับตัวให้เข้ากับการเปลี่ยนแปลงในตัวของมันเองและเมื่อมีการเปลี่ยนแปลงในสิ่งแวดล้อม ANN เป็นระบบที่ซับซ้อนหรือเราสามารถพูดได้อย่างชัดเจนว่าเป็นระบบปรับตัวที่ซับซ้อนซึ่งสามารถเปลี่ยนแปลงโครงสร้างภายในได้ตามข้อมูลที่ส่งผ่าน
ทำไมมันถึงสำคัญ?
การเป็นระบบการปรับตัวที่ซับซ้อนการเรียนรู้ใน ANN หมายความว่าหน่วยประมวลผลสามารถเปลี่ยนพฤติกรรมอินพุต / เอาต์พุตได้เนื่องจากการเปลี่ยนแปลงของสภาพแวดล้อม ความสำคัญของการเรียนรู้ใน ANN เพิ่มขึ้นเนื่องจากฟังก์ชันการเปิดใช้งานคงที่เช่นเดียวกับเวกเตอร์อินพุต / เอาต์พุตเมื่อสร้างเครือข่ายเฉพาะ ตอนนี้เพื่อเปลี่ยนพฤติกรรมอินพุต / เอาต์พุตเราจำเป็นต้องปรับน้ำหนัก
การจำแนกประเภท
อาจถูกกำหนดให้เป็นกระบวนการเรียนรู้เพื่อแยกแยะข้อมูลของกลุ่มตัวอย่างออกเป็นชั้นเรียนต่างๆโดยการค้นหาคุณลักษณะทั่วไประหว่างกลุ่มตัวอย่างในชั้นเรียนเดียวกัน ตัวอย่างเช่นในการฝึกอบรม ANN เรามีตัวอย่างการฝึกอบรมที่มีคุณสมบัติเฉพาะและในการทดสอบเรามีตัวอย่างการทดสอบที่มีคุณสมบัติเฉพาะอื่น ๆ การจัดหมวดหมู่เป็นตัวอย่างของการเรียนรู้ภายใต้การดูแล
กฎการเรียนรู้ของโครงข่ายประสาทเทียม
เรารู้ว่าในระหว่างการเรียนรู้ ANN ในการเปลี่ยนพฤติกรรมอินพุต / เอาต์พุตเราจำเป็นต้องปรับน้ำหนัก ดังนั้นจึงจำเป็นต้องใช้วิธีการที่สามารถแก้ไขน้ำหนักได้ วิธีการเหล่านี้เรียกว่ากฎการเรียนรู้ซึ่งเป็นเพียงอัลกอริทึมหรือสมการ ต่อไปนี้เป็นกฎการเรียนรู้บางประการสำหรับโครงข่ายประสาทเทียม -
กฎการเรียนรู้ Hebbian
กฎนี้หนึ่งในกฎที่เก่าแก่ที่สุดและง่ายที่สุดได้รับการแนะนำโดย Donald Hebb ในหนังสือของเขาThe Organization of Behaviorในปีพ. ศ. 2492 เป็นการเรียนรู้แบบป้อนไปข้างหน้าและไม่มีการดูแล
Basic Concept - กฎนี้เป็นไปตามข้อเสนอของ Hebb ผู้เขียน -
“ เมื่อแอกซอนของเซลล์ A อยู่ใกล้มากพอที่จะกระตุ้นเซลล์ B และมีส่วนร่วมในการยิงเซลล์ B ซ้ำ ๆ หรืออย่างต่อเนื่องกระบวนการเจริญเติบโตหรือการเปลี่ยนแปลงการเผาผลาญบางอย่างจะเกิดขึ้นในเซลล์เดียวหรือทั้งสองเซลล์เช่นประสิทธิภาพของ A ในขณะที่เซลล์ใดเซลล์หนึ่งยิง B เพิ่มขึ้น”
จากสมมติฐานข้างต้นเราสามารถสรุปได้ว่าการเชื่อมต่อระหว่างเซลล์ประสาทสองเซลล์อาจแข็งแรงขึ้นหากเซลล์ประสาททำงานในเวลาเดียวกันและอาจอ่อนแอลงหากพวกมันยิงในเวลาที่ต่างกัน
Mathematical Formulation - ตามกฎการเรียนรู้ของ Hebbian ต่อไปนี้เป็นสูตรในการเพิ่มน้ำหนักของการเชื่อมต่อในทุกขั้นตอน
$$ \ Delta w_ {ji} (t) \: = \: \ alpha x_ {i} (t) .y_ {j} (t) $$
ที่นี่ $ \ Delta w_ {ji} (t) $ = เพิ่มขึ้นโดยที่น้ำหนักของการเชื่อมต่อเพิ่มขึ้นในขั้นตอนเวลา t
$ \ alpha $ = อัตราการเรียนรู้เชิงบวกและคงที่
$ x_ {i} (t) $ = ค่าอินพุตจากเซลล์ประสาท pre-synaptic ในขั้นตอนเวลา t
$ y_ {i} (t) $ = ผลลัพธ์ของเซลล์ประสาท pre-synaptic ในขั้นตอนเดียวกัน t
กฎการเรียนรู้ของ Perceptron
กฎนี้เป็นข้อผิดพลาดในการแก้ไขอัลกอริธึมการเรียนรู้ภายใต้การดูแลของเครือข่ายฟีดฟอร์เวิร์ดชั้นเดียวที่มีฟังก์ชันการเปิดใช้งานเชิงเส้นซึ่งแนะนำโดย Rosenblatt
Basic Concept- ตามที่ได้รับการดูแลโดยธรรมชาติในการคำนวณข้อผิดพลาดจะมีการเปรียบเทียบระหว่างเอาต์พุตที่ต้องการ / เป้าหมายและเอาต์พุตจริง หากพบความแตกต่างจะต้องทำการเปลี่ยนแปลงน้ำหนักของการเชื่อมต่อ
Mathematical Formulation - เพื่ออธิบายการกำหนดทางคณิตศาสตร์สมมติว่าเรามีจำนวน 'n' ของเวกเตอร์อินพุต จำกัด x (n) พร้อมกับเวกเตอร์เอาต์พุตที่ต้องการ / เป้าหมาย t (n) โดยที่ n = 1 ถึง N
ตอนนี้สามารถคำนวณเอาต์พุต 'y' ได้ตามที่อธิบายไว้ก่อนหน้าบนพื้นฐานของอินพุตสุทธิและฟังก์ชันการเปิดใช้งานที่ใช้กับอินพุตสุทธินั้นสามารถแสดงได้ดังนี้ -
$$ y \: = \: f (y_ {in}) \: = \: \ begin {cases} 1, & y_ {in} \:> \: \ theta \\ 0, & y_ {in} \: \ leqslant \: \ theta \ end {cases} $$
ที่ไหน θ คือเกณฑ์
การอัปเดตน้ำหนักสามารถทำได้ในสองกรณีต่อไปนี้ -
Case I - เมื่อไหร่ t ≠ yแล้ว
$$ w (ใหม่) \: = \: w (เก่า) \: + \; tx $$
Case II - เมื่อไหร่ t = yแล้ว
ไม่มีการเปลี่ยนแปลงน้ำหนัก
กฎการเรียนรู้เดลต้า (กฎ Widrow-Hoff)
ได้รับการแนะนำโดย Bernard Widrow และ Marcian Hoff หรือที่เรียกว่าวิธี Least Mean Square (LMS) เพื่อลดข้อผิดพลาดในรูปแบบการฝึกอบรมทั้งหมด เป็นอัลกอริธึมการเรียนรู้ภายใต้การดูแลที่มีฟังก์ชันการเปิดใช้งานอย่างต่อเนื่อง
Basic Concept- พื้นฐานของกฎนี้คือแนวทางการไล่ระดับสีซึ่งจะดำเนินต่อไปตลอดกาล กฎเดลต้าจะอัปเดตน้ำหนักซิแนปติกเพื่อลดอินพุตสุทธิไปยังหน่วยเอาต์พุตและค่าเป้าหมาย
Mathematical Formulation - ในการอัปเดตน้ำหนัก synaptic กฎเดลต้าจะกำหนดโดย
$$ \ Delta w_ {i} \: = \: \ alpha \ :. x_ {i} .e_ {j} $$
ที่นี่ $ \ Delta w_ {i} $ = weight change for i th pattern;
$ \ alpha $ = อัตราการเรียนรู้เชิงบวกและคงที่
$ x_ {i} $ = ค่าอินพุตจากเซลล์ประสาท pre-synaptic;
$ e_ {j} $ = $ (t \: - \: y_ {in}) $ ความแตกต่างระหว่างผลลัพธ์ที่ต้องการ / เป้าหมายและผลลัพธ์จริง $ y_ {in} $
กฎเดลต้าข้างต้นมีไว้สำหรับหน่วยเอาต์พุตเดียวเท่านั้น
การอัปเดตน้ำหนักสามารถทำได้ในสองกรณีต่อไปนี้ -
Case-I - เมื่อไหร่ t ≠ yแล้ว
$$ w (ใหม่) \: = \: w (เก่า) \: + \: \ Delta w $$
Case-II - เมื่อไหร่ t = yแล้ว
ไม่มีการเปลี่ยนแปลงน้ำหนัก
กฎการเรียนรู้ที่แข่งขันได้ (ผู้ชนะจะได้ทั้งหมด)
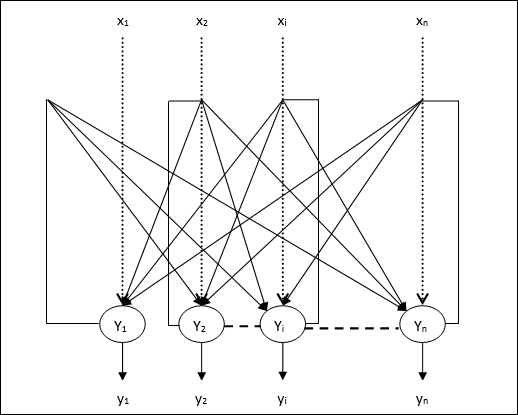
เกี่ยวข้องกับการฝึกอบรมที่ไม่มีผู้ดูแลซึ่งโหนดเอาต์พุตพยายามแข่งขันกันเพื่อแสดงรูปแบบการป้อนข้อมูล เพื่อให้เข้าใจกฎการเรียนรู้นี้เราต้องเข้าใจเครือข่ายการแข่งขันซึ่งได้รับดังต่อไปนี้ -
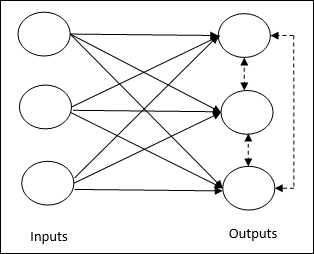
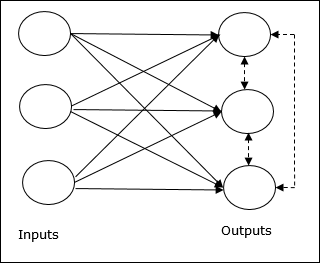
Basic Concept of Competitive Network- เครือข่ายนี้เหมือนกับเครือข่าย feedforward แบบชั้นเดียวที่มีการเชื่อมต่อข้อมูลป้อนกลับระหว่างเอาต์พุต การเชื่อมต่อระหว่างเอาท์พุทเป็นประเภทการยับยั้งซึ่งแสดงโดยเส้นประซึ่งหมายความว่าคู่แข่งไม่เคยสนับสนุนตัวเอง
Basic Concept of Competitive Learning Rule- ดังที่กล่าวไว้ก่อนหน้านี้จะมีการแข่งขันระหว่างโหนดเอาต์พุต ดังนั้นแนวคิดหลักคือในระหว่างการฝึกอบรมหน่วยเอาต์พุตที่มีการเปิดใช้งานสูงสุดตามรูปแบบอินพุตที่กำหนดจะได้รับการประกาศให้เป็นผู้ชนะ กฎนี้เรียกอีกอย่างว่า Winner-take-all เนื่องจากมีการอัปเดตเฉพาะเซลล์ประสาทที่ชนะเท่านั้นและเซลล์ประสาทที่เหลือจะไม่เปลี่ยนแปลง
Mathematical formulation - ต่อไปนี้เป็นปัจจัยสำคัญสามประการสำหรับการกำหนดทางคณิตศาสตร์ของกฎการเรียนรู้นี้ -
Condition to be a winner - สมมติว่าถ้าเซลล์ประสาท $ y_ {k} $ อยากเป็นผู้ชนะก็จะมีเงื่อนไขดังต่อไปนี้ -
$$ y_ {k} \: = \: \ begin {cases} 1 & if \: v_ {k} \:> \: v_ {j} \: for \: all \: j, \: j \: \ neq \: k \\ 0 & มิฉะนั้น \ end {cases} $$
หมายความว่าหากเซลล์ประสาทใด ๆ พูดว่า $ y_ {k} $ ต้องการที่จะชนะจากนั้นฟิลด์ท้องถิ่นที่เกิดขึ้น (ผลลัพธ์ของหน่วยการรวม) กล่าวว่า $ v_ {k} $ จะต้องมีขนาดใหญ่ที่สุดในบรรดาเซลล์ประสาทอื่น ๆ ทั้งหมด ในเครือข่าย
Condition of sum total of weight - ข้อ จำกัด อีกประการหนึ่งของกฎการเรียนรู้เชิงแข่งขันคือผลรวมของน้ำหนักของเซลล์ประสาทขาออกเฉพาะจะเป็น 1 ตัวอย่างเช่นถ้าเราพิจารณาเซลล์ประสาท k แล้ว -
$$ \ displaystyle \ sum \ LIMIT_ {j} w_ {kj} \: = \: 1 \: \: \: \: \: \: \: \: \: สำหรับ \: ทั้งหมด \: k $$
Change of weight for winner- หากเซลล์ประสาทไม่ตอบสนองต่อรูปแบบการป้อนข้อมูลจะไม่มีการเรียนรู้เกิดขึ้นในเซลล์ประสาทนั้น อย่างไรก็ตามหากเซลล์ประสาทตัวใดตัวหนึ่งชนะน้ำหนักที่เกี่ยวข้องจะถูกปรับดังต่อไปนี้
$$ \ Delta w_ {kj} \: = \: \ begin {cases} - \ alpha (x_ {j} \: - \: w_ {kj}), & if \: neuron \: k \: wins \\ 0, & if \: neuron \: k \: Loss \ end {cases} $$
ที่นี่ $ \ alpha $ คืออัตราการเรียนรู้
สิ่งนี้แสดงให้เห็นอย่างชัดเจนว่าเรากำลังนิยมเซลล์ประสาทที่ชนะโดยการปรับน้ำหนักของมันและหากมีการสูญเสียเซลล์ประสาทเราก็ไม่จำเป็นต้องปรับน้ำหนักของมันใหม่
กฎการเรียนรู้ของ Outstar
กฎนี้นำเสนอโดย Grossberg เกี่ยวข้องกับการเรียนรู้ภายใต้การดูแลเนื่องจากทราบผลลัพธ์ที่ต้องการ เรียกอีกอย่างว่า Grossberg learning
Basic Concept- กฎนี้ใช้กับเซลล์ประสาทที่เรียงเป็นชั้น ๆ ได้รับการออกแบบมาเป็นพิเศษเพื่อให้ได้ผลลัพธ์ที่ต้องการd ของเลเยอร์ของ p เซลล์ประสาท.
Mathematical Formulation - การปรับน้ำหนักในกฎนี้คำนวณได้ดังนี้
$$ \ Delta w_ {j} \: = \: \ alpha \ :( d \: - \: w_ {j}) $$
ที่นี่ d คือผลลัพธ์ของเซลล์ประสาทที่ต้องการและ $ \ alpha $ คืออัตราการเรียนรู้
ตามชื่อ supervised learningเกิดขึ้นภายใต้การดูแลของครู กระบวนการเรียนรู้นี้ขึ้นอยู่กับ ในระหว่างการฝึก ANN ภายใต้การเรียนรู้ภายใต้การดูแลเวกเตอร์อินพุตจะถูกนำเสนอไปยังเครือข่ายซึ่งจะสร้างเวกเตอร์เอาต์พุต เวกเตอร์เอาต์พุตนี้เปรียบเทียบกับเวกเตอร์เอาต์พุตที่ต้องการ / เป้าหมาย สัญญาณข้อผิดพลาดจะถูกสร้างขึ้นหากมีความแตกต่างระหว่างเอาต์พุตจริงและเวกเตอร์เอาต์พุตที่ต้องการ / เป้าหมาย บนพื้นฐานของสัญญาณข้อผิดพลาดนี้น้ำหนักจะถูกปรับจนกว่าเอาต์พุตจริงจะตรงกับเอาต์พุตที่ต้องการ
เพอร์เซปตรอน
พัฒนาโดย Frank Rosenblatt โดยใช้แบบจำลอง McCulloch และ Pitts perceptron เป็นหน่วยปฏิบัติการพื้นฐานของโครงข่ายประสาทเทียม ใช้กฎการเรียนรู้ภายใต้การดูแลและสามารถจำแนกข้อมูลออกเป็นสองชั้น
ลักษณะการทำงานของเพอร์เซปตรอน: ประกอบด้วยเซลล์ประสาทเดียวที่มีจำนวนอินพุตตามอำเภอใจพร้อมกับน้ำหนักที่ปรับได้ แต่เอาต์พุตของเซลล์ประสาทคือ 1 หรือ 0 ขึ้นอยู่กับเกณฑ์ นอกจากนี้ยังประกอบด้วยอคติที่มีน้ำหนักเสมอ 1 รูปต่อไปนี้ให้การแสดงแผนผังของเพอร์เซปตรอน
Perceptron จึงมีองค์ประกอบพื้นฐานสามประการดังต่อไปนี้ -
Links - มันจะมีชุดของลิงค์การเชื่อมต่อซึ่งมีน้ำหนักรวมถึงอคติที่มีน้ำหนักเสมอ 1
Adder - เพิ่มอินพุตหลังจากคูณด้วยน้ำหนักตามลำดับ
Activation function- มัน จำกัด การส่งออกของเซลล์ประสาท ฟังก์ชันการเปิดใช้งานขั้นพื้นฐานที่สุดคือฟังก์ชันขั้นตอน Heaviside ที่มีเอาต์พุตที่เป็นไปได้สองแบบ ฟังก์ชันนี้จะคืนค่า 1 หากอินพุตเป็นบวกและ 0 สำหรับอินพุตเชิงลบใด ๆ
อัลกอริทึมการฝึกอบรม
สามารถฝึกเครือข่าย Perceptron สำหรับยูนิตเอาต์พุตเดี่ยวและยูนิตเอาต์พุตหลายยูนิต
อัลกอริทึมการฝึกอบรมสำหรับหน่วยเอาต์พุตเดี่ยว
Step 1 - เริ่มต้นสิ่งต่อไปนี้เพื่อเริ่มการฝึกอบรม -
- Weights
- Bias
- อัตราการเรียนรู้ $ \ alpha $
เพื่อการคำนวณที่ง่ายและเรียบง่ายต้องกำหนดน้ำหนักและอคติให้เท่ากับ 0 และต้องกำหนดอัตราการเรียนรู้ให้เท่ากับ 1
Step 2 - ทำตามขั้นตอนที่ 3-8 ต่อเมื่อเงื่อนไขการหยุดไม่เป็นจริง
Step 3 - ทำต่อขั้นตอนที่ 4-6 สำหรับเวกเตอร์การฝึกทุกตัว x.
Step 4 - เปิดใช้งานหน่วยอินพุตแต่ละหน่วยดังนี้ -
$$ x_ {i} \: = \: s_ {i} \ :( i \: = \: 1 \: ถึง \: n) $$
Step 5 - ตอนนี้รับอินพุตสุทธิด้วยความสัมพันธ์ต่อไปนี้ -
$$ y_ {in} \: = \: b \: + \: \ displaystyle \ sum \ LIMIT_ {i} ^ n x_ {i}. \: w_ {i} $$
ที่นี่ ‘b’ เป็นอคติและ ‘n’ คือจำนวนเซลล์ประสาทอินพุตทั้งหมด
Step 6 - ใช้ฟังก์ชันการเปิดใช้งานต่อไปนี้เพื่อรับผลลัพธ์สุดท้าย
$$ f (y_ {in}) \: = \: \ begin {cases} 1 & if \: y_ {in} \:> \: \ theta \\ 0 & if \: - \ theta \: \ leqslant \ : y_ {in} \: \ leqslant \: \ theta \\ - 1 & if \: y_ {in} \: <\: - \ theta \ end {cases} $$
Step 7 - ปรับน้ำหนักและอคติดังนี้ -
Case 1 - ถ้า y ≠ t จากนั้น
$$ w_ {i} (ใหม่) \: = \: w_ {i} (เก่า) \: + \: \ alpha \: tx_ {i} $$
$$ b (ใหม่) \: = \: b (เก่า) \: + \: \ alpha t $$
Case 2 - ถ้า y = t จากนั้น
$$ w_ {i} (ใหม่) \: = \: w_ {i} (เก่า) $$
$$ b (ใหม่) \: = \: b (เก่า) $$
ที่นี่ ‘y’ คือผลลัพธ์จริงและ ‘t’ คือผลลัพธ์ที่ต้องการ / เป้าหมาย
Step 8 - ทดสอบสภาพการหยุดซึ่งจะเกิดขึ้นเมื่อไม่มีการเปลี่ยนแปลงของน้ำหนัก
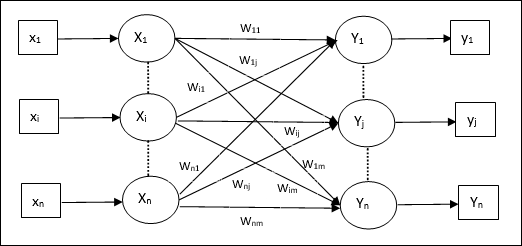
อัลกอริทึมการฝึกอบรมสำหรับหน่วยเอาต์พุตหลายหน่วย
แผนภาพต่อไปนี้เป็นสถาปัตยกรรมของ perceptron สำหรับเอาต์พุตหลายคลาส
Step 1 - เริ่มต้นสิ่งต่อไปนี้เพื่อเริ่มการฝึกอบรม -
- Weights
- Bias
- อัตราการเรียนรู้ $ \ alpha $
เพื่อการคำนวณที่ง่ายและเรียบง่ายต้องกำหนดน้ำหนักและอคติให้เท่ากับ 0 และต้องกำหนดอัตราการเรียนรู้ให้เท่ากับ 1
Step 2 - ทำตามขั้นตอนที่ 3-8 ต่อเมื่อเงื่อนไขการหยุดไม่เป็นจริง
Step 3 - ทำต่อขั้นตอนที่ 4-6 สำหรับเวกเตอร์การฝึกทุกตัว x.
Step 4 - เปิดใช้งานหน่วยอินพุตแต่ละหน่วยดังนี้ -
$$ x_ {i} \: = \: s_ {i} \ :( i \: = \: 1 \: ถึง \: n) $$
Step 5 - รับอินพุตสุทธิด้วยความสัมพันธ์ต่อไปนี้ -
$$ y_ {in} \: = \: b \: + \: \ displaystyle \ sum \ LIMIT_ {i} ^ n x_ {i} \: w_ {ij} $$
ที่นี่ ‘b’ เป็นอคติและ ‘n’ คือจำนวนเซลล์ประสาทอินพุตทั้งหมด
Step 6 - ใช้ฟังก์ชันการเปิดใช้งานต่อไปนี้เพื่อรับเอาต์พุตสุดท้ายสำหรับเอาต์พุตแต่ละยูนิต j = 1 to m -
$$ f (y_ {in}) \: = \: \ begin {cases} 1 & if \: y_ {อันตราย} \:> \: \ theta \\ 0 & if \: - \ theta \: \ leqslant \ : y_ {อันตราย} \: \ leqslant \: \ theta \\ - 1 & if \: y_ {อันตราย} \: <\: - \ theta \ end {cases} $$
Step 7 - ปรับน้ำหนักและอคติสำหรับ x = 1 to n และ j = 1 to m ดังต่อไปนี้ -
Case 1 - ถ้า yj ≠ tj จากนั้น
$$ w_ {ij} (ใหม่) \: = \: w_ {ij} (เก่า) \: + \: \ alpha \: t_ {j} x_ {i} $$
$$ b_ {j} (ใหม่) \: = \: b_ {j} (เก่า) \: + \: \ alpha t_ {j} $$
Case 2 - ถ้า yj = tj จากนั้น
$$ w_ {ij} (ใหม่) \: = \: w_ {ij} (เก่า) $$
$$ b_ {j} (ใหม่) \: = \: b_ {j} (เก่า) $$
ที่นี่ ‘y’ คือผลลัพธ์จริงและ ‘t’ คือผลลัพธ์ที่ต้องการ / เป้าหมาย
Step 8 - ทดสอบสภาพการหยุดซึ่งจะเกิดขึ้นเมื่อไม่มีการเปลี่ยนแปลงของน้ำหนัก
เซลล์ประสาทเชิงเส้นปรับตัว (Adaline)
Adaline ซึ่งย่อมาจาก Adaptive Linear Neuron คือเครือข่ายที่มีหน่วยเชิงเส้นเดียว ได้รับการพัฒนาโดย Widrow and Hoff ในปี 1960 จุดสำคัญบางประการเกี่ยวกับ Adaline มีดังนี้ -
ใช้ฟังก์ชันการเปิดใช้งานสองขั้ว
ใช้กฎเดลต้าสำหรับการฝึกอบรมเพื่อลดข้อผิดพลาด Mean-Squared Error (MSE) ระหว่างเอาต์พุตจริงและเอาต์พุตที่ต้องการ / เป้าหมาย
น้ำหนักและอคติสามารถปรับได้
สถาปัตยกรรม
โครงสร้างพื้นฐานของ Adaline นั้นคล้ายกับ perceptron ที่มีลูปข้อเสนอแนะพิเศษซึ่งจะเปรียบเทียบผลลัพธ์จริงกับเอาต์พุตที่ต้องการ / เป้าหมาย หลังจากเปรียบเทียบบนพื้นฐานของอัลกอริทึมการฝึกแล้วน้ำหนักและอคติจะได้รับการอัปเดต
อัลกอริทึมการฝึกอบรม
Step 1 - เริ่มต้นสิ่งต่อไปนี้เพื่อเริ่มการฝึกอบรม -
- Weights
- Bias
- อัตราการเรียนรู้ $ \ alpha $
เพื่อการคำนวณที่ง่ายและเรียบง่ายต้องกำหนดน้ำหนักและอคติให้เท่ากับ 0 และต้องกำหนดอัตราการเรียนรู้ให้เท่ากับ 1
Step 2 - ทำตามขั้นตอนที่ 3-8 ต่อเมื่อเงื่อนไขการหยุดไม่เป็นจริง
Step 3 - ทำขั้นตอนที่ 4-6 ต่อสำหรับคู่ฝึกไบโพลาร์ทุกคู่ s:t.
Step 4 - เปิดใช้งานหน่วยอินพุตแต่ละหน่วยดังนี้ -
$$ x_ {i} \: = \: s_ {i} \ :( i \: = \: 1 \: ถึง \: n) $$
Step 5 - รับอินพุตสุทธิด้วยความสัมพันธ์ต่อไปนี้ -
$$ y_ {in} \: = \: b \: + \: \ displaystyle \ sum \ LIMIT_ {i} ^ n x_ {i} \: w_ {i} $$
ที่นี่ ‘b’ เป็นอคติและ ‘n’ คือจำนวนเซลล์ประสาทอินพุตทั้งหมด
Step 6 - ใช้ฟังก์ชันการเปิดใช้งานต่อไปนี้เพื่อรับผลลัพธ์สุดท้าย -
$$ f (y_ {in}) \: = \: \ begin {cases} 1 & if \: y_ {in} \: \ geqslant \: 0 \\ - 1 & if \: y_ {in} \: < \: 0 \ end {cases} $$
Step 7 - ปรับน้ำหนักและอคติดังนี้ -
Case 1 - ถ้า y ≠ t จากนั้น
$$ w_ {i} (ใหม่) \: = \: w_ {i} (เก่า) \: + \: \ alpha (t \: - \: y_ {in}) x_ {i} $$
$$ b (ใหม่) \: = \: b (เก่า) \: + \: \ alpha (t \: - \: y_ {in}) $$
Case 2 - ถ้า y = t จากนั้น
$$ w_ {i} (ใหม่) \: = \: w_ {i} (เก่า) $$
$$ b (ใหม่) \: = \: b (เก่า) $$
ที่นี่ ‘y’ คือผลลัพธ์จริงและ ‘t’ คือผลลัพธ์ที่ต้องการ / เป้าหมาย
$ (t \: - \; y_ {in}) $ คือข้อผิดพลาดในการคำนวณ
Step 8 - ทดสอบสภาพการหยุดซึ่งจะเกิดขึ้นเมื่อไม่มีการเปลี่ยนแปลงของน้ำหนักหรือการเปลี่ยนแปลงของน้ำหนักสูงสุดที่เกิดขึ้นระหว่างการฝึกซ้อมมีค่าน้อยกว่าค่าเผื่อที่กำหนด
เซลล์ประสาทเชิงเส้นปรับตัวหลายตัว (Madaline)
Madaline ซึ่งย่อมาจาก Multiple Adaptive Linear Neuron เป็นเครือข่ายที่ประกอบด้วย Adalines จำนวนมากควบคู่กัน มันจะมีหน่วยเอาท์พุตเดียว ประเด็นสำคัญบางประการเกี่ยวกับ Madaline มีดังนี้ -
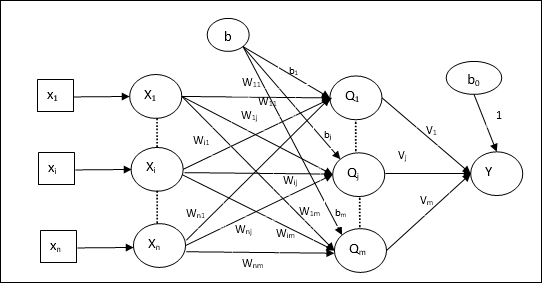
มันเหมือนกับ Perceptron หลายชั้นโดยที่ Adaline จะทำหน้าที่เป็นหน่วยที่ซ่อนอยู่ระหว่างอินพุตและเลเยอร์ Madaline
น้ำหนักและความลำเอียงระหว่างชั้นอินพุตและชั้นอะดาไลน์ตามที่เราเห็นในสถาปัตยกรรม Adaline สามารถปรับได้
ชั้น Adaline และ Madaline มีน้ำหนักและอคติคงที่เท่ากับ 1
การฝึกอบรมสามารถทำได้ด้วยความช่วยเหลือของกฎเดลต้า
สถาปัตยกรรม
สถาปัตยกรรมของ Madaline ประกอบด้วย “n” เซลล์ประสาทของชั้นอินพุต “m”เซลล์ประสาทของชั้น Adaline และ 1 เซลล์ประสาทของชั้น Madaline ชั้น Adaline ถือได้ว่าเป็นชั้นที่ซ่อนอยู่เนื่องจากอยู่ระหว่างชั้นอินพุตและชั้นเอาต์พุตนั่นคือชั้น Madaline
อัลกอริทึมการฝึกอบรม
ถึงตอนนี้เรารู้แล้วว่าต้องปรับเฉพาะน้ำหนักและอคติระหว่างชั้นอินพุตและชั้นอะดาลีนและน้ำหนักและอคติระหว่างชั้นอะดาลีนและชั้นมาดาไลน์ได้รับการแก้ไข
Step 1 - เริ่มต้นสิ่งต่อไปนี้เพื่อเริ่มการฝึกอบรม -
- Weights
- Bias
- อัตราการเรียนรู้ $ \ alpha $
เพื่อการคำนวณที่ง่ายและเรียบง่ายต้องกำหนดน้ำหนักและอคติให้เท่ากับ 0 และต้องกำหนดอัตราการเรียนรู้ให้เท่ากับ 1
Step 2 - ทำตามขั้นตอนที่ 3-8 ต่อเมื่อเงื่อนไขการหยุดไม่เป็นจริง
Step 3 - ทำขั้นตอนที่ 4-6 ต่อสำหรับคู่ฝึกไบโพลาร์ทุกคู่ s:t.
Step 4 - เปิดใช้งานหน่วยอินพุตแต่ละหน่วยดังนี้ -
$$ x_ {i} \: = \: s_ {i} \ :( i \: = \: 1 \: ถึง \: n) $$
Step 5 - รับอินพุตสุทธิในแต่ละชั้นที่ซ่อนอยู่นั่นคือชั้น Adaline ที่มีความสัมพันธ์ดังต่อไปนี้ -
$$ Q_ {อันตราย} \: = \: b_ {j} \: + \: \ displaystyle \ sum \ LIMIT_ {i} ^ n x_ {i} \: w_ {ij} \: \: \: j \: = \: 1 \: ถึง \: m $$
ที่นี่ ‘b’ เป็นอคติและ ‘n’ คือจำนวนเซลล์ประสาทอินพุตทั้งหมด
Step 6 - ใช้ฟังก์ชันการเปิดใช้งานต่อไปนี้เพื่อให้ได้ผลลัพธ์สุดท้ายที่ชั้น Adaline และชั้น Madaline -
$$ f (x) \: = \: \ begin {cases} 1 & if \: x \: \ geqslant \: 0 \\ - 1 & if \: x \: <\: 0 \ end {cases} $ $
เอาท์พุทที่หน่วย (Adaline) ที่ซ่อนอยู่
$$ Q_ {j} \: = \: f (Q_ {อันตราย}) $$
ผลลัพธ์สุดท้ายของเครือข่าย
$$ y \: = \: f (y_ {in}) $$
i.e. $ \: \: y_ {อันตราย} \: = \: b_ {0} \: + \: \ sum_ {j = 1} ^ m \: Q_ {j} \: v_ {j} $
Step 7 - คำนวณข้อผิดพลาดและปรับน้ำหนักดังนี้ -
Case 1 - ถ้า y ≠ t และ t = 1 จากนั้น
$$ w_ {ij} (ใหม่) \: = \: w_ {ij} (เก่า) \: + \: \ alpha (1 \: - \: Q_ {อันตราย}) x_ {i} $$
$$ b_ {j} (ใหม่) \: = \: b_ {j} (เก่า) \: + \: \ alpha (1 \: - \: Q_ {อันตราย}) $$
ในกรณีนี้น้ำหนักจะได้รับการอัปเดตเมื่อ Qj โดยที่อินพุตสุทธิใกล้เคียงกับ 0 เนื่องจาก t = 1.
Case 2 - ถ้า y ≠ t และ t = -1 จากนั้น
$$ w_ {ik} (ใหม่) \: = \: w_ {ik} (เก่า) \: + \: \ alpha (-1 \: - \: Q_ {ink}) x_ {i} $$
$$ b_ {k} (ใหม่) \: = \: b_ {k} (เก่า) \: + \: \ alpha (-1 \: - \: Q_ {ink}) $$
ในกรณีนี้น้ำหนักจะได้รับการอัปเดตเมื่อ Qk โดยที่อินพุตสุทธิเป็นบวกเพราะ t = -1.
ที่นี่ ‘y’ คือผลลัพธ์จริงและ ‘t’ คือผลลัพธ์ที่ต้องการ / เป้าหมาย
Case 3 - ถ้า y = t แล้ว
น้ำหนักจะไม่มีการเปลี่ยนแปลง
Step 8 - ทดสอบสภาพการหยุดซึ่งจะเกิดขึ้นเมื่อไม่มีการเปลี่ยนแปลงของน้ำหนักหรือการเปลี่ยนแปลงของน้ำหนักสูงสุดที่เกิดขึ้นระหว่างการฝึกซ้อมมีค่าน้อยกว่าค่าเผื่อที่กำหนด
ย้อนกลับเครือข่ายประสาทการแพร่กระจาย
Back Propagation Neural (BPN) คือโครงข่ายประสาทเทียมหลายชั้นซึ่งประกอบด้วยชั้นอินพุตชั้นที่ซ่อนอยู่และเลเยอร์เอาต์พุตอย่างน้อยหนึ่งชั้น ตามชื่อของมันการเผยแพร่ย้อนกลับจะเกิดขึ้นในเครือข่ายนี้ ข้อผิดพลาดซึ่งคำนวณที่เลเยอร์เอาต์พุตโดยการเปรียบเทียบเอาต์พุตเป้าหมายและเอาต์พุตจริงจะถูกส่งกลับไปยังเลเยอร์อินพุต
สถาปัตยกรรม
ดังที่แสดงในแผนภาพสถาปัตยกรรมของ BPN มีสามชั้นที่เชื่อมต่อกันซึ่งมีน้ำหนักอยู่ เลเยอร์ที่ซ่อนอยู่และเลเยอร์เอาต์พุตยังมีอคติซึ่งมีน้ำหนักเท่ากับ 1 เสมอ ดังที่เห็นได้ชัดจากแผนภาพการทำงานของ BPN มีสองขั้นตอน เฟสหนึ่งส่งสัญญาณจากชั้นอินพุตไปยังชั้นเอาต์พุตและอีกเฟสกลับเผยแพร่ข้อผิดพลาดจากชั้นเอาต์พุตไปยังชั้นอินพุต

อัลกอริทึมการฝึกอบรม
สำหรับการฝึกอบรม BPN จะใช้ฟังก์ชันการเปิดใช้งานไบนารีซิกมอยด์ การฝึกอบรมของ BPN จะมีสามขั้นตอนดังต่อไปนี้
Phase 1 - ฟีดไปข้างหน้าเฟส
Phase 2 - กลับเผยแพร่ข้อผิดพลาด
Phase 3 - อัปเดตน้ำหนัก
ขั้นตอนทั้งหมดนี้จะสรุปได้ในอัลกอริทึมดังนี้
Step 1 - เริ่มต้นสิ่งต่อไปนี้เพื่อเริ่มการฝึกอบรม -
- Weights
- อัตราการเรียนรู้ $ \ alpha $
สำหรับการคำนวณที่ง่ายและเรียบง่ายให้ใช้ค่าสุ่มเล็ก ๆ
Step 2 - ทำต่อขั้นตอนที่ 3-11 เมื่อเงื่อนไขการหยุดไม่เป็นจริง
Step 3 - ทำขั้นตอนที่ 4-10 ต่อทุกคู่การฝึก
ขั้นตอนที่ 1
Step 4 - หน่วยอินพุตแต่ละหน่วยรับสัญญาณอินพุต xi และส่งไปยังหน่วยที่ซ่อนอยู่สำหรับทุกคน i = 1 to n
Step 5 - คำนวณอินพุตสุทธิที่หน่วยที่ซ่อนอยู่โดยใช้ความสัมพันธ์ต่อไปนี้ -
$$ Q_ {อันตราย} \: = \: b_ {0j} \: + \: \ sum_ {i = 1} ^ n x_ {i} v_ {ij} \: \: \: \: j \: = \ : 1 \: ถึง \: p $$
ที่นี่ b0j คืออคติของหน่วยที่ซ่อนอยู่ vij น้ำหนักอยู่ที่ j หน่วยของเลเยอร์ที่ซ่อนอยู่มาจาก i หน่วยของชั้นอินพุต
ตอนนี้คำนวณผลลัพธ์สุทธิโดยใช้ฟังก์ชันการเปิดใช้งานต่อไปนี้
$$ Q_ {j} \: = \: f (Q_ {อันตราย}) $$
ส่งสัญญาณเอาต์พุตเหล่านี้ของยูนิตเลเยอร์ที่ซ่อนอยู่ไปยังยูนิตเลเยอร์เอาต์พุต
Step 6 - คำนวณอินพุตสุทธิที่หน่วยชั้นเอาต์พุตโดยใช้ความสัมพันธ์ต่อไปนี้ -
$$ y_ {ink} \: = \: b_ {0k} \: + \: \ sum_ {j = 1} ^ p \: Q_ {j} \: w_ {jk} \: \: k \: = \ : 1 \: ถึง \: m $$
ที่นี่ b0k เป็นอคติของหน่วยเอาท์พุท wjk น้ำหนักอยู่ที่ k หน่วยของชั้นเอาต์พุตที่มาจาก j หน่วยของชั้นที่ซ่อนอยู่
คำนวณผลลัพธ์สุทธิโดยใช้ฟังก์ชันการเปิดใช้งานต่อไปนี้
$$ y_ {k} \: = \: f (y_ {ink}) $$
ระยะที่ 2
Step 7 - คำนวณระยะการแก้ไขข้อผิดพลาดให้สอดคล้องกับรูปแบบเป้าหมายที่ได้รับในแต่ละหน่วยเอาต์พุตดังนี้ -
$$ \ delta_ {k} \: = \ :( t_ {k} \: - \: y_ {k}) f ^ {'} (y_ {ink}) $$
บนพื้นฐานนี้ให้อัปเดตน้ำหนักและอคติดังนี้ -
$$ \ Delta v_ {jk} \: = \: \ alpha \ delta_ {k} \: Q_ {ij} $$
$$ \ Delta b_ {0k} \: = \: \ alpha \ delta_ {k} $$
จากนั้นส่ง $ \ delta_ {k} $ กลับไปที่เลเยอร์ที่ซ่อนอยู่
Step 8 - ตอนนี้แต่ละหน่วยที่ซ่อนอยู่จะเป็นผลรวมของอินพุตเดลต้าจากหน่วยเอาต์พุต
$$ \ delta_ {อันตราย} \: = \: \ displaystyle \ sum \ LIMIT_ {k = 1} ^ m \ delta_ {k} \: w_ {jk} $$
สามารถคำนวณระยะผิดพลาดได้ดังนี้ -
$$ \ delta_ {j} \: = \: \ delta_ {อันตราย} f ^ {'} (Q_ {อันตราย}) $$
บนพื้นฐานนี้ให้อัปเดตน้ำหนักและอคติดังนี้ -
$$ \ Delta w_ {ij} \: = \: \ alpha \ delta_ {j} x_ {i} $$
$$ \ Delta b_ {0j} \: = \: \ alpha \ delta_ {j} $$
ระยะที่ 3
Step 9 - แต่ละหน่วยเอาต์พุต (ykk = 1 to m) ปรับปรุงน้ำหนักและอคติดังนี้ -
$$ v_ {jk} (ใหม่) \: = \: v_ {jk} (เก่า) \: + \: \ Delta v_ {jk} $$
$$ b_ {0k} (ใหม่) \: = \: b_ {0k} (เก่า) \: + \: \ Delta b_ {0k} $$
Step 10 - แต่ละหน่วยเอาต์พุต (zjj = 1 to p) ปรับปรุงน้ำหนักและอคติดังนี้ -
$$ w_ {ij} (ใหม่) \: = \: w_ {ij} (เก่า) \: + \: \ Delta w_ {ij} $$
$$ b_ {0j} (ใหม่) \: = \: b_ {0j} (เก่า) \: + \: \ Delta b_ {0j} $$
Step 11 - ตรวจสอบเงื่อนไขการหยุดซึ่งอาจเป็นได้ทั้งจำนวนยุคที่ถึงหรือผลลัพธ์เป้าหมายตรงกับผลลัพธ์จริง
กฎการเรียนรู้ทั่วไปของ Delta
กฎเดลต้าใช้งานได้กับเลเยอร์เอาต์พุตเท่านั้น ในทางกลับกันกฎเดลต้าทั่วไปเรียกอีกอย่างว่าback-propagation กฎคือวิธีการสร้างค่าที่ต้องการของเลเยอร์ที่ซ่อนอยู่
การกำหนดทางคณิตศาสตร์
สำหรับฟังก์ชั่นการเปิดใช้งาน $ y_ {k} \: = \: f (y_ {ink}) $ การมาของอินพุตสุทธิบนเลเยอร์ที่ซ่อนอยู่และในชั้นเอาต์พุตสามารถกำหนดได้โดย
$$ y_ {ink} \: = \: \ displaystyle \ sum \ LIMIT_i \: z_ {i} w_ {jk} $$
และ $ \: \: y_ {อันตราย} \: = \: \ sum_i x_ {i} v_ {ij} $
ตอนนี้ข้อผิดพลาดที่ต้องย่อให้เล็กที่สุดคือ
$$ E \: = \: \ frac {1} {2} \ displaystyle \ sum \ LIMIT_ {k} \: [t_ {k} \: - \: y_ {k}] ^ 2 $$
โดยใช้กฎลูกโซ่เรามี
$$ \ frac {\ partial E} {\ partial w_ {jk}} \: = \: \ frac {\ partial} {\ partial w_ {jk}} (\ frac {1} {2} \ displaystyle \ sum \ Limit_ {k} \: [t_ {k} \: - \: y_ {k}] ^ 2) $$
$$ = \: \ frac {\ partial} {\ partial w_ {jk}} \ lgroup \ frac {1} {2} [t_ {k} \: - \: t (y_ {ink})] ^ 2 \ rgroup $$
$$ = \: - [t_ {k} \: - \: y_ {k}] \ frac {\ partial} {\ partial w_ {jk}} f (y_ {ink}) $$
$$ = \: - [t_ {k} \: - \: y_ {k}] f (y_ {ink}) \ frac {\ partial} {\ partial w_ {jk}} (y_ {ink}) $$
$$ = \: - [t_ {k} \: - \: y_ {k}] f ^ {'} (y_ {ink}) z_ {j} $$
ตอนนี้ให้เราพูดว่า $ \ delta_ {k} \: = \: - [t_ {k} \: - \: y_ {k}] f ^ {'} (y_ {ink}) $
น้ำหนักในการเชื่อมต่อกับหน่วยที่ซ่อนอยู่ zj ได้โดย -
$$ \ frac {\ partial E} {\ partial v_ {ij}} \: = \: - \ displaystyle \ sum \ LIMIT_ {k} \ delta_ {k} \ frac {\ partial} {\ partial v_ {ij} } \ :( y_ {ink}) $$
ใส่ค่า $ y_ {ink} $ เราจะได้สิ่งต่อไปนี้
$$ \ delta_ {j} \: = \: - \ displaystyle \ sum \ LIMIT_ {k} \ delta_ {k} w_ {jk} f ^ {'} (z_ {อันตราย}) $$
การอัปเดตน้ำหนักสามารถทำได้ดังนี้ -
สำหรับหน่วยเอาต์พุต -
$$ \ Delta w_ {jk} \: = \: - \ alpha \ frac {\ partial E} {\ partial w_ {jk}} $$
$$ = \: \ alpha \: \ delta_ {k} \: z_ {j} $$
สำหรับยูนิตที่ซ่อนอยู่ -
$$ \ Delta v_ {ij} \: = \: - \ alpha \ frac {\ partial E} {\ partial v_ {ij}} $$
$$ = \: \ alpha \: \ delta_ {j} \: x_ {i} $$
ตามชื่อการเรียนรู้ประเภทนี้ทำได้โดยไม่ต้องอยู่ภายใต้การดูแลของครู กระบวนการเรียนรู้นี้เป็นอิสระ ในระหว่างการฝึกอบรม ANN ภายใต้การเรียนรู้ที่ไม่มีการดูแลจะรวมเวกเตอร์อินพุตประเภทที่คล้ายคลึงกันเพื่อสร้างคลัสเตอร์ เมื่อมีการใช้รูปแบบการป้อนข้อมูลใหม่เครือข่ายประสาทจะให้การตอบสนองเอาต์พุตที่ระบุคลาสที่เป็นรูปแบบอินพุต ในนี้จะไม่มีข้อเสนอแนะจากสภาพแวดล้อมว่าอะไรควรเป็นผลลัพธ์ที่ต้องการและมันถูกต้องหรือไม่ถูกต้อง ดังนั้นในการเรียนรู้ประเภทนี้เครือข่ายจะต้องค้นพบรูปแบบคุณสมบัติจากข้อมูลอินพุตและความสัมพันธ์ของข้อมูลอินพุตผ่านเอาต์พุต
ผู้ชนะ - รับ - เครือข่ายทั้งหมด
เครือข่ายประเภทนี้ตั้งอยู่บนกฎการเรียนรู้ที่แข่งขันกันและจะใช้กลยุทธ์ที่มันเลือกเซลล์ประสาทที่มีอินพุตรวมมากที่สุดเป็นผู้ชนะ การเชื่อมต่อระหว่างเซลล์ประสาทเอาต์พุตแสดงการแข่งขันระหว่างพวกมันและหนึ่งในนั้นจะเป็น 'เปิด' ซึ่งหมายความว่าจะเป็นผู้ชนะและอื่น ๆ จะเป็น 'ปิด'
ต่อไปนี้เป็นเครือข่ายบางส่วนที่ใช้แนวคิดง่ายๆนี้โดยใช้การเรียนรู้ที่ไม่มีผู้ดูแล
Hamming Network
ในโครงข่ายประสาทเทียมส่วนใหญ่ใช้การเรียนรู้ที่ไม่มีผู้ดูแลจำเป็นอย่างยิ่งที่จะต้องคำนวณระยะทางและทำการเปรียบเทียบ เครือข่ายประเภทนี้คือเครือข่าย Hamming ซึ่งสำหรับเวกเตอร์อินพุตที่กำหนดทุกตัวจะรวมกลุ่มกันเป็นกลุ่มต่างๆ ต่อไปนี้เป็นคุณสมบัติที่สำคัญบางประการของ Hamming Networks -
Lippmann เริ่มทำงานกับเครือข่าย Hamming ในปี 1987
มันเป็นเครือข่ายชั้นเดียว
อินพุตอาจเป็นไบนารี {0, 1} ของไบโพลาร์ {-1, 1} ก็ได้
น้ำหนักของตาข่ายคำนวณโดยเวกเตอร์ตัวอย่าง
เป็นโครงข่ายน้ำหนักคงที่ซึ่งหมายความว่าน้ำหนักจะยังคงเหมือนเดิมแม้ในระหว่างการฝึก
สุทธิสูงสุด
นอกจากนี้ยังเป็นเครือข่ายน้ำหนักคงที่ซึ่งทำหน้าที่เป็นเครือข่ายย่อยสำหรับการเลือกโหนดที่มีอินพุตสูงสุด โหนดทั้งหมดเชื่อมต่อกันอย่างสมบูรณ์และมีน้ำหนักสมมาตรอยู่ในการเชื่อมต่อระหว่างกันแบบถ่วงน้ำหนักทั้งหมดเหล่านี้
สถาปัตยกรรม
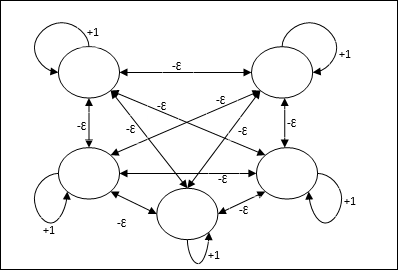
ใช้กลไกซึ่งเป็นกระบวนการซ้ำและแต่ละโหนดจะรับอินพุตยับยั้งจากโหนดอื่น ๆ ทั้งหมดผ่านการเชื่อมต่อ โหนดเดียวที่มีค่าสูงสุดจะใช้งานได้หรือเป็นผู้ชนะและการเปิดใช้งานของโหนดอื่น ๆ ทั้งหมดจะไม่ทำงาน Max Net ใช้ฟังก์ชันการเปิดใช้งานข้อมูลประจำตัวด้วย $$ f (x) \: = \: \ begin {cases} x & if \: x> 0 \\ 0 & if \: x \ leq 0 \ end {cases} $$
ภารกิจของตาข่ายนี้ทำได้โดยน้ำหนักกระตุ้นตัวเองที่ +1 และขนาดการยับยั้งซึ่งกันและกันซึ่งกำหนดไว้เช่น [0 <ɛ <$ \ frac {1} {m} $] โดยที่ “m” คือจำนวนโหนดทั้งหมด
การเรียนรู้เชิงแข่งขันใน ANN
เกี่ยวข้องกับการฝึกอบรมที่ไม่มีผู้ดูแลซึ่งโหนดเอาต์พุตพยายามแข่งขันกันเพื่อแสดงรูปแบบการป้อนข้อมูล เพื่อให้เข้าใจกฎการเรียนรู้นี้เราจะต้องทำความเข้าใจเกี่ยวกับการแข่งขันซึ่งอธิบายได้ดังนี้ -
แนวคิดพื้นฐานของเครือข่ายการแข่งขัน
เครือข่ายนี้เหมือนกับเครือข่ายฟีดฟอร์เวิร์ดชั้นเดียวที่มีการเชื่อมต่อข้อมูลป้อนกลับระหว่างเอาต์พุต การเชื่อมต่อระหว่างเอาต์พุตเป็นประเภทการยับยั้งซึ่งแสดงโดยเส้นประซึ่งหมายความว่าคู่แข่งไม่เคยสนับสนุนตัวเอง
แนวคิดพื้นฐานของกฎการเรียนรู้เชิงแข่งขัน
ดังที่กล่าวไว้ก่อนหน้านี้จะมีการแข่งขันระหว่างโหนดเอาต์พุตดังนั้นแนวคิดหลักคือ - ระหว่างการฝึกอบรมหน่วยเอาต์พุตที่มีการเปิดใช้งานสูงสุดสำหรับรูปแบบอินพุตที่กำหนดจะได้รับการประกาศให้เป็นผู้ชนะ กฎนี้เรียกอีกอย่างว่า Winner-take-all เนื่องจากมีการอัปเดตเฉพาะเซลล์ประสาทที่ชนะเท่านั้นและเซลล์ประสาทที่เหลือจะไม่เปลี่ยนแปลง
การกำหนดทางคณิตศาสตร์
ต่อไปนี้เป็นปัจจัยสำคัญสามประการสำหรับการกำหนดทางคณิตศาสตร์ของกฎการเรียนรู้นี้ -
เงื่อนไขที่จะเป็นผู้ชนะ
สมมติว่าถ้าเซลล์ประสาท yk ต้องการเป็นผู้ชนะก็จะมีเงื่อนไขดังต่อไปนี้
$$ y_ {k} \: = \: \ begin {cases} 1 & if \: v_ {k}> v_ {j} \: for \: all \: \: j, \: j \: \ neq \ : k \\ 0 & มิฉะนั้น \ end {cases} $$
หมายความว่าถ้าเซลล์ประสาทใด ๆ พูดว่า yk ต้องการที่จะชนะจากนั้นฟิลด์ท้องถิ่นที่เกิดขึ้น (ผลลัพธ์ของหน่วยผลรวม) พูด vkต้องมีขนาดใหญ่ที่สุดในบรรดาเซลล์ประสาทอื่น ๆ ในเครือข่าย
เงื่อนไขของผลรวมของน้ำหนัก
ข้อ จำกัด อีกประการหนึ่งของกฎการเรียนรู้แบบแข่งขันคือผลรวมของน้ำหนักของเซลล์ประสาทเอาท์พุตเฉพาะจะเท่ากับ 1 ตัวอย่างเช่นถ้าเราพิจารณาเซลล์ประสาท k แล้ว
$$ \ displaystyle \ sum \ LIMIT_ {k} w_ {kj} \: = \: 1 \: \: \: \: สำหรับ \: ทั้งหมด \: \: k $$
การเปลี่ยนแปลงน้ำหนักสำหรับผู้ชนะ
หากเซลล์ประสาทไม่ตอบสนองต่อรูปแบบการป้อนข้อมูลจะไม่มีการเรียนรู้เกิดขึ้นในเซลล์ประสาทนั้น อย่างไรก็ตามหากเซลล์ประสาทตัวใดตัวหนึ่งชนะน้ำหนักที่เกี่ยวข้องจะถูกปรับดังนี้ -
$$ \ Delta w_ {kj} \: = \: \ begin {cases} - \ alpha (x_ {j} \: - \: w_ {kj}), & if \: neuron \: k \: wins \\ 0 & if \: neuron \: k \: Loss \ end {cases} $$
ที่นี่ $ \ alpha $ คืออัตราการเรียนรู้
สิ่งนี้แสดงให้เห็นอย่างชัดเจนว่าเราให้ความสำคัญกับเซลล์ประสาทที่ชนะโดยการปรับน้ำหนักของมันและหากเซลล์ประสาทสูญเสียไปเราก็ไม่จำเป็นต้องปรับน้ำหนักของมันใหม่
K-mean Clustering Algorithm
K-mean เป็นหนึ่งในอัลกอริทึมการทำคลัสเตอร์ที่ได้รับความนิยมมากที่สุดซึ่งเราใช้แนวคิดของขั้นตอนการแบ่งพาร์ติชัน เราเริ่มต้นด้วยพาร์ติชันเริ่มต้นและย้ายรูปแบบจากคลัสเตอร์หนึ่งไปยังอีกคลัสเตอร์ซ้ำ ๆ จนกว่าเราจะได้ผลลัพธ์ที่น่าพอใจ
อัลกอริทึม
Step 1 - เลือก kจุดเป็นเซนทรอยด์เริ่มต้น เริ่มต้นk ต้นแบบ (w1,…,wk)ตัวอย่างเช่นเราสามารถระบุได้ด้วยเวกเตอร์อินพุตที่เลือกแบบสุ่ม -
$$ W_ {j} \: = \: i_ {p}, \: \: \: โดยที่ \: j \: \ in \ lbrace1, .... , k \ rbrace \: และ \: p \: \ ใน \ lbrace1, .... , n \ rbrace $$
แต่ละคลัสเตอร์ Cj เกี่ยวข้องกับต้นแบบ wj.
Step 2 - ทำซ้ำขั้นตอนที่ 3-5 จนกว่า E จะไม่ลดลงอีกต่อไปมิฉะนั้นการเป็นสมาชิกคลัสเตอร์จะไม่เปลี่ยนแปลงอีกต่อไป
Step 3 - สำหรับเวกเตอร์อินพุตแต่ละรายการ ip ที่ไหน p ∈ {1,…,n}ใส่ ip ในคลัสเตอร์ Cj* ด้วยต้นแบบที่ใกล้ที่สุด wj* มีความสัมพันธ์ดังต่อไปนี้
$$ | i_ {p} \: - \: w_ {j *} | \: \ leq \: | i_ {p} \: - \: w_ {j} |, \: j \: \ in \ lbrace1, .... , k \ rbrace $$
Step 4 - สำหรับแต่ละคลัสเตอร์ Cj, ที่ไหน j ∈ { 1,…,k}ปรับปรุงต้นแบบ wj เป็นเซนทรอยด์ของตัวอย่างทั้งหมดในปัจจุบัน Cj , ดังนั้น
$$ w_ {j} \: = \: \ sum_ {i_ {p} \ in C_ {j}} \ frac {i_ {p}} {| C_ {j} |} $$
Step 5 - คำนวณข้อผิดพลาดเชิงปริมาณทั้งหมดดังนี้ -
$$ E \: = \: \ sum_ {j = 1} ^ k \ sum_ {i_ {p} \ in w_ {j}} | i_ {p} \: - \: w_ {j} | ^ 2 $$
นีโอโกนิตรอน
เป็นเครือข่ายฟีดฟอร์เวิร์ดหลายชั้นซึ่งพัฒนาโดย Fukushima ในปี 1980 โมเดลนี้ใช้การเรียนรู้ภายใต้การดูแลและใช้สำหรับการจดจำรูปแบบภาพซึ่งส่วนใหญ่เป็นอักขระที่เขียนด้วยมือ โดยพื้นฐานแล้วเป็นส่วนขยายของเครือข่าย Cognitron ซึ่งได้รับการพัฒนาโดย Fukushima ในปีพ. ศ. 2518
สถาปัตยกรรม
เป็นเครือข่ายแบบลำดับชั้นซึ่งประกอบด้วยหลายชั้นและมีรูปแบบการเชื่อมต่อภายในในเลเยอร์เหล่านั้น
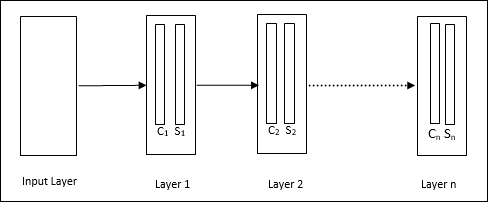
ดังที่เราได้เห็นในแผนภาพด้านบน neocognitron ถูกแบ่งออกเป็นชั้นต่างๆที่เชื่อมต่อกันและแต่ละชั้นมีสองเซลล์ คำอธิบายของเซลล์เหล่านี้มีดังนี้ -
S-Cell - เรียกว่าเซลล์ธรรมดาซึ่งได้รับการฝึกฝนให้ตอบสนองต่อรูปแบบเฉพาะหรือกลุ่มของรูปแบบ
C-Cell- เรียกว่าเซลล์ที่ซับซ้อนซึ่งรวมเอาผลลัพธ์จากเซลล์ S เข้าด้วยกันและลดจำนวนหน่วยในแต่ละอาร์เรย์ ในอีกแง่หนึ่ง C-cell แทนที่ผลลัพธ์ของ S-cell
อัลกอริทึมการฝึกอบรม
การฝึกของ neocognitron พบว่ามีความก้าวหน้าทีละชั้น น้ำหนักจากชั้นอินพุตไปยังชั้นแรกได้รับการฝึกฝนและแช่แข็ง จากนั้นน้ำหนักจากชั้นแรกถึงชั้นที่สองจะได้รับการฝึกฝนและอื่น ๆ การคำนวณภายในระหว่าง S-cell และ Ccell ขึ้นอยู่กับน้ำหนักที่มาจากชั้นก่อนหน้า ดังนั้นเราสามารถพูดได้ว่าอัลกอริทึมการฝึกขึ้นอยู่กับการคำนวณของ S-cell และ C-cell
การคำนวณใน S-cell
เซลล์ S มีสัญญาณกระตุ้นที่ได้รับจากชั้นก่อนหน้าและมีสัญญาณยับยั้งที่ได้รับภายในชั้นเดียวกัน
$$ \ theta = \: \ sqrt {\ sum \ sum t_ {i} c_ {i} ^ 2} $$
ที่นี่ ti คือน้ำหนักคงที่และ ci คือผลลัพธ์จากเซลล์ C
อินพุตที่ปรับขนาดของ S-cell สามารถคำนวณได้ดังนี้ -
$$ x \: = \: \ frac {1 \: + \: e} {1 \: + \: vw_ {0}} \: - \: 1 $$
ที่นี่ $ e \: = \: \ sum_i c_ {i} w_ {i} $
wi คือน้ำหนักที่ปรับจาก C-cell เป็น S-cell
w0 คือน้ำหนักที่ปรับได้ระหว่างอินพุตและเซลล์ S
v เป็นอินพุตกระตุ้นจากเซลล์ C
การเปิดใช้งานสัญญาณเอาต์พุตคือ
$$ s \: = \: \ begin {cases} x, & if \: x \ geq 0 \\ 0, & if \: x <0 \ end {cases} $$
การคำนวณในเซลล์ C
อินพุตสุทธิของ C-layer คือ
$$ C \: = \: \ displaystyle \ sum \ LIMIT_i s_ {i} x_ {i} $$
ที่นี่ si คือเอาต์พุตจาก S-cell และ xi คือน้ำหนักคงที่จาก S-cell ถึง C-cell
ผลลัพธ์สุดท้ายมีดังนี้ -
$$ C_ {out} \: = \: \ begin {cases} \ frac {C} {a + C}, & if \: C> 0 \\ 0, & else \ end {cases} $$
ที่นี่ ‘a’ คือพารามิเตอร์ที่ขึ้นอยู่กับประสิทธิภาพของเครือข่าย
Learning Vector Quantization (LVQ) ซึ่งแตกต่างจาก Vector quantization (VQ) และ Kohonen Self-Organizing Maps (KSOM) โดยพื้นฐานแล้วเป็นเครือข่ายการแข่งขันที่ใช้การเรียนรู้ภายใต้การดูแล เราอาจกำหนดให้เป็นกระบวนการในการจำแนกรูปแบบโดยที่แต่ละหน่วยเอาต์พุตแสดงถึงคลาส เมื่อใช้การเรียนรู้ภายใต้การดูแลเครือข่ายจะได้รับชุดของรูปแบบการฝึกอบรมที่มีการจำแนกประเภทที่รู้จักพร้อมกับการกระจายเริ่มต้นของคลาสเอาต์พุต หลังจากเสร็จสิ้นขั้นตอนการฝึก LVQ จะจำแนกเวกเตอร์อินพุตโดยกำหนดให้เป็นคลาสเดียวกับของหน่วยเอาต์พุต
สถาปัตยกรรม
รูปต่อไปนี้แสดงสถาปัตยกรรมของ LVQ ซึ่งค่อนข้างคล้ายกับสถาปัตยกรรมของ KSOM อย่างที่เราเห็นก็มี“n” จำนวนหน่วยอินพุตและ “m”จำนวนหน่วยเอาต์พุต เลเยอร์มีการเชื่อมต่อกันอย่างเต็มที่โดยมีน้ำหนักอยู่

พารามิเตอร์ที่ใช้
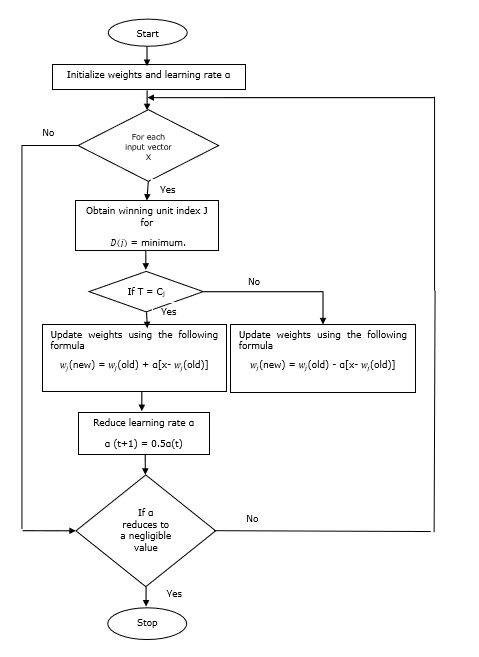
ต่อไปนี้เป็นพารามิเตอร์ที่ใช้ในกระบวนการฝึกอบรม LVQ รวมทั้งในผังงาน
x= เวกเตอร์การฝึก (x 1 , ... , x i , ... , x n )
T = คลาสสำหรับเวกเตอร์การฝึกอบรม x
wj = เวกเตอร์น้ำหนักสำหรับ jth หน่วยเอาต์พุต
Cj = คลาสที่เชื่อมโยงกับ jth หน่วยเอาต์พุต
อัลกอริทึมการฝึกอบรม
Step 1 - เริ่มต้นเวกเตอร์อ้างอิงซึ่งสามารถทำได้ดังนี้ -
Step 1(a) - จากชุดเวกเตอร์การฝึกที่กำหนดให้เลือก "m” (จำนวนคลัสเตอร์) ฝึกเวกเตอร์และใช้เป็นเวกเตอร์น้ำหนัก เวกเตอร์ที่เหลือสามารถใช้สำหรับการฝึกอบรม
Step 1(b) - กำหนดน้ำหนักเริ่มต้นและการจำแนกแบบสุ่ม
Step 1(c) - ใช้ K-mean clustering method
Step 2 - เริ่มต้นเวกเตอร์อ้างอิง $ \ alpha $
Step 3 - ทำตามขั้นตอนที่ 4-9 ต่อไปหากไม่เป็นไปตามเงื่อนไขในการหยุดอัลกอริทึมนี้
Step 4 - ทำตามขั้นตอนที่ 5-6 สำหรับเวกเตอร์อินพุตการฝึกทุกตัว x.
Step 5 - คำนวณกำลังสองของระยะทางแบบยุคลิดสำหรับ j = 1 to m และ i = 1 to n
$$ D (j) \: = \: \ displaystyle \ sum \ LIMIT_ {i = 1} ^ n \ displaystyle \ sum \ LIMIT_ {j = 1} ^ m (x_ {i} \: - \: w_ {ij }) ^ 2 $$
Step 6 - รับหน่วยที่ชนะ J ที่ไหน D(j) เป็นขั้นต่ำ
Step 7 - คำนวณน้ำหนักใหม่ของหน่วยที่ชนะตามความสัมพันธ์ต่อไปนี้ -
ถ้า T = Cj แล้ว $ w_ {j} (ใหม่) \: = \: w_ {j} (เก่า) \: + \: \ alpha [x \: - \: w_ {j} (เก่า)] $
ถ้า T ≠ Cj แล้ว $ w_ {j} (ใหม่) \: = \: w_ {j} (เก่า) \: - \: \ alpha [x \: - \: w_ {j} (เก่า)] $
Step 8 - ลดอัตราการเรียนรู้ $ \ alpha $
Step 9- ทดสอบสภาพการหยุด อาจเป็นดังนี้ -
- ถึงจำนวนสูงสุดของยุคแล้ว
- อัตราการเรียนรู้ลดลงเหลือเพียงเล็กน้อย
ผังงาน
ตัวแปร
อีกสามสายพันธุ์ ได้แก่ LVQ2, LVQ2.1 และ LVQ3 ได้รับการพัฒนาโดย Kohonen ความซับซ้อนในทั้งสามสายพันธุ์เนื่องจากแนวคิดที่ว่าผู้ชนะและหน่วยรองชนะเลิศจะได้เรียนรู้มากกว่าใน LVQ
LVQ2
ตามที่กล่าวไว้แนวคิดของสายพันธุ์อื่น ๆ ของ LVQ ข้างต้นเงื่อนไขของ LVQ2 ถูกสร้างขึ้นโดยหน้าต่าง หน้าต่างนี้จะขึ้นอยู่กับพารามิเตอร์ต่อไปนี้ -
x - เวกเตอร์อินพุตปัจจุบัน
yc - เวกเตอร์อ้างอิงที่ใกล้เคียงที่สุด x
yr - เวกเตอร์อ้างอิงอื่น ๆ ซึ่งอยู่ใกล้ที่สุด x
dc - ระยะทางจาก x ถึง yc
dr - ระยะทางจาก x ถึง yr
เวกเตอร์อินพุต x ตกหน้าต่างถ้า
$$ \ frac {d_ {c}} {d_ {r}} \:> \: 1 \: - \: \ theta \: \: และ \: \: \ frac {d_ {r}} {d_ {c }} \:> \: 1 \: + \: \ theta $$
ที่นี่ $ \ theta $ คือจำนวนตัวอย่างการฝึกอบรม
การอัปเดตสามารถทำได้ด้วยสูตรต่อไปนี้ -
$ y_ {c} (t \: + \: 1) \: = \: y_ {c} (t) \: + \: \ alpha (t) [x (t) \: - \: y_ {c} (ท)] $ (belongs to different class)
$ y_ {r} (t \: + \: 1) \: = \: y_ {r} (t) \: + \: \ alpha (t) [x (t) \: - \: y_ {r} (ท)] $ (belongs to same class)
ที่นี่ $ \ alpha $ คืออัตราการเรียนรู้
LVQ2.1
ใน LVQ2.1 เราจะหาเวกเตอร์ที่ใกล้เคียงที่สุดสองตัวคือ yc1 และ yc2 และเงื่อนไขสำหรับหน้าต่างมีดังนี้ -
$$ นาที \ เริ่มต้น {bmatrix} \ frac {d_ {c1}} {d_ {c2}}, \ frac {d_ {c2}} {d_ {c1}} \ end {bmatrix} \:> \ :( 1 \ : - \: \ theta) $$
$$ Max \ begin {bmatrix} \ frac {d_ {c1}} {d_ {c2}}, \ frac {d_ {c2}} {d_ {c1}} \ end {bmatrix} \: <\ :( 1 \ : + \: \ theta) $$
การอัปเดตสามารถทำได้ด้วยสูตรต่อไปนี้ -
$ y_ {c1} (t \: + \: 1) \: = \: y_ {c1} (t) \: + \: \ alpha (t) [x (t) \: - \: y_ {c1} (ท)] $ (belongs to different class)
$ y_ {c2} (t \: + \: 1) \: = \: y_ {c2} (t) \: + \: \ alpha (t) [x (t) \: - \: y_ {c2} (ท)] $ (belongs to same class)
ที่นี่ $ \ alpha $ คืออัตราการเรียนรู้
LVQ3
ใน LVQ3 เราจะหาเวกเตอร์ที่ใกล้เคียงที่สุดสองตัวคือ yc1 และ yc2 และเงื่อนไขสำหรับหน้าต่างมีดังนี้ -
$$ นาที \ เริ่มต้น {bmatrix} \ frac {d_ {c1}} {d_ {c2}}, \ frac {d_ {c2}} {d_ {c1}} \ end {bmatrix} \:> \ :( 1 \ : - \: \ theta) (1 \: + \: \ theta) $$
ที่นี่ $ \ theta \ ประมาณ 0.2 $
การอัปเดตสามารถทำได้ด้วยสูตรต่อไปนี้ -
$ y_ {c1} (t \: + \: 1) \: = \: y_ {c1} (t) \: + \: \ beta (t) [x (t) \: - \: y_ {c1} (ท)] $ (belongs to different class)
$ y_ {c2} (t \: + \: 1) \: = \: y_ {c2} (t) \: + \: \ beta (t) [x (t) \: - \: y_ {c2} (ท)] $ (belongs to same class)
ที่นี่ $ \ beta $ คือผลคูณของอัตราการเรียนรู้ $ \ alpha $ และ $\beta\:=\:m \alpha(t)$ สำหรับทุกๆ 0.1 < m < 0.5
เครือข่ายนี้ได้รับการพัฒนาโดย Stephen Grossberg และ Gail Carpenter ในปี 1987 โดยมีพื้นฐานมาจากการแข่งขันและใช้รูปแบบการเรียนรู้ที่ไม่มีผู้ดูแล เครือข่าย Adaptive Resonance Theory (ART) ตามชื่อที่แนะนำนั้นเปิดกว้างสำหรับการเรียนรู้ใหม่ ๆ (ปรับตัวได้) โดยไม่สูญเสียรูปแบบเก่า ๆ โดยทั่วไปเครือข่าย ART เป็นลักษณนามเวกเตอร์ซึ่งรับเวกเตอร์อินพุตและจำแนกเป็นประเภทใดประเภทหนึ่งขึ้นอยู่กับรูปแบบที่จัดเก็บไว้ซึ่งคล้ายคลึงกันมากที่สุด
หัวหน้าฝ่ายปฏิบัติการ
การดำเนินการหลักของการจำแนกประเภท ART สามารถแบ่งออกเป็นขั้นตอนต่อไปนี้ -
Recognition phase- เวกเตอร์อินพุตถูกเปรียบเทียบกับการจำแนกประเภทที่นำเสนอในทุกโหนดในชั้นเอาต์พุต ผลลัพธ์ของเซลล์ประสาทจะกลายเป็น“ 1” หากตรงกับการจำแนกประเภทที่ใช้มากที่สุดมิฉะนั้นจะกลายเป็น“ 0”
Comparison phase- ในขั้นตอนนี้จะทำการเปรียบเทียบเวกเตอร์อินพุตกับเวกเตอร์เลเยอร์เปรียบเทียบ เงื่อนไขสำหรับการรีเซ็ตคือระดับของความคล้ายคลึงกันจะน้อยกว่าพารามิเตอร์การเฝ้าระวัง
Search phase- ในขั้นตอนนี้เครือข่ายจะค้นหาการรีเซ็ตและการจับคู่ที่ทำในขั้นตอนข้างต้น ดังนั้นหากไม่มีการรีเซ็ตและการแข่งขันค่อนข้างดีการจัดประเภทจะสิ้นสุดลง มิฉะนั้นกระบวนการจะซ้ำและต้องส่งรูปแบบอื่น ๆ ที่จัดเก็บไว้เพื่อค้นหาการจับคู่ที่ถูกต้อง
ART1
เป็น ART ประเภทหนึ่งซึ่งออกแบบมาเพื่อจัดกลุ่มเวกเตอร์ไบนารี เราสามารถเข้าใจเกี่ยวกับเรื่องนี้ได้ด้วยสถาปัตยกรรมของมัน
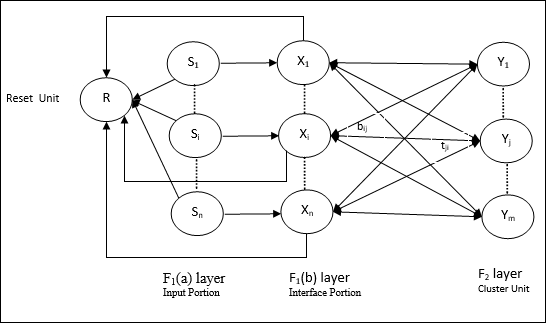
สถาปัตยกรรมของ ART1
ประกอบด้วยสองหน่วยต่อไปนี้ -
Computational Unit - ประกอบด้วยสิ่งต่อไปนี้ -
Input unit (F1 layer) - นอกจากนี้ยังมีสองส่วนต่อไปนี้ -
F1(a) layer (Input portion)- ใน ART1 จะไม่มีการประมวลผลในส่วนนี้แทนที่จะมีเวกเตอร์อินพุตเท่านั้น เชื่อมต่อกับเลเยอร์F 1 (b) (ส่วนอินเตอร์เฟส)
F1(b) layer (Interface portion)- ส่วนนี้รวมสัญญาณจากส่วนอินพุตกับเลเยอร์F 2 เลเยอร์F 1 (b) เชื่อมต่อกับเลเยอร์F 2โดยใช้น้ำหนักจากล่างขึ้นบนbijและชั้นF 2เชื่อมต่อกับชั้น F 1 (b) ผ่านน้ำหนักจากบนลงล่างtji.
Cluster Unit (F2 layer)- นี่คือเลเยอร์การแข่งขัน หน่วยที่มีอินพุตสุทธิที่ใหญ่ที่สุดถูกเลือกเพื่อเรียนรู้รูปแบบการป้อนข้อมูล การเปิดใช้งานของคลัสเตอร์ยูนิตอื่น ๆ ทั้งหมดถูกตั้งค่าเป็น 0
Reset Mechanism- การทำงานของกลไกนี้ขึ้นอยู่กับความคล้ายคลึงกันระหว่างน้ำหนักจากบนลงล่างและเวกเตอร์อินพุต ตอนนี้ถ้าระดับของความคล้ายคลึงกันนี้น้อยกว่าพารามิเตอร์การเฝ้าระวังคลัสเตอร์จะไม่ได้รับอนุญาตให้เรียนรู้รูปแบบและส่วนที่เหลือจะเกิดขึ้น
Supplement Unit - จริงๆแล้วปัญหาเกี่ยวกับกลไกการรีเซ็ตก็คือเลเยอร์ F2จะต้องถูกยับยั้งภายใต้เงื่อนไขบางประการและจะต้องพร้อมใช้งานเมื่อเกิดการเรียนรู้บางอย่าง นั่นคือเหตุผลที่หน่วยเสริมสองหน่วย ได้แก่G1 และ G2 ถูกเพิ่มพร้อมกับหน่วยรีเซ็ต R. พวกเขาเรียกว่าgain control units. หน่วยเหล่านี้รับและส่งสัญญาณไปยังหน่วยอื่น ๆ ที่มีอยู่ในเครือข่าย‘+’ บ่งบอกถึงสัญญาณกระตุ้นในขณะที่ ‘−’ บ่งบอกถึงสัญญาณยับยั้ง
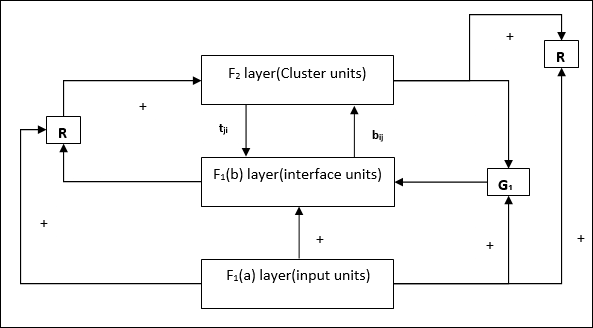
พารามิเตอร์ที่ใช้
ใช้พารามิเตอร์ต่อไปนี้ -
n - จำนวนส่วนประกอบในเวกเตอร์อินพุต
m - จำนวนคลัสเตอร์สูงสุดที่สามารถสร้างได้
bij- น้ำหนักตั้งแต่ F 1 (b) ถึง F 2ชั้นคือน้ำหนักจากล่างขึ้นบน
tji- น้ำหนักตั้งแต่ชั้น F 2ถึง F 1 (b) คือน้ำหนักจากบนลงล่าง
ρ - พารามิเตอร์การเฝ้าระวัง
||x|| - บรรทัดฐานของเวกเตอร์ x
อัลกอริทึม
Step 1 - เริ่มต้นอัตราการเรียนรู้พารามิเตอร์การเฝ้าระวังและน้ำหนักดังนี้ -
$$ \ alpha \:> \: 1 \: \: และ \: \: 0 \: <\ rho \: \ leq \: 1 $$
$$ 0 \: <\: b_ {ij} (0) \: <\: \ frac {\ alpha} {\ alpha \: - \: 1 \: + \: n} \: \: และ \: \: t_ {ij} (0) \: = \: 1 $$
Step 2 - ทำต่อขั้นตอนที่ 3-9 เมื่อเงื่อนไขการหยุดไม่เป็นจริง
Step 3 - ดำเนินการต่อในขั้นตอนที่ 4-6 สำหรับทุกการฝึกอบรม
Step 4- ตั้งค่าการเปิดใช้งานของหน่วย F 1 (a) และ F 1ทั้งหมดดังนี้
F2 = 0 and F1(a) = input vectors
Step 5- ต้องส่งสัญญาณอินพุตจากเลเยอร์F 1 (a) ถึง F 1 (b) เช่น
$$ s_ {i} \: = \: x_ {i} $$
Step 6- สำหรับทุกโหนดF 2 ที่ถูกยับยั้ง
$ y_ {j} \: = \: \ sum_i b_ {ij} x_ {i} $ เงื่อนไขคือ yj ≠ -1
Step 7 - ทำตามขั้นตอนที่ 8-10 เมื่อการรีเซ็ตเป็นจริง
Step 8 - ค้นหา J สำหรับ yJ ≥ yj สำหรับโหนดทั้งหมด j
Step 9- คำนวณการเปิดใช้งานอีกครั้งใน F 1 (b) ดังนี้
$$ x_ {i} \: = \: sitJi $$
Step 10 - ตอนนี้หลังจากคำนวณบรรทัดฐานของเวกเตอร์แล้ว x และเวกเตอร์ sเราต้องตรวจสอบเงื่อนไขการรีเซ็ตดังนี้ -
ถ้า ||x||/ ||s|| <พารามิเตอร์การเฝ้าระวัง ρ, theninhibitnode J และไปที่ขั้นตอนที่ 7
อื่น ๆ ถ้า ||x||/ ||s|| ≥พารามิเตอร์การเฝ้าระวัง ρจากนั้นดำเนินการต่อไป
Step 11 - อัปเดตน้ำหนักสำหรับโหนด J สามารถทำได้ดังนี้ -
$$ b_ {ij} (ใหม่) \: = \: \ frac {\ alpha x_ {i}} {\ alpha \: - \: 1 \: + \: || x ||} $$
$$ t_ {ij} (ใหม่) \: = \: x_ {i} $$
Step 12 - ต้องตรวจสอบเงื่อนไขการหยุดสำหรับอัลกอริทึมและอาจเป็นดังนี้ -
- ห้ามมีการเปลี่ยนแปลงของน้ำหนัก
- ไม่ได้ทำการรีเซ็ตสำหรับหน่วย
- ถึงจำนวนสูงสุดของยุคแล้ว
สมมติว่าเรามีรูปแบบของมิติตามอำเภอใจอย่างไรก็ตามเราต้องการมิติเหล่านี้ในมิติเดียวหรือสองมิติ จากนั้นกระบวนการทำแผนที่คุณลักษณะจะมีประโยชน์มากในการแปลงพื้นที่รูปแบบกว้างให้เป็นพื้นที่คุณลักษณะทั่วไป ตอนนี้คำถามเกิดขึ้นว่าทำไมเราต้องมีแผนผังคุณลักษณะการจัดระเบียบตนเอง? เหตุผลก็คือพร้อมกับความสามารถในการแปลงขนาดตามอำเภอใจให้เป็น 1-D หรือ 2-D แล้วยังต้องมีความสามารถในการรักษาโทโพโลยีเพื่อนบ้าน
โครงสร้างเพื่อนบ้านใน Kohonen SOM
อาจมีโทโพโลยีหลายแบบอย่างไรก็ตามโทโพโลยีสองแบบต่อไปนี้ถูกใช้มากที่สุด -
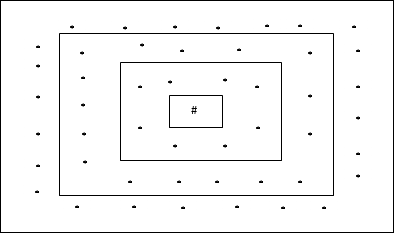
โครงสร้างตารางสี่เหลี่ยม
โทโพโลยีนี้มี 24 โหนดในกริดระยะทาง -2, 16 โหนดในตารางระยะทาง -1 และ 8 โหนดในตารางระยะทาง -0 ซึ่งหมายความว่าความแตกต่างระหว่างกริดสี่เหลี่ยมแต่ละโหนดคือ 8 โหนด หน่วยที่ชนะแสดงด้วย #
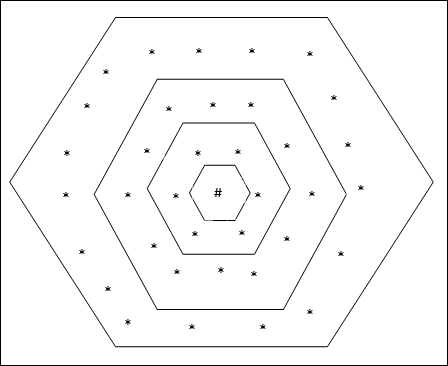
โครงสร้างตารางหกเหลี่ยม
โทโพโลยีนี้มี 18 โหนดในตารางระยะทาง -2, 12 โหนดในตารางระยะทาง -1 และ 6 โหนดในตารางระยะทาง -0 ซึ่งหมายความว่าความแตกต่างระหว่างกริดสี่เหลี่ยมแต่ละอันคือ 6 โหนด หน่วยที่ชนะแสดงด้วย #
สถาปัตยกรรม
สถาปัตยกรรมของ KSOM นั้นคล้ายกับเครือข่ายการแข่งขัน ด้วยความช่วยเหลือของโครงร่างพื้นที่ใกล้เคียงที่กล่าวถึงก่อนหน้านี้การฝึกอบรมสามารถเกิดขึ้นในพื้นที่ขยายของเครือข่าย
อัลกอริทึมสำหรับการฝึกอบรม
Step 1 - เริ่มต้นน้ำหนักอัตราการเรียนรู้ α และโครงการทอพอโลยีของพื้นที่ใกล้เคียง
Step 2 - ทำต่อขั้นตอนที่ 3-9 เมื่อเงื่อนไขการหยุดไม่เป็นจริง
Step 3 - ดำเนินการต่อในขั้นตอนที่ 4-6 สำหรับทุกอินพุตเวกเตอร์ x.
Step 4 - คำนวณกำลังสองของระยะทางแบบยุคลิดสำหรับ j = 1 to m
$$ D (j) \: = \: \ displaystyle \ sum \ LIMIT_ {i = 1} ^ n \ displaystyle \ sum \ LIMIT_ {j = 1} ^ m (x_ {i} \: - \: w_ {ij }) ^ 2 $$
Step 5 - รับหน่วยที่ชนะ J ที่ไหน D(j) เป็นขั้นต่ำ
Step 6 - คำนวณน้ำหนักใหม่ของหน่วยที่ชนะตามความสัมพันธ์ต่อไปนี้ -
$$ w_ {ij} (ใหม่) \: = \: w_ {ij} (เก่า) \: + \: \ alpha [x_ {i} \: - \: w_ {ij} (เก่า)] $$
Step 7 - อัปเดตอัตราการเรียนรู้ α ตามความสัมพันธ์ต่อไปนี้ -
$$ \ alpha (t \: + \: 1) \: = \: 0.5 \ alpha t $$
Step 8 - ลดรัศมีของโครงร่างโทโพโลยี
Step 9 - ตรวจสอบเงื่อนไขการหยุดสำหรับเครือข่าย
เครือข่ายประสาทเทียมประเภทนี้ทำงานบนพื้นฐานของการเชื่อมโยงรูปแบบซึ่งหมายความว่าพวกเขาสามารถจัดเก็บรูปแบบที่แตกต่างกันและในขณะที่ให้เอาต์พุตพวกเขาสามารถสร้างรูปแบบที่จัดเก็บอย่างใดอย่างหนึ่งโดยจับคู่กับรูปแบบการป้อนข้อมูลที่กำหนด ความทรงจำประเภทนี้เรียกอีกอย่างว่าContent-Addressable Memory(ลูกเบี้ยว). Associative memory ทำการค้นหาแบบขนานด้วยรูปแบบที่จัดเก็บไว้เป็นไฟล์ข้อมูล
ต่อไปนี้เป็นความทรงจำเชื่อมโยงสองประเภทที่เราสามารถสังเกตได้ -
- Auto Associative Memory
- หน่วยความจำ Hetero Associative
Auto Associative Memory
นี่คือโครงข่ายประสาทชั้นเดียวที่เวกเตอร์การฝึกอินพุตและเวกเตอร์เป้าหมายของเอาต์พุตเหมือนกัน น้ำหนักจะถูกกำหนดเพื่อให้เครือข่ายเก็บชุดรูปแบบ
สถาปัตยกรรม
ดังแสดงในรูปต่อไปนี้สถาปัตยกรรมของเครือข่ายหน่วยความจำ Auto Associative มี ‘n’ จำนวนเวกเตอร์การฝึกป้อนข้อมูลและสิ่งที่คล้ายกัน ‘n’ จำนวนเวกเตอร์เป้าหมายเอาต์พุต
อัลกอริทึมการฝึกอบรม
สำหรับการฝึกอบรมเครือข่ายนี้ใช้กฎการเรียนรู้ Hebb หรือ Delta
Step 1 - เริ่มต้นน้ำหนักทั้งหมดเป็นศูนย์เป็น wij = 0 (i = 1 to n, j = 1 to n)
Step 2 - ทำตามขั้นตอนที่ 3-4 สำหรับเวกเตอร์อินพุตแต่ละตัว
Step 3 - เปิดใช้งานหน่วยอินพุตแต่ละหน่วยดังนี้ -
$$ x_ {i} \: = \: s_ {i} \ :( i \: = \: 1 \: ถึง \: n) $$
Step 4 - เปิดใช้งานเอาต์พุตแต่ละยูนิตดังนี้ -
$$ y_ {j} \: = \: s_ {j} \ :( j \: = \: 1 \: ถึง \: n) $$
Step 5 - ปรับน้ำหนักดังนี้ -
$$ w_ {ij} (ใหม่) \: = \: w_ {ij} (เก่า) \: + \: x_ {i} y_ {j} $$
อัลกอริทึมการทดสอบ
Step 1 - กำหนดน้ำหนักที่ได้รับระหว่างการฝึกตามกฎของเฮบบ์
Step 2 - ทำตามขั้นตอนที่ 3-5 สำหรับเวกเตอร์อินพุตแต่ละตัว
Step 3 - ตั้งค่าการเปิดใช้งานหน่วยอินพุตให้เท่ากับเวกเตอร์อินพุต
Step 4 - คำนวณอินพุตสุทธิของแต่ละหน่วยเอาต์พุต j = 1 to n
$$ y_ {อันตราย} \: = \: \ displaystyle \ sum \ LIMIT_ {i = 1} ^ n x_ {i} w_ {ij} $$
Step 5 - ใช้ฟังก์ชันการเปิดใช้งานต่อไปนี้เพื่อคำนวณผลลัพธ์
$$ y_ {j} \: = \: f (y_ {อันตราย}) \: = \: \ begin {cases} +1 & if \: y_ {อันตราย} \:> \: 0 \\ - 1 & if \: y_ {อันตราย} \: \ leqslant \: 0 \ end {cases} $$
หน่วยความจำ Hetero Associative
คล้ายกับเครือข่าย Auto Associative Memory ซึ่งเป็นเครือข่ายประสาทชั้นเดียว อย่างไรก็ตามในเครือข่ายนี้เวกเตอร์การฝึกอินพุตและเวกเตอร์เป้าหมายของเอาต์พุตจะไม่เหมือนกัน น้ำหนักจะถูกกำหนดเพื่อให้เครือข่ายเก็บชุดรูปแบบ เครือข่ายการเชื่อมโยง Hetero เป็นแบบคงที่ดังนั้นจึงไม่มีการดำเนินการที่ไม่ใช่เชิงเส้นและล่าช้า
สถาปัตยกรรม
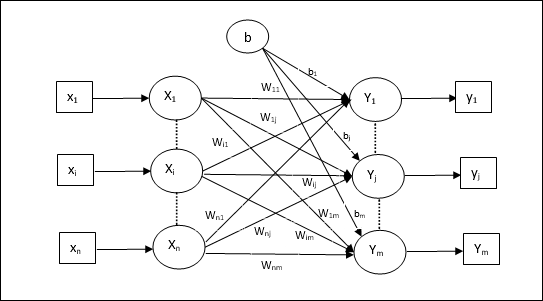
ดังแสดงในรูปต่อไปนี้สถาปัตยกรรมของเครือข่าย Hetero Associative Memory มี ‘n’ จำนวนเวกเตอร์การฝึกป้อนข้อมูลและ ‘m’ จำนวนเวกเตอร์เป้าหมายเอาต์พุต
อัลกอริทึมการฝึกอบรม
สำหรับการฝึกอบรมเครือข่ายนี้ใช้กฎการเรียนรู้ Hebb หรือ Delta
Step 1 - เริ่มต้นน้ำหนักทั้งหมดเป็นศูนย์เป็น wij = 0 (i = 1 to n, j = 1 to m)
Step 2 - ทำตามขั้นตอนที่ 3-4 สำหรับเวกเตอร์อินพุตแต่ละตัว
Step 3 - เปิดใช้งานหน่วยอินพุตแต่ละหน่วยดังนี้ -
$$ x_ {i} \: = \: s_ {i} \ :( i \: = \: 1 \: ถึง \: n) $$
Step 4 - เปิดใช้งานเอาต์พุตแต่ละยูนิตดังนี้ -
$$ y_ {j} \: = \: s_ {j} \ :( j \: = \: 1 \: ถึง \: m) $$
Step 5 - ปรับน้ำหนักดังนี้ -
$$ w_ {ij} (ใหม่) \: = \: w_ {ij} (เก่า) \: + \: x_ {i} y_ {j} $$
อัลกอริทึมการทดสอบ
Step 1 - กำหนดน้ำหนักที่ได้รับระหว่างการฝึกตามกฎของเฮบบ์
Step 2 - ทำตามขั้นตอนที่ 3-5 สำหรับเวกเตอร์อินพุตแต่ละตัว
Step 3 - ตั้งค่าการเปิดใช้งานหน่วยอินพุตให้เท่ากับเวกเตอร์อินพุต
Step 4 - คำนวณอินพุตสุทธิของแต่ละหน่วยเอาต์พุต j = 1 to m;
$$ y_ {อันตราย} \: = \: \ displaystyle \ sum \ LIMIT_ {i = 1} ^ n x_ {i} w_ {ij} $$
Step 5 - ใช้ฟังก์ชันการเปิดใช้งานต่อไปนี้เพื่อคำนวณผลลัพธ์
$$ y_ {j} \: = \: f (y_ {อันตราย}) \: = \: \ begin {cases} +1 & if \: y_ {อันตราย} \:> \: 0 \\ 0 & if \ : y_ {อันตราย} \: = \: 0 \\ - 1 & if \: y_ {อันตราย} \: <\: 0 \ end {cases} $$
โครงข่ายประสาทเทียม Hopfield ถูกคิดค้นโดยดร. จอห์นเจ. ฮ็อปฟิลด์ในปี พ.ศ. 2525 ประกอบด้วยชั้นเดียวซึ่งประกอบด้วยเซลล์ประสาทที่เกิดซ้ำที่เชื่อมต่อกันอย่างสมบูรณ์อย่างน้อยหนึ่งเซลล์ เครือข่าย Hopfield มักใช้สำหรับการเชื่อมโยงอัตโนมัติและงานการเพิ่มประสิทธิภาพ
เครือข่าย Hopfield แบบไม่ต่อเนื่อง
เครือข่าย Hopfield ซึ่งทำงานในรูปแบบเส้นแยกหรือกล่าวอีกนัยหนึ่งอาจกล่าวได้ว่ารูปแบบอินพุตและเอาต์พุตเป็นเวกเตอร์ที่ไม่ต่อเนื่องซึ่งอาจเป็นได้ทั้งไบนารี (0,1) หรือไบโพลาร์ (+1, -1) ในธรรมชาติ เครือข่ายมีน้ำหนักสมมาตรโดยไม่มีการเชื่อมต่อด้วยตนเองเช่นwij = wji และ wii = 0.
สถาปัตยกรรม
ต่อไปนี้เป็นประเด็นสำคัญบางประการที่ควรทราบเกี่ยวกับเครือข่าย Hopfield แบบไม่ต่อเนื่อง -
แบบจำลองนี้ประกอบด้วยเซลล์ประสาทที่มีการกลับด้านหนึ่งตัวและหนึ่งเอาต์พุตที่ไม่กลับด้าน
ผลลัพธ์ของเซลล์ประสาทแต่ละเซลล์ควรเป็นข้อมูลของเซลล์ประสาทอื่น ๆ แต่ไม่ใช่ข้อมูลของตัวเอง
น้ำหนัก / ความแข็งแรงของการเชื่อมต่อแสดงโดย wij.
การเชื่อมต่อสามารถกระตุ้นได้เช่นเดียวกับการยับยั้ง มันจะถูกกระตุ้นถ้าผลลัพธ์ของเซลล์ประสาทเหมือนกับอินพุตมิฉะนั้นจะถูกยับยั้ง
น้ำหนักควรสมมาตรกล่าวคือ wij = wji
ผลลัพธ์จาก Y1 กำลังจะ Y2, Yi และ Yn มีน้ำหนัก w12, w1i และ w1nตามลำดับ ในทำนองเดียวกันส่วนโค้งอื่น ๆ ก็มีน้ำหนักอยู่
อัลกอริทึมการฝึกอบรม
ในระหว่างการฝึกอบรมเครือข่าย Hopfield แบบไม่ต่อเนื่องน้ำหนักจะถูกอัปเดต ดังที่เราทราบว่าเราสามารถมีเวกเตอร์อินพุตไบนารีเช่นเดียวกับเวกเตอร์อินพุตสองขั้ว ดังนั้นในทั้งสองกรณีการอัปเดตน้ำหนักสามารถทำได้ด้วยความสัมพันธ์ต่อไปนี้
Case 1 - รูปแบบการป้อนข้อมูลไบนารี
สำหรับชุดรูปแบบไบนารี s(p), p = 1 to P
ที่นี่ s(p) = s1(p), s2(p),..., si(p),..., sn(p)
Weight Matrix กำหนดโดย
$$ w_ {ij} \: = \: \ sum_ {p = 1} ^ P [2s_ {i} (p) - \: 1] [2s_ {j} (p) - \: 1] \: \: \: \: \: สำหรับ \: i \: \ neq \: j $$
Case 2 - รูปแบบการป้อนข้อมูลสองขั้ว
สำหรับชุดรูปแบบไบนารี s(p), p = 1 to P
ที่นี่ s(p) = s1(p), s2(p),..., si(p),..., sn(p)
Weight Matrix กำหนดโดย
$$ w_ {ij} \: = \: \ sum_ {p = 1} ^ P [s_ {i} (p)] [s_ {j} (p)] \: \: \: \: \: สำหรับ \ : i \: \ neq \: j $$
อัลกอริทึมการทดสอบ
Step 1 - เริ่มต้นน้ำหนักซึ่งได้รับจากอัลกอริทึมการฝึกอบรมโดยใช้หลักการ Hebbian
Step 2 - ทำตามขั้นตอนที่ 3-9 หากการเปิดใช้งานเครือข่ายไม่รวมเข้าด้วยกัน
Step 3 - สำหรับเวกเตอร์อินพุตแต่ละรายการ Xทำตามขั้นตอนที่ 4-8
Step 4 - ทำการเปิดใช้งานครั้งแรกของเครือข่ายเท่ากับเวกเตอร์อินพุตภายนอก X ดังต่อไปนี้ -
$$ y_ {i} \: = \: x_ {i} \: \: \: สำหรับ \: i \: = \: 1 \: ถึง \: n $$
Step 5 - สำหรับแต่ละยูนิต Yiทำตามขั้นตอนที่ 6-9
Step 6 - คำนวณอินพุตสุทธิของเครือข่ายดังนี้ -
$$ y_ {ini} \: = \: x_ {i} \: + \: \ displaystyle \ sum \ LIMIT_ {j} y_ {j} w_ {ji} $$
Step 7 - ใช้การเปิดใช้งานดังต่อไปนี้เหนืออินพุตสุทธิเพื่อคำนวณผลลัพธ์ -
$$ y_ {i} \: = \ begin {cases} 1 & if \: y_ {ini} \:> \: \ theta_ {i} \\ y_ {i} & if \: y_ {ini} \: = \: \ theta_ {i} \\ 0 & if \: y_ {ini} \: <\: \ theta_ {i} \ end {cases} $$
นี่ $ \ theta_ {i} $ คือเกณฑ์
Step 8 - ออกอากาศเอาต์พุตนี้ yi ไปยังหน่วยอื่น ๆ ทั้งหมด
Step 9 - ทดสอบเครือข่ายสำหรับการเชื่อมต่อ
การประเมินฟังก์ชันพลังงาน
ฟังก์ชันพลังงานถูกกำหนดให้เป็นฟังก์ชันที่ถูกผูกมัดและไม่เพิ่มฟังก์ชันของสถานะของระบบ
ฟังก์ชันพลังงาน Ef, เรียกอีกอย่างว่า Lyapunov function กำหนดความเสถียรของเครือข่าย Hopfield แบบไม่ต่อเนื่องและมีลักษณะดังนี้ -
$$ E_ {f} \: = \: - \ frac {1} {2} \ displaystyle \ sum \ LIMIT_ {i = 1} ^ n \ displaystyle \ sum \ LIMIT_ {j = 1} ^ n y_ {i} y_ {j} w_ {ij} \: - \: \ displaystyle \ sum \ LIMIT_ {i = 1} ^ n x_ {i} y_ {i} \: + \: \ displaystyle \ sum \ LIMIT_ {i = 1} ^ n \ theta_ {i} y_ {i} $$
Condition - ในเครือข่ายที่เสถียรเมื่อใดก็ตามที่สถานะของโหนดเปลี่ยนไปฟังก์ชันพลังงานข้างต้นจะลดลง
สมมติว่าเมื่อโหนด i ได้เปลี่ยนสถานะจาก $ y_i ^ {(k)} $ เป็น $ y_i ^ {(k \: + \: 1)} $ จากนั้นการเปลี่ยนแปลงพลังงาน $ \ Delta E_ {f} $ จะได้รับจากความสัมพันธ์ต่อไปนี้
$$ \ Delta E_ {f} \: = \: E_ {f} (y_i ^ {(k + 1)}) \: - \: E_ {f} (y_i ^ {(k)}) $$
$$ = \: - \ left (\ start {array} {c} \ displaystyle \ sum \ LIMIT_ {j = 1} ^ n w_ {ij} y_i ^ {(k)} \: + \: x_ {i} \: - \: \ theta_ {i} \ end {array} \ right) (y_i ^ {(k + 1)} \: - \: y_i ^ {(k)}) $$
$$ = \: - \ :( net_ {i}) \ Delta y_ {i} $$
ที่นี่ $ \ Delta y_ {i} \: = \: y_i ^ {(k \: + \: 1)} \: - \: y_i ^ {(k)} $
การเปลี่ยนแปลงของพลังงานขึ้นอยู่กับข้อเท็จจริงที่ว่ามีเพียงหน่วยเดียวเท่านั้นที่สามารถอัปเดตการเปิดใช้งานได้ในแต่ละครั้ง
เครือข่าย Hopfield อย่างต่อเนื่อง
เมื่อเปรียบเทียบกับเครือข่าย Discrete Hopfield เครือข่ายแบบต่อเนื่องมีเวลาเป็นตัวแปรต่อเนื่อง นอกจากนี้ยังใช้ในการเชื่อมโยงอัตโนมัติและปัญหาการเพิ่มประสิทธิภาพเช่นปัญหาพนักงานขายในการเดินทาง
Model - โมเดลหรือสถาปัตยกรรมสามารถสร้างขึ้นได้โดยการเพิ่มส่วนประกอบไฟฟ้าเช่นแอมพลิฟายเออร์ซึ่งสามารถแมปแรงดันไฟฟ้าขาเข้ากับแรงดันไฟฟ้าขาออกผ่านฟังก์ชันการกระตุ้นซิกมอยด์
การประเมินฟังก์ชันพลังงาน
$$ E_f = \ frac {1} {2} \ displaystyle \ sum \ LIMIT_ {i = 1} ^ n \ sum _ {\ substack {j = 1 \\ j \ ne i}} ^ n y_i y_j w_ {ij} - \ displaystyle \ sum \ LIMIT_ {i = 1} ^ n x_i y_i + \ frac {1} {\ lambda} \ displaystyle \ sum \ LIMIT_ {i = 1} ^ n \ sum _ {\ substack {j = 1 \\ j \ ne i}} ^ n w_ {ij} g_ {ri} \ int_ {0} ^ {y_i} a ^ {- 1} (y) dy $$
ที่นี่ λ คือพารามิเตอร์กำไรและ gri การนำไฟฟ้าเข้า
สิ่งเหล่านี้เป็นกระบวนการเรียนรู้แบบสุ่มที่มีโครงสร้างเกิดขึ้นซ้ำและเป็นพื้นฐานของเทคนิคการเพิ่มประสิทธิภาพขั้นต้นที่ใช้ใน ANN Boltzmann Machine ถูกคิดค้นโดย Geoffrey Hinton และ Terry Sejnowski ในปี 1985 ความชัดเจนมากขึ้นสามารถสังเกตได้จากคำพูดของ Hinton เกี่ยวกับ Boltzmann Machine
“ คุณสมบัติที่น่าแปลกใจของเครือข่ายนี้คือใช้เฉพาะข้อมูลที่มีอยู่ในท้องถิ่นเท่านั้น การเปลี่ยนแปลงของน้ำหนักขึ้นอยู่กับพฤติกรรมของทั้งสองหน่วยที่เชื่อมต่อกันแม้ว่าการเปลี่ยนแปลงจะเพิ่มประสิทธิภาพการวัดระดับโลกก็ตาม” - Ackley, Hinton 1985
ประเด็นสำคัญบางประการเกี่ยวกับเครื่อง Boltzmann -
พวกเขาใช้โครงสร้างที่เกิดซ้ำ
ประกอบด้วยเซลล์ประสาทสุ่มซึ่งมีหนึ่งในสองสถานะที่เป็นไปได้คือ 1 หรือ 0
เซลล์ประสาทบางส่วนในนี้ปรับตัวได้ (สถานะอิสระ) และบางส่วนถูกยึด (สถานะแช่แข็ง)
หากเราใช้การอบแบบจำลองบนเครือข่าย Hopfield แบบแยกส่วนมันก็จะกลายเป็น Boltzmann Machine
วัตถุประสงค์ของเครื่อง Boltzmann
วัตถุประสงค์หลักของ Boltzmann Machine คือการเพิ่มประสิทธิภาพการแก้ปัญหา เป็นผลงานของ Boltzmann Machine ในการปรับน้ำหนักและปริมาณที่เกี่ยวข้องกับปัญหานั้นให้เหมาะสม
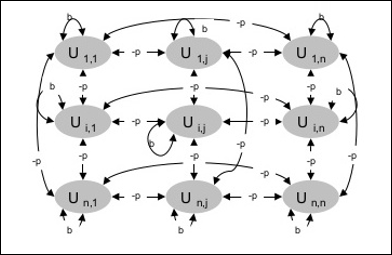
สถาปัตยกรรม
แผนภาพต่อไปนี้แสดงสถาปัตยกรรมของเครื่อง Boltzmann เห็นได้ชัดจากแผนภาพว่าเป็นอาร์เรย์สองมิติของหน่วย ที่นี่น้ำหนักเกี่ยวกับการเชื่อมต่อระหว่างหน่วยคือ–p ที่ไหน p > 0. น้ำหนักของการเชื่อมต่อด้วยตนเองได้รับจากb ที่ไหน b > 0.
อัลกอริทึมการฝึกอบรม
อย่างที่เราทราบกันดีว่าเครื่อง Boltzmann มีน้ำหนักคงที่ดังนั้นจึงไม่มีอัลกอริทึมการฝึกอบรมเนื่องจากเราไม่จำเป็นต้องอัปเดตน้ำหนักในเครือข่าย อย่างไรก็ตามในการทดสอบเครือข่ายเราต้องตั้งค่าน้ำหนักและค้นหาฟังก์ชันฉันทามติ (CF)
เครื่อง Boltzmann มีชุดหน่วย Ui และ Uj และมีการเชื่อมต่อแบบสองทิศทาง
เรากำลังพิจารณาน้ำหนักคงที่พูด wij.
wij ≠ 0 ถ้า Ui และ Uj มีการเชื่อมต่อ
นอกจากนี้ยังมีความสมมาตรในการเชื่อมต่อโครงข่ายแบบถ่วงน้ำหนักเช่น wij = wji.
wii นอกจากนี้ยังมีอยู่เช่นจะมีการเชื่อมต่อระหว่างหน่วย
สำหรับยูนิตใด ๆ Uiสถานะของมัน ui จะเป็น 1 หรือ 0
วัตถุประสงค์หลักของ Boltzmann Machine คือการเพิ่ม Consensus Function (CF) ให้มากที่สุดซึ่งสามารถกำหนดได้จากความสัมพันธ์ต่อไปนี้
$$ CF \: = \: \ displaystyle \ sum \ LIMIT_ {i} \ displaystyle \ sum \ LIMIT_ {j \ leqslant i} w_ {ij} u_ {i} u_ {j} $$
ตอนนี้เมื่อสถานะเปลี่ยนจาก 1 เป็น 0 หรือจาก 0 เป็น 1 การเปลี่ยนแปลงฉันทามติสามารถกำหนดได้โดยความสัมพันธ์ต่อไปนี้ -
$$ \ Delta CF \: = \ :( 1 \: - \: 2u_ {i}) (w_ {ij} \: + \: \ displaystyle \ sum \ LIMIT_ {j \ neq i} u_ {i} w_ { ij}) $$
ที่นี่ ui คือสถานะปัจจุบันของ Ui.
ความแปรผันของค่าสัมประสิทธิ์ (1 - 2ui) กำหนดโดยความสัมพันธ์ต่อไปนี้ -
$$ (1 \: - \: 2u_ {i}) \: = \: \ begin {cases} +1, & U_ {i} \: is \: current \: off \\ - 1, & U_ {i } \: is \: ปัจจุบัน \: เมื่อ \ end {cases} $$
โดยทั่วไปหน่วย Uiไม่เปลี่ยนสถานะ แต่ถ้าเป็นเช่นนั้นข้อมูลจะอยู่ในพื้นที่ของหน่วย ด้วยการเปลี่ยนแปลงดังกล่าวก็จะมีฉันทามติของเครือข่ายเพิ่มขึ้นด้วย
ความน่าจะเป็นของเครือข่ายที่จะยอมรับการเปลี่ยนแปลงในสถานะของหน่วยจะได้รับจากความสัมพันธ์ต่อไปนี้ -
$$ AF (i, T) \: = \: \ frac {1} {1 \: + \: exp [- \ frac {\ Delta CF (i)} {T}]} $$
ที่นี่ Tเป็นพารามิเตอร์ควบคุม มันจะลดลงเมื่อ CF ถึงค่าสูงสุด
อัลกอริทึมการทดสอบ
Step 1 - เริ่มต้นสิ่งต่อไปนี้เพื่อเริ่มการฝึกอบรม -
- น้ำหนักที่แสดงถึงข้อ จำกัด ของปัญหา
- พารามิเตอร์ควบคุม T
Step 2 - ทำตามขั้นตอนที่ 3-8 ต่อเมื่อเงื่อนไขการหยุดไม่เป็นจริง
Step 3 - ทำตามขั้นตอนที่ 4-7
Step 4 - สมมติว่าสถานะใดสถานะหนึ่งได้เปลี่ยนน้ำหนักและเลือกจำนวนเต็ม I, J เป็นค่าสุ่มระหว่าง 1 และ n.
Step 5 - คำนวณการเปลี่ยนแปลงของฉันทามติดังนี้ -
$$ \ Delta CF \: = \ :( 1 \: - \: 2u_ {i}) (w_ {ij} \: + \: \ displaystyle \ sum \ LIMIT_ {j \ neq i} u_ {i} w_ { ij}) $$
Step 6 - คำนวณความน่าจะเป็นที่เครือข่ายนี้จะยอมรับการเปลี่ยนแปลงสถานะ
$$ AF (i, T) \: = \: \ frac {1} {1 \: + \: exp [- \ frac {\ Delta CF (i)} {T}]} $$
Step 7 - ยอมรับหรือปฏิเสธการเปลี่ยนแปลงนี้ดังนี้ -
Case I - ถ้า R < AFยอมรับการเปลี่ยนแปลง
Case II - ถ้า R ≥ AFปฏิเสธการเปลี่ยนแปลง
ที่นี่ R คือตัวเลขสุ่มระหว่าง 0 ถึง 1
Step 8 - ลดพารามิเตอร์ควบคุม (อุณหภูมิ) ดังนี้ -
T(new) = 0.95T(old)
Step 9 - ทดสอบเงื่อนไขการหยุดซึ่งอาจเป็นดังนี้ -
- อุณหภูมิถึงค่าที่กำหนด
- ไม่มีการเปลี่ยนแปลงสถานะสำหรับการทำซ้ำตามจำนวนที่ระบุ
Brain-State-in-a-Box (BSB) neural network เป็นเครือข่ายประสาทเทียมแบบ nonlinear auto-Associative และสามารถขยายไปสู่การเชื่อมโยงแบบ hetero ที่มีสองเลเยอร์ขึ้นไป นอกจากนี้ยังคล้ายกับเครือข่าย Hopfield เสนอโดย JA Anderson, JW Silverstein, SA Ritz และ RS Jones ในปีพ. ศ. 2520
ประเด็นสำคัญที่ต้องจำเกี่ยวกับ BSB Network -
เป็นเครือข่ายที่เชื่อมต่อเต็มรูปแบบโดยมีจำนวนโหนดสูงสุดขึ้นอยู่กับขนาด n ของพื้นที่ป้อนข้อมูล
เซลล์ประสาททั้งหมดได้รับการอัปเดตพร้อมกัน
เซลล์ประสาทรับค่าระหว่าง -1 ถึง +1
สูตรทางคณิตศาสตร์
ฟังก์ชันโหนดที่ใช้ในเครือข่าย BSB เป็นฟังก์ชันทางลาดซึ่งสามารถกำหนดได้ดังนี้ -
$$ f (net) \: = \: min (1, \: max (-1, \: net)) $$
ฟังก์ชันทางลาดนี้มีขอบเขตและต่อเนื่อง
ดังที่เราทราบว่าแต่ละโหนดจะเปลี่ยนสถานะสามารถทำได้ด้วยความช่วยเหลือของความสัมพันธ์ทางคณิตศาสตร์ต่อไปนี้ -
$$ x_ {t} (t \: + \: 1) \: = \: f \ left (\ begin {array} {c} \ displaystyle \ sum \ LIMIT_ {j = 1} ^ n w_ {i, j } x_ {j} (t) \ end {array} \ right) $$
ที่นี่ xi(t) คือสถานะของไฟล์ ith โหนดในเวลา t.
น้ำหนักจาก ith โหนดถึง jth โหนดสามารถวัดได้ด้วยความสัมพันธ์ต่อไปนี้ -
$$ w_ {ij} \: = \: \ frac {1} {P} \ displaystyle \ sum \ LIMIT_ {p = 1} ^ P (v_ {p, i} \: v_ {p, j}) $$
ที่นี่ P คือจำนวนรูปแบบการฝึกอบรมซึ่งเป็นสองขั้ว
การเพิ่มประสิทธิภาพเป็นการดำเนินการเพื่อให้บางสิ่งบางอย่างเช่นการออกแบบสถานการณ์ทรัพยากรและระบบมีประสิทธิภาพมากที่สุด การใช้ความคล้ายคลึงกันระหว่างฟังก์ชันต้นทุนและฟังก์ชันพลังงานเราสามารถใช้เซลล์ประสาทที่เชื่อมต่อกันอย่างมากเพื่อแก้ปัญหาการเพิ่มประสิทธิภาพ เครือข่ายประสาทชนิดดังกล่าวคือเครือข่าย Hopfield ซึ่งประกอบด้วยชั้นเดียวที่มีเซลล์ประสาทที่เกิดซ้ำที่เชื่อมต่อกันอย่างสมบูรณ์อย่างน้อยหนึ่งเซลล์ สามารถใช้เพื่อเพิ่มประสิทธิภาพ
สิ่งที่ต้องจำขณะใช้เครือข่าย Hopfield เพื่อการเพิ่มประสิทธิภาพ -
ฟังก์ชันพลังงานต้องต่ำสุดของเครือข่าย
จะพบวิธีแก้ปัญหาที่น่าพอใจแทนที่จะเลือกรูปแบบที่จัดเก็บไว้
คุณภาพของโซลูชันที่พบโดยเครือข่าย Hopfield นั้นขึ้นอยู่กับสถานะเริ่มต้นของเครือข่ายอย่างมีนัยสำคัญ
ปัญหาพนักงานขายในการเดินทาง
การค้นหาเส้นทางที่สั้นที่สุดที่พนักงานขายเดินทางเป็นหนึ่งในปัญหาด้านการคำนวณซึ่งสามารถปรับให้เหมาะสมได้โดยใช้เครือข่ายประสาทเทียม Hopfield
แนวคิดพื้นฐานของ TSP
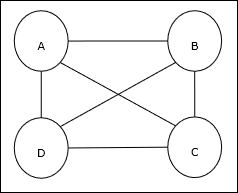
Travelling Salesman Problem (TSP) เป็นปัญหาการเพิ่มประสิทธิภาพแบบคลาสสิกที่พนักงานขายต้องเดินทาง nเมืองที่เชื่อมต่อกันโดยรักษาค่าใช้จ่ายตลอดจนระยะทางที่เดินทางต่ำสุด ตัวอย่างเช่นพนักงานขายต้องเดินทาง 4 เมือง A, B, C, D และเป้าหมายคือค้นหาทัวร์วงกลมที่สั้นที่สุด ABC – D เพื่อลดค่าใช้จ่ายให้น้อยที่สุดซึ่งรวมถึงค่าใช้จ่ายในการเดินทางจาก เมืองสุดท้าย D ไปยังเมืองแรก A
การเป็นตัวแทนเมทริกซ์
จริงๆแล้ว TSP แต่ละครั้งของ n-city สามารถแสดงเป็นไฟล์ n × n เมทริกซ์ที่มี ith แถวอธิบายไฟล์ ithที่ตั้งของเมือง. เมทริกซ์นี้Mสำหรับ 4 เมือง A, B, C, D สามารถแสดงได้ดังนี้ -
$$ M = \ begin {bmatrix} A: & 1 & 0 & 0 & 0 \\ B: & 0 & 1 & 0 & 0 \\ C: & 0 & 0 & 1 & 0 \\ D: & 0 & 0 & 0 & 1 \ end {bmatrix} $$
โซลูชันโดย Hopfield Network
ในขณะที่พิจารณาโซลูชันของ TSP โดยเครือข่าย Hopfield นี้ทุกโหนดในเครือข่ายจะสอดคล้องกับองค์ประกอบหนึ่งในเมทริกซ์
การคำนวณฟังก์ชันพลังงาน
เพื่อให้เป็นโซลูชันที่เหมาะสมที่สุดฟังก์ชันพลังงานจะต้องมีค่าต่ำสุด บนพื้นฐานของข้อ จำกัด ต่อไปนี้เราสามารถคำนวณฟังก์ชันพลังงานได้ดังนี้ -
ข้อ จำกัด - I
ข้อ จำกัด ประการแรกบนพื้นฐานที่เราจะคำนวณฟังก์ชันพลังงานคือองค์ประกอบหนึ่งจะต้องเท่ากับ 1 ในแต่ละแถวของเมทริกซ์ M และองค์ประกอบอื่น ๆ ในแต่ละแถวต้องเท่ากับ 0เนื่องจากแต่ละเมืองสามารถเกิดขึ้นได้เพียงตำแหน่งเดียวใน TSP tour ข้อ จำกัด นี้สามารถเขียนทางคณิตศาสตร์ได้ดังนี้ -
$$ \ displaystyle \ sum \ LIMIT_ {j = 1} ^ n M_ {x, j} \: = \: 1 \: สำหรับ \: x \: \ in \: \ lbrace1, ... , n \ rbrace $ $
ตอนนี้ฟังก์ชันพลังงานที่จะย่อเล็กสุดตามข้อ จำกัด ข้างต้นจะมีคำที่เป็นสัดส่วนกับ -
$$ \ displaystyle \ sum \ LIMIT_ {x = 1} ^ n \ left (\ begin {array} {c} 1 \: - \: \ displaystyle \ sum \ LIMIT_ {j = 1} ^ n M_ {x, j } \ end {array} \ right) ^ 2 $$
ข้อ จำกัด -II
ดังที่เราทราบใน TSP หนึ่งเมืองสามารถเกิดขึ้นได้ในตำแหน่งใดก็ได้ในทัวร์ด้วยเหตุนี้ในแต่ละคอลัมน์ของเมทริกซ์ Mองค์ประกอบหนึ่งต้องเท่ากับ 1 และองค์ประกอบอื่น ๆ ต้องเท่ากับ 0 ข้อ จำกัด นี้สามารถเขียนทางคณิตศาสตร์ได้ดังนี้ -
$$ \ displaystyle \ sum \ LIMIT_ {x = 1} ^ n M_ {x, j} \: = \: 1 \: สำหรับ \: j \: \ in \: \ lbrace1, ... , n \ rbrace $ $
ตอนนี้ฟังก์ชันพลังงานที่จะย่อเล็กสุดตามข้อ จำกัด ข้างต้นจะมีคำที่เป็นสัดส่วนกับ -
$$ \ displaystyle \ sum \ LIMIT_ {j = 1} ^ n \ left (\ begin {array} {c} 1 \: - \: \ displaystyle \ sum \ LIMIT_ {x = 1} ^ n M_ {x, j } \ end {array} \ right) ^ 2 $$
การคำนวณฟังก์ชันต้นทุน
สมมติว่าเมทริกซ์กำลังสองของ (n × n) แสดงโดย C หมายถึงเมทริกซ์ต้นทุนของ TSP สำหรับ n เมืองที่ n > 0. ต่อไปนี้เป็นพารามิเตอร์บางส่วนในขณะคำนวณฟังก์ชันต้นทุน -
Cx, y - องค์ประกอบของเมทริกซ์ต้นทุนแสดงถึงต้นทุนการเดินทางจากเมือง x ถึง y.
ความคลาดเคลื่อนขององค์ประกอบของ A และ B สามารถแสดงได้ด้วยความสัมพันธ์ต่อไปนี้ -
$$ M_ {x, i} \: = \: 1 \: \: and \: \: M_ {y, i \ pm 1} \: = \: 1 $$
ดังที่เราทราบใน Matrix ค่าเอาต์พุตของแต่ละโหนดอาจเป็น 0 หรือ 1 ดังนั้นสำหรับทุกคู่ของเมือง A, B เราสามารถเพิ่มเงื่อนไขต่อไปนี้ในฟังก์ชันพลังงาน -
$$ \ displaystyle \ sum \ LIMIT_ {i = 1} ^ n C_ {x, y} M_ {x, i} (M_ {y, i + 1} \: + \: M_ {y, i-1}) $$
บนพื้นฐานของฟังก์ชันต้นทุนและค่าข้อ จำกัด ข้างต้นฟังก์ชันพลังงานขั้นสุดท้าย E ได้ดังนี้ -
$$ E \: = \: \ frac {1} {2} \ displaystyle \ sum \ LIMIT_ {i = 1} ^ n \ displaystyle \ sum \ LIMIT_ {x} \ displaystyle \ sum \ LIMIT_ {y \ neq x} C_ {x, y} M_ {x, i} (M_ {y, i + 1} \: + \: M_ {y, i-1}) \: + $$
$$ \: \ begin {bmatrix} \ gamma_ {1} \ displaystyle \ sum \ LIMIT_ {x} \ left (\ begin {array} {c} 1 \: - \: \ displaystyle \ sum \ LIMIT_ {i} M_ {x, i} \ end {array} \ right) ^ 2 \: + \: \ gamma_ {2} \ displaystyle \ sum \ LIMIT_ {i} \ left (\ begin {array} {c} 1 \: - \ : \ displaystyle \ sum \ LIMIT_ {x} M_ {x, i} \ end {array} \ right) ^ 2 \ end {bmatrix} $$
ที่นี่ γ1 และ γ2 คือค่าคงที่ในการชั่งน้ำหนักสองค่า
เทคนิคการไล่ระดับสีแบบวนซ้ำ
การไล่ระดับสีหรือที่เรียกว่าโคตรชันที่สุดคืออัลกอริธึมการเพิ่มประสิทธิภาพแบบวนซ้ำเพื่อค้นหาฟังก์ชันขั้นต่ำในพื้นที่ ในขณะที่ลดฟังก์ชันลงเรามีความกังวลกับค่าใช้จ่ายหรือข้อผิดพลาดที่จะลดลง (จดจำปัญหาพนักงานขายในการเดินทาง) มีการใช้อย่างกว้างขวางในการเรียนรู้เชิงลึกซึ่งมีประโยชน์ในหลากหลายสถานการณ์ ประเด็นที่ต้องจำไว้คือเราเกี่ยวข้องกับการเพิ่มประสิทธิภาพในพื้นที่ไม่ใช่การเพิ่มประสิทธิภาพระดับโลก
แนวคิดการทำงานหลัก
เราสามารถเข้าใจแนวคิดการทำงานหลักของการไล่ระดับสีด้วยความช่วยเหลือของขั้นตอนต่อไปนี้ -
ขั้นแรกเริ่มต้นด้วยการเดาทางแก้ปัญหาเบื้องต้น
จากนั้นใช้การไล่ระดับสีของฟังก์ชันที่จุดนั้น
จากนั้นให้ทำซ้ำขั้นตอนโดยก้าวโซลูชันไปในทิศทางลบของการไล่ระดับสี
โดยทำตามขั้นตอนข้างต้นในที่สุดอัลกอริทึมจะมาบรรจบกันโดยที่การไล่ระดับสีเป็นศูนย์
แนวคิดทางคณิตศาสตร์
สมมติว่าเรามีฟังก์ชัน f(x)และเรากำลังพยายามหาค่าต่ำสุดของฟังก์ชันนี้ ต่อไปนี้เป็นขั้นตอนในการค้นหาขั้นต่ำของf(x).
ขั้นแรกให้ค่าเริ่มต้น $ x_ {0} \: สำหรับ \: x $
ตอนนี้ใช้การไล่ระดับสี $ \ nabla f $ ของฟังก์ชันโดยสัญชาตญาณว่าการไล่ระดับสีจะให้ความชันของเส้นโค้งที่ x และทิศทางจะชี้ไปที่การเพิ่มขึ้นของฟังก์ชันเพื่อหาทิศทางที่ดีที่สุดในการย่อขนาด
ตอนนี้เปลี่ยน x ดังนี้ -
$$ x_ {n \: + \: 1} \: = \: x_ {n} \: - \: \ theta \ nabla f (x_ {n}) $$
ที่นี่ θ > 0 คืออัตราการฝึก (ขนาดขั้นตอน) ที่บังคับให้อัลกอริทึมต้องกระโดดเล็กน้อย
การประมาณขนาดขั้นตอน
ขนาดขั้นตอนที่ไม่ถูกต้องจริงๆ θอาจไปไม่ถึงการบรรจบกันดังนั้นการเลือกอย่างรอบคอบจึงมีความสำคัญมาก ต้องจำประเด็นต่อไปนี้ในขณะที่เลือกขนาดขั้นตอน
อย่าเลือกขนาดของขั้นตอนที่ใหญ่เกินไปมิฉะนั้นจะมีผลกระทบในทางลบกล่าวคือมันจะแตกต่างกันมากกว่าที่จะมาบรรจบกัน
อย่าเลือกขนาดขั้นตอนที่เล็กเกินไปมิฉะนั้นจะใช้เวลามากในการบรรจบกัน
ตัวเลือกบางอย่างเกี่ยวกับการเลือกขนาดขั้นตอน -
ทางเลือกหนึ่งคือเลือกขนาดขั้นตอนคงที่
อีกทางเลือกหนึ่งคือการเลือกขนาดขั้นตอนอื่นสำหรับการทำซ้ำทุกครั้ง
การหลอมจำลอง
แนวคิดพื้นฐานของ Simulated Annealing (SA) ได้รับแรงบันดาลใจจากการหลอมในของแข็ง ในกระบวนการหลอมโลหะหากเราให้ความร้อนโลหะเหนือจุดหลอมเหลวและทำให้โลหะเย็นลงคุณสมบัติของโครงสร้างจะขึ้นอยู่กับอัตราการหล่อเย็น เรายังสามารถพูดได้ว่า SA จำลองกระบวนการหลอมโลหะ
ใช้ใน ANN
SA เป็นวิธีการคำนวณแบบสุ่มซึ่งได้รับแรงบันดาลใจจากการเปรียบเทียบการหลอมเพื่อประมาณการเพิ่มประสิทธิภาพทั่วโลกของฟังก์ชันที่กำหนด เราสามารถใช้ SA เพื่อฝึกเครือข่ายประสาทฟีดไปข้างหน้า
อัลกอริทึม
Step 1 - สร้างโซลูชันแบบสุ่ม
Step 2 - คำนวณต้นทุนโดยใช้ฟังก์ชันต้นทุน
Step 3 - สร้างโซลูชันใกล้เคียงแบบสุ่ม
Step 4 - คำนวณต้นทุนโซลูชันใหม่โดยใช้ฟังก์ชันต้นทุนเดียวกัน
Step 5 - เปรียบเทียบต้นทุนของโซลูชันใหม่กับโซลูชันเก่าดังนี้ -
ถ้า CostNew Solution < CostOld Solution จากนั้นย้ายไปที่โซลูชันใหม่
Step 6 - ทดสอบเงื่อนไขการหยุดซึ่งอาจเป็นจำนวนครั้งสูงสุดของการทำซ้ำที่ถึงหรือได้รับโซลูชันที่ยอมรับได้
ธรรมชาติเป็นแหล่งที่มาของแรงบันดาลใจที่ดีสำหรับมวลมนุษยชาติ Genetic Algorithms (GAs) เป็นอัลกอริธึมที่ใช้การค้นหาตามแนวคิดของการคัดเลือกโดยธรรมชาติและพันธุศาสตร์ GAs เป็นชุดย่อยของสาขาการคำนวณที่ใหญ่กว่าที่เรียกว่าEvolutionary Computation.
GAs ได้รับการพัฒนาโดย John Holland และนักศึกษาและเพื่อนร่วมงานของเขาที่ University of Michigan โดยเฉพาะอย่างยิ่ง David E.Goldberg และได้รับการทดลองในปัญหาการเพิ่มประสิทธิภาพต่างๆพร้อมกับความสำเร็จในระดับสูง
ใน GAs เรามีกลุ่มหรือกลุ่มของวิธีแก้ปัญหาที่เป็นไปได้สำหรับปัญหาที่กำหนด จากนั้นวิธีการแก้ปัญหาเหล่านี้จะผ่านการรวมตัวกันใหม่และการกลายพันธุ์ (เช่นเดียวกับในพันธุศาสตร์ตามธรรมชาติ) ผลิตลูกใหม่และกระบวนการนี้ซ้ำแล้วซ้ำอีกในชั่วอายุต่างๆ แต่ละคน (หรือวิธีการแก้ปัญหาของผู้สมัคร) จะได้รับการกำหนดค่าสมรรถภาพ (ตามค่าฟังก์ชันวัตถุประสงค์) และบุคคลที่มีความเหมาะสมจะได้รับโอกาสที่สูงกว่าในการผสมพันธุ์และให้ผลตอบแทนแก่บุคคลที่ "ช่างฟิต" มากขึ้น ซึ่งสอดคล้องกับทฤษฎีดาร์วินเรื่อง“ Survival of the Fittest”
ด้วยวิธีนี้เราจะ“ พัฒนา” บุคคลหรือแนวทางแก้ไขที่ดีขึ้นเรื่อย ๆ มาหลายชั่วอายุคนจนกว่าจะถึงเกณฑ์ที่หยุดชะงัก
อัลกอริทึมทางพันธุกรรมมีการสุ่มอย่างเพียงพอในลักษณะ แต่จะทำงานได้ดีกว่าการค้นหาในพื้นที่แบบสุ่มมาก (ซึ่งเราลองใช้วิธีการสุ่มแบบต่างๆเพื่อติดตามสิ่งที่ดีที่สุดจนถึงตอนนี้) เนื่องจากใช้ประโยชน์จากข้อมูลในอดีตเช่นกัน
ข้อดีของ GAs
GAs มีข้อดีหลายประการซึ่งทำให้พวกเขาได้รับความนิยมอย่างกว้างขวาง ซึ่ง ได้แก่ -
ไม่ต้องการข้อมูลอนุพันธ์ใด ๆ (ซึ่งอาจไม่มีให้สำหรับปัญหาในโลกแห่งความเป็นจริง)
เร็วขึ้นและมีประสิทธิภาพมากขึ้นเมื่อเทียบกับวิธีการแบบเดิม
มีความสามารถแบบขนานที่ดีมาก
ปรับฟังก์ชั่นทั้งแบบต่อเนื่องและไม่ต่อเนื่องตลอดจนปัญหาหลายวัตถุประสงค์
แสดงรายการโซลูชันที่ "ดี" ไม่ใช่แค่โซลูชันเดียว
มักจะได้รับคำตอบสำหรับปัญหาซึ่งจะดีขึ้นเมื่อเวลาผ่านไป
มีประโยชน์เมื่อพื้นที่ค้นหามีขนาดใหญ่มากและมีพารามิเตอร์จำนวนมากที่เกี่ยวข้อง
ข้อ จำกัด ของ GAs
เช่นเดียวกับเทคนิคอื่น ๆ GAs ก็มีข้อ จำกัด บางประการเช่นกัน ซึ่ง ได้แก่ -
GAs ไม่เหมาะกับทุกปัญหาโดยเฉพาะปัญหาที่เรียบง่ายและมีข้อมูลอนุพันธ์
ค่าฟิตเนสจะคำนวณซ้ำ ๆ ซึ่งอาจมีราคาแพงในการคำนวณสำหรับปัญหาบางอย่าง
การสุ่มตัวอย่างจะไม่มีการรับประกันเกี่ยวกับความเหมาะสมหรือคุณภาพของโซลูชัน
หากไม่ได้ติดตั้งอย่างถูกต้อง GA อาจไม่รวมเข้ากับโซลูชันที่เหมาะสมที่สุด
GA - แรงจูงใจ
อัลกอริทึมทางพันธุกรรมมีความสามารถในการนำเสนอโซลูชันที่ "ดีเพียงพอ" "เร็วพอ" สิ่งนี้ทำให้ Gas น่าสนใจสำหรับใช้ในการแก้ปัญหาการเพิ่มประสิทธิภาพ เหตุผลที่ GAs จำเป็นมีดังต่อไปนี้ -
การแก้ปัญหาที่ยาก
ในวิทยาการคอมพิวเตอร์มีปัญหาชุดใหญ่ซึ่ง ได้แก่ NP-Hard. สิ่งนี้หมายความว่าโดยพื้นฐานแล้วแม้แต่ระบบคอมพิวเตอร์ที่ทรงพลังที่สุดก็ใช้เวลานานมาก (เป็นปี!) ในการแก้ปัญหานั้น ในสถานการณ์เช่นนี้ GAs พิสูจน์แล้วว่าเป็นเครื่องมือที่มีประสิทธิภาพในการจัดหาusable near-optimal solutions ในช่วงเวลาสั้น ๆ
ความล้มเหลวของวิธีการไล่ระดับสี
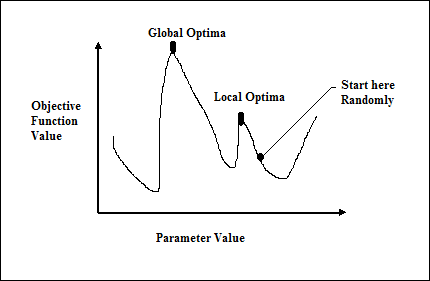
วิธีการที่ใช้แคลคูลัสแบบดั้งเดิมทำงานโดยเริ่มจากจุดสุ่มและโดยการเคลื่อนที่ไปตามทิศทางของการไล่ระดับสีจนกระทั่งเราไปถึงจุดสูงสุดของเนินเขา เทคนิคนี้มีประสิทธิภาพและใช้ได้ผลดีกับฟังก์ชันวัตถุประสงค์จุดยอดเดียวเช่นฟังก์ชันต้นทุนในการถดถอยเชิงเส้น อย่างไรก็ตามในสถานการณ์จริงส่วนใหญ่เรามีปัญหาที่ซับซ้อนมากที่เรียกว่าภูมิประเทศซึ่งประกอบด้วยยอดเขาจำนวนมากและหุบเขาจำนวนมากซึ่งทำให้วิธีการดังกล่าวล้มเหลวเนื่องจากพวกเขาต้องทนทุกข์ทรมานจากแนวโน้มที่จะติดอยู่ที่ Optima ในท้องถิ่นดังที่แสดง ในรูปต่อไปนี้
รับทางออกที่ดีอย่างรวดเร็ว
ปัญหาที่ยากบางอย่างเช่นปัญหาพนักงานขายการเดินทาง (TSP) มีแอปพลิเคชันในโลกแห่งความเป็นจริงเช่นการค้นหาเส้นทางและการออกแบบ VLSI ลองนึกภาพว่าคุณกำลังใช้ระบบการนำทางด้วย GPS และใช้เวลาสองสามนาที (หรือสองสามชั่วโมง) ในการคำนวณเส้นทางที่ "เหมาะสมที่สุด" จากต้นทางไปยังปลายทาง ความล่าช้าในแอปพลิเคชันในโลกแห่งความเป็นจริงนั้นไม่สามารถยอมรับได้ดังนั้นโซลูชันที่ "ดีเพียงพอ" ซึ่งส่งมอบให้ "เร็ว" จึงเป็นสิ่งที่จำเป็น
วิธีใช้ GA สำหรับปัญหาการเพิ่มประสิทธิภาพ
เราทราบดีอยู่แล้วว่าการเพิ่มประสิทธิภาพเป็นการกระทำเพื่อให้บางสิ่งบางอย่างเช่นการออกแบบสถานการณ์ทรัพยากรและระบบมีประสิทธิภาพมากที่สุด กระบวนการเพิ่มประสิทธิภาพจะแสดงในแผนภาพต่อไปนี้

ขั้นตอนของกลไก GA สำหรับกระบวนการเพิ่มประสิทธิภาพ
ต่อไปนี้เป็นขั้นตอนของกลไก GA เมื่อใช้เพื่อเพิ่มประสิทธิภาพของปัญหา
สร้างประชากรเริ่มต้นแบบสุ่ม
เลือกโซลูชันเริ่มต้นที่มีค่าสมรรถภาพที่ดีที่สุด
รวมโซลูชันที่เลือกใหม่โดยใช้ตัวดำเนินการการกลายพันธุ์และครอสโอเวอร์
แทรกลูกหลานเข้าไปในประชากร
ตอนนี้หากตรงตามเงื่อนไขการหยุดแล้วให้ส่งคืนโซลูชันที่มีค่าสมรรถภาพที่ดีที่สุด จากนั้นไปที่ขั้นตอนที่ 2
ก่อนที่จะศึกษาสาขาที่ ANN ถูกนำไปใช้อย่างกว้างขวางเราจำเป็นต้องเข้าใจว่าเหตุใด ANN จึงเป็นตัวเลือกที่ต้องการของแอปพลิเคชัน
ทำไมต้องใช้โครงข่ายประสาทเทียม
เราจำเป็นต้องเข้าใจคำตอบของคำถามข้างต้นด้วยตัวอย่างของมนุษย์ ตอนเป็นเด็กเราเคยเรียนรู้สิ่งต่างๆโดยได้รับความช่วยเหลือจากผู้ปกครองซึ่งรวมถึงพ่อแม่หรือครูของเราด้วย หลังจากนั้นด้วยการเรียนรู้ด้วยตนเองหรือฝึกฝนทำให้เราเรียนรู้ไปตลอดชีวิต นักวิทยาศาสตร์และนักวิจัยยังทำให้เครื่องจักรมีความชาญฉลาดเช่นเดียวกับมนุษย์และ ANN ก็มีบทบาทสำคัญเช่นเดียวกันเนื่องจากเหตุผลดังต่อไปนี้ -
ด้วยความช่วยเหลือของโครงข่ายประสาทเทียมเราสามารถค้นหาวิธีแก้ปัญหาดังกล่าวซึ่งวิธีการอัลกอริทึมมีราคาแพงหรือไม่มีอยู่จริง
โครงข่ายประสาทเทียมสามารถเรียนรู้ได้ด้วยเหตุนี้เราจึงไม่จำเป็นต้องตั้งโปรแกรมในขอบเขตมากนัก
โครงข่ายประสาทมีความแม่นยำและความเร็วที่รวดเร็วกว่าความเร็วทั่วไปอย่างมาก
พื้นที่การใช้งาน
ต่อไปนี้เป็นพื้นที่บางส่วนที่มีการใช้ ANN แสดงให้เห็นว่า ANN มีแนวทางสหวิทยาการในการพัฒนาและการประยุกต์ใช้
การรู้จำเสียง
คำพูดมีบทบาทสำคัญในปฏิสัมพันธ์ระหว่างมนุษย์กับมนุษย์ ดังนั้นจึงเป็นเรื่องธรรมดาที่ผู้คนจะคาดหวังการเชื่อมต่อด้วยเสียงกับคอมพิวเตอร์ ในยุคปัจจุบันสำหรับการสื่อสารกับเครื่องจักรมนุษย์ยังคงต้องการภาษาที่ซับซ้อนซึ่งยากต่อการเรียนรู้และใช้งาน เพื่อลดอุปสรรคในการสื่อสารนี้วิธีแก้ปัญหาง่ายๆคือการสื่อสารด้วยภาษาพูดที่เป็นไปได้เพื่อให้เครื่องเข้าใจ
มีความก้าวหน้าอย่างมากในสาขานี้อย่างไรก็ตามระบบประเภทนี้ยังคงประสบปัญหาเกี่ยวกับคำศัพท์หรือไวยากรณ์ที่ จำกัด พร้อมกับปัญหาในการฝึกอบรมระบบใหม่สำหรับผู้พูดที่แตกต่างกันในเงื่อนไขที่แตกต่างกัน ANN มีบทบาทสำคัญในด้านนี้ ANN ต่อไปนี้ถูกใช้เพื่อการรู้จำเสียง -
เครือข่ายหลายชั้น
เครือข่ายหลายชั้นที่มีการเชื่อมต่อซ้ำ
แผนผังคุณลักษณะการจัดระเบียบตัวเองของ Kohonen
เครือข่ายที่มีประโยชน์ที่สุดสำหรับสิ่งนี้คือแผนผังคุณลักษณะการจัดระเบียบตัวเองของ Kohonen ซึ่งมีข้อมูลเข้าเป็นส่วนสั้น ๆ ของรูปคลื่นเสียงพูด จะแมปฟอนิมชนิดเดียวกันกับอาร์เรย์เอาต์พุตเรียกว่าเทคนิคการแยกคุณลักษณะ หลังจากแยกคุณสมบัติแล้วด้วยความช่วยเหลือของโมเดลอะคูสติกบางรุ่นเป็นการประมวลผลแบบแบ็คเอนด์มันจะจดจำเสียงพูด
การจดจำตัวละคร
เป็นปัญหาที่น่าสนใจซึ่งอยู่ภายใต้พื้นที่ทั่วไปของการจดจำรูปแบบ โครงข่ายประสาทเทียมจำนวนมากได้รับการพัฒนาเพื่อการจดจำอักขระที่เขียนด้วยลายมือโดยอัตโนมัติไม่ว่าจะเป็นตัวอักษรหรือตัวเลข ต่อไปนี้เป็น ANN บางส่วนที่ใช้ในการจดจำอักขระ -
- โครงข่ายประสาทเทียมหลายชั้นเช่นโครงข่ายประสาทแบบ Backpropagation
- Neocognitron
แม้ว่าเครือข่ายประสาทเทียมแบบย้อนกลับจะมีเลเยอร์ที่ซ่อนอยู่หลายชั้น แต่รูปแบบของการเชื่อมต่อจากชั้นหนึ่งไปยังชั้นถัดไปจะถูกแปลเป็นภาษาท้องถิ่น ในทำนองเดียวกัน neocognitron ยังมีเลเยอร์ที่ซ่อนอยู่หลายชั้นและการฝึกอบรมจะทำทีละชั้นสำหรับการใช้งานประเภทนี้
ใบสมัครยืนยันลายเซ็น
ลายเซ็นเป็นวิธีที่มีประโยชน์ที่สุดวิธีหนึ่งในการอนุญาตและรับรองความถูกต้องของบุคคลในธุรกรรมทางกฎหมาย เทคนิคการตรวจสอบลายเซ็นเป็นเทคนิคที่ไม่ใช้การมองเห็น
สำหรับแอปพลิเคชันนี้แนวทางแรกคือการแยกคุณลักษณะหรือชุดคุณลักษณะทางเรขาคณิตที่เป็นตัวแทนของลายเซ็น ด้วยชุดคุณลักษณะเหล่านี้เราต้องฝึกเครือข่ายประสาทโดยใช้อัลกอริทึมเครือข่ายประสาทเทียมที่มีประสิทธิภาพ โครงข่ายประสาทเทียมที่ผ่านการฝึกอบรมนี้จะจำแนกลายเซ็นว่าเป็นของแท้หรือปลอมแปลงภายใต้ขั้นตอนการตรวจสอบ
การจดจำใบหน้ามนุษย์
เป็นหนึ่งในวิธีการทางชีวภาพในการระบุใบหน้าที่กำหนด เป็นงานทั่วไปเนื่องจากการกำหนดลักษณะของภาพที่ "ไม่ใช่ใบหน้า" อย่างไรก็ตามหากโครงข่ายประสาทเทียมได้รับการฝึกฝนมาเป็นอย่างดีก็สามารถแบ่งออกเป็นสองประเภท ได้แก่ รูปภาพที่มีใบหน้าและรูปภาพที่ไม่มีใบหน้า
ขั้นแรกภาพที่ป้อนทั้งหมดจะต้องได้รับการประมวลผลล่วงหน้า จากนั้นความมีมิติของภาพนั้นจะต้องลดลง และในที่สุดก็ต้องจำแนกโดยใช้อัลกอริธึมการฝึกอบรมเครือข่ายประสาทเทียม โครงข่ายประสาทเทียมต่อไปนี้ใช้เพื่อวัตถุประสงค์ในการฝึกอบรมด้วยภาพที่ประมวลผลล่วงหน้า -
โครงข่ายประสาทเทียมหลายชั้นที่เชื่อมต่ออย่างเต็มที่ได้รับการฝึกฝนด้วยความช่วยเหลือของอัลกอริธึมการแพร่กระจายกลับ
สำหรับการลดขนาดจะใช้การวิเคราะห์องค์ประกอบหลัก (PCA)