パースペクティブトランスフォーメーション
人間の目が近くのものを見るとき、それらは遠くにあるものと比較して大きく見えます。これは一般的にパースペクティブと呼ばれます。一方、変換とは、ある状態から別の状態へのオブジェクトなどの転送です。
したがって、全体として、透視変換は3Dワールドから2D画像への変換を扱います。人間の視覚が機能するのと同じ原理とカメラが機能するのと同じ原理。
これが発生する理由について詳しく説明します。近くにあるオブジェクトは大きく見え、遠くにあるオブジェクトは、到達すると大きく見えても小さく見えます。
この議論は、基準系の概念から始めます。
参照フレーム:
基準系は基本的に、何かを測定するための値のセットです。
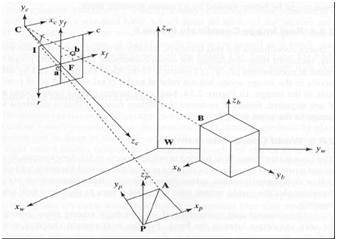
5フレームの参照
3Dの世界/画像/シーンを分析するには、5つの異なるフレームの参照が必要です。
- Object
- World
- Camera
- Image
- Pixel
オブジェクト座標フレーム
オブジェクト座標フレームは、オブジェクトのモデリングに使用されます。たとえば、特定のオブジェクトが他のオブジェクトに対して適切な場所にあるかどうかを確認します。これは3D座標系です。
世界座標フレーム
ワールド座標フレームは、3次元ワールド内のオブジェクトを相互に関連付けるために使用されます。これは3D座標系です。
カメラ座標フレーム
カメラ座標フレームは、カメラに関してオブジェクトを関連付けるために使用されます。これは3D座標系です。
画像座標フレーム
これは3D座標系ではなく、2Dシステムです。これは、3Dポイントが2Dイメージプレーンにどのようにマッピングされるかを説明するために使用されます。
ピクセル座標フレーム
これは2D座標系でもあります。各ピクセルには、ピクセル座標の値があります。
これらの5つのフレーム間の変換
これが、3Dシーンがピクセルのイメージで2Dに変換される方法です。
次に、この概念を数学的に説明します。
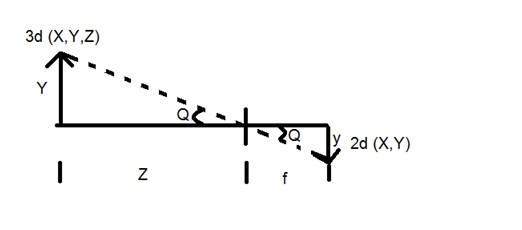
どこ
Y = 3Dオブジェクト
y = 2d画像
f =カメラの焦点距離
Z =オブジェクトとカメラの間の距離
ここで、この変換で形成される2つの異なる角度があり、Qで表されます。
最初の角度は
ここで、マイナスは画像が反転していることを示します。形成される2番目の角度は次のとおりです。

これらの2つの方程式を比較すると、

この式から、カメラから通過した物体に当たった後、光線が反射して戻ると、反転画像が形成されることがわかります。
この例を使用すると、これをよりよく理解できます。
例えば
形成された画像のサイズを計算する
身長5m、カメラから50mの距離に立っている人物の画像を撮影したとします。焦点距離のカメラを使用した場合の人物の画像のサイズは50mmであることがわかります。
解決:
焦点距離はミリメートルなので、計算するにはすべてをミリメートルに変換する必要があります。
そう、
Y = 5000mm。
f = 50mm。
Z = 50000mm。
数式に値を入力すると、次のようになります。

= -5mm。
この場合も、マイナス記号は画像が反転していることを示します。