ภูมิภาคของการบรรจบกัน (ROC)
การแปรผันของช่วงของσซึ่งการแปลงลาปลาซมาบรรจบกันเรียกว่าพื้นที่ของคอนเวอร์เจนซ์
คุณสมบัติของ ROC ของ Laplace Transform
ROC มีเส้นสตริปขนานกับแกนjωในระนาบ

ถ้า x (t) เป็นอินทิกรัลอย่างแน่นอนและมีระยะเวลา จำกัด ดังนั้น ROC คือ s-plane ทั้งหมด
ถ้า x (t) เป็นลำดับด้านขวาแล้ว ROC: Re {s}> σ o
ถ้า x (t) เป็นลำดับด้านซ้ายแล้ว ROC: Re {s} <σ o
ถ้า x (t) เป็นลำดับสองด้านดังนั้น ROC คือการรวมสองภูมิภาค
ROC สามารถอธิบายได้โดยใช้ตัวอย่างที่ระบุด้านล่าง:
Example 1: Find the Laplace transform and ROC of $x(t) = e-^{at}u(t)$
$ LT [x (t)] = LT [e - ^ {at} u (t)] = {1 \ over S + a} $
$ Re {} \ gt -a $
$ ROC: Re {s} \ gt> -a $

Example 2: Find the Laplace transform and ROC of $x(t) = e^{at}u(-t)$
$ LT [x (t)] = LT [e ^ {at} u (t)] = {1 \ over Sa} $
$ Re {s} <a $
$ ROC: Re {s} <a $

Example 3: Find the Laplace transform and ROC of $x(t) = e^{-at}u(t)+e^{at}u(-t)$
$ LT [x (t)] = LT [e ^ {- at} u (t) + e ^ {at} u (-t)] = {1 \ over S + a} + {1 \ over Sa} $
สำหรับ $ {1 \ over S + a} Re \ {s \} \ gt -a $
สำหรับ $ {1 \ over Sa} Re \ {s \} \ lt a $

การอ้างอิงถึงแผนภาพด้านบนขอบเขตการรวมอยู่ระหว่าง –a ถึง a ดังนั้น
$ ROC: -a <Re {s} <a $
เวรกรรมและความมั่นคง
เพื่อให้ระบบมีความเป็นเหตุเป็นผลเสาทั้งหมดของฟังก์ชันการถ่ายโอนต้องอยู่ทางขวาครึ่งหนึ่งของระนาบ

ระบบกล่าวว่าจะเสถียรเมื่อเสาทั้งหมดของฟังก์ชันการถ่ายโอนวางอยู่ทางด้านซ้ายของระนาบ s

ระบบได้รับการกล่าวว่าไม่เสถียรเมื่ออย่างน้อยหนึ่งขั้วของฟังก์ชันการถ่ายโอนถูกเลื่อนไปทางครึ่งขวาของระนาบ
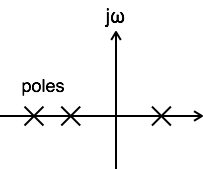
ระบบได้รับการกล่าวว่ามีความเสถียรเล็กน้อยเมื่ออย่างน้อยหนึ่งขั้วของฟังก์ชันการถ่ายโอนอยู่บนแกน j s ของ s-plane

ROC ของฟังก์ชันพื้นฐาน
| ฉ (t) | F (s) | ร็อค |
|---|---|---|
| $ u (t) $ | $$ {1 \ over s} $$ | ROC: Re {s}> 0 |
| $ t \ u (t) $ | $$ {1 \ over s ^ 2} $$ | ROC: Re {s}> 0 |
| $ t ^ n \, u (t) $ | $$ {น! \ กว่า s ^ {n + 1}} $$ | ROC: Re {s}> 0 |
| $ e ^ {at} \, u (t) $ | $$ {1 \ over sa} $$ | ROC: Re {s}> ก |
| $ e ^ {- ที่} \, u (t) $ | $$ {1 \ over s + a} $$ | ROC: Re {s}> -a |
| $ e ^ {at} \, u (t) $ | $$ - {1 \ over sa} $$ | ROC: Re {s} <a |
| $ e ^ {- ที่} \, u (-t) $ | $$ - {1 \ over s + a} $$ | ROC: Re {s} <-a |
| $ t \, e ^ {at} \, u (t) $ | $$ {1 \ over (sa) ^ 2} $$ | ROC: Re {s}> ก |
| $ t ^ {n} e ^ {at} \, u (t) $ | $$ {น! \ over (sa) ^ {n + 1}} $$ | ROC: Re {s}> ก |
| $ t \, e ^ {- at} \, u (t) $ | $$ {1 \ over (s + a) ^ 2} $$ | ROC: Re {s}> -a |
| $ t ^ n \, e ^ {- at} \, u (t) $ | $$ {น! \ over (s + a) ^ {n + 1}} $$ | ROC: Re {s}> -a |
| $ t \, e ^ {at} \, u (-t) $ | $$ - {1 \ over (sa) ^ 2} $$ | ROC: Re {s} <a |
| $ t ^ n \, e ^ {at} \, u (-t) $ | $$ - {n! \ over (sa) ^ {n + 1}} $$ | ROC: Re {s} <a |
| $ t \, e ^ {- at} \, u (-t) $ | $$ - {1 \ over (s + a) ^ 2} $$ | ROC: Re {s} <-a |
| $ t ^ n \, e ^ {- at} \, u (-t) $ | $$ - {n! \ over (s + a) ^ {n + 1}} $$ | ROC: Re {s} <-a |
| $ e ^ {- at} \ cos \, bt $ | $$ {s + a \ over (s + a) ^ 2 + b ^ 2} $$ | |
| $ e ^ {- at} \ sin \, bt $ | $$ {b \ over (s + a) ^ 2 + b ^ 2} $$ |