Hệ thống điều khiển - Đại số sơ đồ khối
Đại số sơ đồ khối không là gì khác ngoài đại số liên quan đến các yếu tố cơ bản của sơ đồ khối. Đại số này đề cập đến biểu diễn bằng hình ảnh của các phương trình đại số.
Kết nối cơ bản cho các khối
Có ba kiểu kết nối cơ bản giữa hai khối.
Kết nối loạt
Kết nối chuỗi còn được gọi là cascade connection. Trong hình sau, hai khối có hàm truyền $ G_1 (s) $ và $ G_2 (s) $ được kết nối theo chuỗi.

Đối với sự kết hợp này, chúng tôi sẽ nhận được đầu ra $ Y (s) $ là
$$ Y (s) = G_2 (s) Z (s) $$
Trong đó, $ Z (s) = G_1 (s) X (s) $
$$ \ Rightarrow Y (s) = G_2 (s) [G_1 (s) X (s)] = G_1 (s) G_2 (s) X (s) $$
$$ \ Rightarrow Y (s) = \ lbrace G_1 (s) G_2 (s) \ rbrace X (s) $$
So sánh phương trình này với dạng chuẩn của phương trình đầu ra, $ Y (s) = G (s) X (s) $. Trong đó, $ G (s) = G_1 (s) G_2 (s) $.
Điều đó có nghĩa là chúng tôi có thể đại diện cho series connectioncủa hai khối với một khối duy nhất. Chức năng chuyển của khối đơn này làproduct of the transfer functionscủa hai khối đó. Sơ đồ khối tương đương được hiển thị bên dưới.

Tương tự, bạn có thể biểu diễn kết nối chuỗi của các khối 'n' với một khối duy nhất. Hàm truyền của khối đơn này là sản phẩm của các hàm truyền của tất cả các khối 'n' đó.
Kết nối song song
Các khối được kết nối trong parallel sẽ có same input. Trong hình sau, hai khối có hàm truyền $ G_1 (s) $ và $ G_2 (s) $ được kết nối song song. Đầu ra của hai khối này được kết nối với điểm tổng.

Đối với sự kết hợp này, chúng tôi sẽ nhận được đầu ra $ Y (s) $ là
$$ Y (s) = Y_1 (s) + Y_2 (s) $$
Trong đó, $ Y_1 (s) = G_1 (s) X (s) $ và $ Y_2 (s) = G_2 (s) X (s) $
$$ \ Rightarrow Y (s) = G_1 (s) X (s) + G_2 (s) X (s) = \ lbrace G_1 (s) + G_2 (s) \ rbrace X (s) $$
So sánh phương trình này với dạng chuẩn của phương trình đầu ra, $ Y (s) = G (s) X (s) $.
Trong đó, $ G (s) = G_1 (s) + G_2 (s) $.
Điều đó có nghĩa là chúng tôi có thể đại diện cho parallel connectioncủa hai khối với một khối duy nhất. Chức năng chuyển của khối đơn này làsum of the transfer functionscủa hai khối đó. Sơ đồ khối tương đương được hiển thị bên dưới.

Tương tự, bạn có thể biểu diễn kết nối song song của 'n' khối với một khối duy nhất. Hàm truyền của khối đơn này là tổng đại số của các hàm truyền của tất cả các khối 'n' đó.
Kết nối phản hồi
Như chúng ta đã thảo luận trong các chương trước, có hai loại feedback- phản hồi tích cực và phản hồi tiêu cực. Hình sau cho thấy hệ thống điều khiển phản hồi tiêu cực. Ở đây, hai khối có hàm truyền $ G (s) $ và $ H (s) $ tạo thành một vòng khép kín.

Đầu ra của điểm tổng là -
$$ E (s) = X (s) -H (s) Y (s) $$
Đầu ra $ Y (s) $ là -
$$ Y (s) = E (s) G (s) $$
Thay thế $ E (các) giá trị $ trong phương trình trên.
$$ Y (s) = \ left \ {X (s) -H (s) Y (s) \ rbrace G (s) \ right \} $$
$$ Y (s) \ left \ {1 + G (s) H (s) \ rbrace = X (s) G (s) \ right \} $$
$$ \ Rightarrow \ frac {Y (s)} {X (s)} = \ frac {G (s)} {1 + G (s) H (s)} $$
Do đó, hàm truyền vòng kín phản hồi tiêu cực là $ \ frac {G (s)} {1 + G (s) H (s)} $
Điều này có nghĩa là chúng ta có thể biểu diễn kết nối phản hồi tiêu cực của hai khối bằng một khối duy nhất. Chức năng truyền của khối đơn này là chức năng truyền vòng kín của phản hồi âm. Sơ đồ khối tương đương được hiển thị bên dưới.

Tương tự, bạn có thể biểu diễn kết nối phản hồi tích cực của hai khối bằng một khối duy nhất. Hàm truyền của khối đơn này là hàm truyền vòng kín của phản hồi tích cực, tức là, $ \ frac {G (s)} {1-G (s) H (s)} $
Đại số sơ đồ khối để tính tổng điểm
Có hai khả năng thay đổi điểm tổng đối với các khối -
- Chuyển điểm tổng kết sau khối
- Chuyển điểm tổng kết trước khối
Bây giờ chúng ta hãy xem những loại sắp xếp nào cần phải được thực hiện trong hai trường hợp trên.
Chuyển điểm tổng kết sau khối
Hãy xem xét sơ đồ khối được hiển thị trong hình sau. Ở đây, điểm tổng hợp hiện diện trước khối.

Điểm tổng có hai đầu vào $ R (s) $ và $ X (s) $. Đầu ra của nó là $ \ left \ {R (s) + X (s) \ right \} $.
Vì vậy, đầu vào cho khối $ G (s) $ là $ \ left \ {R (s) + X (s) \ right \} $ và đầu ra của nó là -
$$ Y (s) = G (s) \ left \ {R (s) + X (s) \ right \} $$
$ \ Rightarrow Y (s) = G (s) R (s) + G (s) X (s) $ (Equation 1)
Bây giờ, hãy chuyển điểm tổng sau khối. Sơ đồ khối này được hiển thị trong hình sau.

Đầu ra của khối $ G (s) $ là $ G (s) R (s) $.
Đầu ra của điểm tổng là
$ Y (s) = G (s) R (s) + X (s) $ (Equation 2)
So sánh phương trình 1 và phương trình 2.
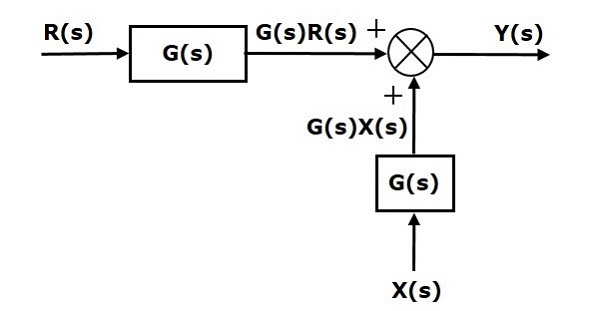
Số hạng đầu tiên $ 'G (s) R (s)' $ giống nhau trong cả hai phương trình. Nhưng, có sự khác biệt trong thuật ngữ thứ hai. Để có được số hạng thứ hai cũng giống nhau, chúng tôi yêu cầu thêm một khối $ G (s) $. Nó có đầu vào $ X (s) $ và đầu ra của khối này được đưa ra làm đầu vào cho điểm tổng thay vì $ X (s) $. Sơ đồ khối này được hiển thị trong hình sau.
Dịch chuyển điểm tổng kết trước khối
Hãy xem xét sơ đồ khối được hiển thị trong hình sau. Ở đây, điểm tổng kết xuất hiện sau khối.
Đầu ra của sơ đồ khối này là -
$ Y (s) = G (s) R (s) + X (s) $ (Equation 3)
Bây giờ, hãy chuyển điểm tổng trước khối. Sơ đồ khối này được hiển thị trong hình sau.
Đầu ra của sơ đồ khối này là -
$ Y (S) = G (s) R (s) + G (s) X (s) $ (Equation 4)
So sánh phương trình 3 và phương trình 4,
Số hạng đầu tiên $ 'G (s) R (s)' $ giống nhau trong cả hai phương trình. Nhưng, có sự khác biệt trong thuật ngữ thứ hai. Để có được số hạng thứ hai cũng giống nhau, chúng tôi yêu cầu thêm một khối $ \ frac {1} {G (s)} $. Nó có đầu vào $ X (s) $ và đầu ra của khối này được đưa ra làm đầu vào cho điểm tổng thay vì $ X (s) $. Sơ đồ khối này được hiển thị trong hình sau.

Đại số sơ đồ khối cho điểm cất cánh
Có hai khả năng thay đổi điểm cất cánh đối với các khối -
- Dịch chuyển điểm cất cánh sau khối
- Dịch chuyển điểm cất cánh trước khối
Bây giờ chúng ta hãy xem loại sắp xếp nào sẽ được thực hiện trong hai trường hợp trên, từng cái một.
Dịch chuyển điểm cất cánh sau khối
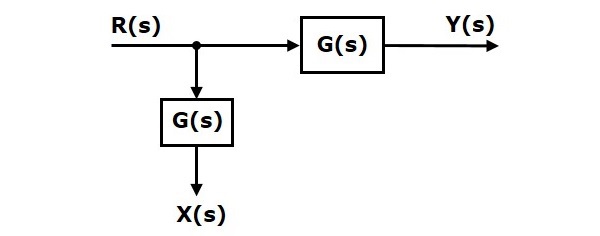
Hãy xem xét sơ đồ khối được hiển thị trong hình sau. Trong trường hợp này, điểm cất cánh có trước khối.

Ở đây, $ X (s) = R (s) $ và $ Y (s) = G (s) R (s) $
Khi bạn dịch chuyển điểm cất cánh sau khối, đầu ra $ Y (s) $ sẽ giống nhau. Tuy nhiên, có sự khác biệt về giá trị $ X (s) $. Vì vậy, để nhận được cùng một giá trị $ X (s) $, chúng tôi yêu cầu một khối nữa $ \ frac {1} {G (s)} $. Nó có đầu vào là $ Y (s) $ và đầu ra là $ X (s) $. Sơ đồ khối này được hiển thị trong hình sau.

Dịch chuyển điểm cất cánh trước khối
Hãy xem xét sơ đồ khối được hiển thị trong hình sau. Tại đây, điểm cất cánh hiện diện sau khối.

Ở đây, $ X (s) = Y (s) = G (s) R (s) $
Khi bạn dịch chuyển điểm cất cánh trước khối, đầu ra $ Y (s) $ sẽ giống nhau. Tuy nhiên, có sự khác biệt về giá trị $ X (s) $. Vì vậy, để nhận được cùng một giá trị $ X (s) $, chúng tôi yêu cầu thêm một khối $ G (s) $. Nó có đầu vào là $ R (s) $ và đầu ra là $ X (s) $. Sơ đồ khối này được hiển thị trong hình sau.