Tương tự điện của hệ thống cơ khí
Hai hệ thống được cho là analogous với nhau nếu thỏa mãn hai điều kiện sau.
- Hai hệ thống khác nhau về thể chất
- Mô hình phương trình vi phân của hai hệ thống này giống nhau
Hệ thống điện và hệ thống cơ khí là hai hệ thống vật lý khác nhau. Có hai loại tương tự điện của hệ thống cơ tịnh tiến. Đó là tương tự điện áp lực và tương tự lực lượng hiện tại.
Tương tự điện áp lực
Trong phép tương tự điện áp lực, các phương trình toán học của translational mechanical system được so sánh với phương trình lưới của hệ thống điện.
Xét hệ cơ tịnh tiến như hình vẽ sau.
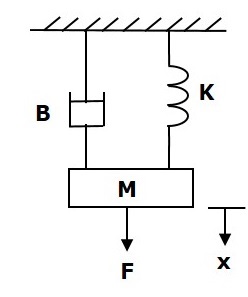
Các force balanced equation cho hệ thống này là
$$ F = F_m + F_b + F_k $$
$ \ Rightarrow F = M \ frac {\ text {d} ^ 2x} {\ text {d} t ^ 2} + B \ frac {\ text {d} x} {\ text {d} t} + Kx $ (Equation 1)
Xét hệ thống điện sau đây như hình vẽ sau. Mạch này bao gồm một điện trở, một cuộn cảm và một tụ điện. Tất cả các phần tử điện này được kết nối trong một loạt. Hiệu điện thế đặt vào đoạn mạch này là $ V $ vôn và cường độ dòng điện chạy qua đoạn mạch là $ i $ Amps.

Phương trình lưới cho mạch này là
$ V = Ri + L \ frac {\ text {d} i} {\ text {d} t} + \ frac {1} {c} \ int idt $ (Equation 2)
Thay thế, $ i = \ frac {\ text {d} q} {\ text {d} t} $ trong Phương trình 2.
$$ V = R \ frac {\ text {d} q} {\ text {d} t} + L \ frac {\ text {d} ^ 2q} {\ text {d} t ^ 2} + \ frac { q} {C} $$
$ \ Rightarrow V = L \ frac {\ text {d} ^ 2q} {\ text {d} t ^ 2} + R \ frac {\ text {d} q} {\ text {d} t} + \ left (\ frac {1} {c} \ right) q $ (Equation 3)
Bằng cách so sánh phương trình 1 và phương trình 3, chúng ta sẽ nhận được các đại lượng tương tự của hệ thống cơ tịnh tiến và hệ thống điện. Bảng sau đây cho thấy các đại lượng tương tự này.
| Hệ thống cơ tịnh tiến | Hệ thống điện |
|---|---|
| Lực lượng (F) | Điện áp (V) |
| Khối lượng (M) | Điện cảm (L) |
| Hệ số ma sát (B) | Kháng cự (R) |
| Hằng số mùa xuân (K) | Đối ứng của điện dung $ (\ frac {1} {c}) $ |
| Độ dịch chuyển (x) | Phí (q) |
| Vận tốc (v) | Hiện tại (i) |
Tương tự, có sự tương tự điện áp mô-men xoắn đối với các hệ thống cơ quay. Bây giờ chúng ta hãy thảo luận về sự tương tự này.
Tương tự điện áp mô-men xoắn
Tương tự như vậy, các phương trình toán học của rotational mechanical system được so sánh với phương trình lưới của hệ thống điện.
Hệ thống cơ quay được thể hiện trong hình sau.

Phương trình cân bằng mômen là
$$ T = T_j + T_b + T_k $$
$ \ Rightarrow T = J \ frac {\ text {d} ^ 2 \ theta} {\ text {d} t ^ 2} + B \ frac {\ text {d} \ theta} {\ text {d} t} + k \ theta $ (Equation 4)
Bằng cách so sánh phương trình 4 và phương trình 3, chúng ta sẽ nhận được các đại lượng tương tự của hệ thống cơ quay và hệ thống điện. Bảng sau đây cho thấy các đại lượng tương tự này.
| Hệ thống cơ quay | Hệ thống điện |
|---|---|
| Mô-men xoắn (T) | Điện áp (V) |
| Mômen quán tính (J) | Điện cảm (L) |
| Hệ số ma sát quay (B) | Kháng cự (R) |
| Hằng số xoắn của lò xo (K) | Đối ứng của điện dung $ (\ frac {1} {c}) $ |
| Độ dịch chuyển góc (θ) | Phí (q) |
| Vận tốc góc (ω) | Hiện tại (i) |
Lực lượng tương tự hiện tại
Tương tự hiện tại, các phương trình toán học của translational mechanical system được so sánh với các phương trình nút của hệ thống điện.
Xét hệ thống điện sau đây như hình vẽ sau. Mạch này bao gồm nguồn dòng, điện trở, cuộn cảm và tụ điện. Tất cả các phần tử điện này được kết nối song song.

Phương trình nút là
$ i = \ frac {V} {R} + \ frac {1} {L} \ int Vdt + C \ frac {\ text {d} V} {\ text {d} t} $ (Equation 5)
Thay thế, $ V = \ frac {\ text {d} \ Psi} {\ text {d} t} $ trong Phương trình 5.
$$ i = \ frac {1} {R} \ frac {\ text {d} \ Psi} {\ text {d} t} + \ left (\ frac {1} {L} \ right) \ Psi + C \ frac {\ text {d} ^ 2 \ Psi} {\ text {d} t ^ 2} $$
$ \ Rightarrow i = C \ frac {\ text {d} ^ 2 \ Psi} {\ text {d} t ^ 2} + \ left (\ frac {1} {R} \ right) \ frac {\ text { d} \ Psi} {\ text {d} t} + \ left (\ frac {1} {L} \ right) \ Psi $ (Equation 6)
Bằng cách so sánh phương trình 1 và phương trình 6, chúng ta sẽ nhận được các đại lượng tương tự của hệ thống cơ tịnh tiến và hệ thống điện. Bảng sau đây cho thấy các đại lượng tương tự này.
| Hệ thống cơ tịnh tiến | Hệ thống điện |
|---|---|
| Lực lượng (F) | Hiện tại (i) |
| Khối lượng (M) | Điện dung (C) |
| Hệ số ma sát (B) | Đối ứng của Kháng cự $ (\ frac {1} {R}) $ |
| Hằng số mùa xuân (K) | Đối ứng của điện cảm $ (\ frac {1} {L}) $ |
| Độ dịch chuyển (x) | Từ thông (ψ) |
| Vận tốc (v) | Điện áp (V) |
Tương tự, có sự tương tự về dòng mômen đối với các hệ thống cơ học quay. Bây giờ chúng ta hãy thảo luận về sự tương tự này.
Tương tự mô-men xoắn hiện tại
Trong sự tương tự này, các phương trình toán học của rotational mechanical system được so sánh với các phương trình lưới nút của hệ thống điện.
Bằng cách so sánh phương trình 4 và phương trình 6, chúng ta sẽ nhận được các đại lượng tương tự của hệ thống cơ quay và hệ thống điện. Bảng sau đây cho thấy các đại lượng tương tự này.
| Hệ thống cơ quay | Hệ thống điện |
|---|---|
| Mô-men xoắn (T) | Hiện tại (i) |
| Mômen quán tính (J) | Điện dung (C) |
| Hệ số ma sát quay (B) | Đối ứng của Kháng cự $ (\ frac {1} {R}) $ |
| Hằng số xoắn của lò xo (K) | Đối ứng của điện cảm $ (\ frac {1} {L}) $ |
| Độ dịch chuyển góc (θ) | Từ thông (ψ) |
| Vận tốc góc (ω) | Điện áp (V) |
Trong chương này, chúng ta đã thảo luận về sự tương tự điện của các hệ thống cơ khí. Các phép loại suy này rất hữu ích để nghiên cứu và phân tích hệ thống không điện giống như hệ thống cơ khí từ hệ thống điện tương tự.